Abstract
The main aim of this paper is to numerically solve the first kind linear Fredholm and Volterra integral equations by using Modified Bernstein–Kantorovich operators. The unknown function in the first kind integral equation is approximated by using the Modified Bernstein–Kantorovich operators. Hence, by using discretization, the obtained linear equations are transformed into systems of algebraic linear equations. Due to the sensitivity of the solutions on the input data, significant difficulties may be encountered, leading to instabilities in the results during actualization. Consequently, to improve on the stability of the solutions which imply the accuracy of the desired results, regularization features are built into the proposed numerical approach. More stable approximations to the solutions of the Fredholm and Volterra integral equations are obtained especially when high order approximations are used by the Modified Bernstein–Kantorovich operators. Test problems are constructed to show the computational efficiency, applicability and the accuracy of the method. Furthermore, the method is also applied to second kind Volterra integral equations.
Keywords:
Volterra integral equations; Fredholm integral equations; Modified Bernstein–Kantorovich operators; Moore–Penrose inverse; regularization MSC:
45A05; 45D05; 65R20; 41A36
1. Introduction
Fredholm and Volterra integral equations of the first kind play an important role in many problems from science and engineering. It is known that the Fredholm integral equations can be derived from boundary value problems with given boundary conditions. For example, Fredholm integral equations of the first kind arise in a mathematical model of the transport of fluorescein across the blood–retina barrier in the transient state and the subsequent diffusion of fluorescein in the vitreous body given in Larsen et al. [1]. Some other applications are in palaeoclimatology given in Anderssen and Saull [2], antenna design in Herrington [3], astrometry in Craig and Brown [4], image restoration in Andrews and Hunt [5]. The investigation of Volterra integral equations is very important in solving initial value problems of usual and fractional differential equations arising from the mathematical modelling of many scientific problems, including population dynamics, spread of epidemics, and semi-conductor devices, such as the biological fractional n-species delayed cooperation model of Lotka–Volterra type given in Tuladhar et al. [6]. Examples of Volterra integral equations of first kind can be extended to mathematical model of animal studies of the effect of the deposition of radioactive debris in the lung by Hendry [7], the heat conduction problem in Bartoshevich [8], tautochrone problem of which Abel’s integral equation was derived by Abel [9], (see also Groetsch [10]), electroelastic of dynamics of a nonhomogeneous spherically isotropic piezoelectric hollow sphere problem in Ding et al. [11]. Additionally, the use of a dynamical model of Volterra integral equations in energy storage with renewable and diesel generation has been analysed in Sidorov et al. [12].
As a classical ill-posed problem, the numerical solution of Fredholm integral equations of the first kind has been investigated by many authors, as a former study by Phillips [13] and a recent study by Neggal et al. [14]. The well-known early methods are the regularization methods given with a technique by Phillips in [13] and the Tikhonov regularization by Tikhonov in [15,16]. In the Tikhonov method, a continuous functional is usually used and the minimizer for the corresponding functional is difficult to obtain. Consequently, several methods have been proposed to obtain an effective choice of the regularization parameter in Tikhonov method such as the discrepancy principle, the quasi-optimality criterion (see Groetsch [17], Bazan [18] and references therein). Further, in Caldwell [19], a direct quadrature method and a boundary-integral method were examined for solving Fredholm integral equations of the first kind. Additionally, a regularization technique which replaces ill-posed equations of the first kind by well-posed equations of the second kind was employed to produce meaningful results for comparison purposes. Later, the extrapolation technique by Brezinski et al. [20] and a modified Tikhonov regularization method to solve the Fredholm integral equation of the first kind under the assumption that measured data are contaminated with deterministic errors was given in Wen and Wei [21]. Recently, a variant of projected Tikhonov regularization method for solving Fredholm integral equations of the first kind was proposed in Neggal et al. [14] in which for the subspace of projection, the Legendre polynomials were used.
Early studies for the solution of Volterra integral equations of the first kind involve the high order block by block methods in Hoog and Weiss [22,23]. However, these methods suffer from the disadvantage of requiring additional evaluations of the kernels and the solution of systems of algebraic equations for each step. Later, Taylor [24] used inverted differentiation formulae, which the resulting methods were explicit corresponding to local differentiation formulae. As the author stated “the main disadvantage of this method is that weights must be calculated from the recurrence relation (2.9) and the differentiation formula must be chosen so that the Dahlquist root condition is satisfied”. Integral equations of the first kind associated with strictly monotone Volterra integral operators were solved in Brunner [25] by projecting the exact solution of such an equation into the space of piecewise polynomials of degree possessing jump discontinuities on the set of knots. Besides, the asymptotic behavior of solutions to nonlinear Volterra integral equations was analysed in Hulbert and Reich [26]. The future-sequential regularization method and predictor-corrector regularization method for the approximation of Volterra integral problems of first kind with convolution kernel were given in Lamm [27] and Lamm [28], respectively. The numerical solution of Volterra integral equations of the first kind by sequential Tikhonov regularization coupled with several standard discretizations (collocation-based methods, rectangular quadrature, or midpoint quadrature) was given in Lamm and Eldén [29].
New approaches have been developed for the solution of integral equations that use the basis functions and transform the integral equation to the system of linear or nonlinear equations. One of these approaches is the use of wavelet basis. For the solution of Abel’s integral equation, Legendre wavelets were used in Yousefi [30] and the wavelet basis were used in Maleknejad et al. [31] for the numerical solution of Volterra type integral equations of the first kind. Another approach is the use of polynomial approximations. In Mandal and Bhattacharya [32], Fredholm integral equations of the second kind and a simple hypersingular integral equation and a hypersingular integral equation of the second kind were numerically solved using Bernstein polynomials. At the same year, in Maleknejad et al. [33] numerical solution of linear and nonlinear Volterra integral equations, of the second kind by using Chebyshev polynomials was given. Afterwards, a new approach to the numerical solution of Volterra integral equations by using Bernstein’s approximation was given in Maleknejad et al. [34].
Recently, exhaustive studies on the use of CESTAC method for the solution of Volterra first type integral equations has been given in Noeiaghdam et al. [35] in which the control of accuracy on Taylor-collocation method to solve the weakly regular Volterra integral equations of the first kind has been studied. Furthermore, in Noeiaghdam et al. [36] that the numerical validation of the Adomian decomposition method for solving Volterra integral equation with discontinuous kernels was given.
The need of stable, reliable and time efficient methods for the numerical solution of Fredholm and Volterra integral equations of first kind is the main motivation of contributions. The achievements of the study can be summarised as follows:
1. Using the Modified Bernstein–Kantorovich operators, a numerical approach is developed for the solution of Fredholm and Volterra integral equations of the first kind with continuous and square integrable kernels. Convergence analysis are given assuming that minimum norm least square solution of the obtained algebraic linear systems are obtained by using the exact data, that is to say the Moore–Penrose inverse of the resulting coefficient matrices are computed exactly.
2. Furthermore, regularized integral equations are considered to obtain more smooth solutions especially when high-order approximations are used by Modified Bernstein–Kantorovich operators. The proposed approach is applied by building regularization features into the algorithm and perturbation error analysis are given.
3. Test problems are conducted and theoretical results are justified with the obtained numerical results.
2. Asymptotic Rate of Convergence of Modified Bernstein–Kantorovich Operators
The Modified Bernstein–Kantorovich operators were used to approximate a function (see Özarslan and Duman [37]) where,
and
and is constant. For reduces to classical Bernstein–Kantorovich operator
Theorem 1.
(Theorem 2.3 in Özarslan and Duman [37]) For each and every we have on where the symbol ⇉ denotes the uniform convergence.
Lemma 1.
For each fixed and we have
where,
Proof.
Next, we use the notations and to present the maximum norm for and norm of the function Further, we denote and to present the discrete Euclidean norm of a vector and the spectral norm of a matrix , respectively, where is the spectral radius and is the transpose of P. Voronowskaja [38] gave the asymptotic rate of convergence of the Bernstein operators
using the linearity property of the Bernstein operators and Taylor formula at a point x as
Based on the analogous approach in Voronowskaja [38] we give the asymptotic rate of convergence of the Modified Bernstein–Kantorovich operators by the next theorem.
Theorem 2.
If f is integrable in and admits a derivative of second order at some point then
Additionally this limit is uniform if , thus the rate of convergence of the operator to is for
Proof.
Assume that f is integrable in and has second order derivative at a point then from Taylor’s formula at x we have
and as and E is integrable function on Using the linearity property of the operators and (8)–(10) we have
where,
To show that the asymptotic rate of convergence is , it is sufficient to show that . Let and for arbitrary there exist such that whenever . For all it follows that Then, let
Corollary 1.
3. Representation of the Operators and Discretization of First Kind Integral Equations
We consider the Fredholm integral equation of the first kind (FK1)
and Volterra integral equations of the first kind (VK1)
where is called the free term while is called the kernel and is the unknown function to be determined.
Definition 1.
(Groetsch [17,39]) By means of the singular value expansion (SVE) any square integrable kernel can be written in the form
The functions are the singular functions of K and they are orthonormal with respect to the usual inner product and the number are the singular values of For degenerate kernels the infinite sum (29) is replaced with the finite sum upto the rank of the kernel. The system is called the singular system of
Let be a compact linear operator on a real Hilbert space , taking values in a real Hilbert space . The next theorem is known as the Picard’s theorem on the existence of the solutions of first kind equations.
Theorem 3.
(Theorem 1.2.6 in Groetsch [17]) Let be a compact linear operator with singular system In order that the equation have a solution it is necessary and sufficient that (orthogonal complement of the nullspace of the adjoint of ) and
On the basis of Theorem 3 we consider the Hypothesis 1 as follows:
Hypothesis 1.
- The kernel is continuous and square integrable function on
Without loss of generality, the solution f of FK1 and VK1 denotes the pseudoinverse solution or the Moore-Penrose generalized inverse solution for FK1 and VK1
respectively. Further, in order to determine the effect of in the numerical solution we represent the Modified Bernstein–Kantorovich operators (1) for in the form
where
For the numerical solution of FK1 and VK1, we approximate the function f by using the Modified Bernstein–Kantorovich operators in (32). We obtain the following equation for FK1
and for VK1 we get
Subsequently we take the grid points and , where . Then, the Equations (35) and (36) are transformed into algebraic systems of equations
respectively, where the coefficient matrices A and have the entries
and
and are as given in (33) and (34), respectively. The coefficient matrices A and in (37) are ill-conditioned matrices and may be rank deficient or even singular matrices. Therefore, we consider the following minimum norm least squares problem for FK1
and for VK1
Lemma 2.
Proof.
Proof is analogous to the proof of Theorem 1.2.10 in Björck [40]. □
Convergence Analysis
By solving the algebraic systems (42) and (43) we get a numerical solution of the unknown (40) and denote this approximation by Further, let us use to denote the obtained numerical approximation to f that is in the implicit form in and obtained by using the proposed approach. Substituting in (32) we get as
Definition 2.
(Definition 1.4.2 in Björck [40]) The condition number of () is
where , and are the nonzero singular values of
Theorem 4.
ConsiderFK1andVK1in (27), (28), respectively, and assume that the conditions of theHypothesis Iare satisfied also the solution f belongs to for some then forFK1
and forVK1
hold true where,
and and are given in (6), (7), (23) and (24) respectively. Furthermore, where , and , and . Further, is the approximate solution obtained by the proposed method and and are given in (38) and (39), respectively.
Proof.
For FK1 it follows that
It follows that
From Theorem 1, the operator uniformly converges to f for any and for any computationally acceptable small
where, as usual, comes from the uniform continuity of the function and is given in (9) (see Özarslan and Duman [37]). Therefore, for the numerical solution of FK1 and VK1 equations in (27), and (28) in accordance we assume
respectively. If we substitute instead of in (53), (54) we get new function on the right sides of these equations accordingly,
Thus, for FK1 using (53) and (55) and by taking the grid points and , where we obtain the algebraic system
The minimum norm solution of the least squares problem for (57) is
Thus
and for VK1
Next, consider FK1 and let and then it follows that
then using Corollary 1 and estimation (21) and (57) and (61) and taking for and and using (48) we get
4. Regularized Numerical Solution
The numerical solution of the general least squares problems (42) and (43) may be extremely difficult because the solution is very sensitive to the perturbations of the coefficient matrices A and and the right side vector B. This is reflected in the fact that and are very large and increases as n increases which is the degree of the constructed polynomial by the Modified Bernstein–Kantorovich operator used for the approximation of the solution. High condition numbers of the matrices A and cause rounding errors that prevent the computation of an accurate numerical solution of the problems (42) and (43), respectively. Moreover, the obtained discrete problems are always perturbed by approximations such as the integrals given as the entries of A and are evaluated numerically. Therefore, even if we were able to solve the discrete algebraic problems (42) and (43) without rounding errors we would not obtain a “smooth” solution because of the oscillations in the singular vectors. By a smooth solution we mean “a solution which has some useful properties in common with the exact solution to the underlying and unknown unperturbed problem” as stated in Hansel [41]. Furthermore, the function g is typically a measured or observed quantity and hence, in practice, the true g is not available to us. On one hand, the estimate of g satisfying and is the priori error level is known(see Tikhonov [15] and [16] and Groetsch [17]). Therefore, we consider the following regularized problems for the Fredholm integral equation of the first kind (RFK1) (see Tikhonov [15,16] and Groetsch [17])
and Volterra integral equations of the first kind (RVK1)
It is clear that (67) and (68) are second kind Fredholm and Volterra integral equations, respectively. For the numerical solution of RFK1 and RVK1 by the proposed method we take the grid points and , where and is sufficiently small number also is called the regularization parameter. We assume the following algebraic equations for RFK1
and for RVK1
for Then, the discrete regularized Equations (69) and (70) can be presented in matrix form
for the RFK1 and for the RVK1 respectively where,
and the vector
which can be written as such that is the priori error level Furthermore, where A is the matrix in (38) and with the addition of diagonal matrix and which is the defect matrix of the numerical errors of the computation of the integrals in (69) with a predescribed error depending on Analogously, and is as in (39) and the matrix has the defect matrix of the numerical errors of the computed integrals in (70) with a predescribed error Therefore, it is possible to choose such that and Clearly, the numbers h and are estimates of the errors of the approximate data of the problem (37) for FK1 and VK1, respectively, with the exact data accordingly. Thus, the given regularized systems (71) uses h and explicitly. For the implementation of the approach we have taken . In this connection, about the remarks on choosing the regularization parameter using the quasi-optimality and ratio criterion, see Bakushinskii [42] and for the data errors and an error estimation for ill-posed problems see Yagola et al. [43]. Next, we consider the following general least squares problem for RFK1
and for RVK1
Theorem 5.
(Theorem 1.4.2 in Björck [40]) If and < 1 then
Theorem 6.
(Theorem 1.4.6 in Björck [40]) Assume that and let
Then if the perturbations and in the least squares solution X and the residual satisfy
Let denote the minimum norm solution obtained by solving the general least squares problems (75) and (76). Further, denote the obtained approximation to function appearing implicitly in (72). Substituting in (32) we get as
We also present the residual error of the obtained algebraic linear system (37) for FK1 by ( for VK1). The regularized residual error of the system (71) for RFK1 is ( for RVK1). Furthermore, the corresponding numerical calculation of the regularized residual error is ( ) accordingly. Next, the following priory bound for the error of the approximation follows.
Theorem 7.
Assume that the conditions ofHypothesis Iare satisfied and the solution of (67)belongs to for some Consider the regularized linear system given in (71) where and A is the matrix in (38) and . Furthermore, as in (74) and B is the vector in (41) and Additionally and and let for and , where and Further,
Proof.
For RFK1, it follows that
Based on Corollary 1 and the estimation (22) by replacing f with in estimation (22) and in (47) we obtain
For the numerical solution of RFK1 in (67) we use the grid points and , where We assume
where gives the average value of over the interval If we substitute instead of in (89) we get a new function on the right side of this equation
Thus, for RFK1 from (89) and (90) we obtain
where, is as given in (88). The general least squares problem of (91) has the minimum norm solution
Thus,
Then, let and for it follows that
From the assumption that for some it follows that
Let , by taking
for and also on the basis of Corollary 1 and replacing f with in estimations (21) and (48) we obtain
Inserting (86) and (99) in (85) and on the basis of Theorem 5 and using that we obtain (82). The inequality (83) is obtained by using
and based on the Theorem 6 and the inequality (78) the first term on the right side of (100) is obtained as
Theorem 8.
Proof.
Proof is analogous to the proof of Theorem 7. □
5. Numerical Results
For the theoretical results given in Section 2, Section 3 and Section 4, we focus on the interval ; however, for the numerical results, we also consider examples on with the following extention of the Bernstein operators and Modified Bernstein–Kantorovich operators on the interval
respectively. All the computations in this section are performed using Mathematica in machine precision on a personal computer with properties AMD Ryzen 7 1800X Eight Core Processor 3.60 GHz. We remark that the solution of the Volterra integral equations by using Bernstein polynomials was given in Maleknejad et al. [34]. All the considered test problems are also solved by using Bernstein operators (11) with the approach given in Maleknejad et al. [34]; additionally, regularization is applied. Further, the obtained algebraic system of equations by applying the methods and are solved using the pseudoinverse of the respective matrices. Let the following error grid functions be defined at the grid points over the interval as
Further, we use the following notations in tables and figures:
- presents the given approach by using the Modified Bernstein–Kantorovich operators
- presents the approach in Maleknejad et al. [34] by using the Bernstein operators
- denotes the condition number of the perturbed matrix obtained by the method using LinearAlgebra‘Private‘MatrixConditionNumber command in Mathematica.
- denotes the condition number of the perturbed matrix obtained by the method using LinearAlgebra‘Private‘MatrixConditionNumber command in Mathematica.
- denotes the root mean square error () of the regularized solutionobtained by
- denotes of the regularized solutionobtained by
- is the absolute error of the regularized solution at the point .
- is the absolute error of the regularized solution at the point .
- shows the maximum error of the regularized solution
- shows the maximum error of the regularized solution
- means that the specified method is not applied to the considered example.
- means that the absolute error is not given at the presented grid point by the specified method.
5.1. Application on Examples of Fredholm Integral Equations
We consider the following test problems of first kind Fredholm integral equations, which have been used as benchmark problems in the literature.
Example 1.
FK1(Wen and Wei [21] and Baker et al. [44])
and the exact solution is
Example 2.
FK1(Wen and Wei [21])
where the exact solution is
Example 3.
FK1( Baker et al. [44])
and the exact solution is
Example 4.
FK1
and the exact solution is
Table 1 presents the with respect to n obtained by the proposed approach when and for the examples of FK1 and when for the Example 1, Example 2 and Example 4 and for the Example 3. The absolute errors obtained by the method at the points for the examples FK1 when and for the same values of as in Table 1 are demonstrated in Table 2. Further, Table 3 shows the same quantities as in Table 1 obtained by using the approach . Table 4, Table 5, Table 6 and Table 7 present the condition numbers of the perturbed matrices, with respect to the obtained by the proposed method and the method when and for the Example 1, Example 2, Example 3 and Example 4, respectively. Table 8 presents the with respect to obtained by the proposed approach when and for the examples of FK1. In this table, the parameter is taken as for the Example 1, Example 2 and Example 4 and for the Example 3.

Table 1.
The for the examples of FK1 with respect to n when and , obtained by the method .
Table 2.
The absolute errors at 9 points over [0,1] for the examples of FK1 when , and obtained by the method .
Table 3.
The for the examples of FK1 with respect to n when and obtained by the method .
Table 4.
Condition numbers and the for the Example 1 of FK1 when and , .
Table 5.
Condition numbers and the for the Example 2 of FK1 when and , .
Table 6.
Condition numbers and the for the Example 3 of FK1 when and , .
Table 7.
Condition numbers and the for the Example 4 of FK1 when and , .
Table 8.
The for the examples of FK1 with respect to when , and for the Example 1, Example 2 and Example 4 and for the Example 3.
Figure 1 presents the with respect to obtained by for the examples of FK1, when and It can be viewed that the optimal value of is for the Example 1, and Example 4, whereas gives the lowest for the Example 2 and Example 3. Figure 2 illustrates the with respect to n obtained by the methods and for the considered examples of FK1 when and Furthermore, for the data in Figure 1 and Figure 2 the regularization parameter is taken as for the Example 1, Example 2 and Example 4 and for the Example 3. Figure 3 shows the with respect to obtained by the methods and for the examples of FK1 when and
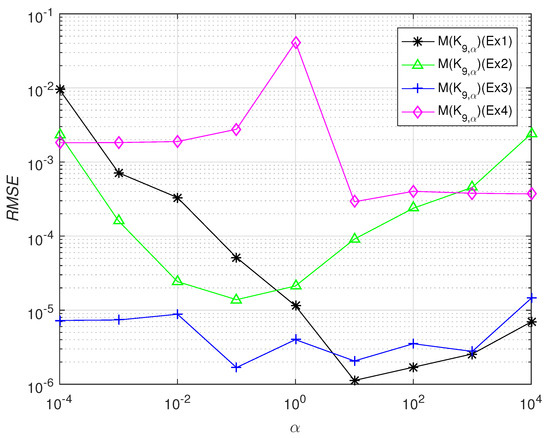
Figure 1.
The with respect to obtained by for the examples of FK1, when and .
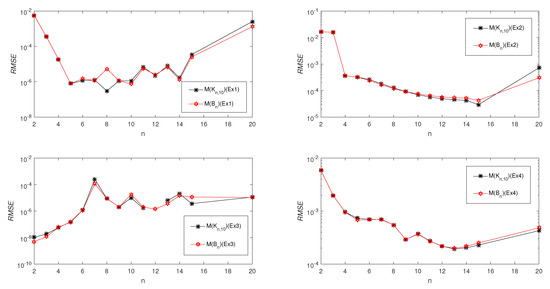
Figure 2.
The with respect to n obtained by the methods and for the examples of FK1 when and .
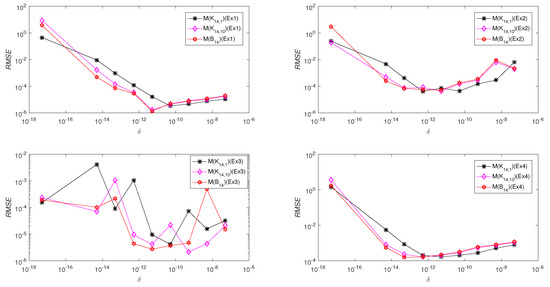
Figure 3.
The with respect to obtained by the methods , and for the examples of FK1 when and .
Table 9 shows the accuracy comparisons of the proposed approach with the known methods from the literature of which the errors in Baker et al. [44] are given in (maximum error) and other errors are given in for the Example 1, Example 2 and Example 3 of FK1. The data in the second row presents the results in Wen and Wei [21] for and the error in the third row last column is from Table 1 () given in Baker et al. [44]. The data in row 4 and row 5 are obtained by the methods and , respectively for while the results in row 6, row 7 are achieved by accordingly also for
Table 9.
Accuracy comparison of the proposed approach with the methods from the literature for the Example 1, Example 2 and Example 3 of FK1.
For the Example 4, the exact solution Hence, dealing with this test problem we provide comparisons between the methods and based on the regularization parameter taken as and on the order n of the approximation in Figure 4 and Figure 5, respectively. Figure 4 shows the with respect to obtained by the methods and for the Example 4 of FK1 when and It can be viewed that for the given approach give more accurate results then Figure 5 illustrates the with respect to n obtained by the methods and for the Example 4 of FK1 when and This figure show that and give more accurate results then for large values of n that is for
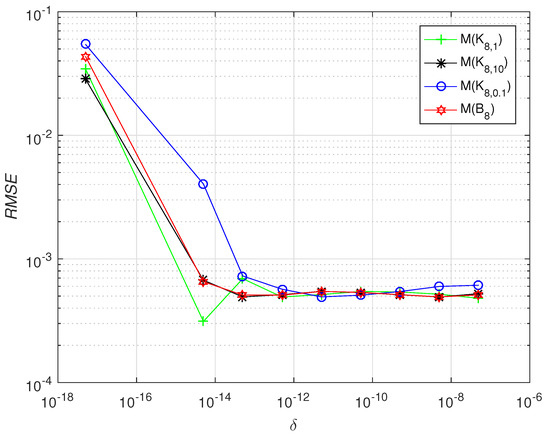
Figure 4.
The with respect to obtained by the methods for and for the Example 4 of FK1 when and .
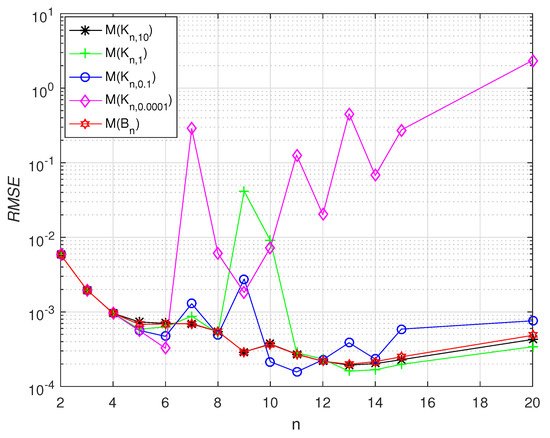
Figure 5.
The with respect to n obtained by the methods for and for the Example 4 of FK1 when and .
5.2. Applications on Volterra Integral Equations
Example 5.
VK2(Maleknejad et al. [33], Rashad [45] )
where the exact solution is
Example 6.
VK2(Maleknejad et al. [34], Polyamin [46])
where the exact solution is
Example 7.
VK1(Taylor [24], Brunner [25])
where the exact solution is and in Taylor [24] and in Brunner [25].
Example 8.
VK1 (Maleknejad et al. [34], Polyamin [46])
where the exact solution is
Remark 2.
For the numerical solution of Example 6 ofVK2by the method and using the grid points and , results in the following algebraic system of equations
where coefficient matrix has the entries
and the vectors X and B are as in (40) and (41), respectively. The numerical solution of Example 5 ofVK2by the method is analogous by using the extension of the Modified Bernstein–Kantorovich operators (111) on the interval
Table 10 presents the with respect to n obtained by the proposed approach when and for the Example 5, Example 6 of VK2 and Example 7, Example 8 of VK1. Table 11 and Table 12 show the with respect to n obtained by the methods and respectively when for the considered examples of VK2 and VK1. From Table 10, Table 11 and Table 12 we conclude that the error is not improved for for the Examples 6–8 due to the large condition numbers of the coefficient matrices. Table 13 demonstrates the with respect to obtained by the proposed approach when and for the considered examples of VK2 and VK1. This Table shows that gives stable solution with respect to for the taken values of and . Further, in Table 10, Table 11, Table 12 and Table 13 for the Example 7,
Table 10.
The for the Example 5, Example 6 of VK2 and Example 7, Example 8 of VK1 with respect to n when , obtained by .
Table 11.
The for the Example 5, Example 6 of VK2 and Example 7, Example 8 of VK1 with respect to n when , obtained by .
Table 12.
The for the Example 5, Example 6 of VK2 and Example 7, Example 8 of VK1 obtained by for .
Table 13.
The for the Example 5, Example 6 of VK2, Example 7 and Example 8 of VK1 with respect to when and obtained by .
The absolute errors for the Example 5 of VK2 when (9 points) obtained by the methods and are presented in Table 14. Additionally, in Table 15, absolute errors obtained by the methods and and by the approach given in Maleknejad et al. [33] (Table 1, column 3) for the same example over the same grid points are compared when It can be concluded from this table that the maximum error () is by the methods , and it is by the method in Maleknejad et al. [33] and occurs at the same grid point Furthermore, Table 14 shows that the maximum error decreases down to by and to by over the same grid points. Table 16 shows the absolute errors () at 7 points () from the interval for the Example 7 obtained by the methods and and by the method given in Taylor [24] (Table 2, last column). Table 17 gives at the points from the interval for the Example 7 obtained by the methods and and by the method given in Brunner [25] (Table 2, second column). We conclude from Table 16 and Table 17 that the presented by are smaller than the given values from Taylor [24] and Brunner [25], respectively. However, we should remark that precision of the computations were not mentioned in both of these references. Furthermore, for the all considered examples of VK2 and VK1 by the methods and .
Table 14.
The absolute errors at 9 points for the Example 5 of VK2 obtained by the methods and .
Table 15.
Comparison of the absolute errors at 9 points for the Example 5 of VK2 obtained by the methods , and by the approach in Maleknejad et al. [33].
Table 16.
Comparison of the absolute errors at 7 points for the Example 7 of VK1 obtained by the methods , and by the approach in Taylor [24].
Table 17.
Comparison of the absolute errors when for the Example 7 of VK1 obtained by the methods , and by the approach from Brunner [25].
Figure 6 illustrates the condition number of the matrix in (71) when the method is applied for The and with respect to n obtained by the methods and for the Example 5, Example 6 of VK2 and Example 7 and Example 8 of VK1, when and are given in Figure 7 and Figure 8, respectively. Furthermore, for the data in Figure 6, Figure 7 and Figure 8, the parameter is taken as for the considered examples of VK2 and VK1. It can be seen from Figure 7 that for large n that is , the proposed method for and gives more stable results than for the Example 6 of VK2.
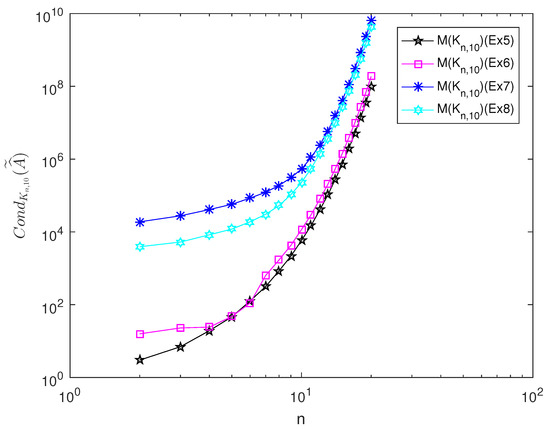
Figure 6.
Condition number of the matrix with respect to n obtained by the method .
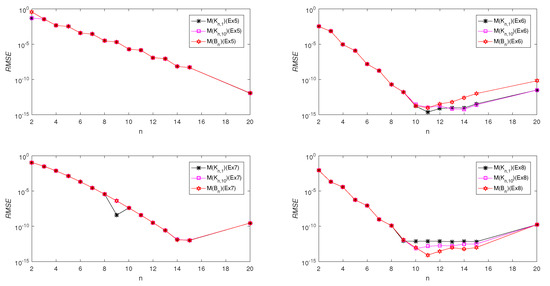
Figure 7.
The with respect to n obtained by the methods and for the Example 5, Example 6 of VK2 and Example 7 and Example 8 of VK1 when and .
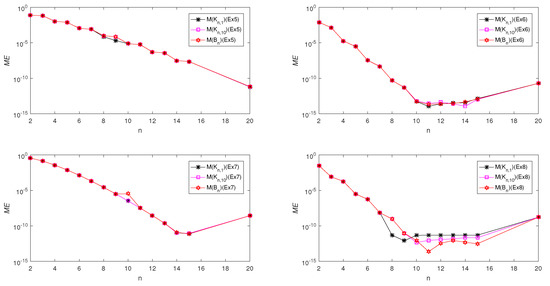
Figure 8.
The with respect to n obtained by the methods and for the Example 5, Example 6 of VK2 and Example 7 and Example 8 of VK1 when and .
6. Conclusions
In this paper, we gave an approach that uses Modified Bernstein–Kantorovich operators to approximate the solution of the Fredholm and Volterra integral equations of first kind. The method is developed first by representing the Modified Bernstein–Kantorovich operators such that the parameter is also expressed explicitly in the operator. Further, the unknown function in the first kind integral equations is approximated by using the given form of the Modified Bernstein–Kantorovich operators so that the effect of in the solution is analyzed. The obtained linear equations are transformed into system of algebraic linear equations. Furthermore, regularization technique is also applied to obtain more stable numerical solution when approximations are conducted using high-order Modified Bernstein–Kantorovich operators. The proposed approach is simple and the obtained numerical results show that the accuracy is high even when low order approximations are used, i.e., for .
Author Contributions
Conceptualization, S.C.B. and M.A.Ö.; methodology, S.C.B. and M.A.Ö.; software, S.S.F.; validation, S.C.B., M.A.Ö. and S.S.F.; formal analysis, S.C.B., M.A.Ö. and S.S.F.; investigation, S.S.F.; resources, S.C.B., M.A.Ö. and S.S.F.; writing—review and editing, S.C.B., M.A.Ö. and S.S.F.; visualization, S.C.B., M.A.Ö. and S.S.F.; supervision, S.C.B., and M.A.Ö.; project administration, S.C.B. and M.A.Ö. All authors have read and agreed to the published version of the manuscript.
Funding
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
Informed Consent Statement
Not applicable.
Data Availability Statement
No data are used.
Acknowledgments
The authors would like to thank the referees for comments and suggestions which improved both the content and exposition of this paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Larsen, J.; Lund-Andersen, H.; Krogsaa, B. Transient transport across the blood-retina barrier. Bull. Math. Biol. 1983, 45, 749–758. [Google Scholar] [CrossRef]
- Anderssen, R.; Saull, V. Surface temperature history determination from borehole measurements. Math. Geol. 1973, 5, 269–283. [Google Scholar] [CrossRef]
- Herrington, R.F. Field Computation by Moment Methods; Macmillian: New York, NY, USA, 1968. [Google Scholar]
- Craig, I.J.D.; Brown, J.C. Inverse Problems in Astronomy; Adam Hilger: Bristol, UK, 1986. [Google Scholar]
- Andrews, H.C.; Hunt, B.R. Digital Image Restoration; Prentice Hall: Englewood Cliffs, NJ, USA, 1977. [Google Scholar]
- Tuladhar, R.; Santamaria, F.; Stamova, I. Fractional Lotka-Volterra-Type Cooperation Models: Impulsive control on their stability behavior. Entropy 2020, 22, 970. [Google Scholar] [CrossRef]
- Hendry, W.L. Volterra integral equation of the fist kind. J. Math. Anal. Appl. 1976, 54, 266–278. [Google Scholar] [CrossRef]
- Bartoshevich, M.A. A heat conduction problem. J. Eng. Phys. 1975, 28, 240–244. [Google Scholar] [CrossRef]
- Abel, N. Auflösung einer mechanischen Aufgabe. J. Die Reine Angew. Math. 1826, 1, 153–157. [Google Scholar]
- Groetsch, C.W. Integral equations of the first kind, inverse problems and regularization: A crash course. J. Phys. Conf. Ser. 2007, 73, 012001. [Google Scholar] [CrossRef]
- Ding, H.J.; Wang, H.M.; Chen, W.Q. Analytical solution for the electroelastic dynamics of a nonhomogeneous spherically isotropic piezoelectric hollow sphere. Arch. Appl. Mech. 2003, 73, 49–62. [Google Scholar] [CrossRef]
- Sidorov, D.; Muftahov, I.; Karamov, D.; Tomin, N.; Panasetsky, D.; Dreglea, A.; Liu, F.; Foley, A. A Dynamic Analysis of Energy Storage with Renewable and Diesel Generation using Volterra Equations. IEEE Trans. Ind. Inform. 2020, 16, 3451–3459. [Google Scholar] [CrossRef]
- Phillips, D.L. A technique for the numerical solution of certain integral equations of the first kind. J. Assoc. Comput. Mach. 1962, 9, 84–97. [Google Scholar] [CrossRef]
- Neggal, B.; Boussetila, N.; Rebbani, F. Projected Tikhonov regularization method for Fredholm integral equations of the first kind. J. Inequalities Appl. 2016, 2016, 1–21. [Google Scholar] [CrossRef]
- Tikhonov, A.N. Solution of incorrectly formulated problems and the regularization method. Soviet Math. Dokl. 1963, 4, 1036–1038. [Google Scholar]
- Tikhonov, A.N. Regularization of incorrectly posed problems. Soviet Math. Dokl. 1963, 4, 1624–1627. [Google Scholar]
- Groetsch, C.W. The Theory of Tikhonov Regularization for Fredholm Equations of the First Kind; Research Notes in Mathematics 105; Pitman: Boston, MA, USA, 1984. [Google Scholar]
- Bazan, F.S.V. Simple and Efficient Determination of the Tikhonov Regularization Parameter Chosen by the Generalized Discrepancy Principle for Discrete Ill-Posed Problems. J. Sci. Comput. 2015, 63, 163–184. [Google Scholar] [CrossRef]
- Caldwell, J. Numerical study of Fredholm integral equations. Int. J. Math. Educ. Sci. Technol. 1994, 25, 831–836. [Google Scholar] [CrossRef]
- Brezinski, C.; Redivo-Zaglia, M.; Rodriguez, G.; Seatzu, S. Extrapolation techniques for ill-conditioned linear systems. Numer. Math. 1998, 81, 1–29. [Google Scholar] [CrossRef]
- Wen, J.W.; Wei, T. Regularized solution to the Fredholm integral equations of the first kind with noisy data. J. Appl. Math. Inform. 2011, 29, 23–37. [Google Scholar]
- de Hoog, F.; Weiss, R. On the solution of Volterra integral equations of the first kind. Numer. Math. 1973, 21, 22–32. [Google Scholar] [CrossRef]
- de Hoog, F.; Weiss, R. High order methods for Volterra integral equations of the first kind. SIAM J. Numer. Anal. 1973, 10, 647–664. [Google Scholar] [CrossRef]
- Taylor, P.J. The solution of Volterra integral equations of first kind using inverted differentiation formulae. BIT 1976, 16, 416–425. [Google Scholar] [CrossRef]
- Brunner, H. Discretization of Volterra integral equations of first kind, (II). Numer. Math. 1978, 30, 117–136. [Google Scholar] [CrossRef]
- Hulbert, D.S.; Reich, S. Asymptotic behavior of solutions to nonlinear Volterra integral equations. J. Math. Anal. Appl. 1984, 104, 155–172. [Google Scholar] [CrossRef][Green Version]
- Lamm, P.K. Future-sequential regularization methods for ill-posed Volterra integral equations. J. Math. Anal. Appl. 1995, 195, 469–494. [Google Scholar] [CrossRef]
- Lamm, P.K. Approximation of ill-posed Volterra problems via Predictor-Corrector regularization Methods. SIAM J. Appl. Math. 1996, 56, 524–541. [Google Scholar] [CrossRef]
- Lamm, P.K.; Eldén, L. Numerical solution of first-kind Volterra equations by sequential Tikhonov regularization. SIAM J. Numer. Anal. 1997, 34, 1432–1450. [Google Scholar] [CrossRef]
- Yousefi, S.A. Numerical solution of Abel’s integral equation by using Legendre wavelets. Appl. Math. Comput. 2006, 175, 574–580. [Google Scholar] [CrossRef]
- Maleknejad, K.; Mollapourasl, R.; Alizadeh, M. Numerical solution of Volterra type integral equation of the first kind with wavelet basis. Appl. Math. Comput. 2007, 194, 400–405. [Google Scholar] [CrossRef]
- Mandal, B.N.; Bhattacharya, S. Numerical solution of some classes of integral equations using Bernstein polynomials. Appl. Math. Comput. 2007, 190, 1707–1716. [Google Scholar] [CrossRef]
- Maleknejad, K.; Sohrani, S.; Rostami, Y. Numerical solution of nonlinear Volterra integral equations, of the second kind by using Chebyshev polynomials. Appl. Math. Comput. 2007, 188, 123–128. [Google Scholar] [CrossRef]
- Maleknejad, K.; Hashemizadeh, E.; Ezzati, R. A new approach to the numerical solution of Volterra integral equations by using Berntein’s approximation. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 647–655. [Google Scholar] [CrossRef]
- Noeiaghdam, S.; Sidorov, D.; Sizikov, V.; Sidorov, N. Control of accuracy on Taylor-collocation method to solve the weakly regular Volterra integral equations of the first kind by using the CESTAC method. Appl. Comput. Math. Int. J. 2020, 19, 81–105. [Google Scholar]
- Noeiaghdam, S.; Sidorov, D.; Wazwaz, A.-M.; Sidorov, N.; Sizikov, V. The Numerical Validation of the Adomian Decomposition Method for Solving Volterra Integral Equation with Discontinuous Kernels Using the CESTAC Method. Mathematics 2021, 9, 260. [Google Scholar] [CrossRef]
- Özarslan, M.A.; Duman, O. Smoothness properties of Modified Bernstein-Kantorovich operators. Numer. Funct. Anal. Optim. 2016, 37, 92–105. [Google Scholar] [CrossRef]
- Voronowskaja, E. Détermination de la forme asymptotique deproximation de fonctions par les polynomes de M. Bernstein. Dokl. Akad. Nauk. 1932, 1932, 79–85. [Google Scholar]
- Hansen, P.C. Rank-Deficient and Ill-Posed Problems: Numerical Aspects of Linear Inversion; SIAM Monographs on Mathematical Modeling and Computation; SIAM: Philedelphia, PA, USA, 1998. [Google Scholar]
- Björck, A. Numerical Methods for Least Squares Problems; SIAM: Philadelphia, PA, USA, 1996. [Google Scholar]
- Hansen, P.C. Numerical tools for analysis and solution of Fredholm integral equations of the first kind. Inverse Probl. 1992, 8, 849–872. [Google Scholar] [CrossRef]
- Bakushinskii, A.B. Remarks on choosing the regularization parameter using the quasi-optimality and ratio criterion. Comput. Maths. Math. Phys. 1984, 24, 181–182. [Google Scholar] [CrossRef]
- Yagola, A.G.; Leonov, A.S.; Titarenko, V.N. Data errors and an error estimation for ill-posed problems. Inverse Probl. Eng. 2002, 10, 117–129. [Google Scholar] [CrossRef]
- Baker, C.T.H.; Fox, L.; Mayers, D.F.; Wright, K. Numerical Solution of Fredholm Integral Equations of First Kind, Linear Programming and Extensions; Dantzig, G.B., Ed.; University Press: Princeton, NJ, USA, 1963. [Google Scholar]
- Rashed, M.T. Lagrange interpolation to compute the numerical solutions of differential, integral and integro-differential equations. Appl. Math. Comput. 2004, 151, 869–878. [Google Scholar] [CrossRef]
- Polyanin, A.D.; Manzhirov, A.V. Handbook of Integral Equations; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).