The Application of a Fisheye Lens in the Automatic Alignment of Wireless Optical Communication

Abstract
1. Introduction
2. Design of an Auto-Alignment System for Wireless Optical Communication
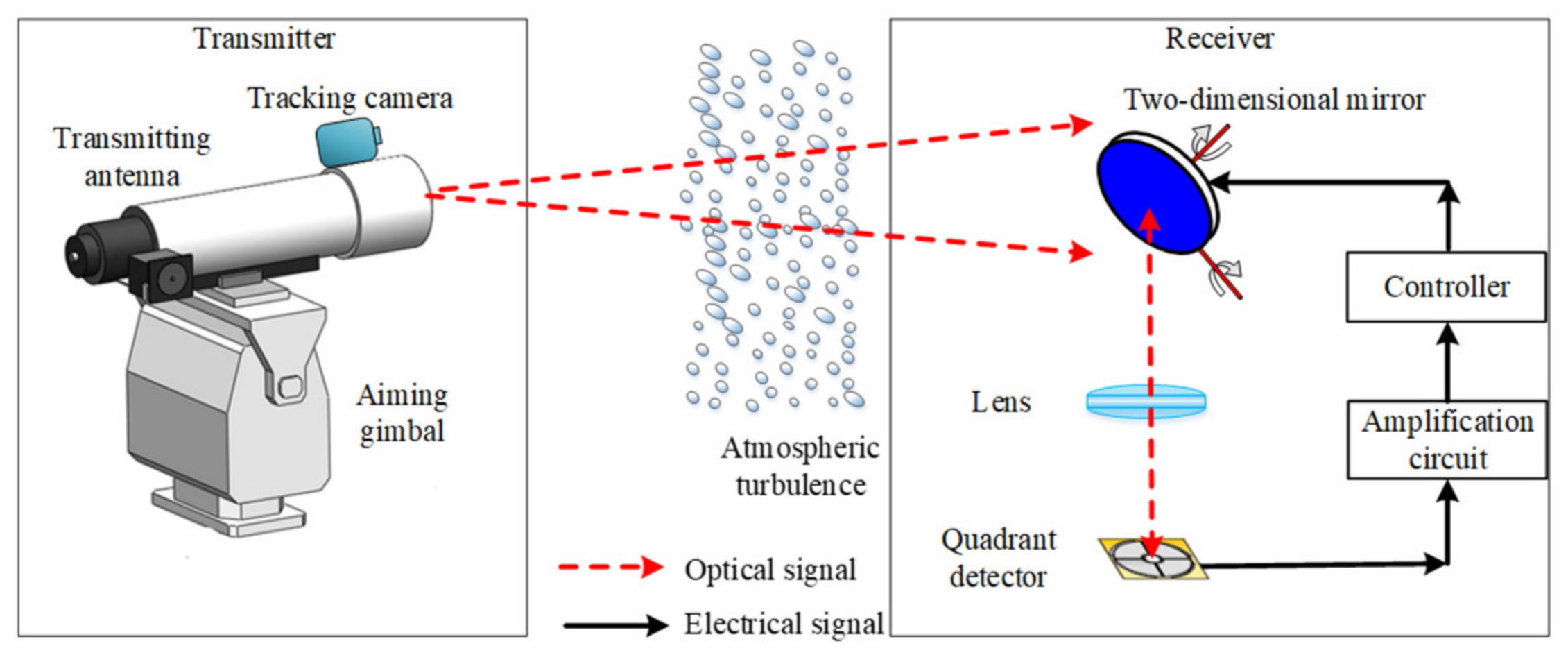
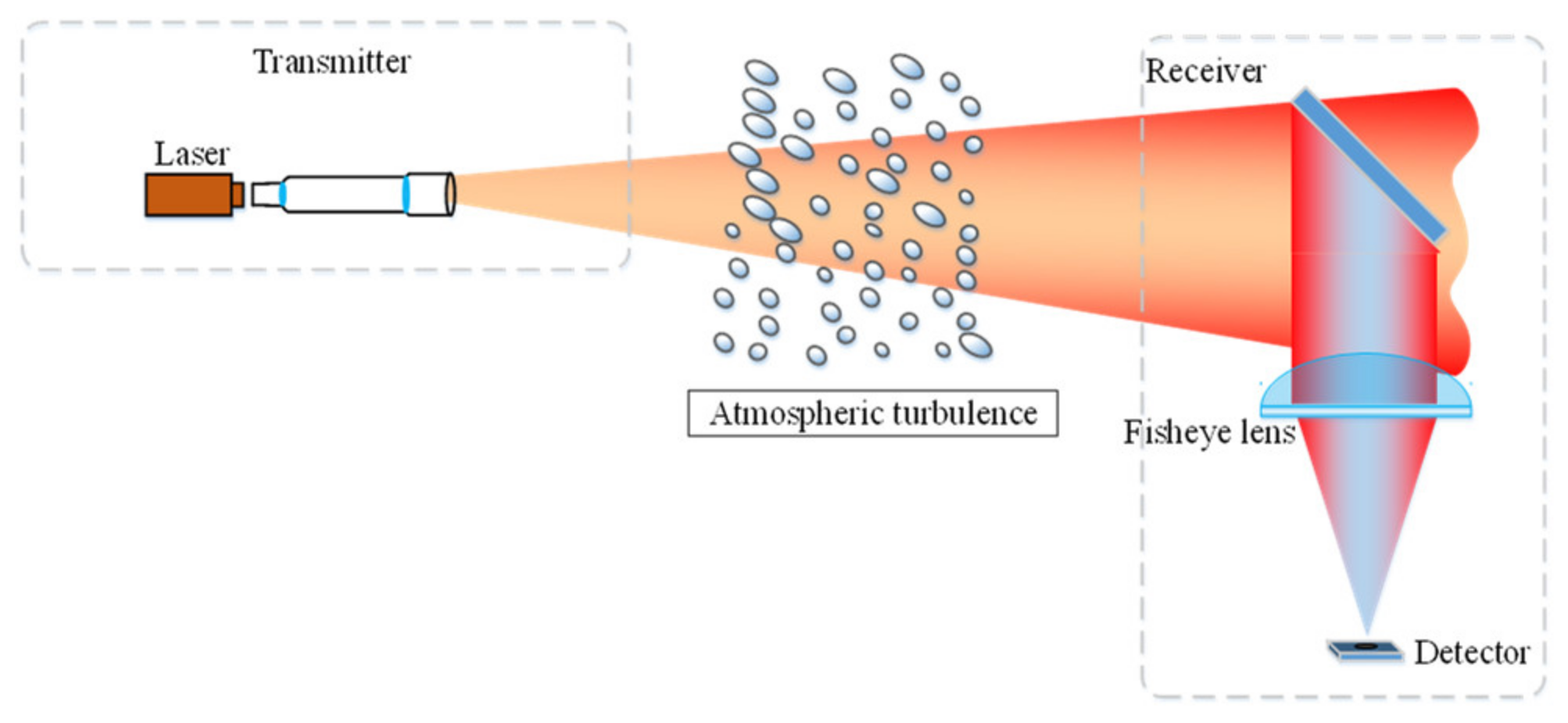
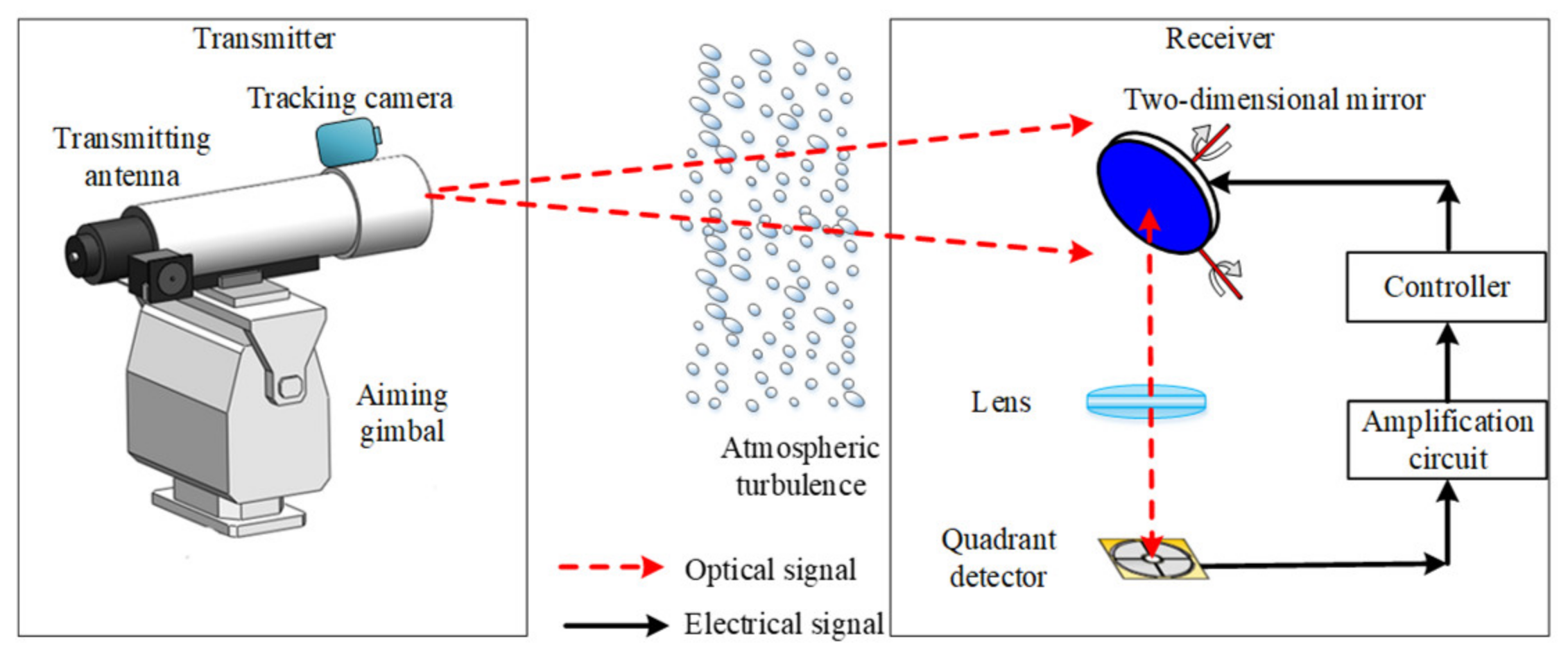
2.1. Design of the System
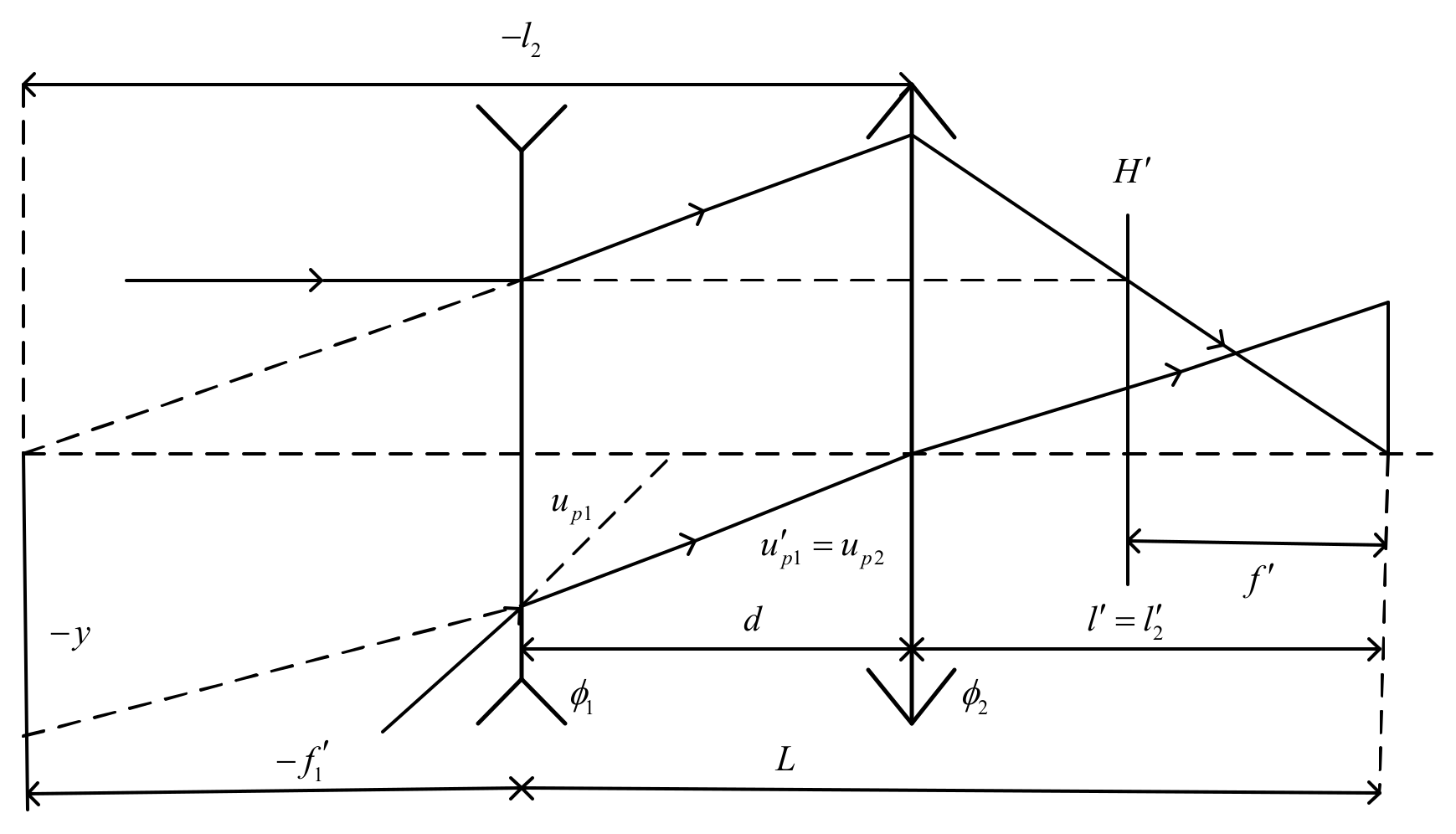
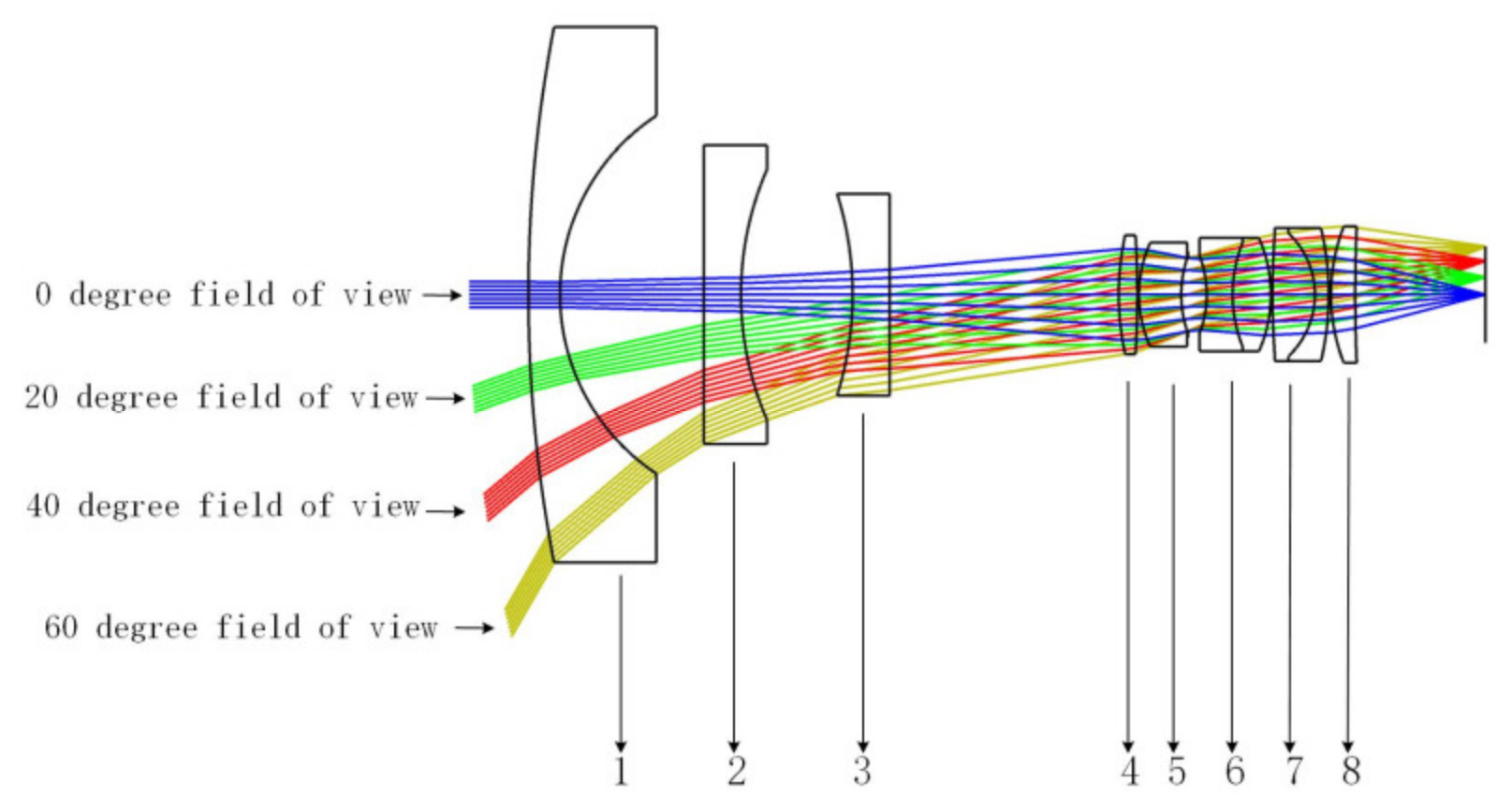
2.2. Optical Unit
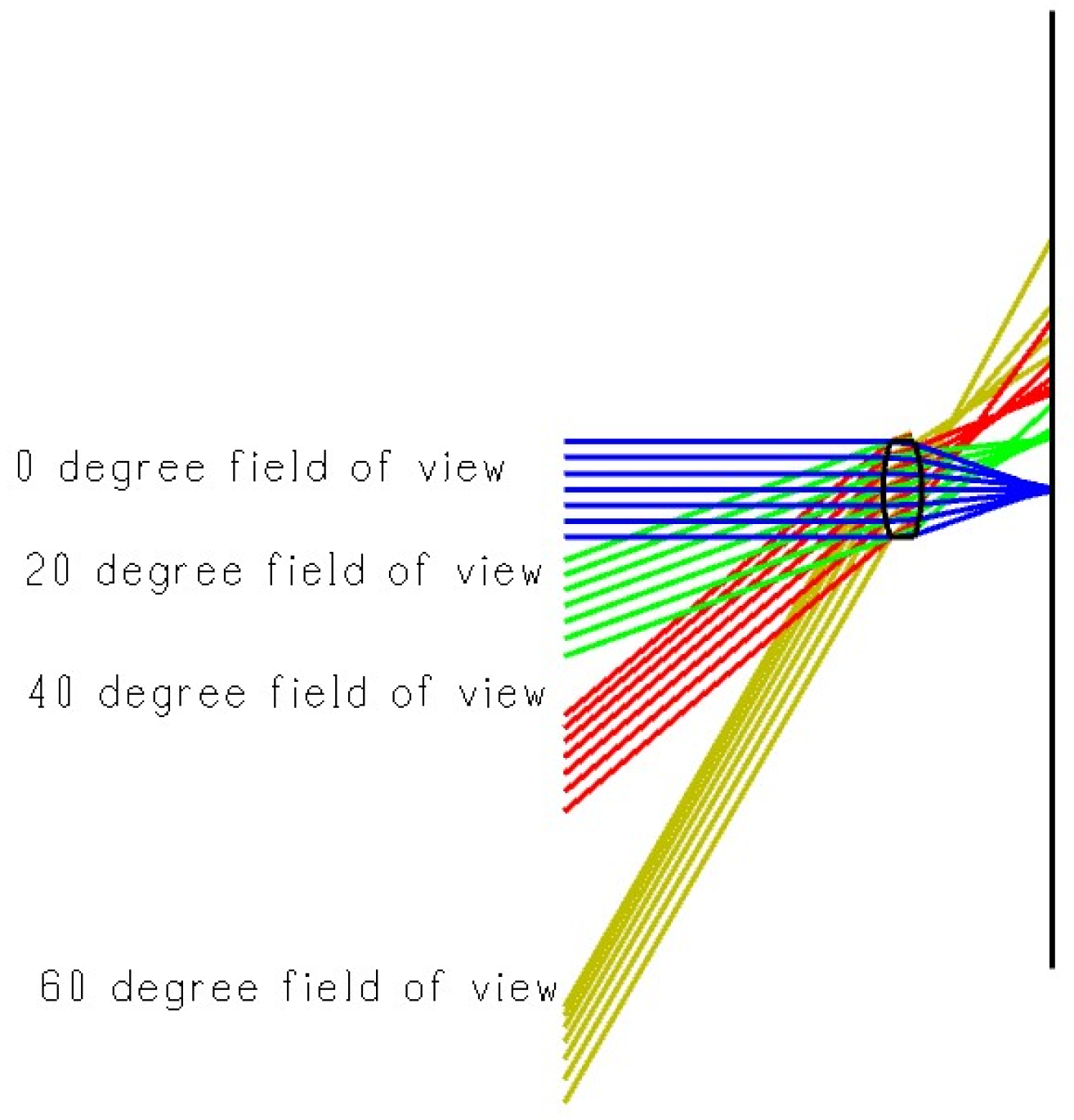
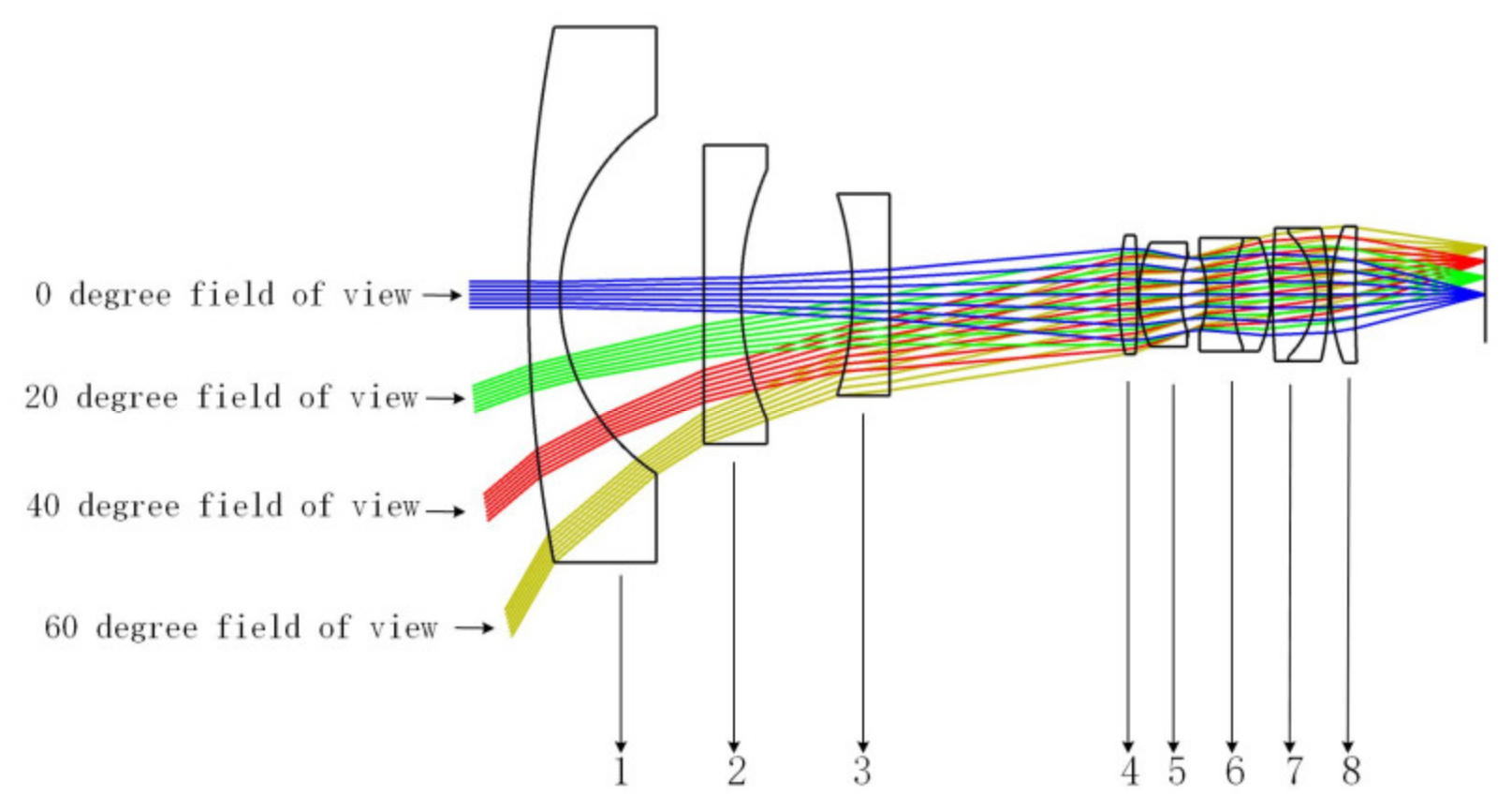
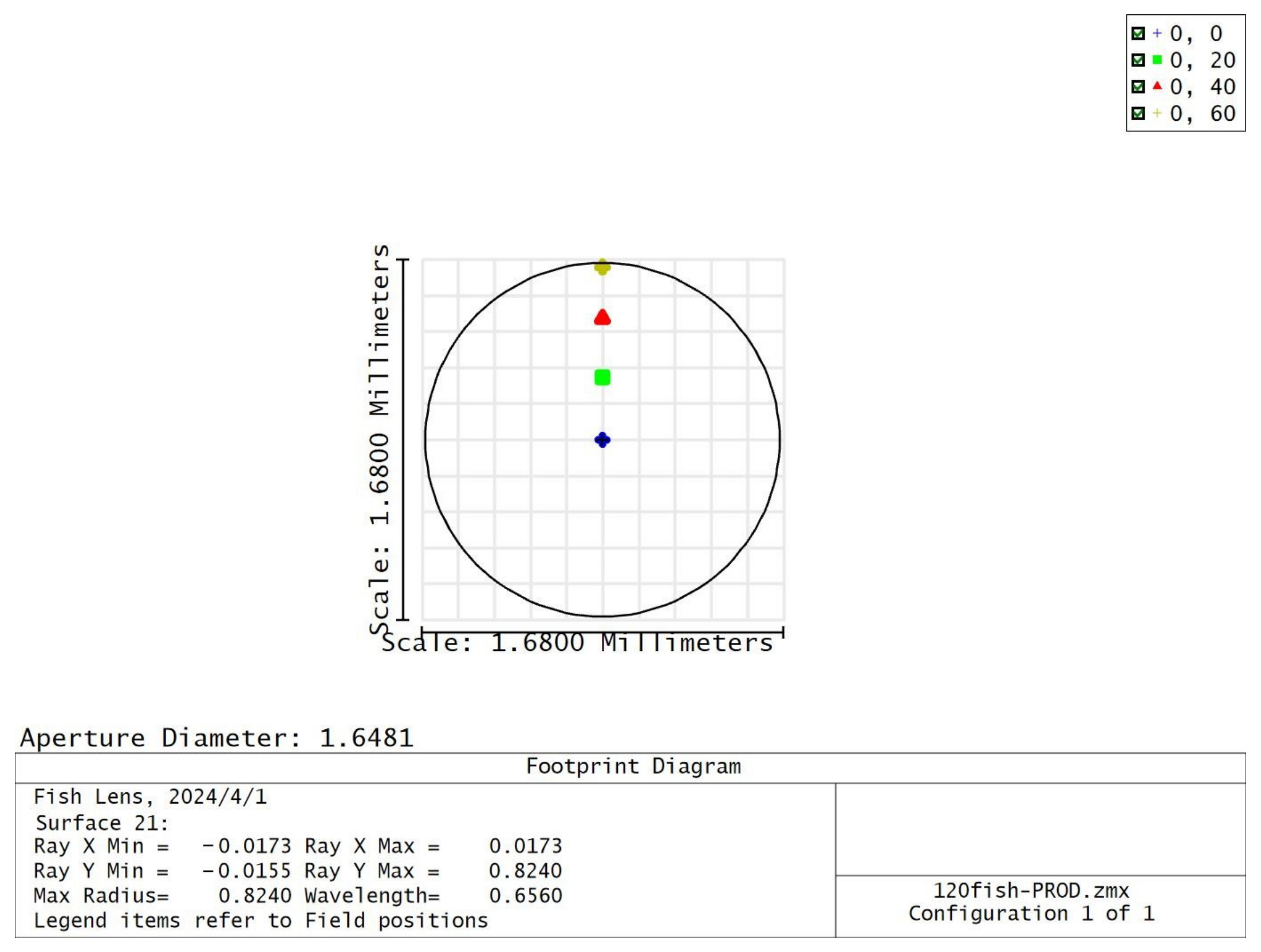
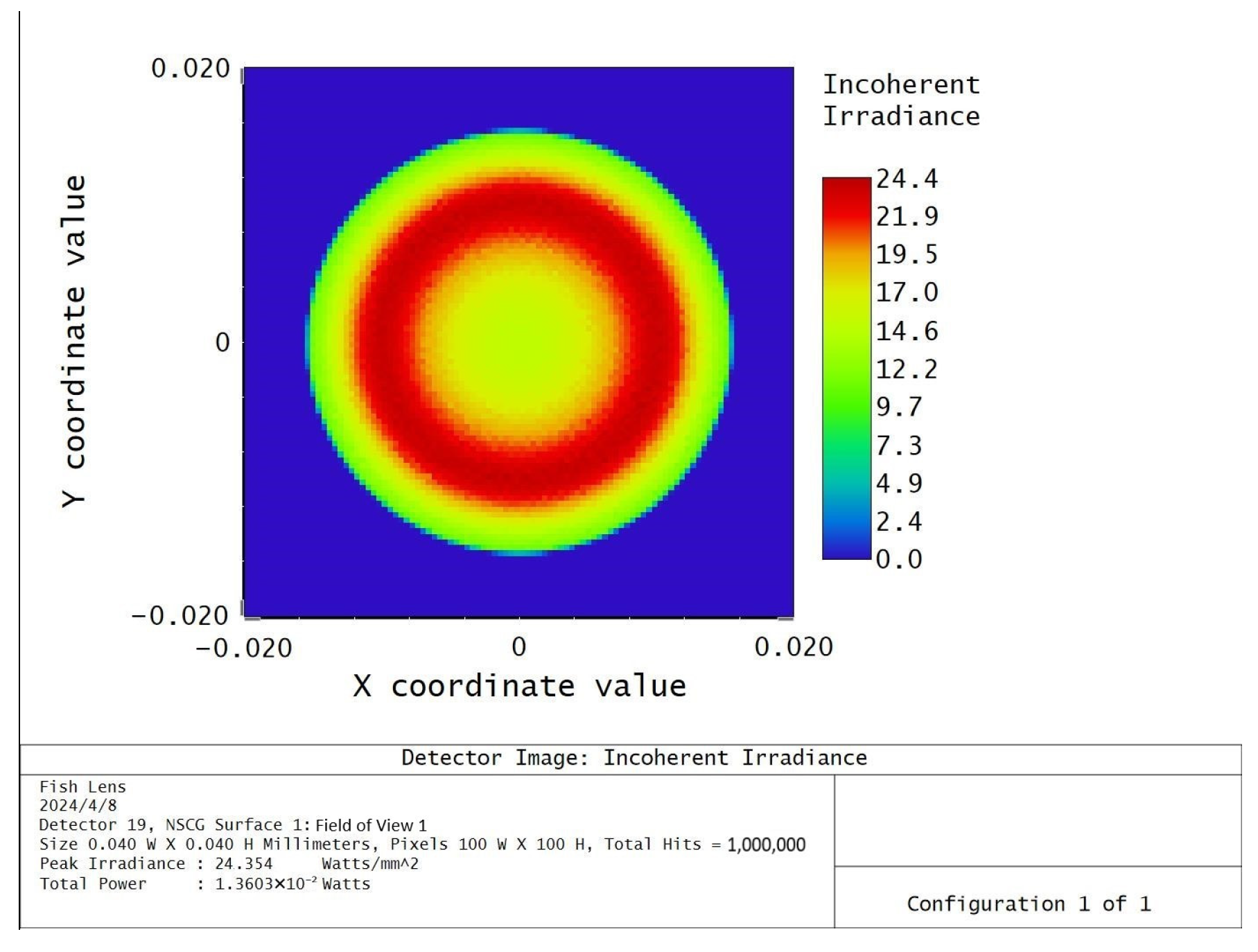
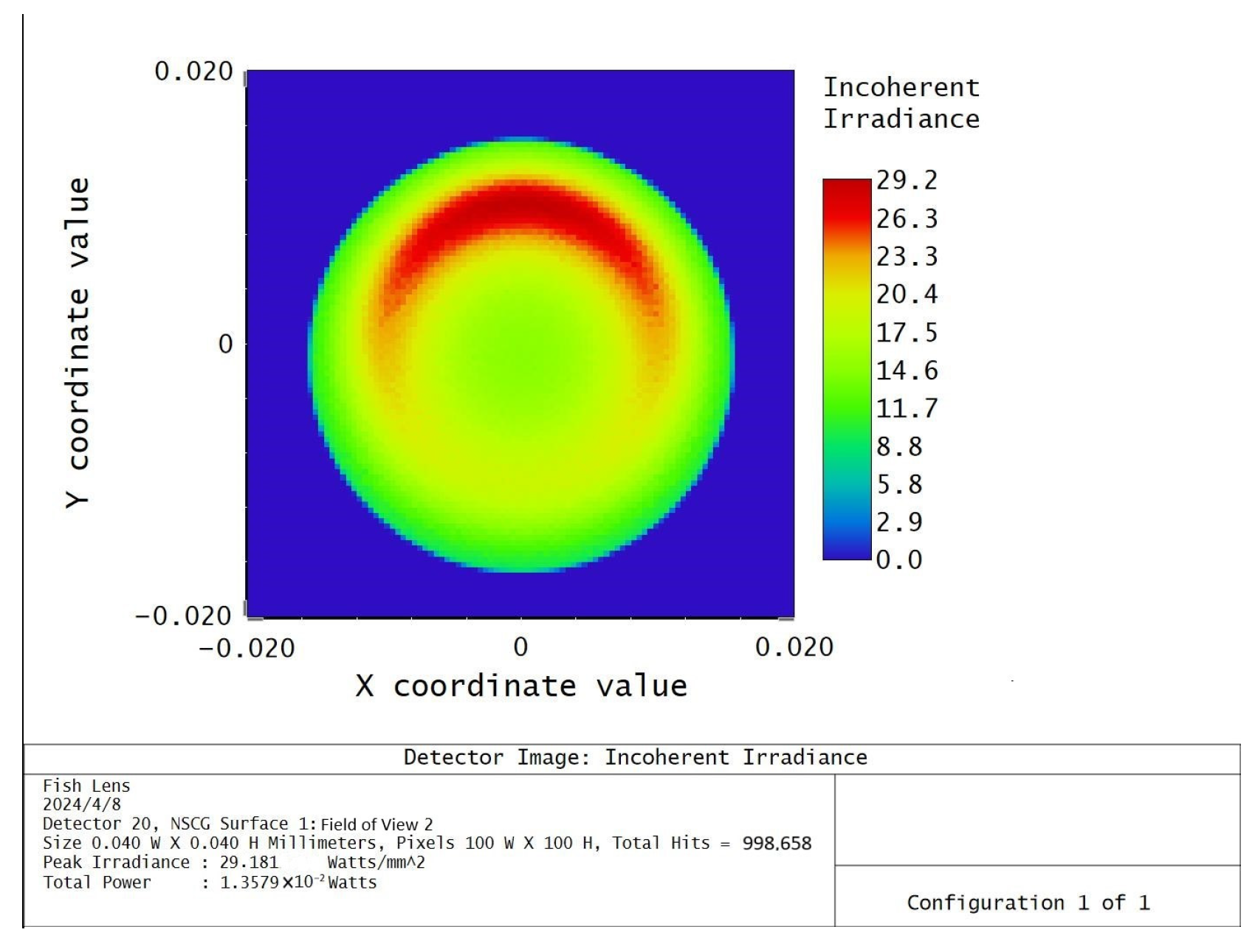
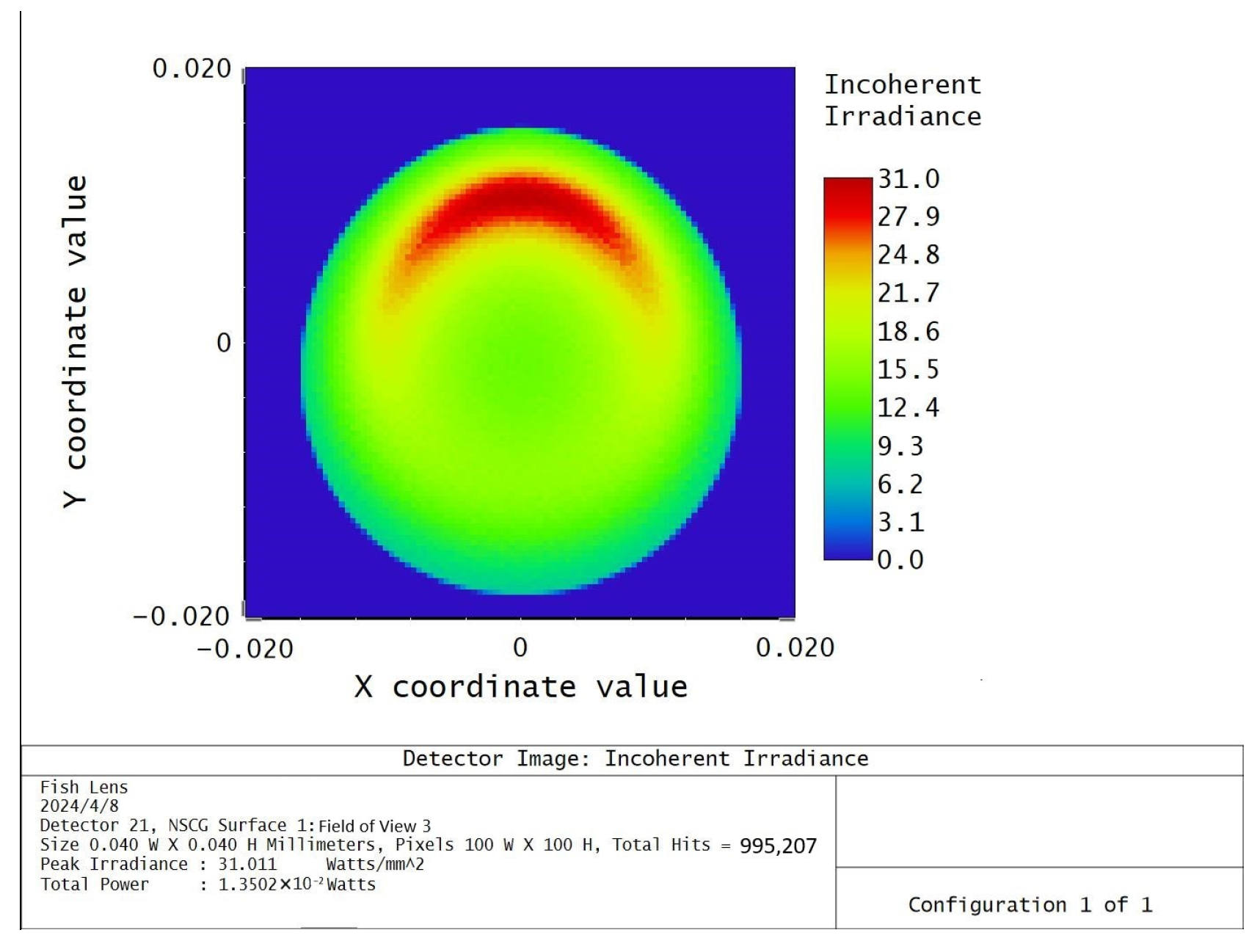
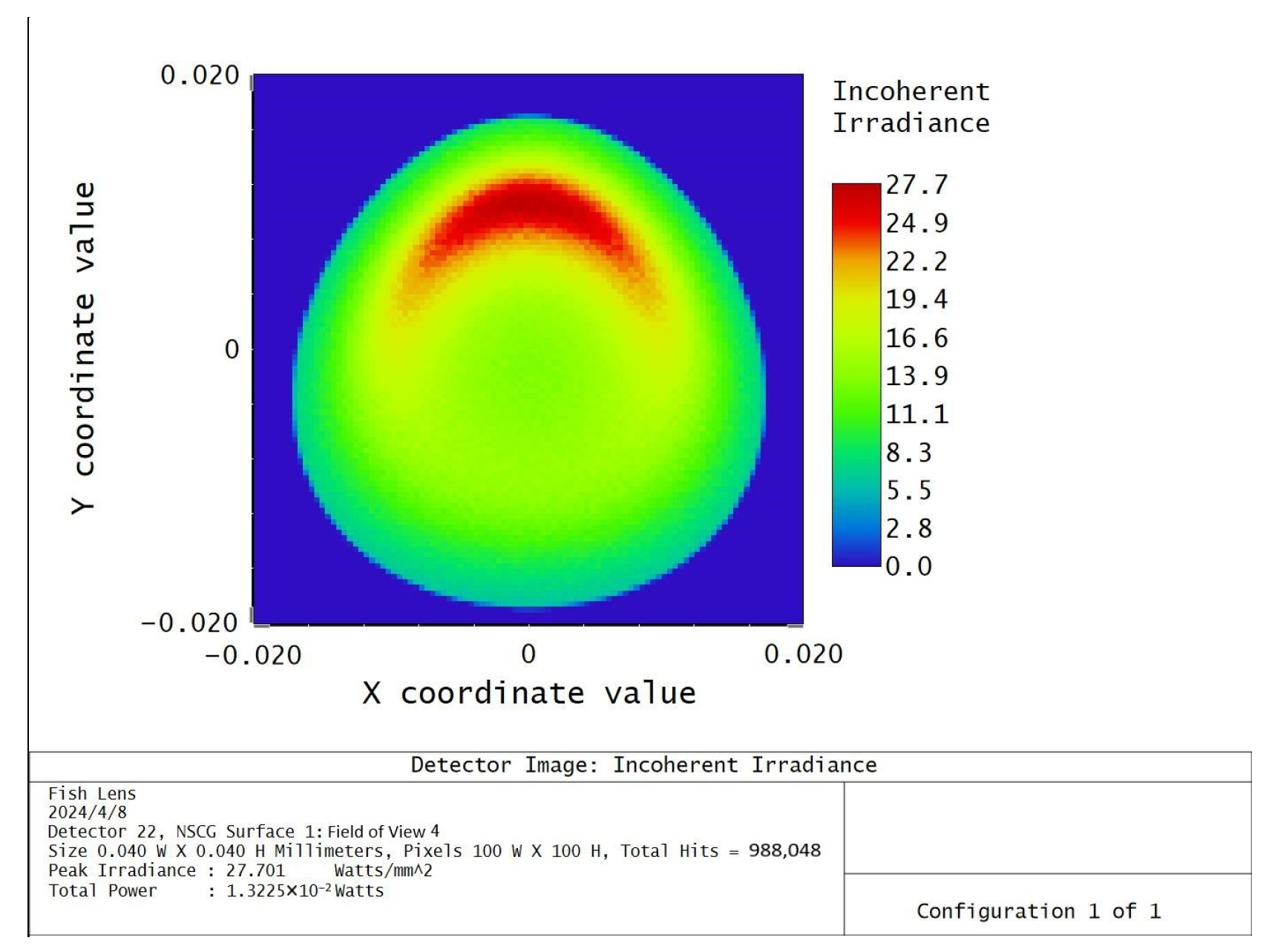
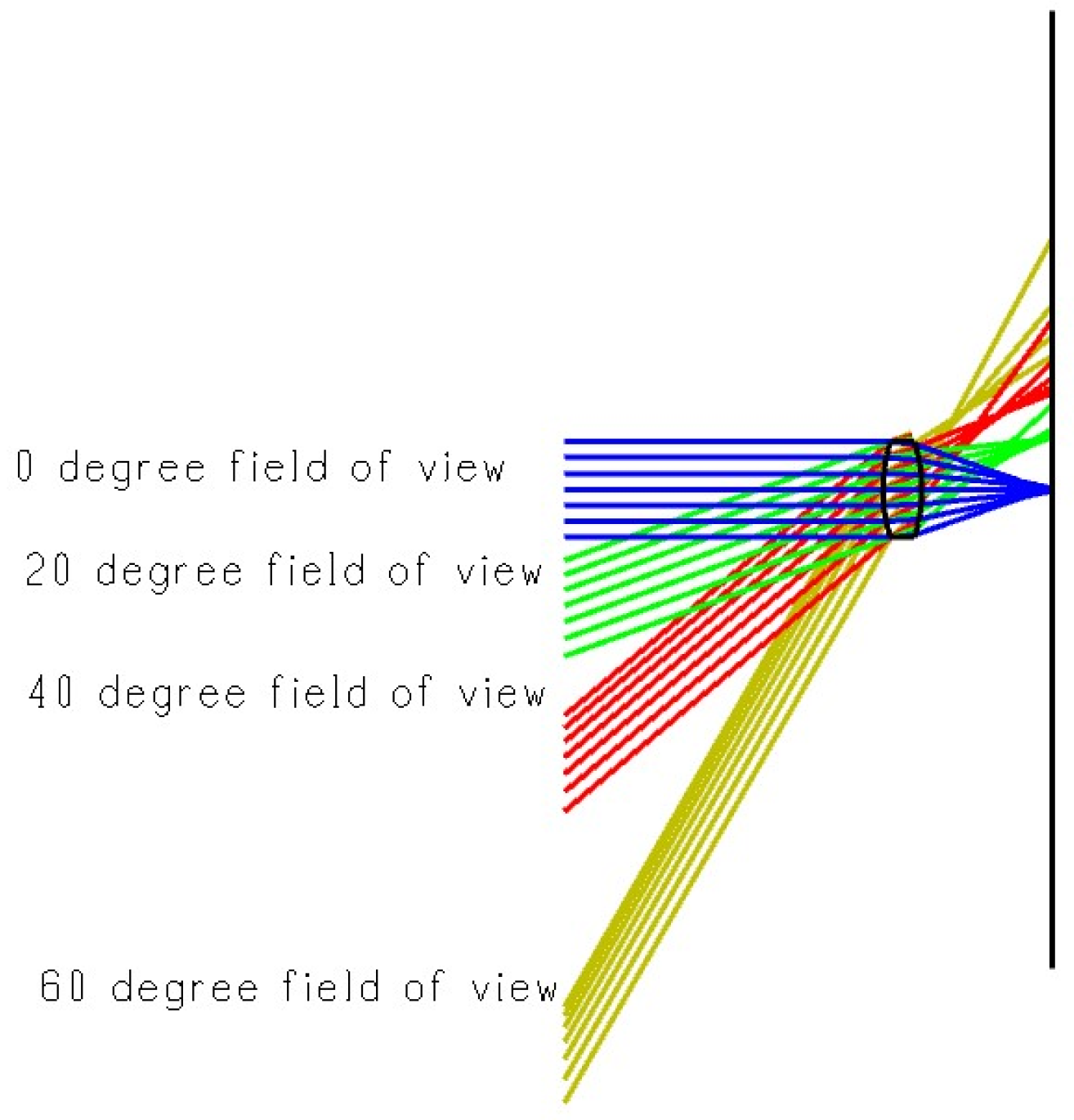
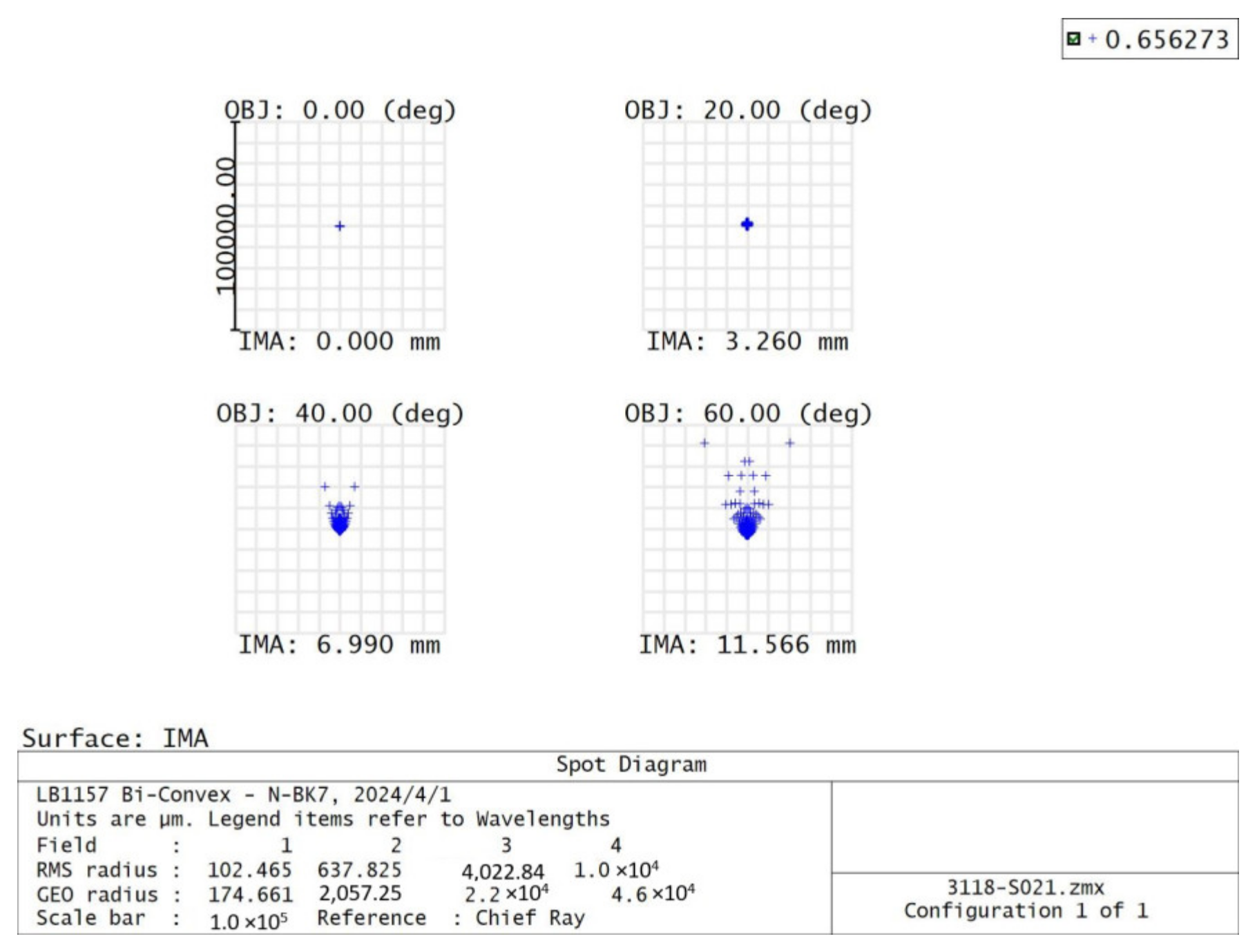
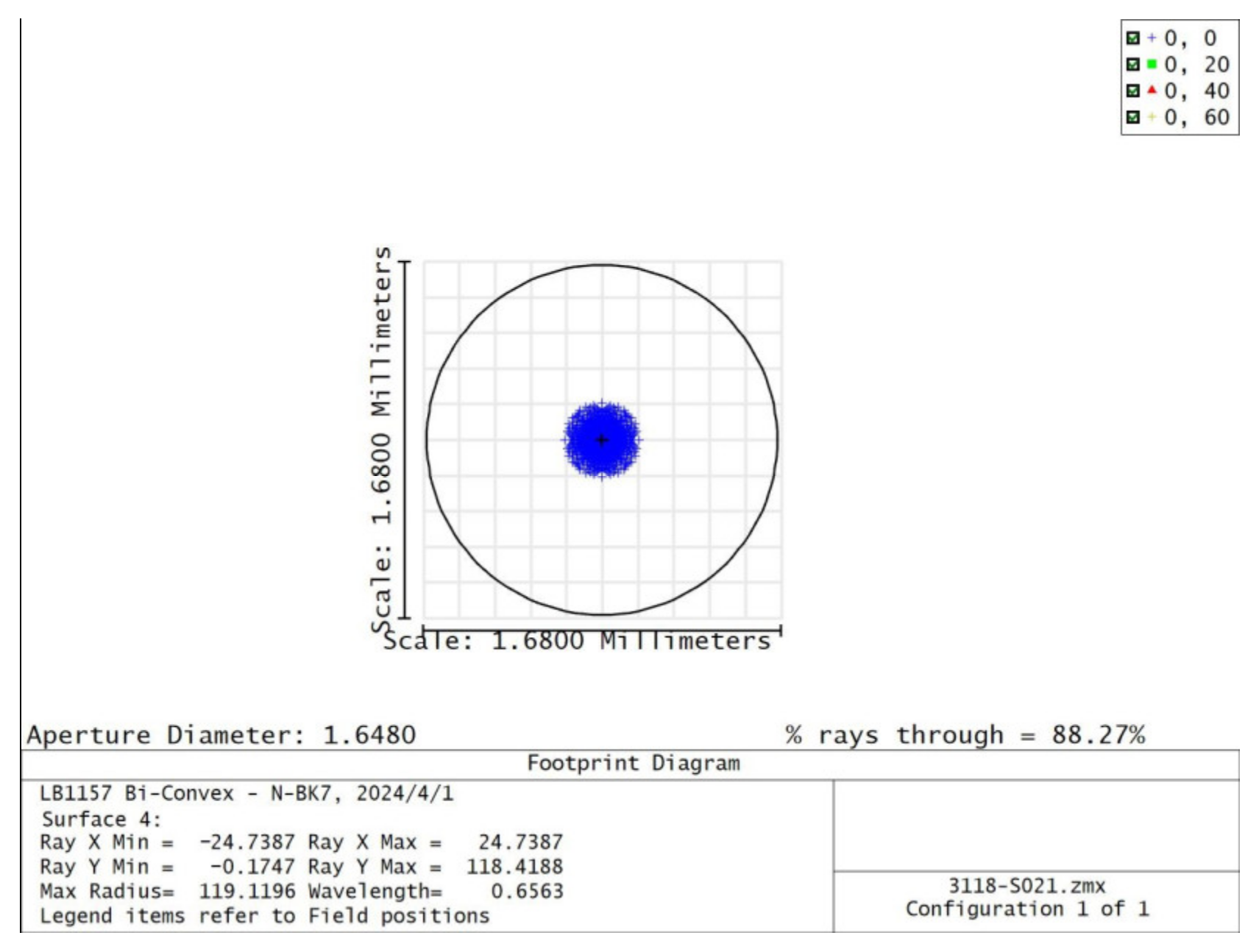
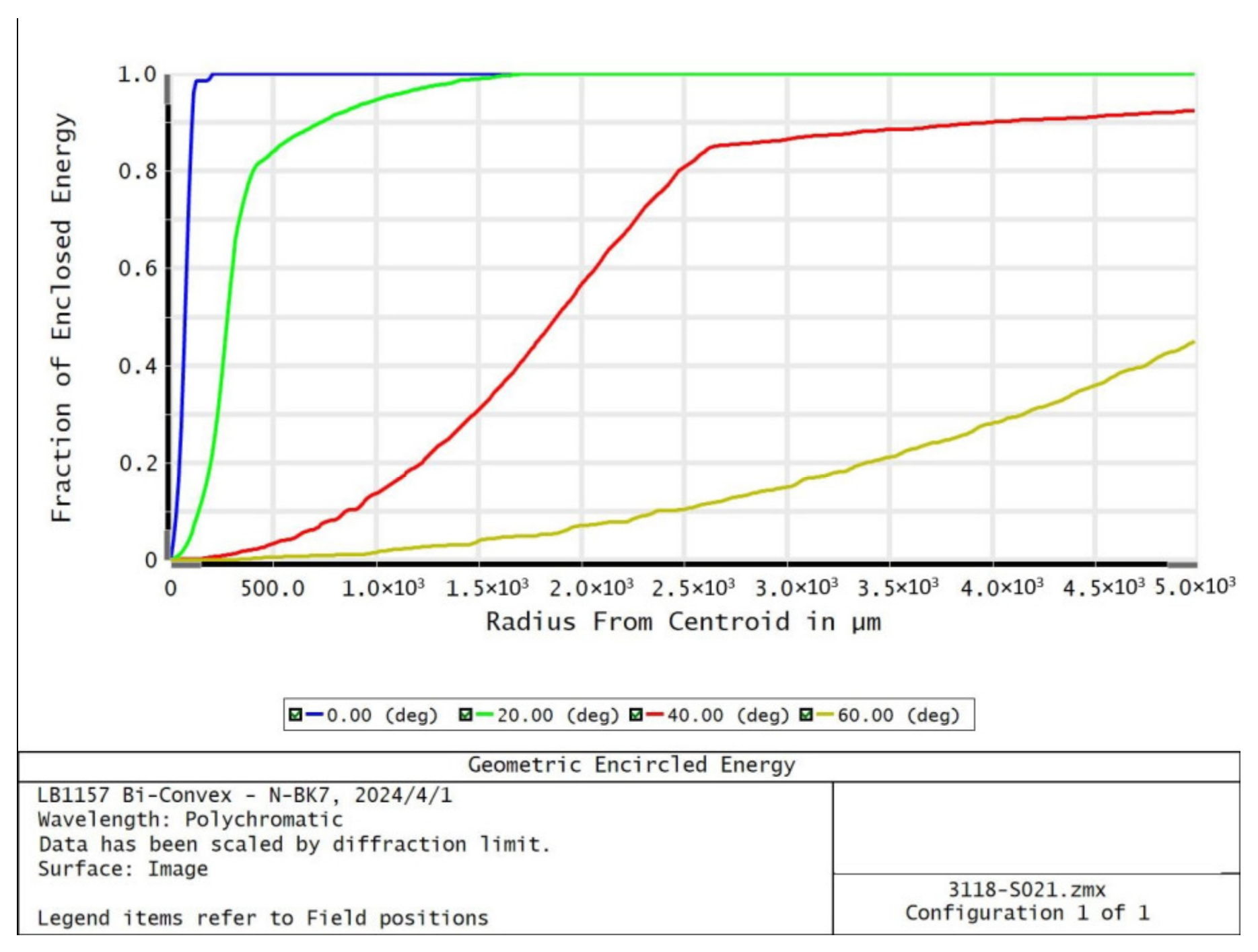
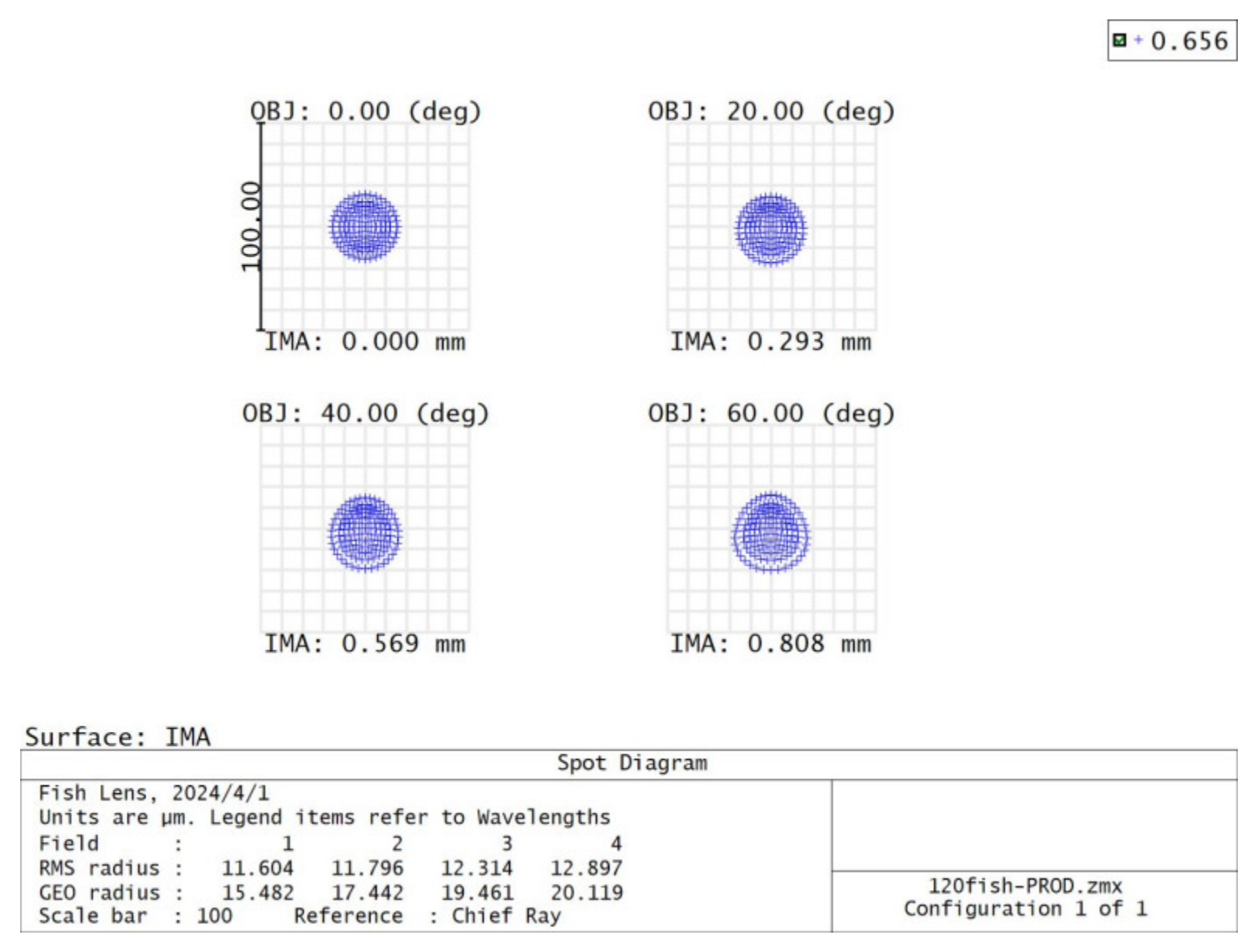
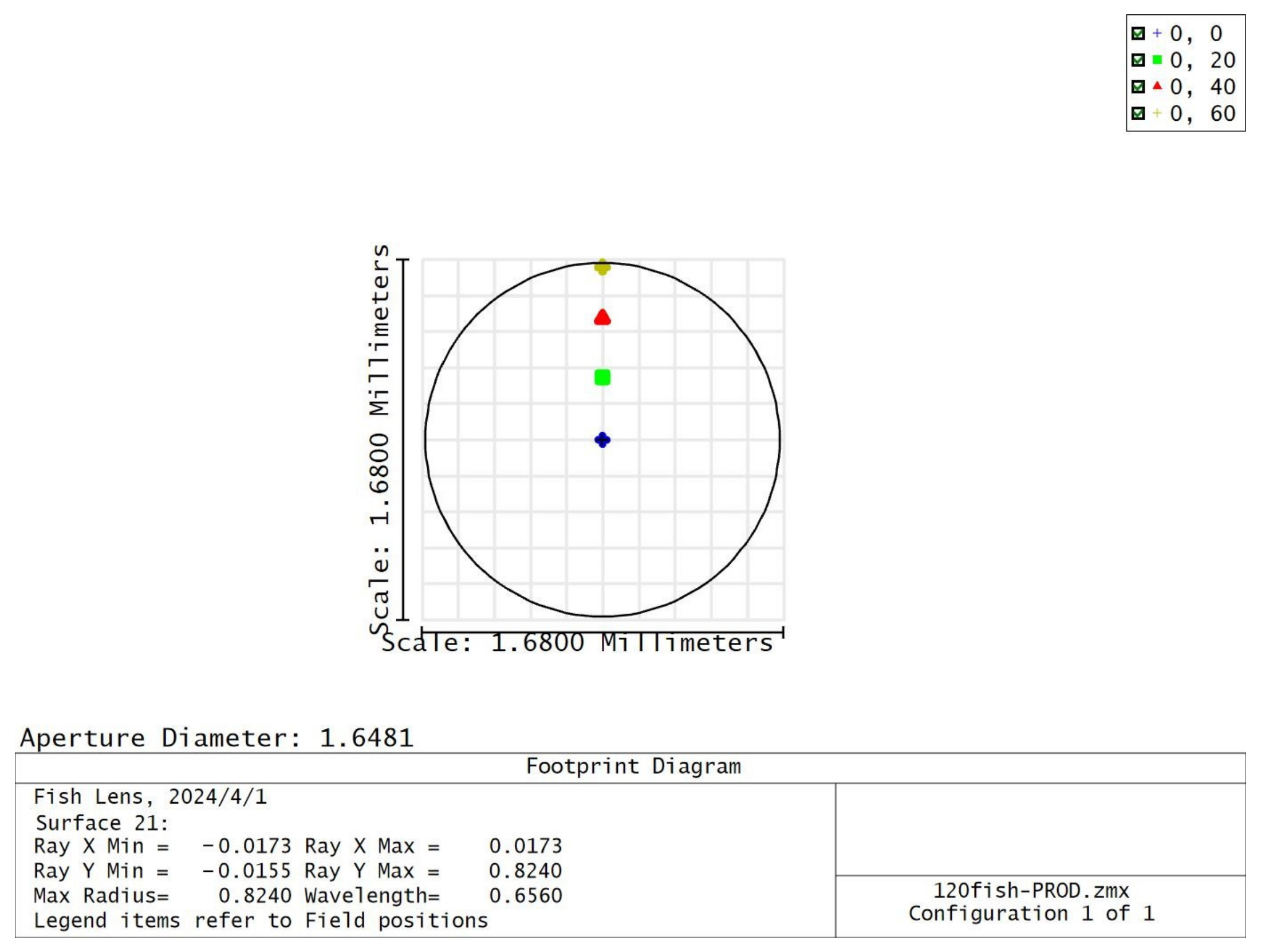
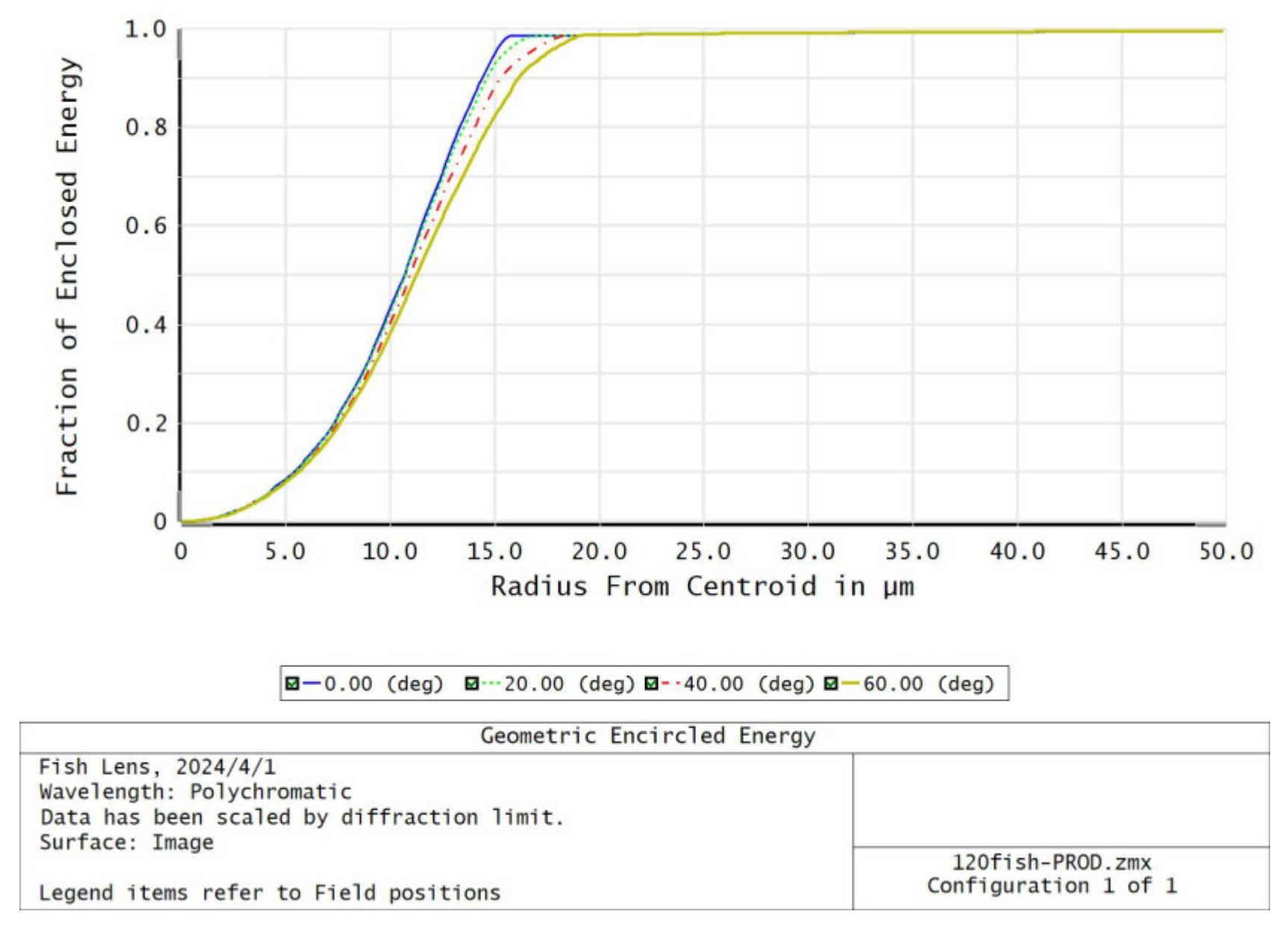
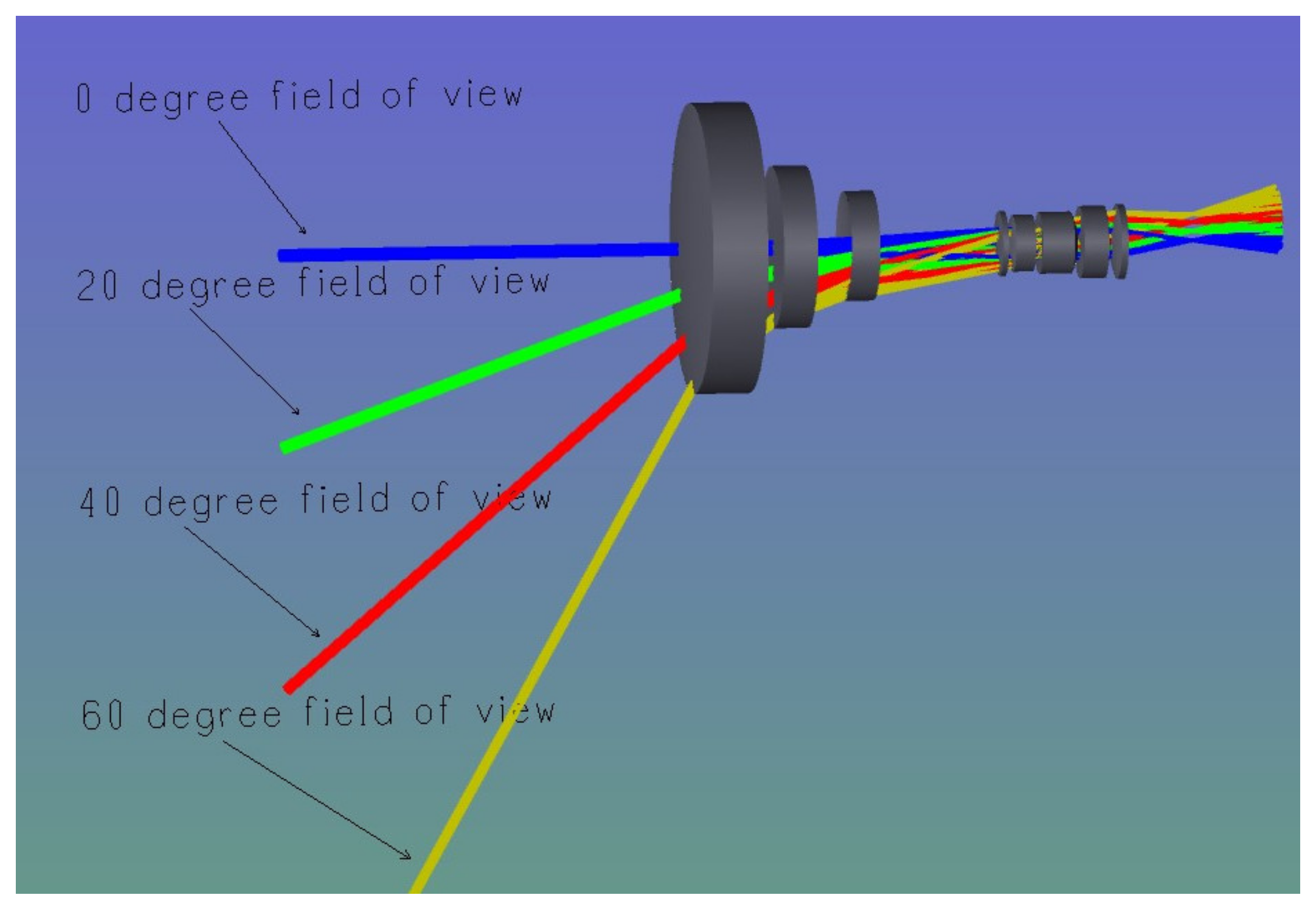
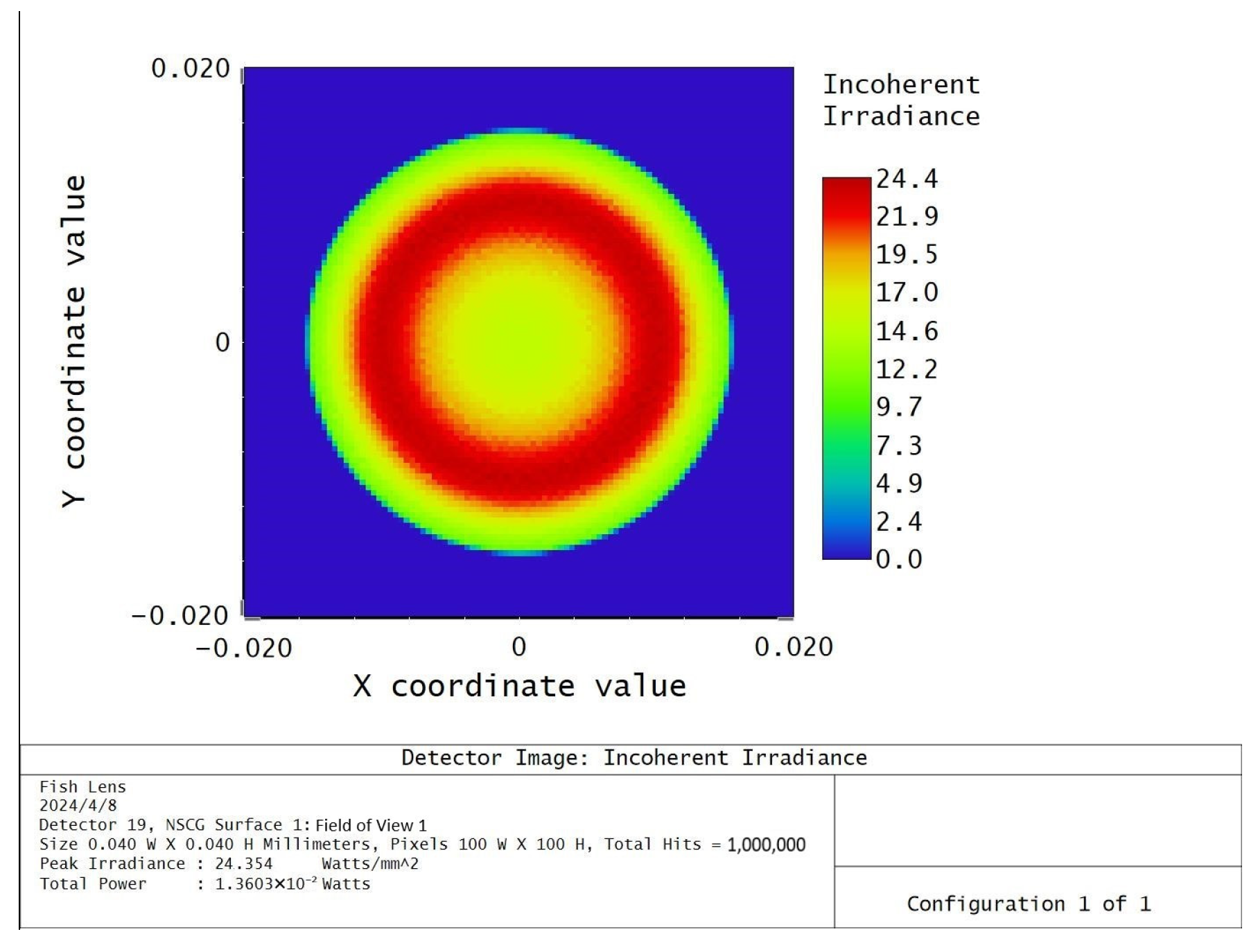
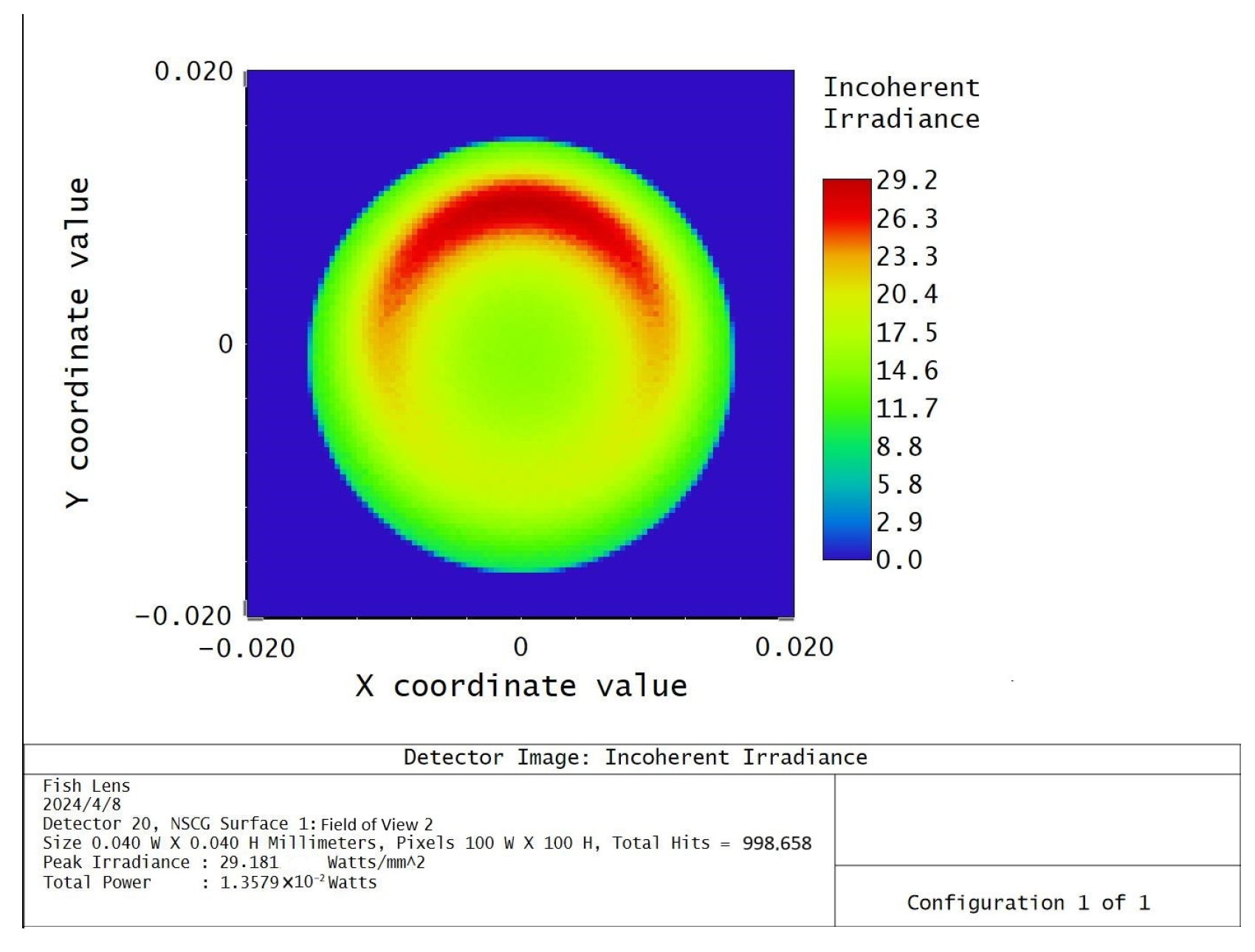
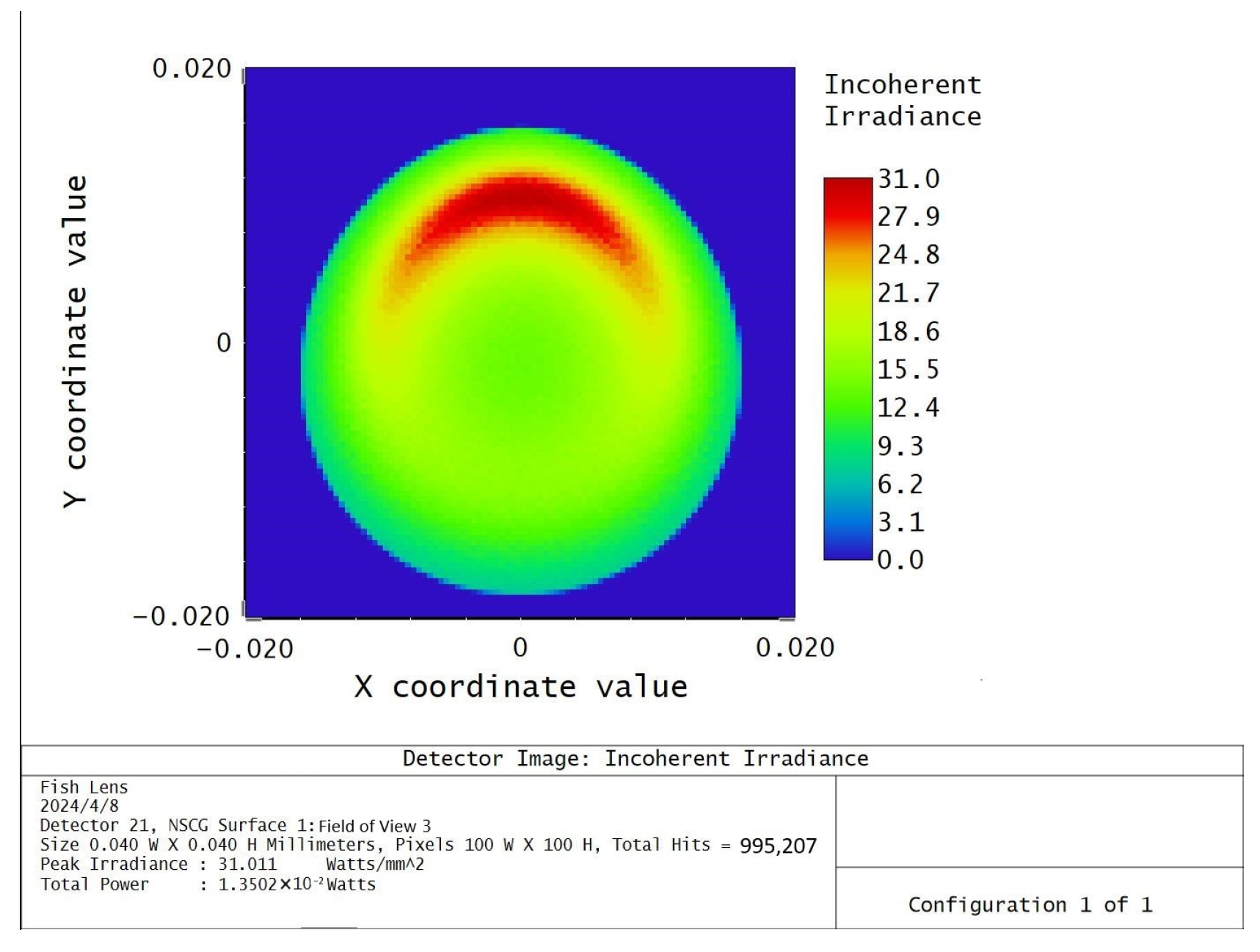
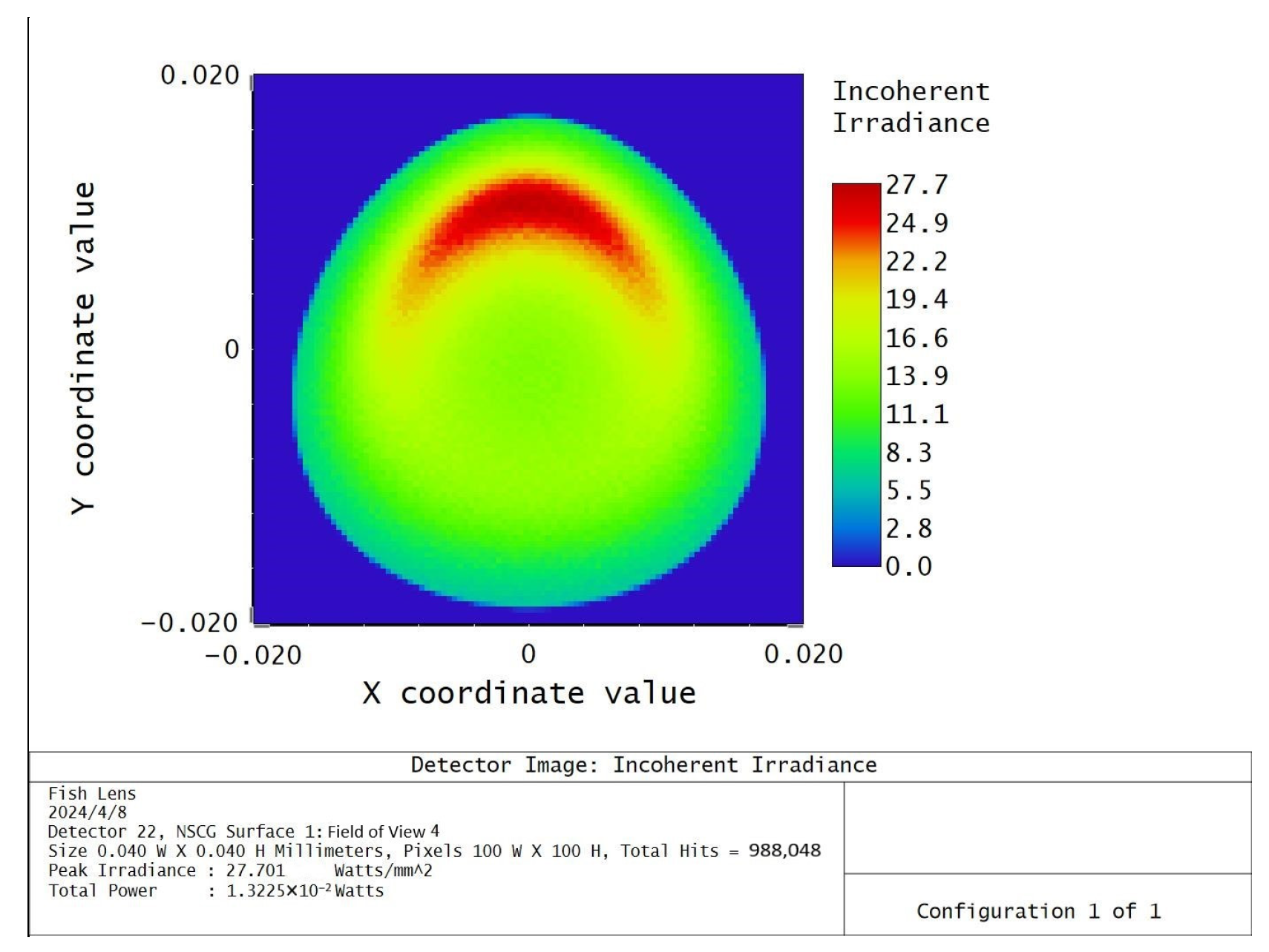
2.3. Fisheye Lens Simulation Analysis
3. Experimental and Data Analysis
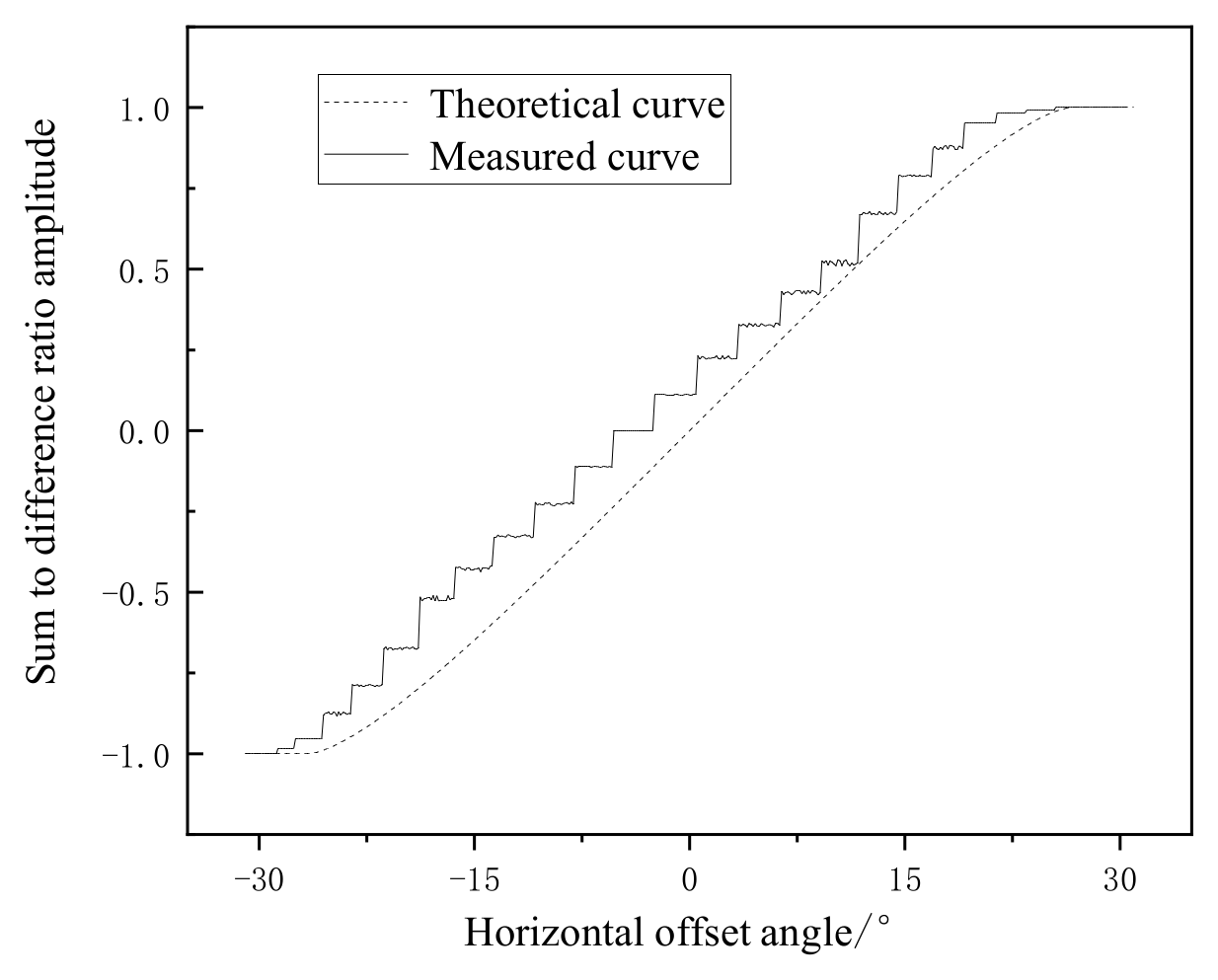
3.1. Fisheye Lens Field of View Testing
3.2. Experimental Testing
3.2.1. System Configuration
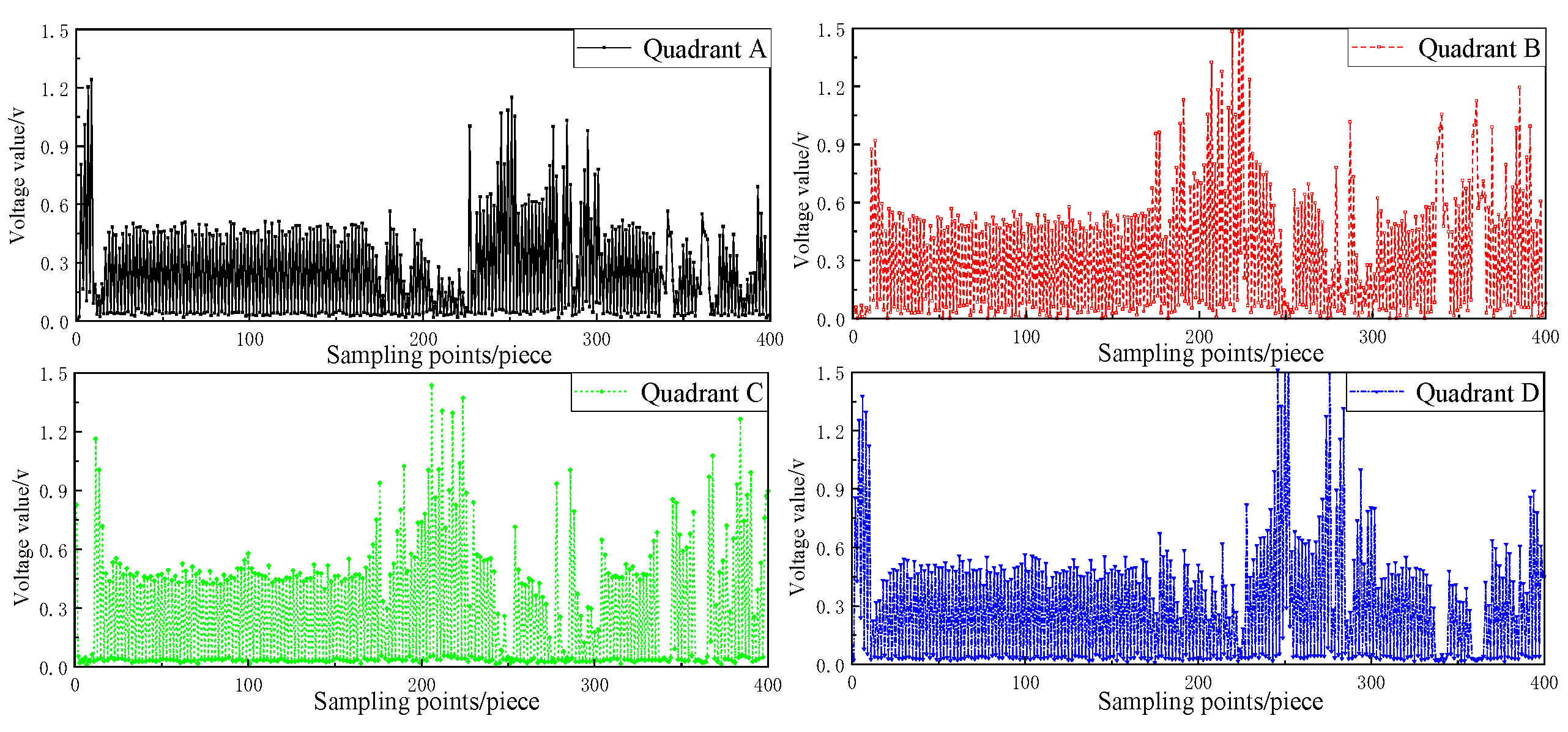
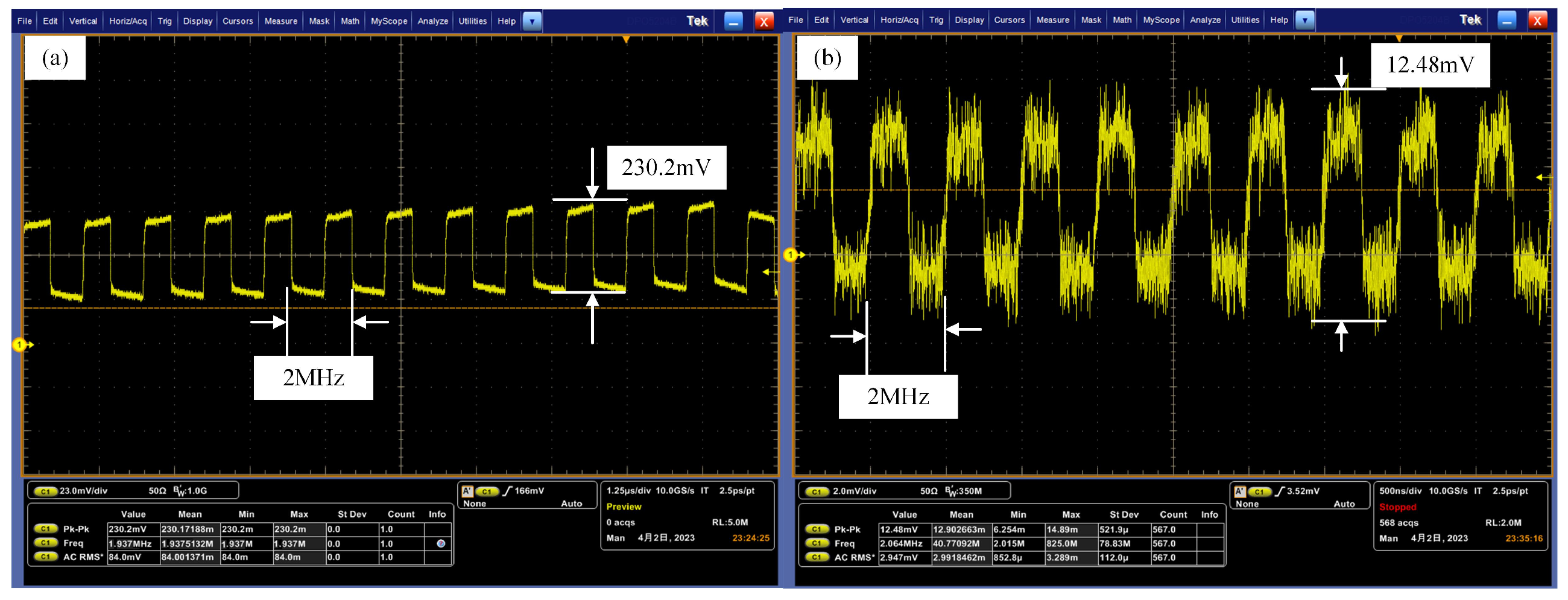
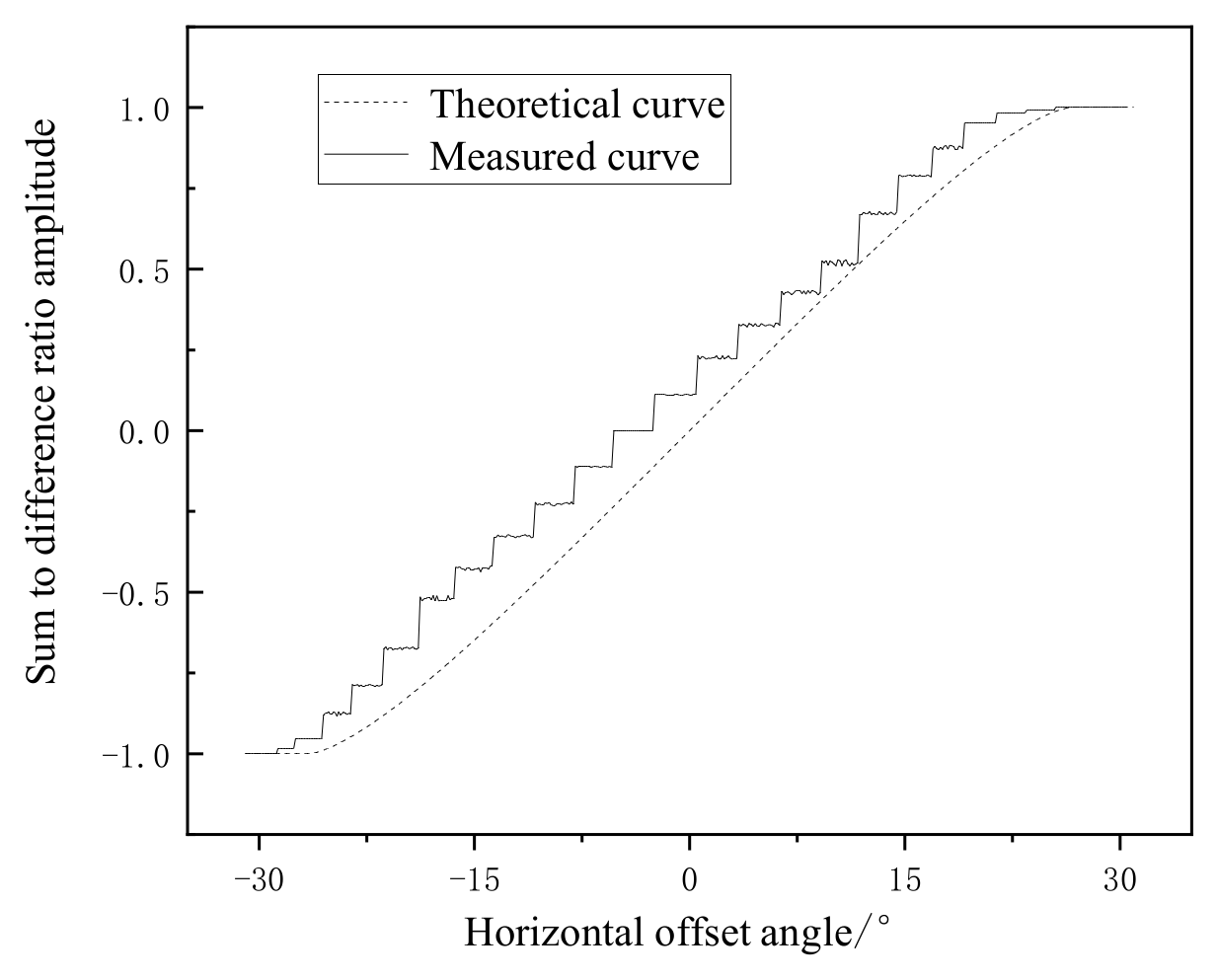
3.2.2. Data Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ren, J.Y.; Sun, H.Y.; Zhang, L.X.; Zhang, T.Q. Development status of space laser communication and new method of networking. Laser Infrared 2019, 49, 143–150. [Google Scholar] [CrossRef]
- Zeng, F.; Gao, S.J.; San, X.G.; Zhang, X. Development status and trend of airborne laser communication terminals. Chin. Opt. 2016, 9, 65–73. [Google Scholar] [CrossRef]
- Ding, J.P.; Yi, Z.L.; Wang, J.T.; Li, Y.P.; Zhang, Z.J.; Jie, P.; Guo, X.R.; Chen, X.F. Recent Advances of UAV Airborne Optical Wireless Communications. Laser Optoelectron. Prog. 2020, 57, 40–51. [Google Scholar] [CrossRef]
- Lv, C.L.; Tong, S.F.; Song, Y.S. Optical-path Optimization Design of Compound Axis and APT Study of Airborne Laser Communication. Acta Photonica Sin. 2012, 41, 649–653. [Google Scholar]
- Zhao, M.; Xie, H.B.; Chen, M.; Yang, L. Design of tracking communication integrated receiving optical system. J. Appl. Opt. 2019, 40, 973–979. [Google Scholar] [CrossRef]
- Zhang, S.Y. Design and Experimental Verification of an Airborne Miniaturized Laser Communication Terminal. Telecommun. Eng. 2019, 59, 678–683. [Google Scholar] [CrossRef]
- Shen, Y.; Feng, Y.; Xu, L.; Sun, H.; An, J.X.; Ma, J.J. Unmanned aerial vehicle airborne laser transmission technology for fast lift air base station. Opt. Commun. Technol. 2019, 43, 32–35. [Google Scholar] [CrossRef]
- An, J.X.; He, X.L.; Yang, Q.Y.; Xu, L.; Liu, X. Research on the application of the air to ground free space optical communication by small UAV. Opt. Commun. Technol. 2017, 41, 10–13. [Google Scholar] [CrossRef]
- Xu, L.; Shen, Y.; An, J.X.; Li, K.; Luo, L. Development of a UAV airborne laser communication equipment. Opt. Commun. Technol. 2018, 42, 60–62. [Google Scholar] [CrossRef]
- Ke, X.Z.; Liang, H.L. Airborne Laser Communication System with Automated Tracking. Int. J. Opt. 2021, 2021, 9920368. [Google Scholar] [CrossRef]
- Tu, B.; Liu, L.; Liu, Y.; Jin, Y.; Tang, J. Acquisition probability analysis of ultra-wide FOV acquisition scheme in optical links under impact of atmospheric turbulence. Appl. Opt. 2013, 52, 3147–3155. [Google Scholar] [CrossRef] [PubMed]
- Ma, X. Spatial acquisition scheme with ultrawide FOV for atmospheric optical links: Based on a fish-eye lens and a sinusoidal amplitude grating. Appl. Opt. 2015, 54, 4135–4146. [Google Scholar] [CrossRef]
- Chen, T.; Liu, L.; Tu, B.; Zheng, Z.; Hu, W. High-Spatial-Diversity Imaging Receiver Using Fisheye Lens for Indoor MIMO VLCs. IEEE Photonics Technol. Lett. 2014, 26, 2260–2263. [Google Scholar] [CrossRef]
- Hua, Y.; Xiong, J.; Gao, Y.; Zhang, H.; Yang, X.; Zhang, Y.; Cai, C.; Wang, L.; Li, Y.; Xu, J. Fisheye lens-based UWOC system with an FOV of ±90°. Opt. Express 2023, 31, 26888–26897. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.J.; Ke, X.Z.; Wu, J.L.; Liu, X.G. Fast Alignment of Wireless Optical Communication Using Two-Dimensional Mirror. Chin. J. Lasers 2022, 49, 101–114. [Google Scholar] [CrossRef]
- Xue, P.Y.; Wu, Y.; Feng, Q.; Li, C. Design of the large field optical system for four-quadrant detecting. Chin. Opt. 2014, 7, 462–468. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Transmitting power | 35 (mW) |
| Wavelength | 650 (nm) |
| Transfer rate | 4 (Gbit/s) |
| APD responsivity | 0.35 (A/W) |
| Two-dimensional reflector | ±90° @Azimuth 360° @Pitch angle |
| Experimental Equipment | Main Parameter |
|---|---|
| Laser | Wavelength: 650 (nm) Power: 35 (mW) |
| Signal modulator | Modulation mode: OOK modulation Modulation bandwidth: 0~20 (Mhz) |
| Transmitting antenna | Type: Maksutov–Cassegrain telescope Aperture: 105 (mm) |
| Two-dimensional reflector | Mirror diameter: 60 (mm) Modulation range: ±90° @Azimuth 360° @Pitch angle |
| QD | Photosensitive surface diameter: 5.05 (mm) Response time: 13 (ns) |
| Photodetector | Type: InGaAs Response frequency: 30 (kHz)~1.5 (GHz) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; Ke, X. The Application of a Fisheye Lens in the Automatic Alignment of Wireless Optical Communication. Photonics 2024, 11, 344. https://doi.org/10.3390/photonics11040344
Xu H, Ke X. The Application of a Fisheye Lens in the Automatic Alignment of Wireless Optical Communication. Photonics. 2024; 11(4):344. https://doi.org/10.3390/photonics11040344
Chicago/Turabian StyleXu, Haoyu, and Xizheng Ke. 2024. "The Application of a Fisheye Lens in the Automatic Alignment of Wireless Optical Communication" Photonics 11, no. 4: 344. https://doi.org/10.3390/photonics11040344
APA StyleXu, H., & Ke, X. (2024). The Application of a Fisheye Lens in the Automatic Alignment of Wireless Optical Communication. Photonics, 11(4), 344. https://doi.org/10.3390/photonics11040344