
Reduction in Voltage Harmonics of Parallel Inverters Based on Robust Droop Controller in Islanded Microgrid

 ,
,  , , ,
, , ,  and
and 
Abstract
:1. Introduction
Literature Review
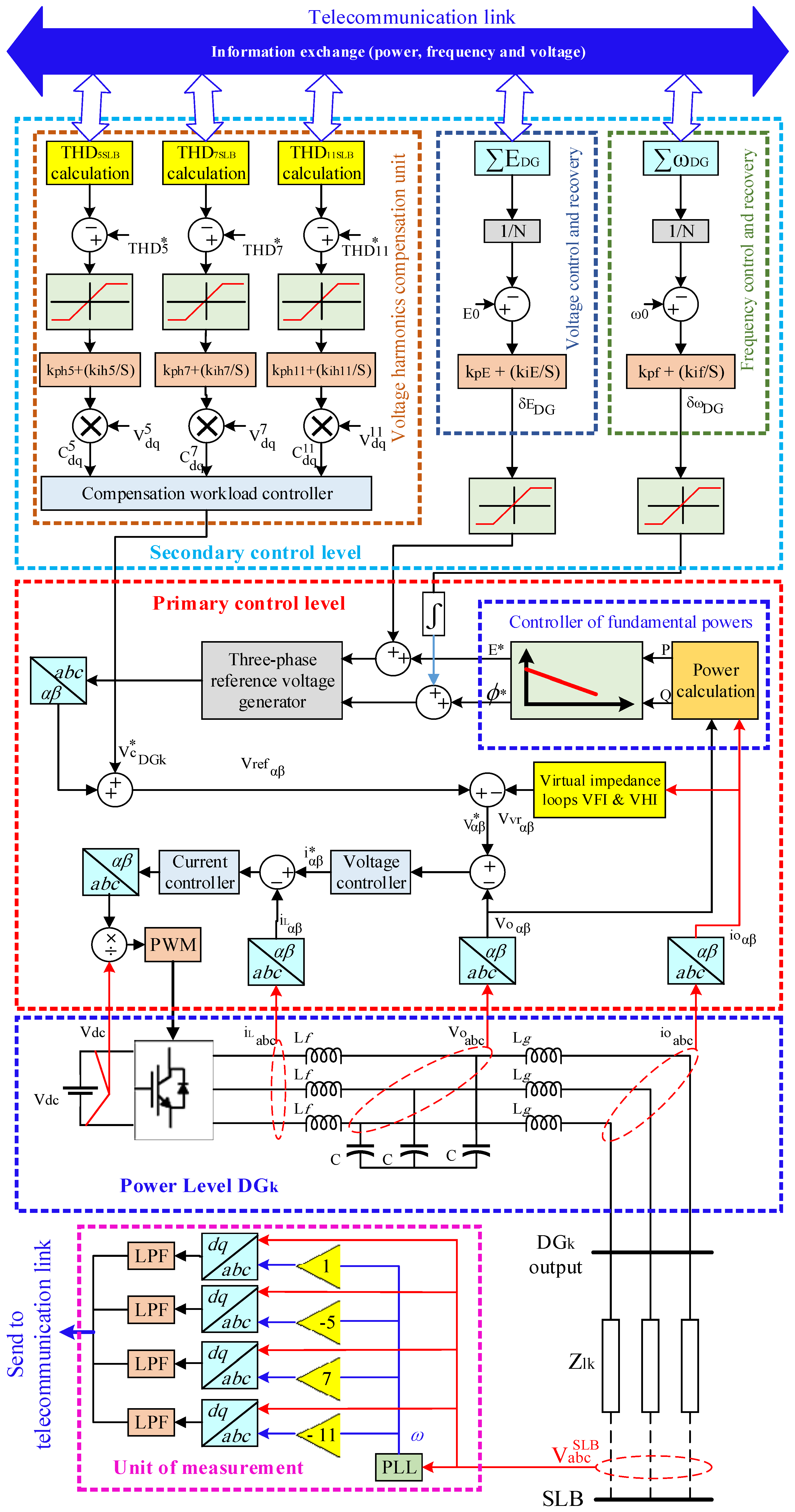
2. Microgrid Control Infrastructure Based on a Primary and Secondary Control
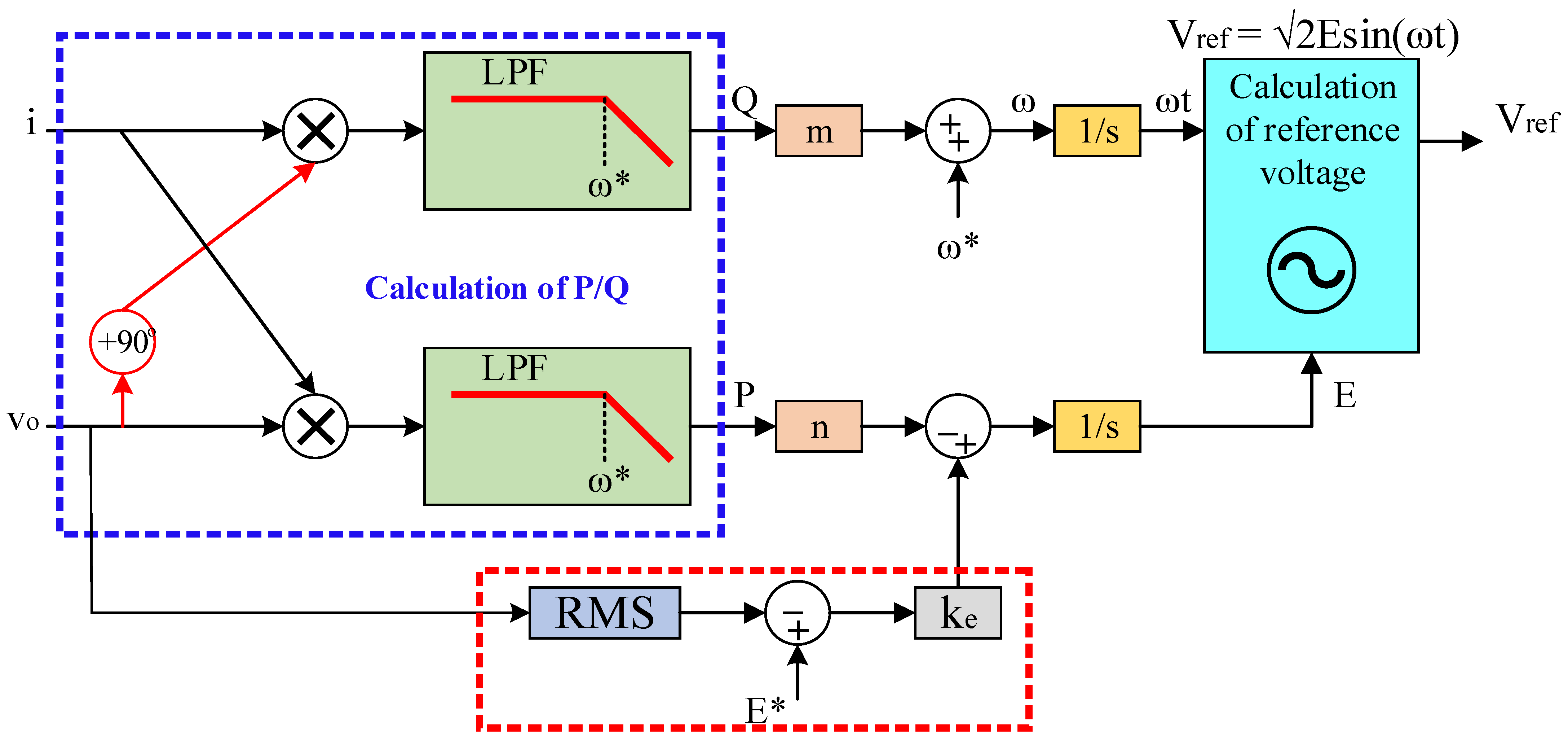
2.1. Primary Control Level of DGs
2.2. Fundamental Frequency Control
2.3. Voltage Control
2.4. Compensation of Microgrid Voltage Harmonics
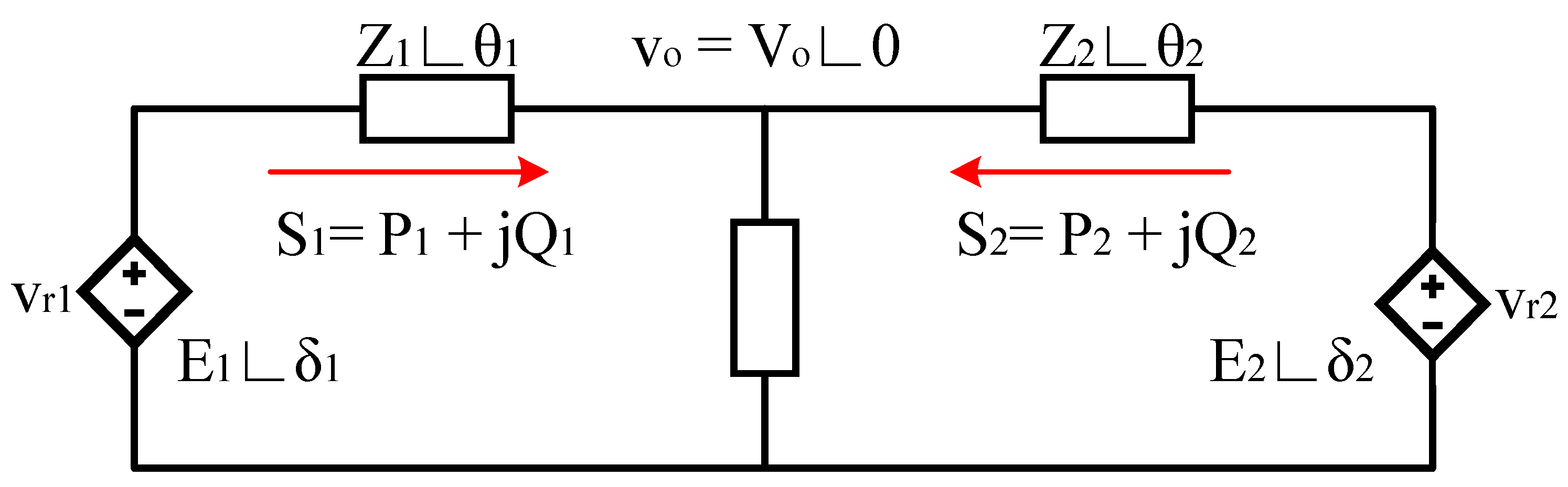
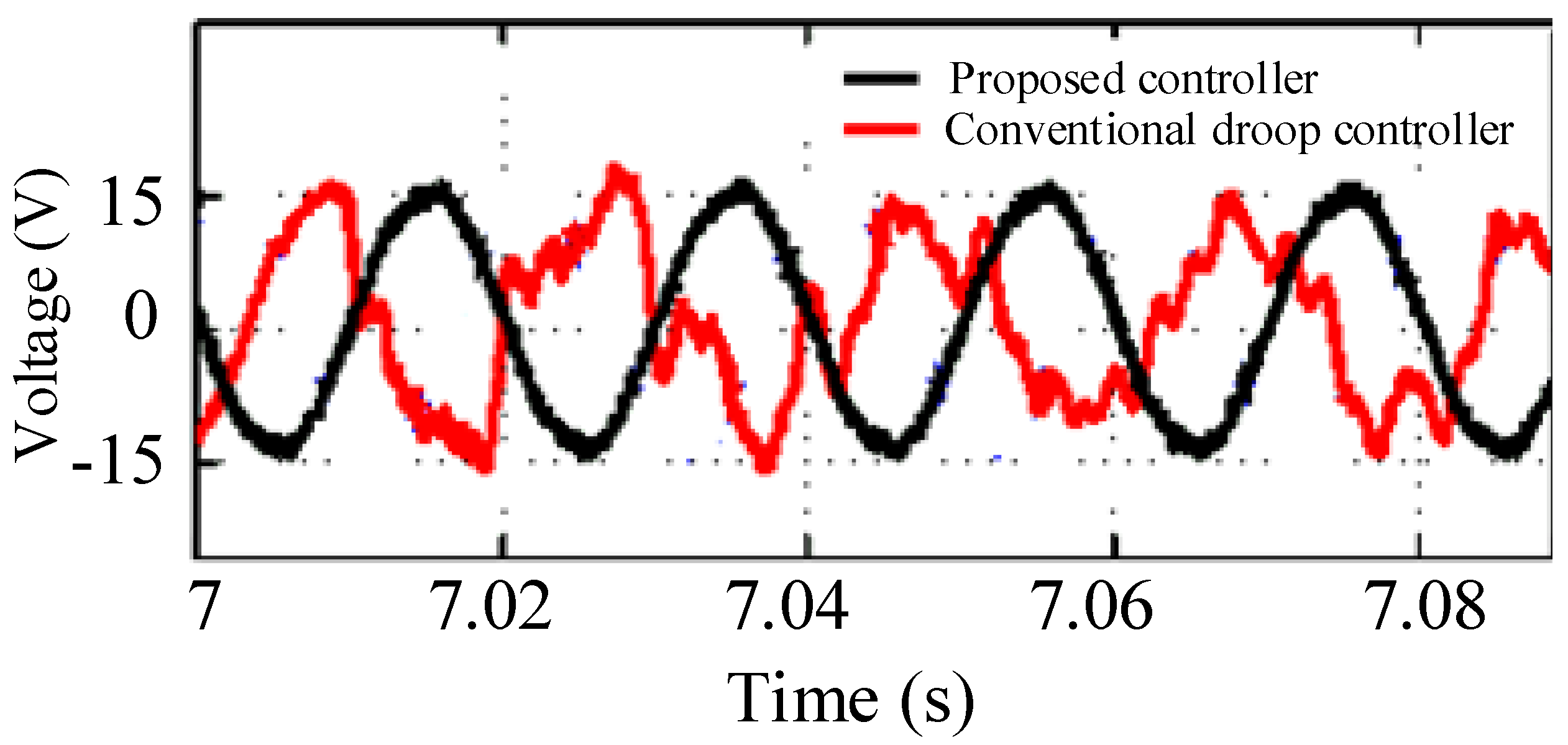
3. The Structure of the Proposed Controller Based on the Modification of the Conventional Droop Controller
- In conventional droop control methods, to accurately share the load between parallel inverters, the inverters must have the same resistive impedances and voltage setpoints, which, in this method, do not need to meet these two conditions.
- With this strategy, the voltage drop caused by the load can be compensated for, and the voltage can be maintained within a certain range.
- The proposed method can be used for mainly inductance/impedance inverters by applying the Q–E and P–ω droop characteristics.
- In the proposed method, the effects of calculation errors, disturbances, and noise are significantly reduced, and the accuracy of power sharing is not affected by the system parameters.
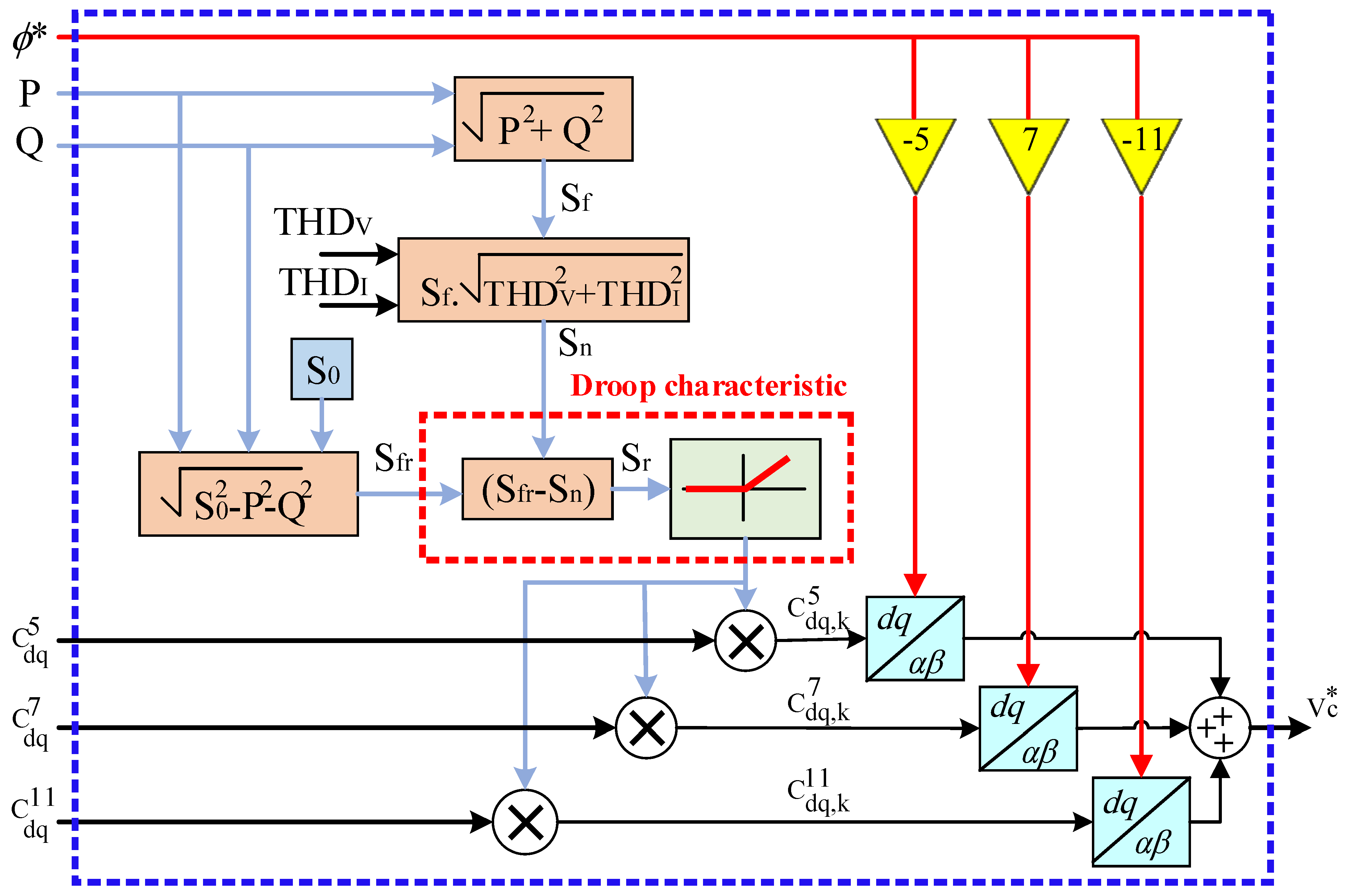
3.1. Harmonic Droop Controller and Voltage Quality Increase
3.2. Combination of Harmonic Drop Controller with Virtual Impedance Loop to Correct the THD
4. Simulation Results
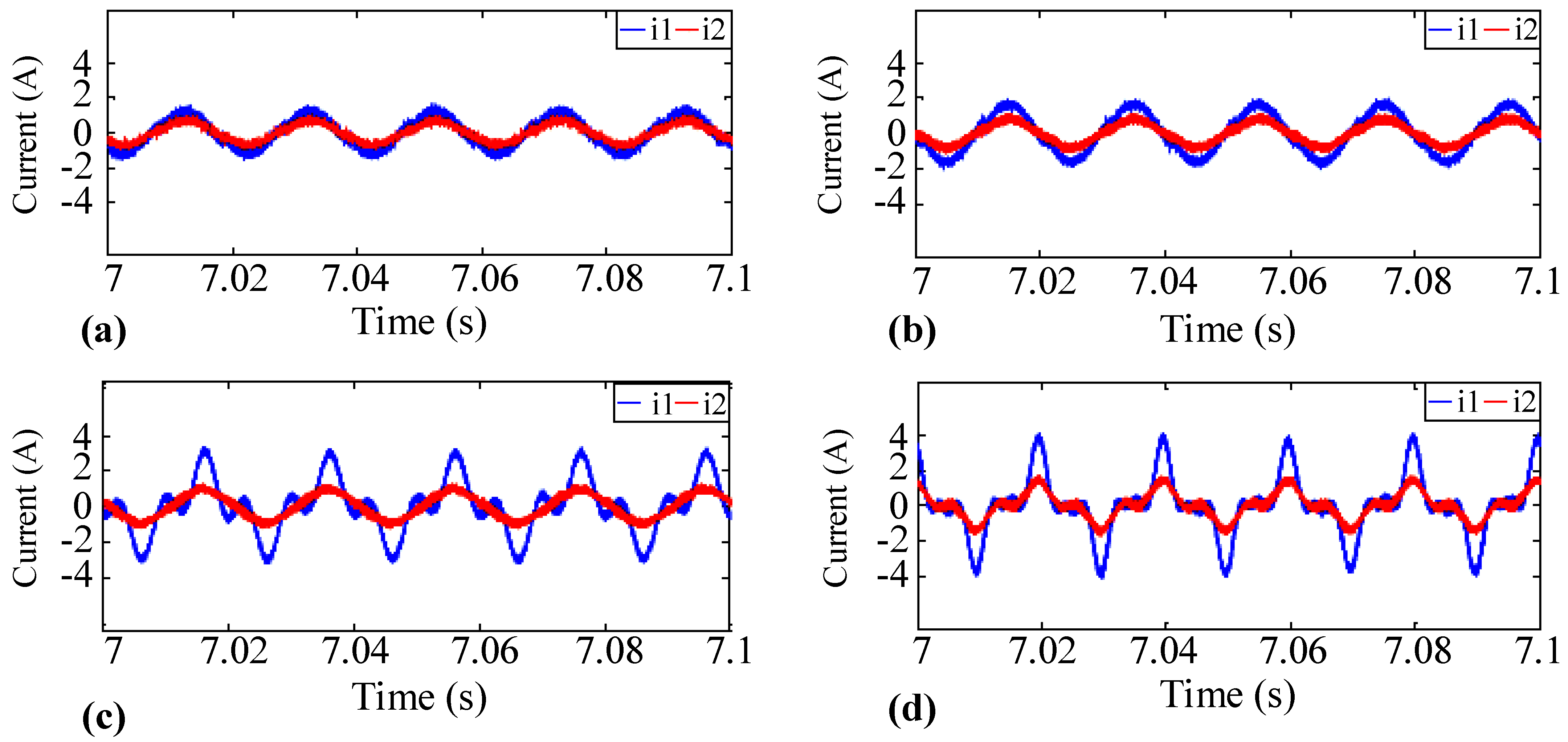
4.1. First Scenario—Strategy 1: Using the Conventional Droop Controller
4.2. First Scenario—Strategy 2: Using a Modified Droop Controller
4.3. First Scenario—Strategy 3: Using a Modified and Harmonic Droop Controller
4.4. First Scenario—Strategy 4: Using the Modified, Harmonic Droop Controller and kR(s) Control Block
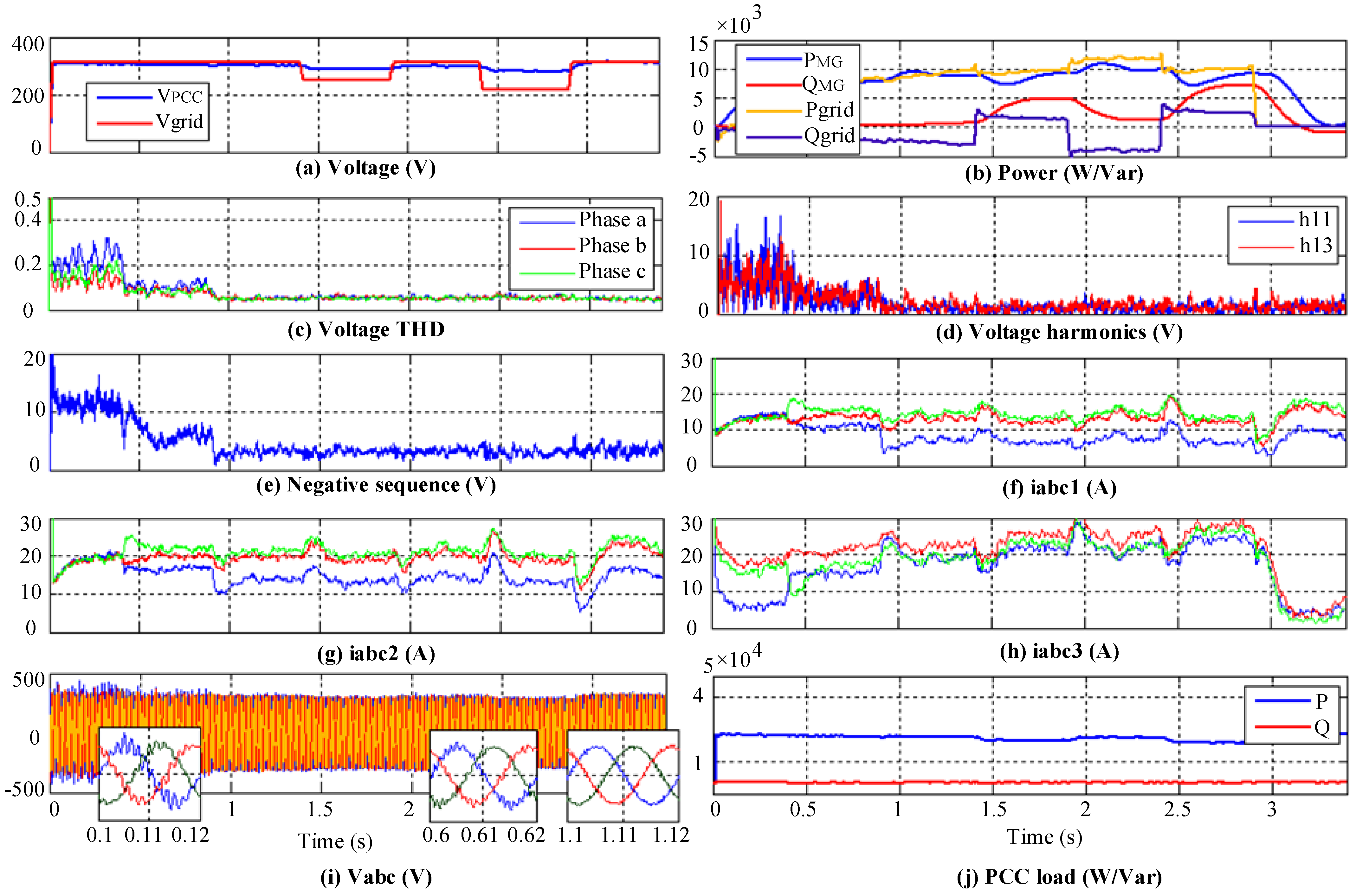
4.5. The Second Scenario: Implementation in Connected and Island Mode from the Grid
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Masoud, D.; Najafi, M.; Esmaeilbeig, M. Calculating the locational marginal price and solving optimal power flow problem based on congestion management using GA-GSF algorithm. Electr. Eng. 2020, 102, 1549–1566. [Google Scholar]
- Masoud, D.; Najafi, M.; Esmaeilbeig, M. Reducing LMP and resolving the congestion of the lines based on placement and optimal size of DG in the power network using the GA-GSF algorithm. Electr. Eng. 2021, 103, 1279–1306. [Google Scholar]
- Daniel, H.; Ratasich, D.; Krammer, L.; Jantsch, A. A methodology for resilient control and monitoring in smart grids. In Proceedings of the 2020 IEEE International Conference on Industrial Technology (ICIT), Buenos Aires, Argentina, 26–28 February 2020; pp. 589–594. [Google Scholar]
- Andrew, D.S.; Alcaraz, C.; Hatziargyriou, N.D. Classifying resilience approaches for protecting smart grids against cyber threats. Int. J. Inf. Secur. 2022, 21, 1189–1210. [Google Scholar]
- Dileep, G. A survey on smart grid technologies and applications. Renew. Energy 2020, 146, 2589–2625. [Google Scholar]
- Hosseinimoghadam, S.M.; Roghanian, H.; Dashtdar, M.; Razavi, S.M. Power-sharing control in an islanded microgrid using virtual impedance. In Proceedings of the 2020 8th International Conference on Smart Grid (icSmartGrid), Paris, France, 17–19 June 2020; pp. 73–77. [Google Scholar]
- Hosseinimoghadam, S.M.; Dashtdar, M.; Dashtdar, M.; Roghanian, H. Security control of islanded micro-grid based on adaptive neuro-fuzzy inference system. Sci. Bull. Ser. C Electr. Eng. Comput. Sci. 2020, 1, 189–204. [Google Scholar]
- Masoud, D.; Dashtdar, M. Voltage and frequency control of islanded micro-grid based on battery and MPPT coordinated control. Int. J. Electr. Comput. Sci. (IJECS) 2020, 2, 1–19. [Google Scholar]
- Shaheed Bin, M.N.; Sozer, Y.; Chowdhury, S.; De Abreu-Garcia, J.A. A novel decentralized adaptive droop control technique for DC microgrids based on integrated load condition processing. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Virtual, 11–15 October 2020; pp. 2095–2100. [Google Scholar]
- Masoud, D.; Nazir, M.S.; Hosseinimoghadam, S.M.S.; Bajaj, M. Improving the sharing of active and reactive power of the islanded microgrid based on load voltage control. Smart Sci. 2021, 10, 142–157. [Google Scholar]
- Zhang, Y.; Qu, X.; Tang, M.; Yao, R.; Chen, W. Design of nonlinear droop control in DC microgrid for desired voltage regulation and current sharing accuracy. IEEE J. Emerg. Sel. Top. Circuits Syst. 2021, 11, 168–175. [Google Scholar] [CrossRef]
- Hosseinimoghadam, S.M.S.; Dashtdar, M.; Dashtdar, M. Improving the sharing of reactive power in an islanded microgrid based on adaptive droop control with virtual impedance. Autom. Control Comput. Sci. 2021, 55, 155–166. [Google Scholar] [CrossRef]
- Saeed, P.; Blaabjerg, F.; Palensky, P. Incorporating power electronic converters reliability into modern power system reliability analysis. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 1668–1681. [Google Scholar]
- Majid, D.; Dashtdar, M. Voltage control in distribution networks in presence of distributed generators based on local and coordinated control structures. Sci. Bull. Electr. Eng. Fac. 2019, 19, 21–27. [Google Scholar]
- Lasantha, M.; Sguarezi, A.; Bryant, J.S.; Gu, M.; Conde, D.R.; Cunha, R. Power system stability with power-electronic converter interfaced renewable power generation: Present issues and future trends. Energies 2020, 13, 3441. [Google Scholar]
- Guo, Y.; Lu, X.; Chen, L.; Zheng, T.; Wang, J.; Mei, S. Functional-rotation-based active dampers in AC microgrids with multiple parallel interface inverters. IEEE Trans. Ind. Appl. 2018, 54, 5206–5215. [Google Scholar] [CrossRef]
- Guo, Y.; Chen, L.; Lu, X.; Wang, J.; Zheng, T.; Mei, S. Region-Based Stability Analysis of Active Dampers in AC Microgrids with Multiple Parallel Interface Inverters. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 1098–1101. [Google Scholar]
- Wang, S.; Liu, Z.; Liu, J.; Boroyevich, D.; Burgos, R. Small-signal modeling and stability prediction of parallel droop-controlled inverters based on terminal characteristics of individual inverters. IEEE Trans. Power Electron. 2019, 35, 1045–1063. [Google Scholar] [CrossRef]
- Helmo, K.M.-P.; Burgos-Mellado, C.; Bonaldo, J.P.; Rodrigues, D.T.; Quintero, J.S.G. Cooperative control of power quality compensators in microgrids. In Proceedings of the 2021 IEEE Green Technologies Conference (GreenTech), Denver, CO, USA, 7–9 April 2021; pp. 380–386. [Google Scholar]
- Jayant, S.; Sundarabalan, C.K.; Sitharthan, R.; Balasundar, C.; Srinath, N.S. Power quality enhancement in microgrid using adaptive affine projection controlled medium voltage distribution static compensator. Sustain. Energy Technol. Assess. 2022, 52, 102185. [Google Scholar]
- Masoud, D.; Flah, A.; El-Bayeh, C.Z.; Tostado-Véliz, M.; Al Durra, A.; Aleem, S.H.A.; Ali, Z.M. Frequency control of the islanded microgrid based on optimized model predictive control by PSO. IET Renew. Power Gener. 2022, 16, 2088–2100. [Google Scholar]
- Naji, A.; Jasim, B.H.; Issa, W.; Anvari-Moghaddam, A.; Blaabjerg, F. A new robust control strategy for parallel operated inverters in green energy applications. Energies 2020, 13, 3480. [Google Scholar]
- Aimée, I.; Saulo, M.J.; Wekesa, C.W. Arctan-Based Robust Droop Control Technique for Accurate Power-Sharing in a Micro-Grid. Eng. Technol. Appl. Sci. Res. 2022, 12, 8259–8265. [Google Scholar]
- Majid, D.; Dashtdar, M. Power control in an islanded microgrid using virtual impedance. Sci. Bull. Electr. Eng. Fac. 2020, 20, 44–49. [Google Scholar]
- Harsh, D.P.; Gandhi, P.; Darji, P. PV-Array-Integrated UPQC for Power Quality Enhancement and PV Power Injection. In Recent Advances in Power Electronics and Drives; Springer: Singapore, 2022; pp. 433–449. [Google Scholar]
- Akhil, G. Power quality evaluation of photovoltaic grid interfaced cascaded H-bridge nine-level multilevel inverter systems using D-STATCOM and UPQC. Energy 2022, 238, 121707. [Google Scholar]
- Masoud, D.; Bajaj, M.; Hosseinimoghadam, S.M.S.; Sami, I.; Choudhury, S.; Rehman, A.U.; Goud, B.S. Improving voltage profile and reducing power losses based on reconfiguration and optimal placement of UPQC in the network by considering system reliability indices. Int. Trans. Electr. Energy Syst. 2021, 31, e13120. [Google Scholar]
- Dahiya, S. Distributed control for DC microgrid based on optimized droop parameters. IETE J. Res. 2020, 66, 192–203. [Google Scholar]
- Ahmet, K.; Seker, M.E. Distributed control of microgrids. In Microgrid Architectures, Control and Protection Methods; Springer: Cham, Switzerland, 2020; pp. 403–422. [Google Scholar]
- Ahmed, J.; Mustafa, M.W.; Rasid, M.M.; Anjum, W.; Ayub, S. Salp swarm optimization algorithm-based controller for dynamic response and power quality enhancement of an islanded microgrid. Processes 2019, 7, 840. [Google Scholar]
- Masoud, D.; Dashtdar, M. Voltage-frequency control (vf) of islanded microgrid based on battery and MPPT control. Am. J. Electr. Comput. Eng. 2020, 4, 35–48. [Google Scholar]
- Amgad, E.S.; Arafah, S.H.; Salim, O.M. Power quality enhancement of grid-islanded parallel microsources using new optimized cascaded level control scheme. Int. J. Electr. Power Energy Syst. 2022, 140, 108063. [Google Scholar]
- He, J.; Du, L.; Yuan, S.; Zhang, C.; Wang, C. Supply voltage and grid current harmonics compensation using multi-port interfacing converter integrated into two-AC-bus grid. IEEE Trans. Smart Grid 2018, 10, 3057–3070. [Google Scholar] [CrossRef]
- Emin, A.M.; Ahmed, S. Control hardware-in-the-loop for voltage controlled inverters with unbalanced and non-linear loads in stand-alone photovoltaic (PV) islanded microgrids. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 2431–2438. [Google Scholar]
- Mousazadeh, M.S.Y.; Jalilian, A.; Savaghebi, M.; Guerrero, J.M. Coordinated control of multifunctional inverters for voltage support and harmonic compensation in a grid-connected microgrid. Electr. Power Syst. Res. 2018, 155, 254–264. [Google Scholar] [CrossRef] [Green Version]
- Alonso, S.; Matheus, A.; Brandao, D.I.; Caldognetto, T.; Marafão, F.P.; Mattavelli, P. A selective harmonic compensation and power control approach exploiting distributed electronic converters in microgrids. Int. J. Electr. Power Energy Syst. 2020, 115, 105452. [Google Scholar] [CrossRef]
- Hadi, A.M.; Gholipour, E.; Hooshmand, R. Voltage quality enhancement in islanded microgrids with multi-voltage quality requirements at different buses. IET Gener. Transm. Distrib. 2018, 12, 2173–2180. [Google Scholar]
- Hussain, E.A.; ElDesouky, A.A.; Omar, A.I.; Saad, M.A. Operation control, energy management, and power quality enhancement for a cluster of isolated microgrids. Ain Shams Eng. J. 2022, 13, 101737. [Google Scholar]
- Maddala, U.; Prasad, A.D. Power Quality Improvement with Multilevel Inverter Based IPQC for Microgrid. Int. J. Mod. Trends Sci. Technol. 2019, 5, 39–43. [Google Scholar]
- Goharshenasan, K.P.; Joorabian, M.; Seifossadat, S.G. Smart grid realization with introducing unified power quality conditioner integrated with DC microgrid. Electr. Power Syst. Res. 2017, 151, 68–85. [Google Scholar]
- Cheng, I.C.; Chen, Y.-C.; Chin, Y.-C.; Chen, C.-H. Integrated power-quality monitoring mechanism for microgrid. IEEE Trans. Smart Grid 2018, 9, 6877–6885. [Google Scholar] [CrossRef]
- Sachin, D.; Singh, B. Performance analysis of solar PV array and battery integrated unified power quality conditioner for microgrid systems. IEEE Trans. Ind. Electron. 2020, 68, 4027–4035. [Google Scholar]
- Nashitah, A.; Raza, S.; Ali, S.; Bhatti, M.K.L.; Zahra, S. Harmonic power sharing and power quality improvement of droop controller based low voltage islanded microgrid. In Proceedings of the 2019 International Symposium on Recent Advances in Electrical Engineering (RAEE), Islamabad, Pakistan, 28–29 August 2019; Volume 4, pp. 1–6. [Google Scholar]
- Yassuda, Y.D.; Vechiu, I.; Gaubert, J.-P. A review of hierarchical control for building microgrids. Renew. Sustain. Energy Rev. 2020, 118, 109523. [Google Scholar]
- Zhirong, Z.; Yi, H.; Zhai, H.; Zhuo, F.; Wang, Z. Harmonic power sharing and PCC voltage harmonics compensation in islanded microgrids by adopting virtual harmonic impedance method. In Proceedings of the IECON 2017-43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 263–267. [Google Scholar]
- Fei, D.; Petucco, A.; Mattavelli, P.; Zhang, X. An enhanced current sharing strategy for islanded ac microgrids based on adaptive virtual impedance regulation. Int. J. Electr. Power Energy Syst. 2022, 134, 107402. [Google Scholar]
- Wang, Z.; Chen, Y.; Li, X.; Xu, Y.; Wu, W.; Liao, S.; Wang, H.; Cao, S. Adaptive Harmonic Impedance Reshaping Control Strategy Based on a Consensus Algorithm for Harmonic Sharing and Power Quality Improvement in Microgrids With Complex Feeder Networks. IEEE Trans. Smart Grid 2021, 13, 47–57. [Google Scholar] [CrossRef]
- Liu, B.; Liu, Z.; Liu, J.; An, R.; Zheng, H.; Shi, Y. An adaptive virtual impedance control scheme based on small-AC-signal injection for unbalanced and harmonic power sharing in islanded microgrids. IEEE Trans. Power Electron. 2019, 34, 12333–12355. [Google Scholar] [CrossRef]
- Zhang, H.; Kim, S.; Sun, Q.; Zhou, J. Distributed adaptive virtual impedance control for accurate reactive power sharing based on consensus control in microgrids. IEEE Trans. Smart Grid 2016, 8, 1749–1761. [Google Scholar] [CrossRef]
- Yu, H.; Awal, M.A.; Tu, H.; Du, Y.; Lukic, S.; Husain, I. A virtual impedance scheme for voltage harmonics suppression in virtual oscillator controlled islanded microgrids. In Proceedings of the 2020 IEEE Applied Power Electronics Conference and Exposition (APEC), New Orleans, LA, USA, 15–19 March 2020; pp. 609–615. [Google Scholar]
- Wu, X.; Shen, C.; Iravani, R. Feasible range and optimal value of the virtual impedance for droop-based control of microgrids. IEEE Trans. Smart Grid 2016, 8, 1242–1251. [Google Scholar] [CrossRef]
- Huang, P.-H.; Vorobev, P.; Al Hosani, M.; Kirtley, J.L.; Turitsyn, K. Plug-and-play compliant control for inverter-based microgrids. IEEE Trans. Power Syst. 2019, 34, 2901–2913. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strategies | Powers | |||
|---|---|---|---|---|
| P1 | P2 | Q1 | Q2 | |
| Strategy 1 | 7.1 | 3.9 | −1.7 | −2.8 |
| Strategy 2 | 11.5 | 5.7 | −4.5 | −2.4 |
| Strategy 3 | 13.7 | 6.9 | −6.4 | −3.2 |
| Strategy 4 | 13.6 | 6.8 | −8 | −4 |
| Strategies | Voltage Quality | |||
|---|---|---|---|---|
| THD | THD3 | THD5 | THD7 | |
| Strategy 1 | 29.85 | 25.5 | 12.75 | 7 |
| Strategy 2 | 29.70 | 25.5 | 12.7 | 7 |
| Strategy 3 | 12.55 | 10.2 | 3 | 5.3 |
| Strategy 4 | 6.37 | 3 | 4 | 2.5 |
| Symbol | Parameter | Value |
|---|---|---|
| E | Grid voltage amplitude | 311 V |
| Vdc | DC link voltage | 650 V |
| Ω* | Grid fundamental frequency | 314 Rad/s |
| Zload, PCC | Load impedance | 20 + j6.5 Ω |
| ZUL | Unbalance load | 50 + j6.5 Ω |
| Lg, L1f | Filter inductance | 0.2, 1.8 mH |
| Fs | Switching frequency | 10 kHz |
| Zl1, Zl2, Zgrid | Line impedance | j0.47, j0.62, j0.3 Ω |
| Rv-1, Rv5, Rv7, Rv11 | Virtual resistance | 9 Ω |
| Cf | Filter capacitor | 25 μF |
| kp, ki | PI controller coefficient | 0.2, 6 W/rd |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alghamdi, S.; Sindi, H.F.; Al-Durra, A.; Alhussainy, A.A.; Rawa, M.; Kotb, H.; AboRas, K.M. Reduction in Voltage Harmonics of Parallel Inverters Based on Robust Droop Controller in Islanded Microgrid. Mathematics 2023, 11, 172. https://doi.org/10.3390/math11010172
Alghamdi S, Sindi HF, Al-Durra A, Alhussainy AA, Rawa M, Kotb H, AboRas KM. Reduction in Voltage Harmonics of Parallel Inverters Based on Robust Droop Controller in Islanded Microgrid. Mathematics. 2023; 11(1):172. https://doi.org/10.3390/math11010172
Chicago/Turabian StyleAlghamdi, Sultan, Hatem F. Sindi, Ahmed Al-Durra, Abdullah Ali Alhussainy, Muhyaddin Rawa, Hossam Kotb, and Kareem M. AboRas. 2023. "Reduction in Voltage Harmonics of Parallel Inverters Based on Robust Droop Controller in Islanded Microgrid" Mathematics 11, no. 1: 172. https://doi.org/10.3390/math11010172