A Staged Real-Time Ground Segmentation Algorithm of 3D LiDAR Point Cloud


Abstract
:1. Introduction
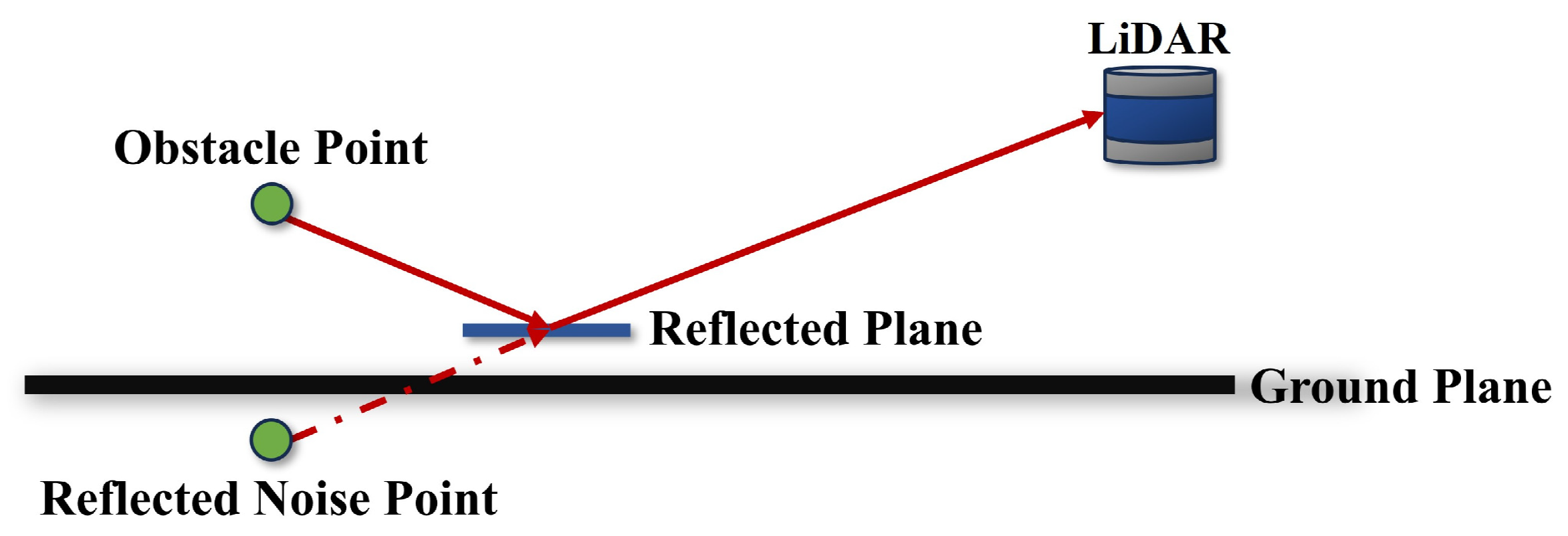
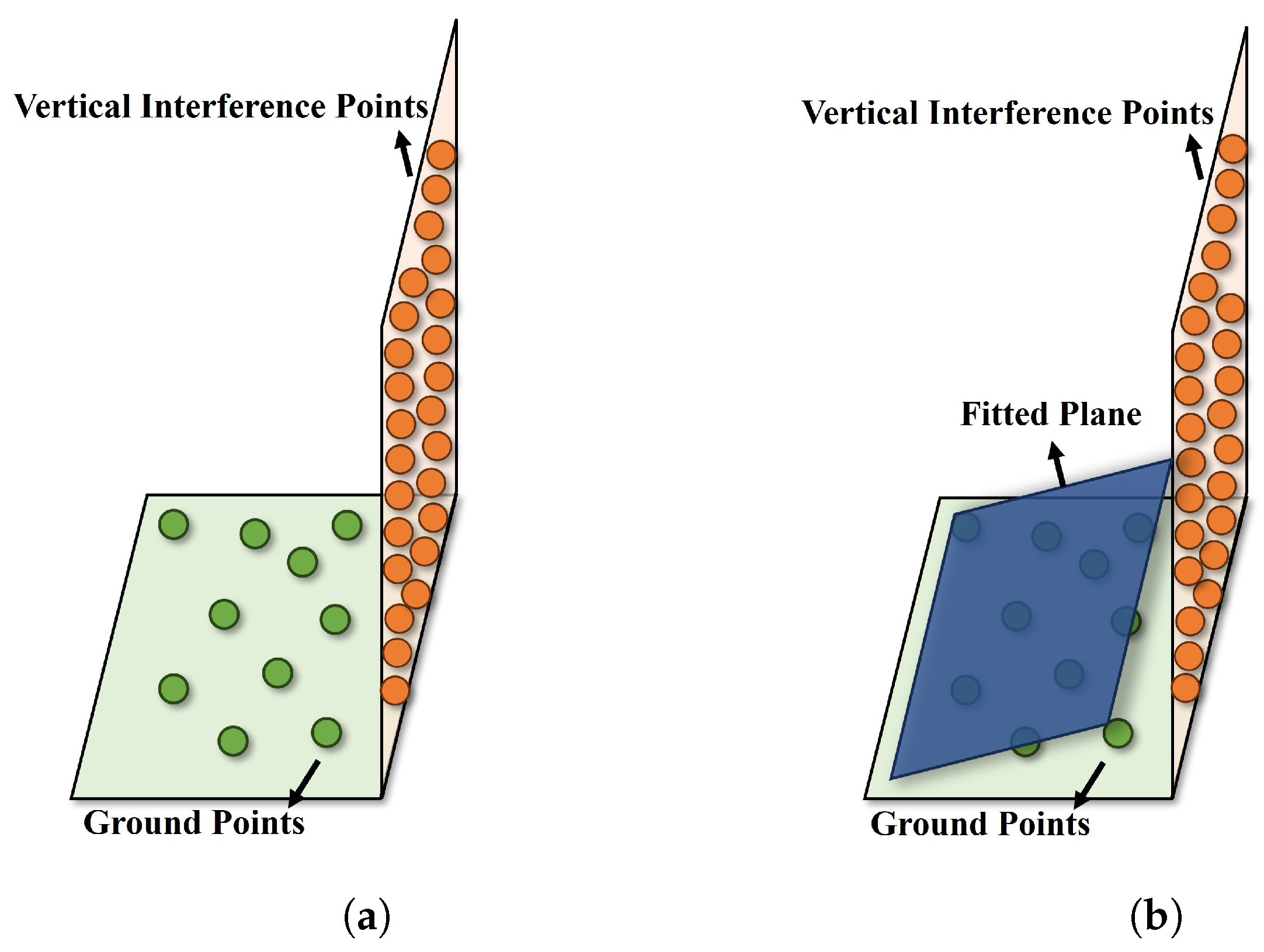
- First, in the first stage of interference point removal, two modules are designed: region-wise reflected noise removal and region-wise vertical interference removal. These modules effectively address the issue of non-ground points interfering with ground plane fitting.
- Second, in the second stage of ground plane fitting and ground point segmentation, this paper introduces novel criteria for assessing the validity of fitted planes and the region-wise invalid ground plane repair module. These address the issue of undersegmentation of ground points caused by failed ground plane fitting.
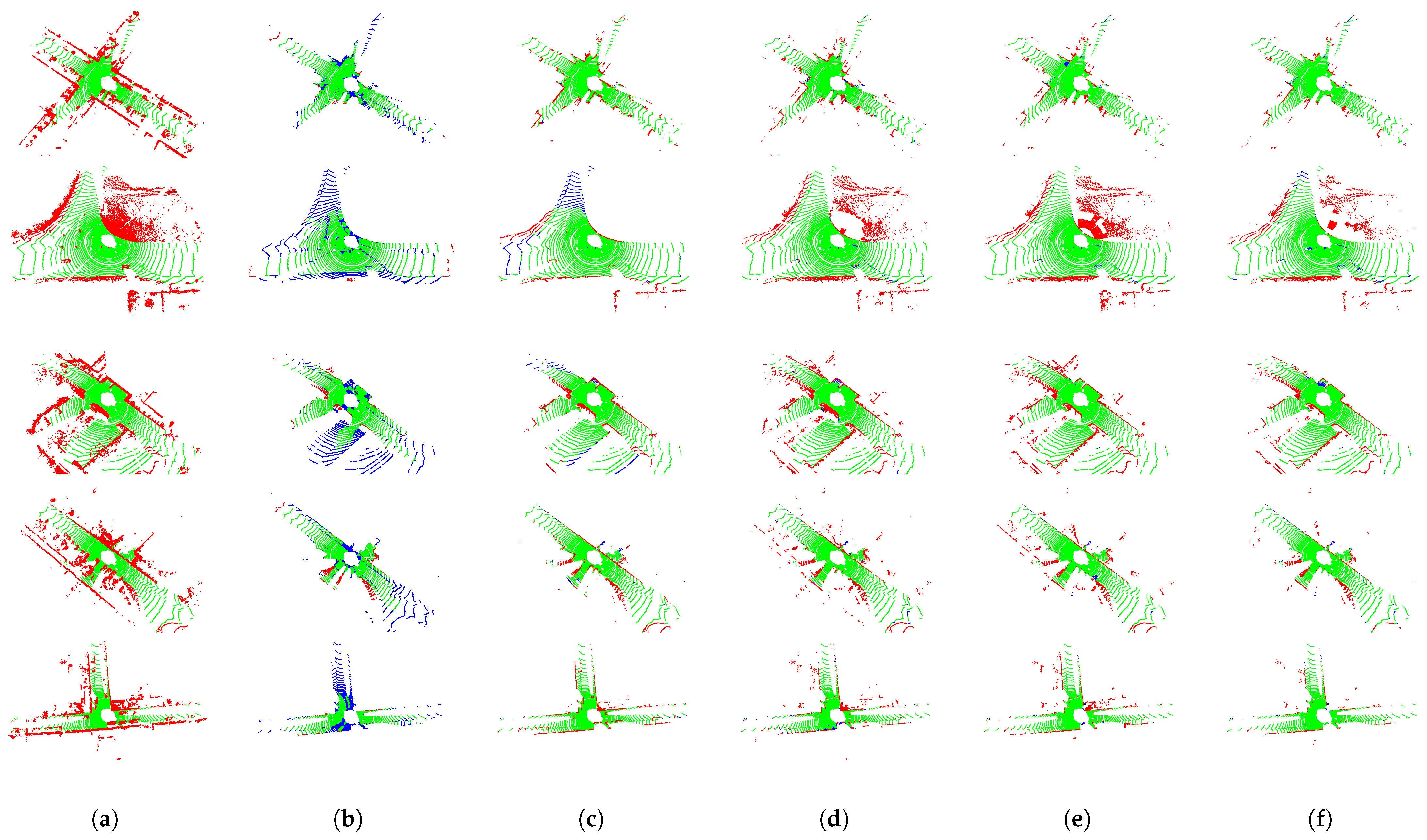
- Finally, the proposed algorithm is evaluated on the SemanticKITTI dataset [30]. The experimental results demonstrate that, compared to the existing methods, the proposed algorithm achieves the best segmentation results.
2. Related Work
2.1. 2.5D Grid-Based Method
2.2. Ground Modeling
2.3. Adjacent Points and Local Features
2.4. Higher-Order Inference
2.5. Learning-Based Method
3. Materials and Methods
3.1. Problem Definition
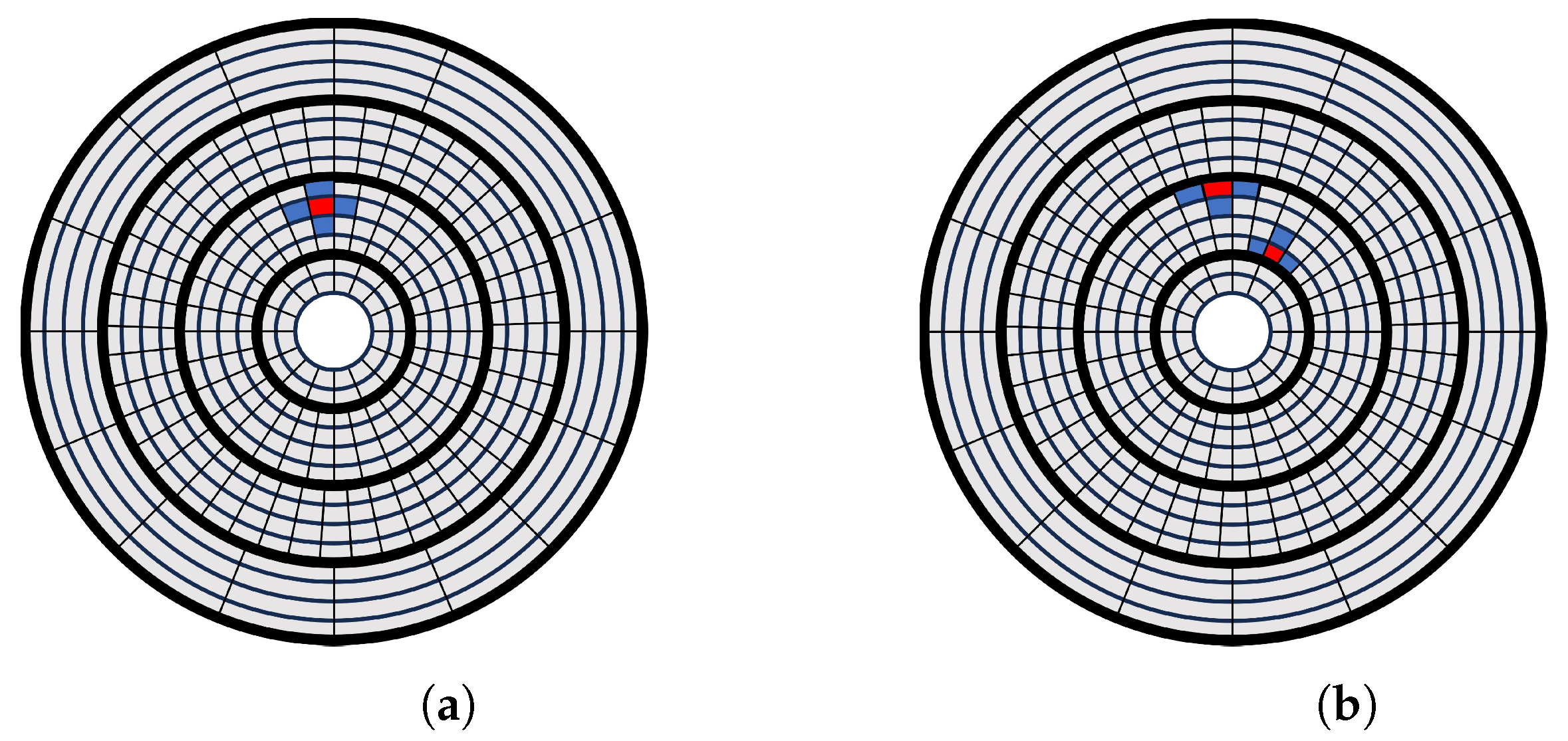
3.2. CZM: Concentric Zone Model
3.3. Stage One: Interference Point Removal
3.3.1. R-RNR: Region-Wise Reflected Noise Removal
3.3.2. R-VIR: Region-Wise Vertical Interference Removal
3.4. Stage Two: Ground Plane Fitting and Ground Point Segmentation
3.4.1. R-GPF: Region-Wise Ground Plane Fitting
3.4.2. R-GPVJ: Region-Wise Ground Plane Validity Judgment
3.4.3. R-IGPR: Region-Wise Invalid Ground Plane Repair
3.4.4. R-GPS: Region-Wise Ground Point Segmentation
4. Results and Discussion
4.1. Dataset Preparation
4.2. Evaluation Metrics
4.3. Parameter Setting
4.4. Comparison with Existing Methods
4.5. Effect of R-RNR
4.6. Algorithm Speed
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Roriz, R.; Cabral, J.; Gomes, T. Automotive LiDAR technology: A survey. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6282–6297. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. LOAM: Lidar odometry and mapping in real-time. In Proceedings of the Robotics: Science and Systems, Berkeley, CA, USA, 12–16 July 2014; Volume 2, pp. 1–9. [Google Scholar]
- Pramatarov, G.; De Martini, D.; Gadd, M.; Newman, P. BoxGraph: Semantic place recognition and pose estimation from 3D LiDAR. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 7004–7011. [Google Scholar]
- Chen, Y.; Liu, S.; Shen, X.; Jia, J. Fast point r-cnn. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9775–9784. [Google Scholar]
- Zimmer, W.; Ercelik, E.; Zhou, X.; Ortiz, X.J.D.; Knoll, A. A survey of robust 3d object detection methods in point clouds. arXiv 2022, arXiv:2204.00106. [Google Scholar]
- Wang, H.; Wang, B.; Liu, B.; Meng, X.; Yang, G. Pedestrian recognition and tracking using 3D LiDAR for autonomous vehicle. Robot. Auton. Syst. 2017, 88, 71–78. [Google Scholar] [CrossRef]
- Hasan, M.; Hanawa, J.; Goto, R.; Suzuki, R.; Fukuda, H.; Kuno, Y.; Kobayashi, Y. LiDAR-based detection, tracking, and property estimation: A contemporary review. Neurocomputing 2022, 506, 393–405. [Google Scholar] [CrossRef]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. Pointnet: Deep learning on point sets for 3d classification and segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 652–660. [Google Scholar]
- Gomes, T.; Matias, D.; Campos, A.; Cunha, L.; Roriz, R. A survey on ground segmentation methods for automotive LiDAR sensors. Sensors 2023, 23, 601. [Google Scholar] [CrossRef] [PubMed]
- Sun, P.; Zhao, X.; Xu, Z.; Wang, R.; Min, H. A 3D LiDAR data-based dedicated road boundary detection algorithm for autonomous vehicles. IEEE Access 2019, 7, 29623–29638. [Google Scholar] [CrossRef]
- Wang, G.; Wu, J.; He, R.; Yang, S. A point cloud-based robust road curb detection and tracking method. IEEE Access 2019, 7, 24611–24625. [Google Scholar] [CrossRef]
- Liu, Z.; Amini, A.; Zhu, S.; Karaman, S.; Han, S.; Rus, D.L. Efficient and robust lidar-based end-to-end navigation. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 13247–13254. [Google Scholar]
- Patoliya, J.; Mewada, H.; Hassaballah, M.; Khan, M.A.; Kadry, S. A robust autonomous navigation and mapping system based on GPS and LiDAR data for unconstraint environment. Earth Sci. Inform. 2022, 15, 2703–2715. [Google Scholar] [CrossRef]
- Lee, B.; Wei, Y.; Guo, I.Y. Automatic parking of self-driving car based on lidar. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2017, 42, 241–246. [Google Scholar] [CrossRef]
- He, C.; Zeng, H.; Huang, J.; Hua, X.S.; Zhang, L. Structure aware single-stage 3d object detection from point cloud. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 11873–11882. [Google Scholar]
- Fan, L.; Xiong, X.; Wang, F.; Wang, N.; Zhang, Z. Rangedet: In defense of range view for lidar-based 3d object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 2918–2927. [Google Scholar]
- Wu, J.; Xu, H.; Tian, Y.; Pi, R.; Yue, R. Vehicle detection under adverse weather from roadside LiDAR data. Sensors 2020, 20, 3433. [Google Scholar] [CrossRef] [PubMed]
- Wahyono, E.P.; Ningrum, E.S.; Dewanto, R.S.; Pramadihanto, D. Stereo vision-based obstacle avoidance module on 3D point cloud data. Telkomnika 2020, 18, 1514–1521. [Google Scholar] [CrossRef]
- Chen, H.; Lu, P. Real-time identification and avoidance of simultaneous static and dynamic obstacles on point cloud for UAVs navigation. Robot. Auton. Syst. 2022, 154, 104124. [Google Scholar] [CrossRef]
- Choi, J.; Ulbrich, S.; Lichte, B.; Maurer, M. Multi-target tracking using a 3d-lidar sensor for autonomous vehicles. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; pp. 881–886. [Google Scholar]
- Adnan, M.; Slavic, G.; Martin Gomez, D.; Marcenaro, L.; Regazzoni, C. Systematic and comprehensive review of clustering and multi-target tracking techniques for LiDAR point clouds in autonomous driving applications. Sensors 2023, 23, 6119. [Google Scholar] [CrossRef] [PubMed]
- Huang, W.; Liang, H.; Lin, L.; Wang, Z.; Wang, S.; Yu, B.; Niu, R. A fast point cloud ground segmentation approach based on coarse-to-fine Markov random field. IEEE Trans. Intell. Transp. Syst. 2021, 23, 7841–7854. [Google Scholar] [CrossRef]
- Bogoslavskyi, I.; Stachniss, C. Efficient online segmentation for sparse 3D laser scans. PFG- Photogramm. Remote. Sens. Geoinf. Sci. 2017, 85, 41–52. [Google Scholar] [CrossRef]
- Himmelsbach, M.; Hundelshausen, F.V.; Wuensche, H.J. Fast segmentation of 3D point clouds for ground vehicles. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium, La Jolla, CA, USA, 21–24 June 2010; pp. 560–565. [Google Scholar]
- Hu, X.; Rodriguez, F.S.A.; Gepperth, A. A multi-modal system for road detection and segmentation. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 1365–1370. [Google Scholar]
- Lim, H.; Oh, M.; Myung, H. Patchwork: Concentric zone-based region-wise ground segmentation with ground likelihood estimation using a 3D LiDAR sensor. IEEE Robot. Autom. Lett. 2021, 6, 6458–6465. [Google Scholar] [CrossRef]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. In Proceedings of the Advances in Neural Information Processing Systems 30 (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Hua, B.S.; Tran, M.K.; Yeung, S.K. Pointwise convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 984–993. [Google Scholar]
- Lee, S.; Lim, H.; Myung, H. Patchwork++: Fast and robust ground segmentation solving partial under-segmentation using 3D point cloud. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 13276–13283. [Google Scholar]
- Behley, J.; Garbade, M.; Milioto, A.; Quenzel, J.; Behnke, S.; Stachniss, C.; Gall, J. Semantickitti: A dataset for semantic scene understanding of lidar sequences. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9297–9307. [Google Scholar]
- Douillard, B.; Underwood, J.; Melkumyan, N.; Singh, S.; Vasudevan, S.; Brunner, C.; Quadros, A. Hybrid elevation maps: 3D surface models for segmentation. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 1532–1538. [Google Scholar]
- Anand, B.; Senapati, M.; Barsaiyan, V.; Rajalakshmi, P. LiDAR-INS/GNSS-based real-time ground removal, segmentation, and georeferencing framework for smart transportation. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Zermas, D.; Izzat, I.; Papanikolopoulos, N. Fast segmentation of 3d point clouds: A paradigm on lidar data for autonomous vehicle applications. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5067–5073. [Google Scholar]
- Bogoslavskyi, I.; Stachniss, C. Fast range image-based segmentation of sparse 3d laser scans for online operation. In Proceedings of the RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 163–169. [Google Scholar]
- Guo, D.; Yang, G.; Qi, B.; Wang, C. A Fast Ground Segmentation Method of LiDAR Point Cloud From Coarse-to-Fine. IEEE Sens. J. 2022, 23, 1357–1367. [Google Scholar] [CrossRef]
- Moosmann, F.; Pink, O.; Stiller, C. Segmentation of 3D lidar data in non-flat urban environments using a local convexity criterion. In Proceedings of the 2009 IEEE Intelligent Vehicles Symposium, Xi’an, China, 3–5 June 2009; pp. 215–220. [Google Scholar]
- Rummelhard, L.; Paigwar, A.; Nègre, A.; Laugier, C. Ground estimation and point cloud segmentation using spatiotemporal conditional random field. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1105–1110. [Google Scholar]
- Varney, N.; Asari, V.K. Pyramid point: A multi-level focusing network for revisiting feature layers. IEEE Geosci. Remote Sens. Lett. 2022; Early Access. [Google Scholar] [CrossRef]
- Narksri, P.; Takeuchi, E.; Ninomiya, Y.; Morales, Y.; Akai, N.; Kawaguchi, N. A slope-robust cascaded ground segmentation in 3D point cloud for autonomous vehicles. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 497–504. [Google Scholar]
- Lim, H.; Hwang, S.; Myung, H. ERASOR: Egocentric ratio of pseudo occupancy-based dynamic object removal for static 3D point cloud map building. IEEE Robot. Autom. Lett. 2021, 6, 2272–2279. [Google Scholar] [CrossRef]
- Zhao, X.; Yang, Z.; Schwertfeger, S. Mapping with reflection-detection and utilization of reflection in 3d lidar scans. In Proceedings of the 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Abu Dhabi, United Arab Emirates, 4–6 November 2020; pp. 27–33. [Google Scholar]
- Feng, C.; Taguchi, Y.; Kamat, V.R. Fast plane extraction in organized point clouds using agglomerative hierarchical clustering. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6218–6225. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Uprightness | Elevation | Flatness | Validity |
|---|---|---|---|---|
| 1 | ✗ | - | - | ✗ |
| 2 | ✔ | ✗ | ✗ | ✗ |
| 3 | ✔ | ✔ | - | ✔ |
| 4 | ✔ | - | ✔ | ✔ |
| Method | Precision (%) | Recall (%) | F1 (%) | Time (ms) |
|---|---|---|---|---|
| LineFit [24] | 87.80 | 71.95 | 78.00 | 267.9 |
| GPF [33] | 74.50 | 95.55 | 82.50 | 179.8 |
| Patchwork [26] | 72.74 | 98.12 | 82.59 | 15.3 |
| Patchwork++ [29] | 73.23 | 99.30 | 83.32 | 28.6 |
| Proposed | 77.26 | 98.59 | 85.69 | 30.6 |
| Part | Percentage of Time (%) |
|---|---|
| CZM | 10.7 |
| R-RNR | 11.3 |
| R-VIR | 9.4 |
| R-GPF | 12.6 |
| R-GPVJ | 7.2 |
| R-IGPR | 7.4 |
| R-GPS | 11.6 |
| Others | 29.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, W.; Chen, X.; Jiang, J. A Staged Real-Time Ground Segmentation Algorithm of 3D LiDAR Point Cloud. Electronics 2024, 13, 841. https://doi.org/10.3390/electronics13050841
Deng W, Chen X, Jiang J. A Staged Real-Time Ground Segmentation Algorithm of 3D LiDAR Point Cloud. Electronics. 2024; 13(5):841. https://doi.org/10.3390/electronics13050841
Chicago/Turabian StyleDeng, Weiye, Xiaoping Chen, and Jingwei Jiang. 2024. "A Staged Real-Time Ground Segmentation Algorithm of 3D LiDAR Point Cloud" Electronics 13, no. 5: 841. https://doi.org/10.3390/electronics13050841
APA StyleDeng, W., Chen, X., & Jiang, J. (2024). A Staged Real-Time Ground Segmentation Algorithm of 3D LiDAR Point Cloud. Electronics, 13(5), 841. https://doi.org/10.3390/electronics13050841