1. Introduction
In recent years, with the growing popularity of artificial intelligence and autonomous driving technologies, depth image processing algorithms have attracted increasing attention. A depth image is an image that contains depth information in each pixel, which can be used in three-dimensional (3D) reconstruction, object detection, face recognition, and in other fields. Depth image processing involves several problems, such as low contrast, high noise, and blurring problems. To address the problem of insufficient textural information in a depth image, mainstream processing methods focus on enhancing the edge of a depth image. However, only a few methods can effectively enhance the textural information of depth images without introducing fuzzy information. Consequently, depth image enhancement is a research hotspot at present, especially as enhancing the texture of a depth image can enable the obtainment of additional textural information from an image.
Various depth image processing algorithms have been developed. Masahiro devised a method to reduce the noise and number of voids in a depth image pixel by pixel and thereby improve the resolution [
1]. Specifically, by reducing the depth image random noise, the coordinates of the correct object surface are obtained; missing values are thus identified and then inserted between the existing pixels. Subsequently, new pixels are inserted between them to enhance the depth image. Zhang et al. developed an image enhancement algorithm based on an adaptive median filter and fractional-order differential [
2]. Wang et al. devised an image-denoising method based on fractional quaternion wavelet analysis [
3]. Zhou et al. used the fractal dimension method to enhance a depth image [
4]. Moreover, Zhou et al. established an edge-guided method for the super-resolution of depth images to obtain high-quality edge information. The edge-guided method can maintain edge sharpness, thereby avoiding blurry and jagged edges during depth image processing [
5]. Researchers have also used a variety of image processing techniques, such as histogram matching, edge-preserving filtering, and local contrast enhancement, to improve the quality and clarity of depth images [
6,
7,
8].
The above-described studies have provided strong support and useful references for depth image processing. However, the existing algorithms have several limitations, such as high complexity, low processing efficiency, and an inability to adapt to different scenarios. Thus, there is a need for efficient, stable, and reliable algorithms capable of depth image enhancement. Fractional differentiation is an emerging differential method that has wider applicability and stronger expressive power than existing methods. Moreover, fractional differentiation has been widely applied in the field of image processing with promising results. Fractional calculus is a mathematical tool that extends traditional integer-order calculus to non-integer orders and can be used to analyse complex systems with long memory and non-local dependencies. By incorporating fractional calculus into image processing techniques, researchers have improved these techniques’ image enhancement, restoration, and segmentation performances.
For example, Gupta et al. devised an adaptive image-denoising algorithm based on generalised fractional integration and fractional differentiation [
9]. They combined this algorithm with an innovative noise-detection method to detect salt-and-pepper noise in images. Moreover, they used an adaptive mask based on generalised fractional integration to update noise-free pixels to enhance the details of images. This framework served as a flexible tool for image enhancement and image denoising. Zhang et al. designed an image fusion method based on fractional difference, which enables better visual perception and more objective evaluation and retains more image details than traditional methods [
10]. Harjule et al. compared the traditional method with a fractional-order-based method for texture enhancement in medical images. To minimise the mean square error, the fractional-order operator for all images was optimised using the grey wolf optimiser. The results indicated that score-based operators with a differential order outperformed traditional integer order operators in the textural enhancement of medical images [
11]. Zhang constructed a new image-enhancement algorithm based on a rough set and a fractional-order differentiator. An image enhanced by this algorithm has a clear edge and rich textural details, and it can retain information from the smooth areas in an image [
12,
13].
Despite these promising results, several limitations remain to be addressed. First, most existing methods consider only the local features of images and ignore the non-local dependencies between different regions. Second, these methods may not be effective for images containing complex textures or structures. Finally, only a few researchers have focused on depth image enhancement processing and the application of fractional differentials in depth image processing. Therefore, the introduction of fractional calculus in depth image applications must be further explored.
This study aims to apply a fractional differential for depth image enhancement. This application involves several challenges, such as avoiding the introduction of fuzzy information and inconsistency with an actual scene. To address these problems, an improved algorithm, named the fractional differential-inverse-distance-weighted depth image enhancement method, is developed. The results of experiments show that the algorithm can effectively integrate local and non-local information into the enhancement process and effectively enhance depth images with complex textures and structures.
The remainder of this paper is organised as follows.
Section 2 describes the application of a fractional differential in image enhancement and the result, and discusses the problems in a depth image subjected to fractional differential enhancement.
Section 3 describes the inverse distance weighting technique and the development of the fractional differential-inverse-distance-weighting depth image enhancement method. The method is used to enhance depth images of different orders, and the fractional differential order is optimised. The results indicate that the algorithm is effective.
Section 4 presents the experimental results. The algorithm is applied to the depth image of a dataset, and the effect of the fractional differential small order and number of iterations on the algorithm’s performance is verified. The results show that the algorithm is universal, can effectively solve the interference of edges and voids in depth images, and can enhance textural details.
Section 5 presents the concluding remarks and recommendations for future research.
2. Fractional-Differential-Based Depth Image Enhancement
As an important branch of digital image processing, image enhancement has broad application aspects. The visual effect of image shooting may not be satisfactory owing to environmental conditions, and thus, image enhancement methods must be used (i.e., certain features of the target object in an image must be improved). Acquiring the typical characteristic parameters of a target in an image enables the effective recognition and detection of the target in the image [
14,
15]. The objective of image enhancement processing is to strengthen the valuable areas in an image and weaken or remove the non-essential information in the image. By enhancing the useful information, the image obtained in an actual scene can be transformed into an image that can be analysed and processed by humans or other systems. The features of an image (that is, the main information contained in the image) are typically present in the edge and textural details. Enhancing textural feature information can provide a valuable basis for further processing, such as image segmentation, recognition, or super-resolution. Fractional differentiation can help to improve the high-frequency and instantaneous-frequency (IF) parts of a signal, thereby nonlinearly strengthening the IF component while preserving the low-frequency and direct current parts. That is, fractional differentiation can enhance the edge and contour information and weak textural areas of an image. Thus, fractional differentiation is a valuable tool in image processing [
16,
17,
18,
19,
20].
According to fractional calculus theory, a fractional differential operator has a weak reciprocal, which can enhance the high-frequency components of a signal while retaining the low-frequency components [
21]. Therefore, by applying fractional calculus theory to image processing, the prominence of the edges of an image can be increased while retaining the textural information of the smooth areas of the image. It is generally believed that the value of fractional calculus theory and algorithms in image processing lies in their ability to add an additional degree of freedom. By selecting the appropriate fractional order and constructing a convolutional mask operator to select the fractional order
satisfactory results for image signal enhancement
and image signal denoising
can be achieved. Guo et al. derived the formula of a fractional differential operator, realised the enhancement of a two-dimensional (2D) image based on the Grumwald–Letnikov (G–L) definition and a fractional calculus model, and discussed its application in image processing [
21,
22,
23].
2.1. Construction Based on a Fractional Differential Operator
Based on the G–L definition, a
v-order differential can be expressed as follows (Equation (1)):
where
is the fractional differential order;
is the calculus step size;
a and
t are the lower and upper bounds for fractional calculus, respectively;
is the gamma function;
is the binomial coefficient.
The continuous interval of the one-dimensional signal
is defined as
and divided equally into units specified by
. Then, the equivalent expression of the
v (
v ≥ 0)-order fractional differential of the unary signal is
The 2D signal is defined by assuming that the fractional differential of for the two directions (x- and y-axes) are separable in certain conditions. Given the separability of the Fourier transform, it can be used to extend the fractional calculus from one-dimensional space to two-dimensional space. The 2D image signal is equally divided by (unit time) to realise the fractional differentiation of the x- and y-axes.
From the equivalent expression of Equation (3), the approximate solution of the fractional calculus of the
x- and
y-axes can be obtained as follows:
Using the limit form, the numerical expressions of the fractional differential in the
x- and
y-axis directions are as follows:
Equations (6) and (7) can be used to obtain the
order fractional differential operator coefficient
:
Assuming that the mask size is 3 × 3, i.e., if
N = 3, the approximate solutions for the two axis directions can be obtained using Equations (7) and (8):
2.2. Fractional Differential Enhancement Operator and Convolution Template
By extending the formula of fractional differentiation to the other six directions, the approximate solutions of fractional differentiation in these six directions can be obtained. The eight directions are rotationally invariant; thus, the approximate solutions of fractional differentiation in these eight directions are used to construct the fractional differential operator.
Thus, the eight-directional mask template is established as shown in
Figure 1. The coefficients for the positive and negative directions
of the
x-axis are defined as
and
, respectively, with
,
,
, and
in the counterclockwise direction. The coefficients for the positive and negative directions of the
y-axis are
and
, respectively.
The coefficients are defined as follows:
In an image, adjacent pixels have a certain similarity, and the closer the pixels are to the central target, the greater their similarity. Thus, the presence of too many adjacent pixels introduces unnecessary spatial and time complexities. Therefore, image processing should be aimed at exploiting the local neighbourhood pixel information of the target pixel. The 3 × 3 mask
in eight directions is used to perform convolution calculations on the image point
, which is 5 × 5 in size, as follows:
The convolution of each direction is calculated and weighted linearly to obtain the mask calculation results, as shown in Equation (15):
where
The image data are computed through the fractional differential mask convolution, and the convolution result is continuously enlarged or reduced. The results of convolution calculation can be normalised by defining the normalisation factor
q as
Then,
q is substituted into Equation (18), and a 5 × 5 mask template is used to obtain filtered data
:
2.3. Effect of the Fractional Differential Enhancement Algorithm on the Depth Image
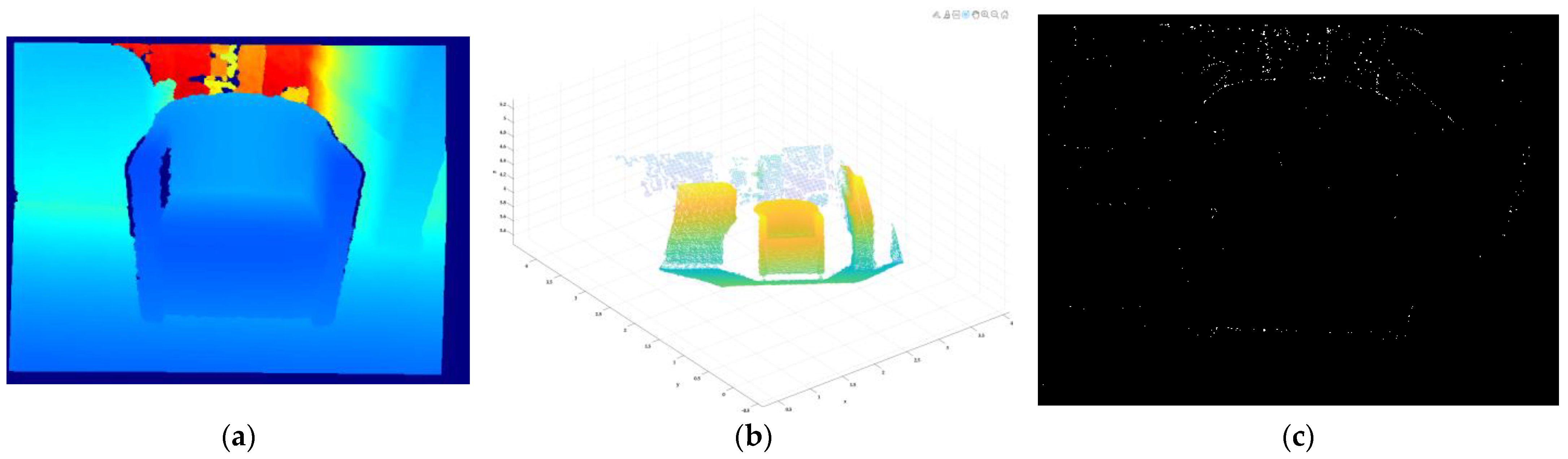
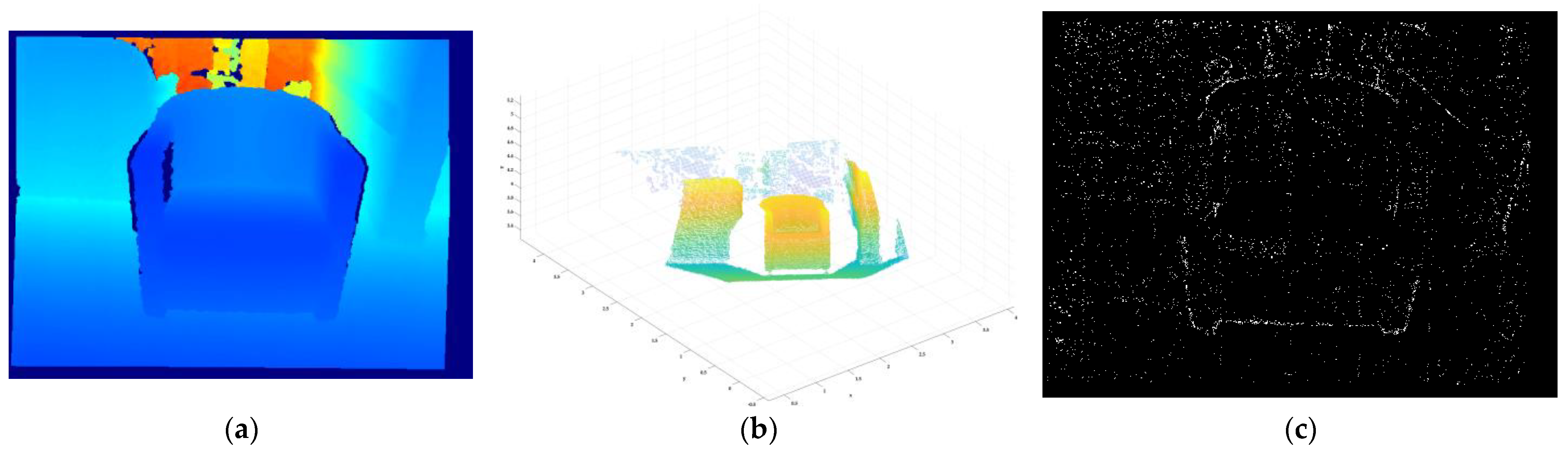
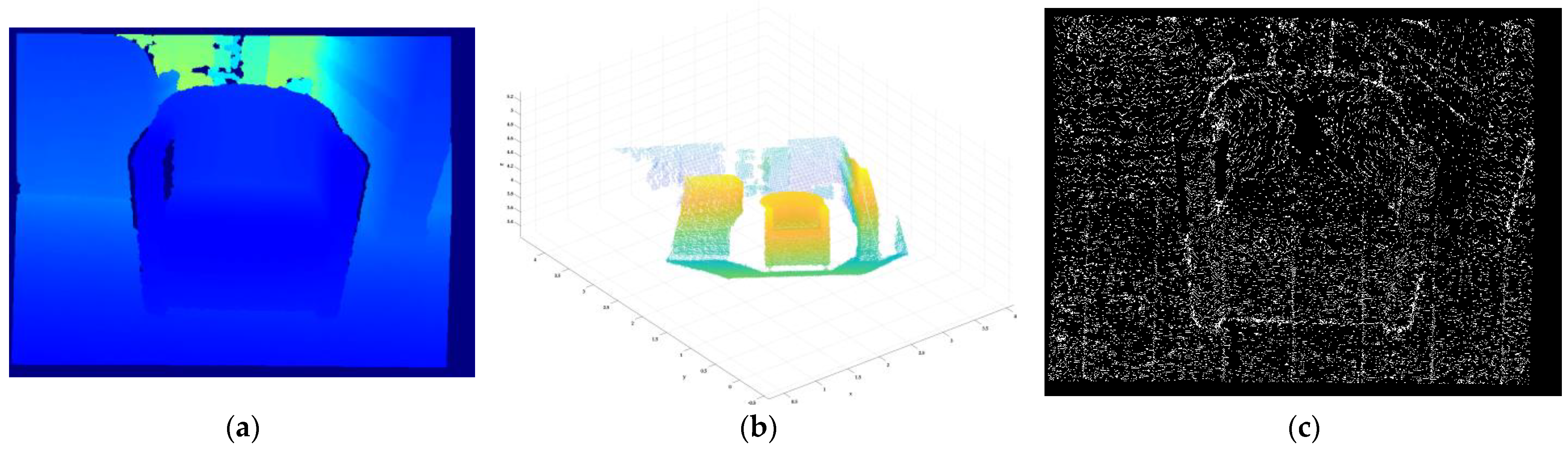
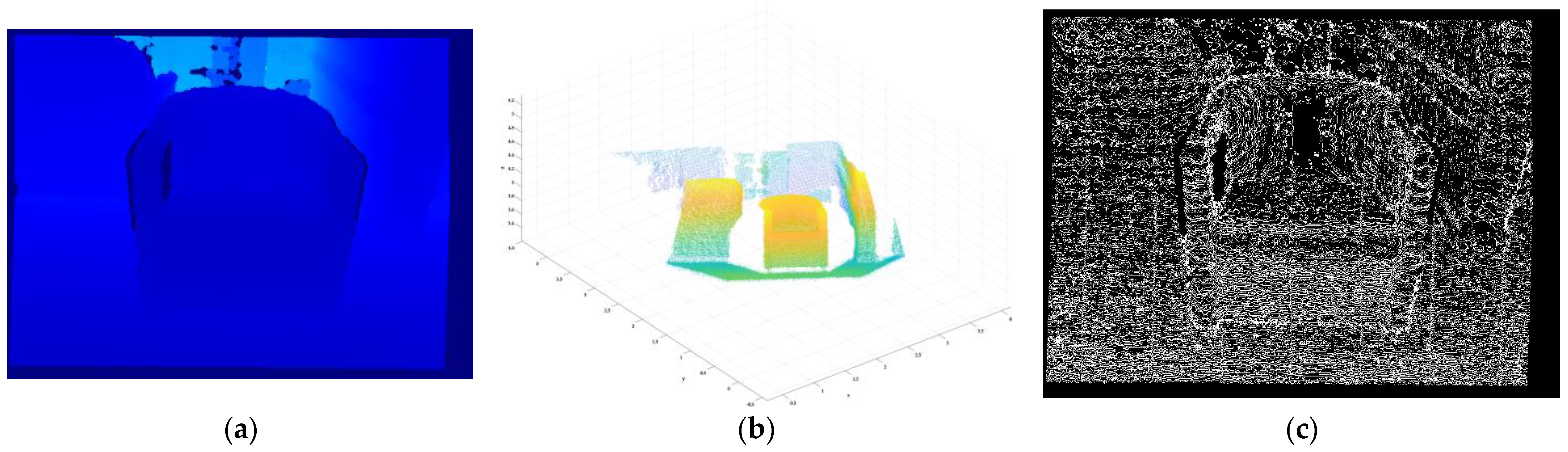
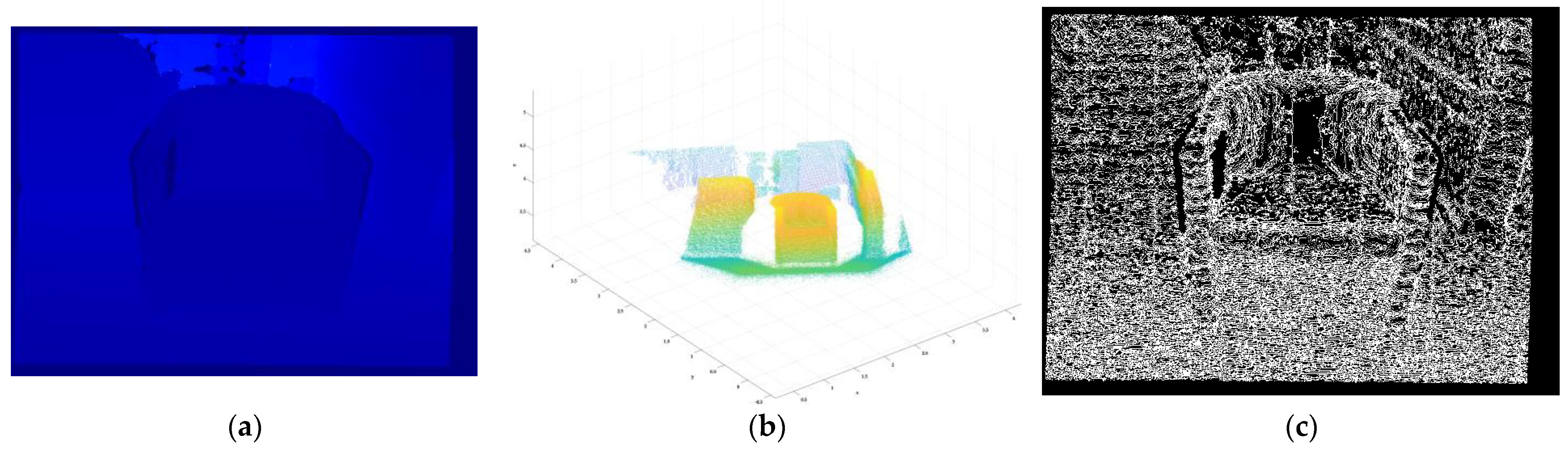
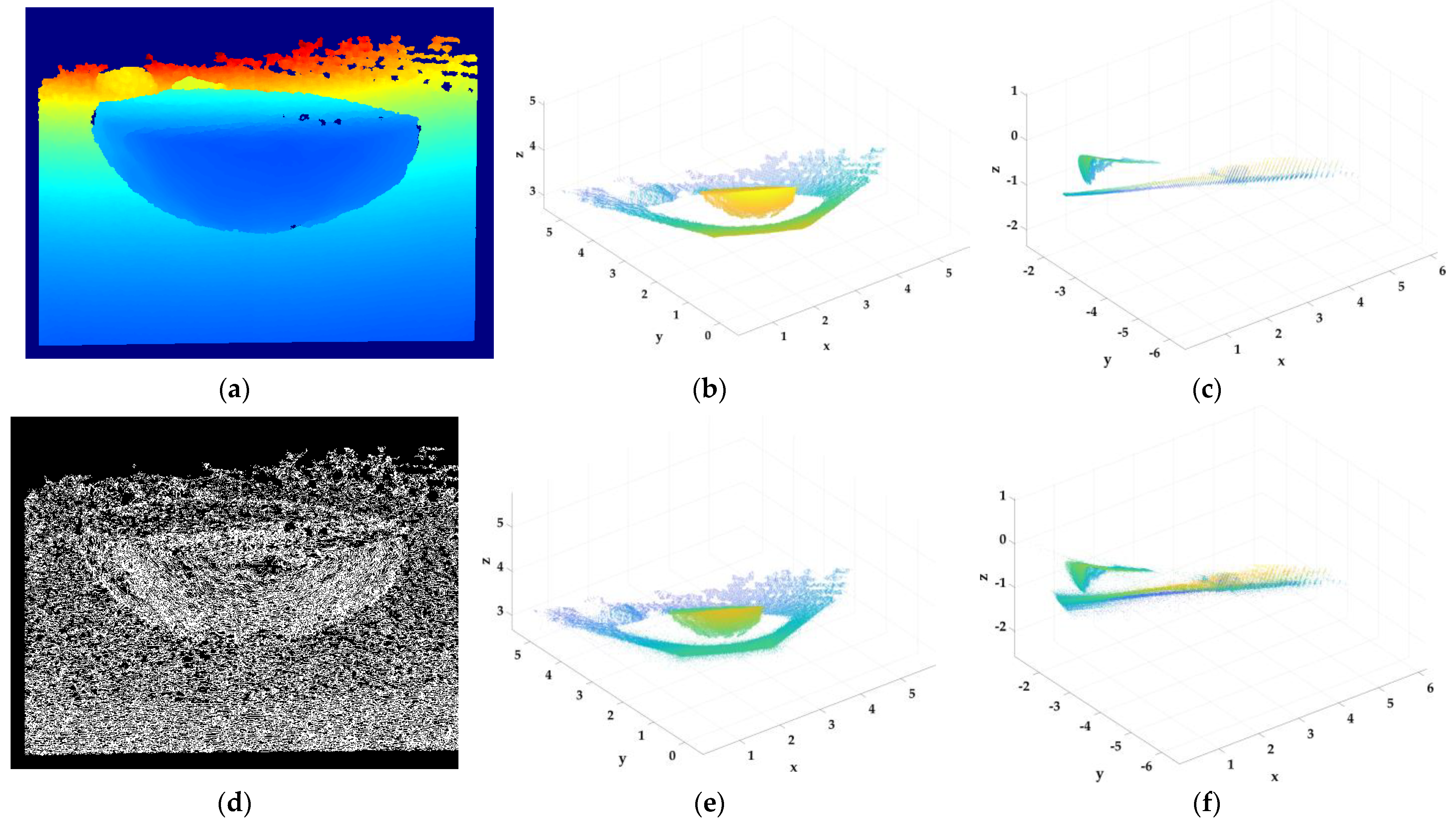
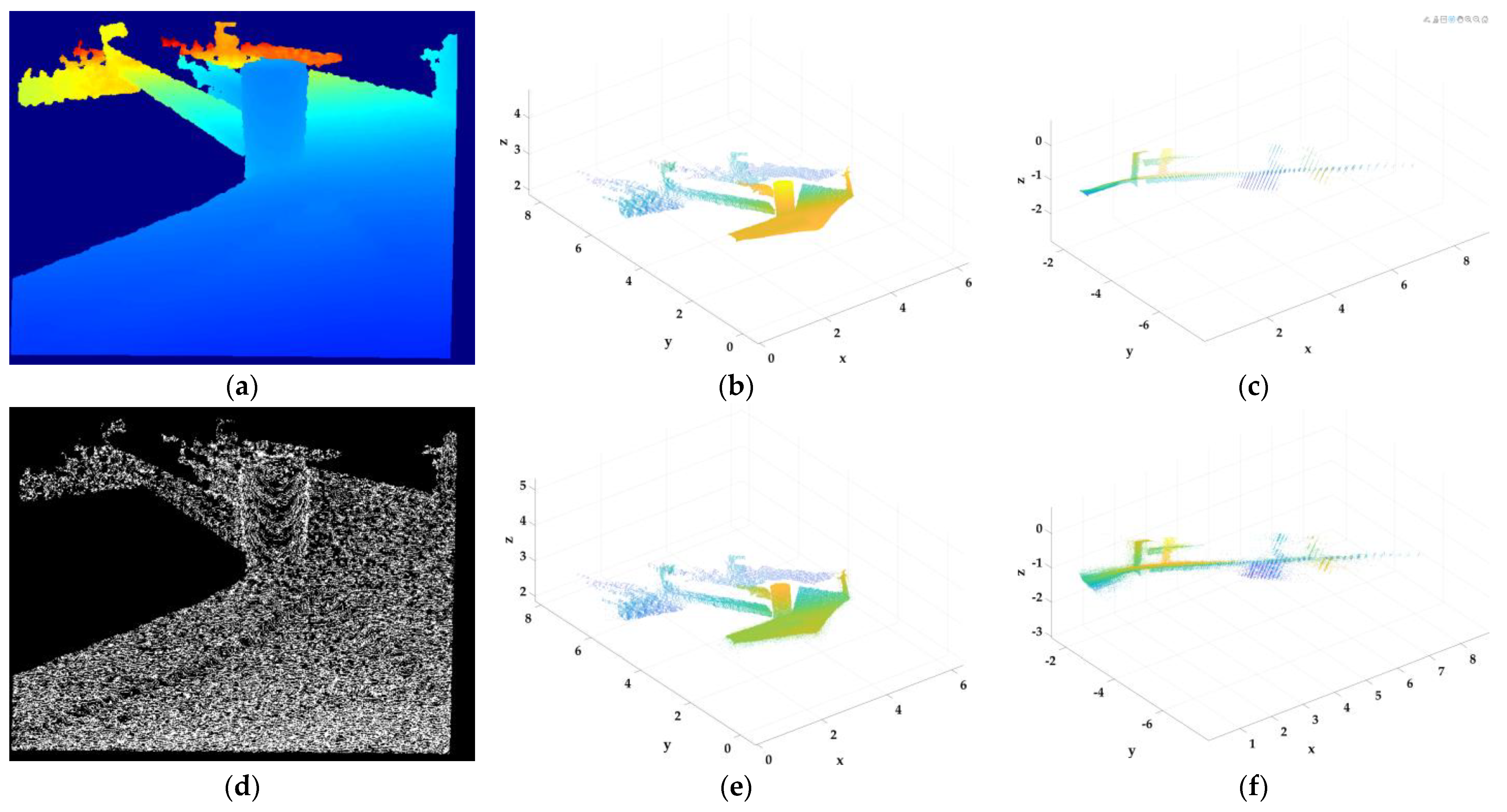
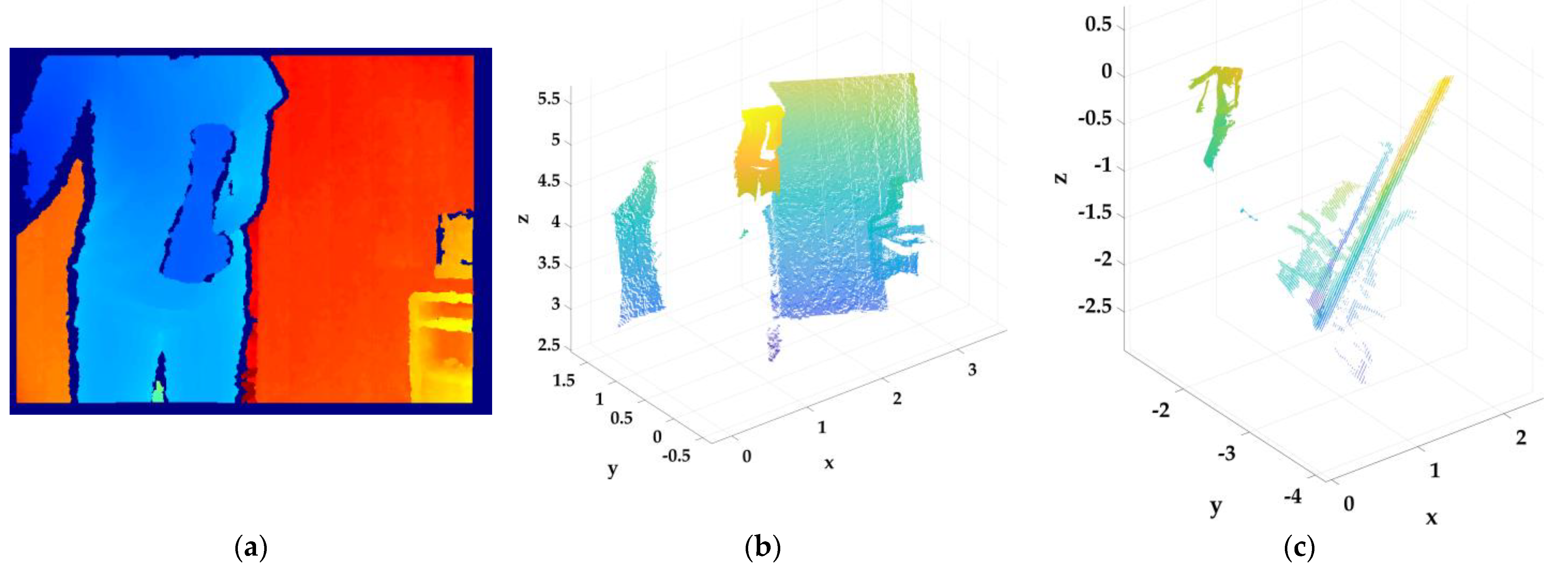
In a 2D image, noise and edges are discontinuities of the local features. The pixel values of noise and edges are considerably different from those of neighbouring areas. Thus, noise and edges correspond to high-frequency signals, which are enhanced by fractional differential pairs. Therefore, fractional differential filtering is performed on a depth image, and the filtered depth image and corresponding point cloud image are obtained.
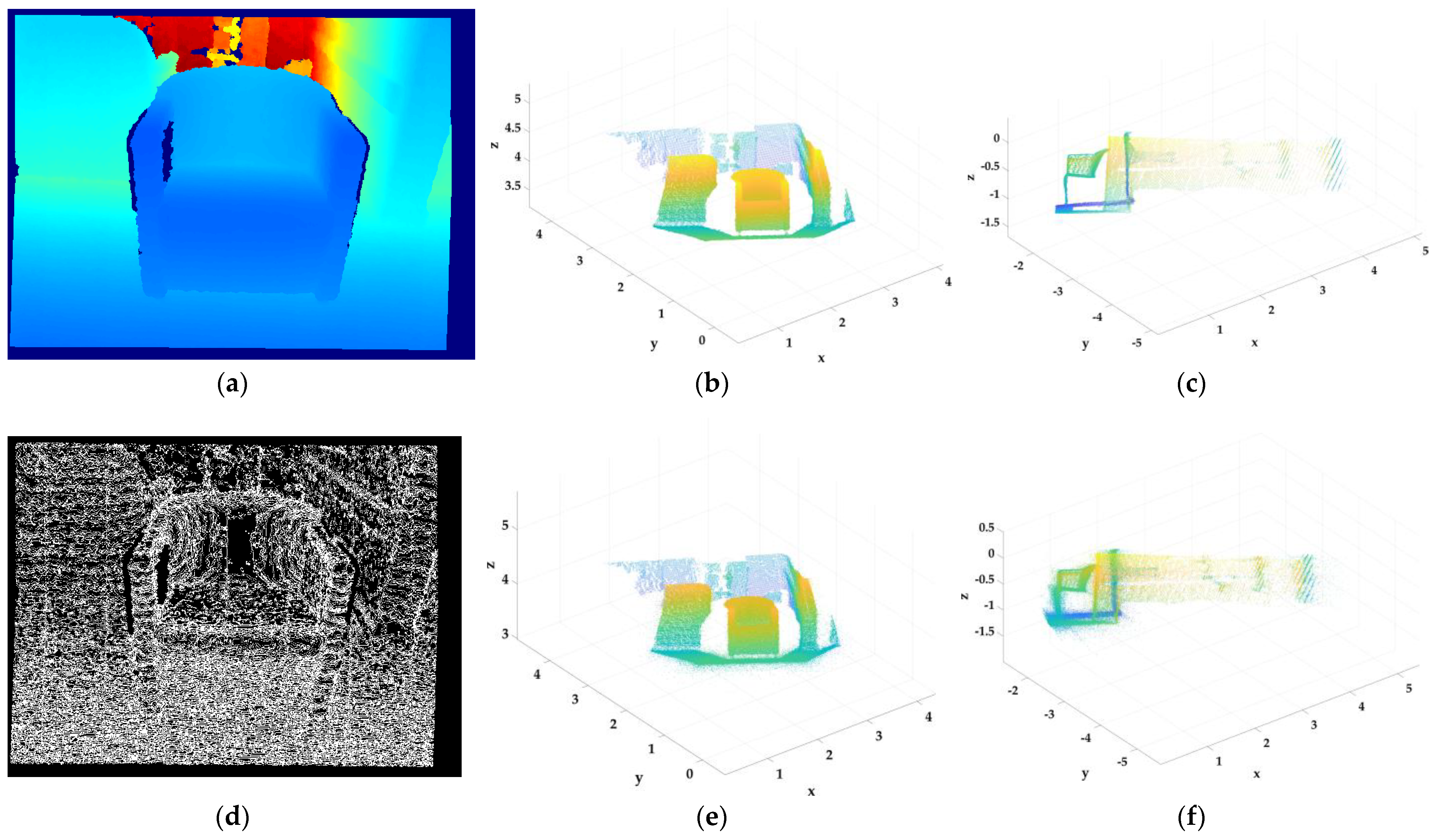
Figure 2 shows a depth image after fractional difference enhancement. The edge and noise points are enhanced to varying degrees. The point cloud image clearly shows the edges and several high-frequency noise spots. The objective of depth image enhancement is to enhance the textural information. However, as shown in
Figure 2, edge noise is introduced into the depth image after fractional differential enhancement. Because the presence of such noise can limit the application of depth images in practical applications, such as 3D reconstruction, the enhancement method must be modified to effectively enhance the textural information.
As shown in
Figure 2, the differential mask enhances high-frequency points or edge noise in the case of drastic changes in the edge information. However, the enhanced depth image cannot be used for 3D reconstruction. Moreover, according to experiments, gradient judgement-based methods cannot effectively distinguish weak noise from textural information.
3. Fractional differential-Inverse-Distance-Weighted Enhancement Algorithm
A depth image, also known as a range image, takes the distance (depth) from an image collector to each point in a scene as the pixel value, which directly reflects the geometric shape of the visible surface of the scene. Such images are also termed spatial distance images. Based on the principle of similarity, the depth value is used as a weight, and this is used to estimate a reasonable value for a point to be interpolated. Assuming that each adjacent point has a local influence, an inverse-distance-weighted model is constructed. The distance between the point to be interpolated and a sample point is used as the weighting factor for weighted summation. A sample point at a smaller distance corresponds to a higher weight, so the weight decreases as a function of the distance.
3.1. Design of the Fractional differential-Inverse-Distance-Weighting Algorithm
The point to be inserted into a space is defined as
, and known scattered points
exist in the neighbourhood of point
. The attribute value
of point
is interpolated using the distance-weighted inverse ratio method. The inverse distance interpolation principle states that in calculating the attribute value of the point to be inserted, the attribute value of the known point in the neighbourhood of this point must be considered. The attribute value of the point to be inserted is obtained from the inverse distance weighted average. The weight is related to the distance between the point to be inserted and point in the neighbourhood, where
is the power factor (
is generally set to 2).
where
is defined as the unit of distance from the point to be inserted to the
i-th point in its neighbourhood.
is defined as the distance from the point
to be interpolated to the adjacent point
, as follows:
The interpolation function
represents the weighted average of the function value
at each point, and
is the function of the reciprocal of the interpolation, as follows:
The interpolation function is introduced into the data weighting process after fractional filtering, and the equalisation parameter φ is introduced considering that the function value may be zero.
Overall, is the depth value of the image point to be filtered, is one of the convolution sums of eight fractional operators, and is the new depth value after filtering.
The weighting calculation formula is modified, and the linear weighting formula presented in Equation (19) is used—based on the inverse distance weighting method—to derive a new inverse distance weighting formula, as follows:
Q, obtained using Equation (17), is added into Equation (27), and the new
is obtained after applying the ν-order fractional differential filter with a 3 × 3 mask, as follows:
3.2. Depth Image Enhancement Effect of the Improved Algorithm
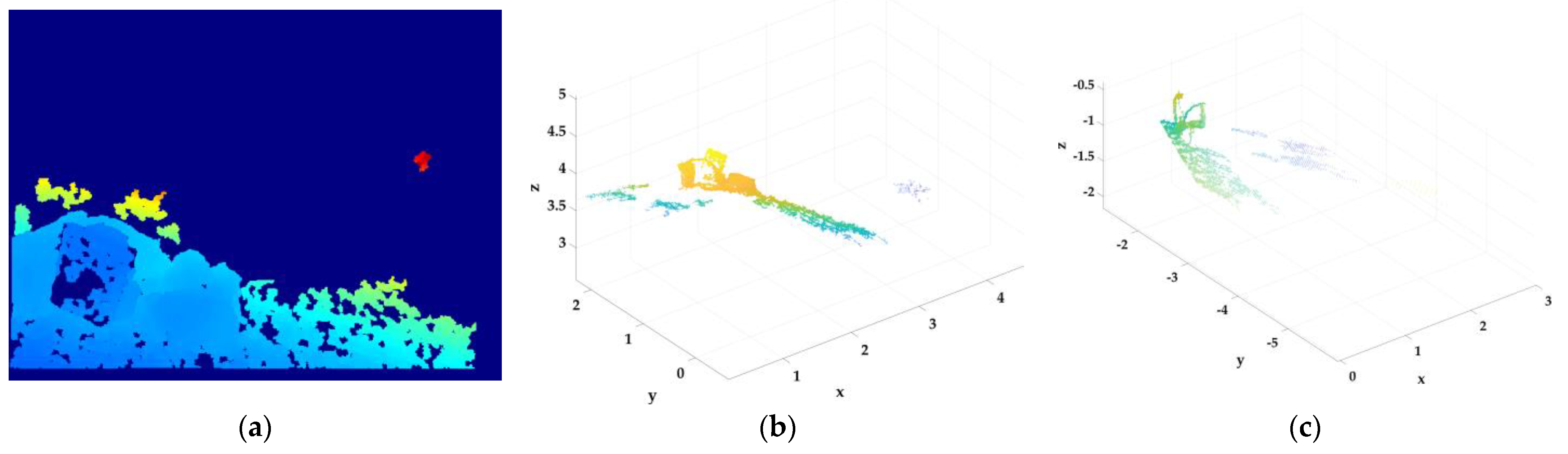
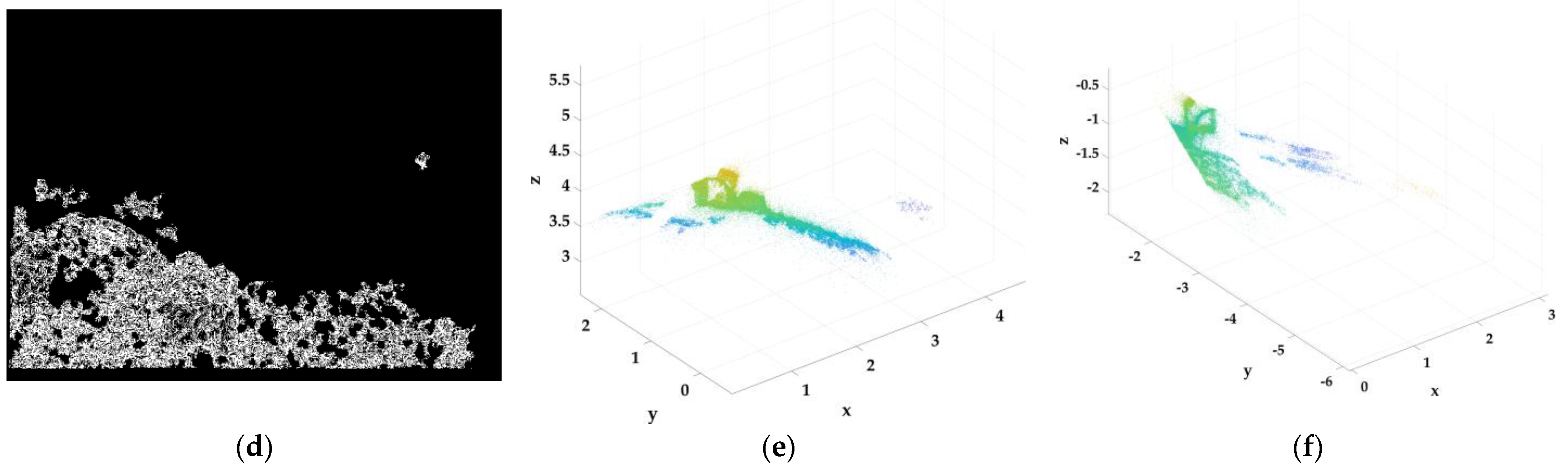
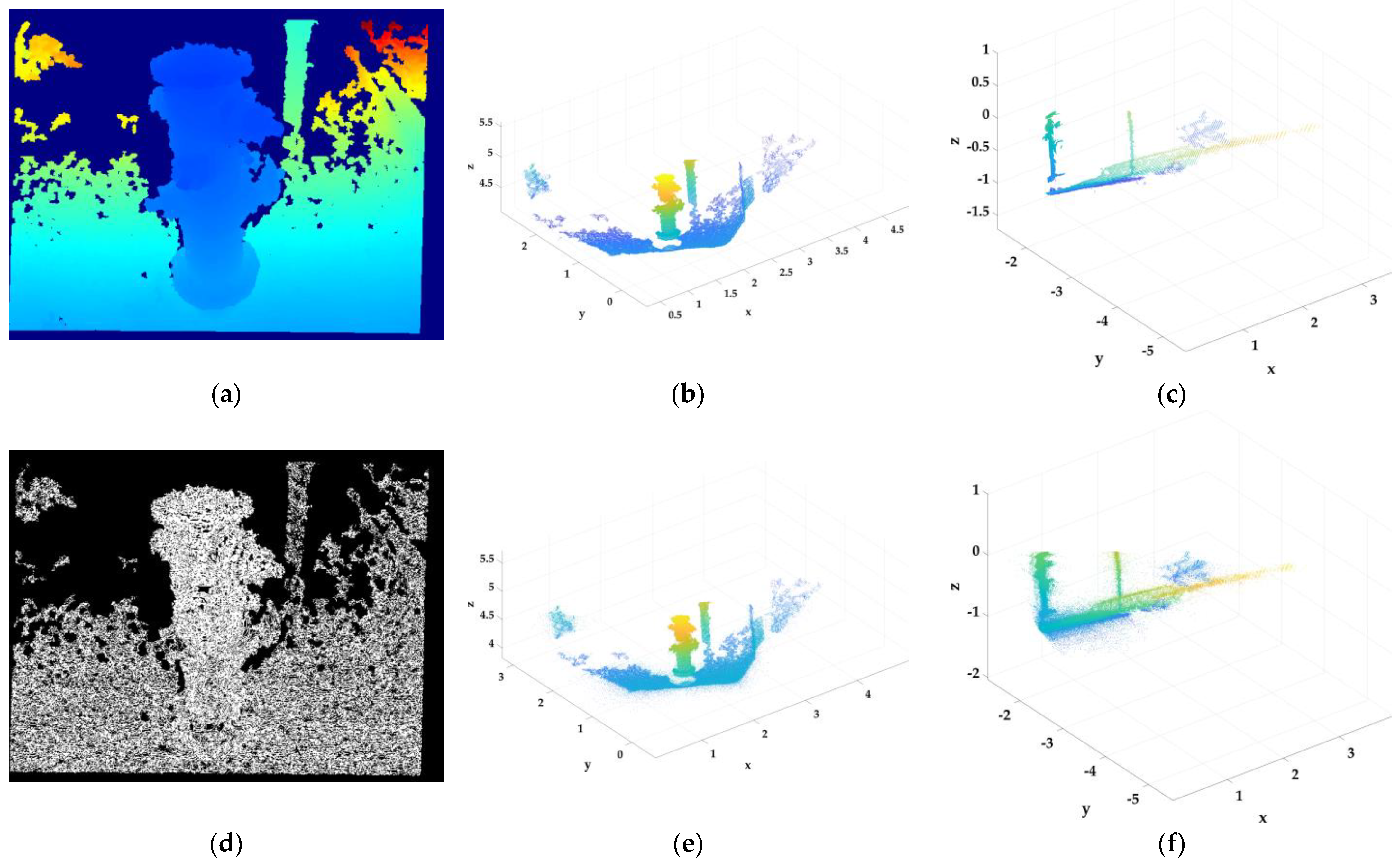
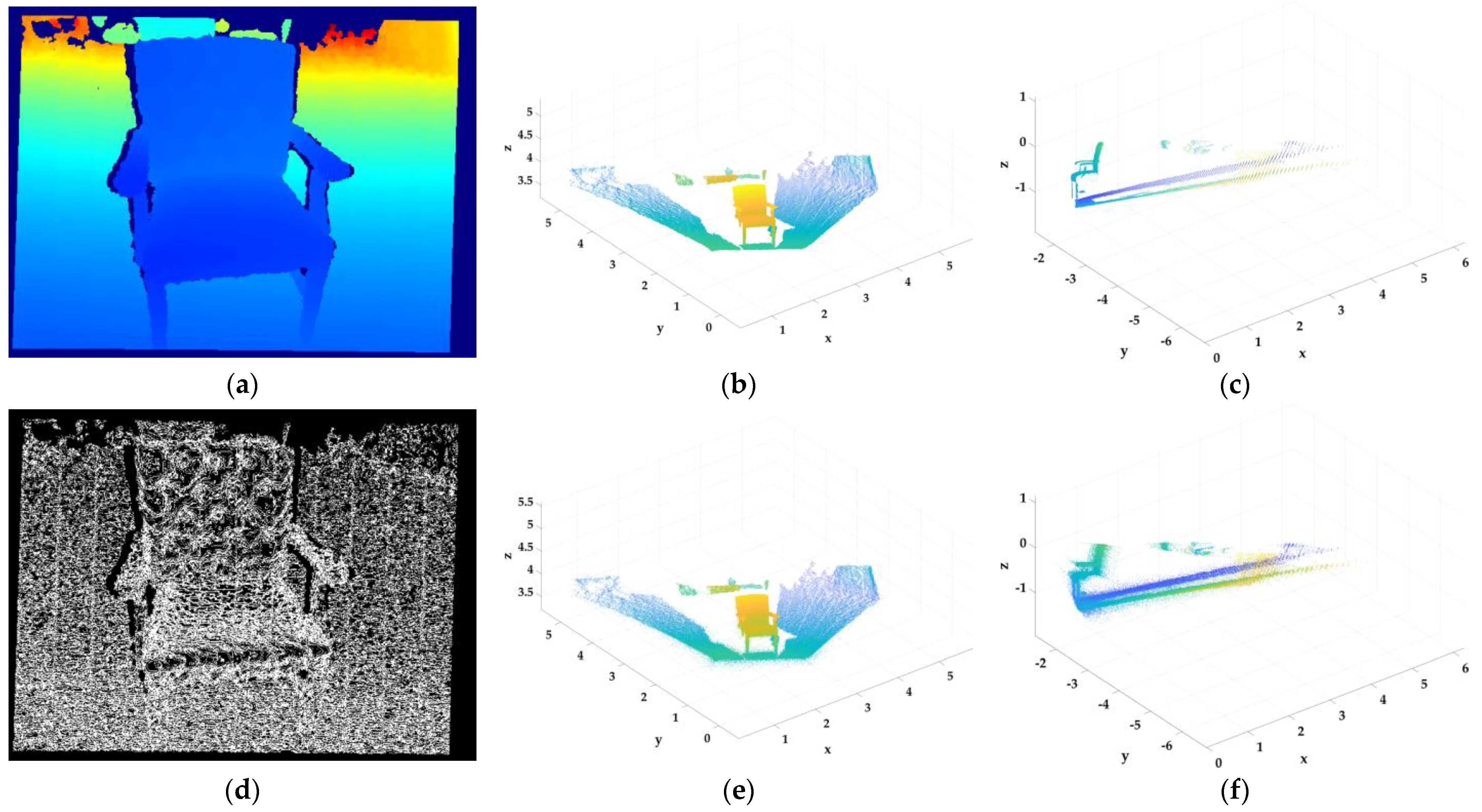
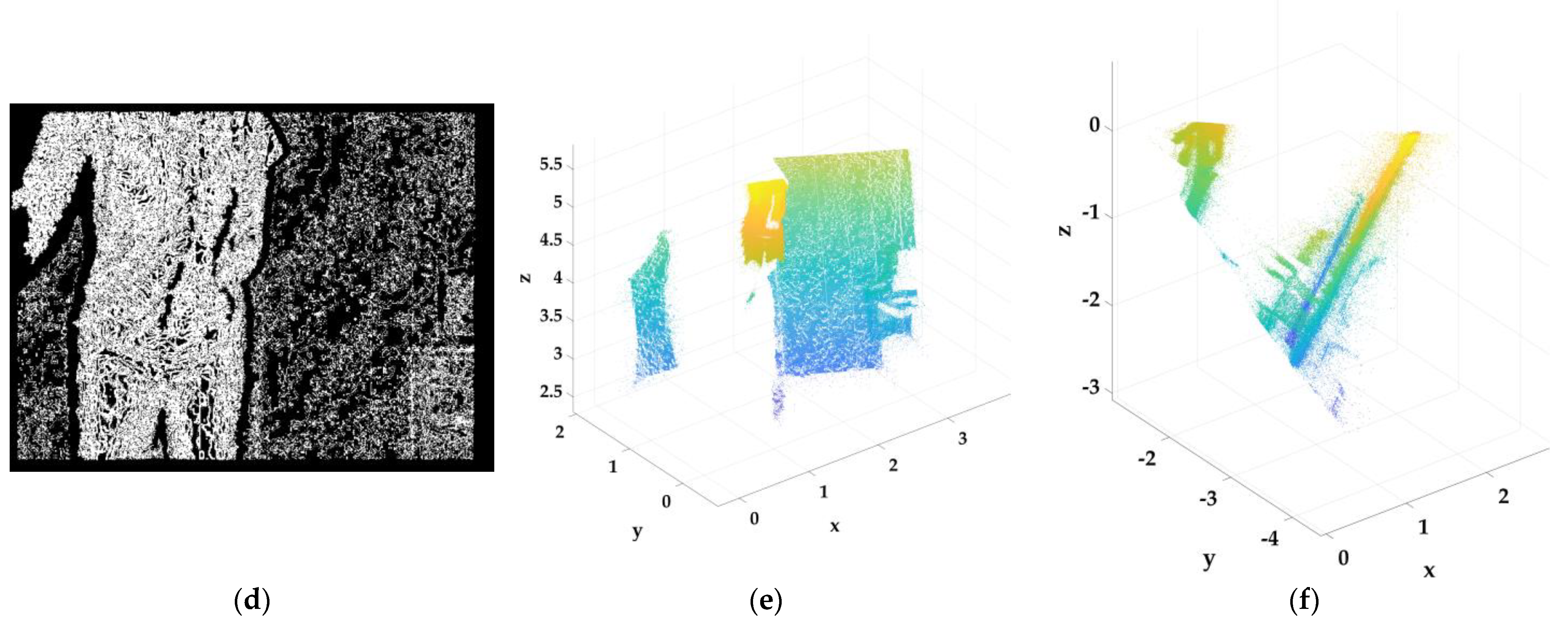
Equation (27) is applied to perform fractional differential enhancement of the depth image. The fractional order ranges from 0.1 to 0.9, and five iterations are performed.
Figure 3 and
Table 1 present the fractional differential enhancement effect associated with different orders.
Figure 3 shows that when the fractional differential order is greater than 0.5, excessive enhancement occurs. In contrast, when the fractional differential order is less than 0.5, the enhanced texture details are insufficiently rich. Therefore,
is set to 0.5 as the optimal enhancement order, based on subjective evaluation.
5. Discussion
Based on an examination of the existing depth image enhancement methods, a novel depth image enhancement algorithm based on a fractional differential is devised. The fractional differential-inverse-distance-weighted enhancement method is developed to solve the problem associated with high-frequency noise in fractional differential enhancement. First, image enhancement is performed based on fractional differentiation to effectively enhance the quality of a depth image. The contouring and high-frequency details of a depth image are enhanced by constructing a fractional differential mask for convolution. However, point cloud observation shows that this method introduces certain high-frequency noise at an edge. Thus, the image directly enhanced by fractional differentiation cannot be used for 3D reconstruction. Second, inverse distance weighting is applied to improve the weighted calculation of the convolution result of fractional differentiation. The improved fractional-order differential-inverse-distance-weighting algorithm can alleviate the high-frequency noise problem while maintaining the edge features of an enhanced depth image. The distance between the interpolation point and sample point is used as the weight factor to calculate the convolution result. The distance of the sample points is inversely proportional to the weight assigned in the inverse distance weighting process. The accuracy and smoothness of the resulting data are increased by the introduction of fractional filtering through the interpolation function. The experimental results show that the enhancement effect of the fractional differential-inverse-distance-weighting model is realistic and that uniform enhancement can be achieved, even after multiple iterations.
In summary, the effectiveness and superiority of depth image enhancement based on a fractional differential are demonstrated through theoretical and experimental studies, and a fractional differential-inverse-distance-weighted enhancement method is developed to solve the problems associated with fractional differential enhancement. This novel approach represents the first attempt at integrating a fractional differential into depth image enhancement and is an effective solution for depth image enhancement. For example, in the fields of medical image processing, machine vision, and autonomous driving, and compared with current methods, this algorithm could provide clearer depth images for more accurate recognition of objects and scenes.
Depth images have a wide range of practical applications, such as in 3D modelling, robot navigation, and virtual reality. Therefore, future research directions could include and verify the utility of the fractional differential enhancement algorithm in practical application scenarios and explore more efficient algorithms. First, depth image enhancement should be further combined with the depth image data required for an actual scene, and the algorithm should be applied to a scene requiring additional textural information for its depth image. Second, as the algorithm is not efficient enough to achieve real-time depth image enhancement, further research on the computational speed of the algorithm is an important future research direction. The algorithm can be implemented using a graphics processor or neural network processing unit to enable real-time depth image enhancement. Finally, the effect of the algorithm on 3D reconstruction after depth image enhancement and the 3D reconstruction of depth images with more abundant textural information than those in this study must be explored in future studies.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}