
A Dynamic UKF-Based UWB/Wheel Odometry Tightly Coupled Approach for Indoor Positioning

Abstract
:1. Introduction
- Propose a simple method to identify and mitigate the NLOS effects on UWB-ranging values, assisted by odometry data.
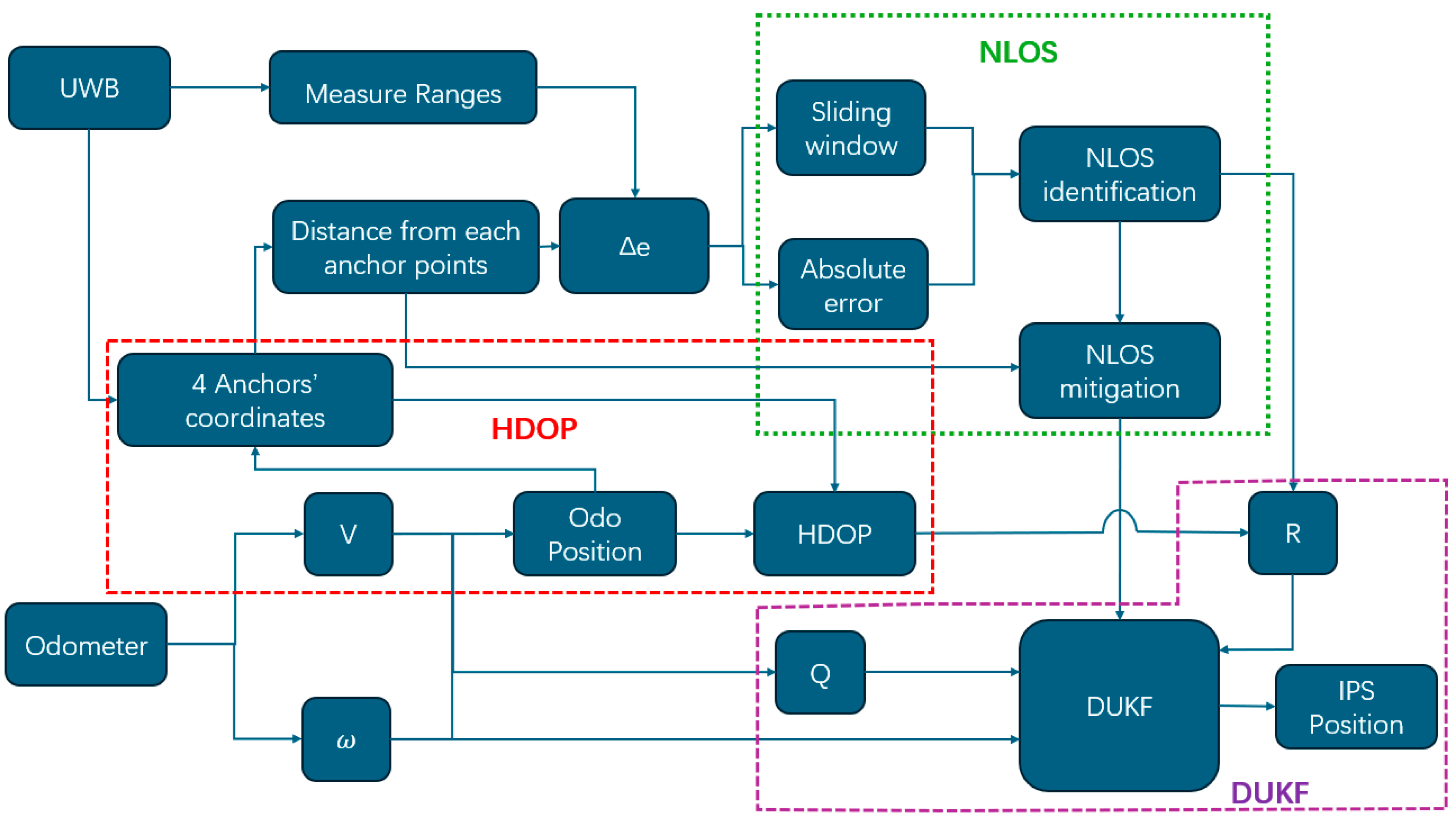
- Propose a DUKF fusion method that dynamically adjusts the UKF based on NLOS, HDOP, and robot motion states to achieve more accurate localisation.
- Compared with previous studies, the experimental environment designed in this paper is harsher for the fusion system of UWB and the odometer, which is better for verifying the accuracy and robustness of the system.
2. Methods
2.1. NLOS Identification and Mitigation
2.2. HDOP
2.3. UKF
3. Experimental Design and Results
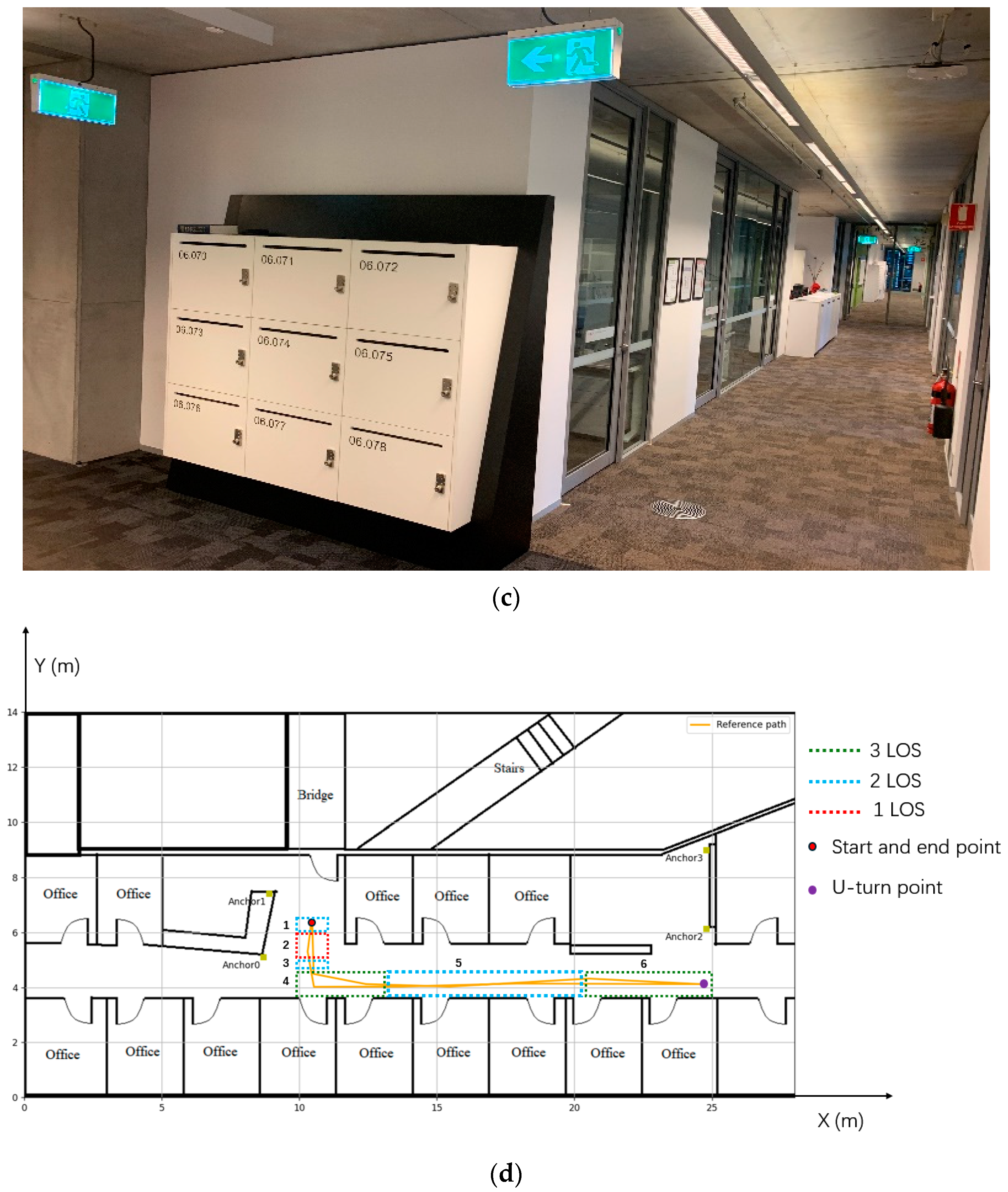
3.1. Experimental Equipment and Environment
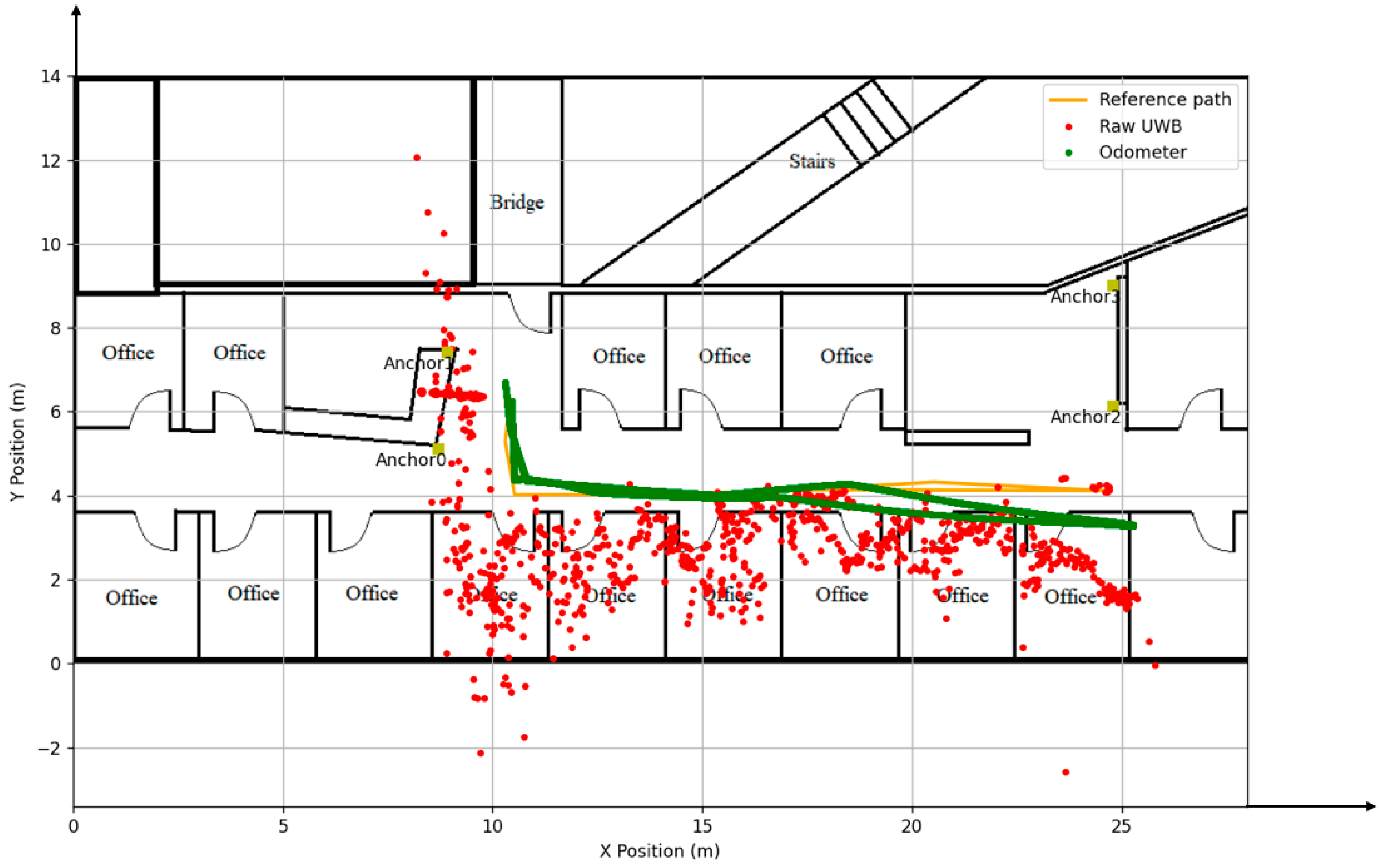
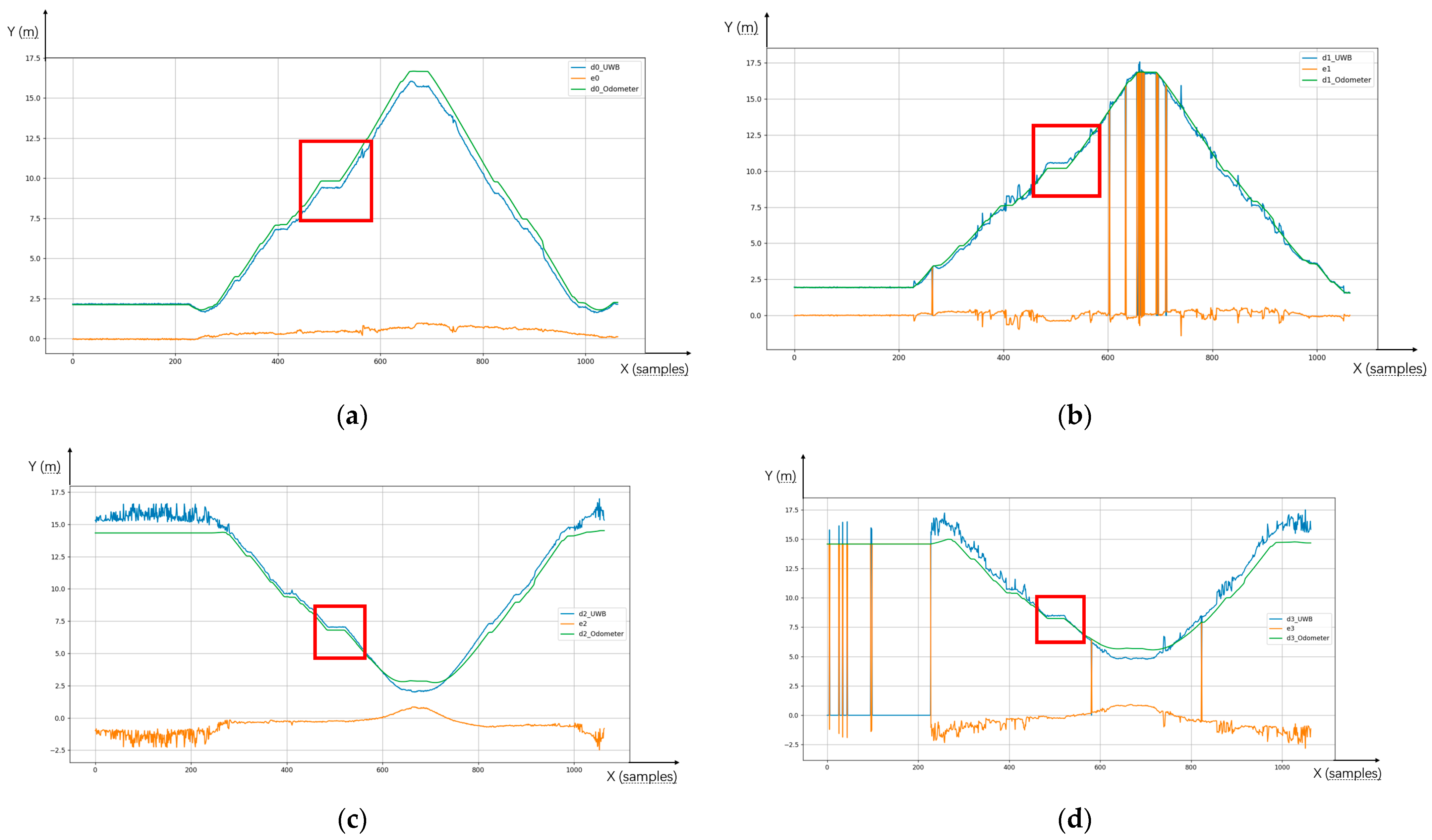
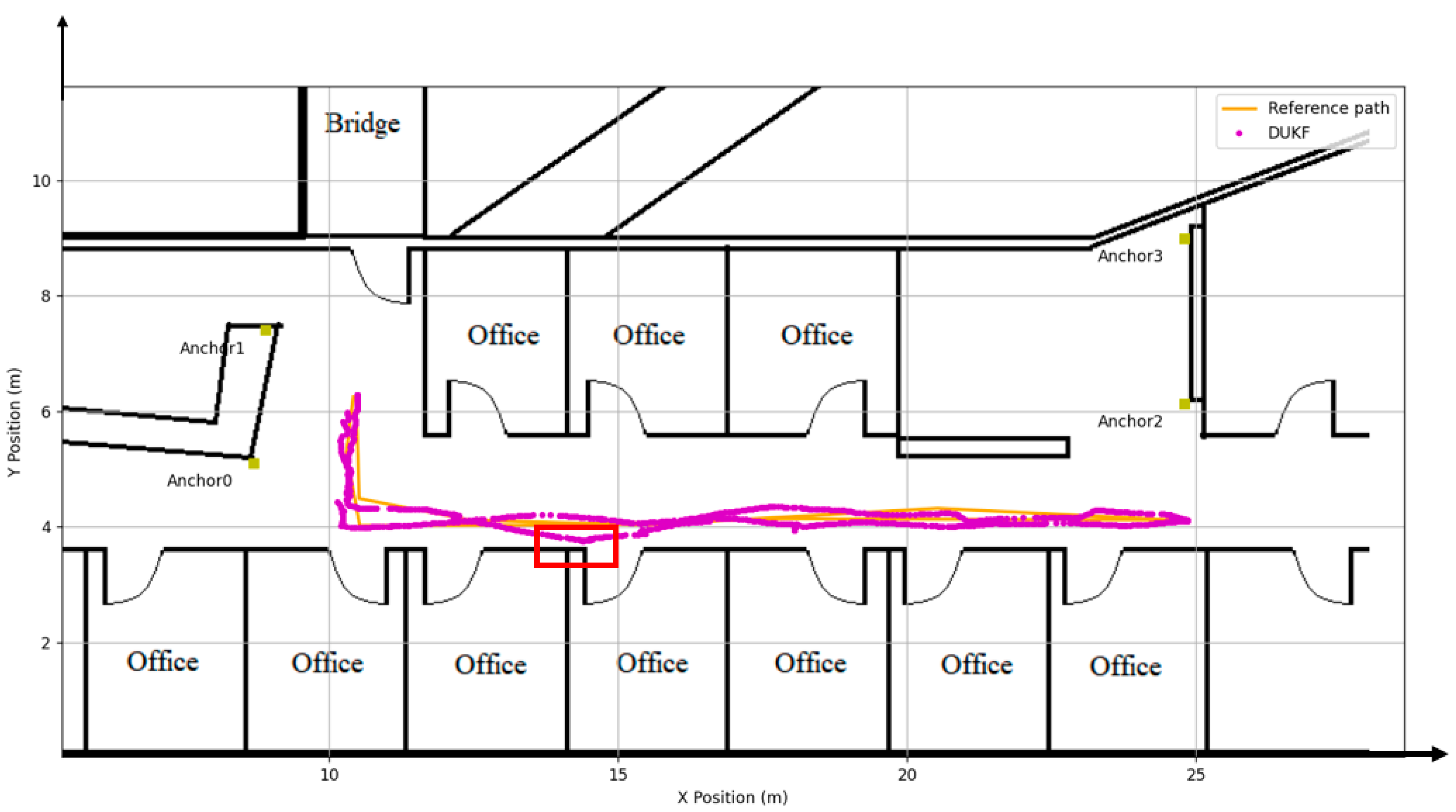
3.2. Experiment Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Poulose, A.; Eyobu, O.S.; Kim, M.; Han, D.S. Localization error analysis of indoor positioning system based on UWB measurements. In Proceedings of the 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Split, Croatia, 2–5 July 2019; pp. 84–88. [Google Scholar]
- Sun, W.; Xue, M.; Yu, H.; Tang, H.; Lin, A. Augmentation of fingerprints for indoor WiFi localization based on Gaussian process regression. IEEE Trans. Veh. Technol. 2018, 67, 10896–10905. [Google Scholar] [CrossRef]
- Jianyong, Z.; Haiyong, L.; Zili, C.; Zhaohui, L. RSSI based Bluetooth low energy indoor positioning. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, South Korea, 27–30 October 2014; pp. 526–533. [Google Scholar]
- Pu, Y.-C.; You, P.-C. Indoor positioning system based on BLE location fingerprinting with classification approach. Appl. Math. Model. 2018, 62, 654–663. [Google Scholar] [CrossRef]
- Kalbandhe, A.A.; Patil, S.C. Indoor positioning system using bluetooth low energy. In Proceedings of the 2016 International Conference on Computing, Analytics and Security Trends (CAST), Pune, India, 19–21 December 2016; pp. 451–455. [Google Scholar]
- Bai, N.; Tian, Y.; Liu, Y.; Yuan, Z.; Xiao, Z.; Zhou, J. A high-precision and low-cost IMU-based indoor pedestrian positioning technique. IEEE Sens. J. 2020, 20, 6716–6726. [Google Scholar] [CrossRef]
- Li, J.; Gao, W.; Wu, Y.; Liu, Y.; Shen, Y. High-quality indoor scene 3D reconstruction with RGB-D cameras: A brief review. Comput. Vis. Media 2022, 8, 369–393. [Google Scholar] [CrossRef]
- Karam, S.; Lehtola, V.; Vosselman, G. Strategies to integrate IMU and LiDAR SLAM for indoor mapping. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 1, 223–230. [Google Scholar] [CrossRef]
- Chen, L.; Pei, L.; Kuusniemi, H.; Chen, Y.; Kröger, T.; Chen, R. Bayesian fusion for indoor positioning using bluetooth fingerprints. Wirel. Pers. Commun. 2013, 70, 1735–1745. [Google Scholar] [CrossRef]
- Bullmann, M.; Fetzer, T.; Ebner, F.; Ebner, M.; Deinzer, F.; Grzegorzek, M. Comparison of 2.4 GHz WiFi FTM-and RSSI-based indoor positioning methods in realistic scenarios. Sensors 2020, 20, 4515. [Google Scholar] [CrossRef]
- Song, X.; Fan, X.; Xiang, C.; Ye, Q.; Liu, L.; Wang, Z.; He, X.; Yang, N.; Fang, G. A novel convolutional neural network based indoor localization framework with WiFi fingerprinting. IEEE Access 2019, 7, 110698–110709. [Google Scholar] [CrossRef]
- Xie, T.; Jiang, H.; Zhao, X.; Zhang, C. A Wi-Fi-based wireless indoor position sensing system with multipath interference mitigation. Sensors 2019, 19, 3983. [Google Scholar] [CrossRef]
- Sun, H.; Chia, L.G.; Razul, S.G. Through-wall human sensing with WiFi passive radar. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2135–2148. [Google Scholar] [CrossRef]
- Dong, M.; Qi, Y.; Wang, X.; Liu, Y. A non-line-of-sight mitigation method for indoor ultra-wideband localization with multiple walls. IEEE Trans. Ind. Inform. 2022, 19, 8183–8195. [Google Scholar] [CrossRef]
- Gezici, S.; Tian, Z.; Giannakis, G.B.; Kobayashi, H.; Molisch, A.F.; Poor, H.V.; Sahinoglu, Z. Localization via ultra-wideband radios: A look at positioning aspects for future sensor networks. IEEE Signal Process. Mag. 2005, 22, 70–84. [Google Scholar] [CrossRef]
- Wang, W.; Huang, J.; Cai, S.; Yang, J. Design and implementation of synchronization-free TDOA localization system based on UWB. Radioengineering 2019, 27, 320–330. [Google Scholar] [CrossRef]
- Gremigni, O.; Porcino, D. UWB ranging performance tests in different radio environments. In Proceedings of the London Communications Symposium, Toronto, ON, Canada, 5–8 September 2006. [Google Scholar]
- Yu, K.; Wen, K.; Li, Y.; Zhang, S.; Zhang, K. A novel NLOS mitigation algorithm for UWB localization in harsh indoor environments. IEEE Trans. Veh. Technol. 2018, 68, 686–699. [Google Scholar] [CrossRef]
- Kristensen, J.B.; Ginard, M.M.; Jensen, O.K.; Shen, M. Non-line-of-sight identification for UWB indoor positioning systems using support vector machines. In Proceedings of the 2019 IEEE MTT-S International Wireless Symposium (IWS), Guangzhou, China, 19–22 May 2019; pp. 1–3. [Google Scholar]
- Stahlke, M.; Kram, S.; Mutschler, C.; Mahr, T. NLOS detection using UWB channel impulse responses and convolutional neural networks. In Proceedings of the 2020 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020; pp. 1–6. [Google Scholar]
- Jiang, C.; Shen, J.; Chen, S.; Chen, Y.; Liu, D.; Bo, Y. UWB NLOS/LOS classification using deep learning method. IEEE Commun. Lett. 2020, 24, 2226–2230. [Google Scholar] [CrossRef]
- Shaheen, F.; Verma, B.; Asafuddoula, M. Impact of automatic feature extraction in deep learning architecture. In Proceedings of the 2016 International Conference on Digital Image Computing: Techniques and Applications (DICTA), Gold Coast, Australia, 30 November–2 December 2016; pp. 1–8. [Google Scholar]
- Feigl, T.; Nowak, T.; Philippsen, M.; Edelhäußer, T.; Mutschler, C. Recurrent neural networks on drifting time-of-flight measurements. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 206–212. [Google Scholar]
- Li, B.; Hao, Z.; Dang, X. An indoor location algorithm based on Kalman filter fusion of ultra-wide band and inertial measurement unit. AIP Adv. 2019, 9, 085210. [Google Scholar] [CrossRef]
- Liu, F.; Li, X.; Wang, J.; Zhang, J. An adaptive UWB/MEMS-IMU complementary kalman filter for indoor location in NLOS environment. Remote Sens. 2019, 11, 2628. [Google Scholar] [CrossRef]
- Peng, P.; Yu, C.; Xia, Q.; Zheng, Z.; Zhao, K.; Chen, W. An indoor positioning method based on UWB and visual fusion. Sensors 2022, 22, 1394. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Xu, A.; Sui, X.; Wang, C.; Wang, S.; Gao, J.; Shi, Z. Improved-UWB/LiDAR-SLAM Tightly Coupled Positioning System with NLOS Identification Using a LiDAR Point Cloud in GNSS-Denied Environments. Remote Sens. 2022, 14, 1380. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, A.; Sui, X.; Hao, Y.; Zhang, C.; Shi, Z. NLOS Identification-and Correction-Focused Fusion of UWB and LiDAR-SLAM Based on Factor Graph Optimization for High-Precision Positioning with Reduced Drift. Remote Sens. 2022, 14, 4258. [Google Scholar] [CrossRef]
- Feng, D.; Wang, C.; He, C.; Zhuang, Y.; Xia, X.-G. Kalman-filter-based integration of IMU and UWB for high-accuracy indoor positioning and navigation. IEEE Internet Things J. 2020, 7, 3133–3146. [Google Scholar]
- Wang, C.; Xu, A.; Kuang, J.; Sui, X.; Hao, Y.; Niu, X. A high-accuracy indoor localization system and applications based on tightly coupled UWB/INS/floor map integration. IEEE Sens. J. 2021, 21, 18166–18177. [Google Scholar] [CrossRef]
- Yuan, D.; Zhang, J.; Wang, J.; Cui, X.; Liu, F.; Zhang, Y. Robustly adaptive EKF PDR/UWB integrated navigation based on additional heading constraint. Sensors 2021, 21, 4390. [Google Scholar] [CrossRef] [PubMed]
- Venkata Krishnaveni, B.; Reddy, S. Indoor Tracking by Adding IMU and UWB using Unscented Kalman Filter. Available online: https://www.researchsquare.com/article/rs-163258/v1 (accessed on 12 January 2024).
- Kolakowski, M. Comparison of Extended and Unscented Kalman Filters Performance in a Hybrid BLE-UWB Localization System. In Proceedings of the 2020 23rd International Microwave and Radar Conference (MIKON), Warsaw, Poland, 5–7 October 2020; pp. 122–126. [Google Scholar]
- Zhou, N.; Lau, L.; Bai, R.; Moore, T. Novel prior position determination approaches in particle filter for ultra wideband (UWB)-based indoor positioning. NAVIGATION J. Inst. Navig. 2021, 68, 277–292. [Google Scholar] [CrossRef]
- Hu, G.; Gao, B.; Zhong, Y.; Ni, L.; Gu, C. Robust unscented Kalman filtering with measurement error detection for tightly coupled INS/GNSS integration in hypersonic vehicle navigation. IEEE Access 2019, 7, 151409–151421. [Google Scholar] [CrossRef]
- Gao, B.; Hu, G.; Zhong, Y.; Zhu, X. Cubature Kalman filter with both adaptability and robustness for tightly-coupled GNSS/INS integration. IEEE Sens. J. 2021, 21, 14997–15011. [Google Scholar] [CrossRef]
- Long, Z.; Xiang, Y.; Lei, X.; Li, Y.; Hu, Z.; Dai, X. Integrated indoor positioning system of greenhouse robot based on UWB/IMU/ODOM/LIDAR. Sensors 2022, 22, 4819. [Google Scholar] [CrossRef]
- Liu, A.; Lin, S.; Wang, J.; Kong, X. A Succinct Method for Non-Line-of-Sight Mitigation for Ultra-Wideband Indoor Positioning System. Sensors 2022, 22, 8247. [Google Scholar] [CrossRef]
- Fu, J.; Fu, Y.; Xu, D. Application of an adaptive UKF in UWB indoor positioning. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 544–549. [Google Scholar]
- Hu, C.; Huang, P.; Wang, W. Tightly Coupled Visual-Inertial-UWB Indoor Localization System with Multiple Position-Unknown Anchors. IEEE Robot. Autom. Lett. 2023, 9, 351–358. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Z.; Gao, N.; Xiao, Y.; Meng, Z.; Li, Z. Cost-effective wearable indoor localization and motion analysis via the integration of UWB and IMU. Sensors 2020, 20, 344. [Google Scholar] [CrossRef]
- Zheng, S.; Li, Z.; Liu, Y.; Zhang, H.; Zou, X. An optimization-based UWB-IMU fusion framework for UGV. IEEE Sens. J. 2022, 22, 4369–4377. [Google Scholar] [CrossRef]
- Feng, J.; Wang, L.; Li, J.; Xu, Y.; Bi, S.; Shen, T. Novel LiDAR-assisted UWB positioning compensation for indoor robot localization. In Proceedings of the 2021 International Conference on Advanced Mechatronic Systems (ICAMechS), Tokyo, Japan, 9–12 December 2021; pp. 215–219. [Google Scholar]
- Yang, X.; Wang, J.; Song, D.; Feng, B.; Ye, H. A novel NLOS error compensation method based IMU for UWB indoor positioning system. IEEE Sens. J. 2021, 21, 11203–11212. [Google Scholar] [CrossRef]
- Liu, F.; Zhang, J.; Wang, J.; Han, H.; Yang, D. An UWB/vision fusion scheme for determining pedestrians’ indoor location. Sensors 2020, 20, 1139. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| LOS Anchors | 0 and 1 | 0 | 0 and 1 | 0, 1, and 2 | 0 and 2 | 0, 2, and 3 |
| UWB-Only | Odometer | DUKF | |
|---|---|---|---|
| Max (m) | 6.708 | 1.093 | 0.342 |
| Mean (m) | 1.484 | 0.221 | 0.085 |
| RMSE (m) | 0.835 | 0.296 | 0.075 |
| Reference | Sensors | Hardware Cost | LOS/NLOS | Accuracy (cm) |
|---|---|---|---|---|
| [40] | Visual, Inertial, and UWB | High | Moderate NLOS | RMSE: Over 20 |
| [41] | UWB, IMU | Low | Mild NLOS | RMSE: 7.58 |
| [42] | UWB, IMU | Low | LOS | RMSE: 4.0 |
| [37] | UWB, IMU, Odometer, LiDAR | High | Mild NLOS | RMSE: 7–9 |
| [43] | LiDAR, UWB | High | LOS | RMSE: 14 |
| [44] | UWB, IMU | Low | Mild NLOS | Mean error: 12 |
| [45] | Visual, UWB | High | LOS | RMSE: 20 |
| DUKF | UWB, Odometer | Low | Harsh NLOS | RMSE: 7.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, A.; Wang, J.; Lin, S.; Kong, X. A Dynamic UKF-Based UWB/Wheel Odometry Tightly Coupled Approach for Indoor Positioning. Electronics 2024, 13, 1518. https://doi.org/10.3390/electronics13081518
Liu A, Wang J, Lin S, Kong X. A Dynamic UKF-Based UWB/Wheel Odometry Tightly Coupled Approach for Indoor Positioning. Electronics. 2024; 13(8):1518. https://doi.org/10.3390/electronics13081518
Chicago/Turabian StyleLiu, Ang, Jianguo Wang, Shiwei Lin, and Xiaoying Kong. 2024. "A Dynamic UKF-Based UWB/Wheel Odometry Tightly Coupled Approach for Indoor Positioning" Electronics 13, no. 8: 1518. https://doi.org/10.3390/electronics13081518