


Online Trajectory Optimization Method for Large Attitude Flip Vertical Landing of the Starship-like Vehicle †

Abstract
:1. Introduction
- (1)
- The coupling relationship between pitch angle and engine nozzle swing angle of a SLV, and the effect of nonlinear aerodynamic forces on the motion of the vehicle are considered. Combining the characteristics of the LAFVL trajectory optimization problem, a planar landing trajectory optimization model considering the pitch attitude is developed. The model can describe the landing motion process of the SLV with high granularity compared with 3-DOF problem [30,31], it significantly improves the computational efficiency compared with 6-DOF problem [32,33].
- (2)
- Based on the above planning model, the research of the low-loss convexification method is carried out to avoid direct linearization leading to large errors [19,20]. We maximize the use of the LCvx method to pre-process nonconvex motion models in order to improve the convergence efficiency and reliability of the subsequently proposed SCvx algorithm. Based on the original SCvx method, an online update strategy of the trust region is used to improve the speed of convergence of the SCvx algorithm.
- (3)
- Using RPM to discretize the continuous optimal control problem, and designing the landing terminal moment as a special control variable to optimize together, which improves the optimality of the moment value and the optimization precision of the trajectory compared with the methods of fixed terminal moment and additional search for the optimal moment [34,35,36].
2. LAFAL Trajectory Optimization Problem for the SLV
3. Convexization and Discretization of Problem
3.1. LCvx of Problem
3.2. Discretization of Problem
3.3. SCvx of Discretization Optimization Problem
3.4. SCvx Algorithm
- Input: set the number of collocation points N; set the initial reference trajectory ; set the initial value of the trust region constraint ; set the iteration termination criterion parameter ; set the maximum number of iterations ; set the number of iterations , .
- Step 1: Solve the linearization convex subproblem using the IPM solver and compute the updates of the optimal variables .
- Step 2: Check the convergence condition , if the convergence condition is satisfied, go to Step 3. Otherwise, set , and return to Step 1.
- Step 3: The optimization problem is solved, .
4. Numerical Experiments
4.1. GPOPS Numerical Optimization Simulation Analysis
- (1)
- By invoking the GPOPS-II software package to solve the nonconvex fuel optimal trajectory optimization problem , the augmented nonconvex fuel optimal trajectory optimization problem and the nonconvex fuel optimal augmented trajectory optimization problem after lossless convexification, the correctness of the current trajectory optimization model design, transformation, and partial convexification is initially verified.
- (2)
- The comparison of the optimization results of and problems shows that using the engine nozzle swing angle rate instead of engine nozzle swing angle as the control quantity uncouples the state quantity pitch angle and the control quantity engine nozzle swing angle, makes the engine nozzle swing angle smoother, and effectively improves the landing precision.
- (3)
- A comparison of the optimization results of the and problems shows that the nonconvex constraint Equation (18) is equivalent to the original nonconvex constraint Equation (11), which does not reduce its nonconvexity, but effectively reduces the constraint dimension without losing the additive characteristic relationship characterizing the pitch angle of the vehicle and the swing angle of the engine nozzle.
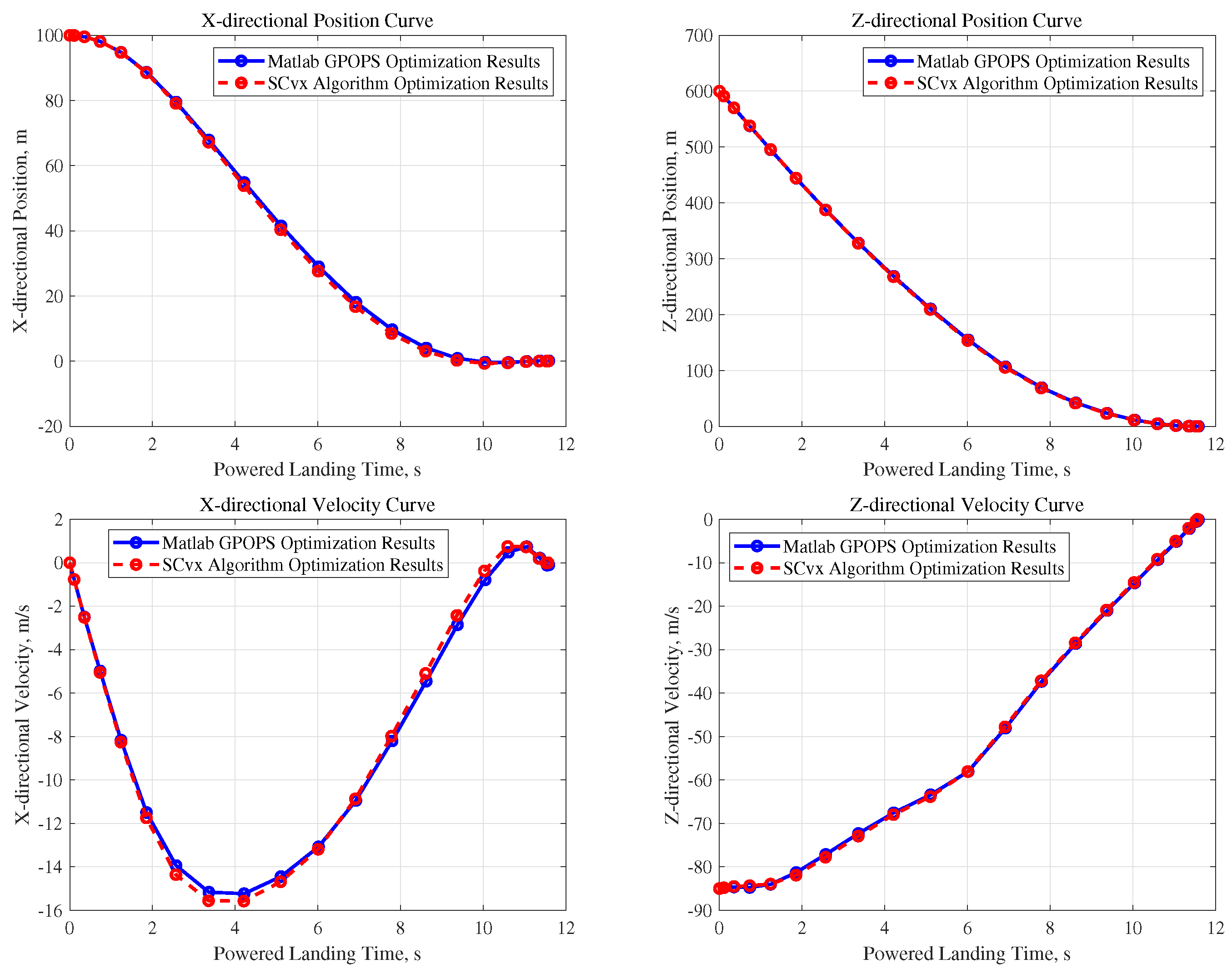
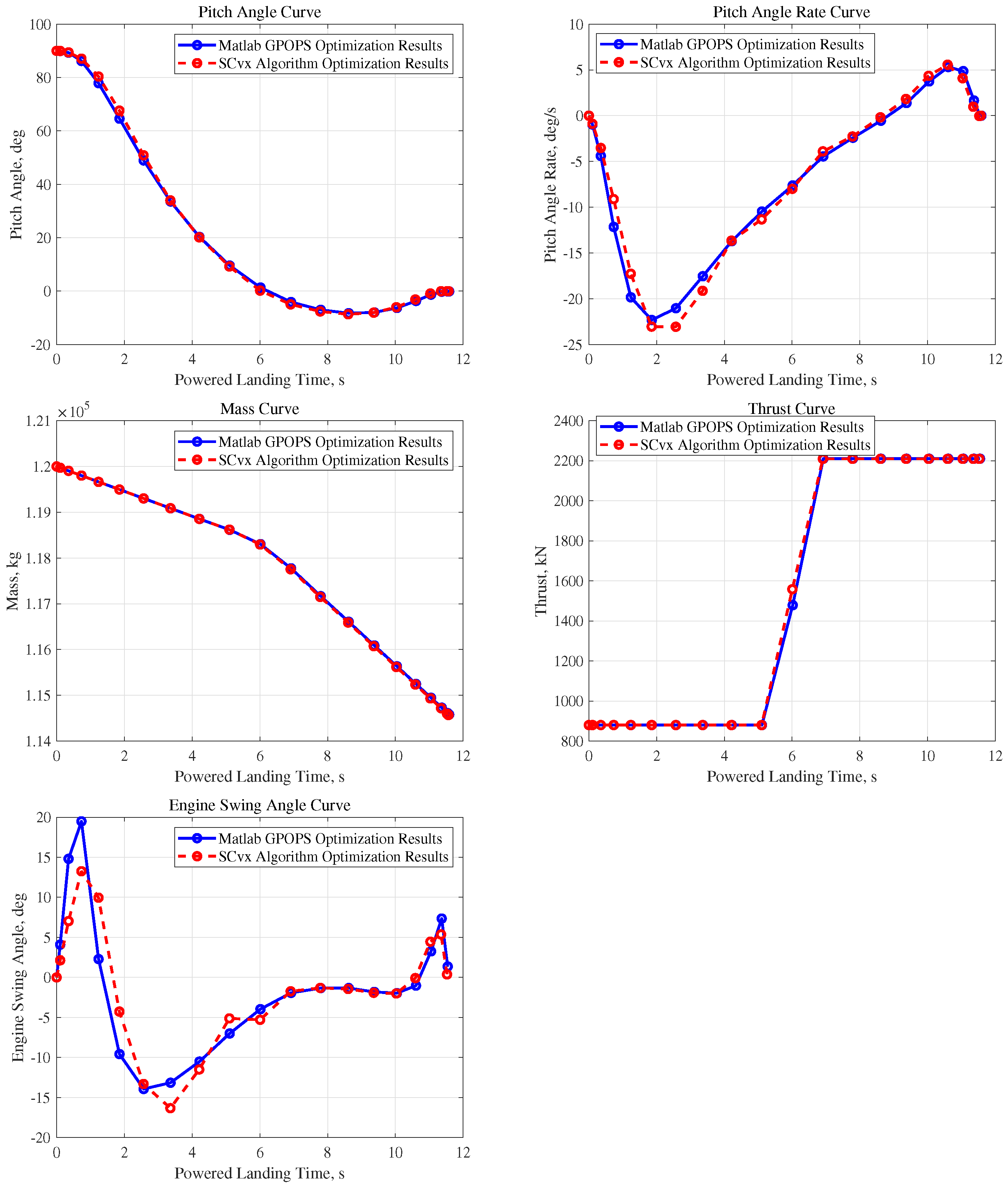
4.2. Hardware in the Loop Simulation Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, S.Q.; Huang, H.; Shao, Y.T.; Huang, B. Study on the requirement trend and development suggestion for China space propulsion system. Astronaut. Syst. Eng. Technol. 2019, 3, 62–70. [Google Scholar]
- Chen, S.Q.; Huang, H.; Zhang, Q.S.; Qin, X.D.; Rong, Y. Research on the development directions of Chinese launch vehicle liquid propulsion system. Astronaut. Syst. Eng. Technol. 2020, 4, 1–12. [Google Scholar]
- Luo, M.; Chen, S.Q.; Li, D.P.; Pan, H. Characteristics of starship propulsion system and numerical simulation of propellant flow during reentry. J. Nanjing Univ. Aeronaut. Astronaut. 2021, 53, 9–16. [Google Scholar]
- Song, Z.Y.; Wang, C. Development of online trajectory planning technology for launch vehicle return and landing. Astronaut. Syst. Eng. Technol. 2019, 3, 1–12. [Google Scholar]
- Chen, Z.H.; Ning, L.; Wang, P. The development of launch vehicle booster recovery technology. Astronaut. Syst. Eng. Technol. 2021, 5, 66–74. [Google Scholar]
- Hu, D.S.; Liu, N.; Liu, B.L.; Yan, N. Analysis on the development of reusable launch vehicles in the United States. Space Int. 2020, 12, 38–45. [Google Scholar]
- Yang, K.; Mi, X. Analysis of the development of SpaceX’s reusable launch vehicle. Space Int. 2020, 9, 13–17. [Google Scholar]
- Yan, N.; Hu, D.S.; Hao, Y.X. Analysis of SpaceX’s “Super HeavyStarship” transportation system scheme. Space Int. 2020, 11, 11–17. [Google Scholar]
- Long, X.D. A brief analysis of the super-heavy-starship transport system and its future impact. Aerosp. Technol. 2021, 8, 32–35. [Google Scholar]
- Cantou, T.; Merlinge, N.; Wuilbercq, R. 3DoF simulation model and specific aerodynamic control capabilities for a SpaceX’s Starship-like atmospheric reentry vehicle. In Proceedings of the 8nd European Conference for Aeronautics and Space Sciences, Madrid, Spain, 1–5 July 2019. [Google Scholar]
- Palmer, C. SpaceX starship lands on Earth, But manned missions to Mars will require more. Engineering 2021, 7, 1345–1347. [Google Scholar] [CrossRef]
- Liu, X. Autonomous Trajectory Planning by Convex Optimization; Iowa State University: Ames, IA, USA, 2013. [Google Scholar]
- Liu, X.; Lu, P.; Pan, B. Survey of convex optimization for aerospace applications. Astrodynamics 2017, 1, 23–40. [Google Scholar] [CrossRef]
- Açıkmeşe, B.; Blackmore, L. Lossless convexification of a class of optimal control problems with non-convex control constraints. Automatica 2011, 47, 341–347. [Google Scholar] [CrossRef]
- Blackmore, L.; Açıkmeşe, B.; Carson, J.M. Lossless convexification of control constraints for a class of nonlinear optimal control problems. Syst. Control. Lett. 2012, 61, 863–870. [Google Scholar] [CrossRef]
- Harris, M.W.; Açıkmeşe, B. Lossless convexification of non-convex optimal control problems for state constrained linear systems. Automatica 2014, 50, 2304–2311. [Google Scholar] [CrossRef]
- Acikmese, B.; Ploen, S.R. Convex programming approach to powered descent guidance for mars landing. J. Guid. Control Dyn. 2007, 30, 1353–1366. [Google Scholar] [CrossRef]
- Cheng, X.; Li, H.; Zhang, R. Efficient ascent trajectory optimization using convex models based on the Newton–Kantorovich/Pseudospectral approach. Aerosp. Sci. Technol. 2017, 66, 140–151. [Google Scholar] [CrossRef]
- Zhang, K.; Yang, S.; Xiong, F. Rapid ascent trajectory optimization for guided rockets via sequential convex programming. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 4800–4809. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, J.; Wang, J. Sequential convex programming for nonlinear optimal control problems in UAV path planning. Aerosp. Sci. Technol. 2018, 76, 280–290. [Google Scholar] [CrossRef]
- Reynolds, T.P. Computational Guidance and Control for Aerospace Systems; University of Washington: Seattle, WA, USA, 2020. [Google Scholar]
- Malyuta, D. Convex Optimization in a Nonconvex World: Applications for Aerospace Systems; University of Washington: Seattle, WA, USA, 2021. [Google Scholar]
- Garg, D. Advances in Global Pseudospectral Methods for Optimal Control; Massachusetts Institute of Technology: Cambridge, MA, USA, 2011. [Google Scholar]
- Darby, C.L. hp-Pseudospectral Method for Solving Continuous-Time Nonlinear Optimal Control Problems; University of Florida: Gainesville, FL, USA, 2011. [Google Scholar]
- Wang, J.B.; Cui, N.G.; Guo, J.F.; Xu, D.F. High precision rapid trajectory optimization algorithm for launch vehicle landing. Control Theory Appl. 2018, 35, 389–398. [Google Scholar]
- Wang, J.B.; Cui, N.G. A pseudospectral-convex optimization algorithm for rocket landing guidance. In Proceedings of the 2018 AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 8–12 January 2018; p. 1871. [Google Scholar]
- Szmuk, M.; Pascucci, C.A.; Dueri, D. Convexification and real-time on-board optimization for agile quad-rotor maneuvering and obstacle avoidance. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 4862–4868. [Google Scholar]
- Zhou, D.; Zhang, Y.; Li, S. Receding horizon guidance and control using sequential convex programming for spacecraft 6-DOF close proximity. Aerosp. Sci. Technol. 2019, 87, 459–477. [Google Scholar] [CrossRef]
- Wang, Z.B. Optimal trajectories and normal load analysis of hypersonic glide vehicles via convex optimization. Aerosp. Sci. Technol. 2019, 87, 357–368. [Google Scholar] [CrossRef]
- Wang, J.B.; Ma, H.J.; Li, H.X.; Chen, H.B. Real-time guidance for powered landing of reusable rockets via deep learning. Neural Comput. Appl. 2022, 1–22. [Google Scholar] [CrossRef]
- Furfaro, R.; Scorsoglio, A.; Linares, R. Adaptive generalized ZEM-ZEV feedback guidance for planetary landing via a deep reinforcement learning approach. Acta Astronaut. 2020, 171, 156–171. [Google Scholar] [CrossRef]
- Gaudet, B.; Linares, R.; Furfaro, R. Deep reinforcement learning for six degree-of-freedom planetary landing. Adv. Space Res. 2020, 65, 1723–1741. [Google Scholar] [CrossRef]
- Xu, X.; Chen, Y.; Bai, C. Deep Reinforcement Learning-Based Accurate Control of Planetary Soft Landing. Sensors 2021, 21, 8161. [Google Scholar] [CrossRef]
- Dueri, D.; Açıkmeşe, B.; Scharf, D.P.; Harris, M.W. Customized real-time interior-point methods for onboard powered-descent guidance. J. Guid. Control Dyn. 2017, 40, 197–212. [Google Scholar] [CrossRef]
- Dueri, D.; Zhang, J.; Açikmese, B. Automated custom code generation for embedded, real-time second order cone programming. IFAC Proc. Vol. 2014, 47, 1605–1612. [Google Scholar] [CrossRef]
- Ren, G.F.; Gao, A.; Cui, P.Y.; Luan, E.J. A rapid power descent phase trajectory optimization method with minimum fuel consumption for Mars pinpoint landing. J. Astronaut. 2014, 35, 1350–1358. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Symbols | Variable Name | Numerical Value |
|---|---|---|
| Initial Mass | 120,000 kg | |
| Dry Weight of The Vehicle | 85,000 kg | |
| Vehicle Altitude | 50 m | |
| Vehicle Radius | 4.5 m | |
| Center of Mass Position | 20 m | |
| Center of Pressure Position | 22.5 m | |
| Maximum Engine Nozzle Swing Angle | 20 deg | |
| Maximum Engine Nozzle Swing Angle Rate | 20 deg/s | |
| Maximum Engine Thrust | 2210 kN | |
| Minimum Engine Thrust | 880 kN | |
| Engine Ratio Impulse | 330 s |
| Optimization Problem | Positional Precision | Velocity Precision |
|---|---|---|
| 2.8273 m | 0.42003 m/s | |
| 0.42707 m | 0.099739 m/s | |
| 0.42708 m | 0.09974 m/s |
| Optimization Procedure | Terminal Moment | Terminal Mass | CPU Time Consumption |
|---|---|---|---|
| SCvx Algorithm | 11.5666 s | 114,568.6 kg | 0.286 s |
| Matlab GPOPS | 11.5666 s | 114,580.7 kg | ∕ |
| Optimization Procedure | Positional Precision | Velocity Precision |
|---|---|---|
| SCvx Algorithm | 0.77127 m | 0.30135 m/s |
| Matlab GPOPS | 0.62173 m | 0.33001 m/s |
| Optimization Procedure | Number of Collocation Points | Positional Precision | Velocity Precision |
|---|---|---|---|
| SCvx Algorithm | 15 | 1.1597 m | 0.29861 m/s |
| 20 | 0.77127 m | 0.30135 m/s | |
| 30 | 0.7097 m | 0.23689m/s | |
| Matlab GPOPS | 15 | 1.1636m | 0.39594 m/s |
| 20 | 0.62173 m | 0.33001 m/s | |
| 30 | 0.42617 m | 0.1531 m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Ma, Z.; Wang, J.; Su, L. Online Trajectory Optimization Method for Large Attitude Flip Vertical Landing of the Starship-like Vehicle. Mathematics 2023, 11, 288. https://doi.org/10.3390/math11020288
Chen H, Ma Z, Wang J, Su L. Online Trajectory Optimization Method for Large Attitude Flip Vertical Landing of the Starship-like Vehicle. Mathematics. 2023; 11(2):288. https://doi.org/10.3390/math11020288
Chicago/Turabian StyleChen, Hongbo, Zhenwei Ma, Jinbo Wang, and Linfeng Su. 2023. "Online Trajectory Optimization Method for Large Attitude Flip Vertical Landing of the Starship-like Vehicle" Mathematics 11, no. 2: 288. https://doi.org/10.3390/math11020288
APA StyleChen, H., Ma, Z., Wang, J., & Su, L. (2023). Online Trajectory Optimization Method for Large Attitude Flip Vertical Landing of the Starship-like Vehicle. Mathematics, 11(2), 288. https://doi.org/10.3390/math11020288