





A Fault Warning Approach Using an Enhanced Sand Cat Swarm Optimization Algorithm and a Generalized Neural Network
 ,
,
Abstract
:1. Introduction
2. Literature Review
- Building upon the foundational version of SCSO, we incorporate novel and improved operators to enhance the performance of SCSO.
- Drawing insights from the analysis of existing literature, meta-heuristic algorithms emerge as pivotal tools in optimizing machine learning efficiency. As a result, we apply ESCSO to GRNN to enhance the efficiency of fault diagnosis. This represents the first-ever combination of ESCSO and GRNN, and its effectiveness is validated through real-world industrial cases.
- In comparison to preceding research endeavors, we present a novel approach to optimal parameter calibration. This approach involves the synergy of the K-fold cross-validation technique and Taguchi’s experimental method, underpinned by the concept of relative percentage deviation.
3. Proposed Hybrid Method
3.1. Generalized Neural Network Structure
3.2. Proposed Enhanced Algorithm
3.2.1. Population Initialization
3.2.2. Sand Cat Searching for Prey (Exploration Phase)
3.2.3. Sand Cat Attacking Prey (Exploitation Phase)
3.2.4. Control of the Exploration and Exploitation Phase
3.2.5. Proposed Strategies for Improvement
- (1)
- Elite inverse learning strategy
- (2)
- Cauchy mutation
3.2.6. ESCSO Core Framework
| Algorithm 1: ESCSO pseudo-code |
| Input: Npop, t, α |
| For i = 1: Npop |
| Generate an individual xi using chaotic mapping |
| Calculate the fitness value of individual i |
| End for |
| t = 1 |
| While t ≤T |
| For i = 1: Npop |
| Randomly select an angle θ between 0 and 360 degrees for each individual |
| If R ≤ 1 |
| Update the current individual using Equation (10) |
| Else |
| Update the current individual using Equation (11) |
| End if |
| Update parameters r2, rG, and R |
| End for |
| Calculate pr |
| For i = 1: Npop |
| If pr < rand |
| Update the individual using Equation (17) |
| Else |
| Update the individual using Equation (18) |
| End if |
| End for |
| Update pr |
| t = t + 1 |
| End while |
3.3. ESCSO-GRNN Flowchart
4. Experimental Results
4.1. Data Source and Experimental Process
4.2. ESCSO-GRNN Parameters Calibration
- Divide the dataset into K = 5 subsets.
- For each parameter combination, conduct five calculations, using one subset as the test set and the other four subsets as the training set each time.
- Record the results for each calculation.
- Take the average of the five calculations to obtain the model performance metric for that parameter combination.
- Use the average to calculate the RPD for evaluating model performance.
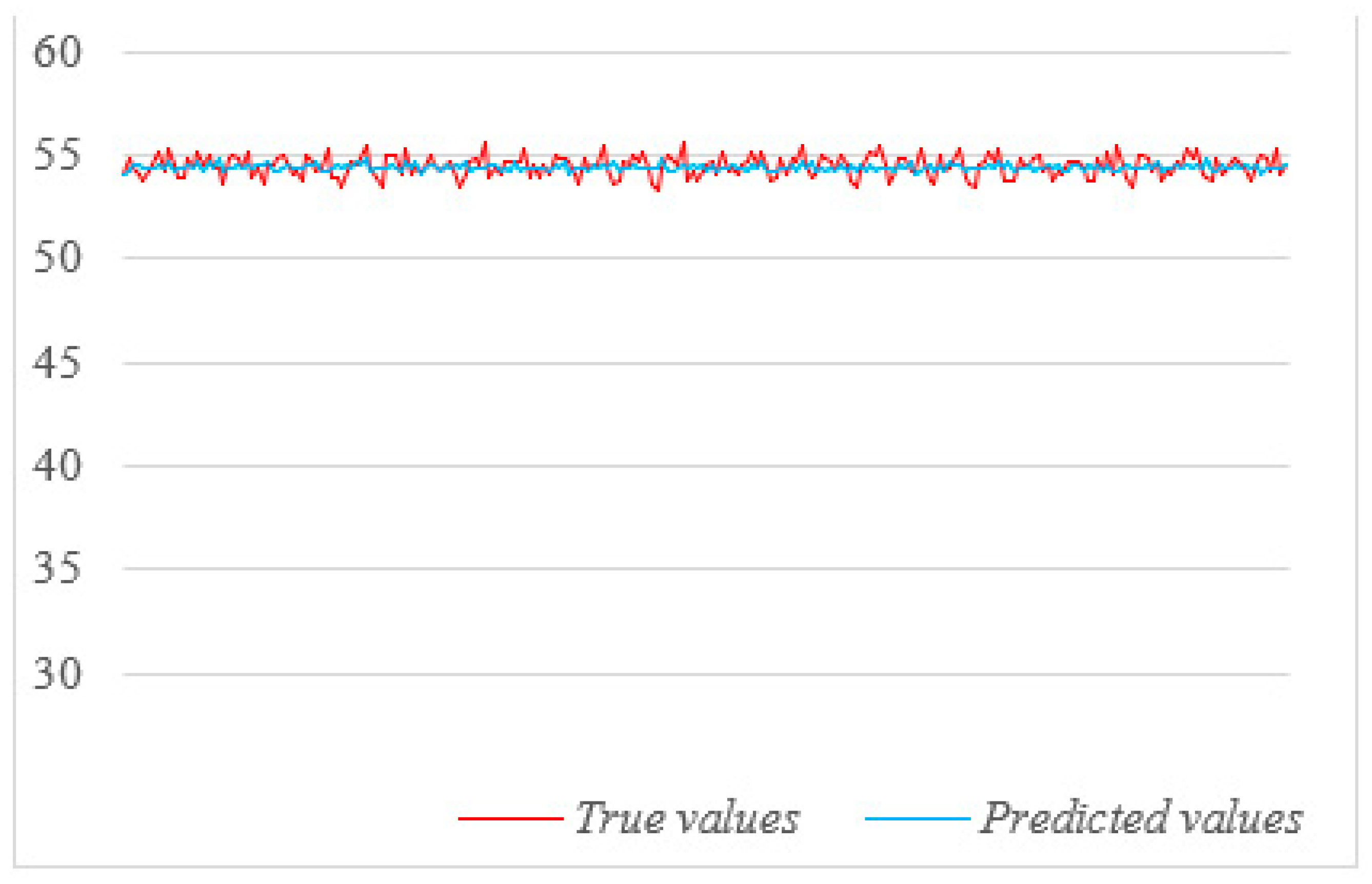
4.3. Model Training and Fault Warning Testing
5. Comparison with Other Advanced Algorithms
5.1. Comparison of Predicted Efficacy
5.2. Comparison of Fault Warning Success Rates
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tian, G.; Zhang, L.; Fathollahi-Fard, A.M.; Kang, Q.; Li, Z.; Wong, K.Y. Addressing a collaborative maintenance planning using multiple operators by a multi-objective Metaheuristic algorithm. IEEE Trans. Autom. Sci. Eng. 2023; in press. [Google Scholar] [CrossRef]
- Tao, L.; Siqi, Q.; Zhaochao, M.; Gaofeng, X. Early fault warning of wind turbine based on BRNN and large sliding window. J. Intell. Fuzzy Syst. 2020, 38, 3389–3401. [Google Scholar] [CrossRef]
- Jieyang, P.; Kimmig, A.; Dongkun, W.; Niu, Z.; Zhi, F.; Jiahai, W.; Liu, X.; Ovtcharova, J. A systematic review of data-driven approaches to fault diagnosis and early warning. J. Intell. Manuf. 2022, 1–28. [Google Scholar] [CrossRef]
- Bendu, H.; Deepak, B.B.V.L.; Murugan, S. Application of GRNN for the prediction of performance and exhaust emissions in HCCI engine using ethanol. Energy Convers. Manag. 2016, 122, 165–173. [Google Scholar] [CrossRef]
- Polat, Ö.; Yıldırım, T. Genetic optimization of GRNN for pattern recognition without feature extraction. Expert Syst. Appl. 2008, 34, 2444–2448. [Google Scholar] [CrossRef]
- Cheng, J.; Xiong, Y. The quality evaluation of classroom teaching based on FOA-GRNN. Procedia Comput. Sci. 2017, 107, 355–360. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef]
- Wu, H.; Fu, W.; Ren, X.; Wang, H.; Wang, E. A Three-Step Framework for Multimodal Industrial Process Monitoring Based on DLAN, TSQTA, and FSBN. Processes 2023, 11, 318. [Google Scholar] [CrossRef]
- Luo, Z.; Liu, C.; Liu, S. A novel fault prediction method of wind turbine gearbox based on pair-copula construction and BP neural network. IEEE Access 2020, 8, 91924–91939. [Google Scholar] [CrossRef]
- Chen, H.; Li, S.; Li, M. Multi-Channel High-Dimensional Data Analysis with PARAFAC-GA-BP for Nonstationary Mechanical Fault Diagnosis. Int. J. Turbomach. Propuls. Power 2022, 7, 19. [Google Scholar] [CrossRef]
- Jiang, H.; Yu, Z.; Wang, Y.; Zhang, B.; Song, J.; Wei, J. The state prediction method of the silk dryer based on the GA-BP model. Sci. Rep. 2022, 12, 14615. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Liu, H.; Hu, W.; Yan, X. Anomaly detection and fault analysis of wind turbine components based on deep learning network. Renew. Energy 2018, 127, 825–834. [Google Scholar] [CrossRef]
- Chen, S.; Ma, Y.; Ma, L. Fault early warning of pitch system of wind turbine based on GA-BP neural network model. E3S Web Conf. 2020, 194, 03005. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, T.; Cai, G.; Hai, K.L. Research on electric vehicle charging safety warning model based on back propagation neural network optimized by improved gray wolf algorithm. J. Energy Storage 2022, 49, 104092. [Google Scholar] [CrossRef]
- Lin, J.; Zhao, Y.; Cui, B.; Li, Z. Fault Diagnosis of Active Phase Change Control Device based on SGSSA-BP Neural Network. In Proceedings of the 2022 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 24–26 June 2022; pp. 348–353. [Google Scholar]
- Gao, D.; Wang, Y.; Zheng, X.; Yang, Q. A fault warning method for electric vehicle charging process based on adaptive deep belief network. World Electr. Veh. J. 2021, 12, 265. [Google Scholar] [CrossRef]
- Zhou, Y.; Kumar, A.; Parkash, C.; Vashishtha, G.; Tang, H.; Xiang, J. A novel entropy-based sparsity measure for prognosis of bearing defects and development of a sparsogram to select sensitive filtering band of an axial piston pump. Measurement 2022, 203, 111997. [Google Scholar] [CrossRef]
- Wang, H.; Chen, J.; Zhu, X.; Song, L.; Dong, F. Early warning of reciprocating compressor valve fault based on deep learning network and multi-source information fusion. Trans. Inst. Meas. Control 2023, 45, 777–789. [Google Scholar] [CrossRef]
- Chu, W.L.; Lin, C.J.; Kao, K.C. Fault diagnosis of a rotor and ball-bearing system using DWT integrated with SVM, GRNN, and visual dot patterns. Sensors 2019, 19, 4806. [Google Scholar] [CrossRef]
- Ji, C.; Wang, L.; Wang, X.; Li, X.; Cao, W. Design of cable tunnel fault early warning system based on MSSA-SVM. J. Eng. Des. 2023, 30, 109–116. [Google Scholar]
- Yang, Y.; Zhang, S.; Su, K.; Fang, R. Early warning of stator winding overheating fault of water-cooled turbogenerator based on SAE-LSTM and sliding window method. Energy Rep. 2023, 9, 199–207. [Google Scholar] [CrossRef]
- Peng, J.; Kimmig, A.; Niu, Z.; Wang, J.; Liu, X.; Wang, D.; Ovtcharova, J. Wind turbine failure prediction and health assessment based on adaptive maximum mean discrepancy. Int. J. Electr. Power Energy Syst. 2022, 134, 107391. [Google Scholar] [CrossRef]
- Kirbaş, I.; Kerem, A. A new vibration-based hybrid anomaly detection model for preventing high-power generator failures in power plants. Energy Sources Part A Recovery Util. Environ. Eff. 2021, 43, 3184–3202. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, Y.; Wang, Q. Fault detection in wind turbine generators using a meta-learning-based convolutional neural network. Mech. Syst. Signal Process. 2023, 200, 110528. [Google Scholar] [CrossRef]
- Li, J.; Liu, J.; Chen, Y. A fault warning for inter-turn short circuit of excitation winding of synchronous generator based on GRU-CNN. Glob. Energy Interconnect. 2022, 5, 236–248. [Google Scholar] [CrossRef]
- Niu, S.-Y.; Liu, B.-W.; Zhang, X.Y. Research on Fault Warning of doubly Fed Wind Power Generator based on LS-SVM. In Proceedings of the 3rd Annual International Conference on Electronics, Electrical Engineering and Information Science (EEEIS 2017), Guangzhou, China, 8–10 September 2017; pp. 158–163. [Google Scholar]
- Li, M.; Zhang, G.; Zhao, S. Research on the Pit Overall Stability Intelligent Forecasting and Early Warning Method Based on GRNN. Recent Pat. Comput. Sci. 2016, 9, 68–73. [Google Scholar] [CrossRef]
- Kaminski, M.; Kowalski, C.T.; Orlowska-Kowalska, T. General regression neural networks as rotor fault detectors of the induction motor. In Proceedings of the 2010 IEEE International Conference on Industrial Technology, Vina del Mar, Chile, 14–17 March 2010; pp. 1239–1244. [Google Scholar]
- Chen, B.; Xu, W.; Huang, Y.; Cao, G.; Guan, S.; Yue, J. A predictive model for coal mill safety assessment based on PCA-GRNN. Clean Coal Technol. 2022, 28, 206–214. [Google Scholar]
- Liu, X.; Dong, J.; Tu, G. Research on Fan Operation Evaluation and Error State Judgment Relying on Improved Neural Network and Intelligent Computing. J. Phys. Conf. Ser. 2021, 2083, 042005. [Google Scholar] [CrossRef]
- Qi, Y.; Jing, T.; Ren, C.; Gao, X. Three-Stage Wind Turbine Assessment Method: Condition Monitoring, Failure Prediction, And Health Assessment. Res. Sq. 2021. [Google Scholar] [CrossRef]
- Tongmei, J.I.N.G.; Yongsheng, Q.; Liqiang, L. Condition monitoring and health assessment of wind turbine gearbox based on KECA-GRNN. Acta Energiae Solaris Sin. 2021, 42, 400–408. [Google Scholar]
- Specht, D.F. A general regression neural network. IEEE Trans. Neural Netw. 1991, 2, 568–576. [Google Scholar] [CrossRef]
- Tian, G.; Zhang, C.; Fathollahi-Fard, A.M.; Li, Z.; Zhang, C.; Jiang, Z. An enhanced social engineering optimizer for solving an energy-efficient disassembly line balancing problem based on bucket brigades and cloud theory. IEEE Trans. Ind. Inform. 2022, 19, 7148–7159. [Google Scholar] [CrossRef]
- Seyyedabbasi, A.; Kiani, F. Sand Cat swarm optimization: A nature-inspired algorithm to solve global optimization problems. Eng. Comput. 2023, 39, 2627–2651. [Google Scholar] [CrossRef]
- Jovanovic, D.; Marjanovic, M.; Antonijevic, M.; Zivkovic, M.; Budimirovic, N.; Bacanin, N. Feature selection by improved sand cat swarm optimizer for intrusion detection. In Proceedings of the 2022 International Conference on Artificial Intelligence in Everything (AIE), Lefkosa, Cyprus, 2–4 August 2022; pp. 685–690. [Google Scholar]
- Qtaish, A.; Albashish, D.; Braik, M.; Alshammari, M.T.; Alreshidi, A.; Alreshidi, E.J. Memory-based Sand Cat Swarm Optimization for Feature Selection in Medical Diagnosis. Electronics 2023, 12, 2042. [Google Scholar] [CrossRef]
- Li, Y.; Han, M.; Guo, Q. Modified whale optimization algorithm based on tent chaotic mapping and its application in structural optimization. KSCE J. Civ. Eng. 2020, 24, 3703–3713. [Google Scholar] [CrossRef]
- Chen, S.; Wang, S. An optimization method for an integrated energy system scheduling process based on NSGA-II improved by tent mapping chaotic algorithms. Processes 2020, 8, 426. [Google Scholar] [CrossRef]
- Gao, Z.-M.; Zhao, J.; Hu, Y.-R.; Chen, H.F. The improved Harris hawk optimization algorithm with the Tent map. In Proceedings of the 2019 3rd International Conference on Electronic Information Technology and Computer Engineering (EITCE), Xiamen, China, 18–20 October 2019; pp. 336–339. [Google Scholar]
- Varol Altay, E.; Alatas, B. Bird swarm algorithms with chaotic mapping. Artif. Intell. Rev. 2020, 53, 1373–1414. [Google Scholar] [CrossRef]
- Gao, Z.-M.; Zhao, J.; Li, S.-R.; Hu, R.-R. The improved equilibrium optimization algorithm with tent map. In Proceedings of the 2020 5th international conference on computer and communication systems (ICCCS), Shanghai, China, 15–18 May 2020; pp. 343–346. [Google Scholar]
- Zheng, X.; Li, X.; Li, Y.; Liu, Y. An improved artificial bee Colony algorithm based on cat mapping and differential variation. J. Data Inf. Manag. 2022, 4, 119–135. [Google Scholar] [CrossRef]
- Fathollahi-Fard, A.M.; Dulebenets, M.A.; Hajiaghaei–Keshteli, M.; Tavakkoli-Moghaddam, R.; Safaeian, M.; Mirzahosseinian, H. Two hybrid meta-heuristic algorithms for a dual-channel closed-loop supply chain network design problem in the tire industry under uncertainty. Adv. Eng. Inform. 2021, 50, 101418. [Google Scholar] [CrossRef]
- Fathollahi-Fard, A.M.; Tian, G.; Ke, H.; Fu, Y.; Wong, K.Y. Efficient Multi-objective Metaheuristic Algorithm for Sustainable Harvest Planning Problem. Comput. Oper. Res. 2023, 158, 106304. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, H.; Fu, C.; Mi, M.; Zhan, C.; Pham, D.T.; Fathollahi-Fard, A.M. Application and planning of an energy-oriented stochastic disassembly line balancing problem. Environ. Sci. Pollut. Res. 2023, 1–15. [Google Scholar] [CrossRef]
- Ling, H.; Qian, C.; Kang, W.; Liang, C.; Chen, H. Combination of Support Vector Machine and K-Fold cross validation to predict compressive strength of concrete in marine environment. Constr. Build. Mater. 2019, 206, 355–363. [Google Scholar] [CrossRef]
- Zhu, Y. Research on early warning of induced draft fan failure in thermal power plant based on SSA-XGBoost. Qinghai Electr. Power 2022, 41, 37–41,49. [Google Scholar]
- Liu, J.; Zhan, C.; Wang, H.; Zhang, X.; Liang, X.; Zheng, S.; Meng, Z.; Zhou, G. Developing a Hybrid Algorithm Based on an Equilibrium Optimizer and an Improved Backpropagation Neural Network for Fault Warning. Processes 2023, 11, 1813. [Google Scholar] [CrossRef]
- Fathollahi-Fard, A.M.; Hajiaghaei-Keshteli, M.; Tavakkoli-Moghaddam, R. The social engineering optimizer (SEO). Eng. Appl. Artif. Intell. 2018, 72, 267–293. [Google Scholar] [CrossRef]
- Tian, G.; Lu, W.; Zhang, X.; Zhan, M.; Dulebenets, M.A.; Aleksandrov, A.; Fathollahi-Fard, A.M.; Ivanov, M. A survey of multi-criteria decision-making techniques for green logistics and low-carbon transportation systems. Environ. Sci. Pollut. Res. 2023, 30, 57279–57301. [Google Scholar] [CrossRef] [PubMed]
- Tian, G.; Yuan, G.; Aleksandrov, A.; Zhang, T.; Li, Z.; Fathollahi-Fard, A.M.; Ivanov, M. Recycling of spent Lithium-ion Batteries: A comprehensive review for identification of main challenges and future research trends. Sustain. Energy Technol. Assess. 2022, 53, 102447. [Google Scholar] [CrossRef]
- Qiao, L.; Wang, Z.; Zhu, J. Application of improved GRNN model to predict interlamellar spacing and mechanical properties of hypereutectoid steel. Mater. Sci. Eng. A 2020, 792, 139845. [Google Scholar] [CrossRef]
- Chen, Y.; Shen, L.; Li, R.; Xu, X.; Hong, H.; Lin, H.; Chen, J. Quantification of interfacial energies associated with membrane fouling in a membrane bioreactor by using BP and GRNN artificial neural networks. J. Colloid Interface Sci. 2020, 565, 1–10. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, C. An online-learning-based evolutionary many-objective algorithm. Inf. Sci. 2020, 509, 1–21. [Google Scholar] [CrossRef]
- Pasha, J.; Nwodu, A.L.; Fathollahi-Fard, A.M.; Tian, G.; Li, Z.; Wang, H.; Dulebenets, M.A. Exact and metaheuristic algorithms for the vehicle routing problem with a factory-in-a-box in multi-objective settings. Adv. Eng. Inform. 2022, 52, 101623. [Google Scholar] [CrossRef]
- Dulebenets, M.A. A Diffused Memetic Optimizer for reactive berth allocation and scheduling at marine container terminals in response to disruptions. Swarm Evol. Comput. 2023, 80, 101334. [Google Scholar] [CrossRef]
- Singh, E.; Pillay, N. A study of ant-based pheromone spaces for generation constructive hyper-heuristics. Swarm Evol. Comput. 2022, 72, 101095. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Methodology | Application | Key Findings/Contributions |
|---|---|---|---|
| Luo et al. [9] | Conditional mutual info + BPNN | Wind turbine maintenance | Enhanced reliability with conditional mutual information. |
| Chen et al. [10] | Parallel factor decomp + GA | Mechanical fault diagnosis | Improved efficiency using PARAFAC and genetic algorithms. |
| Jiang et al. [11] | Genetic algorithm + BPNN | Silk dryer maintenance | Optimized neural network nodes for improved predictions. |
| Zhao et al. [12] | Deep autoencoder network | Wind turbine health monitoring | Early fault warnings and accurate fault location identification. |
| Chen et al. [13] | Genetic algorithm + BPNN | Wind turbine pitch system fault warning | Enhanced early warning capability. |
| Zhang et al. [14] | IWOA + BPNN | EV charging safety early warnings | Reliable and real-time abnormal state detection. |
| Lin et al. [15] | SSA+ BPNN | Stratospheric lighter-than-air aircraft | Significant improvement in fault classification accuracy. |
| Gao et al. [16] | Adaptive deep belief networks + Charging data | EV charging process | Accurate fault prediction, outperforming traditional methods. |
| Zhou et al. [17] | Entropy-based sparsity + LSTM network | Hydraulic machinery bearing fault pred. | Effective tool for fault monitoring and diagnosis. |
| Wang et al. [18] | Multi-stage fusion LSTM network | Compressor valve faults | Higher parameter prediction accuracy with reduced complexity. |
| Liu et al. [19] | Support vector machines + GRNN | Motor fault detection | Real-time motor fault diagnosis and early warning system. |
| Ji et al. [20] | MSSA+ optimized SVM | Cable Tunnel Environment Monitoring | Significant accuracy improvement for generator fault warning |
| Yang et al. [21] | Sparse AE+ LSTM+ Sliding Window | Water-Cooled Steam Turbine Generator Stator Winding Overheating Warning | More accurate early-stage stable warnings |
| Peng et al. [22] | Convolutional Network+ Adaptive Max Mean Deviation | Wind Turbine Generator Fault Warning | Higher fault prediction, lower false alarms |
| Kirbaş et al. [23] | Multivariate Linear Regression+ Response Surface+ MLP | High-Power Generator Fault Detection | Hybrid model for improved fault detection |
| Qiao et al. [24] | Meta-Learning+ CNN | Wind Turbine Generator Fault Warning | Early fault detection across different units |
| Li et al. [25] | Improved Hybrid PSO+ CNN | Synchronous Generator Fault Warning | Enhanced stability through optimized CNN model |
| Niu et al. [26] | Least Squares Hybrid SVM | Doubly-Fed Wind Turbine Group Fault Warning | Accurate fault estimation, timely identification |
| Li et al. [27] | GRNN-based Intelligent Warning for Mines | Overall Stability Forecast for Mines | Improved mine stability prediction with intelligent warning |
| Kaminski et al. [28] | GRNN | Motor Rotor Fault Monitoring | Effective motor rotor fault monitoring |
| Chen et al. [29] | PCA-GRNN | Coal Mill Safety Assessment Prediction | Lower cost, higher accuracy in coal mill safety prediction |
| Liu et al. [30] | GRNN | Wind Turbine Group Performance Prediction and Sliding Window Fault Warning | Superior performance in predicting turbine group performance |
| Qi et al. [31] | KECA+ GRNN | Wind Turbine Health Monitoring and Fault Warning | Early warnings for turbine health and faults using KECA and GRNN |
| Jing et al. [32] | KECA + GRNN | Wind Turbine Gearbox Fault Monitoring and Warning | Enhanced fault warning through hybrid KECA and GRNN |
| Software 1 | MATLAB R2018b |
|---|---|
| Operating System | Windows |
| CPU | Intel® Core™ i7 |
| CPU Clock Speed | 2.5 GHz |
| Architecture | 64-bit |
| Memory | 8 GB |
| Fault Types | Main Measurement Points | Fault Cause |
|---|---|---|
| Loose stator core | Stator core horizontal vibration Vertical vibration of stator core Stator core temperature | Material quality is not qualified, size error, silicon steel sheet aging, improper design, production process problems, poor installation quality |
| Loose stator tooth plate | Stator core vertical vibration Stator core horizontal vibration Stator tooth plate temperature Stator core temperature | Long-term poor environmental operation High-temperature thermal fatigue, frequent start and stop, overload operation |
| Stator overload | Stator current Stator winding temperature Stator core temperature Stator hot air temperature | Excessive resistance, poor wiring of stator winding, aging of insulation |
| Parameters | Level 1 | Level 2 | Level 3 | Level 4 |
|---|---|---|---|---|
| Npop | 20 | 30 | 40 | 50 |
| T | 50 | 100 | 150 | 200 |
| α | 0.4 | 0.45 | 0.5 | 0.55 |
| Experiment No. | Npop | T | α | RPD |
|---|---|---|---|---|
| 1 | 1 | 1 | 1 | 0.15879 |
| 2 | 1 | 2 | 2 | 0.13800 |
| 3 | 1 | 3 | 3 | 0.117996 |
| 4 | 1 | 4 | 4 | 0.131631 |
| 5 | 2 | 1 | 2 | 0.11995 |
| 6 | 2 | 2 | 1 | 0.07946 |
| 7 | 2 | 3 | 4 | 0.07176 |
| 8 | 2 | 4 | 3 | 0.08137 |
| 9 | 3 | 1 | 3 | 0.09732 |
| 10 | 3 | 2 | 4 | 0.09540 |
| 11 | 3 | 3 | 1 | 0.10928 |
| 12 | 3 | 4 | 2 | 0 |
| 13 | 4 | 1 | 4 | 0.08622 |
| 14 | 4 | 2 | 3 | 0.08190 |
| 15 | 4 | 3 | 2 | 0.07140 |
| 16 | 4 | 4 | 1 | 0.06161 |
| Type of Faults | Accuracy Rate |
|---|---|
| Loose stator core | 53/60 (88%) |
| Loose stator tooth plate | 56/60 (93%) |
| Stator overload | 55/60 (92%) |
| IEO-BP | Fun1 = Tanh, Fun2 = ReLU, NL = 11, I = 0.92, T = 10 Maxit = 200, Npop = 50, Submit = 30, T1 = 1200, T0 = 100 A = 0.92, Number of BP network training = 1000 Training error = 0.02 Learning rate = 0.001 |
| SSA-XGBoost, | Maximum number of iterations = 200, Population size = 50, Safety value = 0.8, Percentage of discoverers is = 65%, Percentage of alerts = 30% |
| SCSO-GRNN | Maximum number of iterations = 200, Population size = 50 |
| GA- GRNN | Maximum number of iterations = 200, Population size = 50, Crossover probability = 0.78, Mutation probability = 0.05 |
| SEO-GRNN | Maximum number of iterations = 200, Population size = 50, α = 0.8, β = |
| GA-BP | Maximum number of iterations = 200, Population size = 50 Crossover probability=0.81, Mutation probability = 0.13, Input layer to implicit layer activation function = Softsign Implicit layer to output layer activation function = ReLU Number of neurons in the hidden layer = 10 Number of BP network training = 1000 Training error = 0.02 Learning rate = 0.001 |
| MSSA-SVM | Maximum number of iterations = 200, Population size =50, Safety value is 0.6, Percentage of discoverers = 70%, Percentage of alerts = 20%, Number of K-fold crossings = 5 |
| Algorithms | RMSE | R2 | CPU/s |
|---|---|---|---|
| IEO-BP | 79.54 | 0.93 | 8.72 |
| SSA-XGBoost | 80.90 | 0.91 | 9.36 |
| SCSO-GRNN | 83.72 | 0.88 | 6.02 |
| ESCSO-GRNN | 76.89 | 0.97 | 6.65 |
| GA-GRNN | 79.48 | 0.92 | 8.59 |
| SEO-GRNN | 79.06 | 0.91 | 9.24 |
| GA-BP | 81.32 | 0.93 | 9.27 |
| MSSA-SVM | 78.02 | 0.95 | 10.20 |
| Type of Faults | IEO-BP | SSA-XGBoost | SCSO-GRNN | ESCSO-GRNN |
| Loose stator core | 50/60 (83%) | 51/60(85%) | 49/60(81%) | 53/60 (88%) |
| Loose stator tooth plate | 52/60 (86%) | 50/60(83%) | 50/60(83%) | 56/60 (93%) |
| Stator overload | 53/60 (88%) | 49/60(81%) | 47/60(78%) | 55/60 (92%) |
| Type of Faults | GA-GRNN | SEO-GRNN | GA-BP | MSSA-SVM |
| Loose stator core | 51/60 (85%) | 53/60(88%) | 50/60(83%) | 49/60 (82%) |
| Loose stator tooth plate | 53/60 (88%) | 52/60(86%) | 51/60(85%) | 53/60 (88%) |
| Stator overload | 53/60 (88%) | 52/60(86%) | 53/60(88%) | 55/60 (92%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pi, Y.; Tan, Y.; Golmohammadi, A.-M.; Guo, Y.; Xiao, Y.; Chen, Y. A Fault Warning Approach Using an Enhanced Sand Cat Swarm Optimization Algorithm and a Generalized Neural Network. Processes 2023, 11, 2543. https://doi.org/10.3390/pr11092543
Pi Y, Tan Y, Golmohammadi A-M, Guo Y, Xiao Y, Chen Y. A Fault Warning Approach Using an Enhanced Sand Cat Swarm Optimization Algorithm and a Generalized Neural Network. Processes. 2023; 11(9):2543. https://doi.org/10.3390/pr11092543
Chicago/Turabian StylePi, Youchun, Yun Tan, Amir-Mohammad Golmohammadi, Yujing Guo, Yanfeng Xiao, and Yan Chen. 2023. "A Fault Warning Approach Using an Enhanced Sand Cat Swarm Optimization Algorithm and a Generalized Neural Network" Processes 11, no. 9: 2543. https://doi.org/10.3390/pr11092543
APA StylePi, Y., Tan, Y., Golmohammadi, A.-M., Guo, Y., Xiao, Y., & Chen, Y. (2023). A Fault Warning Approach Using an Enhanced Sand Cat Swarm Optimization Algorithm and a Generalized Neural Network. Processes, 11(9), 2543. https://doi.org/10.3390/pr11092543