Abstract
Intelligent robotics has the potential to revolutionize various industries by amplifying output, streamlining operations, and enriching customer interactions. This systematic literature review aims to analyze emerging technologies and trends in intelligent robotics, addressing key research questions, identifying challenges and opportunities, and proposing the best practices for responsible and beneficial integration into various sectors. Our research uncovers the significant improvements brought by intelligent robotics across industries such as manufacturing, logistics, tourism, agriculture, healthcare, and construction. The main results indicate the importance of focusing on human–robot collaboration, ethical considerations, sustainable practices, and addressing industry-specific challenges to harness the opportunities presented by intelligent robotics fully. The implications and future directions of intelligent robotics involve addressing both challenges and potential risks, maximizing benefits, and ensuring responsible implementation. The continuous improvement and refinement of existing technology will shape human life and industries, driving innovation and advancements in intelligent robotics.
1. Introduction
The history of robotics dates back to the early days of industrialization when simple automation machines were developed to perform routine and repetitive tasks. In the following decades, further advancements in control engineering and computing enabled the development of more sophisticated robots capable of performing a wider range of tasks. In 1956, the first industrial robot was introduced by George Devol and Joseph Engelberger, which marked a significant milestone in the field of robotics. By the 1970s, robots had become a standard tool in the manufacturing industry, particularly in automotive production. In the following decades, advances in electronic and software engineering, as well as miniaturization, enabled the development of more compact and versatile robots that could be used in various industries. Today, robotic technology is rapidly advancing, with the integration of artificial intelligence (AI) and machine learning (ML) enabling robots to interact independently with their environment and perform more complex tasks.
The most prominent industries where robotics is widely used include manufacturing, healthcare, agriculture, transport, and logistics [1,2,3,4]. In manufacturing, robots are used in various processes, such as assembly, packaging, and welding, due to their accuracy, speed, and consistency. Healthcare is another sector where robots can play a vital role in assisting medical professionals with diagnostics, surgeries, and rehabilitation. In agriculture, robots can be used for various applications, including planting, harvesting, and fertilizing crops, providing advantages such as precision, efficiency, and cost-effectiveness. In the transport and logistics industry, robots can be used in automated warehouses and distribution centers, enabling faster and more accurate processing of orders.
There are several technologies that play a crucial role in the development and functioning of robots, enabling them to perform tasks with increased efficiency, accuracy, and adaptability. The combination of advanced sensor technology [5], AI, and ML has brought about a revolutionary transformation in robotics, surpassing the constraints of conventional automation machines. Sensor technology enables robots to perceive and interact with their surroundings, while AI and ML empower them with enhanced capabilities. These technologies are crucial for achieving the necessary level of automation in robots.
AI and ML algorithms enable robots to analyze vast amounts of data, learn from their experiences, and adapt their operations accordingly [6]. This self-improvement and adaptability are essential for meeting the ever-evolving demands of industrial applications and enhancing productivity across various sectors. In addition, these technologies contribute greatly to the emerging field of intelligent robotics, which aims to develop robots with more advanced cognitive abilities and seamless human–machine collaboration. As technology continues to advance, it is essential for researchers and industries alike to harness these technological breakthroughs to further improve the capabilities and potential applications of robotic technology.
Intelligent robotics has emerged as a thriving field with the potential to revolutionize various industries by enhancing productivity, efficiency, and customer experiences [7]. It refers to the integration of AI, ML, and advanced sensing technologies within robotic systems to enable them to perceive and interact with their environment autonomously, learn from experience, and adapt to new situations [6]. Intelligent robotics entails the enhancement of robots’ capabilities to engage in more intricate interactions with both humans and other automated systems. With advancements in related fields such as AI and sensing technologies, the role of robotics is expected to expand and generate new opportunities for innovation [8]. At the same time, there are challenges related to ethical considerations, data privacy, economic displacement, and environmental concerns that must be addressed [9,10,11,12].
The purpose of this systematic literature review is to provide a comprehensive analysis of the emerging technologies and trends in intelligent robotics. Our research aims to address several key research questions, identified in the subsequent sections, to provide a deeper understanding of the current state of intelligent robotics and its future directions. By conducting a thorough review of the existing literature, we seek to identify the challenges and opportunities associated with the integration of robotics and AI in various sectors. Additionally, we discuss the implications of these technological advancements, identify areas for further research, and propose the best practices for developing and implementing robotic solutions.
This research is motivated by the potential impact of intelligent robotics on various industries and society [13,14] and the need to stay up to date with the latest trends and their potential implications. It is necessary to understand the current state of technology and its challenges to inform future research and development efforts. Furthermore, identifying the potential risks and benefits associated with the use of robotics technology is crucial for effective risk management [15] and the identification of ethical concerns. Finally, there is a need to identify the best practices for developing and implementing robotic solutions, which can be useful for researchers, policymakers, and practitioners [16,17,18]. Hence, the primary objective of this literature review is to offer a thorough examination of the advancing technologies and evolving patterns in intelligent robotics. It seeks to identify obstacles and possibilities while recommending responsible and advantageous integration strategies across diverse sectors.
Our work makes several contributions to the existing literature on intelligent robotics. First, it provides a critical analysis of the current state of the robotics industry, including its challenges, risks, and benefits. Second, it identifies the emerging trends in technology, particularly in areas such as human–robot interaction (HRI), computer-assisted medicine, and ethical considerations. Third, it presents potential applications of intelligent robotics in various sectors, including healthcare, agriculture, construction, and tourism. Fourth, it offers a taxonomy that demonstrates the breadth of applications of intelligent robots and underscores the significant impact these technologies have across various industries. Finally, it proposes the best practices for developing and implementing robotic solutions, which are useful for researchers, policymakers, and professionals in the field.
The structure of the paper is as follows: Section 2 delves into existing literature; Section 3 outlines the research methods used; Section 4 details the findings from the systematic literature review, including study identification, types, and responses to research queries; Section 5 introduces a taxonomy of intelligent robots based on the review’s findings; Section 6 explores the broader implications and potential future research avenues; and Section 7 provides a conclusion to the paper.
2. Related Work
In this section, we critically analyze previous systematic literature reviews (SLRs) in the field of intelligent robotics. Our aim is to identify and highlight any existing gaps in research that these SLRs may not have addressed. By doing so, we seek to offer an understanding of the current state of intelligent robotics research and pinpoint areas that warrant further investigation.
Delmerico et al. [19] conducted an SLR on the current state of the art in rescue robotics research and assessed the readiness of the technologies with respect to the needs of disaster management. Their paper focuses on ground and aerial robots, marine and amphibious systems, and human–robot control interfaces. The current developments in rescue robotics research are discussed, including the use of uncrewed ground and aerial vehicles and snake-like robots in search and rescue operations. The paper also highlights deficiencies in current research in addressing the needs of rescue workers and identifies opportunities for future research directions that will provide enhanced capabilities via the application of robotic technology in disaster management.
The SLR carried out by He et al. [20] primarily focuses on the issues and challenges associated with human-centered intelligent robots. It discusses the recent achievements and developments in the field, focusing on navigation, intelligent control, pattern recognition, and human–robot interaction. The paper also highlights the issues and challenges that researchers face in creating human-centered robots, such as improving navigation systems, ensuring safety, and enhancing communication between humans and robots. The authors emphasize the importance of intelligent techniques in advancing the capabilities and usefulness of robots in assisting and supporting humans in various tasks.
Yang and Chew [21] explored the application of service humanoid robots in the hospitality industry, focusing on the robot developed by the Cardiff Metropolitan University EUREKA Robotics Lab. The study adopts a post-positivist research ontology and phenomenological research philosophy, emphasizing the importance of subjective immersive research and researcher interaction. Data are collected using case research and experimental interviews. The review highlights the challenges and potential impacts of introducing humanoid robots in the hospitality sector, including legal and ethical considerations. It also explores the integration of AI and proposes future research on developing a technical model combining AI. The review concludes by presenting a conceptual model that emphasizes the importance of user–robot interaction, AI-based service models, user data protection, and responsible robot management in the hospitality industry. Future research will further demonstrate and explore these concepts.
Lai et al. [22] provided an overview of the key technologies, application fields, and development trends of intelligent robots. Their review begins by introducing the definition and classification of intelligent robots, distinguishing them from ordinary robots based on their sensory, action, and thinking elements. The paper then explores the key technologies in the field, including intelligent sensing technology, intelligent control technology, human–computer interaction (HCI) technology, intelligent power technology, intelligent material technology, navigation, path planning, and obstacle avoidance technologies. The authors provided examples of intelligent robots in different application fields, including industrial robots, agricultural robots, service robots, and specialized robots. They highlight the importance of intelligent robots in various industries, such as manufacturing, agriculture, healthcare, and space exploration. Finally, the paper discusses the future development trends and research directions for intelligent robots. These include improving language communication functions, enhancing the resemblance and movements of robots to humans, strengthening recovery functions, increasing energy storage, improving logical analysis abilities, providing diverse features, and enabling collaborative robot interactions.
Semeraro et al. [23] conducted a systematic review of recent research on human–robot collaboration (HRC) and ML. The authors analyzed 45 key papers selected from publication databases and categorized them based on the type of collaborative tasks, evaluation metrics, and cognitive variables modeled. They also examined the ML algorithms used and the sensing modalities employed in HRC research. The findings show that collaborative assembly, object handover, object handling, and collaborative manufacturing are common tasks in HRC research. The evaluation metrics used in these tasks include precision of movement, robustness, proof of concept, and reduction in physical workload. In terms of ML algorithms, reinforcement learning (RL) is commonly used to model the cognitive aspects of the robot, while unsupervised learning (UL) is often employed for human motion modeling. Supervised learning (SL) is predominant in object-handling tasks. Composite ML systems are not widely used in HRC research, but there is potential for future exploration, particularly in deep reinforcement learning.
Gordon and Pasvenskiene [24] carried out an in-depth study on the contentious topic of granting human rights to intelligent robots. Their research, grounded in a thorough review of academic and popular literature, critically examines the key arguments and theories in this debate, particularly from ethical and philosophical perspectives. They identify that many counterarguments to robot rights are ethically and philosophically weak. The study also explores the implications of recognizing rights for AI, especially in contexts where robots demonstrate human-like capabilities or are considered morally and legally equivalent to humans. The concept of negative human rights, such as the right to life and freedom from exploitation, is introduced for AI entities. The paper emphasized the urgency of addressing ethical and societal challenges posed by advanced AI and robotics, suggesting the emergence of a robot rights movement and the importance of preparing for evolving human–robot relationships.
Huang et al. [25] completed a meticulous literature review on the use and effects of intelligent physical robots in the healthcare sector. Following Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) guidelines, the authors examined 94 academic papers with the goal of pinpointing the precursors—like individual, organizational, and robot-centric elements—that affect the employment of these robots in healthcare settings. Furthermore, the study scrutinized the outcomes of using robots, covering emotional, attitudinal, behavioral, and health-related effects. A significant contribution of this research is the creation of a comprehensive framework that offers a thorough understanding of both the factors leading to the adoption of robots and their ensuing impacts.
Lee [26] carried out a systematic literature review of the service robot field, analyzing 724 papers published between 1999 and 2021. The author categorized the findings into seven major themes, which include various types of service robots (professional non-social, professional social, domestic/personal non-social, and domestic/personal social) and key technological areas (fetching, detection, navigation, human–robot interaction, and architecture/platform). A total of 70 papers, 10 for each theme, were selected based on criteria such as a focus on technical development, design, implementation, and human–robot interaction. The paper highlights the interdisciplinary nature of service robotics, involving fields like computer science, engineering, AI, and ergonomics. It emphasizes the role of service robots in lowering service costs, improving service speed, and enhancing customer interactions across multiple industries. The research points out the rapid growth of service robot capabilities due to technological innovations and the increased demand accelerated by the COVID-19 pandemic. Given the constant evolution of service robots, this paper also discusses the need for further research in areas such as safety, security, privacy, and ethics.
Hentout et al. [27] completed a systematic literature review on human–robot interaction in the context of industrial collaborative robots (cobots), covering research from the period of 2008 to 2017. Their analysis focuses on the evolution and enhancement of interaction systems between humans and robots within manufacturing environments. The study investigates the integration of collaborative systems into existing manufacturing settings, emphasizing the need for plant restructuring and workforce training. It highlights the importance of advanced sensor technologies and safety solutions in ensuring efficient and secure human–robot collaborations. Moreover, the paper explores the significant role of AI in optimizing interactions and task execution in these environments. While recognizing the considerable advancements in HRI, the authors also point out the existing gap between research and its practical application in industrial scenarios, shedding light on the challenges and potential future directions in the field of HRI and cobots.
The review conducted by Atman Uslu et al. [28] critically examines educational robotics and robots (ERR) in education, focusing on identifying trends and gaps in the field. Analyzing 93 articles from the Social Science Citation Index, the study highlights a significant lack of theoretical frameworks in most ERR research, underscoring the need for integrating pedagogical theories in ERR-based learning and teaching. It also points out deficiencies in the literature on ERR’s interdisciplinary applications, emphasizing the necessity for more detailed reporting on the integration of ERR across disciplines. Furthermore, the study critically evaluates the experimental findings on ERR, noting a disparity between claims and actual results, especially regarding ERR’s impact on learning outcomes, emotional processes, and social skills development. This highlights the importance of more rigorous research to validate ERR’s educational benefits. Additionally, the study stresses the potential of ERR in enhancing higher-order thinking skills and the need for well-designed interventions to establish cause-and-effect relationships. The review sets a clear direction for future research, advocating for a theory-driven and methodologically robust approach to studying the impact of ERR in educational settings.
Halder and Afsari [29] conducted a thorough synthesis of research on robotic inspection in the built environment, analyzing 269 papers via qualitative content analysis. It primarily categorizes robots used in building and infrastructure inspection by their locomotion and identifies five key application domains: post-construction maintenance, construction quality inspection, progress monitoring, as-built modeling, and safety inspection. Drones and wheeled robots are noted as the most prevalent, alongside other custom-designed robots. Significantly, the study pinpoints eight research areas within robotic inspection: autonomous navigation, knowledge extraction, motion control systems, sensing, safety implications, multi-robot collaboration, human–robot collaboration, and data transmission. By highlighting these areas, the study offers a comprehensive view of the current research landscape and suggests directions for future exploration.
The review completed by Wang et al. [30] presents an in-depth analysis of intelligent techniques in welding systems, emphasizing the integration and advancement of intelligent welding systems (IWS). The study provides a comprehensive overview of the current state of IWS, exploring how various robotic technologies, particularly drones and wheeled robots, are being employed for different aspects of welding, including inspection, maintenance, and monitoring. Key research areas such as autonomous navigation, motion control, and collaborative systems are discussed, highlighting the growing importance of ML algorithms in enhancing the efficiency and adaptability of these systems. The paper also delves into the challenges of integrating these technologies to create more autonomous, efficient, and intelligent welding solutions. This includes a focus on developing hybrid models that combine traditional welding knowledge with advanced data-driven approaches, aiming to optimize decision making and control in IWS. The research underscores the potential of IWS in transforming the welding industry, pointing toward a future where intelligent systems play a pivotal role in improving the precision and effectiveness of welding processes.
The review conducted by Zhou et al. [31] examines robotic fruit harvesting, focusing on two key areas: comparing robot performance against crucial commercial viability indicators (harvest success rate, cycle time, damage rate) and investigating reasons for the inadequate performance of current harvesting robots. The study presents a comprehensive analysis of 47 robotic applications over 20 years, revealing a significant gap between technology and commercial viability. It highlights the need for better integration and optimization of robotic subsystems and proposes a novel map linking environmental challenges with growers’ needs. This map identifies key research directions, such as improved vision systems and tactile sensing, to advance robotic harvesting toward commercialization. The study also addresses both direct and indirect fruit damage during harvesting, offering insights into potential improvements in the field.
Hossain [32] provided a comprehensive review of the literature on autonomous delivery robots (ADRs), encompassing both academic and non-academic sources. It synthesizes insights from 138 articles, categorizing ADRs into three forms: Sidewalk Autonomous Delivery Robots (SADR), Road Autonomous Delivery Robots (RADR), and mothership van models. The review reveals a burgeoning interest in the technological aspects of ADRs, although broader business and management research remains limited. Key findings include the effectiveness of RADRs for short-range deliveries and the potential cost savings of ADRs. However, comparisons with traditional delivery methods are still emerging. Customer acceptance and infrastructure compatibility are identified as significant challenges, with ADRs requiring customer adaptation for item collection and facing hurdles in urban infrastructure and regulatory environments. The review emphasizes the growing potential of ADRs in various sectors, especially e-commerce, highlighting the importance of considering consumer attitudes, city policies, and regulatory issues for effective deployment. The study suggests that businesses need to experiment with different ADR models and understand psychological determinants across customer segments to maximize the benefits of ADR deployment.
Naneva et al. [33] conducted a comprehensive analysis of people’s beliefs about social robots, synthesizing a wide range of literature to assess attitudes, acceptance, anxiety, and trust toward these robots. Using a novel method akin to meta-analysis, the review standardizes measures from various studies, revealing a generally positive public perception toward social robots. This positive attitude is especially significant in domains like healthcare and education, indicating potential for adoption. However, the review also suggests that while positive feelings are important, they are just one of many factors influencing the future of human–robot relationships. It recommends applying intergroup relations and attitude–behavior theories to better understand these dynamics. The study underscores the unique complexities of social robots, suggesting they represent not just a technological advancement but a potential new social group.
In contrast to the existing SLRs, our systematic literature review provides a more comprehensive and contemporary analysis of the field of intelligent robotics, addressing a wider range of research questions and encompassing various disciplines. Additionally, our study investigates the ethical considerations, best practices, and future directions for the responsible development and implementation of intelligent robotics. As such, our systematic literature review synthesizes current research findings and explores the most recent trends and innovations in intelligent robotics, contributing to the academic discourse by identifying knowledge gaps and potential research opportunities in this rapidly expanding field.
3. Research Method
To conduct a systematic literature review, we adhered to a well-defined methodology, following the guidelines by Linnenluecke et al. [34]. Our review was structured around the following six research questions addressing the state of robotics technology, its applications, industry trends, and developmental best practices, along with potential risks and benefits:
- How do advances in robotics and AI technology affect current industry trends?Advances in robotics and AI technology have a significant impact on current industry trends, particularly in the context of Industry 4.0. The integration of these technologies into industrial processes enables greater automation, efficiency, and customization, leading to several transformative effects. The research paper by Gajdzik et al. [35] provides a theoretical basis for understanding the implementation of Industry 4.0 and its implications for industry trends. The paper highlights the concept of Industry 4.0 as the result of the fourth industrial revolution, which combines operational technology and information technology in production.
- What is the current state of robotics technology, and what challenges need to be addressed in order to further its development?The current state of robotics technology and the challenges that need to be addressed for its further development are critical areas of study. The theoretical basis for this research question lies in the rapid progress and increasing integration of robotics technology in various sectors such as manufacturing, healthcare, and agriculture [2,3,4]. Robotics has evolved from basic industrial robots performing repetitive tasks to sophisticated autonomous systems capable of complex decision making and interaction with humans. Understanding the current state of robotics technology involves analyzing the advancements in hardware components, such as sensors, actuators, and materials, as well as software algorithms and AI techniques that enable perception, cognition, and control.
- What are the current and future applications of robotic technology in various industries?Robotic technology has witnessed significant advancements and has been increasingly integrated into diverse industries, offering possibilities for automation, enhanced efficiency, and new functionalities. Examining the current applications and envisioning future prospects provides valuable insights into the transformative potential of robotics across various domains. The research question is motivated by the ongoing developments in robotic technology, which have led to its expanding presence in various industries. By analyzing the existing applications, researchers can comprehend the current landscape of robotic technology and its relevance in different sectors. Furthermore, the research question explores the future applications of robotic technology. As advancements continue, new opportunities and challenges arise. Anticipating future possibilities allows researchers to identify emerging trends and potential areas for growth.
- What are the potential risks and benefits associated with the increased use of robotic technology?This research question is founded on the need to critically analyze the broader implications of the growing utilization of robotic technology in various domains. As robotic technology continues to advance and become more prevalent, it is essential to understand the potential consequences and impacts it may have on society, industries, and individuals [36]. By identifying and evaluating the potential risks, such as job displacement, ethical concerns, safety issues, and privacy considerations, researchers can assist in developing strategies to mitigate these challenges. Simultaneously, investigating the benefits associated with increased robotic technology usage helps to identify areas where robotics can bring positive impacts, such as increased productivity, improved efficiency, and enhanced safety.
- What are the best practices for developing and implementing robotic technologies?Motivated by the dynamic and evolving nature of robotic technologies, this research question acknowledges the importance of establishing best practices to optimize their development and implementation processes. Robotics involves a convergence of disciplines such as engineering, computer science, artificial intelligence, and human–computer interaction. By investigating the best practices, researchers can draw upon established methodologies, principles, and lessons learned to guide the development and implementation of robotic technologies. This research question also seeks to address the need for standardization [37] and knowledge sharing [38] within the robotics community. By identifying and documenting best practices, researchers can create a common foundation and establish a collective understanding of the most effective strategies for developing and implementing robotic technologies. This fosters collaboration, encourages innovation, and ensures that advancements in the field are built upon established principles and methodologies.
- How can existing robotic technology be improved to better meet the demands of the future?The motivation behind this research question lies in the recognition that existing robotic technology may need enhancements to adapt to changing circumstances and emerging needs. As technology advances and new demands arise, it becomes crucial to identify areas of improvement to make existing robotic systems more capable, efficient, and versatile. Robotics technology has already made significant strides in various industries, but there are areas that require attention and enhancement, such as the cost of robotic technology [39] and resistance to the adoption of robots in certain sectors [40]. By exploring ways to improve existing technology, researchers can bridge the gap between current capabilities and the expectations and demands of the future.
We utilized the following comprehensive search strings to thoroughly cover the relevant literature:
- “intelligent robotics” AND “robotics development”;
- “human-robot interaction” AND (“machine learning” OR “artificial intelligence”) AND “user experience”;
- “intelligent robotics” AND “applications” AND (“challenges” OR “risks”);
- (“robotics” OR “intelligent robotics”) AND “industry trends”.
This extensive search was conducted between April and May 2023 across several databases, including Google Scholar, ScienceDirect, ACM, Springer Link, Emerald Insight, IEEE Xplore, MDPI, SAGE Journals, Taylor and Francis Online, Hindawi, and Inderscience.
The selection of literature was based on its relevance to our research questions, the quality of the sources, and publication from 2015 to 2023. We focused on ensuring that the content directly addressed the research questions, keeping the review concentrated on relevant issues within the field. Only peer-reviewed articles were included, following a systematic approach to maintain the accuracy and relevance of the review.
We established specific inclusion and exclusion criteria to filter the literature, aiming to encompass studies that significantly contribute to the research questions and provide valuable insights into intelligent robotics. Works not aligned with our research focus, of lower quality, or outdated were omitted.
To add integrity to our review process, we utilized the PRISMA flow diagram. This ensured a transparent and methodical evaluation of the literature, bolstering the reliability of our findings and discussions.
4. Results
4.1. Identification of Studies
By developing a search query and conducting it across 11 different databases, we initially identified a total of 47,681 records. During the initial refinement stage, 47,470 articles were removed after title examination due to their irrelevance to our study’s topic and scope, leaving us with 211 potentially relevant articles. A preliminary assessment of abstracts led to the further exclusion of 125 records, narrowing the pool down to 86 potential articles. Of these, four were inaccessible, and seven were discarded for not being research articles. Additionally, 18 papers were excluded for not being published within the specified timeframe of 2015 to 2023. We also identified and removed four duplicates. Finally, 1 non-English paper was eliminated, culminating in a selection of 52 studies for the systematic literature review. Table 1 summarizes the distribution of the initial and final groups of studies across the various academic databases, while the process of study selection is depicted using a PRISMA flow diagram in Figure 1.

Table 1.
The initial and final set of studies found in relevant databases.
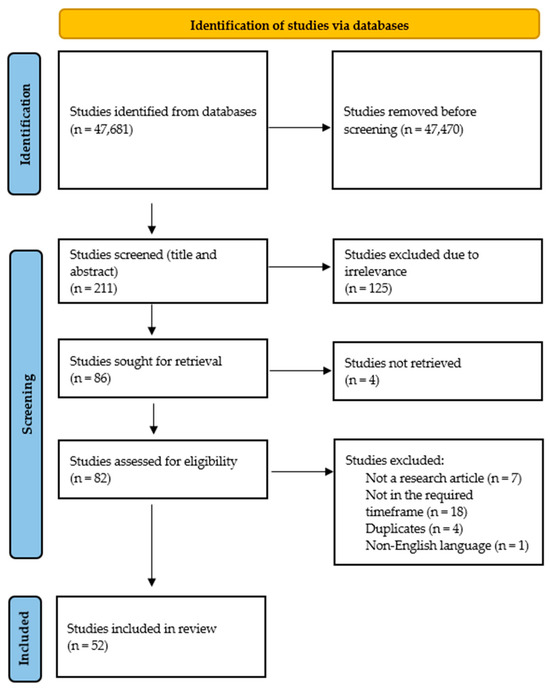
Figure 1.
PRISMA flow diagram of studies selection procedure.
4.2. The Bibliometrics of the Selected Studies
The selected studies for this systematic literature review on intelligent robotics can be broadly categorized into four groups:
- Literature reviews or surveys (29%): These papers provided a comprehensive overview of existing knowledge, breakthroughs, and challenges in various aspects of intelligent robotics by synthesizing the existing literature. Examples of the papers in this category include [19,20,21,22,23,29,41,42,43,44,45,46,47,48,49].
- Design and development research papers (13%): These papers presented novel designs or novel developments in robotics technology, often proposing innovative solutions to address a specific challenge. Examples of the papers in this category include [50,51,52,53,54,55,56].
- Exploratory research papers (54%): These papers investigated specific aspects of intelligent robotics, such as applications, challenges, risks, or best practices, to gain insights into the state of the field or uncover patterns and associations between variables. Examples of the papers in this category include [57,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83,84].
- Summaries (4%): These papers provided a summary of the key findings, reflections, recommendations, or best practices in the field of intelligent robotics, often presenting the outcomes of larger projects, workshops, or panels. Examples of the papers in this category include [85,86].
Figure 2 displays a chart that illustrates the proportional breakdown of the mentioned categories across the 52 selected studies.
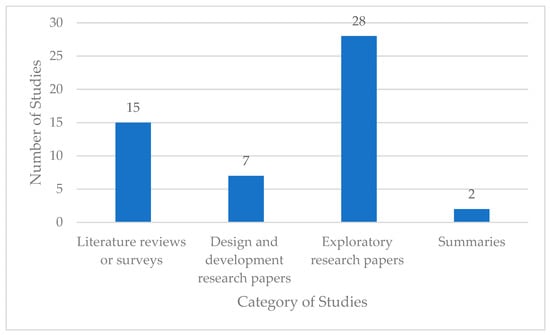
Figure 2.
Distribution of the selected studies by category.
In Figure 3, there is a chart showing the timeline of the selected studies. It is evident that most of the studies were published in the years 2020 and 2021. The years 2015 and 2016 each had four studies, while 2017 saw seven studies, 2018 had five, 2019 had one, 2022 had seven, and 2023 had four studies.
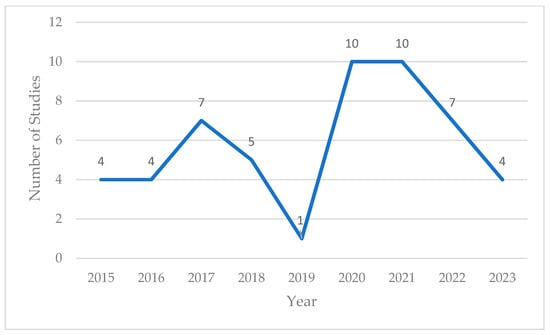
Figure 3.
Distribution of the selected studies by year of publication.
Figure 4 displays the distribution of selected studies based on the organizations responsible for publishing the research. It is evident that the majority of the selected studies (30.77%) originate from publications released by Elsevier, followed by Springer (25%), while the remaining 44.23% of selected studies are found in publications from 15 different publishers.
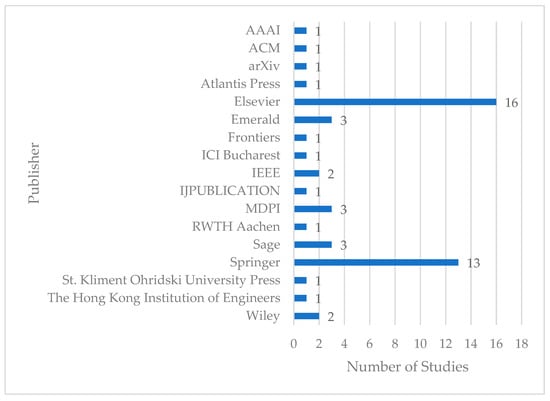
Figure 4.
Distribution of the selected studies by publisher.
Out of the total 52 selected studies, 45 (86.54%) were published in journals, 6 (11.54%) were published in conference proceedings, and 1 (1.92%) was posted on arXiv.
Two papers each were published in the following journals: International Journal of Social Robotics, Journal of Intelligent & Robotic Systems, Journal of Manufacturing Systems, Robotics and Autonomous Systems, and Robotics and Computer-Integrated Manufacturing. The remaining 35 journals each featured one selected paper. The distribution of the selected studies across journals in which they were published is presented in Table 2.
Table 2.
The distribution of selected studies across the journals.
Conference proceedings provided a complementary perspective, offering an opportunity to explore cutting-edge research and developments in the field of intelligent robots and their applications. These conferences hosted discussions and presentations from experts and practitioners in robotics, artificial intelligence, and their interdisciplinary applications. Table 3 displays the distribution of selected studies across conference proceedings.
Table 3.
The distribution of selected studies across conference proceedings.
4.3. Answers to Research Questions
The primary aim of this systematic literature review is to provide an in-depth analysis of the emerging trends and technologies in the field of intelligent robotics. In this section, we present the answers to the six research questions we formulated, drawing on the findings of our review of relevant literature.
4.3.1. How Do Advances in Robotics and AI Technology Affect Current Industry Trends?
The rapid advancements in robotics and AI technologies have ushered in a new era of innovation and transformation across industries. These technologies are revolutionizing traditional practices, optimizing processes, and enabling novel applications, shaping the way humans and robots work together in various sectors [57]. In this section, we delve into the impact of these advances on current industry trends.
In the manufacturing industry, advances in robotics and AI technology are driving the development of smart factories and the integration of human skills with automated machines [58]. Smart manufacturing, enabled by technologies like cloud computing, Internet of Things (IoT), big data analysis, and artificial intelligence, connects intelligent manufacturing processes to digital twins, allowing for real-time information, informed decision making, and enhanced efficiency. Human–robot collaboration is gaining attention, providing solutions for societal challenges and improving flexibility in production processes [41]. Integration of sensors, fusion of sensory information, and autonomous ground vehicles contribute to enhanced robotics capabilities in smart factories. In the field of welding, a welding task data model enhances the intelligence and efficiency of robotic welding processes, addressing the limitations of current approaches [50].
In e-commerce logistics, the integration of robotics promises a paradigm shift by improving efficiency, scalability, and flexibility in logistics automation systems. Utilizing mobile robots in areas like order picking and warehousing enhances efficiency and adaptability, allowing e-commerce operators to handle fluctuating demands effectively [59]. Emerging technologies, such as G2R and R2G automated order fulfillment systems, replace human pickers, reducing costs and improving accuracy. The LASS business model fosters collaboration among stakeholders and provides efficient and cost-effective services.
In the tourism sector, the integration of robotics, alongside AI, has led to remarkable advancements in services and customer experiences [60]. From robotic receptionists in hotels to guides and assistants at airports, robots have seamlessly blended into the hospitality landscape [21]. The use of robotics technology in conjunction with AI-powered systems like facial recognition and virtual reality has paved the way for hassle-free check-ins, immersive experiences of destinations, and heightened personalization. By leveraging robotics and AI technology, the tourism industry has redefined service standards, offering innovative solutions that elevate the overall customer experience.
The agricultural sector is also experiencing the impact of robotics and AI technology, with the use of low-cost robots equipped with computer vision (CV) and artificial intelligence revolutionizing precision agriculture and addressing challenges in data acquisition and analysis. These robots enable the detailed analysis of plant characteristics via quantitative measurements, leading to improved crop management [51].
Advances in robotics and AI technology have significantly impacted current industry trends within the context of Industry 4.0 and the Industrial Internet of Things (IIoT), promoting the use of collaborative robots (cobots) in industrial settings [61]. Cobots enable humans and robots to exchange information and share tasks, leading to increased efficiency, productivity, and flexibility in manufacturing [41]. The evolution from Robotics 1.0 to Robotics 4.0 represents the progression of robotics, with Robotics 4.0 integrating disruptive technologies such as the internet of robots, Brain-on-Cloud, and Artificial Intelligence of Things [61].
Despite the substantial impact and potential benefits of incorporating AI within the robotics sector, challenges such as high costs, job displacement, and potential socioeconomic inequalities exist [62]. It is crucial to consider the benefits, challenges, and ethical implications of AI and robotics technology to effectively navigate the emerging trends and ensure a balanced approach toward their adoption.
In conclusion, advances in robotics and AI technology have reshaped current industry trends and profoundly impacted sectors such as manufacturing, logistics, tourism, and agriculture. Via their integration, operational efficiency, flexibility, and productivity have been enhanced. As these technologies continue to evolve and become more sophisticated, it will be essential to address challenges and concerns and maximize the benefits they bring to various industries. The answers to the first research question are summarized in Table 4.
Table 4.
Impact of robotics and AI on different industries.
4.3.2. What Is the Current State of Robotics Technology and What Challenges Need to Be Addressed in Order to Further Its Development?
The current state of robotics technology has witnessed remarkable advancements in various fields, offering tremendous potential for transforming industries and improving human lives. Fields such as service robotics [42], computer-assisted medicine and robotic surgery [43], educational robotics [63], and human–machine interaction [64] have all made substantial progress. However, despite these advancements, numerous challenges need to be addressed in order to further develop robotics technology.
One major challenge is the real-world applicability of service robots, which struggle in unknown environments [42]. This indicates a need for open-ended learning techniques and improvements in object manipulation. Human factor professionals must be more involved in human–robot interaction research to address safety and acceptability issues [64]. Furthermore, the development of intelligent and collective robots, such as micROS, presents challenges in implicit knowledge extraction, global role assignment optimization, and human–machine intelligence coordination [52].
In medicine, challenges persist in terms of adapting treatment forms, promoting interoperability, and establishing robust safety and performance standards [43]. Additionally, high costs and social apprehensions regarding job automation and displacement of labor have hindered the widespread implementation of robotics. The COVID-19 pandemic revealed the potential of robotics in healthcare for maintaining social distancing and performing essential tasks, but scalability, flexibility, and autonomous functionality remain issues to be addressed [44].
Model-based reinforcement learning (RL) has been successfully deployed in various tasks but lacks reliable and robust applications in service and industrial robotics [45]. Addressing challenges in human collaboration, compliant manipulation, and noisy sensing is essential for applying model-based RL in more complex domains. Soft robotics, capable of efficient and robust movements, present a promising direction for the future, but developing comprehensive solutions, compensating for environmental uncertainties, and ensuring safe human interaction are necessary [46].
The social aspects of robotics require a thorough understanding of employees, work dynamics, collaboration, managerial roles, well-being, and career advancement [65]. Addressing ethical implications via visible digital ethics and effective regulation is crucial, as is evaluating the effectiveness of computer vision and developing user-friendly interfaces for educational robotics [63]. Lastly, human–robot collaboration requires advancements in quantitative validation, complex cognitive processing, physical robot limitations, sensing modalities, and comprehensive performance metrics [23].
To summarize, while the current state of robotics technology has the potential to revolutionize various sectors, addressing these numerous challenges is essential to propel its development further. Collaboration between researchers, professionals, and stakeholders, as well as the adoption of advanced technologies, will facilitate the advancement of robotics and its broader adoption across domains. The responses to the second research question have been condensed into Table 5.
Table 5.
Robotics technology development: status and challenges.
4.3.3. What Are the Current and Future Applications of Robotic Technology in Various Industries?
Robotic technology has emerged as a game-changer across various industries, holding vast potential for current and future applications [19,44,50]. In the healthcare industry, robotic technology has shown promising results, particularly amid the COVID-19 pandemic, for tasks such as disinfection, monitoring, and telepresence [44]. Assistive robots and systems have demonstrated potential in addressing elderly care challenges [47], while surgical robotics and computer-assisted surgery have been employed to enhance patient care with the integration of artificial intelligence [43].
In the education sector, the potential of educational robotics in mathematics education has been explored, with benefits in teaching and learning mathematical concepts, fostering collaboration, and developing computational thinking [66]. Robotic technology has further been adopted for various applications in the manufacturing and welding industry, emphasizing the significance of intelligent process planning [50].
Applications of measuring intelligent robots have been introduced in the construction industry for building deformation monitoring, offering advantages such as cost reduction, increased accuracy, and improved efficiency [54]. Robots in the inspection and monitoring of buildings and infrastructure have been employed, showcasing improved safety, efficiency, and accuracy [29]. Uncrewed ground vehicles (UGVs) and aerial drones have been deployed in search and rescue (SAR) operations and disaster management [19].
Intelligent surveillance robots have found applications in diverse industries such as farms, housing, factories, and warehouses [55]. Humanoid robots, or “social robots,” have been employed in libraries for various tasks, improving user experiences [67]. In food delivery settings, robotic technology has shown promise in revolutionizing processes and providing better services [56].
The integration of advanced technologies such as natural interfaces and speech recognition, AI, 5G, big data, and context-awareness technology can further enhance the capabilities of robots in various sectors. However, challenges related to affordability, accessibility, ethical, legal, and privacy implications must be overcome for wider adoption [47,67].
Future research should address these challenges and continue to explore the potential applications and capabilities of robotic technology across industries, emphasizing adaptability and modularity in robot designs [19]. Collaborative efforts and competitions can contribute to advancing robotic technology, specifically in urban search and rescue applications and the construction industry [29].
In conclusion, robotic technology holds great potential for revolutionizing various industries. Several applications have been demonstrated in healthcare, education, manufacturing, construction, libraries, and more. The integration of advanced technologies and overcoming challenges are essential for tapping into the broader potential of robotic technology. Further research and development efforts are needed to optimize the capabilities of robotic technology in various sectors and fully harness its potential. The summary of the responses to the third research question is presented in Table 6.
Table 6.
Current and future applications of robotic technology in various industries.
4.3.4. What Are the Potential Risks and Benefits Associated with the Increased Use of Robotic Technology?
The increased use of robotic technology has sparked both excitement and concern within society. As robotics continues to advance and integrate into various sectors, it is crucial to examine the potential risks and benefits associated with its widespread adoption. In this section, we delve into the multifaceted aspects of the risks and benefits linked to the increased use of robotic technology.
Granting moral rights to artificially intelligent robots depends on their possession of moral reasoning and decision-making capabilities. Gordon [68] specifically emphasizes the importance of intelligent robots learning to make moral decisions as they become more involved in sensitive fields and interact with humans. The arrival of artificially intelligent beings is predicted to revolutionize our way of living, but whether this brings good or bad fortune depends on our willingness to embrace these artificial beings. The potential risks include ethical concerns, an unpredictable future, and the need for careful management of the human–artificial being relationship [69,70].
The integration of physical robots alongside human labor can enhance production and efficiency, while intelligent robots expand economic operations and enable automation via blockchain technology [69]. This facilitates peer-to-peer payments and simplifies transactions. The proposed framework grants intelligent robots flexibility and some contractual freedom, fostering increased demand. However, complete autonomy for robots remains unfeasible, as the final approval of contractual frameworks rests with humans. The integration of robotics and AI raises complex questions surrounding legislation, security, ethics, and governance [70]. Institutions must adapt and self-regulate to ensure fair use of these technologies. The social and ethical implications of widespread robotics adoption require careful examination and awareness.
In the context of intelligent service robots, specifically focusing on on-demand self-driving transportation and robotic bartenders, cognitive trust plays a significant role in the adoption of service robots [71]. Trusting beliefs, which are measured in terms of functionality, helpfulness, and reliability, positively affect trusting intention and the likelihood of using service robots. However, negative attitudes toward robots and technology can hinder the development of trust.
Human-centered intelligent robots have become increasingly prevalent in daily life, serving as assistants, secretaries, or companions and performing intelligent functions. Despite progress, challenges related to human-centered robots remain. This suggests that there are inherent risks and challenges associated with the increased use of robotic technology. The benefits include increased efficiency, assistance, and companionship in various domains. However, there are risks related to ethics, safety, privacy, and potential disruptions to employment and social dynamics [20].
In the construction industry, automation offers a solution to overcome the limitations of conventional construction methodologies. Automation could lead to improved performance, increased efficiency, enhanced productivity, and the ability to overcome existing limitations in conventional construction methodologies [72]. By integrating robotics and automation into the built environment, there is a possibility of creating smarter, more adaptable, and sustainable structures.
Risks associated with the increased use of robotic technology also include job displacement due to the potential substitution of human tasks, as well as the dependency on users or enterprises utilizing the technology, which may lead to errors or disruptions if not adequately trained or consistent. On the other hand, benefits include improved efficiency and productivity via task segmentation and automation, leveraging the precision, speed, and consistency of robots [73].
In the travel, tourism, and hospitality industries, the increased use of robotic technology offers potential benefits such as improved efficiency, enhanced customer experiences, and cost savings [74]. However, there are also potential risks to consider, including workforce displacement, the need for public acceptance, and employee resistance. Future research should explore how the public perceives the introduction of robotic technologies and investigate ways to incorporate these technologies into operations while addressing employee attitudes and maintaining corporate culture.
To summarize, the widespread adoption of robotic technology presents both risks and benefits. Instituting proper ethical frameworks, policy changes, and self-regulation are essential to mitigate the risks and maximize the benefits of this technology. By understanding and addressing these challenges, we can better prepare for the inevitable integration of robotics and AI into various aspects of our lives. Table 7 offers a comprehensive summary of potential risks related to the heightened utilization of robotic technology, while Table 8 provides an overview of potential benefits.
Table 7.
Potential risks associated with increased use of robotic technology.
Table 8.
Potential benefits associated with increased use of robotic technology.
4.3.5. What Are the Best Practices for Developing and Implementing Robotic Technologies?
Developing and implementing robotic technologies necessitate the careful consideration of the best practices for ensuring successful integration and maximizing their potential benefits. In this section, we explore the key factors and strategies that contribute to the effective development and implementation of these technologies.
Intelligent controls, including adaptive impedance controllers and model predictive control schemes, play a crucial role in enhancing the capabilities of human-centered robots [20]. These intelligent control methods enable robots to adapt to different scenarios and interact effectively with humans. A systematic approach to design and evaluation is crucial to ensure efficiency and effectiveness [48]. This includes conducting thorough assessments at each stage of development to avoid repeating designs and failures. Additionally, prioritizing human-centric design and interaction is essential. Robots should be designed to engage with humans in an interpersonal and human-like manner, utilizing various modalities for seamless and meaningful interactions.
The concept of a robot’s living space and its relationship with humans is crucial [75]. Advanced sensors, AI integration, and advanced actuators are essential components to enable accurate perception, intelligent decision making, and flexible movement. Additionally, leveraging the capabilities of cyberspace and advanced technologies plays a significant role in developing effective robotic systems [85].
Conducting comprehensive risk assessments that go beyond focusing solely on physical factors is a critical best practice for both industrial and collaborative robotics [76]. This involves including psychological and organizational perspectives and analyzing hazards from different perspectives to ensure a thorough risk assessment process.
Organizations should prioritize adherence to voluntary industry consensus standards [77], such as the ANSI/RIA R15.06-2012 safety standard [87]. In addition to industry standards, organizations are encouraged to consult supplemental technical reports that offer further insights and guidance on specific aspects of robotic systems.
Researchers must also pay attention to human affective responses to working with robots when implementing these technologies [78]. By assessing and monitoring employee affective responses, organizations can implement targeted measures to enhance the work environment and avoid negative consequences.
Moreover, learning from industry leaders is key to understanding software engineering practices specific to robotics [86]. Companies like JPL, Bosch, Waymo, and XITASO offer valuable insights into the state of the practice, including system architecture, testing, simulation, and maintenance.
Best practices in the context of developing and implementing robotic technologies refer to the most effective and efficient methods, strategies, or procedures that have been recognized via experience and research as leading to optimal results. These practices typically encompass a range of actions or guidelines intended to maximize performance, safety, interoperability, and user satisfaction while minimizing errors, risks, and costs.
To assess these best practices, several criteria are typically considered:
- Effectiveness: evaluating how well the practice achieves its intended outcome.
- Efficiency: assessing the cost-effectiveness and resource utilization of the practice.
- Adaptability: understanding how easily the practice can be adapted to different contexts or environments.
- Safety: ensuring that the practice maintains or improves safety standards for users and operators.
- User Satisfaction: gauging the response of end-users, including ease of use, user experience, and overall satisfaction.
- Compliance with Standards: checking adherence to industry standards, legal requirements, and ethical guidelines.
- Innovativeness: the degree to which the practice incorporates new ideas, technologies, or methods.
In the context provided, it is not explicitly mentioned whether these best practices were reviewed based on fiscal or social considerations. However, given the multifaceted nature of robotic technology, it is likely that both aspects were considered:
- Fiscal Considerations: This includes cost-effectiveness, resource optimization, and economic impact. Practices are assessed based on their ability to deliver value, reduce costs, and contribute to the financial sustainability of the project or organization.
- Social Considerations: This encompasses human-centric design, ethical considerations, psychological and organizational impacts, and societal acceptance. These factors focus on the human element of robotic technology, ensuring that development and implementation are aligned with social needs, ethical standards, and user well-being.
In summary, best practices in robotics are typically multifaceted, balancing technical excellence with fiscal responsibility and social responsiveness. The exact balance of these considerations would depend on the specific goals and context of the robotic technology being developed or implemented.
In conclusion, the best practices for developing and implementing robotic technologies encompass various aspects, including a systematic approach to design and evaluation, understanding the concept of robot living space, prioritizing human-centric design and interaction, adhering to industry standards, addressing risk assessment comprehensively, and learning from industry leaders. By following these best practices, professionals can enhance their understanding of robotics, apply lessons learned, and develop effective robotic systems across diverse applications and contexts. Table 9 contains a summarized presentation of responses to the fifth research question.
Table 9.
Best practices for developing and implementing robotic technologies.
4.3.6. How Can Existing Robotic Technology Be Improved to Better Meet the Demands of the Future?
As the demands of the future evolve and industries continue to embrace the potential of robotic technology, there is a growing need to enhance existing capabilities to meet the challenges ahead. In this section, we explore avenues for improving current robotic technology to ensure its continued relevance and effectiveness in the future.
To better meet the demands of the future, existing robotic technology can be improved by focusing on enhancing social interaction capabilities, as highlighted by [48]. This can be achieved via advancements in speech recognition, incorporating ML algorithms to recognize and adapt to different accents, dialects, and languages. Improving the accuracy and naturalness of robotic speech, along with integrating other modalities such as gesture, facial expressions, and tactile sensing, can contribute to more effective and immersive human–robot interactions.
Another aspect of improvement can be integrating advanced artificial intelligence technologies and enhancing collaboration and interaction between humans and robots [49]. The integration of artificial intelligence technologies, such as computer vision, natural language processing (NLP), and deep learning (DL), can enhance the perception, decision-making, and performance capabilities of intelligent robots. Furthermore, investing in the development of intelligent robots that integrate with emerging technologies is crucial. Countries around the world, including the United States, European countries, Japan, and South Korea, have formulated national strategies to advance their robotics industries. These strategies emphasize integrating robots with computer technology, big data, networking, and artificial intelligence to foster innovation in the field.
Existing robotic technology in the field of surgery can be improved to meet future demands via several key avenues [79]. Firstly, focusing on specific features of robotic arms, instruments, consoles, and video technology is essential. Additionally, addressing issues related to clinical applicability and cost-effectiveness is crucial. Visual enhancements, such as incorporating 3D vision technology, can provide surgeons with improved depth perception. Exploring emerging technologies, such as haptic feedback, eye-tracking systems, and autonomous robots, also holds potential for further enhancing surgical efficiency and accuracy [80].
To improve existing robotic technology and meet future demands in the construction industry, several key factors need to be considered. These factors include addressing construction costs, increasing governmental support, scaling up prefabrication, addressing economic, social, and environmental factors, and enhancing the performance and usability of construction robots [81].
Addressing the challenges posed by the COVID-19 pandemic and other infectious diseases, the integration of robotics and AI in surgery can provide physical separation between surgeons and patients, reducing infection transmission risks [80]. Improving haptic feedback, developing transparent control architectures, and incorporating AI and telepresence capabilities are crucial.
Furthermore, to improve existing robotic technology, research should focus on several key areas, such as the development of swarm robotics, hardware miniaturization, heterogeneity, simulation tools, design methodologies, machine learning, security, and human–swarm interaction [82]. Addressing these areas will enable existing robotic technology to become more adaptable, robust, and capable of solving complex coordination problems in various application domains.
In summary, the future of robotics technology presents challenges related to costs, energy consumption, and computational limitations [83]. Improvements in artificial intelligence, ML, modular robotics, and environmental and alternately powered robots can enhance existing robotic technology. By pursuing these avenues, researchers and industry leaders can drive innovation and develop more efficient and sustainable robotic technologies.
Existing robotic technology can also be enhanced by addressing several key challenges, including improving uncertainty estimation in deep learning systems, incorporating incremental and class-incremental learning techniques, and leveraging temporal and spatial embodiment [84]. By addressing these challenges and developing novel solutions, existing robotic technology can be advanced to meet the evolving demands of the future. The findings related to the sixth research question are concisely presented in Table 10.
Table 10.
Improvements for robotic technology to meet future demands.
5. Taxonomy of Intelligent Robots
In this section, a taxonomy is constructed from the systematic literature review’s findings, focusing exclusively on specific groups of intelligent robots identified via our targeted research questions. This taxonomy is deliberately confined to cover only those categories of intelligent robots that align with the research objectives of this paper, acknowledging that a myriad of other robot categories exist but are beyond the scope of this particular study. It is important to highlight that the majority of robots discussed here are designed for versatile applications. They can be programmed and tailored to fit various usage contexts, allowing them to fit into multiple categories that constitute the introduced taxonomy. The proposed taxonomy aims to succinctly outline representatives from each robot category, highlighting their strengths and weaknesses and offering guidance for their future development and research.
5.1. Industrial Robots
Industrial robots are primarily designed to perform a wide range of tasks in industrial settings, revolutionizing manufacturing and automation processes. They are characterized by their precision, strength, and reliability [22,41,57,58,61,77]. Industrial robots are typically used for tasks such as welding, assembly, material handling, and quality control in industrial environments. The applications of industrial robots are widespread in manufacturing industries. They play a pivotal role in increasing production efficiency, reducing production costs, and ensuring consistent product quality. Industrial robots are used in automotive manufacturing, electronics assembly, and even in pharmaceutical production lines. Within the category of industrial robots, a variety of specific types can be identified, each distinguished by its unique applications and functionalities. This includes smart manufacturing robots, known for their integration in advanced production environments; welding robots, specialized in performing precise and consistent welding tasks; and collaborative robots, designed to work alongside human workers safely and effectively.
5.1.1. Smart Manufacturing Robots
As an integral component of the Industry 4.0 revolution, smart manufacturing robots represent a significant leap in the field of industrial automation [88]. These robots are characterized by their ability to operate autonomously within a smart factory environment, where they are interconnected and communicate with other systems using IoT technologies. Their primary attributes include advanced sensor integration, adaptive learning capabilities, and the ability to make data-driven decisions [57,58].
The distinctive features of smart manufacturing robots include their high degree of flexibility, precision, and efficiency. They are often equipped with sophisticated sensors that enable them to perceive their surroundings, adapt to new tasks, and optimize their actions based on real-time data. For example, a robot in an automotive assembly line can adjust its operations based on the specific model being assembled, ensuring precision and customization in manufacturing. Notable examples of smart manufacturing robots are the KUKA KR AGILUS and the Yaskawa Motoman GP families of industrial robots.
The KUKA KR AGILUS is a family of compact and agile industrial robots designed for smart manufacturing applications. These robots are known for their speed and precision, making them suitable for tasks that require high levels of accuracy. The KR AGILUS robots are equipped with integrated safety features, including collision detection and force control, allowing them to collaborate with humans safely [89]. They excel in applications such as small parts assembly, machine tending, and packaging. The KUKA KR AGILUS robots find applications in industries like electronics, pharmaceuticals, and food processing. They are often used for tasks that involve handling delicate components or performing repetitive actions with consistency [90]. For instance, in electronics manufacturing, these robots can precisely place microchips onto circuit boards, contributing to the production of high-quality electronic devices.
The Yaskawa Motoman GP Series consists of industrial robots designed to deliver high-speed and high-precision performance in manufacturing environments. These robots are built with a robust and durable design, making them reliable even in challenging industrial settings [91]. The GP Series offers various models, each with different payload and reach capacities, allowing manufacturers to choose the robot that best suits their application. Yaskawa provides multiple controller options for programming and controlling these robots, making integration into existing automation systems seamless [92]. The Yaskawa Motoman GP Series robots are widely used in manufacturing processes that demand precision and efficiency. In the automotive industry, they are employed for tasks like spot welding and painting, where their high-speed movements ensure faster cycle times. In the electronics industry, these robots are used for tasks such as assembling small components with precision. Food processing industries utilize them for packaging and material handling operations. The flexibility and reliability of the GP Series robots contribute to increased productivity and reduced labor costs in various manufacturing sectors.
Smart manufacturing robots find their applications across various sectors, particularly in industries that require high levels of precision and customization. Their ability to rapidly adapt to different manufacturing tasks makes them invaluable in sectors like automotive, electronics, and aerospace manufacturing. The main advantages of these robots include increased productivity, reduced human error, and the ability to perform tasks that are hazardous or ergonomically challenging for human workers.
Despite their numerous advantages, smart manufacturing robots also face certain limitations. One of the primary challenges is the high initial cost of installation and integration into existing manufacturing systems. Additionally, there is a need for skilled personnel to manage and maintain these advanced robotic systems. Another challenge is the potential job displacement in industries where robots can perform tasks previously carried out by humans.
For future improvements, research should focus on enhancing the cognitive capabilities of these robots, allowing them to handle more complex decision-making processes. This could involve integrating advanced AI algorithms that enable robots to learn and adapt more efficiently. Another area for improvement is the development of more robust and flexible robotic systems that can easily be reconfigured for different tasks. Future research directions could include exploring ways to reduce the cost of these systems, making them more accessible to small- and medium-sized enterprises. Research could also delve into the ethical and social implications of deploying smart manufacturing robots, particularly in relation to workforce displacement and job retraining programs.
5.1.2. Welding Robots
As a specialized subset of industrial automation, welding robots have transformed the landscape of manufacturing by offering unparalleled precision and efficiency in welding processes. Their evolution is a testament to the advancements in robotic technology, aligning with the needs of modern manufacturing practices. These robots bring forth a blend of precision, consistency, and safety to welding tasks [50].
Welding robots are distinguished by their precision and ability to perform repetitive tasks with high accuracy. They are typically equipped with advanced control systems and welding tools, allowing them to execute complex welding tasks that are challenging for human welders. For instance, in automotive manufacturing, these robots are used to perform spot welding on car frames, ensuring uniform quality and strength of the welds. Significant representatives of this category include the Fanuc Arc Mate 120iC and the ABB IRB 6700-235/3.2 welding robots.
The Fanuc Arc Mate 120iC is a versatile welding robot known for its precision and speed in arc welding applications. It features a six-axis robotic arm that provides flexibility in reaching various welding positions. Equipped with advanced welding technology, this robot offers high-quality welds with consistent accuracy. It can handle various welding processes, including MIG (Metal Inert Gas) welding, TIG (Tungsten Inert Gas) welding, and spot welding [93]. The Arc Mate 120iC is also designed with safety features, such as collision detection, to ensure safe operation in industrial settings [94]. This welding robot is commonly used in automotive manufacturing, aerospace, and general metal fabrication industries. It excels in tasks like welding car body components, aircraft parts, and structural steel. Its speed and precision contribute to increased production efficiency and improved weld quality.
The ABB IRB 6700-235/3.2 is a heavy-duty welding robot designed for industrial applications that require high payloads and extended reach. It is equipped with a large working envelope and a robust structure, making it suitable for demanding welding tasks. This robot utilizes advanced arc welding technology to achieve consistent and high-quality welds in various materials, including steel and aluminum. It features an intuitive programming interface that allows for quick setup and customization of welding parameters [95]. The ABB IRB 6700-235/3.2 is commonly used in the shipbuilding, construction, and heavy equipment manufacturing industries. It excels in welding large structures, such as ship hulls, bridges, and heavy machinery components. Its ability to handle heavy payloads and cover a wide range of welding positions makes it indispensable in these industries, where precision and durability are essential [96].
The primary application of welding robots is in industries where high-quality welding is essential, such as automotive, aerospace, and shipbuilding. Their benefits are multifaceted, encompassing increased productivity, consistent weld quality, reduction in waste, and improved worker safety by minimizing human exposure to hazardous welding environments.
Despite their advantages, welding robots face certain challenges. One significant limitation is the need for precise programming and setup, which requires skilled technicians. Additionally, their effectiveness is sometimes limited to specific types of welding tasks, and they may not be as flexible in adapting to different welding scenarios. The initial investment and maintenance costs are also considerations for many businesses.
Future enhancements for welding robots could involve integrating more advanced sensors and machine learning algorithms. These improvements would allow the robots to adapt their welding techniques in real time, handling a wider variety of materials and joint configurations. Additionally, research into more user-friendly programming interfaces could broaden their applicability, making them accessible to a larger pool of users. In terms of research, there is potential in exploring collaborative welding robots that work alongside human welders, combining the precision of robotic welding with the nuanced skills of a human operator. Research could also focus on developing modular and more affordable welding robots to cater to smaller manufacturing units.
5.1.3. Collaborative Robots
Collaborative robots, commonly known as cobots, represent a paradigm shift in the field of robotics, emphasizing interaction and cooperation with human workers. Cobots are designed to work alongside humans in a shared workspace, differing significantly from traditional industrial robots in their operational approach and design philosophy [23,41,61,77].
Cobots are characterized by their safety features, user-friendliness, and flexibility. Unlike traditional robots that require safety barriers, cobots are equipped with sensors and safety mechanisms that allow them to detect and respond to the presence of humans, reducing the risk of injury [97]. For example, in automotive assembly lines, cobots can assist workers by handling and positioning heavy parts, thereby reducing physical strain on human workers.
The Universal Robots UR5e is a popular collaborative robot designed for smart manufacturing environments. It features a lightweight and compact design, making it easy to deploy alongside human workers. The UR5e is equipped with advanced sensors and vision systems, allowing it to adapt to dynamic production processes. It can perform tasks such as pick-and-place operations, assembly, and quality control [98]. What sets the UR5e apart is its ability to be easily reprogrammed to handle different tasks, making it a versatile solution for smart manufacturing. The UR5e is used in a wide range of industries, including electronics, automotive, and consumer goods manufacturing. It can work alongside human operators to improve efficiency and productivity. For example, it can assist in assembling electronics components, inspecting products for defects, handling materials in a flexible and adaptive manner, and cultivating a patina finish on shoe surfaces [99].
Sawyer is a collaborative robot developed by Rethink Robotics. It is designed with a human-like arm and a highly intuitive interface, making it easy for non-experts to set up and operate. Sawyer is known for its precision and flexibility, making it suitable for industries like automotive, aerospace, and consumer goods. It has advanced vision capabilities, enabling it to identify and handle objects with precision. Sawyer is also equipped with safety features, such as collision detection and force limiting, to ensure safe collaboration with humans [100]. It is used in applications like precision assembly, quality control, and machine tending [101]. Its ability to work alongside human workers in close proximity allows it to perform tasks that require dexterity and precision. By automating these tasks, Sawyer improves product quality and reduces the risk of repetitive strain injuries for human workers.
The ABB YuMi is a dual-arm collaborative robot designed specifically for small parts assembly in smart manufacturing environments. It features two highly flexible arms with integrated sensors, cameras, and advanced control systems. What distinguishes YuMi is its human-like dexterity, allowing it to handle intricate tasks such as assembling delicate electronic components, sorting small items, and performing fine-tuned quality inspections [102]. YuMi is designed to work safely alongside human operators, enhancing the efficiency of assembly lines. ABB YuMi is widely used in industries such as electronics, consumer goods, and pharmaceuticals. It excels in applications where precision and dexterity are critical, such as assembling miniature electronic devices, packaging small products, and conducting quality checks with a high degree of accuracy [103].
Cobots are versatile and can be found in various industries, including manufacturing, healthcare, and service sectors. Their main advantages include enhancing human productivity, improving ergonomic conditions, and offering greater flexibility in production lines. Cobots are particularly beneficial in tasks that require both the precision of a robot and the cognitive skills of a human, such as in complex assembly tasks or in handling delicate objects.
Despite their numerous benefits, cobots face challenges, particularly in terms of their payload capacity and speed, which are typically lower compared to traditional industrial robots. This limitation makes them less suitable for tasks requiring high-speed operations or handling very heavy loads. Additionally, integrating cobots into existing workflows can require significant planning and adjustments.
Future enhancements for cobots may involve advancing their AI and ML capabilities, enabling them to learn from and adapt to human actions more effectively. Improvements in sensor technology could also allow for more sophisticated and safer interactions between humans and robots. Research should focus on developing more intuitive interfaces for cobots to make them easier to program and operate by workers without specialized training. Additionally, exploring the integration of cobots in sectors beyond manufacturing, such as agriculture or logistics, could open new avenues for their application.
5.2. Service Robots
Service robots are designed to interact with and assist humans in a variety of settings, offering valuable services and enhancing the quality of life [21,22,42]. They are characterized by their ability to perform tasks in both structured and unstructured environments, often with the aim of aiding or augmenting human capabilities. The applications of service robots are diverse and widespread, encompassing a range of sectors and functionalities. Within the group of service robots, notable categories include hospitality service robots, which are used in the hospitality industry for various customer service tasks; healthcare and assistive robots, designed to assist with medical care and support for individuals with disabilities or health needs, educational robots, which facilitate learning and engagement in educational ecosystem, humanoid social robots, known for their human-like interactions and social engagement capabilities, and robotic food delivery systems, which automate the process of delivering food in various settings.
5.2.1. Hospitality Service Robots
Hospitality service robots have emerged as a transformative element in the tourism sector. These robots are designed to enhance customer service experiences in hotels, airports, and other hospitality settings [21,60]. Their introduction reflects the industry’s growing inclination toward automation and personalized guest services.
These robots are characterized by their interactive capabilities, often equipped with speech recognition and AI-driven communication systems. They can perform various customer service tasks, such as greeting guests, providing information, and assisting with check-ins and check-outs. A notable example is the deployment of robotic receptionists in hotels, capable of handling basic guest inquiries and facilitating a smooth check-in process.
The Savioke Relay Robot is a popular hospitality service robot designed to assist hotel staff in delivering items to guest rooms. It resembles a sleek, autonomous robot with a compartment for carrying items such as towels, toiletries, and room service orders. Guests or hotel staff can request services via a smartphone app or the hotel’s internal system. The Relay Robot then navigates the hotel’s corridors and elevators independently, reaching the designated room and autonomously calling the guest for delivery confirmation. The Savioke Relay Robot is widely used in hotels to enhance guest experience and improve operational efficiency [104]. It reduces the workload on hotel staff by handling routine tasks like delivering amenities, allowing human staff to focus on more personalized services. Guests appreciate the novelty of interacting with a robot during their stay, making it a unique and memorable feature of the hotel experience [105].
Connie, Hilton Hotels’ innovative robotic concierge, is a compact humanoid robot designed to enhance guest experiences via interactive assistance. Developed in collaboration with IBM and powered by their AI software Watson, Connie stands out with its advanced language processing capabilities, enabling it to respond naturally to guest inquiries [106]. Housed in a 58 cm tall android body created by Aldebaran, Connie is stationed near the hotel reception, where it assists guests by providing information about hotel amenities, local attractions, and dining options. The robot continuously learns from and adapts to guest interactions, refining its recommendations and responses, thanks to a database from the travel platform WayBlazer [107]. Connie’s introduction marks a significant step in the hospitality industry’s embrace of AI and robotics, offering guests a unique interactive experience while enhancing operational efficiency in hotels. This robotic concierge represents the evolving landscape of human–machine interaction in the hospitality sector, combining cognitive computing with intuitive skills to deliver a memorable service.
The primary application of hospitality service robots is to enhance the guest experience via efficient and novel service delivery. They can handle routine tasks, allowing human staff to focus on more complex guest needs. The benefits include reduced wait times for guests, consistent service delivery, and the novelty factor that can enhance the overall guest experience.
One of the main challenges in deploying hospitality service robots is the need to balance automated services with the personal touch traditionally associated with the hospitality industry. There is also the issue of guest acceptance, as some guests may prefer human interaction over interacting with a robot. Additionally, the initial cost and maintenance of these robots can be significant.
Future enhancements could focus on improving the AI and ML algorithms of these robots to enable more nuanced and context-aware interactions with guests. Enhancing their ability to understand and respond to a broader range of languages and dialects could also be beneficial. Research should explore the long-term impacts of robot integration on guest satisfaction and employee roles within the hospitality sector. Studies could also investigate the optimal balance between automated and human services to maximize guest satisfaction.
5.2.2. Healthcare and Assistive Robots
Healthcare and assistive robots have become increasingly significant in the medical and healthcare sectors [42,43,44,47,56,80]. These robots are designed to aid, perform medical procedures, and improve the overall quality of care in healthcare settings. Their integration reflects an ongoing trend toward technological innovation in patient care and assistance.
These robots are characterized by their ability to perform tasks with precision and consistency. They range from surgical robots, which assist doctors in performing complex procedures with high precision, to assistive robots that aid in patient care, such as handling and moving patients or even providing companionship and rehabilitation support. For instance, surgical robots in [43] have been employed to enhance patient care with minimally invasive procedures, offering more accuracy and shorter recovery times.
The Da Vinci Surgical System is an advanced robotic surgical platform developed by Intuitive Surgical. It is designed to assist surgeons in performing minimally invasive surgeries with enhanced precision and control. The system consists of robotic arms equipped with surgical instruments and a high-definition 3D camera. Surgeons operate the system from a console, where their hand movements are translated into precise robotic actions inside the patient’s body. The Da Vinci System is used in various surgical procedures, including prostatectomies, cardiac surgeries, and gynecological surgeries [108]. The Da Vinci Surgical System has revolutionized minimally invasive surgery by providing surgeons with improved dexterity and visualization. It offers several benefits, including smaller incisions, reduced pain, shorter hospital stays, and faster recovery times for patients. This robot is used in hospitals and medical centers worldwide to perform complex surgical procedures more effectively and with fewer complications [109].
Paro is a therapeutic robot designed to provide emotional support and companionship, primarily in healthcare settings such as nursing homes and hospitals. It resembles a cute baby harp seal and is equipped with sensors that allow it to respond to touch, sound, and light. Paro can make sounds, move its flippers, and express emotions via its LED-lit eyes. It is programmed to recognize and respond to the voices and touches of individuals, providing comfort and companionship to patients, especially those suffering from dementia or loneliness [110]. Paro has found applications in healthcare facilities, particularly for patients who may benefit from the emotional and psychological support it offers. Studies have shown that interactions with Paro can reduce stress, anxiety, and agitation in patients with dementia and other cognitive impairments [111]. It serves as a non-pharmacological intervention to improve the well-being of individuals in healthcare settings.
The primary applications of healthcare and assistive robots include surgical assistance, patient care, rehabilitation, and elderly care. They offer several advantages, such as reducing the physical strain on healthcare workers, increasing the precision of medical procedures, and providing support and independence to patients, particularly the elderly and those with disabilities.
Despite their benefits, these robots face challenges, including the high cost of development and implementation and the need for extensive training for healthcare professionals to use them effectively. There is also a concern about the potential reduction in human interaction with patients, which is a crucial aspect of patient care. Furthermore, ethical considerations arise regarding patient privacy and the decision-making process in medical care involving robots.
Future advancements could involve enhancing the robots’ AI capabilities to provide more personalized care and adapt to different patient needs. Improvements in robotic mobility and dexterity would also expand their applicability in various healthcare scenarios. Research should focus on exploring the long-term impacts of these robots on patient outcomes and healthcare workflows. Studies on patient and healthcare worker perceptions of these robots would provide valuable insights into their integration into healthcare settings. Additionally, addressing ethical and privacy concerns related to robot-assisted care is crucial for their wider acceptance.
5.2.3. Educational Robots
Educational robots are increasingly being integrated into learning environments, heralding a new era in educational methodologies [63,66]. These robots are not just tools for instruction but also facilitators of interactive and engaging learning experiences, particularly in science, technology, engineering, and mathematics (STEM) education.
Educational robots are characterized by their interactive and engaging nature. They are often designed to be user-friendly and appealing to students, fostering an environment conducive to learning and exploration. Examples include programmable robots used in coding classes, which allow students to learn programming concepts via hands-on experience, and robots that simulate scientific phenomena, providing a tangible way for students to understand abstract concepts.
Lego Mindstorms is an educational robotics platform developed by the LEGO Group. It is designed to teach robotics and programming concepts to students and enthusiasts of all ages. The platform includes a variety of sensors, motors, and Lego Technic components that users can assemble into robots. These robots can be programmed using a visual programming language, making them accessible to beginners [112]. Users can create robots capable of various tasks, such as line following, obstacle avoidance, and more complex challenges. Lego Mindstorms is widely used in educational institutions and robotics clubs to introduce students to robotics and Science, Technology, Engineering, and Mathematics (STEM) concepts [113]. It provides hands-on learning experiences, encouraging creativity and problem-solving skills. Students can build and program robots to solve real-world challenges, making it a valuable tool for teaching STEM subjects.
The Nao robot, developed by SoftBank Robotics, is a humanoid educational robot. Nao stands at approximately 58 cm tall and has a humanoid appearance with expressive eyes and a wide range of physical movements. It is equipped with various sensors, including cameras, microphones, and tactile sensors, as well as a touchscreen interface to interact with its environment and users. Nao can be programmed using various programming languages, including Python and Choregraphe, a visual programming tool [114]. It is designed to engage students in interactive and educational activities, including programming, storytelling, and language learning. Nao is used in schools, universities, and research institutions for educational purposes. It helps students learn programming, robotics, and various academic subjects via interactive lessons and activities. Nao’s humanoid form and expressive features make it engaging and relatable for students, enhancing their learning experience in a wide range of disciplines [115].
The primary application of educational robots is to enhance the teaching and learning process. They are particularly effective in subjects where practical, hands-on experience is beneficial, such as robotics, programming, and mathematics. These robots make learning more interactive and enjoyable, which can improve student engagement and the retention of information. They also offer opportunities for personalized learning, catering to the varied learning paces and styles of students.
Despite their potential, the integration of educational robots into classrooms faces several challenges. The cost of these robots can be a barrier for many educational institutions. Additionally, there is a need for teacher training and curriculum development to effectively integrate these robots into existing educational frameworks. Another challenge is ensuring equitable access to these technologies for all students.
Future enhancements for educational robots could involve the integration of more advanced AI to provide adaptive learning experiences tailored to individual student needs. Improving the durability and affordability of these robots will also be key to their wider adoption in educational settings. Research should focus on evaluating the effectiveness of educational robots in improving learning outcomes. Studies could explore how these robots can be used to bridge educational gaps and support students with different learning needs. Additionally, exploring the long-term impacts of robot-assisted learning on students’ educational trajectories and interest in STEM fields would be valuable.
5.2.4. Humanoid Social Robots
Humanoid social robots have begun to play a pivotal role in various public and social settings, marking a significant advancement in human–robot interaction [48,52,67]. These robots, designed with human-like features and capabilities, are crafted to engage with people in a range of social environments, from public libraries to customer service centers.
Characterized by their human-like appearance and interactive capabilities, humanoid social robots are equipped with advanced communication technologies, including speech recognition and natural language processing. This enables them to engage in basic conversations, provide information, and assist users in navigating services. An example includes humanoid robots deployed in libraries, where they assist visitors with locating books or providing information about library services.
Pepper is a popular humanoid social robot developed by SoftBank Robotics. It is designed to interact with humans in a social and engaging manner. Pepper stands at a height of approximately 120 cm and possesses a humanoid form characterized by a white body and prominent expressive eyes. It is equipped with an array of sensors, including cameras, microphones, and other sensory apparatus, which enable it to detect and react to human gestures, facial expressions, and spoken language [116]. Pepper’s software is designed to understand and generate natural language, allowing it to hold conversations and provide information. Pepper is used in various settings, including retail stores, banks, and healthcare facilities. In retail, Pepper can greet customers, provide product information, and even entertain with dances and games. In healthcare, it can assist with patient engagement and emotional support. Its ability to engage and interact with people makes it a valuable addition to environments where human–robot interaction is desired [117].
Advanced Step in Innovative Mobility (ASIMO) is a humanoid robot developed by Honda. While ASIMO’s primary focus is on mobility and physical interaction, it has also been used for social interactions. ASIMO is a bipedal robot with a human-like appearance, standing around 130 cm tall. It can walk, run, climb stairs, and perform tasks that require fine motor skills [118]. ASIMO is equipped with sensors and cameras for navigation and interaction. ASIMO has been used for demonstrations and educational purposes to showcase advancements in humanoid robotics. It has appeared in museums, events, and educational institutions to inspire and educate people about robotics and technology [119]. Although Honda discontinued production of the ASIMO robot in early 2022, its development has contributed to the field of humanoid robotics.
The primary application of these robots is to enhance user experience in public and social environments. They are particularly beneficial in settings where human-like interaction is valuable but where human resources are limited or where repetitive information dissemination is required. The advantages of humanoid social robots include consistent customer service, the ability to operate without fatigue, and the novelty factor that can attract and engage users.
One of the main challenges facing humanoid social robots is the uncanny valley phenomenon, where robots that appear almost human can elicit discomfort in individuals. Additionally, these robots currently have limited emotional intelligence and may struggle with complex or nuanced human interactions. There is also the challenge of ensuring these robots can operate effectively in diverse and unpredictable human environments.
Future advancements could include enhancing the emotional intelligence of humanoid social robots, allowing for more natural and empathetic interactions with users. Improvements in mobility and adaptability would also enable these robots to function more effectively in varied social settings. Research should focus on understanding the long-term effects of interaction with humanoid social robots, particularly in terms of user acceptance and satisfaction. Studies could also explore the optimal balance between robotic and human staff in public service environments to ensure a harmonious and effective user experience.
5.2.5. Robotic Food Delivery Systems
Robotic food delivery systems are at the forefront of revolutionizing the food service and delivery industry [56]. By integrating advanced robotics and automation, these systems offer an innovative approach to handling and delivering food orders, streamlining the process with efficiency and precision.
Robotic food delivery systems are characterized by their automated capabilities in processing, handling, and delivering food orders. These systems often incorporate various technologies, including navigation systems, mobile connectivity, and AI, to ensure accurate and timely delivery. For example, in urban settings, autonomous delivery robots can navigate sidewalks and streets to deliver meals directly to customers’ doorsteps, offering a contactless and convenient service.
Delivery robots, such as those developed by Starship Technologies, are mobile logistic robots designed for last-mile delivery [120]. These robots are compact and autonomous, capable of navigating sidewalks and streets to deliver packages, groceries, or food orders to customers’ doorsteps. They are equipped with cameras and sensors for obstacle avoidance and are controlled remotely or autonomously via pre-mapped routes. Some delivery robots are designed to interact with customers for secure delivery drop-offs. These robots are employed by various companies for local deliveries, including food delivery services, grocery stores, and courier companies. They offer benefits such as reduced delivery times, lower delivery costs, and the ability to operate around the clock [121].
Food delivery drones, like those developed as part of Uber Eats’ Elevate program, represent a cutting-edge approach to food delivery [122]. These drones are equipped with rotors and advanced flight control systems. Customers place their food orders as usual, but instead of a ground-based vehicle, a drone is dispatched to transport the food. The drone can fly directly to the customer’s location, avoiding traffic and road obstacles. Once the drone reaches its destination, it lowers the food to the ground using a winch system, allowing the customer to collect their order. Food delivery drones are being explored in urban areas to overcome traffic congestion and provide ultra-fast food delivery [123]. They are particularly valuable for delivering food to hard-to-reach or congested locations, and they have the potential to reduce delivery times significantly.
The primary application of these robotic systems is in the food service industry, particularly in quick-service restaurants and food delivery services. The advantages include reduced delivery times, lower operational costs, and the ability to provide contactless service, which has become increasingly important for health and safety reasons. These systems also offer scalability, enabling businesses to handle a high volume of orders efficiently.
Despite their benefits, robotic food delivery systems face several challenges. One major issue is navigating complex urban environments safely and efficiently, which requires advanced technology and continuous updates. There are also regulatory and logistical challenges in implementing these systems on a wide scale, including compliance with traffic laws and ensuring the safety of pedestrians. Additionally, the initial investment for these systems can be substantial.
Future enhancements should focus on improving the AI and ML algorithms for better navigation and obstacle avoidance in diverse environments. Developing more compact and energy-efficient models could also expand their usability in different settings. Research should explore the societal and economic impacts of the widespread adoption of robotic food delivery systems, including their effects on employment in the delivery sector. Studies could also investigate consumer acceptance and trust in these systems, as well as their environmental impact compared to traditional delivery methods.
5.3. Logistics and Automation Robots
Logistics and automation robots streamline logistics and supply chain processes, playing a crucial role in the efficiency of warehouse operations and e-commerce logistics [59,72]. They are characterized by their efficiency, adaptability, and ability to handle repetitive tasks autonomously. Within the group of logistics and automation robots, there are key categories such as mobile logistic robots and automated order fulfillment systems. Mobile logistic robots are designed to optimize the efficiency of transporting goods within logistics and warehouse environments. Automated order fulfillment systems, on the other hand, streamline the process of picking, packing, and shipping orders, significantly enhancing the speed and accuracy of order processing in various sectors.
5.3.1. Mobile Logistic Robots
Mobile logistic robots have emerged as a pivotal component of modern logistics and warehousing operations [59]. These versatile robots play a critical role in automating the movement of goods within various industrial settings, significantly enhancing efficiency and productivity.
Mobile logistic robots are distinguished by their ability to autonomously navigate within dynamic environments, transport goods, and perform tasks such as picking, packing, and transporting. They are equipped with advanced sensors and computer vision systems and often employ artificial intelligence for decision making. Examples include Autonomous Guided Vehicles (AGVs) and Autonomous Mobile Robots (AMRs) used in warehouses, factories, and distribution centers.
Autonomous Guided Vehicles (AGVs) are a type of mobile robot designed for material transport within warehouses and industrial facilities. They are equipped with sensors, navigation systems, and predefined paths or magnetic tape guides that enable them to navigate and transport goods safely. AGVs come in various configurations, including forklift-style, tugger, and pallet trucks, depending on the specific application [124]. AGVs are commonly used in warehouse and manufacturing environments for tasks such as moving materials, transporting goods between storage and production areas, and replenishing inventory. They follow predetermined routes and can be programmed to perform repetitive tasks efficiently. AGVs contribute to reducing the need for manual labor in material handling, increasing the overall efficiency of operations, and ensuring the safe and consistent movement of goods [125].
Autonomous Mobile Robots (AMRs) are robotic systems designed for material transport and logistics tasks within warehouse settings. Unlike AGVs, AMRs do not rely on fixed paths or magnetic tape guides. Instead, they use advanced sensors, cameras, and navigation algorithms to navigate dynamically through the warehouse environment. AMRs are highly flexible and can adapt to changing layouts and obstacles. AMRs play a crucial role in modern warehouses and distribution centers. They are used for various tasks, including order picking, goods transport, and inventory management. AMRs can work collaboratively with human operators, enhancing the productivity of warehouse operations. For example, in the case of Locus Robotics, their AMRs are known for working alongside human pickers to increase picking efficiency [126]. AMRs can optimize routes, avoid obstacles, and seamlessly integrate into existing warehouse management systems. They contribute to reducing labor costs, improving order accuracy, and streamlining warehouse logistics [127].
The primary applications of mobile logistic robots are in logistics, warehousing, and material handling. They excel in tasks such as inventory management, order fulfillment, and transporting goods between different sections of a facility. The advantages of these robots include increased operational efficiency, reduced labor costs, and improved safety, as they can handle repetitive and physically demanding tasks.
Mobile logistic robots face challenges related to navigation in complex and dynamic environments. Ensuring collision avoidance, adapting to changing layouts, and coordinating with human workers are ongoing challenges. Additionally, the initial setup and integration of these robots into existing systems can be time-consuming and costly.
Future research should focus on developing more robust and adaptive navigation algorithms that can handle diverse warehouse layouts and dynamic environments. Collaborative robotic systems that seamlessly work alongside human employees need further refinement. Researchers should also explore the potential of swarm robotics for improved coordination and efficiency in large-scale logistics operations. Investigations into the economic benefits of implementing mobile logistic robots should be conducted to assess their long-term cost-effectiveness. Additionally, sustainability aspects, such as energy efficiency and environmental impact, should be explored to align with growing environmental concerns.
5.3.2. Automated Order Fulfillment Systems
Automated order fulfillment systems represent a pivotal advancement in modern supply chain management and e-commerce. These systems are designed to streamline the order fulfillment process, ensuring accuracy, speed, and efficiency [59].
Automated order fulfillment systems are characterized by their ability to automate the entire order processing workflow. They encompass a range of technologies, including conveyor systems, robotic pickers, automated storage and retrieval systems (AS/RS), and advanced software for order management. Examples of these include goods-to-person systems, shuttle systems, and robotic picking systems.
Automated warehouse robot systems, such as those offered by Kiva Systems (now part of Amazon Robotics), are designed to streamline the order fulfillment process in e-commerce and distribution centers [128]. These systems employ a fleet of autonomous robots that navigate through the warehouse to retrieve products stored on mobile shelves. The robots can move in any direction and work collaboratively to bring the required items to human workers stationed at packing stations. This reduces the need for manual labor in locating and transporting products, making the order fulfillment process faster and more efficient [129]. These systems are extensively used by e-commerce giants and logistics companies to handle a high volume of customer orders efficiently. They have revolutionized the warehousing industry by improving inventory management and order accuracy while reducing labor costs.
Automated order fulfillment systems are also applied in the healthcare sector, particularly in pharmacies. The Parata Max is an example of a robotic system used for filling prescription orders. This system automates the dispensing and packaging of medications by accurately counting pills, verifying prescriptions, and labeling containers [130]. Pharmacists can load prescription orders into the system, and the robot takes care of the rest. It ensures precision in medication dispensing, reduces errors, and increases the efficiency of pharmacy operations. These systems are utilized in retail pharmacies, hospitals, and healthcare facilities to improve the speed and accuracy of prescription filling [131]. They enhance patient safety by minimizing the risk of medication errors and allow pharmacy staff to focus on counseling patients and providing clinical services.
The primary application of automated order fulfillment systems is in e-commerce, retail, and distribution centers. These systems excel in picking, packing, and shipping customer orders with minimal human intervention. The advantages of these systems include rapid order processing, reduced error rates, improved inventory management, and the ability to handle high order volumes, especially during peak seasons.
Automated order fulfillment systems face challenges related to initial setup costs and integration with existing warehouse infrastructure. Ensuring seamless communication and coordination between different components of the system can be complex. Additionally, maintenance and system downtime can disrupt operations if not managed effectively.
Future research should focus on developing more flexible and scalable automated order fulfillment systems that can adapt to changing product types and order profiles. Integration with emerging technologies like AI and the IoT can further enhance system intelligence and decision making. Efforts should be directed toward improving the energy efficiency and sustainability of these systems, aligning with the growing emphasis on environmentally friendly practices. Research should also explore the potential of predictive analytics to forecast order volumes and optimize system performance.
5.4. Agricultural Robots
Agricultural robots represent a transformative force in modern agriculture. These robots are engineered to enhance farming processes, increase productivity, and address the challenges faced by the agricultural industry [22,51].
Agricultural robots exhibit a diverse range of characteristics and functionalities. They encompass autonomous tractors, robotic harvesters, precision weed control robots, and drones for crop monitoring. Examples include the John Deere See & Spray™ technology for targeted herbicide application and the Agrobot for harvesting fruits.
John Deere’s See & Spray is an innovative agricultural robot designed for precision farming. It combines computer vision and artificial intelligence to precisely apply herbicides to weeds while sparing crops [132]. The robot uses cameras and sensors to identify weeds in real time as it moves through the fields. It then sprays herbicides only on the detected weeds, reducing the amount of chemicals used and minimizing environmental impact. See & Spray is used in agriculture to improve crop yield and reduce the use of herbicides. By targeting weeds with precision, it helps farmers increase the efficiency of weed control while minimizing the cost of chemicals and potential harm to the environment [133].
Harvesting robots are designed to automate the process of picking fruits and vegetables in agricultural fields. An example is the Agrobot, which is equipped with advanced computer vision and robotic arms [3]. These robots can identify ripe produce with precision and gently harvest them without causing damage. They are designed to work in various weather conditions and can adapt to different crops. Harvesting robots like Agrobot significantly reduce labor costs and improve harvesting efficiency in the agriculture industry. These robots are commonly used in fruit orchards and vegetable fields, where the delicate handling of produce is essential [134]. They help farmers overcome labor shortages during peak harvest seasons and ensure the timely and efficient collection of crops.
These robots are used in modern agriculture to enhance crop yields, reduce resource consumption, and promote sustainable farming practices. They can be deployed in a variety of crop types, including corn, soybeans, and cotton, to improve crop health and productivity.
The primary application of agricultural robots is in farming and agriculture. They are employed in tasks such as planting, harvesting, weeding, pest control, and data collection. These robots offer several advantages, including increased efficiency, reduced labor costs, enhanced crop yield, and the ability to work in adverse weather conditions.
Agricultural robots face challenges related to high initial costs, compatibility with various crop types, and the need for specialized training to operate and maintain them. Issues of data privacy and cybersecurity in autonomous farming operations also need to be addressed.
Future research in agricultural robots should focus on developing robots that are more accessible to small-scale farmers, addressing the cost barrier. Additionally, efforts should be directed toward improving the adaptability of these robots to different crops and farming practices. Integration with artificial intelligence and ML algorithms can enable robots to make real-time decisions based on sensor data, optimizing farming processes. Research should also explore the potential of swarm robotics for collaborative tasks in agriculture. Furthermore, there is a growing need for sustainable and eco-friendly agricultural practices. Research should aim to reduce the environmental footprint of these robots, explore renewable energy sources, and minimize chemical usage via precise targeting.
5.5. Construction and Monitoring Robots
The realm of construction and monitoring robots represents a transformative domain within the construction and civil engineering sectors. These robots are purpose-built to augment construction processes, improve safety, and provide efficient monitoring of construction projects [29,54,72,81].
Construction and monitoring robots encompass a diverse array of characteristics and functionalities. They include autonomous bricklaying robots, concrete 3D printers, drones for site surveying, and remote monitoring robots. Notable examples include the Hadrian X construction robot and the Built Robotics’ autonomous construction equipment.
The Hadrian X construction robot is developed by Fastbrick Robotics (FBR). It is designed to automate the process of bricklaying and construction of buildings. The Hadrian X robot is equipped with a massive robotic arm that can place bricks with precision. What sets it apart is its ability to work autonomously and build entire structures, including walls, in a highly efficient manner. It uses Computer-Aided Design (CAD) data to determine the placement of bricks and can adapt to various designs [135]. The Hadrian X robot is revolutionizing the construction industry by automating the bricklaying process for entire buildings. It is capable of constructing structures quickly and accurately, reducing labor costs, and expediting construction timelines [136]. This robot has the potential to address labor shortages in the construction sector while maintaining high-quality construction standards.
Built Robotics is a company that specializes in retrofitting traditional construction equipment, such as excavators and bulldozers, with autonomous technology. These autonomous construction robots are equipped with sensors, GPS, and ML algorithms [137]. They can perform tasks like excavation, grading, and trenching with high precision and minimal human intervention [138]. Operators can monitor and control these robots remotely, ensuring safety and efficiency on construction sites. These robots are designed to work alongside human construction workers, augmenting their capabilities and reducing the risk of accidents. Built Robotics’ autonomous construction equipment is used in various construction projects, including residential and commercial development, infrastructure construction, and mining. They enhance productivity, reduce labor costs, and contribute to safer construction sites.
The principal application of construction and monitoring robots is within the construction industry, where they contribute to tasks such as bricklaying, concrete pouring, site inspection, and progress monitoring. These robots offer several advantages, including increased construction speed, enhanced precision, reduced labor costs, and improved worker safety.
Construction and monitoring robots face challenges pertaining to high initial costs, adaptability to diverse construction environments, and the need for specialized training to operate and maintain them. Ensuring the safety of these robots alongside human workers is a critical concern.
Future research in construction and monitoring robots should focus on reducing the cost of adoption, making these technologies more accessible to a wider range of construction projects. Enhanced adaptability to various construction scenarios and the development of intuitive user interfaces for operation are paramount. The integration of artificial intelligence and computer vision technologies can empower these robots to perform complex tasks with minimal human intervention, such as identifying structural defects or monitoring construction progress in real time. Research endeavors should continue to explore the potential of swarm robotics for collaborative construction tasks. Furthermore, the construction industry is progressively embracing sustainable practices. Research in this domain should aim to develop eco-friendly construction robots, incorporate renewable energy sources for powering these robots, and promote the recycling of construction materials.
5.6. Surveillance and Security Robots
The domain of surveillance and security robots represents a crucial component of modern security infrastructure. These robots are engineered to enhance surveillance, safeguard critical assets, and bolster security measures across various contexts [19,55].
Surveillance and security robots exhibit diverse features and capabilities, including autonomous patrolling, real-time video streaming, facial recognition, and intrusion detection. Examples encompass the Knightscope K5, a patrolling robot, and the Boston Dynamics Spot, known for its agility and adaptability in security applications.
The Knightscope K5 is a widely recognized security robot used for patrolling and monitoring large areas, such as shopping malls, corporate campuses, and parking lots [139]. It stands approximately 164 cm tall and is equipped with an array of sensors, cameras, and communication devices. These sensors allow it to detect unusual activity, such as intruders or security breaches and immediately notify human security personnel. The K5 can navigate autonomously, avoiding obstacles and mapping its environment in real time. It provides a visible security presence, acts as a deterrent to potential threats, and enhances the overall security of the monitored area. The Knightscope K5 is employed in various industries, including commercial real estate, manufacturing facilities, and data centers, to enhance security and reduce the need for constant human patrolling. It can provide valuable data and alerts to security teams, helping them respond quickly to security incidents [140].
Cobalt Robotics specializes in advanced security robots designed for surveillance in indoor environments like corporate offices, healthcare facilities, and data centers. These robots are autonomous, user-friendly in height, and equipped with a variety of sensors, cameras, and communication devices. Their capabilities include navigating autonomously through indoor spaces, detecting and reporting environmental anomalies such as unsecured doors or safety hazards, and relaying this information to human security analysts [141]. The robots are adept at patrolling, avoiding obstacles, and dynamically mapping their surroundings, which enhances their coverage and effectiveness as a security tool. They also serve as a visible deterrent to potential security threats. The integration of these robots into existing security systems amplifies the efficiency of human security teams by reducing the need for constant manual monitoring. Utilizing machine learning, Cobalt’s robots adapt to their environment, improving their identification of normal activity patterns and flagging irregularities for timely human intervention [142]. This fusion of advanced technology with human oversight enhances overall security management in various industries.
The primary application of surveillance and security robots is in security operations, where they serve as force multipliers. These robots are deployed for patrolling large areas, monitoring critical infrastructure, and providing real-time data to security personnel. Their advantages include 24/7 vigilance, rapid response capabilities, and the ability to operate in hazardous or remote environments, reducing human risk.
Surveillance and security robots face challenges related to privacy concerns, as their extensive data collection capabilities raise questions about personal privacy and data security. Additionally, their cost of acquisition and maintenance can be substantial. Ensuring these robots are resistant to tampering and hacking is a critical challenge.
Future research in surveillance and security robots should address privacy concerns by implementing robust data anonymization and encryption protocols. Enhanced human–robot interaction interfaces, including natural language processing for communication with security personnel, should be a priority. Furthermore, research should focus on developing advanced sensing technologies, such as improved night vision and environmental hazard detection, to bolster the robots’ surveillance capabilities. The integration of ML algorithms for anomaly detection and predictive analytics can elevate their effectiveness in threat detection. To mitigate the risk of cyberattacks, research efforts should concentrate on enhancing the cybersecurity measures of these robots, including regular software updates and vulnerability assessments. Exploring swarm robotics for collaborative surveillance and response actions in critical scenarios is another promising avenue.
6. Implications and Future Work Directions
The vibrant landscape of intelligent robotic technology promises to revolutionize various industries and presents numerous opportunities for growth and innovation. This systematic literature review explored the impact of robotics and AI on current industry trends, examined existing challenges, identified applications, and assessed the risks and benefits of robotic technology. We provided key implications and future directions to support ongoing research, development, and implementation of intelligent robotic solutions.
In the manufacturing industry, the focus must be on reinforcing the integration of human skills with automated machines, enhancing human–robot collaboration, and leveraging cloud computing, IoT, big data analysis, and AI for smart manufacturing. As e-commerce logistics and automation systems continue to draw from robotics, pertinent challenges relating to cost, accuracy, and collaboration among stakeholders must be addressed to bridge potential gaps in efficiency and scalability.
The tourism sector has the potential to further benefit from the integration of robotics and AI technologies by improving customer experiences, service standards, and personalization [60]. Facial recognition, virtual reality, and other innovative technologies can herald a new era of unique, responsive, and tailored interactions with customers. Additionally, advancements in low-cost robots with computer vision and AI in precision agriculture can revolutionize crop management and introduce new methods for analyzing and addressing plant characteristics.
Ongoing research should also focus on overcoming challenges in areas like open-ended learning, object manipulation, human–robot interaction, and intelligent and collective robots. The development of tools and techniques to address these obstacles will drive progress in various domains, including computer-assisted medicine, educational robotics, and human–machine interaction [64]. Developing ethical frameworks, policy changes, and self-regulation will be essential for mitigating associated risks while maximizing benefits. It is necessary to further understand public perception, employee attitudes, and the impact of this technology on employment and social dynamics.
To improve software engineering practices, human-centric design and interaction remain critical. Advanced sensors, actuators, comprehensive risk assessments, adherence to industry standards, consideration of human affective responses, and learning from industry leaders should be prioritized. In addition, addressing challenges in perception and decision making, improving system architecture, developing testing and simulation processes, and incorporating maintenance practices are key aspects in refining existing robotic technology.
Developing robotic technology that is both ethically and ecologically sustainable is another crucial direction that must be pursued in order to address concerns related to energy consumption, waste disposal, and the environmental impact of robotics [83]. As robotics technology becomes more widespread, investing in long-term sustainability measures will help to ensure future generations can continue leveraging its benefits.
Advancements in communication technologies, such as 5G and beyond, will also play a crucial role in the future of intelligent robotics. Faster, more reliable connectivity will enable robots to make real-time decisions, share large datasets, and facilitate human–robot collaboration more efficiently. As communication technology continues to evolve, the potential applications and capabilities of robotic systems are expected to grow in parallel.
Robotics for disaster management and relief operations is another area that merits more attention. With advancements in robotic technology, partnering robots with first responders can facilitate timely interventions, reducing casualties and providing aid in hazardous or inaccessible environments. Developing and refining advanced search and rescue robots, decontamination robots, and robot-assisted rehabilitation technology will play a critical role in disaster response efforts and healthcare [19].
Finally, exploring the use of robotics for exploratory missions in extreme environments, such as outer space, deep-sea exploration, and hazardous industrial settings, presents yet another promising avenue for future research and development. Collaborative efforts between stakeholders, such as space agencies, research institutions, and private industries, will undoubtedly drive the creation of innovative robotic solutions designed specifically to operate under the most challenging conditions.
The results of this systematic literature review provide valuable insights for researchers, policymakers, and practitioners in the field of robotics. For researchers, this review identifies key areas in which research efforts should be focused, including improving human–robot interaction, advancing open-ended learning, and developing sustainable and ethical technology. Researchers can also draw upon the identified applications, risks, and benefits of robotic technology to inform their work and decision making.
Policymakers stand to gain significant insights from our findings, as well. Understanding the current landscape, challenges, and risks associated with the integration of robotics and AI into various sectors will enable the development of informed policies and regulations. By fostering a safe and ethical environment for the growth and implementation of robotic technology, policymakers can maximize the benefits of this technology while minimizing negative impacts on society, such as employment and social change concerns.
Practitioners, including industry professionals and business leaders, can also benefit from the knowledge gained in this research. Identifying emerging trends and challenges in the realm of robotics and AI will enable informed decision making regarding the adoption and integration of these technologies into existing infrastructure and operations. Furthermore, our review highlights the importance of collaborative efforts between stakeholders, making it clear that cooperation between research institutions, private industries, and governmental bodies is paramount for unlocking the full potential of intelligent robotic solutions.
The implications of this research are diverse, and future work directions can be pursued to further enhance and advance the field of robotics. Here are some key future work directions:
- Ethical considerations: The ethical implications of robotic technology are complex and multifaceted. Future research should continue to delve into the ethical considerations surrounding the use of robotics, including the development of ethical frameworks, addressing privacy concerns, and ensuring responsible and fair use.
- Human–robot collaboration: Exploring ways to improve human–robot collaboration will be crucial in various industries. Future research should focus on developing advanced algorithms and technologies that enable seamless and effective collaboration between humans and robots, emphasizing safety, reliability, and efficiency.
- Sustainability and environmental impact: As the field of robotics continues to grow, it is important to consider the environmental impact of these technologies. Future research should focus on developing sustainable robotic solutions, including energy-efficient designs, recyclable materials, and waste management strategies.
- Interdisciplinary research: The field of robotics encompasses various disciplines, including computer science, engineering, psychology, and social sciences. Future research should encourage interdisciplinary collaboration to address complex challenges and ensure a holistic approach to robotics development.
- User experience and acceptability: Understanding user perceptions, attitudes, and acceptance of robotic technology is crucial for successful implementation. Future research should focus on user-centered design and evaluation, incorporating user feedback and preferences to create robotic solutions that are intuitive, user-friendly, and meet the needs and expectations of end-users.
- Regulation and policy: With the rapid advancement of robotic technology, there is a need for effective regulation and policy frameworks. Future research should explore the legal and regulatory implications of robotics, including liability, safety standards, and privacy regulations, to ensure responsible and ethical use of these technologies.
- Integration of emerging technologies: The integration of robotic technology with emerging technologies such as artificial intelligence, machine learning, blockchain, and 5G can greatly enhance the capabilities and applications of robotics. Future research should focus on exploring the synergies between these technologies and developing novel approaches that leverage their combined potential.
- Education and training: As the field of robotics continues to expand, there will be a growing need for skilled professionals who can design, develop, and maintain robotic systems. Future research should focus on developing educational programs and training initiatives that equip individuals with the necessary skills and knowledge to thrive in the robotics industry.
By addressing these issues, the field of intelligent robotics can continue to evolve and innovate, unlocking new opportunities and addressing the challenges of tomorrow.
7. Conclusions
This systematic literature review provided insights into emerging technologies, trends, challenges, applications, risks, and benefits within the field of intelligent robotics. These technological innovations have led to significant improvements in efficiency, productivity, and customer experiences across various industries, including manufacturing, logistics, tourism, agriculture, healthcare, education, construction, and more. Furthermore, they are projected to play an even more transformative role in enhancing various aspects of human life and industries in the future.
In addition to these remarkable advancements, the industry still faces critical open research questions that need to be addressed to ensure the responsible and effective integration of robotic technology across various sectors. These questions encompass ethical concerns, public acceptance, environmental impact, collaboration, regulation, integration with emerging technologies, education and training, user-centered design, interdisciplinary collaboration, and social and employment implications.
Addressing these open research questions is a crucial step in ensuring the responsible and beneficial integration of intelligent robotics into various sectors. For instance, ethical concerns and public acceptance are essential in fostering trust and ensuring the responsible use of technology. Collaboration between humans and robots requires an understanding of the optimal methods for effective collaboration, ensuring that users understand how to use the technology and ensuring user-centered designs that meet different end-user needs. In regulating the use of robotic technology, policymakers need to understand the implications and develop frameworks that prioritize safety, liability, and privacy concerns. Finally, interdisciplinary collaboration is essential in addressing complex challenges and ensuring a holistic approach to developing robotic systems that benefit various sectors.
Despite the systematic approach employed in this literature review, some limitations were encountered that could have impacted the completeness of the findings. One limitation was the availability of relevant literature, which could have limited the scope and generalizability of the review. Moreover, the restriction to only studies published in the English language may have introduced language bias, potentially omitting other relevant studies published in other languages. The review’s time limitation is also worth noting, as conducting a comprehensive systematic literature review requires significant time and resources, and thus, newer studies that could have added value to the review were possibly missed. Future research could overcome these limitations by conducting more extensive reviews, incorporating a broader range of databases, and potentially including studies published in other languages.
Author Contributions
Conceptualization, J.T.L., M.D. and T.O.; methodology, J.T.L. and T.O.; validation, J.T.L., M.D. and T.O.; investigation, J.T.L., M.D. and T.O.; writing—original draft preparation, J.T.L. and M.D.; writing—review and editing, T.O.; visualization, J.T.L. and T.O.; supervision, T.O. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Matheson, E.; Minto, R.; Zampieri, E.G.G.; Faccio, M.; Rosati, G. Human–Robot Collaboration in Manufacturing Applications: A Review. Robotics 2019, 8, 100. [Google Scholar] [CrossRef]
- Vijayakuymar, G.; Suresh, B. Significance and Application of Robotics in the Healthcare and Medical Field. Trans. Biomed. Eng. Appl. Healthc. 2022, 3, 13–18. [Google Scholar] [CrossRef]
- Oliveira, L.F.P.; Moreira, A.P.; Silva, M.F. Advances in Agriculture Robotics: A State-of-the-Art Review and Challenges Ahead. Robotics 2021, 10, 52. [Google Scholar] [CrossRef]
- Lee, H.-Y.; Murray, C.C. Robotics in Order Picking: Evaluating Warehouse Layouts for Pick, Place, and Transport Vehicle Routing Systems. Int. J. Prod. Res. 2019, 57, 5821–5841. [Google Scholar] [CrossRef]
- Alatise, M.B.; Hancke, G.P. A Review on Challenges of Autonomous Mobile Robot and Sensor Fusion Methods. IEEE Access 2020, 8, 39830–39846. [Google Scholar] [CrossRef]
- Soori, M.; Arezoo, B.; Dastres, R. Artificial Intelligence, Machine Learning and Deep Learning in Advanced Robotics, a Review. Cogn. Robot. 2023, 3, 54–70. [Google Scholar] [CrossRef]
- Raj, M.; Seamans, R. Primer on Artificial Intelligence and Robotics. J. Organ. Des. 2019, 8, 11. [Google Scholar] [CrossRef]
- Mosavi, A.; Varkonyi-Koczy, A. Learning in Robotics. Int. J. Comput. Appl. 2017, 157, 975–8887. [Google Scholar] [CrossRef]
- Van Den Hoven Van Genderen, R. Privacy and Data Protection in the Age of Pervasive Technologies in AI and Robotics. Eur. Data Prot. Law Rev. 2017, 3, 338–352. [Google Scholar] [CrossRef]
- Elliott, D.; Soifer, E. AI Technologies, Privacy, and Security. Front. Artif. Intell. 2022, 5, 826737. [Google Scholar] [CrossRef] [PubMed]
- Chiacchio, F.; Petropoulos, G.; Pichler, D. The Impact of Industrial Robots on EU Employment and Wages: A Local Labour Market Approach; Bruegel Working Paper; Bruegel: Brussels, Belgium, 2018. [Google Scholar]
- Wu, C.-J.; Raghavendra, R.; Gupta, U.; Acun, B.; Ardalani, N.; Maeng, K.; Chang, G.; Behram, F.A.; Huang, J.; Bai, C.; et al. Sustainable AI: Environmental Implications, Challenges and Opportunities. arXiv 2021, arXiv:2111.00364. [Google Scholar]
- Kamran, S.; Farhat, I.; Talha Mahboob, A.; Gagandeep Kaur, A.; Liton, D.; Abdul Ghaffar, K.; Rimsha, I.; Irum, S.; Afifah, R. The Impact of Artificial Intelligence and Robotics on the Future Employment Opportunities. Trends Comput. Sci. Inf. Technol. 2020, 5, 50–54. [Google Scholar] [CrossRef]
- Salau, A.O.; Demilie, W.B.; Akindadelo, A.; Eneh, J. Artificial Intelligence Technologies: Applications, Threats, and Future Opportunities. In Proceedings of the ACI’22: Workshop on Advances in Computation Intelligence, Its Concepts & Applications at ISIC 2022, Savannah, GA, USA, 17–19 May 2022; pp. 265–273. [Google Scholar]
- Barfield, W. Liability for Autonomous and Artificially Intelligent Robots. Paladyn J. Behav. Robot. 2018, 9, 193–203. [Google Scholar] [CrossRef]
- Zhu, Q.; Rass, S.; Dieber, B.; Vilches, V.M. Cybersecurity in Robotics: Challenges, Quantitative Modeling, and Practice. Found. Trends® Robot. 2021, 9, 1–129. [Google Scholar] [CrossRef]
- Desai, A.; Qadeer, S.; Seshia, S.A. Programming Safe Robotics Systems: Challenges and Advances. In Leveraging Applications of Formal Methods, Verification and Validation. Verification, Proceedings of the 8th International Symposium, ISoLA 2018, Limassol, Cyprus, 5–9 November 2018; Margaria, T., Steffen, B., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 103–119. [Google Scholar]
- Robla-Gomez, S.; Becerra, V.M.; Llata, J.R.; Gonzalez-Sarabia, E.; Torre-Ferrero, C.; Perez-Oria, J. Working Together: A Review on Safe Human-Robot Collaboration in Industrial Environments. IEEE Access 2017, 5, 26754–26773. [Google Scholar] [CrossRef]
- Delmerico, J.; Mintchev, S.; Giusti, A.; Gromov, B.; Melo, K.; Horvat, T.; Cadena, C.; Hutter, M.; Ijspeert, A.; Floreano, D.; et al. The Current State and Future Outlook of Rescue Robotics. J. Field Robot. 2019, 36, 1171–1191. [Google Scholar] [CrossRef]
- He, W.; Li, Z.; Chen, C.L.P. A Survey of Human-Centered Intelligent Robots: Issues and Challenges. IEEE/CAA J. Autom. Sin. 2017, 4, 602–609. [Google Scholar] [CrossRef]
- Yang, J.; Chew, E. A Systematic Review for Service Humanoid Robotics Model in Hospitality. Int. J. Soc. Robot. 2021, 13, 1397–1410. [Google Scholar] [CrossRef]
- Lai, R.; Lin, W.; Wu, Y. Review of Research on the Key Technologies, Application Fields and Development Trends of Intelligent Robots. In Intelligent Robotics and Applications, Proceedings of the 11th International Conference, ICIRA 2018, Newcastle, NSW, Australia, 9–11 August 2018; Proceedings, Part II; Springer International Publishing: Cham, Switzerland, 2018; pp. 449–458. ISBN 978-3-319-97588-7. [Google Scholar]
- Semeraro, F.; Griffiths, A.; Cangelosi, A. Human–Robot Collaboration and Machine Learning: A Systematic Review of Recent Research. Robot. Comput.-Integr. Manuf. 2023, 79, 102432. [Google Scholar] [CrossRef]
- Gordon, J.-S.; Pasvenskiene, A. Human Rights for Robots? A Literature Review. AI Ethics 2021, 1, 579–591. [Google Scholar] [CrossRef]
- Huang, R.; Li, H.; Suomi, R.; Li, C.; Peltoniemi, T. Intelligent Physical Robots in Health Care: Systematic Literature Review. J. Med. Internet Res. 2023, 25, e39786. [Google Scholar] [CrossRef]
- Lee, I. Service Robots: A Systematic Literature Review. Electronics 2021, 10, 2658. [Google Scholar] [CrossRef]
- Hentout, A.; Aouache, M.; Maoudj, A.; Akli, I. Human–Robot Interaction in Industrial Collaborative Robotics: A Literature Review of the Decade 2008–2017. Adv. Robot. 2019, 33, 764–799. [Google Scholar] [CrossRef]
- Atman Uslu, N.; Yavuz, G.Ö.; Koçak Usluel, Y. A Systematic Review Study on Educational Robotics and Robots. Interact. Learn. Environ. 2023, 31, 5874–5898. [Google Scholar] [CrossRef]
- Halder, S.; Afsari, K. Robots in Inspection and Monitoring of Buildings and Infrastructure: A Systematic Review. Appl. Sci. 2023, 13, 2304. [Google Scholar] [CrossRef]
- Wang, B.; Hu, S.J.; Sun, L.; Freiheit, T. Intelligent Welding System Technologies: State-of-the-Art Review and Perspectives. J. Manuf. Syst. 2020, 56, 373–391. [Google Scholar] [CrossRef]
- Zhou, H.; Wang, X.; Au, W.; Kang, H.; Chen, C. Intelligent Robots for Fruit Harvesting: Recent Developments and Future Challenges. Precis. Agric. 2022, 23, 1856–1907. [Google Scholar] [CrossRef]
- Hossain, M. Autonomous Delivery Robots: A Literature Review. IEEE Eng. Manag. Rev. 2023, 51, 77–89. [Google Scholar] [CrossRef]
- Naneva, S.; Sarda Gou, M.; Webb, T.L.; Prescott, T.J. A Systematic Review of Attitudes, Anxiety, Acceptance, and Trust Towards Social Robots. Int. J. Soc. Robot. 2020, 12, 1179–1201. [Google Scholar] [CrossRef]
- Linnenluecke, M.K.; Marrone, M.; Singh, A.K. Conducting Systematic Literature Reviews and Bibliometric Analyses. Aust. J. Manag. 2020, 45, 175–194. [Google Scholar] [CrossRef]
- Gajdzik, B.; Grabowska, S.; Saniuk, S. A Theoretical Framework for Industry 4.0 and Its Implementation with Selected Practical Schedules. Energies 2021, 14, 940. [Google Scholar] [CrossRef]
- von Braun, J.; Archer, M.S.; Reichberg, G.M.; Sánchez Sorondo, M. AI, Robotics, and Humanity: Opportunities, Risks, and Implications for Ethics and Policy. In Robotics, AI, and Humanity: Science, Ethics, and Policy; von Braun, J., Archer, M.S., Reichberg, G.M., Sánchez Sorondo, M., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 1–13. ISBN 978-3-030-54173-6. [Google Scholar]
- Winfield, A. Ethical Standards in Robotics and AI. Nat. Electron. 2019, 2, 46. [Google Scholar] [CrossRef]
- Meyer, P.B. Episodes of Collective Invention. US Bureau of Labor Statistics, Office of Productivity and Technology, Working Paper No. 368. 2003, pp. 1–31. Available online: https://ssrn.com/abstract=466880 (accessed on 30 October 2023).
- Leal Ghezzi, T.; Campos Corleta, O. 30 Years of Robotic Surgery. World J. Surg. 2016, 40, 2550–2557. [Google Scholar] [CrossRef]
- Trujillo, D.; Holt, E. Barriers to Automation and Robotics in Construction. Series in Built Environment. In Proceedings of the Associated Schools of Construction—56th Annual International Conference, Merseyside, UK, 14–18 April 2020; Volume 1, pp. 257–265. [Google Scholar]
- Simões, A.C.; Pinto, A.; Santos, J.; Pinheiro, S.; Romero, D. Designing Human-Robot Collaboration (HRC) Workspaces in Industrial Settings: A Systematic Literature Review. J. Manuf. Syst. 2022, 62, 28–43. [Google Scholar] [CrossRef]
- Kasaei, S.H.; Melsen, J.; van Beers, F.; Steenkist, C.; Voncina, K. The State of Lifelong Learning in Service Robots. J. Intell. Robot. Syst. 2021, 103, 8. [Google Scholar] [CrossRef]
- Hoeckelmann, M.; Rudas, I.J.; Fiorini, P.; Kirchner, F.; Haidegger, T. Current Capabilities and Development Potential in Surgical Robotics. Int. J. Adv. Robot. Syst. 2015, 12, 61. [Google Scholar] [CrossRef]
- Wang, X.V.; Wang, L. A Literature Survey of the Robotic Technologies during the COVID-19 Pandemic. J. Manuf. Syst. 2021, 60, 823–836. [Google Scholar] [CrossRef]
- Polydoros, A.S.; Nalpantidis, L. Survey of Model-Based Reinforcement Learning: Applications on Robotics. J. Intell. Robot. Syst. 2017, 86, 153–173. [Google Scholar] [CrossRef]
- Lee, C.; Kim, M.; Kim, Y.J.; Hong, N.; Ryu, S.; Kim, H.J.; Kim, S. Soft Robot Review. Int. J. Control Autom. Syst. 2017, 15, 3–15. [Google Scholar] [CrossRef]
- Santhanaraj, K.K.; Ramya, M.M.; Dinakaran, D. A Survey of Assistive Robots and Systems for Elderly Care. J. Enabl. Technol. 2021, 15, 66–72. [Google Scholar] [CrossRef]
- Mahdi, H.; Akgun, S.A.; Saleh, S.; Dautenhahn, K. A Survey on the Design and Evolution of Social Robots—Past, Present and Future. Robot. Auton. Syst. 2022, 156, 104193. [Google Scholar] [CrossRef]
- Wang, T.-M.; Tao, Y.; Liu, H. Current Researches and Future Development Trend of Intelligent Robot: A Review. Int. J. Autom. Comput. 2018, 15, 525–546. [Google Scholar] [CrossRef]
- Shen, W.; Hu, T.; Zhang, C.; Ye, Y.; Li, Z. A Welding Task Data Model for Intelligent Process Planning of Robotic Welding. Robot. Comput.-Integr. Manuf. 2020, 64, 101934. [Google Scholar] [CrossRef]
- Vasconcelos, G.J.Q.; Costa, G.S.R.; Spina, T.V.; Pedrini, H. Low-Cost Robot for Agricultural Image Data Acquisition. Agriculture 2023, 13, 413. [Google Scholar] [CrossRef]
- Yang, X.; Dai, H.; Yi, X.; Wang, Y.; Yang, S.; Zhang, B.; Wang, Z.; Zhou, Y.; Peng, X. MicROS: A Morphable, Intelligent and Collective Robot Operating System. Robot. Biomim. 2016, 3, 21. [Google Scholar] [CrossRef]
- Boteanu, A.; Kent, D.; Mohseni-Kabir, A.; Rich, C.; Chernova, S. Towards Robot Adaptability in New Situations. In Proceedings of the 2015 AAAI Fall Symposium Series, Arlington, VA, USA, 12–14 November 2015; pp. 24–31. [Google Scholar]
- Chu, Y.; Wang, J. Application of Measuring Intelligent Robot in Building Deformation Monitoring. Procedia Comput. Sci. 2022, 208, 206–210. [Google Scholar] [CrossRef]
- Shin, M.S.; Kim, B.C.; Hwang, S.M.; Ko, M.C. Design and Implementation of IoT-Based Intelligent Surveillance Robot. Stud. Inform. Control 2016, 25, 422. [Google Scholar] [CrossRef]
- Di Nuovo, A.; Broz, F.; Wang, N.; Belpaeme, T.; Cangelosi, A.; Jones, R.; Esposito, R.; Cavallo, F.; Dario, P. The Multi-Modal Interface of Robot-Era Multi-Robot Services Tailored for the Elderly. Intell. Serv. Robot. 2018, 11, 109–126. [Google Scholar] [CrossRef]
- Day, C.-P. Robotics in Industry—Their Role in Intelligent Manufacturing. Engineering 2018, 4, 440–445. [Google Scholar] [CrossRef]
- Evjemo, L.D.; Gjerstad, T.; Grøtli, E.I.; Sziebig, G. Trends in Smart Manufacturing: Role of Humans and Industrial Robots in Smart Factories. Curr. Robot. Rep. 2020, 1, 35–41. [Google Scholar] [CrossRef]
- Huang, G.Q.; Chen, M.Z.Q.; Pan, J. Robotics in Ecommerce Logistics. HKIE Trans. 2015, 22, 68–77. [Google Scholar] [CrossRef]
- Samala, N.; Katkam, B.S.; Bellamkonda, R.S.; Rodriguez, R.V. Impact of AI and Robotics in the Tourism Sector: A Critical Insight. J. Tour. Futures 2020, 8, 73–87. [Google Scholar] [CrossRef]
- Gao, Z.; Wanyama, T.; Singh, I.; Gadhrri, A.; Schmidt, R. From Industry 4.0 to Robotics 4.0—A Conceptual Framework for Collaborative and Intelligent Robotic Systems. Procedia Manuf. 2020, 46, 591–599. [Google Scholar] [CrossRef]
- Nadikattu, A.K.R. Influence of Artificial Intelligence on Robotics Industry. Int. J. Creat. Res. Thoughts 2021, 9, 4708–4714. [Google Scholar]
- Chatzichristofis, S.A. Recent Advances in Educational Robotics. Electronics 2023, 12, 925. [Google Scholar] [CrossRef]
- Sheridan, T.B. Human–Robot Interaction: Status and Challenges. Hum. Factors 2016, 58, 525–532. [Google Scholar] [CrossRef]
- Ulhøi, J.P.; Nørskov, S. The Emergence of Social Robots: Adding Physicality and Agency to Technology. J. Eng. Technol. Manag. 2022, 65, 101703. [Google Scholar] [CrossRef]
- Zhong, B.; Xia, L. A Systematic Review on Exploring the Potential of Educational Robotics in Mathematics Education. Int. J. Sci. Math. Educ. 2020, 18, 79–101. [Google Scholar] [CrossRef]
- Tella, A.; Ajani, Y.A. Robots and Public Libraries. Libr. Hi Tech. News 2022, 39, 15–18. [Google Scholar] [CrossRef]
- Gordon, J.-S. What Do We Owe to Intelligent Robots? AI Soc. 2020, 35, 209–223. [Google Scholar] [CrossRef]
- Arduengo, M.; Sentis, L. The Robot Economy: Here It Comes. Int. J. Soc. Robot. 2021, 13, 937–947. [Google Scholar] [CrossRef]
- Majumdar, A.; Pavone, M. How Should a Robot Assess Risk? Towards an Axiomatic Theory of Risk in Robotics. In Robotics Research; Amato, N.M., Hager, G., Thomas, S., Torres-Torriti, M., Eds.; Springer International Publishing: Cham, Switzerland, 2020; Volume 10, pp. 75–84. [Google Scholar]
- Tussyadiah, I.P.; Zach, F.J.; Wang, J. Do Travelers Trust Intelligent Service Robots? Ann. Tour. Res. 2020, 81, 102886. [Google Scholar] [CrossRef]
- Bock, T. The Future of Construction Automation: Technological Disruption and the Upcoming Ubiquity of Robotics. Autom. Constr. 2015, 59, 113–121. [Google Scholar] [CrossRef]
- Osawa, H.; Ema, A.; Hattori, H.; Akiya, N.; Kanzaki, N.; Kubo, A.; Koyama, T.; Ichise, R. What Is Real Risk and Benefit on Work with Robots? From the Analysis of a Robot Hotel. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6 March 2017; pp. 241–242. [Google Scholar]
- Ivanov, S.H.; Webster, C. Adoption of Robots, Artificial Intelligence and Service Automation by Travel, Tourism and Hospitality Companies—A Cost-Benefit Analysis. In Proceedings of the International Scientific Conference “Contemporary Tourism—Traditions and Innovations”, Sofia, Bulgaria, 19–21 October 2017; St. Kliment Ohridski University Press: Sofia, Bulgaria, 2017. Available online: https://ssrn.com/abstract=3007577 (accessed on 30 October 2023).
- Cai, X.; Ning, H.; Dhelim, S.; Zhou, R.; Zhang, T.; Xu, Y.; Wan, Y. Robot and Its Living Space: A Roadmap for Robot Development Based on the View of Living Space. Digit. Commun. Netw. 2021, 7, 505–517. [Google Scholar] [CrossRef]
- Lee, K.; Shin, J.; Lim, J.-Y. Critical Hazard Factors in the Risk Assessments of Industrial Robots: Causal Analysis and Case Studies. Saf. Health Work 2021, 12, 496–504. [Google Scholar] [CrossRef] [PubMed]
- Franklin, C.S.; Dominguez, E.G.; Fryman, J.D.; Lewandowski, M.L. Collaborative Robotics: New Era of Human–Robot Cooperation in the Workplace. J. Saf. Res. 2020, 74, 153–160. [Google Scholar] [CrossRef] [PubMed]
- Lampi, A.; Venermo, K.; Salo, M.; Pirkkalainen, H. “It Is Better than Working with a Person”: Affective Cues and Responses to Robots at Work. In Proceedings of the 8th International Workshop on Socio-Technical Perspective in Information Systems Development (STPIS 2022), Reykjavik, Iceland, 19–20 August 2022; CEUR Workshop Proceedings. Bednar, P., Islind, A.S., Vallo-Hult, H., Nolte, A., Rajanen, M., Zaghloul, F., Ravarini, A., Braccini, A.M., Eds.; RWTH Aachen: Aachen, Germany, 2022; pp. 208–221. Available online: https://ceur-ws.org/Vol-3239/paper19.pdf (accessed on 30 October 2023).
- Rassweiler, J.J.; Autorino, R.; Klein, J.; Mottrie, A.; Goezen, A.S.; Stolzenburg, J.-U.; Rha, K.H.; Schurr, M.; Kaouk, J.; Patel, V.; et al. Future of Robotic Surgery in Urology. BJU Int. 2017, 120, 822–841. [Google Scholar] [CrossRef]
- Feizi, N.; Tavakoli, M.; Patel, R.V.; Atashzar, S.F. Robotics and AI for Teleoperation, Tele-Assessment, and Tele-Training for Surgery in the Era of COVID-19: Existing Challenges, and Future Vision. Front. Robot. AI 2021, 8, 610677. [Google Scholar] [CrossRef] [PubMed]
- Pan, M.; Linner, T.; Pan, W.; Cheng, H.; Bock, T. Influencing Factors of the Future Utilisation of Construction Robots for Buildings: A Hong Kong Perspective. J. Build. Eng. 2020, 30, 101220. [Google Scholar] [CrossRef]
- Dorigo, M.; Theraulaz, G.; Trianni, V. Swarm Robotics: Past, Present, and Future [Point of View]. Proc. IEEE 2021, 109, 1152–1165. [Google Scholar] [CrossRef]
- Pagliarini, L.; Lund, H.H. The Future of Robotics Technology. J. Robot. Netw. Artif. Life 2017, 3, 270. [Google Scholar] [CrossRef]
- Sünderhauf, N.; Brock, O.; Scheirer, W.; Hadsell, R.; Fox, D.; Leitner, J.; Upcroft, B.; Abbeel, P.; Burgard, W.; Milford, M.; et al. The Limits and Potentials of Deep Learning for Robotics. Int. J. Robot. Res. 2018, 37, 405–420. [Google Scholar] [CrossRef]
- Palmerini, E.; Bertolini, A.; Battaglia, F.; Koops, B.-J.; Carnevale, A.; Salvini, P. RoboLaw: Towards a European Framework for Robotics Regulation. Robot. Auton. Syst. 2016, 86, 78–85. [Google Scholar] [CrossRef]
- Bocchino, R.; Nordmann, A.; Thackston, A.; Angerer, A.; Ciccozzi, F.; Malavolta, I.; Wortmann, A. Industry Best Practices in Robotics Software Engineering. arXiv 2022. [Google Scholar] [CrossRef]
- ANSI/RIA R15.06-2012; Industrial Robots and Robot Systems—Safety Requirements. Robotic Industries Association: Ann Arbor, MI, USA, 2013.
- Goel, R.; Gupta, P. Robotics and Industry 4.0. In A Roadmap to Industry 4.0: Smart Production, Sharp Business and Sustainable Development; Nayyar, A., Kumar, A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 157–169. [Google Scholar]
- Shepherd, S.; Buchstab, A. KUKA Robots On-Site. In Robotic Fabrication in Architecture, Art and Design 2014; McGee, W., Ponce De Leon, M., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 373–380. [Google Scholar]
- Buchstab, A. KUKA: Innovations in Industrial Robotics. In Proceedings of the Rob|Arch 2012, Vienna, Austria, 17–18 December 2012; Brell-Çokcan, S., Braumann, J., Eds.; Springer: Vienna, Austria, 2013; pp. 267–274. [Google Scholar]
- Vitalli, R.A.P.; Moreira, J.M.L. Mathematical Modeling of Digital Twins and Industry 4.0 Technologies for Measuring Pipe Wall Thickness at Angra 1 Nuclear Power Plant. J. Artif. Intell. Mach. Learn. Data Sci. 2023, 1, 59–64. [Google Scholar] [CrossRef] [PubMed]
- Liu, A.; Callahan, J.; Gomez, E.; Milller, S.; Si, W. Applications of Machine Automation with Robotics and Computer Vision in Cleanroom Assemblies. In Proceedings of the 5th North American Particle Accelerator Conference 2022, Albuquerque, NM, USA, 7–12 August 2022; pp. 756–759. [Google Scholar] [CrossRef]
- Nobrega, G.; Souza, M.S.; Rodríguez-Martín, M.; Rodríguez-Gonzálvez, P.; Ribeiro, J. Parametric Optimization of the GMAW Welding Process in Thin Thickness of Austenitic Stainless Steel by Taguchi Method. Appl. Sci. 2021, 11, 8742. [Google Scholar] [CrossRef]
- Chalvin, M.; Campocasso, S.; Hugel, V.; Baizeau, T. Layer-by-Layer Generation of Optimized Joint Trajectory for Multi-Axis Robotized Additive Manufacturing of Parts of Revolution. Robot. Comput.-Integr. Manuf. 2020, 65, 101960. [Google Scholar] [CrossRef]
- Chen, R.; Zhou, C.; Cheng, L. Computer-Vision-Guided Semi-Autonomous Concrete Crack Repair for Infrastructure Maintenance Using a Robotic Arm. AI Civ. Eng. 2022, 1, 9. [Google Scholar] [CrossRef]
- Zhou, C.; Chen, R.; Xu, J.; Ding, L.; Luo, H.; Fan, J.; Chen, E.J.; Cai, L.; Tang, B. In-Situ Construction Method for Lunar Habitation: Chinese Super Mason. Autom. Constr. 2019, 104, 66–79. [Google Scholar] [CrossRef]
- Taesi, C.; Aggogeri, F.; Pellegrini, N. COBOT Applications—Recent Advances and Challenges. Robotics 2023, 12, 79. [Google Scholar] [CrossRef]
- Petzoldt, C.; Niermann, D.; Maack, E.; Sontopski, M.; Vur, B.; Freitag, M. Implementation and Evaluation of Dynamic Task Allocation for Human–Robot Collaboration in Assembly. Appl. Sci. 2022, 12, 12645. [Google Scholar] [CrossRef]
- González, A.; Perez-Vidal, C.; Borrell, J.; Solanes, J.E.; Gracia, L. Development of a Collaborative Robotic System to Polish Leather Surfaces. Int. J. Comput. Integr. Manuf. 2023, 1–19. [Google Scholar] [CrossRef]
- Bogue, R. Robots That Interact with Humans: A Review of Safety Technologies and Standards. Ind. Robot Int. J. 2017, 44, 395–400. [Google Scholar] [CrossRef]
- Bloss, R. Collaborative Robots Are Rapidly Providing Major Improvements in Productivity, Safety, Programing Ease, Portability and Cost While Addressing Many New Applications. Ind. Robot Int. J. 2016, 43, 463–468. [Google Scholar] [CrossRef]
- Liu, L.; Zou, Z.; Greene, R.L. The Effects of Type and Form of Collaborative Robots in Manufacturing on Trustworthiness, Risk Perceived, and Acceptance. Int. J. Hum.-Comput. Interact. 2023, 1–14. [Google Scholar] [CrossRef]
- Parigi Polverini, M.; Zanchettin, A.M.; Rocco, P. A Constraint-Based Programming Approach for Robotic Assembly Skills Implementation. Robot. Comput.-Integr. Manuf. 2019, 59, 69–81. [Google Scholar] [CrossRef]
- Huang, J.; Lau, T.; Cakmak, M. Design and Evaluation of a Rapid Programming System for Service Robots. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 295–302. [Google Scholar]
- Chung, M.J.-Y.; Cakmak, M. “How Was Your Stay?”: Exploring the Use of Robots for Gathering Customer Feedback in the Hospitality Industry. In Proceedings of the 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Nanjing, China, 27–31 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 947–954. [Google Scholar]
- Yang, L.; Henthorne, T.L.; George, B. Artificial Intelligence and Robotics Technology in the Hospitality Industry: Current Applications and Future Trends. In Digital Transformation in Business and Society; George, B., Paul, J., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 211–228. [Google Scholar]
- Tussyadiah, I.P.; Park, S. Consumer Evaluation of Hotel Service Robots. In Information and Communication Technologies in Tourism 2018; Stangl, B., Pesonen, J., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 308–320. [Google Scholar]
- D’Ettorre, C.; Mariani, A.; Stilli, A.; Rodriguez, Y.; Baena, F.; Valdastri, P.; Deguet, A.; Kazanzides, P.; Taylor, R.H.; Fischer, G.S.; et al. Accelerating Surgical Robotics Research: A Review of 10 Years with the Da Vinci Research Kit. IEEE Robot. Autom. Mag. 2021, 28, 56–78. [Google Scholar] [CrossRef]
- Fontanelli, G.A.; Ficuciello, F.; Villani, L.; Siciliano, B. Modelling and Identification of the Da Vinci Research Kit Robotic Arms. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1464–1469. [Google Scholar]
- Hung, L.; Liu, C.; Woldum, E.; Au-Yeung, A.; Berndt, A.; Wallsworth, C.; Horne, N.; Gregorio, M.; Mann, J.; Chaudhury, H. The Benefits of and Barriers to Using a Social Robot PARO in Care Settings: A Scoping Review. BMC Geriatr. 2019, 19, 232. [Google Scholar] [CrossRef]
- Kang, H.S.; Makimoto, K.; Konno, R.; Koh, I.S. Review of Outcome Measures in PARO Robot Intervention Studies for Dementia Care. Geriatr. Nurs. 2020, 41, 207–214. [Google Scholar] [CrossRef]
- Zygouris, N.C.; Striftou, A.; Dadaliaris, A.N.; Stamoulis, G.I.; Xenakis, A.C.; Vavougios, D. The Use of LEGO Mindstorms in Elementary Schools. In Proceedings of the 2017 IEEE Global Engineering Education Conference (EDUCON), Athens, Greece, 25–28 April 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 514–516. [Google Scholar]
- Afari, E.; Khine, M.S. Robotics as an Educational Tool: Impact of Lego Mindstorms. Int. J. Inf. Educ. Technol. 2017, 7, 437–442. [Google Scholar] [CrossRef]
- Subedi, A.; Pandey, D.; Mishra, D. Programming Nao as an Educational Agent: A Comparison Between Choregraphe and Python SDK. In Innovations in Smart Cities Applications Volume 5; Ben Ahmed, M., Boudhir, A.A., Karaș, İ.R., Jain, V., Mellouli, S., Eds.; Springer International Publishing: Cham, Switzerland, 2022; Volume 393, pp. 367–377. [Google Scholar]
- Younis, H.A.; Ruhaiyem, N.I.R.; Ghaban, W.; Gazem, N.A.; Nasser, M. A Systematic Literature Review on the Applications of Robots and Natural Language Processing in Education. Electronics 2023, 12, 2864. [Google Scholar] [CrossRef]
- Pandey, A.K.; Gelin, R. A Mass-Produced Sociable Humanoid Robot: Pepper: The First Machine of Its Kind. IEEE Robot. Autom. Mag. 2018, 25, 40–48. [Google Scholar] [CrossRef]
- Bechade, L.; Dubuisson-Duplessis, G.; Pittaro, G.; Garcia, M.; Devillers, L. Towards Metrics of Evaluation of Pepper Robot as a Social Companion for the Elderly. In Advanced Social Interaction with Agents; Eskenazi, M., Devillers, L., Mariani, J., Eds.; Springer International Publishing: Cham, Switzerland, 2019; Volume 510, pp. 89–101. [Google Scholar]
- Shigemi, S. ASIMO and Humanoid Robot Research at Honda. In Humanoid Robotics: A Reference; Goswami, A., Vadakkepat, P., Eds.; Springer: Dordrecht, The Netherlands, 2019; pp. 55–90. [Google Scholar]
- Germak, C.; Lupetti, M.L.; Giuliano, L.; Kaouk Ng, M.E. Robots and Cultural Heritage: New Museum Experiences. J. Sci. Technol. Arts 2015, 7, 47–57. [Google Scholar] [CrossRef]
- Hoffmann, T.; Prause, G. On the Regulatory Framework for Last-Mile Delivery Robots. Machines 2018, 6, 33. [Google Scholar] [CrossRef]
- Srinivas, S.; Ramachandiran, S.; Rajendran, S. Autonomous Robot-Driven Deliveries: A Review of Recent Developments and Future Directions. Transp. Res. Part E Logist. Transp. Rev. 2022, 165, 102834. [Google Scholar] [CrossRef]
- Carson, B. First Look: Uber Unveils New Design for Uber Eats Delivery Drone. Available online: https://www.forbes.com/sites/bizcarson/2019/10/28/first-look-uber-unveils-new-design-for-uber-eats-delivery-drone/ (accessed on 14 January 2024).
- Doole, M.; Ellerbroek, J.; Hoekstra, J. Estimation of Traffic Density from Drone-Based Delivery in Very Low Level Urban Airspace. J. Air Transp. Manag. 2020, 88, 101862. [Google Scholar] [CrossRef]
- Vlachos, I.; Pascazzi, R.M.; Ntotis, M.; Spanaki, K.; Despoudi, S.; Repoussis, P. Smart and Flexible Manufacturing Systems Using Autonomous Guided Vehicles (AGVs) and the Internet of Things (IoT). Int. J. Prod. Res. 2022, 1–22. [Google Scholar] [CrossRef]
- Thylén, N.; Wänström, C.; Hanson, R. Challenges in Introducing Automated Guided Vehicles in a Production Facility—Interactions between Human, Technology, and Organisation. Int. J. Prod. Res. 2023, 61, 7809–7829. [Google Scholar] [CrossRef]
- Azadeh, K.; Roy, D.; De Koster, R.; Khalilabadi, S.M.G. Zoning Strategies for Human–Robot Collaborative Picking. Decis. Sci. 2023, 1–21. [Google Scholar] [CrossRef]
- Grover, A.K.; Ashraf, M.H. Leveraging Autonomous Mobile Robots for Industry 4.0 Warehouses: A Multiple Case Study Analysis. Int. J. Logist. Manag. 2023. [Google Scholar] [CrossRef]
- Boysen, N.; De Koster, R.; Weidinger, F. Warehousing in the E-Commerce Era: A Survey. Eur. J. Oper. Res. 2019, 277, 396–411. [Google Scholar] [CrossRef]
- Azadeh, K.; De Koster, R.; Roy, D. Robotized and Automated Warehouse Systems: Review and Recent Developments. Transp. Sci. 2019, 53, 917–945. [Google Scholar] [CrossRef]
- Walsh, K.E.; Chui, M.A.; Kieser, M.A.; Williams, S.M.; Sutter, S.L.; Sutter, J.G. Exploring the Impact of an Automated Prescription-Filling Device on Community Pharmacy Technician Workflow. J. Am. Pharm. Assoc. 2011, 51, 613–618. [Google Scholar] [CrossRef] [PubMed]
- Truong, T.D.; Khuu, N.H.L.; Le, Q.D.; Vu, T.T.C.; Tran, H.B.; Vo, T.Q. A General Overview of Overhead Multi-Station Multi-Shuttle Systems and the Innovative Applications Trend in Vietnam. Appl. Sci. 2023, 13, 11036. [Google Scholar] [CrossRef]
- Ghaly, A.E.; Ibrahim, M.M. Mechanization of Weed Management in Sugar Beet. In Sugar Beet Cultivation, Management and Processing; Misra, V., Srivastava, S., Mall, A.K., Eds.; Springer Nature: Singapore, 2022; pp. 327–367. ISBN 9789811927294 9789811927300. [Google Scholar]
- Yeshe, A.; Gourkhede, P.; Vaidya, P. Blue River Technology: Futuristic Approach of Precision Farming. Just Agric. 2022, 2, 1–14. [Google Scholar]
- Kootstra, G.; Wang, X.; Blok, P.M.; Hemming, J.; Van Henten, E. Selective Harvesting Robotics: Current Research, Trends, and Future Directions. Curr. Robot. Rep. 2021, 2, 95–104. [Google Scholar] [CrossRef]
- Bogue, R. What Are the Prospects for Robots in the Construction Industry? Ind. Robot. Int. J. 2018, 45, 1–6. [Google Scholar] [CrossRef]
- Lojanica, V.; Colic-Damjanovic, V.-M.; Jankovic, N. Housing of the Future: Housing Design of the Fourth Industrial Revolution. In Proceedings of the 2018 5th International Symposium on Environment-Friendly Energies and Applications (EFEA), Rome, Italy, 24–26 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–4. [Google Scholar]
- Melenbrink, N.; Werfel, J.; Menges, A. On-Site Autonomous Construction Robots: Towards Unsupervised Building. Autom. Constr. 2020, 119, 103312. [Google Scholar] [CrossRef]
- Liang, C.-J.; Wang, X.; Kamat, V.R.; Menassa, C.C. Human–Robot Collaboration in Construction: Classification and Research Trends. J. Constr. Eng. Manag. 2021, 147, 03121006. [Google Scholar] [CrossRef]
- Marcu, G.; Lin, I.; Williams, B.; Robert, L.P.; Schaub, F. “Would I Feel More Secure with a Robot?”: Understanding Perceptions of Security Robots in Public Spaces. Proc. ACM Hum.-Comput. Interact. 2023, 7, 1–34. [Google Scholar] [CrossRef]
- Reid, M. Rethinking the Fourth Amendment in the Age of Supercomputers, Artificial Intelligence, and Robots. West Va. Law Rev. 2017, 119, 863–889. [Google Scholar]
- Simmons, R. Terry in the Age of Automated Police Officers. Seton Hall Law Rev. 2020, 50, 909–953. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, X.; Sathishkumar, V.E.; Sivakumar, V. Machine Learning Techniques Based on Security Management in Smart Cities Using Robots. Work 2021, 68, 891–902. [Google Scholar] [CrossRef] [PubMed]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).