Abstract
This paper proposes a modification of a Sliding Mode Classical Observer (SMCO) to adapt it to the fractional approach. This adaptation involves using a set of definitions based on fractional calculus theory, particularly the approach developed by Riemann–Liouville, resulting in a Sliding Mode Fractional Observer (SMFO). Both observers are used to perform disturbance reconstruction considered additive in a Quadrotor Unmanned Aerial Vehicle (UAV) model. Then, this work presents the fractional-order sliding mode observer’s mathematical formulation and integration into the Quadrotor UAV model. To validate the quality of the disturbance reconstruction process of the proposed SMFO observer scheme, numerical simulations are carried out, where a reconstruction quality indicator (BQR) is proposed based on the analysis of performance indices such as the Mean Square Error (MSE), the First Probability Moment (FPM), and Second Probability Moment (SPM), which were obtained for both the SMCO and the SMFO. The simulation results demonstrate the efficacy of the proposed observer in accurately reconstructing disturbances under various environmental conditions. Comparative analyses with SMCO highlight the advantages of the fractional-order approach in terms of reconstruction accuracy and improvement of its transitory performance. Finally, the presented SMFO offers a promising avenue for enhancing the reliability and precision of disturbance estimation, ultimately contributing to the advancement of robust control strategies for Quadrotor UAV systems.
Keywords:
sliding mode observer; disturbance reconstruction; fractional-order observer; UAV quadrotor mathematical model; reconstruction quality indicator MSC:
93C83; 93-10
1. Introduction
In recent years, the Unmanned Aerial Vehicle (UAV) has garnered considerable attention due to its versatility in performing various tasks in both military and civilian environments. A specific subtype of UAV is the quadrotor, an aerial vehicle equipped with four actuators (also referred to as rotors in the literature). Quadrotors are utilized for various tasks, including search and rescue operations, surveillance, and photography [1,2]. To prevent confusion in the subsequent sections of this paper, the terms UAV and quadrotor will be used as synonyms. The quadrotor requires effective motion control to carry out tasks in environments with high performance and significant autonomy. Therefore, the control system objective on the quadrotor UAV is to follow desired trajectories and enable autonomous movements [3]. Several linear control schemes have been proposed for the quadrotor using Proportional-Integral-Derivative (PID) [4], Linear Quadratic Regulator (LQR) [5], and Linear Quadratic Gaussian (LQG) controllers [6]. Nevertheless, given that the quadrotor is a multivariable nonlinear system influenced by aerodynamic forces, parameter uncertainties, and external disturbances, the efficacy of classical control schemes is constrained [7].
To elevate the performance demands on the quadrotor, several advanced control methods, such as feedback linearization [8], neural network control [9], intelligent control [10], sliding mode control [11], backstepping [12], model predictive control [13], robust optimal control [14], and a fractional-order controller [15], have been proposed. However, advanced controllers require complete information on the quadrotor state variables. Moreover, the increased number of sensors makes the overall system more complex in implementation and expensive in realization. To overcome this problem, various control algorithms using dynamic observers have been proposed [16]. A backstepping controller for the quadrotor using an extended state observer is proposed in [17]. The observer estimates unmeasurable velocity states and distances in translational and rotational dynamics. A robust tracking controller, utilizing feedback linearization and Luenberger observers for state estimation, is applied to the quadrotor as described in [18]. To further reinforce the robustness of the controller, an adaptive estimator is incorporated to estimate the effects of disturbances. In [19], an Unknown Input Observer (UIO) is designed to estimate the Inertial Measurement Unit (IMU) signals. The UIO is used in a fault detection scheme considering external disturbance in the IMU.
Moreover, in [20], a robust observer is proposed to perform actuator fault and state estimations in a quadrotor. The effects of external disturbances, parameter uncertainties, and nonlinear terms are considered in the observer design using a Linear Matrix Inequality (LMI) optimization approach. Han et al. [21] proposed an adaptive control scheme for a quadrotor combined with a filter-based disturbance observer. In this scheme, a set of low-pass filters was used to derive filter outputs and a high-gain observer was designed to estimate uncertainty. Fethalla et al. [22] introduced a robust trajectory tracking controller for a quadrotor, incorporating a nonlinear disturbance observer. This observer was integrated with backstepping and sliding mode control techniques to facilitate tracking the desired position and attitude trajectories for the quadrotor. The results of the proposed scheme demonstrated superior performance compared to the control approach that did not employ the nonlinear disturbance observer.
On the other hand, the use of Sliding Mode Observers (SMOs) for estimating states and disturbances in a quadrotor is presented in [23]. Also, in [24], a sliding mode control law was designed to compensate for the estimated disturbance in real time, aiming to achieve attitude control and enhance the quadrotors’ ability in precision agriculture. In addition, in this work, a high-order SMO is used with a feedback linearization-based controller to improve the performance of the motion control subject to disturbance. Therefore, SMOs have become increasingly popular for controlling UAVs due to their numerous benefits. Firstly, they facilitate robust estimation of the system’s state and disturbances, effectively handling unknown disturbances and measurement noise. Secondly, SMOs contribute to an improved control performance, providing valuable information for designing control strategies that enhance trajectory tracking, stability, and the quadrotor’s response speed. Lastly, the robustness of SMOs to uncertainties in the system parameters and operating conditions makes quadrotor systems more adaptable to different situations, especially in dynamic and variable environments [22,23,25,26].
Recently, it has been shown that many dynamic systems can be better characterized using non-integer order dynamic models, achieved via fractional calculus, as opposed to traditional calculus [27]. In the literature, several works have addressed the control problem of dynamic systems using Fractional Order Control (FOC) [28,29,30]. FOCs have demonstrated superior performance in many control systems compared to controllers designed using the traditional approach [31]. In [32], fractional calculus is incorporated with the observer’s gain, providing an improved solution that effectively balances anti-noise capabilities with control performance considerations for disturbance rejection in hypersonic vehicles. In [33], a combination of disturbance observer-based control and fractional-order control is employed to enhance robustness and performance. This approach is specifically applied in the presence of nonlinearities, uncertainties, and external perturbations to stabilize nonlinear vibrations in fractional-order arch MEMS resonators. In [34], a sliding surface incorporating both integer and fractional-order derivatives is proposed to enhance the quadrotor’s attitude-tracking performance. Furthermore, the global sliding mode control approach grounded in fractional calculus enhances the system response speed and robustness while offering a more adaptable controller structure than the conventional sliding mode controller [35]. This effectiveness holds even in the presence of disturbances and complex trajectories. This has originated an interest in applying FOC to systems subject to uncertainties and disturbances, such as the quadrotor. Therefore, this research proposes to modify a Sliding Mode Classical Order observer (SMCO) by adapting it to the fractional calculus approach using a set of definitions based on the Riemann–Liouville sense. Consequently, in this work, the following contributions are addressed: (a) present a novel Sliding Mode Fractional Order observer (SMFO), (b) present a comparison of the performance of the reconstruction of perturbations of the linear model of a UAV quadrotor type focusing on its transitory response of the SMFO compared with the SMCO, and (c) propose a reconstruction quality indicator (Best Quality of Reconstruction BQR) based on the analysis of performance indices such as the Mean Square Error (MSE), the First Probability Moment (FPM), and the Second Probability Moment (SPM) obtained for both observers, which allows for validating the accuracy of the disturbance reconstruction and the improvement in the transient response provided via the SMFO over the SMCO, as well as for determining their future applicability in physical implementations.
This paper is organized as follows: Section 2 presents the non-linear and linear dynamical model of a UAV, which will support the validation of the reconstruction of disturbances carried out via the analyzed observers, SMCO and SMFO. Section 3 presents the design of the SMFO observer as one of the main results, which has been obtained by proposing the modification of an SMCO based on a fractional approach for the estimation of states and the reconstruction of additive disturbances to the system. Section 4 presents the validation and discussion of the results based on numerical simulations of the application of both observers (SMCO and SMFO) to the UAV model via the proposed quality indicator (Best Quality of Reconstruction BQR). Finally, the conclusions are presented in Section 5.
2. UAV Mathematical Modeling
2.1. UAV Kinematics
This section deals with the mathematical description of a quadrotor-type Unmanned Aerial Vehicle (UAV) model. The UAV has four actuators, and by manipulating these, the possible movements that can be made are defined: (a) Pitch movement, which allows the UAV to move along the x axis. For this, the drone must increase the angular velocity in rotor 1, reduce the angular velocity of rotor 3, and maintain a medium velocity in rotors 2 and 4, generating the torque (see Figure 1). When performing these actions, an inclination of the drone is generated, and consequently, the angle is generated. (b) Roll movement, which allows the quadrotor to move along the y axis. For this, the drone must increase the angular velocity in rotor 2, reduce the angular velocity of rotor 4, and maintain an intermediate velocity in rotors 1 and 3, generating the torque . When performing these actions, an inclination of the UAV is generated, and consequently, the angle is generated. (c) Yaw movement, which is generated in the vertical plane of the quadrotor. To generate this movement, the angular velocity of rotors 1 and 3 must be varied equally, and the angular velocity of rotors 2 and 4 must be decreased (or increased) equally, generating the torque . Consequently, the UAV tends to rotate around its center of mass, generating the angle . It is important to mention that the slightest inclination in the angles of the UAV can complicate the altitude, compromising the system’s stability.
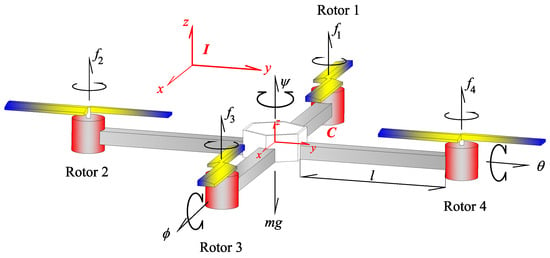
Figure 1.
UAV quadrotor kinematics and frames of reference.
Considering the above, it is helpful to define how the orientation of the quadrotor is represented mathematically. It should be noted that the UAV is subject to the reference frames C and I (see Figure 1). In this sense, C represents the non-inertial reference frame, that is, a coordinate axis whose center is the center of mass of the quadrotor, and I represents the inertial reference frame, which is attached to the earth’s surface (platform from where the UAV starts its navigation).
On generating the pitch , roll , and yaw angles, it is possible to modify the spatial position of the drone. The movements described above must be controlled simultaneously in order for the quadrotor to follow the particular trajectories assigned via a flight plan.
The non-linear dynamic model of the UAV is taken from [36], where it is presented in detail, and it is specified that the dynamics of the UAV are defined by combining translational and rotational dynamics, resulting in the following mathematical model:
where represent the inertial parameters and m the quadrotor mass. The inputs to the model are defined by (2):
with l representing the length of the arms of the UAV, g the acceleration due to gravity, u the thrust that defines the input to the translational dynamics, and the torques , and representing the inputs to the rotational dynamics [36]. Finally, the forces generated by each one of the rotors incorporated into the quadrotor are defined as:
From (3), it follows that represents the angular velocity of each rotor and is a proportionality constant.
2.2. UAV State-Space Model
The UAV quadrotor model described above in (1) and (2) can be represented in a state-space form as follows:
Then, the states’ vector , is defined as can be seen in Table 1:

Table 1.
State-space variables definition.
Considering the state vector previously defined, the non-linear state-space model of the quadrotor is expressed as follows:
where:
The values given in Table 2 are considered for the numerical simulation of the UAV.
Table 2.
UAV model parameters.
2.3. UAV Mathematical Model Linearization
The non-linear model of the quadrotor expressed by (5) and (6) has been linearized around its equilibrium point defined as . Thus, the linear representation of the non-linear model is derived and expressed alternatively in the generalized state-space form as defined by (7).
where is the state vector, is the output vector, and is the input vector. is the system matrix, is the input matrix, is the output matrix, and is the input distribution matrix. The coefficients of the matrices , , , and are obtained from the linearized state-space model expressed in the continuous time domain, as shown in (8).
The linear model given in expression (8) has been discretized using the z-transform with a sampling period of 25 ms. This sampling period was chosen based on the technical specifications of synchronous communication operations of commercial sensors and the experiments reported in [36], where a real-time simulation of a quadrotor is discussed. Thus, the equivalent discrete-time domain linear model is defined as (9).
The matrix coefficients that define the state-space linearized model expressed in the discrete-time domain are:
where the elements of matrix are given by , , , .
Therefore, in simulating the quadrotor model and the observers discussed in Section 3, the discrete matrices , , , and are used. This yields an approximate dynamic response, contrasting with that obtained when considering the continuous event system defined in (8). In this context, minimizing approximation errors may be achievable by opting for a shorter sampling period. However, notice that this could compromise sensor interaction when an implementation is required.
3. Main Results
This Section introduces a Sliding Mode Classical Observer (SMCO) designed with the parameters derived from the dynamic matrices of the quadrotor linear model, as detailed in the preceding section. Subsequently, we adapt and modify the SMCO to incorporate a fractional approach, resulting in a Sliding Mode Fractional Observer (SMFO). This development stands as the primary contribution of this research.
3.1. Sliding Mode Classical-Observer (SMCO) Desing
The principal purpose of a state observer is to estimate the non-measurable states of a dynamical system based only on the measured outputs and inputs of the system. An observer is a mathematical replica of the system driven by the system input and the difference between the system’s outputs and the observer’s outputs, named output estimation error. The output estimation error’s signal feedback into the observer is used as a corrective term to enable the observer states to converge to the system states.
In linear observers, the output estimation error is sent as feedback linearly into the observer. This type of observer, however, is unable to force the output estimation error to zero in the presence of disturbances or uncertainties in the system, and consequently, the observer states will not converge to the system states. Unlike a linear observer, a sliding mode classical observer (SMCO) fed back the output estimation error using a nonlinear function, providing two advantages. Firstly, the SMCO can force the output estimation error to zero in a finite time, even in the system’s presence of disturbances or uncertainties. Therefore, the observer states converge asymptotically to the system states. Secondly, once the output estimation error is forced to zero, it is said that a sliding motion occurs. During the sliding motion, the nonlinear output estimation signal injected into the SMCO contains information about the unknown signals (disturbances or uncertainties) affecting the system. Using a suitable filtering process on the nonlinear output estimation error, disturbance signals can be reconstructed [37].
To perform the disturbances’ reconstruction, two conditions are required. First, bounded disturbances are required, and second, the disturbances should meet the matching condition. Therefore, this subsection addresses the problem of bounded disturbance reconstruction acting in the input channels of the quadrotor by designing an SMCO. A classical methodology for the design of an SMCO considers the linear dynamical model, subject to disturbances acting in the input channel, described as follows:
where is the vector state, are the measured outputs, and are the system inputs. is the parameters’ matrix, is the input matrix, is the output matrix, and is an input distribution matrix. Assume that the matrices , , and are the full rank and the function represents a disturbance which is assumed to be bounded so that with .
It is assumed that the dynamical system given in (11) and (12) satisfies the following two conditions: and the invariant zeros of the triple (, , ) must lie in .
Under the above conditions exist a linear change in coordinates such that the model of the system can be rewritten as:
where denotes the non-measurable states and denotes the measured states. is the identity matrix and has stable eigenvalues. The transformation of coordinates is used to rewrite the system model in a new coordinate system that facilitates the SMCO design. The transformed model of the system given by (13) and (14) will be used as a basis for the design of an SMCO. The observer structure that will be considered can be written in the form:
where is a stable design matrix and the discontinuous signal , is given as:
where is a symmetric positive definite Lyapunov matrix for .
Defining both the state estimation error and the output estimation as and , respectively, the dynamical of the error is given by:
Edwards and Spurgeon in [37] show that the error dynamics given by (18) is quadratically stable. Therefore, both and are forced to zero once the error dynamic achieves the sliding motion in finite time. The SMCO given by (15) and (16) can be more conveniently expressed in terms of the original coordinates of the system as:
where the matrices and are the linear and nonlinear gains of the SMCO given by:
To calculate the gains and of the SMCO, it is necessary to utilize the coordinate transformation , which maps the system’s dynamics into the specific form given by (13) and (14). Then, is the output estimation error injection term, which is a nonlinear discontinuous signal defined as:
where now the state estimation error is defined as and the scalar is chosen so that with . To address the problem of quadrotor disturbance reconstruction, the robustness properties of the SMCO are used. Therefore, when a sliding motion is attained, both and are forced to zero in finite time. Then, the dynamics of error in (18) becomes:
Since the matrix is stable, it follows that with which . Therefore, the disturbance information is contained in the signal . Due to being a high-frequency signal, one way to recover the dynamics of the disturbance is by using a filtering process. To demonstrate this, it is proposed to apply a low-pass filter implemented via the first-order differential equation given by (24) to each component of the nonlinear function .
with , where is the i- low-frequency component of the signal , which provides an accurate estimate of the disturbances acting on the input channel of the system, and is the filter time constant. Figure 2 shows the architecture of the SMCO proposed for disturbance reconstruction.
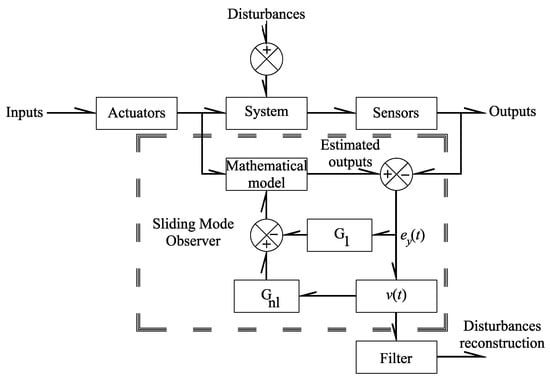
Figure 2.
Sliding Mode Classical Observer (SMCO) architecture for disturbance reconstruction.
To achieve a sliding motion even in the presence of disturbances, it is only required that the magnitude of the disturbance is bounded and that it satisfies the matching condition. Therefore, when the SMCO achieves the sliding motion and attains the convergence of the state estimation error to zero, the disturbances are estimated via the low-frequency component of the observer’s signal . This enables the observer to recover information about the disturbances affecting the system while simultaneously achieving an accurate estimation of the states despite the presence of disturbances or uncertainties in the system.
It is important to mention that in this work, it is assumed that all the quadrotor model’s state variables are measurables, with which the rank of the matrix is n (i.e., ), Therefore, in this special case, the matrices , and are empty matrices, and the rest of the matrices are given as:
where the elements of the matrix are given by: , , and .
with these matrices, the matrix is obtained, which is shown below:
where the elements of the matrix are given by: , , and .
For the matrix is required the matrix, then:
This gives rise to the required matrix based on (21), which is shown in (29).
To obtain the output estimation error injection term , we refer to (22), where the matrices and are given by:
where the elements of the matrix are given by , , , , , , , , , , , . It is worth mentioning that the value of is considered greater than the norm of the disturbance amplitude to be reconstructed. Additionally, the value of for (24) is considered to be .
3.2. Sliding Mode Fractional-Observer (SMFO) Design
In this section, a Sliding Mode Classical Observer (SMCO) is modified, adapting to the Riemann–Liouville fractional calculus approach. This modification allows for obtaining a new observer called the Sliding Mode Fractional Observer (SMFO). This allows for highlighting the advantages that can be presented and discerning possible improvements in the transient response of state estimation and disturbance reconstruction compared to the SMCO observer. To validate this modification, the following section presents numerical simulations applied to the model of a quadrotor-type UAV, where the results are evaluated using performance indices.
To carry out the adaptation of the SMCO to the proposed SMFO, as a first step, it is important to consider the following fractional calculus definitions:
Definition 1.
The iterated Cauchy integral of order is defined by the following expression:
Definition 2.
The Euler’s Gamma function is one that generalizes the factorial concept and extends it to the real numbers set. This function is described by the following expression:
The following expressions define some of the fundamental properties of the Euler’s Gamma function:
When considering the definition and properties of Euler’s Gamma function in the Cauchy iterated integral, the fractional-order integral operator described by Definition 3 is defined.
Definition 3.
The Riemann–Liouville integral operator of order with is defined as:
where is the Euler’s Gamma function and .
As a second step, considering the previous definitions and the properties of the Gamma function, the sliding mode classical observer SMCO is modified to adapt its integral effect in a sense described by (35) in the SMFO observer as shown in (40). For this purpose, the following methodology must be addressed.
As a next step, based on the aforementioned fractional approach and considering the classical observer dynamics given by (19), a new state vector and output estimation are obtained. In this sense, the estimation error of the SMFO is defined as:
such that,
Therefore, the general structure of the SMFO is proposed analogously to the classical observer SMCO to guarantee that , such that:
where and are appropriate gain matrices given in (20) and (21) and , which is defined as:
Finally, the state vector estimation achieved via the sliding mode fractional observer SMFO based on the Riemann–Liouville integral operator (Definition 3) proposed in this work is carried out as follows:
4. Results Validation and Discussion
This section presents the numerical simulation results carried out in the MATLAB R2022b® software of the comparison between the SMCO and the SMFO applied to the UAV linearized model given by (7) to (10) described in Section 2. For this purpose, the UAV model parameters denoted in Table 2 are considered. These simulations intend to illustrate the performance and possible improvements in the transient behavior of the reconstruction of the additive disturbances when the proposed SMFO approach is applied, and then compare it with the SMCO performance. Therefore, for the validation and quantitative and qualitative analysis of the obtained reconstruction results, the Best Quality of Reconstruction (BQR) indicator is proposed based on three performance indices: the Mean Square Error (MSE), the First Probability Moment (FPM), and the Second Probability Moment (SPM).
4.1. Comparison of the Disturbance Reconstruction SMFO vs. SMCO
To evaluate the performance of the proposed observer SMFO, non-zero initial conditions and perturbations , y acting on the UAV linear model are considered. These disturbances are bounded-time and additive signals that are applied to the input channels of the UAV, which are defined as follows:
- : bounded-magnitude sinusoidal signal.
- : bounded-magnitude square signal.
- : bounded-magnitude sawtooth signal.
These signals represent the variability of disturbances applied to the UAV model. These disturbances can arise from multiple sources, such as atmospheric turbulence, sudden changes in payload, weather variations, gusts of wind, and altitude changes. The nature and intensity of these disturbances can significantly affect the trajectory, stability, and performance of the UAV.
The results of the disturbance reconstructions obtained via the SMCO for , and , are shown in Figure 3, Figure 4 and Figure 5, respectively. Concerning Figure 3, Figure 4 and Figure 5, it can be appreciated that the disturbances’ reconstruction has a convergence time of . However, focusing on the disturbances’ reconstruction and , oscillatory behaviors are perceived to arise in the time intervals and , respectively. Note that these oscillatory behaviors are undesirable behaviors in dynamic systems since they could, at any moment, saturate the sensors and actuators during implementation.
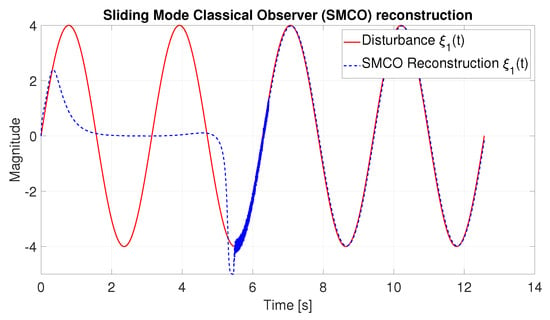
Figure 3.
Disturbance reconstruction of using the SMCO approach.
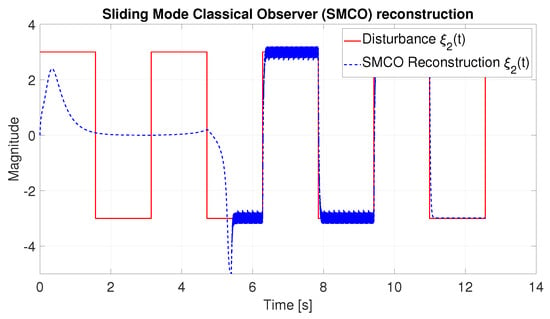
Figure 4.
Disturbance reconstruction of using the SMCO approach.
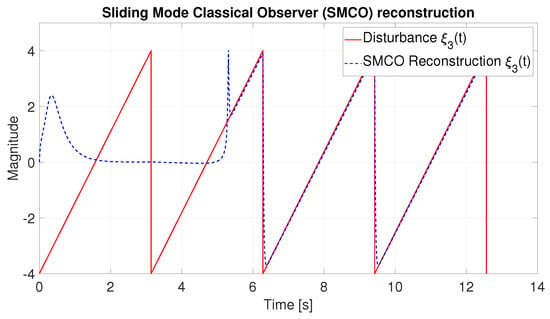
Figure 5.
Disturbance reconstruction of using the SMCO approach.
Similarly, Figure 6, Figure 7 and Figure 8 show the results of the disturbances’ reconstructions obtained via the SMFO. When analyzing these results, it can be specified that, for all cases, signals without oscillations (desired dynamics to avoid saturations in the UAV sensors and actuators during implementation) have been obtained.
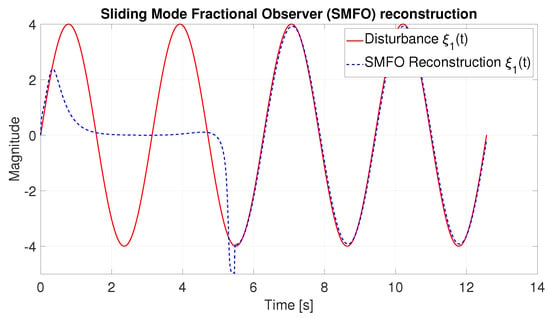
Figure 6.
Disturbance reconstruction of using the proposed observer SMFO.
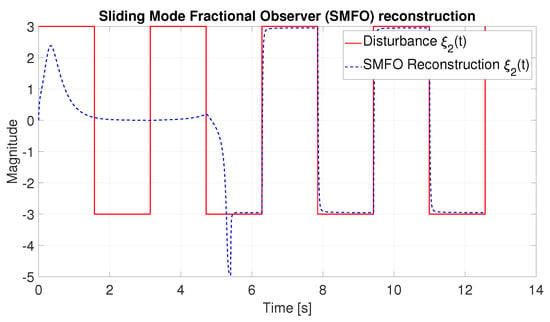
Figure 7.
Disturbance reconstruction of using the proposed observer SMFO.
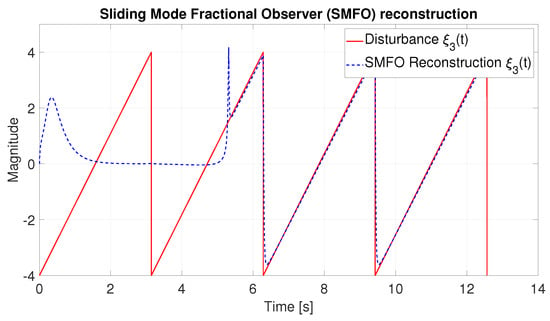
Figure 8.
Disturbance reconstruction of using the proposed observer SMFO.
It is worth mentioning that the reconstructions carried out via the SMCO and the SMFO are based on the estimation of the state variables, so if the disturbance reconstruction indicates convergence, the estimated states also converge. However, it should be noted that the reconstructions obtained via the SMFO denote a better convergence with the original disturbances than the results obtained using the SMCO since the latter is susceptible to generating oscillations.
4.2. Discussion
In order to highlight one of the contributions of this work, Figure 9, Figure 10 and Figure 11 show superimposed results of the disturbances’ reconstruction of , , and carried out via the SMCO and the SMFO. These figures illustrate that both reconstructions have the same convergence time. However, the SMCO, in most cases, tends to generate oscillations. Therefore, it is necessary to use performance indices that describe the efficiency of each approach. Hence, it is proposed to quantitatively and qualitatively determine the performance of the disturbance reconstruction process via the Mean Square Error MSE, First Probability Moment FPM, and Second Probability Moment SPM.
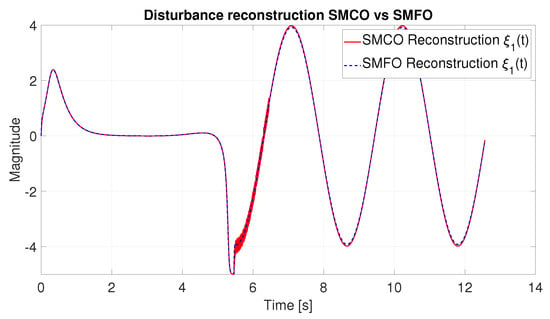
Figure 9.
Disturbance reconstruction of using the SMCO classical observer and the SMFO proposed fractional observer.
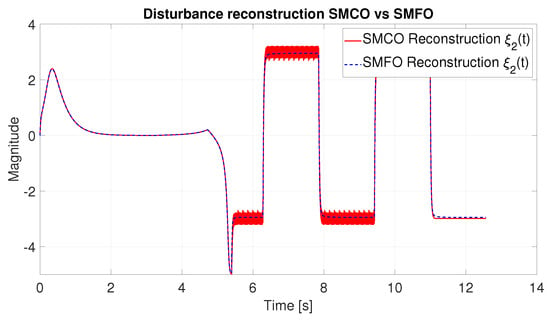
Figure 10.
Disturbance reconstruction of using the SMCO classical observer and the SMFO proposed fractional observer.
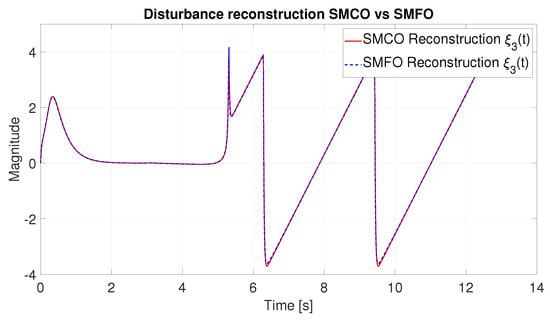
Figure 11.
Disturbance reconstruction of using the SMCO classical observer and the SMFO proposed fractional observer.
Figure 12, Figure 13 and Figure 14 present the dynamics of the MSE performance indices of the disturbances’ reconstruction , , and carried out via the SMCO and the SMFO observers. These indices are a quantitative test of the convergence quality such that a small MSE in magnitude denotes a minor error in the reconstruction process. In addition, to denote the best performance in the transient response of the disturbances’ reconstruction between the SMCO and the SMFO, an indicator of the Best Quality of Reconstruction (BQR) described in Table 3 is proposed. In this table, it can be specified that the MSE is lower for all cases in the proposed SMFO approach.
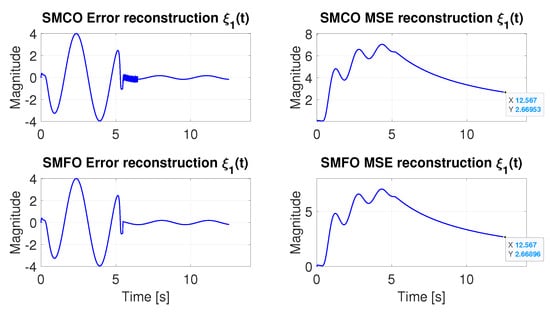
Figure 12.
MSE obtained from the reconstruction of using the SMCO and SMFO observers.
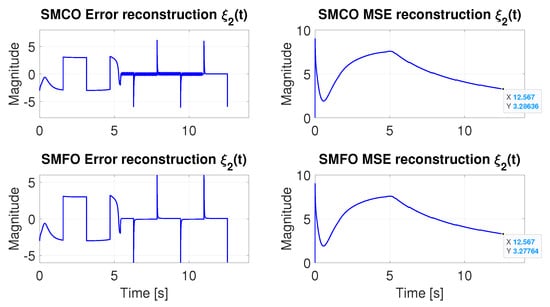
Figure 13.
MSE obtained from the reconstruction of using the SMCO and SMFO observers.
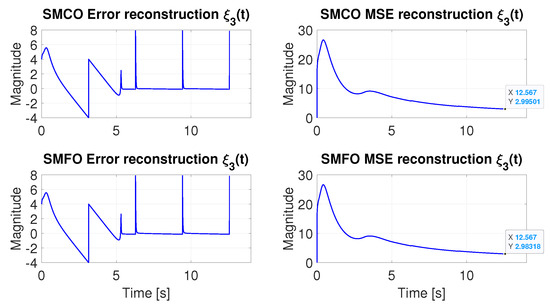
Figure 14.
Mean Square Error MSE obtained from the reconstruction of using the SMCO and SMFO observers.
Table 3.
SMCO and SMFO performance indices and BQR indicator.
Similarly, in Figure 15, Figure 16 and Figure 17, the performance indices obtained using the first probability moment FPM and the second probability moment SPM are presented. These indices are references of the quality of convergence of the disturbances’ reconstruction since the SPM represents a measure of the dispersion concerning its FPM. Thus, a small SPM magnitude describes reconstructed disturbances with less dispersion; consequently, these denote smaller oscillations. Therefore, there could be fewer complications in the physical implementation, avoiding saturation in actuators and sensors. From Table 3, it can be concluded that for all cases, the SPM is greater in the SMCO approach than in the proposed SMFO approach. Then, considering the BQR indicator, it is possible to conclude that the SMFO performs better disturbances’ reconstruction for all cases since its MSE and SPM performance indices are smaller than the SMCO indices.
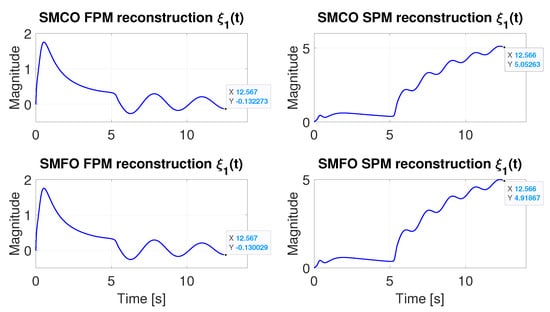
Figure 15.
FMP and SMP obtained from the reconstruction of using the SMCO and SMFO observers.
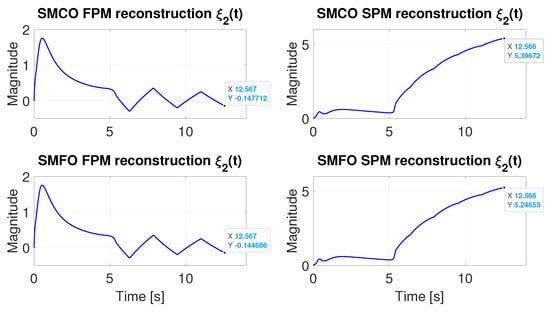
Figure 16.
FMP and SMP obtained from the reconstruction of using the SMCO and SMFO observers.
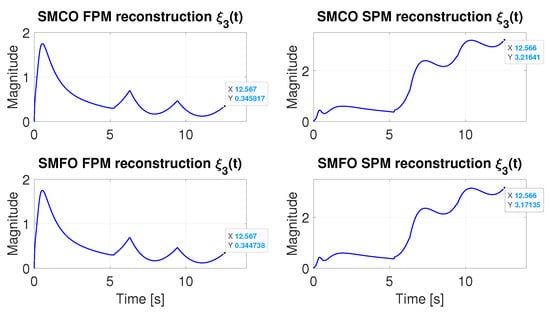
Figure 17.
FMP and SMP obtained from the reconstruction of using the SMCO and SMFO observers.
In summary, the results obtained using the Sliding Mode Classical and Fractional Observers (SMCO and SMFO) provide a solid theoretical framework for state estimation and disturbance reconstruction in dynamic systems, taking, as a particular example, the UAV mathematical model. Although the design of the observers is carried out considering the linearized model of the UAV, its applicability in the aircraft context lies in its ability to deal with different disturbances, providing a fundamental basis for enhancing state estimation and disturbance reconstruction accuracy in more complex systems. Finally, these results establish a robust theoretical foundation that can be extended and applied in the operational context of the UAV, considering its specific dynamics and different flight environment conditions.
5. Conclusions
This research has introduced and rigorously examined a novel Sliding Mode Fractional Observer (SMFO) tailored for disturbance reconstruction in a quadrotor UAV model via performance indices. Using fractional calculus principles, specifically employing the Riemann–Liouville approach, the proposed observer SMFO demonstrated superior capabilities in enhancing the precision and reliability of disturbances’ estimation compared to the Sliding Mode Classical Observer (SMCO). In addition, a mathematical formulation that describes integrating the fractional approach to the classical observer has been applied to the quadrotor UAV model, highlighting its seamless adaptability and efficacy in capturing the intricate dynamics of disturbances affecting the system. To denote one of the contributions of the work, the SMCO and SMFO observers are applied to a quadrotor-type UAV model, presenting numerical simulations that illustrate a comparison between the convergence of the reconstructions obtained using both observers. The simulation results across diverse environmental conditions unequivocally showcased the SMFO ability to achieve accurate disturbance reconstruction with an improved transient response compared to the traditional SMCO. Furthermore, quantitative and qualitative assessments, utilizing performance indices such as Mean Square Error (MSE), the first probability moment (FPM), and the second probability moment (SPM), consistently favored the SMFO, reaffirming its superiority in transient response during disturbance reconstruction. The introduction of the Best Quality of Reconstruction (BQR) indicator provided an additional metric supporting the preference for SMFO, particularly in scenarios where heightened precision is imperative for physical implementations. In this context, if it is of interest to carry out the implementation in a physical prototype of the SMCO and the SMFO, a study of the real-time performance and temporary computational complexity of the observers is required, which should be based on temporary constraints, priority management, real-time task-scheduling criteria, and real-time operating systems, which is marked in another context outside the scope of the objective of this article. Finally, the presented Sliding Mode Fractional Observer (SMFO) offers a promising and advanced solution for enhancing the reliability and precision of disturbance estimation in Quadrotor UAV systems. The findings contribute to robust control strategies and open avenues for further exploration and refinement in fractional-order control methodologies for dynamic aerial systems. The demonstrated improvements in disturbance reconstruction achieved via the SMFO underscore its potential significance in advancing state-of-the-art UAV control technologies.
Author Contributions
Conceptualization, V.B.-J., G.D.-R. and M.A.H.-P.; methodology, V.B.-J., G.D.-R. and M.A.H.-P.; software, V.B.-J., G.D.-R. and J.S.V.-M.; validation, M.C.-B., G.D.-R. and J.S.V.-M.; formal analysis, G.D.-R. and M.A.H.-P.; investigation, V.B.-J., M.C.-B. and G.D.-R.; resources, G.D.-R., J.S.V.-M. and M.C.-B.; data curation, G.D.-R. and V.B.-J.; writing—original draft preparation, G.D.-R., J.S.V.-M., M.A.H.-P., V.B.-J. and M.C.-B.; writing—review and editing, G.D.-R., J.S.V.-M., M.A.H.-P., V.B.-J. and M.C.-B.; visualization, V.B.-J., G.D.-R., J.S.V.-M. and M.A.H.-P.; supervision, V.B.-J. and M.C.-B.; project administration, J.S.V.-M., M.A.H.-P. and V.B.-J.; funding acquisition, G.D.-R., J.S.V.-M. and M.A.H.-P. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Acknowledgments
Vicente Borja would like to thank the Mexican people who supported this research through the postdoctoral program of CONAHCyT (Consejo Nacional de Humanidades, Ciencias y Tecnologías—National Council of Humanities, Sciences, and Technologies), México.
Conflicts of Interest
The authors declare no conflict of interest.
References
- González-Jorge, H.; Martínez-Sánchez, J.; Bueno, M.; Arias, P. Unmanned Aerial Systems for Civil Applications: A Review. Drones 2017, 1, 2. [Google Scholar] [CrossRef]
- AL-Dosari, K.; Hunaiti, Z.; Balachandran, W. Systematic Review on Civilian Drones in Safety and Security Applications. Drones 2023, 7, 210. [Google Scholar] [CrossRef]
- Idrissi, M.; Salami, M.; Annaz, F. A Review of Quadrotor Unmanned Aerial Vehicles: Applications, Architectural Design and Control Algorithms. J. Intell. Robot. Syst. Theory Appl. 2022, 104, 22. [Google Scholar] [CrossRef]
- Wang, P.; Man, Z.; Cao, Z.; Zheng, J.; Zhao, Y. Dynamics modelling and linear control of quadcopter. In Proceedings of the International Conference on Advanced Mechatronic Systems, ICAMechS, Melbourne, VIC, Australia, 30 November–3 December 2016; pp. 498–503. [Google Scholar] [CrossRef]
- Argentim, L.M.; Rezende, W.C.; Santos, P.E.; Aguiar, R.A. PID, LQR and LQR-PID on a quadcopter platform. In Proceedings of the 2013 International Conference on Informatics, Electronics and Vision, ICIEV, Dhaka, Bangladesh, 17–18 May 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Mardlijah; Alifah, Z.N. Control Design of Quadcopter using Linear Quadratic Gaussian (LQG). In Proceedings of the International Conference on Computer Engineering, Network and Intelligent Multimedia, CENIM, Surabaya, Indonesia, 22–23 November 2022; pp. 192–196. [Google Scholar] [CrossRef]
- Sonugür, G. A Review of quadrotor UAV: Control and SLAM methodologies ranging from conventional to innovative approaches. Rob. Auton. Syst. 2023, 161, 104342. [Google Scholar] [CrossRef]
- Chen, C.C.; Chen, Y.T. Feedback Linearized Optimal Control Design for Quadrotor with Multi-Performances. IEEE Access 2021, 9, 26674–26695. [Google Scholar] [CrossRef]
- Dierks, T.; Jagannathan, S. Output feedback control of a quadrotor UAV using neural networks. IEEE Trans. Neural Netw. 2010, 21, 50–66. [Google Scholar] [CrossRef] [PubMed]
- Mo, H.; Farid, G. Nonlinear and Adaptive Intelligent Control Techniques for Quadrotor UAV—A Survey. Asian J. Control 2019, 21, 989–1008. [Google Scholar] [CrossRef]
- Runcharoon, K.; Srichatrapimuk, V. Sliding Mode Control of quadrotor. In Proceedings of the 2013 The International Conference on Technological Advances in Electrical, Electronics and Computer Engineering, TAEECE, Konya, Turkey, 9–11 May 2013; pp. 552–557. [Google Scholar] [CrossRef]
- Garcia, O.; Ordaz, P.; Santos-Sanchez, O.J.; Salazar, S.; Lozano, R. Backstepping and Robust Control for a Quadrotor in Outdoors Environments: An Experimental Approach. IEEE Access 2019, 7, 40636–40648. [Google Scholar] [CrossRef]
- Zhang, K.; Shi, Y.; Sheng, H. Robust Nonlinear Model Predictive Control Based Visual Servoing of Quadrotor UAVs. IEEE/ASME Trans. Mechatron. 2021, 26, 700–708. [Google Scholar] [CrossRef]
- Satici, A.C.; Poonawala, H.; Spong, M.W. Robust optimal control of quadrotor UAVs. IEEE Access 2013, 1, 79–93. [Google Scholar] [CrossRef]
- Shi, X.; Cheng, Y.; Yin, C.; Dadras, S.; Huang, X. Design of Fractional-Order Backstepping Sliding Mode Control for Quadrotor UAV. Asian J. Control 2019, 21, 156–171. [Google Scholar] [CrossRef]
- Han, B.; Zhou, Y.; Deveerasetty, K.K.; Hu, C. A review of control algorithms for quadrotor. In Proceedings of the 2018 IEEE International Conference on Information and Automation, ICIA, Wuyishan, China, 11–13 August 2018; pp. 951–956. [Google Scholar] [CrossRef]
- Shao, X.; Liu, J.; Cao, H.; Shen, C.; Wang, H. Robust dynamic surface trajectory tracking control for a quadrotor UAV via extended state observer. Int. J. Robust Nonlinear Control 2018, 28, 2700–2719. [Google Scholar] [CrossRef]
- Mokhtari, A.; M’Sirdi, N.K.; Meghriche, K.; Belaidi, A. Feedback linearization and linear observer for a quadrotor unmanned aerial vehicle. Adv. Robot. 2012, 20, 71–91. [Google Scholar] [CrossRef]
- Zuo, L.; Yao, L.; Kang, Y. UIO Based Sensor Fault Diagnosis and Compensation for Quadrotor UAV. In Proceedings of the 32nd Chinese Control and Decision Conference, CCDC, Hefei, China, 22–24 August 2020; pp. 4052–4057. [Google Scholar] [CrossRef]
- Ren, X.L. Observer Design for Actuator Failure of a Quadrotor. IEEE Access 2020, 8, 152742–152750. [Google Scholar] [CrossRef]
- Han, Q.; Liu, Z.; Su, H.; Liu, X. Filter-Based Disturbance Observer and Adaptive Control for Euler–Lagrange Systems with Application to a Quadrotor UAV. IEEE Trans. Ind. Electron. 2023, 70, 8437–8445. [Google Scholar] [CrossRef]
- Fethalla, N.; Saad, M.; Michalska, H.; Ghommam, J. Robust Observer-Based Dynamic Sliding Mode Controller for a Quadrotor UAV. IEEE Access 2018, 6, 45846–45859. [Google Scholar] [CrossRef]
- Benallegue, A.; Mokhtari, A.; Fridman, L. High-order sliding-mode observer for a quadrotor UAV. Int. J. Robust Nonlinear Control 2018, 18, 427–440. [Google Scholar] [CrossRef]
- Ma, F.; Yang, Z.; Ji, P. Sliding Mode Controller Based on the Extended State Observer for Plant-Protection Quadrotor Unmanned Aerial Vehicles. Mathematics 2022, 10, 1346. [Google Scholar] [CrossRef]
- Ortiz-Torres, G.; Valdez-Resendiz, J.E.; Torres-Cantero, C.A.; Rumbo-Morales, J.Y.; Ramos-Martinez, M.B.; Valdez-Martinez, J.S. Actuator and Sensor Fault Detection and Isolation System Applied to a Distillation Column. IEEE Access 2023, 11, 48548–48558. [Google Scholar] [CrossRef]
- Zhao, K.; Li, P.; Zhang, C.; Li, X.; He, J.; Lin, Y. Sliding Mode Observer-Based Current Sensor Fault Reconstruction and Unknown Load Disturbance Estimation for PMSM Driven System. Sensors 2017, 17, 2833. [Google Scholar] [CrossRef]
- Li, Z.; Liu, L.; Dehghan, S.; Chen, Y.; Xue, D. A review and evaluation of numerical tools for fractional calculus and fractional order controls. Int. J. Control 2016, 90, 1165–1181. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y. Fractional order [proportional derivative] controller for a class of fractional order systems. Automatica 2009, 45, 2446–2450. [Google Scholar] [CrossRef]
- Birs, I.; Muresan, C.; Nascu, I.; Ionescu, C. A Survey of Recent Advances in Fractional Order Control for Time Delay Systems. IEEE Access 2019, 7, 30951–30965. [Google Scholar] [CrossRef]
- Dastjerdi, A.A.; Vinagre, B.M.; Chen, Y.; HosseinNia, S.H. Linear fractional order controllers; A survey in the frequency domain. Annu. Rev. Control 2019, 47, 51–70. [Google Scholar] [CrossRef]
- Cajo, R.; Mac, T.T.; Plaza, D.; Copot, C.; De-Keyser, R.; Ionescu, C. A Survey on Fractional Order Control Techniques for Unmanned Aerial and Ground Vehicles. IEEE Access 2019, 7, 66864–66878. [Google Scholar] [CrossRef]
- Zhao, M.; Hu, Y.; Song, J. Improved Fractional-Order Extended State Observer-Based Hypersonic Vehicle Active Disturbance Rejection Control. Mathematics 2022, 10, 4414. [Google Scholar] [CrossRef]
- Alsubaie, H.; Yousefpour, A.; Alotaibi, A.; Alotaibi, N.D.; Jahanshahi, H. Stabilization of Nonlinear Vibration of a Fractional-Order Arch MEMS Resonator Using a New Disturbance-Observer-Based Finite-Time Sliding Mode Control. Mathematics 2023, 11, 978. [Google Scholar] [CrossRef]
- Elyaalaoui, K.; Labbadi, M.; Boubaker, S.; Kamel, S.; Alsubaei, F.S. On Novel Fractional-Order Trajectory Tracking Control of Quadrotors: A Predefined-Time Guarantee Performance Approach. Mathematics 2023, 11, 3582. [Google Scholar] [CrossRef]
- Zhu, L.; Qi, X.; Wang, P. Adaptive Fuzzy Fractional Order Global Sliding Mode Tracking Control Algorithm for Particleboard Glue System. Processes 2022, 10, 719. [Google Scholar] [CrossRef]
- Delgado, G.; Valdez, J.S.; Hernández, M.A.; Pérez, K.R.; García, P.J. Quadrotor Real-Time Simulation: A Temporary Computational Complexity-Based Approach. Mathematics 2022, 10, 2032. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S.; Patton, R. Sliding mode observers for fault detection and isolation. Automatica 1999, 36, 541–553. [Google Scholar] [CrossRef]

















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).