
Evolutionary Competition Multitasking Optimization with Online Resource Allocation for Endmemeber Extraction of Hyperspectral Images



Abstract
:1. Introduction
2. Background and Related Works
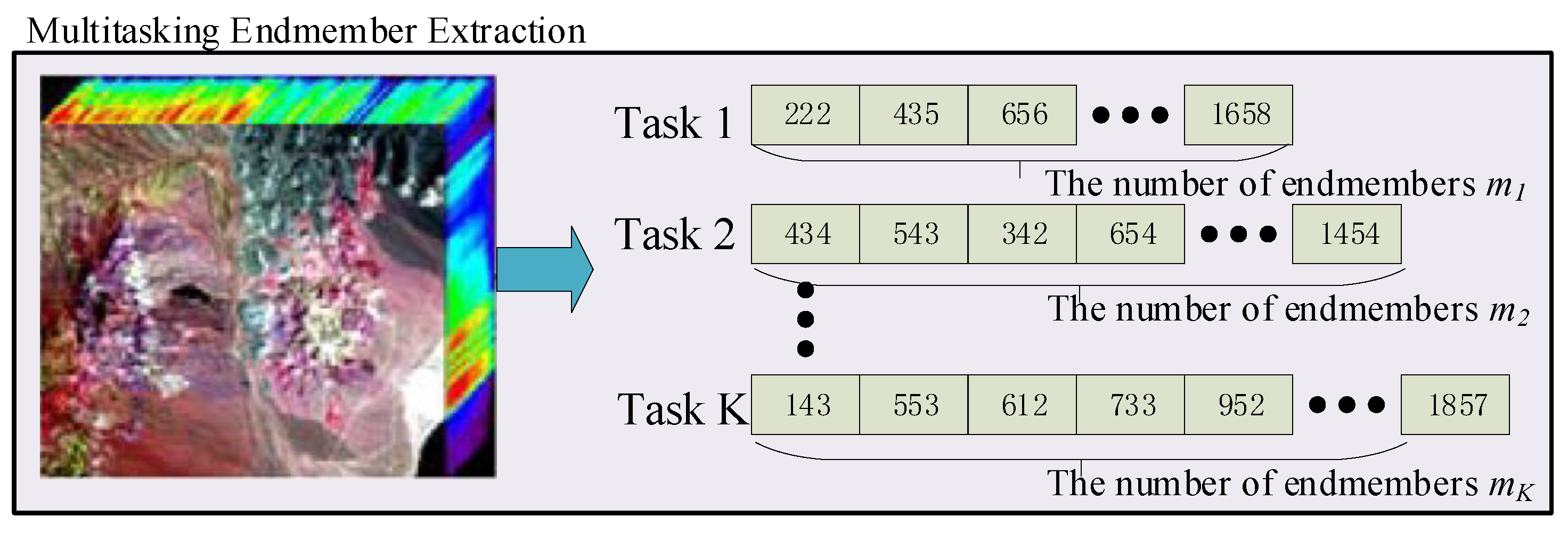
2.1. Endmember Extraction
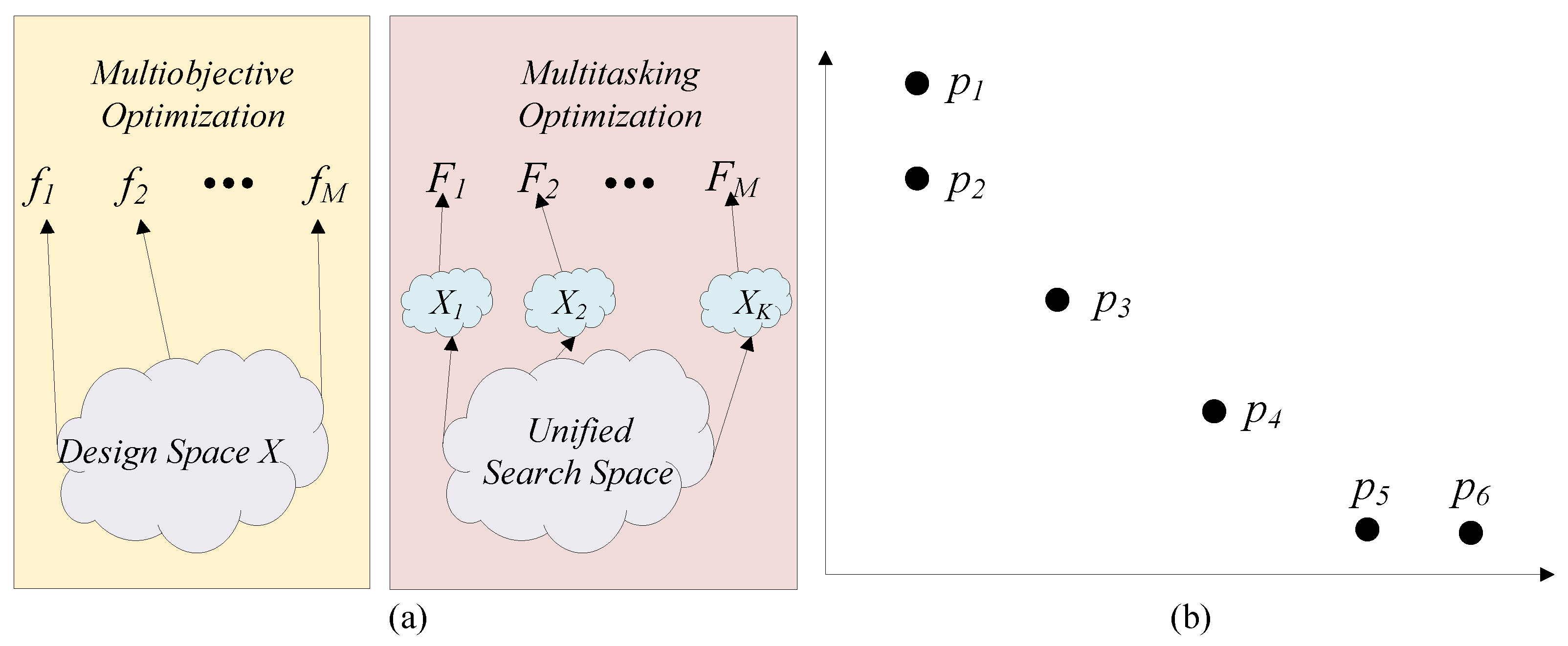
2.2. Evolutionary Multitasking Optimization
3. Methodology
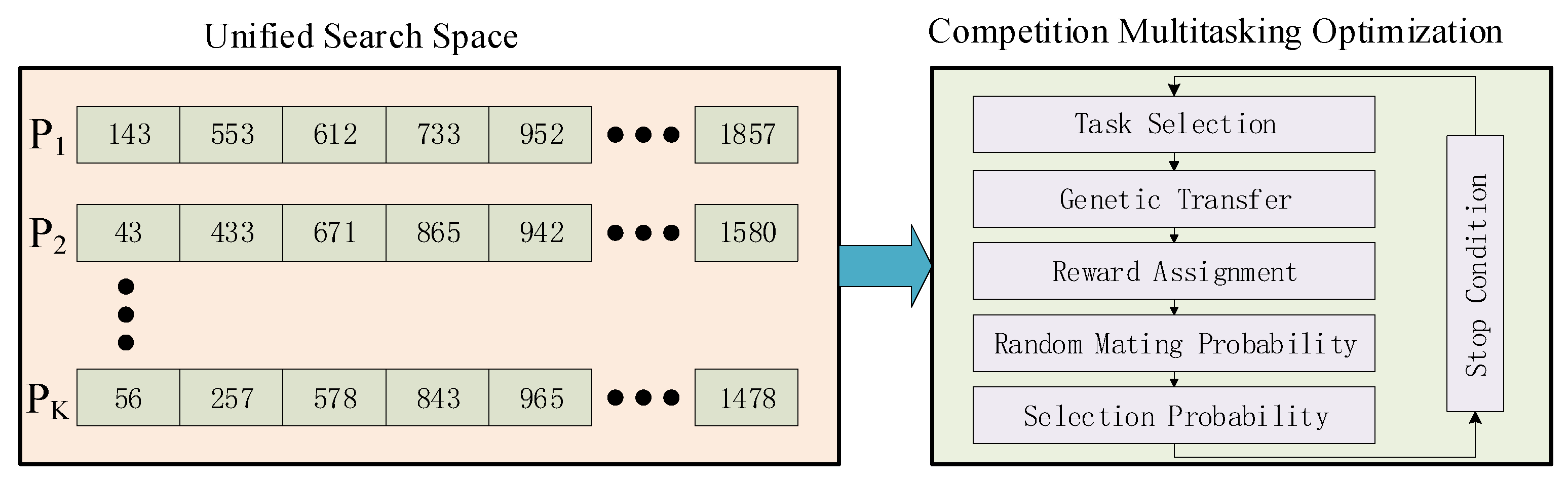
3.1. Framework of Competition Multitasking Endmember Extraction
| Algorithm 1 Algorithm of Competition Multitasking Endmember Extraction. |
| Input: N: the population size; : max generation number.
Output: The endmember extraction result with best objective function value.
|
3.1.1. Representation and Initialization
3.1.2. Task Selection
3.2. Genetic Transfer Based Differential Evolution
| Algorithm 2 Algorithm of Genetic Transfer. |
|
3.3. Online Resource Allocation with Competition Reward
4. Experimental Study
- (1)
- N-FINDER [16]: This method is based on the observation that the N-volume enclosed by a simplex made of the purest pixels is greater than any other volume made of any other combination of pixels in N spectral dimensions. A single realization is defined as a single run with a single set of random beginning endmembers.
- (2)
- VCA [17]: This procedure takes advantage of two facts: (1) the vertices of a simplex are its endmembers; and (2) the simplex that results from an affine translation is likewise a simplex.
- (3)
- PPI [13]: This algorithm expedites its procedure by generating a suitable initial set of endmembers. To become better at each iteration until it reaches a final set of endmembers, an iterative rule is designed.
- (4)
- DPSO [20]: In order to decrease the impact of data mistakes on endmember extraction results and increase endmember extraction accuracy, this algorithm expends PSO in discrete space during endmember extraction.
- (5)
- ADEE [21]: With the introduction of a self-adaptive mechanism to adaptively modify the DE parameters, this approach no longer relies on the theory of convex geometry and allows for the acquisition of optimal values, without the need for a user-defined process.
- (6)
- MFEA [26]: This method was implemented within the proposed framework. Endmember extractions with different numbers of endmembers were considered as multiple tasks. However, these tasks were not competitive.
4.1. Experiment on Simu-5 Data
4.2. Experiment on Simu-10 Data
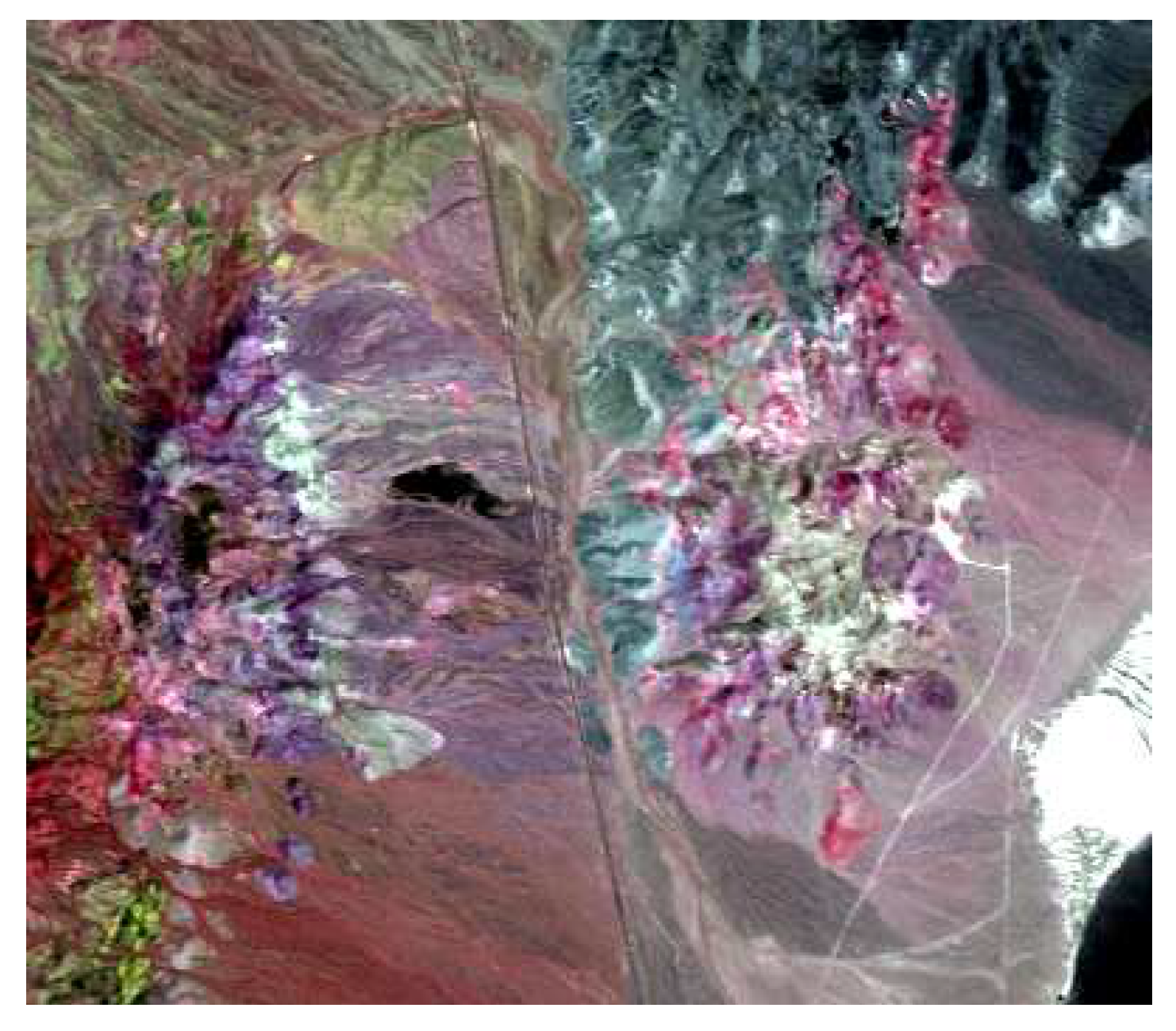
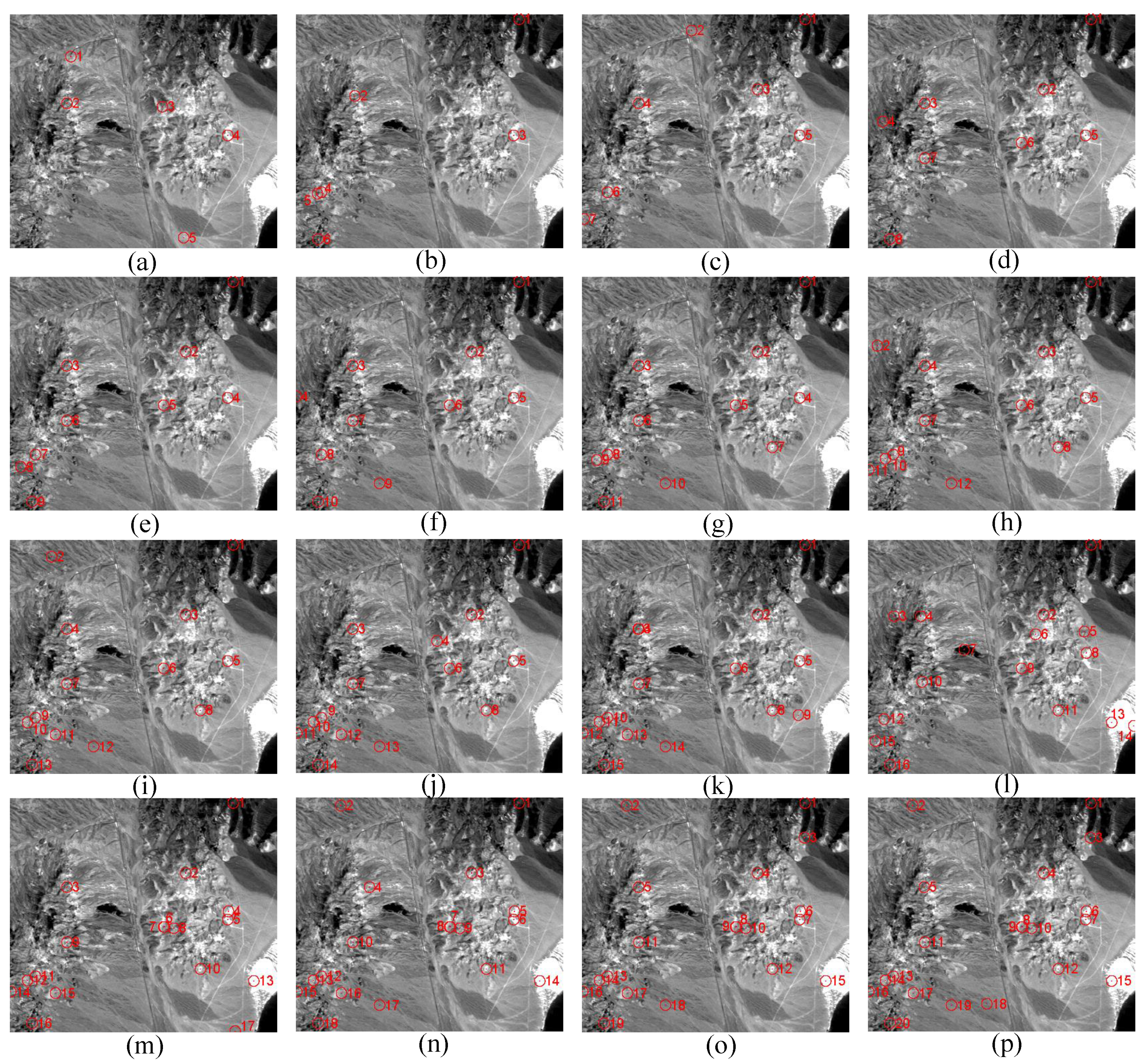
4.3. Experiment on Real Data
5. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ross, B.J.; Gualtieri, A.G.; Fueten, F.; Budkewitsch, P. Hyperspectral image analysis using genetic programming. Appl. Soft Comput. 2005, 5, 147–156. [Google Scholar] [CrossRef]
- Bioucas-Dias, J.M.; Plaza, A.; Camps-Valls, G.; Scheunders, P.; Nasrabadi, N.; Chanussot, J. Hyperspectral remote sensing data analysis and future challenges. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–36. [Google Scholar] [CrossRef]
- Bai, Y.; Xu, M.; Zhang, L.; Liu, Y. Pruning Multi-Scale Multi-Branch Network for Small-Sample Hyperspectral Image Classification. Electronics 2023, 12, 674. [Google Scholar] [CrossRef]
- Hennessy, A.; Clarke, K.; Lewis, M. Hyperspectral classification of plants: A review of waveband selection generalisability. Remote Sens. 2020, 12, 113. [Google Scholar] [CrossRef]
- Liu, X.; Kou, Y.; Fu, M. Hyperspectral Image Shadow Enhancement Using Three-Dimensional Dynamic Stochastic Resonance and Classification Based on ResNet. Electronics 2024, 13, 500. [Google Scholar] [CrossRef]
- Feng, D.; Zhang, M.; Wang, S. Multipopulation Particle Swarm Optimization for Evolutionary Multitasking Sparse Unmixing. Electronics 2021, 10, 3034. [Google Scholar] [CrossRef]
- Deng, C.; Chen, Y.; Zhang, S.; Li, F.; Lai, P.; Su, D.; Hu, M.; Wang, S. Robust dual spatial weighted sparse unmixing for remotely sensed hyperspectral imagery. Remote Sens. 2023, 15, 4056. [Google Scholar] [CrossRef]
- Gong, M.; Li, H.; Luo, E.; Liu, J.; Liu, J. A multiobjective cooperative coevolutionary algorithm for hyperspectral sparse unmixing. IEEE Trans. Evol. Comput. 2016, 21, 234–248. [Google Scholar] [CrossRef]
- Li, H.; Li, D.; Gong, M.; Li, J.; Qin, A.; Xing, L.; Xie, F. Sparse Hyperspectral Unmixing With Preference-Based Evolutionary Multiobjective Multitasking Optimization. IEEE Trans. Emerg. Top. Comput. Intell. 2024, 8, 1922–1937. [Google Scholar] [CrossRef]
- Brezini, S.E.; Deville, Y. Hyperspectral and Multispectral Image Fusion with Automated Extraction of Image-Based Endmember Bundles and Sparsity-Based Unmixing to Deal with Spectral Variability. Sensors 2023, 23, 2341. [Google Scholar] [CrossRef]
- Wang, Z.; Wei, J.; Li, J.; Li, P.; Xie, F. Evolutionary Multiobjective Optimization with Endmember Priori Strategy for Large-Scale Hyperspectral Sparse Unmixing. Electronics 2021, 10, 2079. [Google Scholar] [CrossRef]
- Boardman, J.W.; Kruse, F.A.; Green, R.O. Mapping Target Signatures via Partial Unmixing of AVIRIS Data. In Proceedings of the Summaries of the Fifth Annual JPL Airborne Earth Science Worksho, Pasadena, CA, USA, 4–8 March 1995; pp. 23–26. [Google Scholar]
- Chang, C.I.; Plaza, A. A fast iterative algorithm for implementation of pixel purity index. IEEE Geosci. Remote Sens. Lett. 2006, 3, 63–67. [Google Scholar] [CrossRef]
- Kalaivani, S.; Vimaladevi, M. Enhancing Endmember Extraction using K-Means Clustering and Pixel Purity Index. In Proceedings of the 2023 2nd International Conference on Vision Towards Emerging Trends in Communication and Networking Technologies (ViTECoN), Vellore, India, 5–6 May 2023; pp. 1–6. [Google Scholar]
- Winter, M.E. N-FINDR: An Algorithm for Fast Autonomous Spectral End-Member Determination in Hyperspectral Data. In Proceedings of the SPIE, Newport Beach, CA, USA, 2–4 March 1999; pp. 266–275. [Google Scholar]
- Chang, C.I.; Wu, C.C.; Tsai, C.T. Random N-finder (N-FINDR) endmember extraction algorithms for hyperspectral imagery. IEEE Trans. Image Process. 2010, 20, 641–656. [Google Scholar] [CrossRef] [PubMed]
- Nascimento, J.; Bioucas Dias, J. Vertex component analysis: A fast algorithm to unmix hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 898–910. [Google Scholar] [CrossRef]
- Ifarraguerri, A.; Chang, C.I. Multispectral and hyperspectral image analysis with convex cones. IEEE Trans. Geosci. Remote Sens. 1999, 37, 756–770. [Google Scholar] [CrossRef]
- Chang, C.I.; Wu, C.C.; Liu, W.m.; Ouyang, Y.C. A new growing method for simplex-based endmember extraction algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2804–2819. [Google Scholar] [CrossRef]
- Zhang, B.; Sun, X.; Gao, L.; Yang, L. Endmember Extraction of Hyperspectral Remote Sensing Images Based on the Discrete Particle Swarm Optimization Algorithm. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4173–4176. [Google Scholar] [CrossRef]
- Zhong, Y.; Zhao, L.; Zhang, L. An Adaptive Differential Evolution Endmember Extraction Algorithm for Hyperspectral Remote Sensing Imagery. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1061–1065. [Google Scholar] [CrossRef]
- Cheng, F.; Chen, N.; Wang, C.; Wang, Q.; Du, B. A Global-to-Local Evolutionary Algorithm for Hyperspectral Endmember Extraction. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–17. [Google Scholar] [CrossRef]
- Zhang, B.; Sun, X.; Gao, L.; Yang, L. Endmember Extraction of Hyperspectral Remote Sensing Images Based on the Ant Colony Optimization (ACO) Algorithm. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2635–2646. [Google Scholar] [CrossRef]
- Chang, C.I.; Du, Q. Estimation of number of spectrally distinct signal sources in hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2004, 42, 608–619. [Google Scholar] [CrossRef]
- Dias, J.; Nascimento, J. Estimation of Signal Subspace on Hyperspectral Data. In Proceedings of the SPIE, San Diego, CA, USA, 31 July–4 August 2005; Volume 5982, pp. 191–198. [Google Scholar]
- Gupta, A.; Ong, Y.S.; Feng, L. Multifactorial evolution: Toward evolutionary multitasking. IEEE Trans. Evol. Comput. 2015, 20, 343–357. [Google Scholar] [CrossRef]
- Zhao, H.; Ning, X.; Liu, X.; Wang, C.; Liu, J. What makes evolutionary multi-task optimization better: A comprehensive survey. Appl. Soft Comput. 2023, 145, 110545. [Google Scholar] [CrossRef]
- Li, H.; Wan, F.; Gong, M.; Qin, A.; Wu, Y.; Xing, L. Privacy-Enhanced Multitasking Particle Swarm Optimization based on Homomorphic Encryption. IEEE Trans. Evol. Comput. 2023. [Google Scholar] [CrossRef]
- Gupta, A.; Ong, Y.S.; Da, B.; Feng, L.; Handoko, S.D. Landscape Synergy in Evolutionary Multitasking. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 3076–3083. [Google Scholar]
- Cheng, F.; Shu, S.; Zhang, L.; Tan, M.; Qiu, J. An Evolutionary Multitasking Method for High-Dimensional Receiver Operating Characteristic Convex Hull Maximization. IEEE Trans. Emerg. Top. Comput. Intell. 2024, 8, 1699–1713. [Google Scholar] [CrossRef]
- Li, H.; Ong, Y.S.; Gong, M.; Wang, Z. Evolutionary multitasking sparse reconstruction: Framework and case study. IEEE Trans. Evol. Comput. 2018, 23, 733–747. [Google Scholar] [CrossRef]
- Li, H.; Luo, T.; Liu, L.; Gong, M.; Qiao, W.; Xie, F.; Qin, A. Selective Transfer Based Evolutionary Multitasking Optimization for Change Detection. IEEE Trans. Emerg. Top. Comput. Intell. 2024, 1–16. [Google Scholar] [CrossRef]
- Li, J.; Gong, M.; Wei, J.; Zhang, Y.; Zhao, Y.; Wang, S.; Jiang, X. Evolutionary multitasking cooperative transfer for multiobjective hyperspectral sparse unmixing. Knowl.-Based Syst. 2024, 285, 111306. [Google Scholar] [CrossRef]
- Shi, J.; Shao, T.; Liu, X.; Zhang, X.; Zhang, Z.; Lei, Y. Evolutionary multitask ensemble learning model for hyperspectral image classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 936–950. [Google Scholar] [CrossRef]
- Li, G.; Zhang, Q.; Wang, Z. Evolutionary competitive multitasking optimization. IEEE Trans. Evol. Comput. 2022, 26, 278–289. [Google Scholar] [CrossRef]
- Li, Y.; Gong, W.; Li, S. Evolutionary competitive multitasking optimization via improved adaptive differential evolution. Expert Syst. Appl. 2023, 217, 119550. [Google Scholar] [CrossRef]
- Settle, J.; Drake, N. Linear mixing and the estimation of ground cover proportions. Int. J. Remote Sens. 1993, 14, 1159–1177. [Google Scholar] [CrossRef]
- Heinz, D.C.; Chang, C.I. Fully constrained least squares linear spectral mixture analysis method for material quantification in hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2001, 39, 529–545. [Google Scholar] [CrossRef]
- Li, H.; Gong, M.; Wang, Q.; Liu, J.; Su, L. A multiobjective fuzzy clustering method for change detection in SAR images. Appl. Soft Comput. 2016, 46, 767–777. [Google Scholar] [CrossRef]
- Liang, Z.; Zhu, Y.; Wang, X.; Li, Z.; Zhu, Z. Evolutionary multitasking for multi-objective optimization based on generative strategies. IEEE Trans. Evol. Comput. 2022, 27, 1042–1056. [Google Scholar] [CrossRef]
- Liu, R.; Wang, P.; Du, B.; Qu, B. Endmember Bundle Extraction Based on Improved Multi-objective Particle Swarm Optimization. IEEE Geosci. Remote Sens. Lett. 2023, 20, 5506405. [Google Scholar]
- Xu, M.; Du, B.; Zhang, L. Spatial-Spectral Information Based Abundance-Constrained Endmember Extraction Methods. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2004–2015. [Google Scholar] [CrossRef]
- Rezaei, Y.; Mobasheri, M.; Zoej, M.; Schaepman, M. Endmember Extraction Using a Combination of Orthogonal Projection and Genetic Algorithm. IEEE Geosci. Remote Sens. Lett. 2012, 9, 161–165. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR | Task | N-FINDR | VCA | PPI | DPSO | ADEE | MFEA | CMTEE |
|---|---|---|---|---|---|---|---|---|
| 10 | 3 | 0.2721 | 0.2714 | 0.3089 | 0.2728 | 0.2749 | 0.2751 | 0.2649 |
| 4 | 0.2634 | 0.2610 | 0.3259 | 0.2652 | 0.2634 | 0.2641 | 0.2543 | |
| 5 | 0.2567 | 0.2583 | 0.2637 | 0.2552 | 0.2580 | 0.2583 | 0.2521 | |
| 6 | 0.2516 | 0.2505 | 0.2559 | 0.2523 | 0.2565 | 0.2552 | 0.2487 | |
| 20 | 3 | 0.0905 | 0.0905 | 0.2056 | 0.0927 | 0.0911 | 0.0949 | 0.0892 |
| 4 | 0.0852 | 0.0852 | 0.2041 | 0.0876 | 0.0877 | 0.0874 | 0.0826 | |
| 5 | 0.0812 | 0.0812 | 0.0930 | 0.0849 | 0.0816 | 0.0849 | 0.0812 | |
| 6 | 0.0797 | 0.0802 | 0.0874 | 0.0847 | 0.0801 | 0.0817 | 0.0789 | |
| 30 | 3 | 0.0395 | 0.0391 | 0.0455 | 0.0389 | 0.0398 | 0.0399 | 0.0388 |
| 4 | 0.0287 | 0.0282 | 0.0449 | 0.0384 | 0.0366 | 0.0282 | 0.0275 | |
| 5 | 0.0259 | 0.0259 | 0.0443 | 0.0306 | 0.0260 | 0.0256 | 0.0251 | |
| 6 | 0.0257 | 0.0255 | 0.0444 | 0.0301 | 0.0257 | 0.0252 | 0.0249 |
| SNR | Task | N-FINDR | VCA | PPI | DPSO | ADEE | MFEA | CMTEE |
|---|---|---|---|---|---|---|---|---|
| 10 | 2 | 0.2874 | 0.2874 | 0.3095 | 0.4143 | 0.3177 | 0.3069 | 0.2796 |
| 3 | 0.2738 | 0.2690 | 0.2832 | 0.2826 | 0.3001 | 0.2704 | 0.2676 | |
| 4 | 0.2597 | 0.2632 | 0.4291 | 0.2767 | 0.2611 | 0.2570 | 0.2409 | |
| 5 | 0.2465 | 0.2469 | 0.2635 | 0.2628 | 0.2526 | 0.2518 | 0.2411 | |
| 6 | 0.2431 | 0.2440 | 0.4099 | 0.2574 | 0.2431 | 0.2466 | 0.2358 | |
| 7 | 0.2409 | 0.2413 | 0.4200 | 0.2461 | 0.2411 | 0.2448 | 0.2286 | |
| 8 | 0.2372 | 0.2411 | 0.2419 | 0.2418 | 0.2394 | 0.2404 | 0.2213 | |
| 9 | 0.2362 | 0.2350 | 0.3026 | 0.2373 | 0.2360 | 0.2405 | 0.2205 | |
| 10 | 0.2332 | 0.2372 | 0.2395 | 0.2362 | 0.2371 | 0.2371 | 0.2171 | |
| 20 | 2 | 0.1188 | 0.1188 | 0.1120 | 0.1054 | 0.1766 | 0.1185 | 0.0985 |
| 3 | 0.1069 | 0.1002 | 0.1139 | 0.0982 | 0.1732 | 0.1077 | 0.0977 | |
| 4 | 0.0967 | 0.0967 | 0.1156 | 0.0967 | 0.1731 | 0.0981 | 0.0881 | |
| 5 | 0.0845 | 0.0843 | 0.1155 | 0.0902 | 0.0850 | 0.0974 | 0.0841 | |
| 6 | 0.0845 | 0.0840 | 0.1194 | 0.0884 | 0.0860 | 0.0897 | 0.0815 | |
| 7 | 0.0822 | 0.0807 | 0.1169 | 0.0877 | 0.0822 | 0.0889 | 0.0789 | |
| 8 | 0.0804 | 0.0806 | 0.1139 | 0.0848 | 0.0811 | 0.0883 | 0.0780 | |
| 9 | 0.0802 | 0.0851 | 0.1148 | 0.0837 | 0.0797 | 0.0878 | 0.0778 | |
| 10 | 0.0808 | 0.0787 | 0.1098 | 0.0801 | 0.0796 | 0.0872 | 0.0772 | |
| 30 | 2 | 0.0863 | 0.0863 | 0.0812 | 0.0802 | 0.1542 | 0.0769 | 0.0713 |
| 3 | 0.0703 | 0.0703 | 0.0809 | 0.0655 | 0.1532 | 0.0602 | 0.0572 | |
| 4 | 0.0563 | 0.0577 | 0.0798 | 0.0620 | 0.0559 | 0.0463 | 0.0425 | |
| 5 | 0.0350 | 0.0358 | 0.0797 | 0.0620 | 0.0363 | 0.0462 | 0.0343 | |
| 6 | 0.0343 | 0.0332 | 0.0841 | 0.0619 | 0.0442 | 0.0454 | 0.0314 | |
| 7 | 0.0304 | 0.0358 | 0.0794 | 0.0617 | 0.0304 | 0.0453 | 0.0275 | |
| 8 | 0.0299 | 0.0378 | 0.0838 | 0.0615 | 0.0300 | 0.0450 | 0.0274 | |
| 9 | 0.0382 | 0.0326 | 0.0836 | 0.0615 | 0.0315 | 0.0449 | 0.0271 | |
| 10 | 0.0315 | 0.0325 | 0.0832 | 0.0614 | 0.0318 | 0.0447 | 0.0268 |
| Task | N-FINDR | VCA | PPI | DPSO | ADEE | MFEA | CMTEE |
|---|---|---|---|---|---|---|---|
| 5 | 6.0611 | 6.2016 | 16.3606 | 9.7311 | 6.0725 | 5.6523 | 5.2366 |
| 6 | 5.0002 | 5.1319 | 16.2041 | 6.8691 | 5.9088 | 5.9938 | 4.9047 |
| 7 | 4.5431 | 4.8048 | 6.9553 | 6.5380 | 5.7093 | 5.2285 | 4.5731 |
| 8 | 4.0494 | 4.4860 | 6.8615 | 6.3917 | 5.8609 | 4.9255 | 4.2613 |
| 9 | 5.6754 | 5.1432 | 6.7402 | 6.3256 | 5.6077 | 4.2932 | 4.0963 |
| 10 | 5.9306 | 10.1650 | 6.6598 | 8.7772 | 5.6515 | 4.2632 | 3.9851 |
| 11 | 4.0359 | 4.3421 | 5.1278 | 8.6297 | 4.0411 | 4.0371 | 3.7638 |
| 12 | 3.9731 | 4.8311 | 5.1191 | 5.1801 | 4.6753 | 4.2423 | 3.7474 |
| 13 | 4.3615 | 4.0256 | 4.9558 | 4.8639 | 4.1949 | 4.1287 | 3.4663 |
| 14 | 3.7515 | 3.6142 | 5.0971 | 6.2888 | 4.4934 | 4.0804 | 3.4071 |
| 15 | 3.3183 | 3.4531 | 5.0172 | 7.5295 | 4.4459 | 3.7511 | 3.1989 |
| 16 | 3.2659 | 3.3616 | 4.6365 | 4.6269 | 3.6865 | 3.2994 | 3.1068 |
| 17 | 3.9059 | 3.8367 | 4.6918 | 4.5709 | 3.6453 | 3.2287 | 3.1962 |
| 18 | 3.4909 | 3.3714 | 4.3271 | 4.4648 | 3.7064 | 3.2217 | 3.0987 |
| 19 | 3.5707 | 3.0910 | 4.1299 | 4.4276 | 3.5280 | 3.1338 | 2.9892 |
| 20 | 3.1629 | 3.5117 | 4.9582 | 4.3434 | 3.7154 | 3.1301 | 2.8980 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shang, Y.; Wang, Q.; Zhu, W.; Xie, F.; Wang, H.; Li, L. Evolutionary Competition Multitasking Optimization with Online Resource Allocation for Endmemeber Extraction of Hyperspectral Images. Electronics 2024, 13, 1424. https://doi.org/10.3390/electronics13081424
Shang Y, Wang Q, Zhu W, Xie F, Wang H, Li L. Evolutionary Competition Multitasking Optimization with Online Resource Allocation for Endmemeber Extraction of Hyperspectral Images. Electronics. 2024; 13(8):1424. https://doi.org/10.3390/electronics13081424
Chicago/Turabian StyleShang, Yiming, Qian Wang, Wenbo Zhu, Fei Xie, Hexu Wang, and Lei Li. 2024. "Evolutionary Competition Multitasking Optimization with Online Resource Allocation for Endmemeber Extraction of Hyperspectral Images" Electronics 13, no. 8: 1424. https://doi.org/10.3390/electronics13081424