Abstract
Under the same conditions, we propose the extended comparison between two derivative free schemes of order six for addressing equations. The existing convergence technique used the standard Taylor series approach, which requires derivatives up to order seven. In contrast to previous researchers, our convergence theorems only demand the first derivative. In addition, formulas for determining the region of uniqueness for the solution, convergence radii, and error estimations are suggested. As a consequence, we broaden the utility of these productive schemes. Moreover, we present a comparison of attraction basins for these schemes to obtain roots of complex polynomial equations. The confirmation of our convergence findings on application problems brings this research to a close.
Keywords:
nonlinear models; divided difference; derivative free method; sixth order convergence; convergence ball MSC:
37N30; 47J25; 49M15; 65H10; 65J15
1. Introduction
Let and denote normed linear spaces which are complete. Suppose is non-null, open and convex. Nonlinear equations of the type [1,2,3,4]
where is derivable as per Fréchet, may be used to simulate a wide range of complex scientific and engineering issues. The closed version of the solution can be determined only in some special cases. The employment of iterative algorithms to conclude is common among scientists and researchers because of this. Newton’s method is a popular iterative process for dealing with nonlinear equations. Many novels and higher-order iterative strategies for dealing with nonlinear equations have been discovered and are currently being used in recent years [5,6,7,8]. However, the theorems on the convergence of these schemes in most of these publications are derived by applying high-order derivatives. Furthermore, no results are discussed regarding the error distances, radii of convergence, or the region in which the solution is the only one.
In research work of iterative procedures, it is crucial to determine the region where convergence is possible. Most of the time, the convergence zone is rather small. It is required to broaden the convergence domain without making any extra assumptions. Likewise, while investigating the convergence of iterative algorithms, exact error distances must be estimated. Taking these points into consideration, we develop convergence theorems for two methods (2) and (3) proposed in [9,10], respectively. Let
and is a first order divided difference [2,11], i.e., denoted the space of continuous linear operators mapping to , and for I denoting the identity operator on ,
The convergence order is four for the two-step methods (2) and (3) and the order is six for the complete three step methods (2) and (3). The development, comparison, and performance of the four and six-order methods were also given in [9,10]
Convergence works of these algorithms [9,10] are based on derivatives of L up to order seven and offer only a convergence rate. As a consequence, the productivity of these schemes is limited. To observe this, we define L on by
Due to the unboundedness of the results on the convergence of [9] and [10] do not stand true for this example. Furthermore, these articles do not produce any formula for approximating the error , the convergence region, or the uniqueness and accurate location of . The same approach applies to other methods with inverses such as [8,12,13,14,15,16,17,18,19]. This encourages us to develop the ball convergence theorems and hence compare the convergence domains of and by considering assumptions only on . Our research provides important formulas for the estimation of and convergence radii. This study also discusses an exact location and the uniqueness of . Furthermore, a visual process, called the attraction basin, is utilized to compare the convergence regions of these algorithms.
2. Local Analysis
The local analysis is presented in this section for the methods and , respectively. This analysis used real parameters and real functions. Let and , , .
Assume function:
- (i)
- has a minimal root for some continuous and non-decreasing function . Let .
- (ii)
- has a minimal root , with the function being non-decreasing and continuous and non-decreasing, and is given as
- (iii)
- has a minimal root , where is given asSet and
- (iv)
- has a minimal root , where is given asfor some function which is continuous and non-decreasing.
- (v)
- has a minimal root , where is given as
Let
Let . Notice that for each
and
We utilize the condition provided is a simple root of L and the functions “B” is as given above.
- ()
- andhold for each . Let .
- ()
- andhold for .
- ()
- , where parameter and is given later.
- ()
- There exist satisfying or .Let .
Next, conditions are needed to prove the local convergence analysis of method .
Theorem 1.
Assume conditions hold for . Then, we have , provided and the only root of L in the set is .
Proof.
Items
and
shall be proven, where the radius r is given in (2) and function are as previously defined. By hypothesis .
It follows by , and that
and
It also follows by (15) and the first substep of method that iterate is well defined, and
Hence, the iterate exists given . Moreover, we get
Then, it follows by (2), (8) (for ), (15), , , (17), (19) and (20),
proving (10) if and the iterates . The iterate is well defined by the third substep of method . Furthermore, as in (20) and (21)), we write
By using (2), (8) (for ), (15), (17), (19), (21) and (22),
proving (11) if and that the iterate . Simply exchange , , , , , by , , , , , in the above calculations, the induction for (9)–(11) is done. Then, from the inequality
we get and .
Let for some and . Then, by and , it follows that
which implies , since and . □
Next, the local analysis of method follows analogously. However, this time the “ functions are given as
and
and
where , are the minimal positive roots of , (assumed to exist). These functions are motivated by the estimations (under conditions with ):
so
and
so
That is we have proven the corresponding local convergence analysis for method .
Theorem 2.
Assume conditions hold for provided that . Then, the items of Theorem 2 hold for method with , , replacing r, , , respectively.
3. Attraction Basins Comparison
For evaluating the convergence zones of iterative algorithms the basin of attraction is a valuable geometrical tool. These basins illustrate all the initial estimations that imply convergence to a root of an equation when an iterative approach is used, allowing us to see visually which places are suitable starters and which are not. Using this excellent tool, we compare the convergence areas of and for a variety of complex polynomials. With the starting point ×, and used on polynomials with complex coefficients. The starter is in the basin of a root of a test polynomial if and then a typical color associated with is applied on . Black color is applied on if diverges. To end the iteration process, the conditions or the maximum of 100 iterations is used. The fractal figures are created in MATLAB 2019a.
The experiment begins with the polynomials and to design the basins of their roots. In Figure 1 and Figure 2, yellow and magenta colors are associated with the roots i and , of , respectively. Figure 3 and Figure 4 offer basins of roots and 0 of in magenta and green colors, respectively. Next, the polynomials and are picked. Figure 5 and Figure 6 give the attraction basins of roots , and of in cyan, yellow and magenta, respectively. In Figure 7 and Figure 8, the basins of the roots 0, , and i of are painted in cyan, yellow and magenta colors, respectively. Further, and are chosen to decorate the attraction basins of their roots. In Figure 9 and Figure 10, the basins of the roots , , and of are, respectively, indicated in green, blue, red and yellow zones. In Figure 11 and Figure 12, convergence to the roots , , and 0 of the polynomial is presented in yellow, blue, green and red, respectively. Furthermore, and are taken. In Figure 13 and Figure 14, magenta, green, yellow, blue and red colors are applied to the basins of roots , , , and , respectively, of . Figure 15 and Figure 16 display the basins of the roots , 0, , and of in blue, green, magenta, yellow, and red colors, respectively. Lastly, we select and . In Figure 17 and Figure 18, the basins of the roots , , , , and of are illustrated in yellow, blue, green, magenta, cyan and red, respectively. Figure 19 and Figure 20 give the basins of the roots , , 0, , and of in green, yellow, red, cyan, magenta and blue colors, respectively.
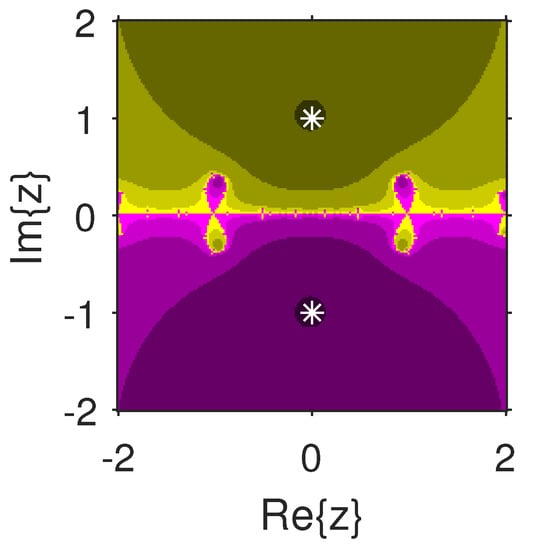
Figure 1.
.
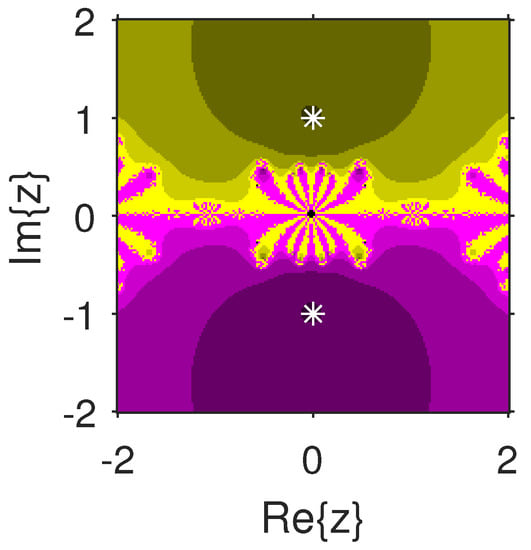
Figure 2.
.
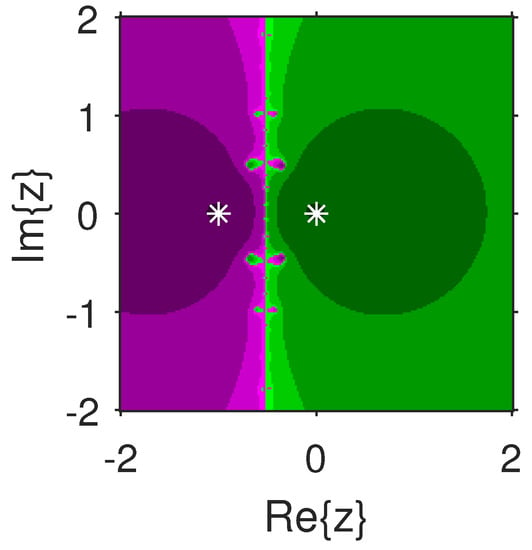
Figure 3.
.
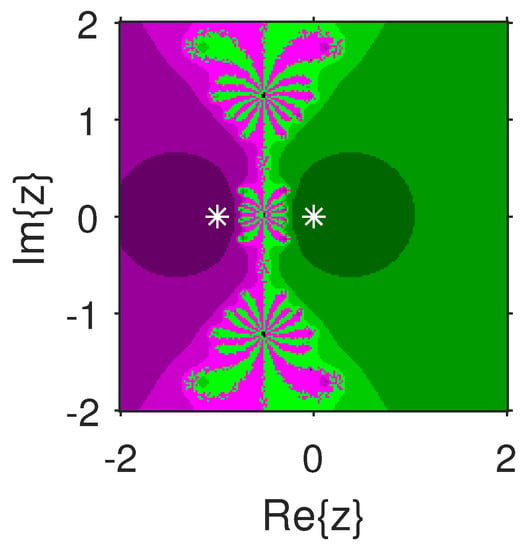
Figure 4.
.
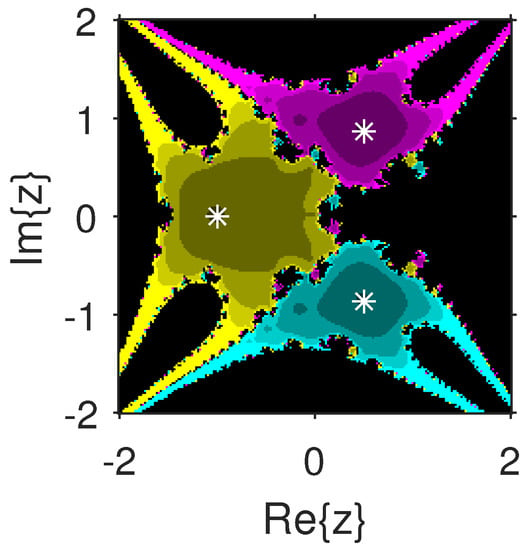
Figure 5.
.
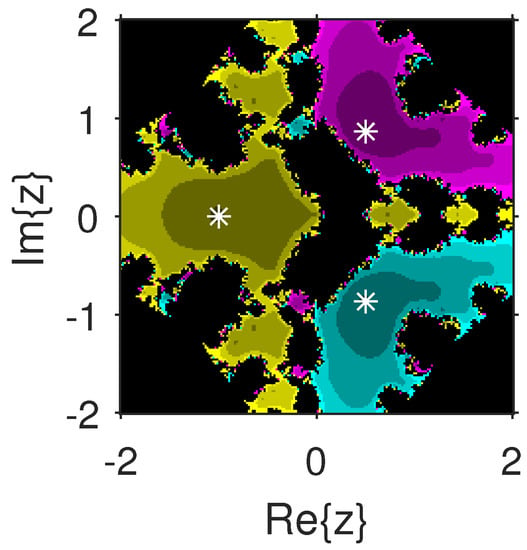
Figure 6.
.
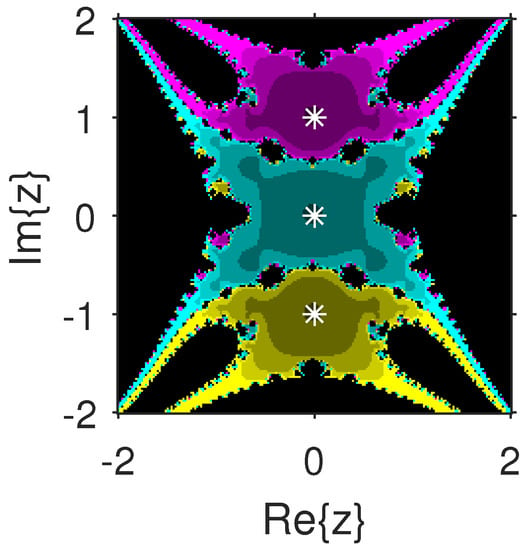
Figure 7.
.
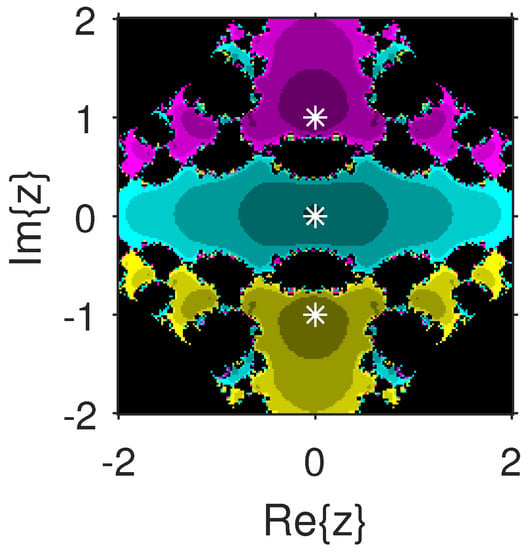
Figure 8.
.
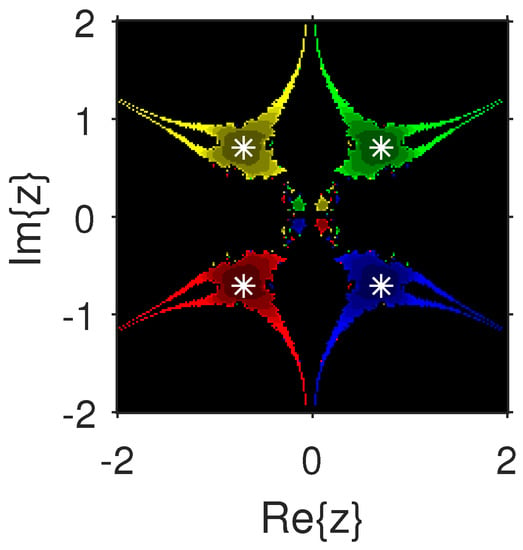
Figure 9.
.
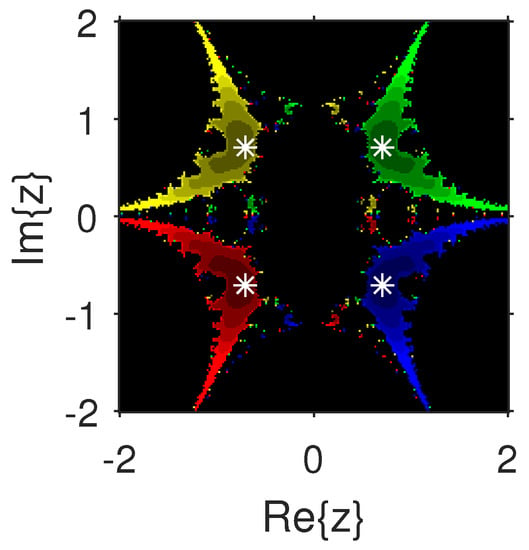
Figure 10.
.

Figure 11.
.
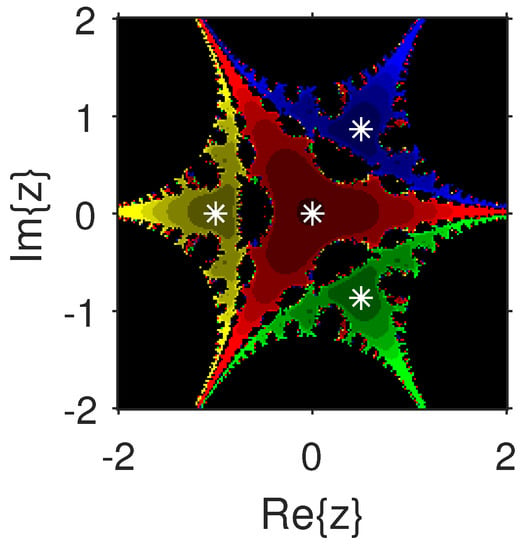
Figure 12.
.
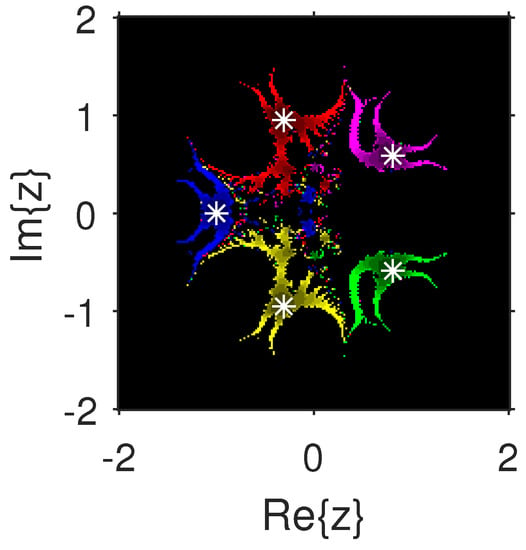
Figure 13.
.
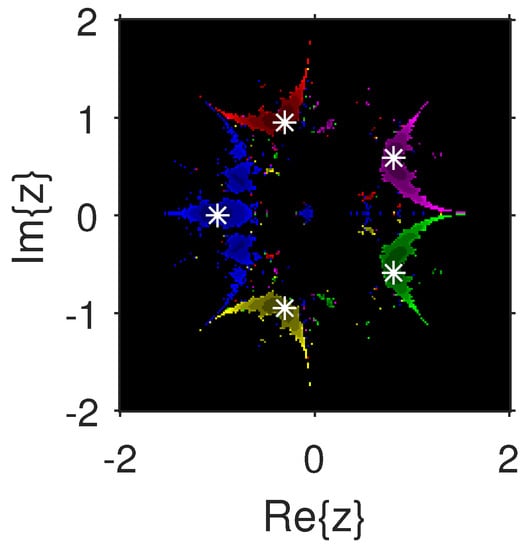
Figure 14.
.
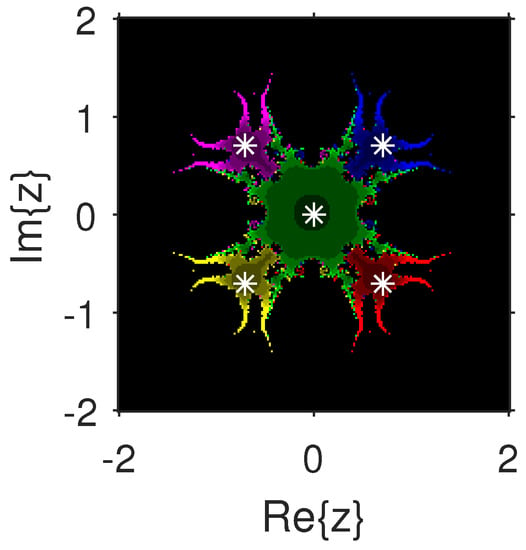
Figure 15.
.
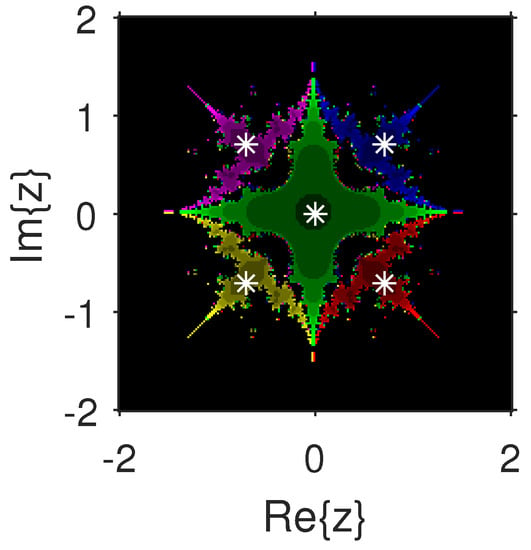
Figure 16.
.
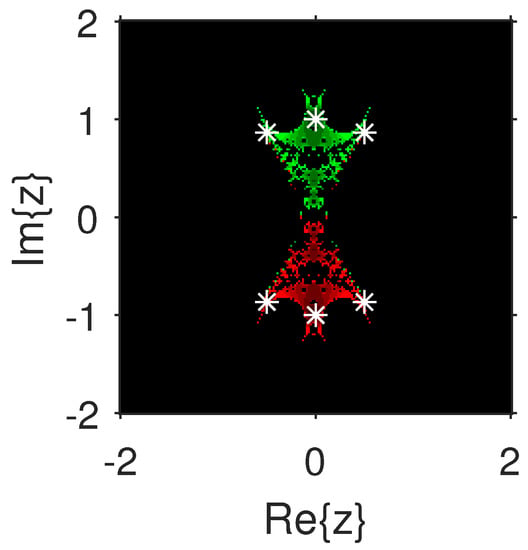
Figure 17.
.
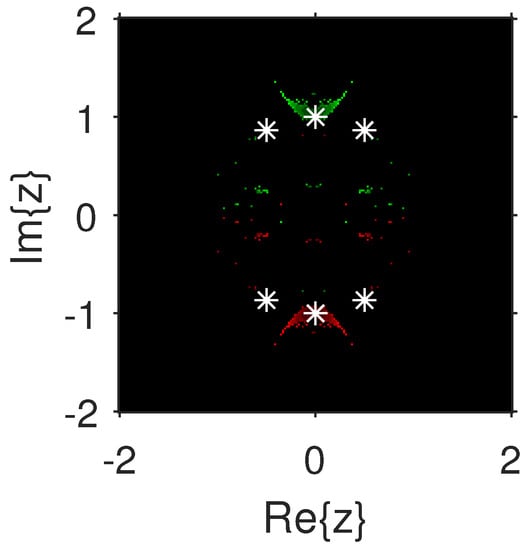
Figure 18.
.
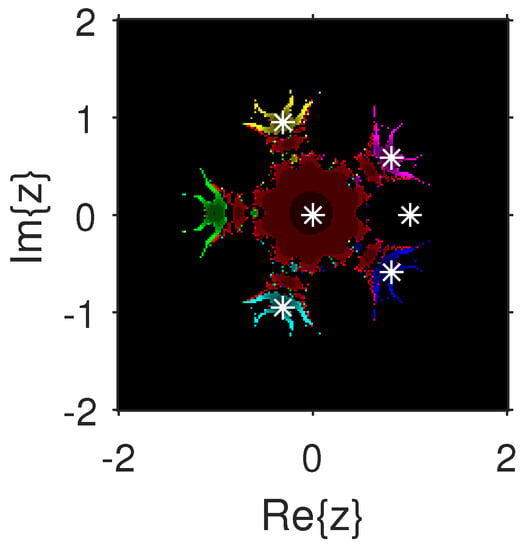
Figure 19.
.
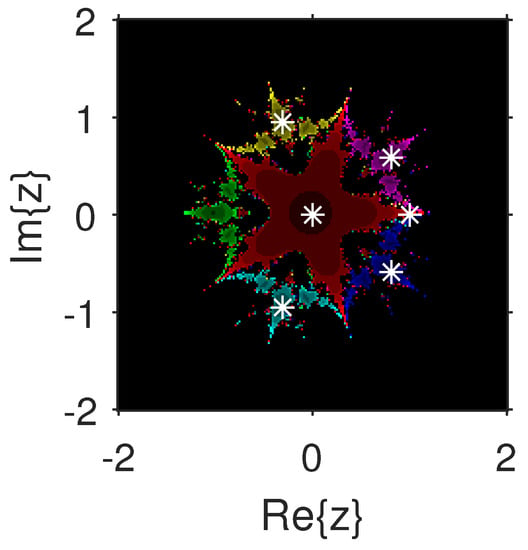
Figure 20.
.
We consider polynomials and of degree two. The results of the comparison between attraction basins for (2) and (3) are displayed in Figure 21 and Figure 22. In Figure 21, green and pink areas show the attraction basins corresponding to the roots and 1, respectively, of . The basins of the roots and of are shown in Figure 22 by using pink and green colors, respectively. Figure 23 and Figure 24 determine the attraction basins for (2) and (3) associated with the roots of and . The basins for (2) and (3) associated with the roots 1, and of are given in Figure 23 by means of green, pink and blue domains, respectively. In Figure 24, the basins of the roots 0, 1, and of are painted in yellow, magenta and cyan, respectively. Next, we use polynomials and of degree four to compare the attraction basins for (2) and (3). The basins for (2) and (3) corresponding to the roots , 3, and 1 of are illustrated in Figure 25 using yellow, pink, green and blue colors, respectively. Figure 26 gives the comparison of basins for these schemes associated with the roots 0, 1, and of , which are denoted in green, blue, yellow and red regions, respectively. Moreover, we select polynomials and of degree five to give and compare the attraction basins for (2) and (3). In Figure 27, green, cyan, red, pink and yellow regions illustrate the attraction basins of the roots , , , and 0, respectively, of . Figure 28 gives the basins of roots 0, 2, , and 1 of in yellow, magenta, red, green and cyan colors, respectively. Lastly, sixth degree complex polynomials and are considered. In Figure 29, green, pink, red, yellow, cyan and blue colors are used to give the basins related to the roots , , , , and of , respectively. In Figure 30, the attraction basins for (2) and (3) corresponding to the roots , , , 1, i and of are provided in blue, yellow, green, magenta, cyan and red colors, respectively.
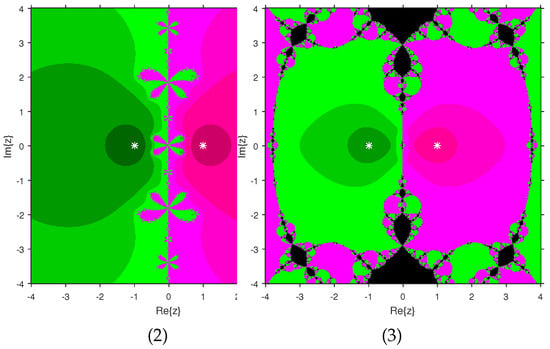
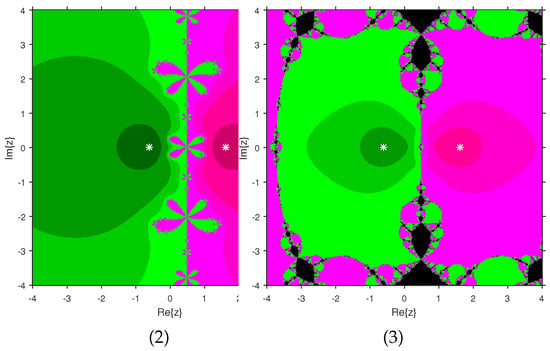


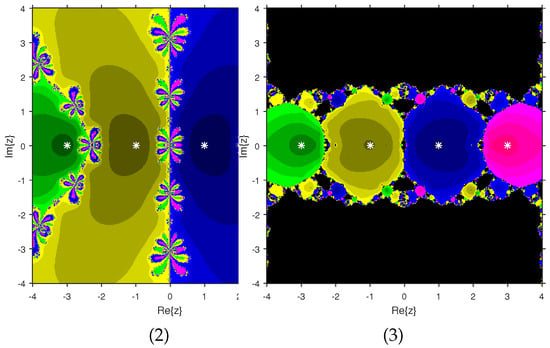
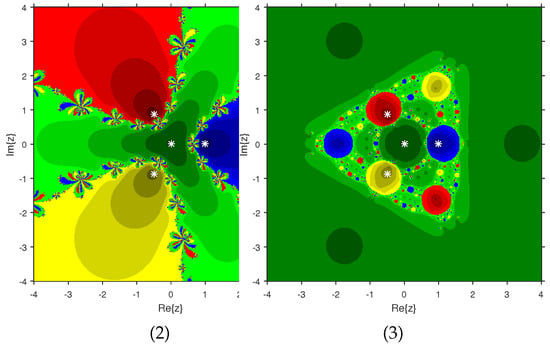

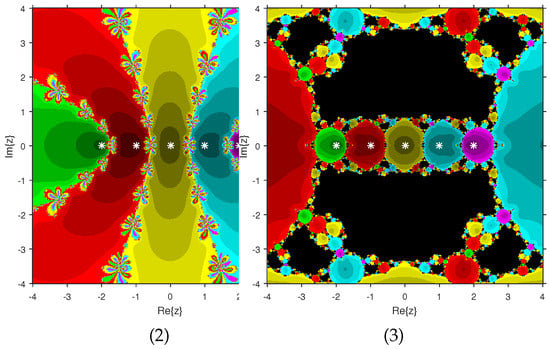

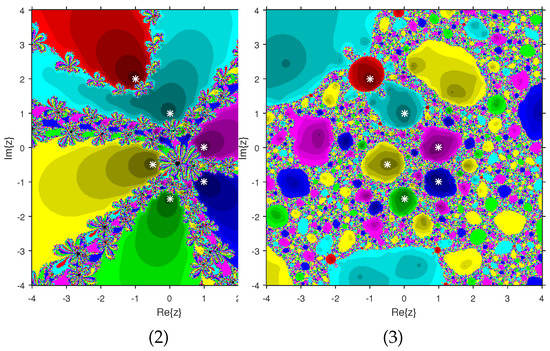
From Figure 21, Figure 22, Figure 23, Figure 24, Figure 25, Figure 26, Figure 27, Figure 28, Figure 29 and Figure 30, we deduce that (2) has the wider basins in comparison to (3). as it can be seen that the black zones that appear in Figure 21, Figure 25 and Figure 28 only appear in (3) method and not in (2). Furthermore, (2) is better than (3) in terms of less chaotic behavior as it can be seen that basins are bigger in (2) and there are fewer changes of basin than in (3) in each figure, which means that the fractal dimension is lower in (2) and consequently less chaotic. Hence, the overall conclusion of this comparison is that the numerical stability of (2) is higher than (3). This means that (2) is the preferable alternative for solving real problems. Moreover, related to the patterns that appear in the basin of attraction, it is clear that the (2) is similar to third-order methods such us Halley or Chebyshev and the immediate basin of attraction is big and black zones are avoided. On the other hand, in the (3) everything seems more independent with different structures, for example in Figure 29 where the roots are bounded by a small basin and then a really big one in red appears or Figure 21, Figure 25 and Figure 28 where zones with no convergence appear, especially in Figure 25 where almost the half of the plane is black. Finally, in Figure 24, Figure 26, Figure 27, and Figure 29 it seems that a compactification appears in the roots but one of the basins is much bigger than the rest, and this behavior is really interesting and can be considered in the future.
4. Examples
The convergence radii are determined for the iterative procedures and .
Example 1.

Let and . Consider L on A for as
Notice that
Also,
Using proposed theorems, we obtained r and . These radii are given in Table 1.
Table 1.
Comparison of the radii in Example 1.
Example 2.
Let us choose and . Consider the operator L on A defined as
where . We have . Furthermore,
The convergence radii r and are obtained using the suggested theorems and presented in Table 2.
Table 2.
Comparison of the radii in Example 2.
Example 3.
We solve the nonlinear systems
The initial point is chosen to be . Then, the two-step method (2) and (3) after three iterations as well as the three-step methods (2) and (3) after two iterations given the solution vector .
Example 4.
Let us consider the two-point differential equation
Moreover, let
Set , and .
The central difference for first, as well as the second order derivative discretion, give
By these substitutions, we obtain that nonlinear system.
5. Conclusions
A comparison is made between the convergence balls and dynamical behaviors of two derivative free equation solvers that are similar in their efficiency. The ball convergence of and solely require generalized Lipschitz continuity of . Then, the convergence zones of and are presented using the geometric tool attraction basins. Finally, our analytical conclusions are validated against real-world application challenges. The scheme is discovered to have bigger convergence balls than the solver . Future research will involve the extension of this technique to multipoint method [1,4].
Author Contributions
Conceptualization, I.K.A., S.R., C.I.A. and D.S.; methodology, I.K.A., S.R., C.I.A. and D.S.; software, I.K.A., S.R., C.I.A. and D.S.; validation, I.K.A., S.R., C.I.A. and D.S.; formal analysis, I.K.A., S.R., C.I.A. and D.S.; investigation, I.K.A., S.R., C.I.A. and D.S.; resources, I.K.A., S.R., C.I.A. and D.S.; data curation, I.K.A., S.R., C.I.A. and D.S.; writing—original draft preparation, I.K.A., S.R., C.I.A. and D.S.; writing—review and editing, I.K.A., S.R., C.I.A. and D.S.; visualization, I.K.A., S.R., C.I.A. and D.S.; supervision, I.K.A., S.R., C.I.A. and D.S.; project administration, I.K.A., S.R., C.I.A. and D.S.; funding acquisition, I.K.A., S.R., C.I.A. and D.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Argyros, I.K. Unified convergence criteria for iterative Banach space valued methods with applications. Mathematics 2021, 9, 1942. [Google Scholar] [CrossRef]
- Kantorovich, L.V.; Akilov, G.P. Functional Analysis, 2nd ed.; Translated from Russian by Howard L. Silcock; Pergamon Press: Oxford, UK, 1982. [Google Scholar]
- Ortega, J.M.; Rheinholdt, W.C. Iterative Solution of Nonlinear Equations in Several Variables; Academic Press: New York, NY, USA, 1970. [Google Scholar]
- Petkovič, M.S.; Neta, B.; Petkovič, L.; Dzunič, D. Multipoint Methods for Solving Nonlinear Equations; Elsevier: New York, NY, USA, 2013. [Google Scholar]
- Behl, R.; Bhalla, S.; Magreñán, Á.A.; Moysi, A. An optimal derivative free family of Chebyshev-Halley’s method for multiple zeros. Mathematics 2021, 9, 546. [Google Scholar] [CrossRef]
- Cordero, A.; Hueso, J.L.; Martínez, E.; Torregrosa, J.R. A modified Newton–Jarratts composition. Numer. Algorithms 2010, 55, 87–99. [Google Scholar] [CrossRef]
- Ezquerro, J.A.; Hernandez, M.A.; Romero, N.; Velasco, A.I. On Steffensen’s method on Banach spaces. J. Comput. Appl. Math. 2013, 249, 9–23. [Google Scholar] [CrossRef]
- Hernandez, M.A.; Rubio, M.J. A uniparametric family of iterative processes for solving nondifferentiable equations. J. Math. Anal. Appl. 2002, 275, 821–834. [Google Scholar] [CrossRef]
- Grau-Sánchez, M.; Noguera, M.; Amat, S.S. On the approximation of derivatives using divided difference operators preserving the local convergence order of iterative methods. J. Comput. Appl. Math. 2013, 237, 363–372. [Google Scholar] [CrossRef]
- Sharma, J.R.; Arora, H. An efficient derivative free iterative method for solving systems of nonlinear equations. Appl. Anal. Discr. Math. 2013, 7, 390–403. [Google Scholar] [CrossRef]
- Argyros, I.K. The Theory and Applications of Iteration Methods, 2nd ed.; Engineering Series; CRC Press: Boca Raton, FL, USA, 2022. [Google Scholar]
- Nueso, J.L.; Martinez, E.; Teruel, C. Convergence, efficiency and dynamics of new fourth and sixth order family of iterative methods for nonlinear systems. J. Comput. Appl. Math. 2015, 275, 412–420. [Google Scholar]
- Liu, Z.; Zheng, Q.; Zhao, P. A variant of Steffensen’s method of fourth-order convergence and its applications. Appl. Math. Comput. 2010, 216, 1978–1983. [Google Scholar] [CrossRef]
- Magreñán, Á.A.; Argyros, I.K.; Rainer, J.J.; Sicilia, J.A. Ball convergence of a sixth-order Newton-like method based on means under weak conditions. J. Math. Chem. 2018, 56, 2117–2131. [Google Scholar] [CrossRef]
- Magreñán, Á.A.; Gutiérrez, J.M. Real dynamics for damped Newton’s method applied to cubic polynomials. J. Comput. Appl. Math. 2015, 275, 527–538. [Google Scholar] [CrossRef]
- Sharma, D.; Parhi, S.K. On the local convergence of higher order methods in Banach spaces. Fixed Point Theory 2021, 22, 855–870. [Google Scholar] [CrossRef]
- Sharma, J.R.; Arora, H. Efficient derivative-free numerical methods for solving systems of nonlinear equations. Comp. Appl. Math. 2016, 35, 269–284. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, T. A family of steffensen type methods with seventh-order convergence. Numer. Algorithms 2013, 62, 429–444. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, T.; Qian, W.; Teng, M. Seventh-order derivative-free iterative method for solving nonlinear systems. Numer. Algorithms 2015, 70, 545–558. [Google Scholar] [CrossRef]






























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).