

Field-Programmable Analog Array Implementation of Neuromorphic Silicon Neurons with Fractional Dynamics




Abstract
:1. Introduction
2. Fundamentals
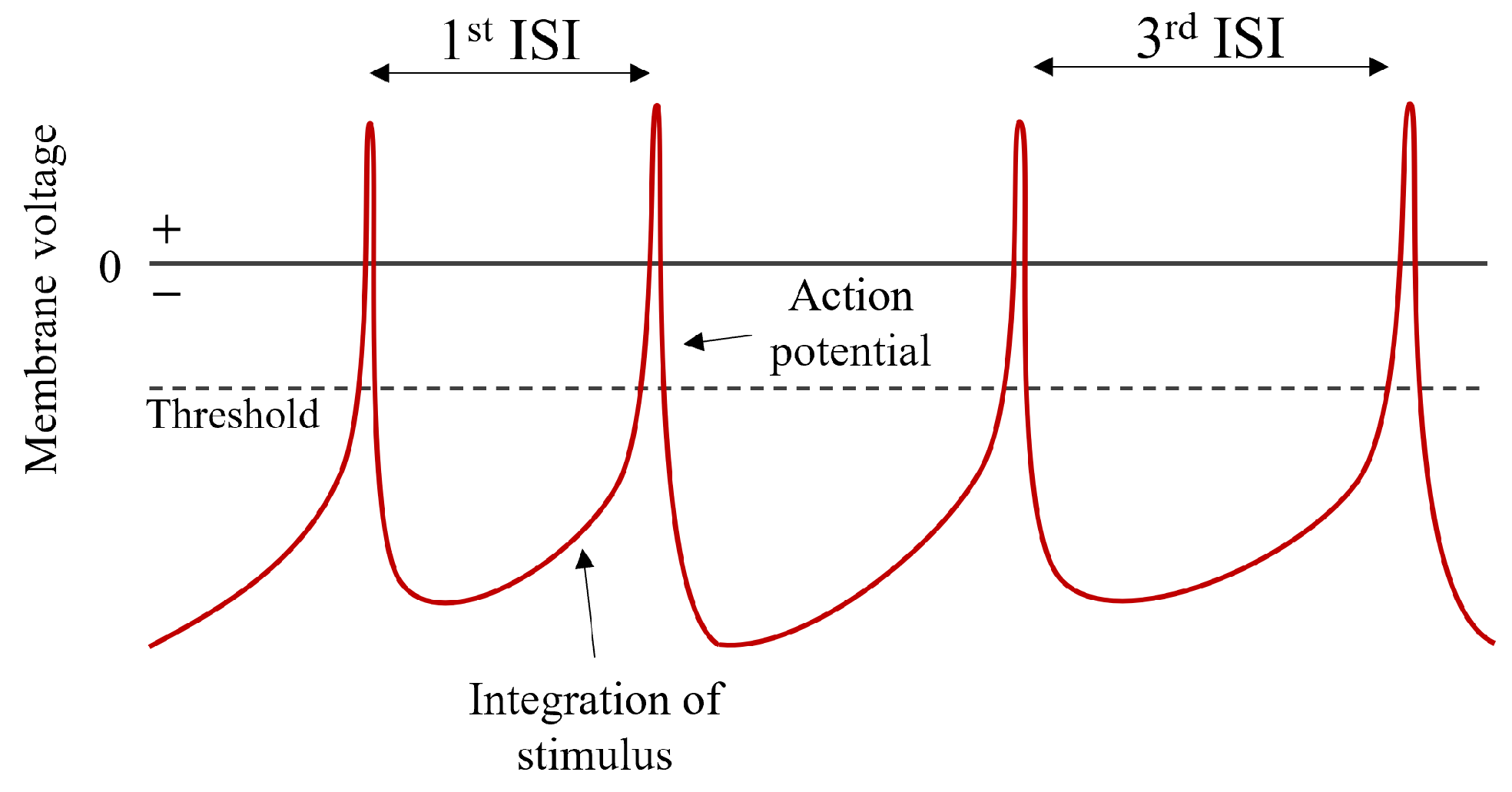
2.1. Biological Neurons
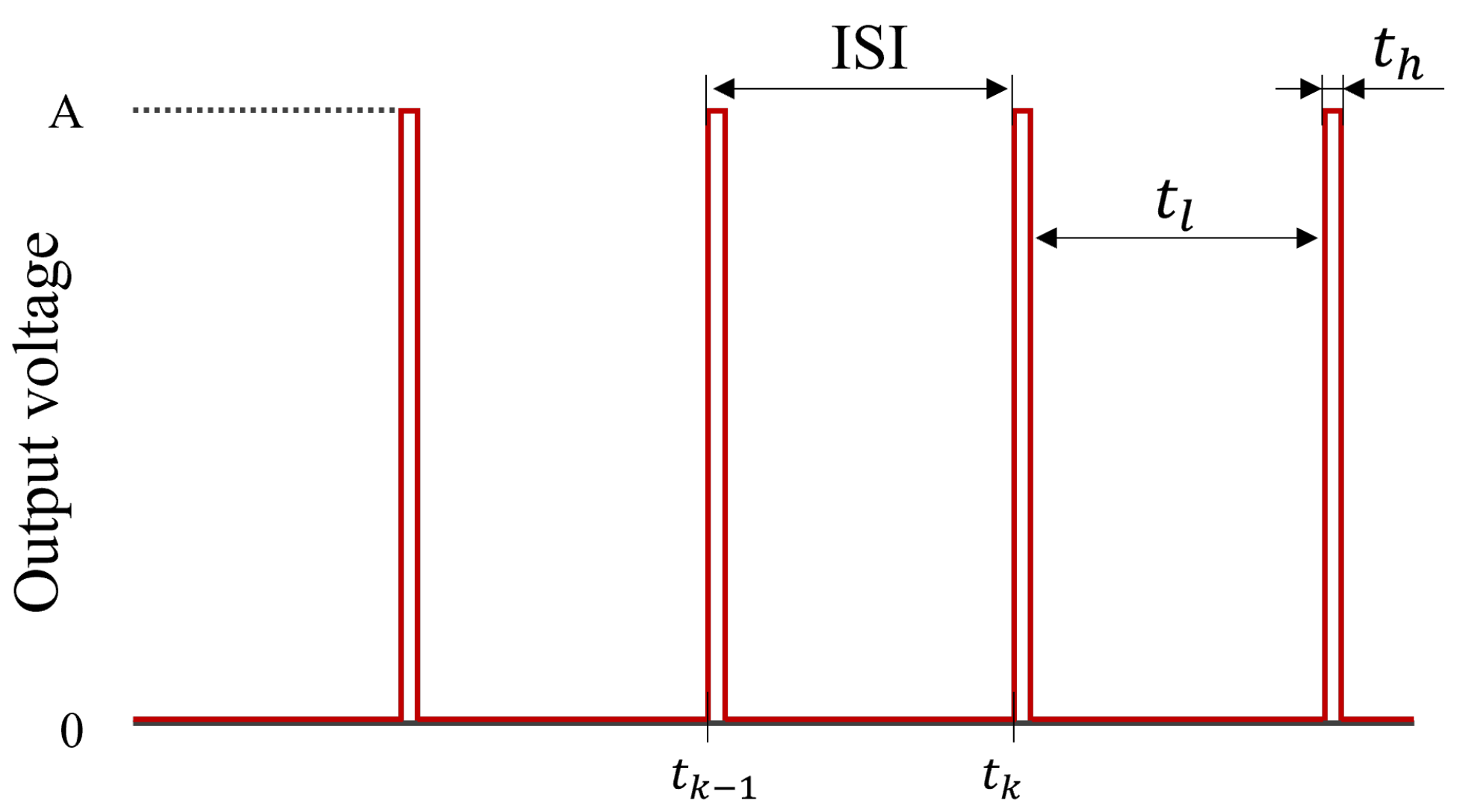
2.2. Pulse-Frequency Modulation
2.3. Silicon Neurons
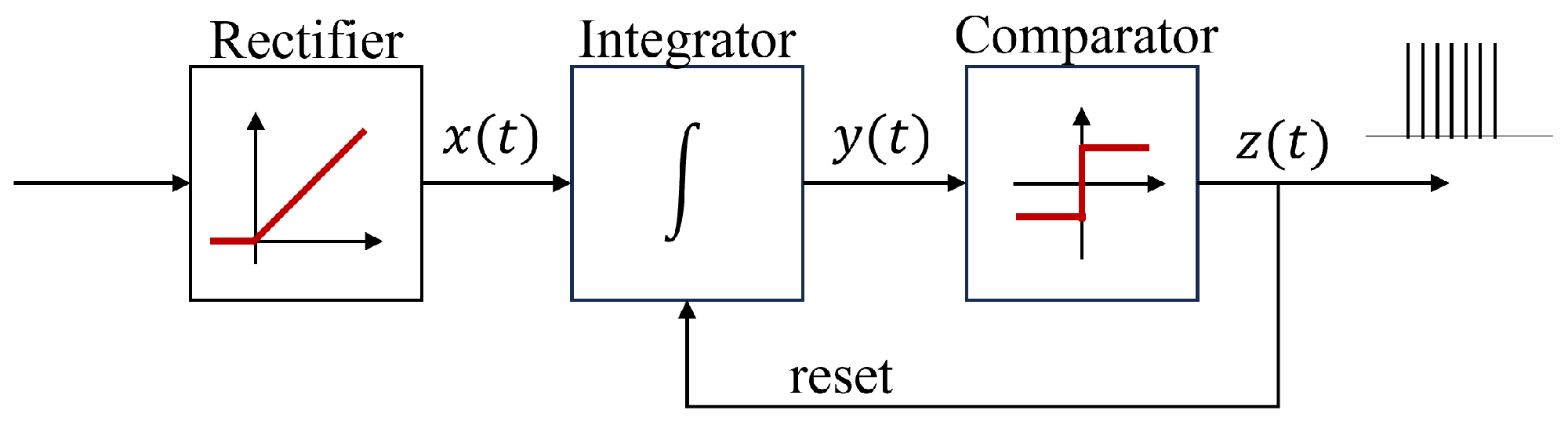
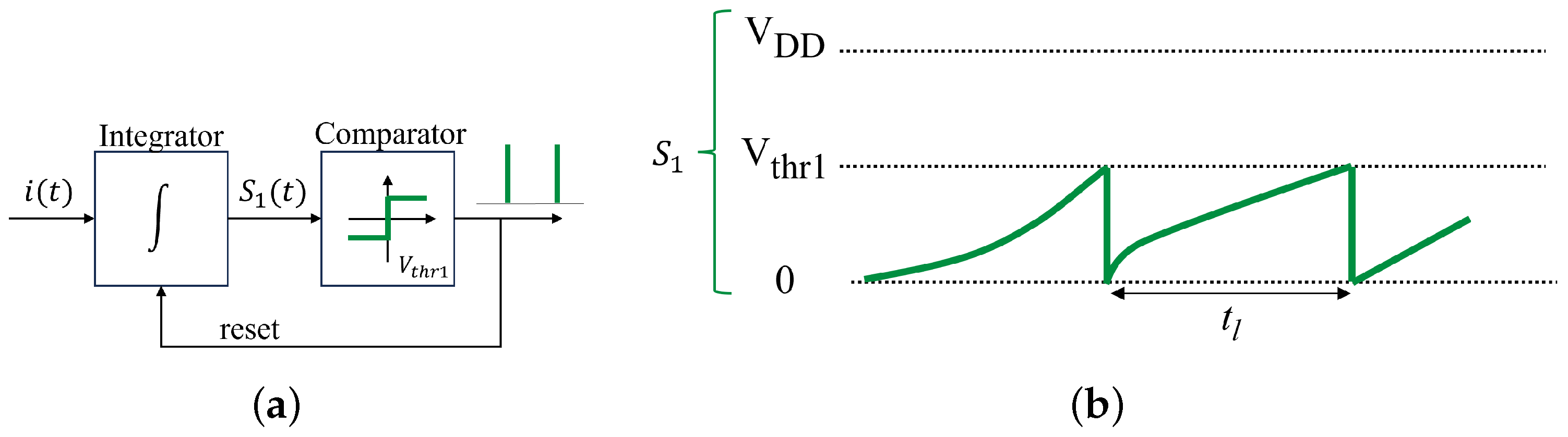
2.3.1. Integrate-and-Fire Neurons
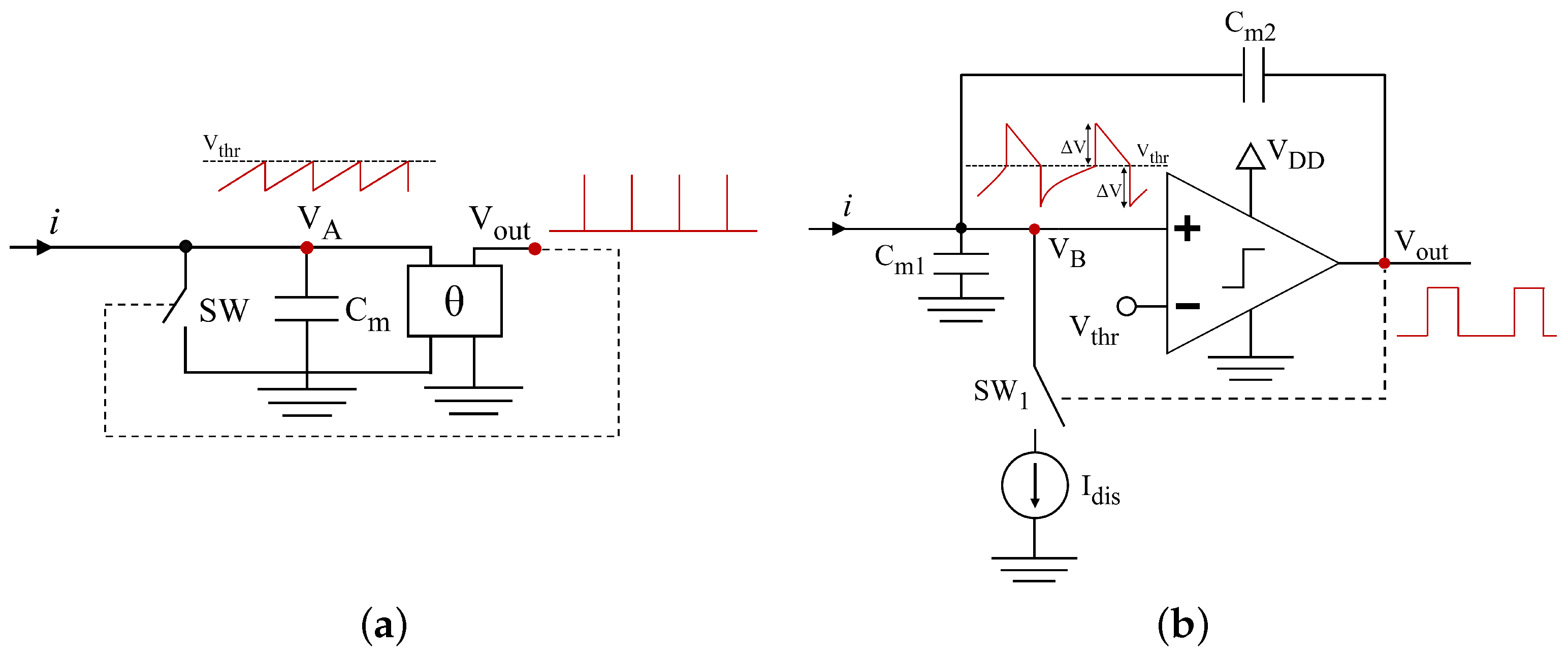
2.3.2. Axon-Hillock Circuit
- It does not actually implement IPFM, but something that is very close to it, for narrow pulse widths. Therefore, in the next section, a new type of neuron capable of performing PFM is proposed and compared to the A-H neuron.
- It cannot be directly reproduced in the FPAA because individual electronic components cannot be used. However, CABs, which can implement integrators and comparators, are available in an FPAA and can be used to mimic the input-to-output behavior based on analog principles. Having a quickly configurable neuron could help to verify designs prior to the final fabrication of the silicon neurons.
2.4. Fractional Operator
2.5. Fractional-Order Integrate-and-Fire Neurons
3. Analog Implementation
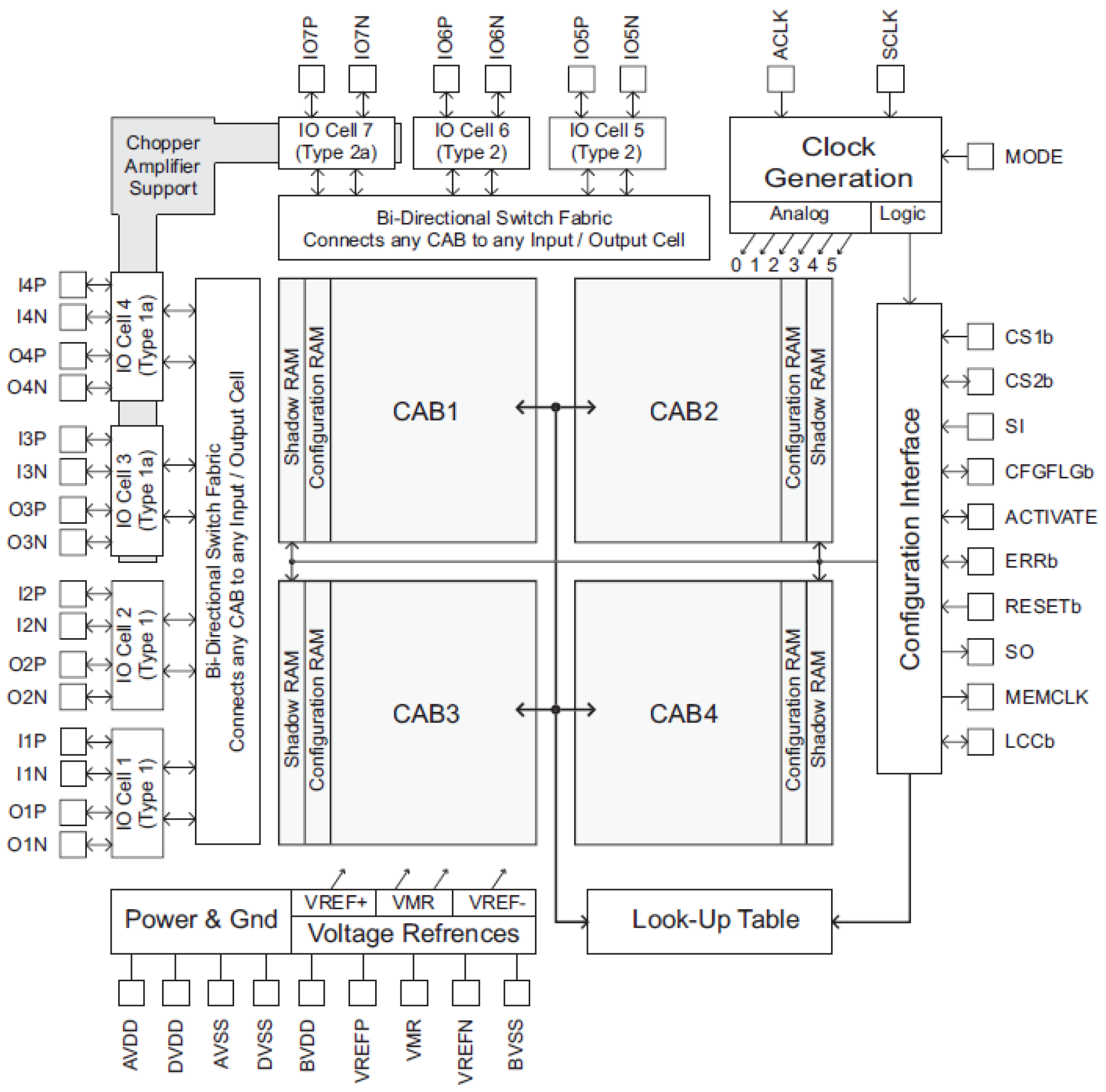
3.1. Anadigm’s FPAA
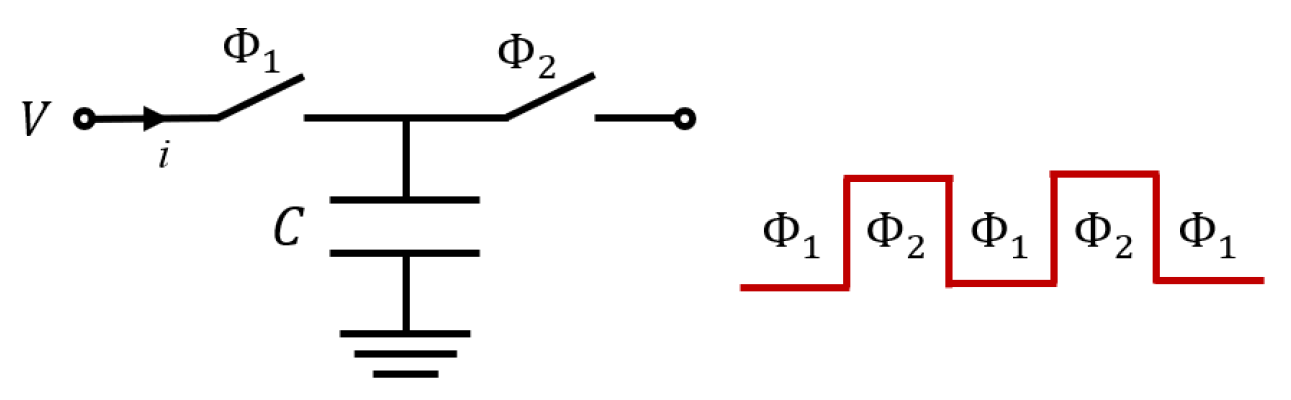
- The FPAA uses switched capacitor technology, which mimics the behavior of other components, such as resistors, by controlling the current flowing to or from capacitors. Figure 7 illustrates the concept. One consequence is that the values of the parameters of a CAM are quantized and limited to a frequency-dependent range. It also causes some CAM signals to be sampled in one of two non-overlapping phases of the clock, while others are processed in continuous time. Therefore, the clock frequency and the phase in which the signal is processed affect the design process. Continuous-time CAMs are preferred when possible.
- The FPAA operates internally with differential signals centered around a mid-rail voltage (VMR) of 1.5 V, which is the internal signal reference. Therefore, the common mode voltage of the signals is 1.5 V. The differential mode ranges from −3 to +3 V. Both differential and non-differential signals can be connected to the FPAA. In the case of non-differential ones, the negative pin is connected to VMR.
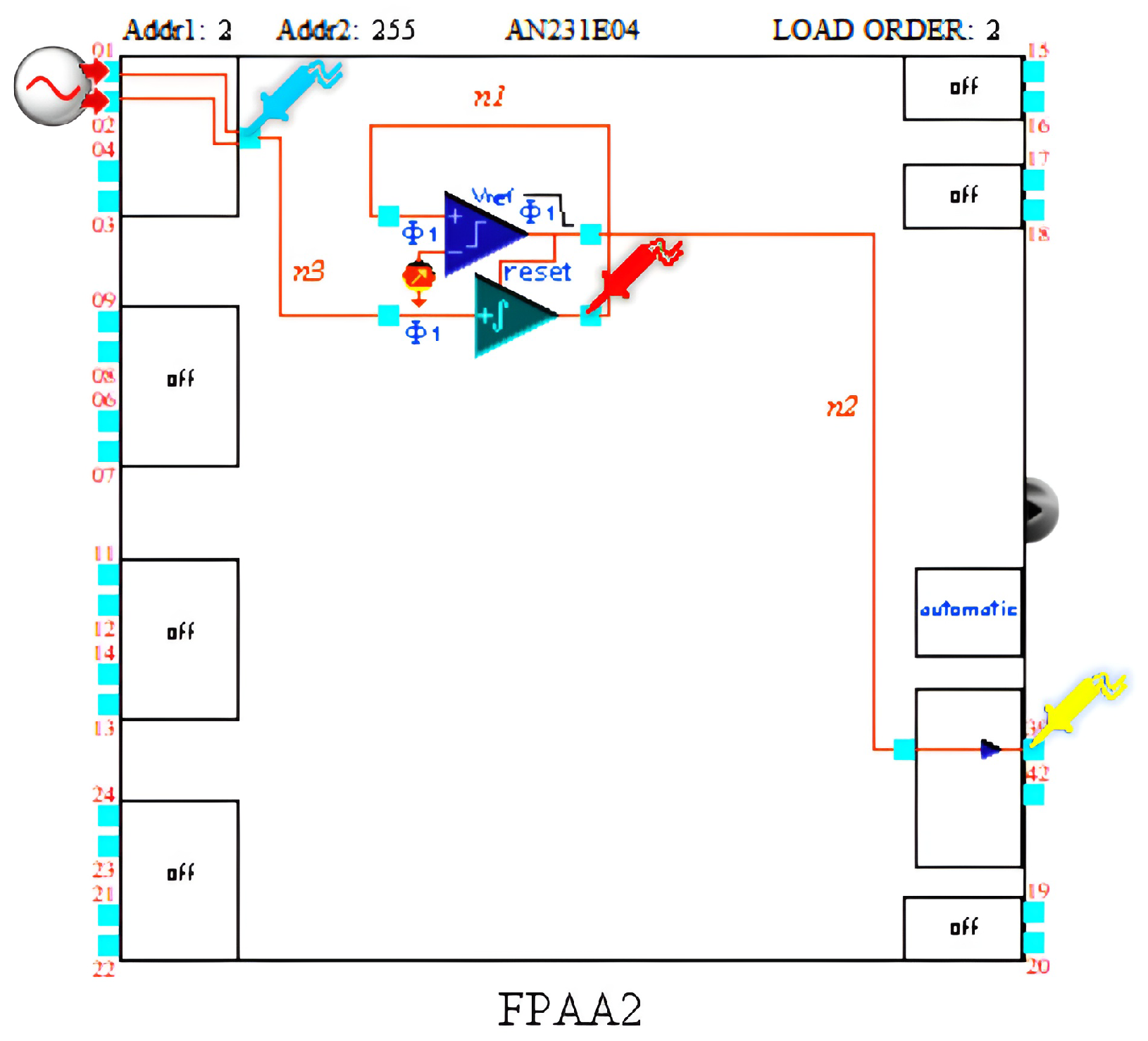
- The CAMs can be configured as: (a) Integrators and SumIntegrators, which are single-input and two- or three-input integrators, respectively, with integration constants programmable for each input (on the scale of µs−1) and with an optional reset function controlled by a comparator that is part of the same CAM; (b) Comparators, which produce digital output levels that go high when the input is greater than an internal programmable reference or an external signal; (c) FilterBilinears (BFs), which can be programmed as low-pass, high-pass, and all-pass filters or as zero-pole pairs; (d) GainInv and GainHold, which are the continuous-time and half-cycle gains, respectively; and (e) SumInv and SumDiff, which are the continuous-time and half-cycle summing blocks, respectively, with three and four possible inputs, respectively. CAMs are typically recommended to have a clock frequency of 4 MHz or less, with the exception of comparators, which can be used at 8 MHz. Here, the highest clock frequency will be used to achieve neuron behaviors closer to pure analog versions, i.e., closer to mimicking asynchronous strategies.
3.2. Integer-Order Neurons
3.2.1. Dirac Delta-Pulsed Neuron
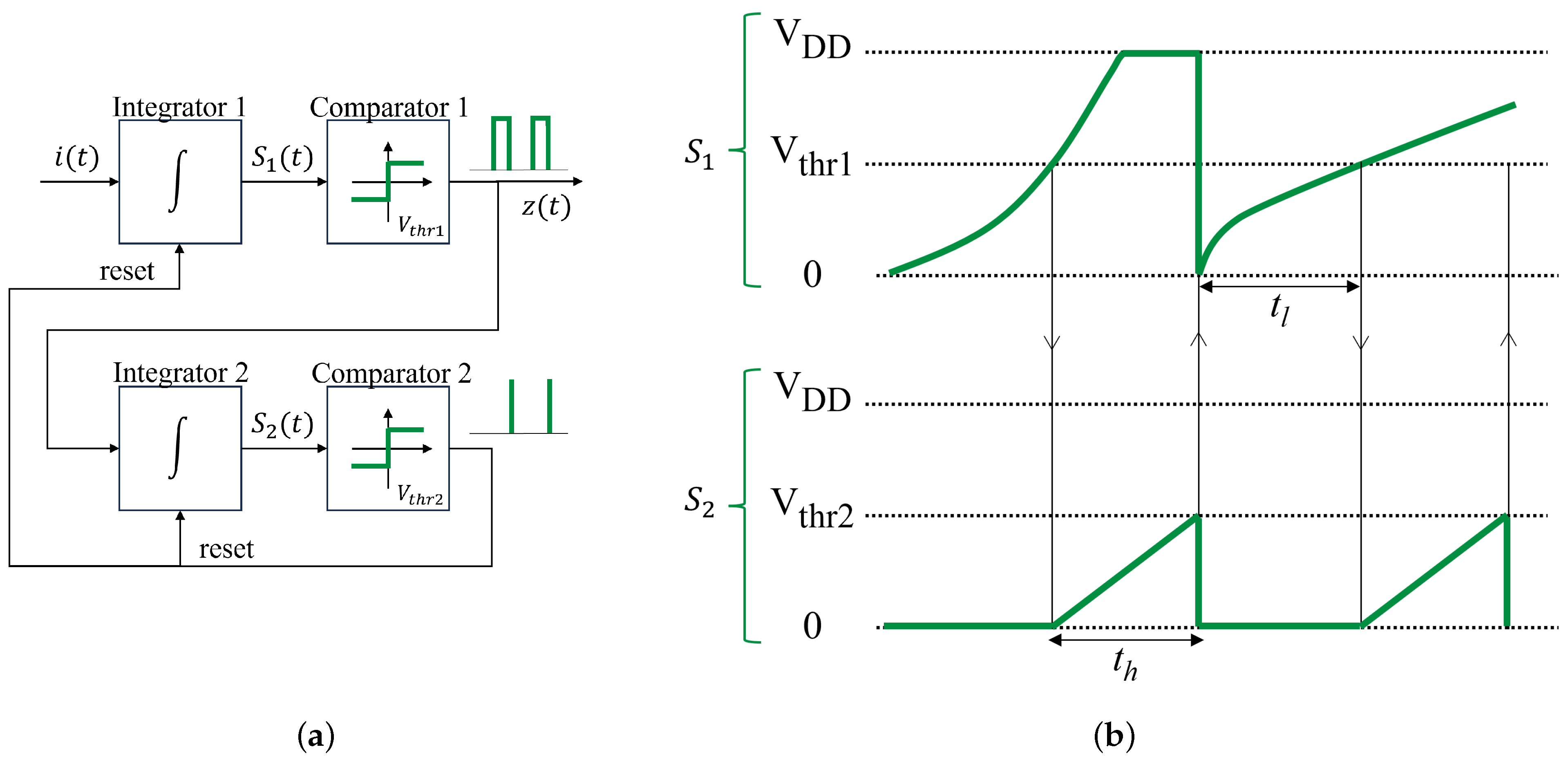
3.2.2. Axon-Hillock-Like Neuron
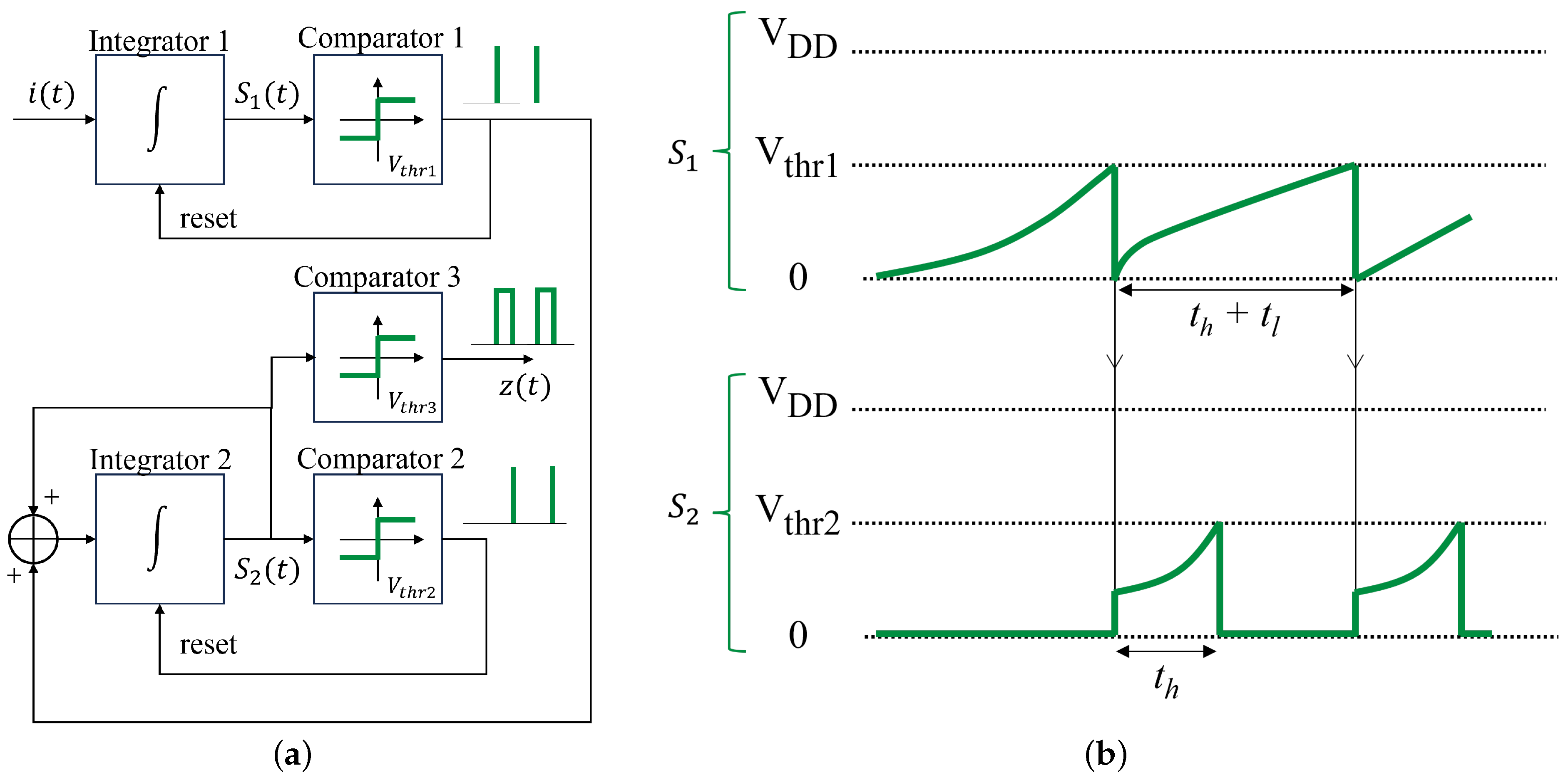
3.2.3. True-PFM Neuron
3.3. Fractional-Order Operator
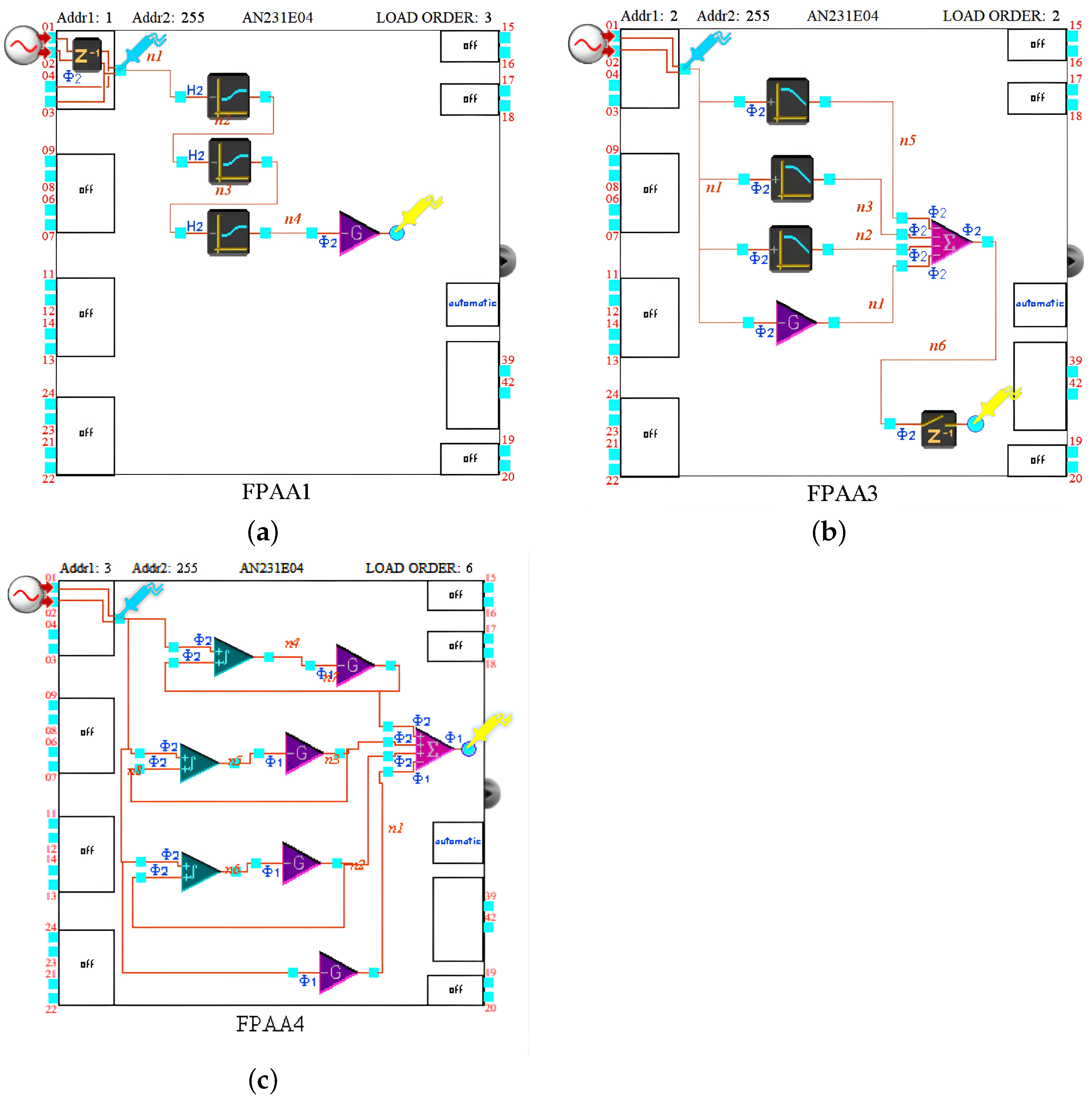
- Setting up the BFs as zero-pole pairs in series to match transfer function (11), similar to [23]. This implementation will be referred to as BFs in series. Each of these CAMs has the following transfer function:where is the gain at high frequencies, and and are the zero and pole frequencies, respectively, with the condition:where is the static gain. In this form, the number of BFs required is equal to the order of the approximation to match the number of poles and zeros. Because the BFs have an inverted output, when dealing with an odd approximation order, an inverted gain must be connected to achieve a non-inverted operator. To implement the constant of (11), its value can be distributed among the BFs gains and/or the additional inverting gain. Furthermore, as recommended in the documentation, the I/O cell is configured as an input with sample and hold that samples during phase 2. Figure 14a shows the implementation for this case for an approximation of order three (i.e., ).
- Using the BFs as low-pass filters, along with summing blocks and a gain, to obtain transfer function (12). This implementation will be referred to as BFs in parallel. Each of these CAMs has the following transfer function:where is the corner frequency, and G is the gain. The CAM output can either be inverted or non-inverted. To implement the FO operator in the PFE form, the number of BFs required is equal to the order of the approximation in order to match the number of poles. The corner frequency in each CAM is chosen to be equal to each pole frequency (), while G is used to adjust the filter gain (), where subscript i denotes each zero-pole pair of the approximation. The constant is implemented as a gain block and it is added to the BF outputs thanks to the summing blocks. When using half-cycle summing blocks, the output is held using a sample and hold block or I/O cell configured as output with sample and hold. In Figure 14b, the schematic of this implementation is illustrated again for an approximation of order three.
- Using individual integrators and gains to assemble low-pass filters and thus transfer function (12), similar to [24]. This implementation will be referred to as individual integrators. Each negative loop making up the low-pass filter has the following transfer function:where and are the constants of the integration of the individual integrator, and G is the value of the gain connected to it. The number of loops required is equal to the order of the approximation, i.e., N integrators and N gains. The integration constants are chosen to satisfy , and (again, subscript i denotes the pairs zero-pole of the approximation). The constant is implemented through an additional inverting gain. The loop outputs and the constant are added by using summing blocks. The schematic of this implementation is shown in Figure 14c also for an approximation of order three.
3.4. Fractional-Order Neurons
4. Results
4.1. Integer-Order Neurons
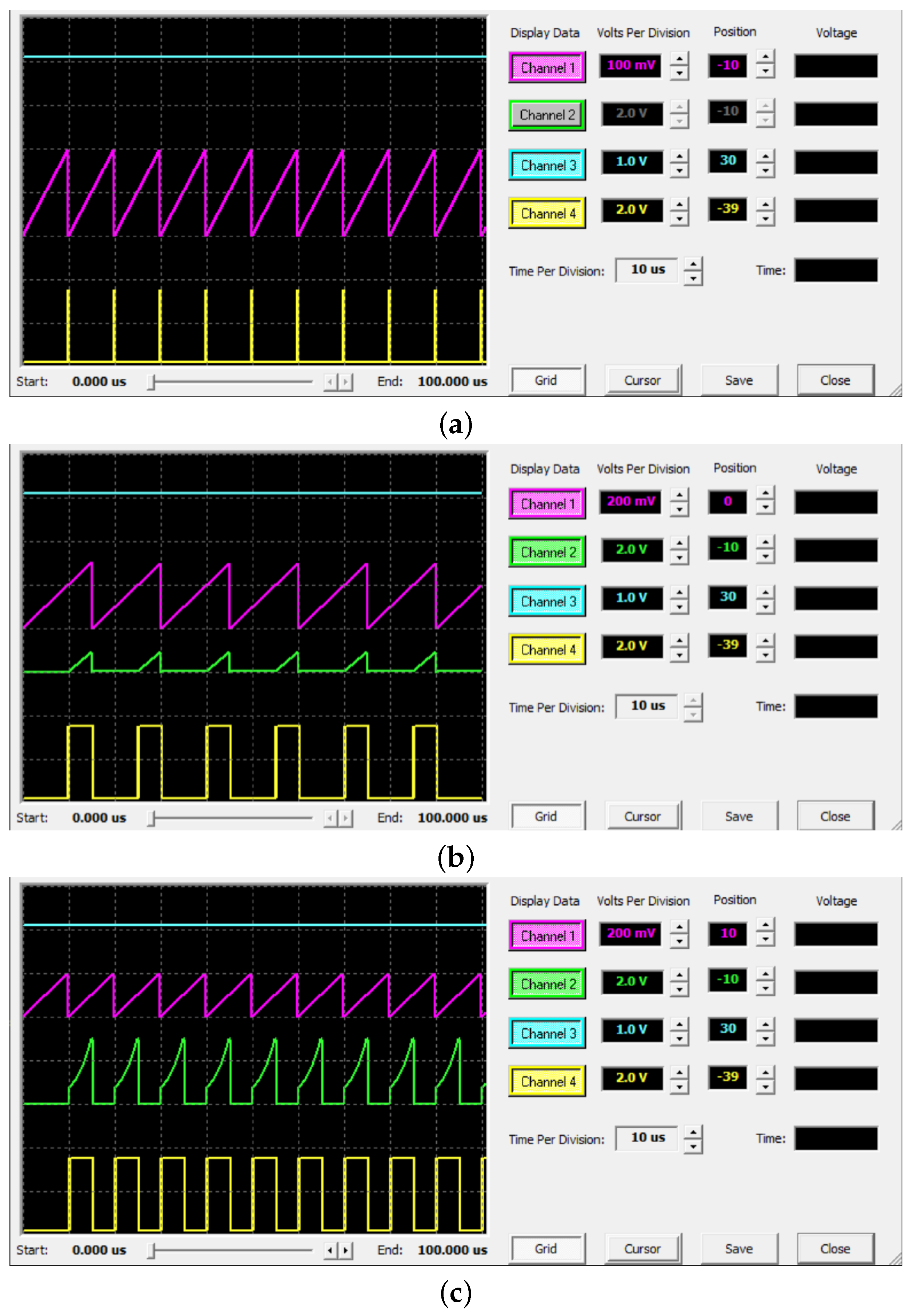
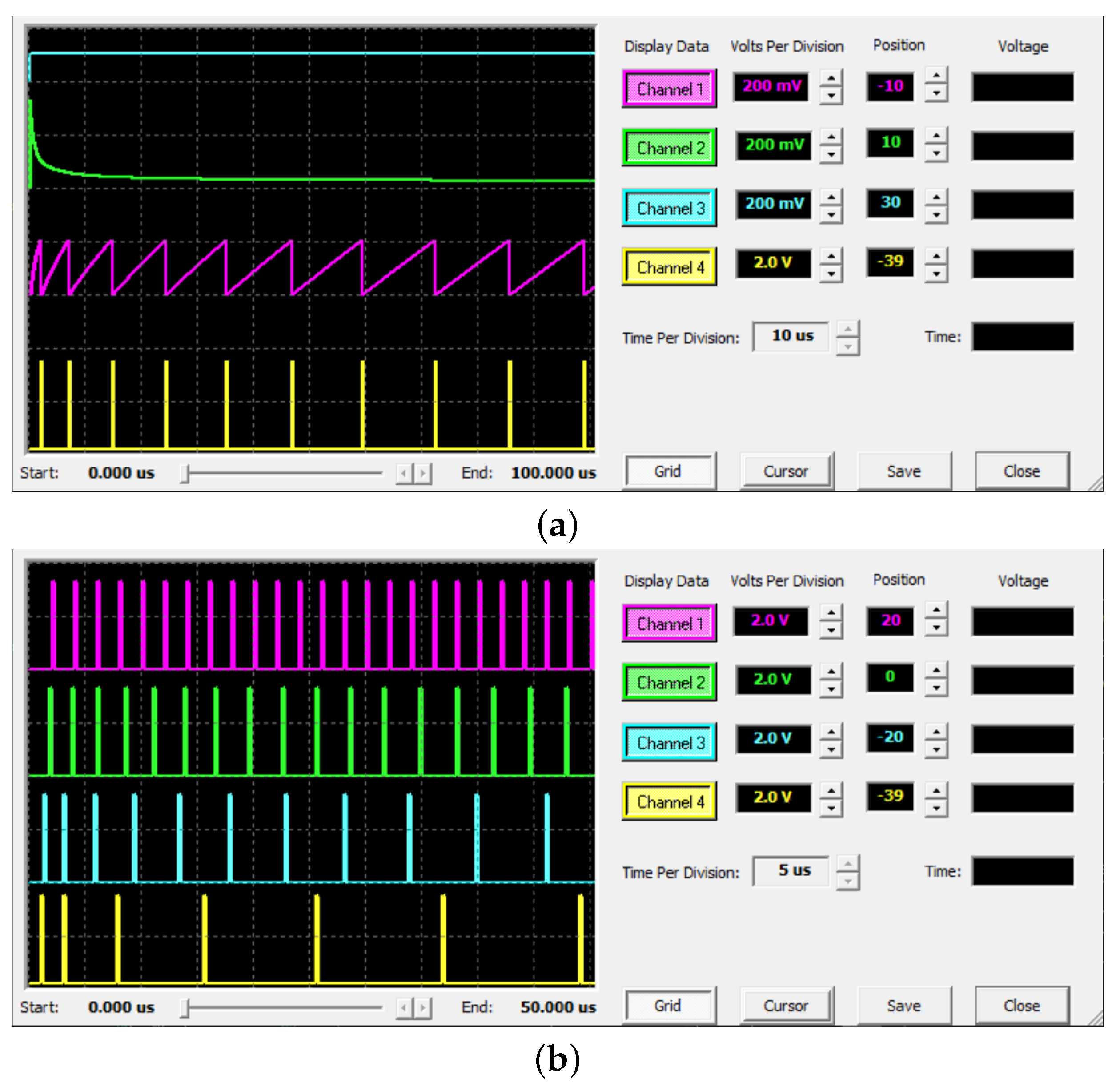
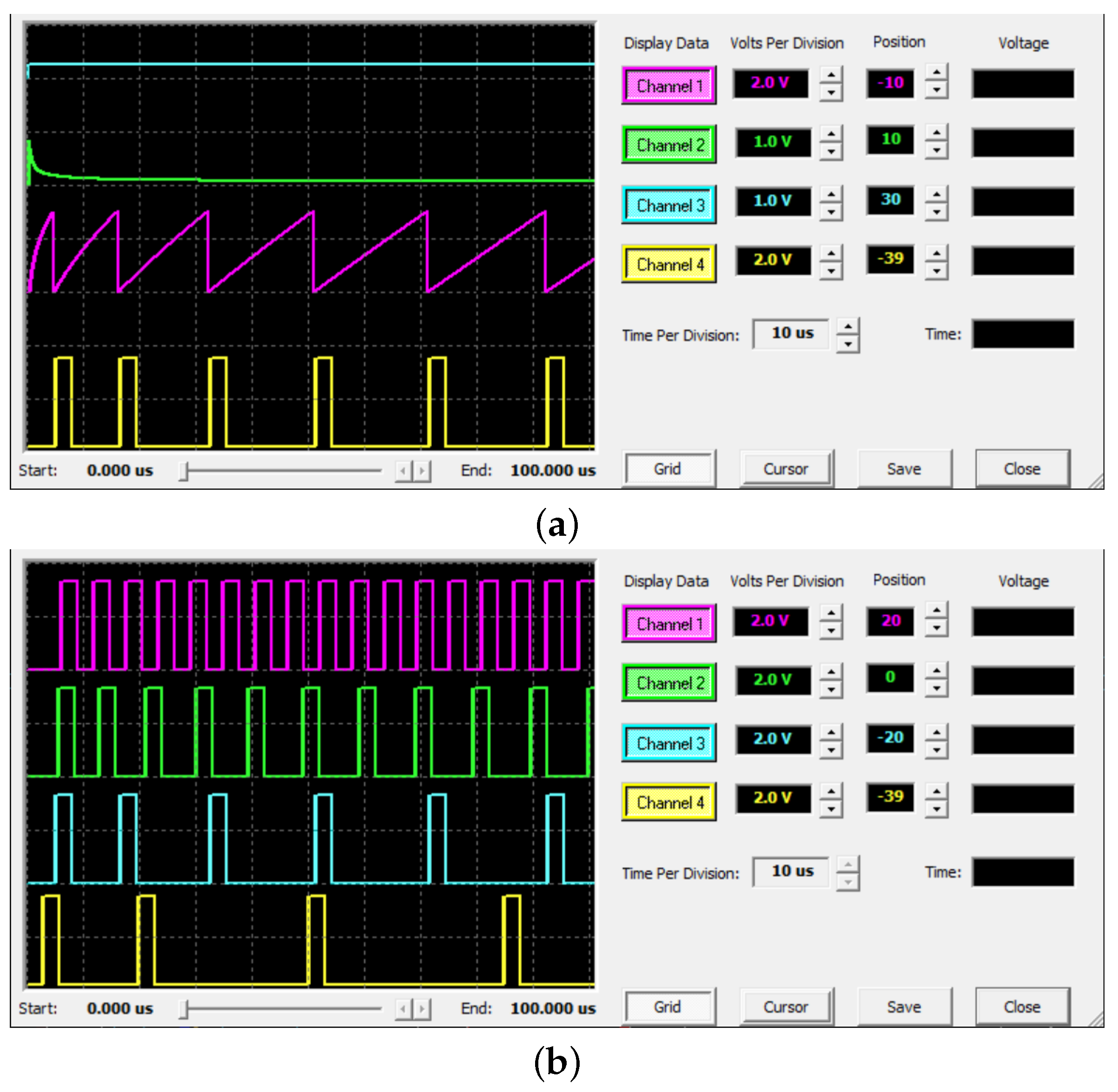
- Figure 17a shows the signals of the DP neuron, consisting of the input (CH3), the integrator output (CH1), and the pulse train output (CH4). In CH1, the integral starts at 0 and integrates the input up to the selected threshold (namely, 200 mV), causing a pulse to be fired, as seen in CH4. The integral is then reset and a new cycle begins. This behavior causes the integral to appear as a sawtooth wave, and a uniform firing pattern is observed at the output.
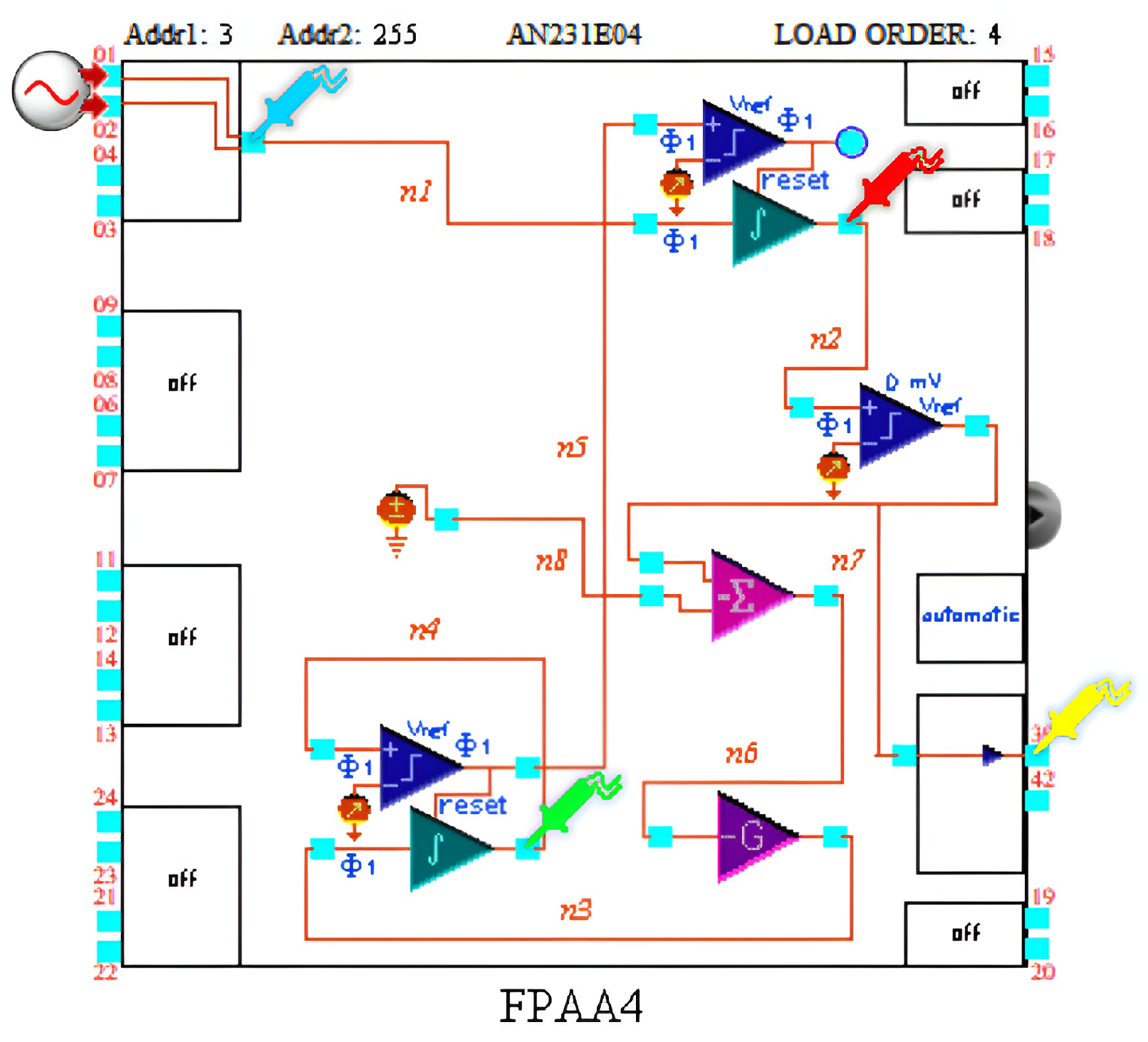
- Figure 17b corresponds to the A-H neuron. The plotted signals are the input (CH3), the integrator output (CH1), the integral in the high state (CH2), and the output pulses (CH4). The integral of the input differs from that of the DP neuron in that it reaches 200 mV and starts the second integration in CH2, but it is not reset. In fact, it is observed that the integral reaches almost 400 mV. The second integral that was initiated integrates at a constant rate until it reaches 0.9 V, the threshold chosen to obtain a pulse width of 5 µs. In CH4, the pulses coincide in time with the CH2 triangles. The obtained pulses have a width of 5 µs, as desired.
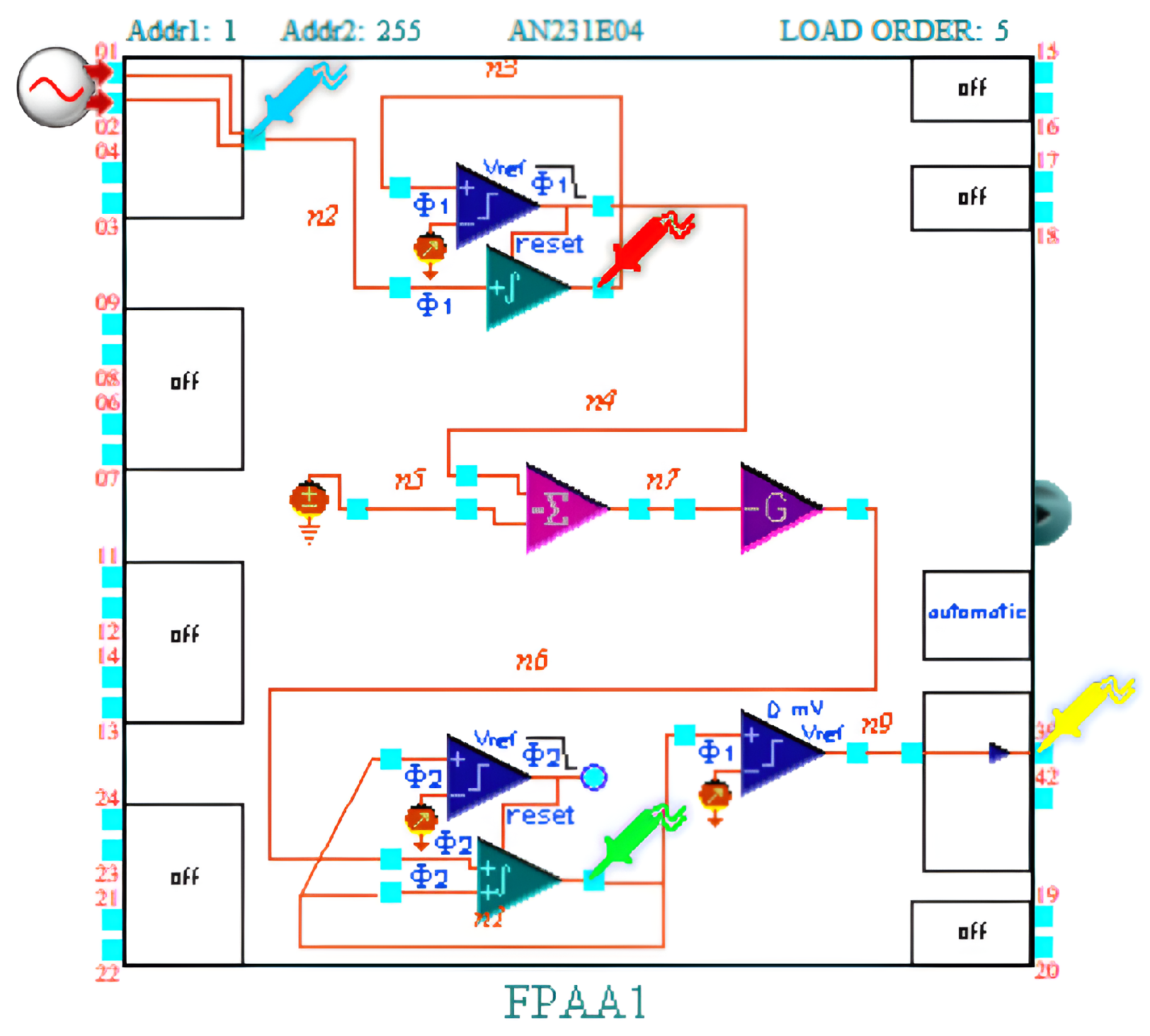
- Figure 17c illustrates the results for the TPFM neuron, namely the input (CH3), the integrator output (CH1), the positive feedback involving the second integral (CH2), and the output pulses (CH4). It is observed that the signal in CH2 behaves like that of the DP neuron by resetting the integral at 200 mV. In CH3, the positive feedback is initiated each time that CH1 reaches the threshold, with a shape reminiscent of a slice of an exponential as derived in (38). The output fires pulses of width 5 µs in CH4. The main difference between the A-H and TPFM neurons is observed at the output: although the pulse width is the same, the firing frequency is not. The TPFM preserves the firing frequency of the DP neuron when using the same ‘equivalent threshold’ and just adds more width to the pulse (causing the gain of the neuron to increase). However, the firing frequency of the A-H neuron decreases compared to the other two types because the integrator is ignored during the high state, resulting in delayed firing. The firing frequency does not depend linearly on the input amplitude, and, therefore, the A-H neuron does not modulate the input properly. As mentioned earlier, the differences are reduced for narrow pulses. Note that the duration of the first low state is longer than the successive ones caused by an initialization.
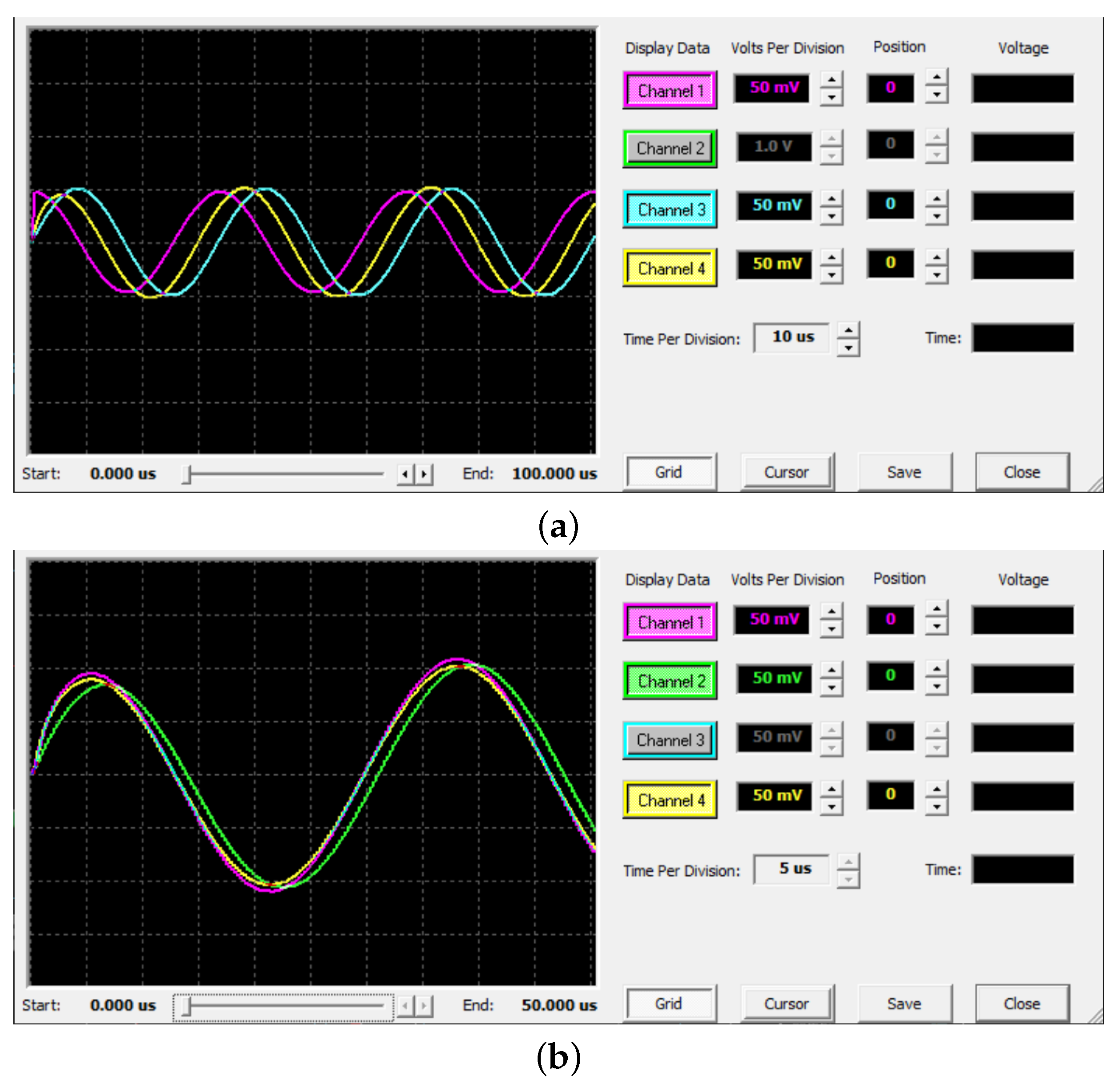
4.2. Fractional-Order Operator
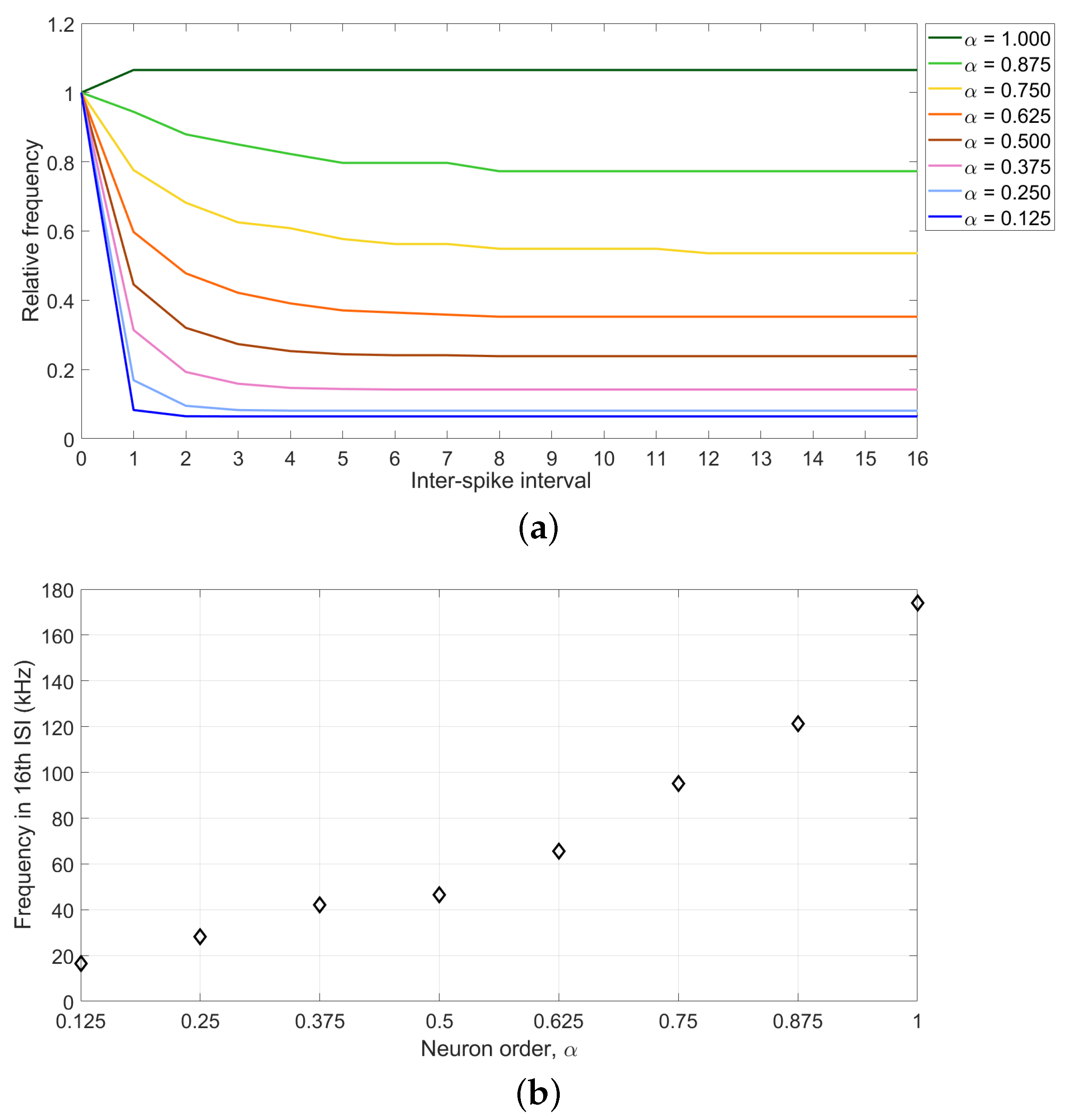
4.3. Fractional-Order Neurons
4.4. Discussion
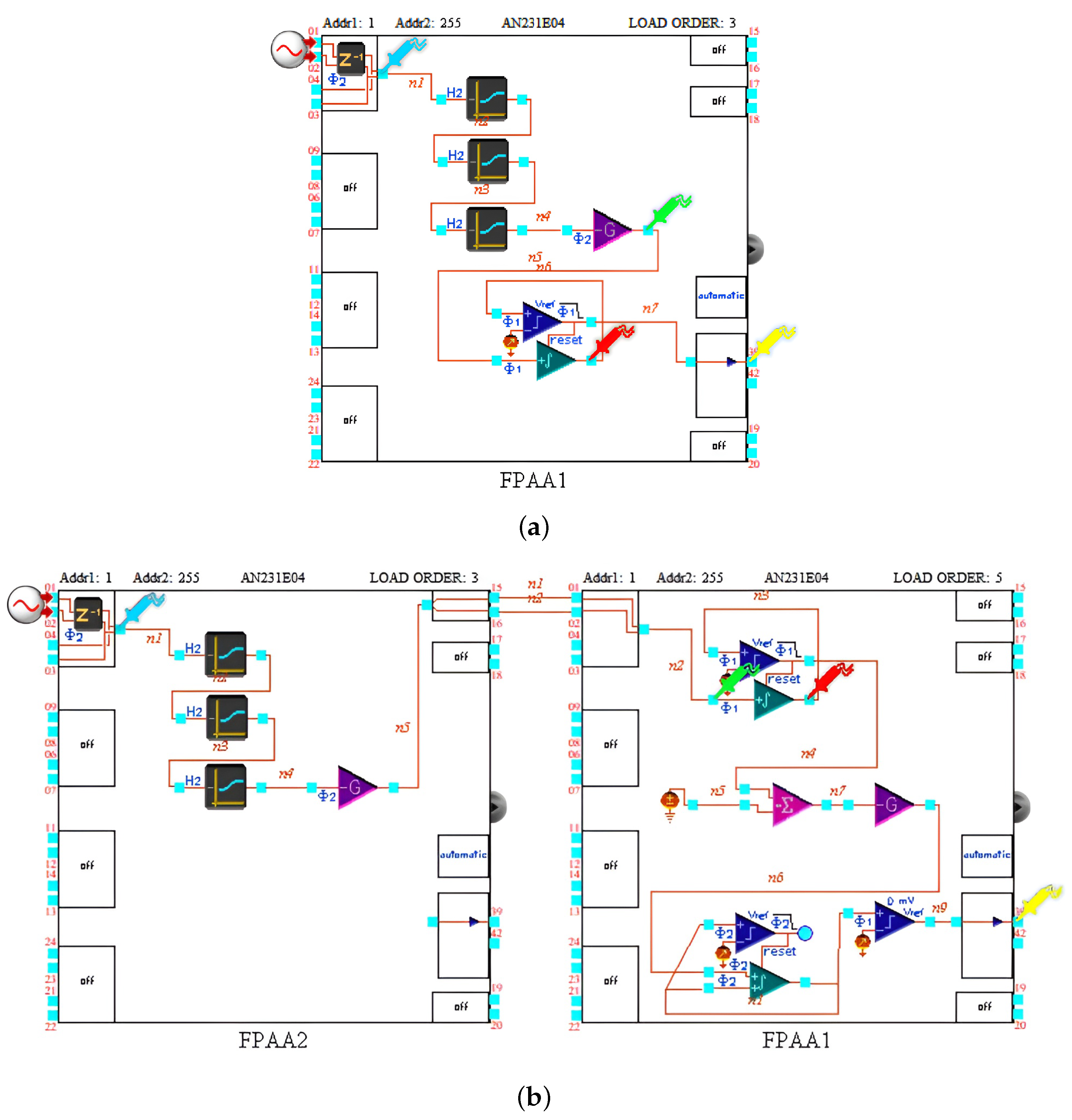
- Three types of integer-order I&F neurons have been implemented: the DP neuron, which fires impulse-like trains; the A-H neuron, which imitates one of the most popular neurons used in the literature, especially for control purposes, but is unable to perform appropriate modulation for large pulse widths; and a proposed neuron called TPFM, which preserves the ability to modulate signals even for large pulse widths, making it crucial in control applications. Unlike the A-H and TPFM neurons, the DP neuron lacks the ability to generate pulses of custom width, which is necessary for certain applications, such as those involving systems with significant static friction, which are the basis for NC. In terms of implementation, the DP neuron is highly compact, requiring only a single CAB and consuming only 40 mW of power. Implementations of the A-H and TPFM neurons were designed to fit into a single FPAA. In each case, three out of four CABs were used, and similar power consumption levels are expected (94 and 96 mW, respectively).
- Three types of FO operator implementations were tested to compare the quality of the approximation, hardware utilization, and power consumption. Two implementations, BFs in series and BFs in parallel, used BFs as zero-pole pair and low-pass filters, respectively. The third implementation used individual integrators. The use of BFs in series is the most compact solution for implementing FO derivatives, requiring at most blocks for an approximation of order N while providing similar performance to BFs in parallel. However, in some circumstances, that based on individual integrators is a more versatile option, allowing for a better approximation. For NC, BFs in series are more appropriate due to the limited resources in the FPAA.
- Two types of FO neurons were implemented based on integer-order neurons and FO derivatives connected at their inputs to search for behaviors inspired in real neurons. Specifically, the FO-DP and FO-TPFM neurons were created by combining the integer-order neurons, which can perform PFM, and the FO derivative using BFs in series. The results showed that both types of FO neurons are capable of adapting to inputs, i.e., evidenced the change in firing patterns observed when dealing with constant or periodic stimuli. The study evaluated two properties of adaptation based on theoretical analysis in the literature: (1) the increasing or decreasing spacing between spikes for a constant stimulus over time, and (2) the dependence of baseline frequency on FO. Here, an analog approach to obtain both properties simultaneously has been achieved, which was an open problem in the literature.
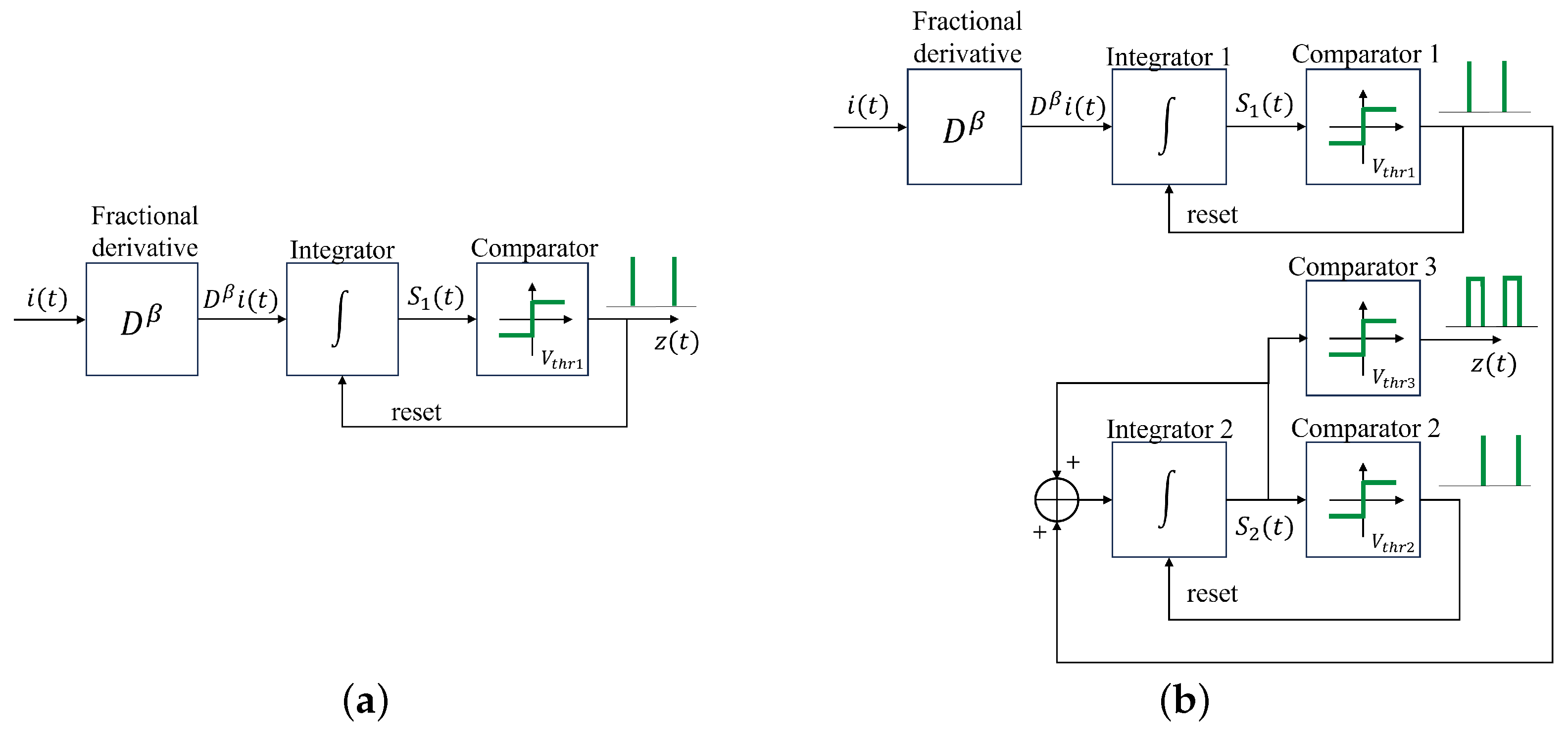
- In this work, the key to obtain the FO version of the neurons was not to replace the components of their associated circuit with their analogous FO but rather to use their equivalent block diagram (shown in Figure 8a and Figure 12a for the DP and TPFM cases, respectively), which can be related to blocks in the FPAA. Note that, as reported in [26], the generalization of a capacitor to FO (i.e., the use of a fractional impedance) causes the loss of the adaptation properties of the FO neuron. In the context of traditional analog circuits (non-programmable), the proposed block diagram could be implemented by using an op-amp-based FO differentiator connected to the input of the integer-order neuron.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| A-H | Axon-Hillock |
| BF | Bilinear filter |
| CAB | Configurable analog block |
| CAM | Configurable analog module |
| CH | AnadigmDesigner2 oscilloscope channel |
| DP | Dirac delta-pulsed |
| FO | Fractional order |
| FO-DP | Fractional-order Dirac delta-pulsed |
| FO-I&F | Fractional order integrate and fire |
| FO-TPFM | Fractional-order true-pulse-frequency modulation |
| FPGA | Field-programmable gate array |
| FPAA | Field-programmable analog array |
| I&F | Integrate and fire |
| I/O | Input/output |
| IPFM | Integral pulse-frequency modulation |
| ISI | Inter-spike interval |
| LUT | Look-up table |
| NC | Neuromorphic control |
| PFE | Partial fraction expansion |
| PFM | Pulse-frequency modulation |
| SRM | Spike response model |
| TPFM | True-pulse-frequency modulation |
| VMR | Mid-rail voltage |
Appendix A
Appendix B
References
- Mead, C. Neuromorphic electronic systems. Proc. IEEE 1990, 78, 1629–1636. [Google Scholar] [CrossRef]
- Mead, C. Analog VLSI and Neural Systems; Addison Wesley: Boston, MA, USA, 1989. [Google Scholar]
- Marković, D.; Mizrahi, A.; Querlioz, D.; Grollier, J. Physics for neuromorphic computing. Nat. Rev. Phys. 2020, 2, 499–510. [Google Scholar] [CrossRef]
- Jones, R.W.; Li, C.C.; Meyer, A.U.; Pinter, R.B. Pulse Modulation in Physiological Systems, Phenomenological Aspects. IRE Trans. Bio-Med. Electron. 1961, 8, 59–67. [Google Scholar] [CrossRef] [PubMed]
- Liou, W.R.; Yeh, M.L.; Kuo, Y.L. A High Efficiency Dual-Mode Buck Converter IC For Portable Applications. IEEE Trans. Power Electron. 2008, 23, 667–677. [Google Scholar] [CrossRef]
- DeWeerth, S.; Nielsen, L.; Mead, C.; Astrom, K. A simple neuron servo. IEEE Trans. Neural Netw. 1991, 2, 248–251. [Google Scholar] [CrossRef] [PubMed]
- Indiveri, G.; Linares-Barranco, B.; Hamilton, T.; van Schaik, A.; Etienne-Cummings, R.; Delbruck, T.; Liu, S.C.; Dudek, P.; Häfliger, P.; Renaud, S.; et al. Neuromorphic Silicon Neuron Circuits. Front. Neurosci. 2011, 5, 73. [Google Scholar] [CrossRef] [PubMed]
- Teka, W.; Marinov, T.M.; Santamaria, F. Neuronal Spike Timing Adaptation Described with a Fractional Leaky Integrate-and-Fire Model. PLoS Comput. Biol. 2014, 10, e1003526. [Google Scholar] [CrossRef] [PubMed]
- Angkeaw, K.; Pongyart, W.; Prommee, P. Design and Implementation of FPAA based LQR Controller for Magnetic Levitation Control System. In Proceedings of the 2019 42nd International Conference on Telecommunications and Signal Processing (TSP), Budapest, Hungary, 1–3 July 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar] [CrossRef]
- Silva-Juarez, A.; Tlelo-Cuautle, E.; de la Fraga, L.G. Chapter Eight - FPAA-based implementation of fractional-order multidirectional multiscroll chaotic oscillators. In Fractional Order Systems; Radwan, A.G., Khanday, F.A., Said, L.A., Eds.; Emerging Methodologies and Applications in Modelling; Academic Press: Cambridge, MA, USA, 2022; Volume 1, pp. 341–374. [Google Scholar] [CrossRef]
- Altun, K. FPAA Implementations of Fractional-Order Chaotic Systems. J. Circuits Syst. Comput. 2021, 30, 2150271. [Google Scholar] [CrossRef]
- Silva-Juárez, A.; Tlelo-Cuautle, E.; de la Fraga, L.G.; Li, R. FPAA-based implementation of fractional-order chaotic oscillators using first-order active filter blocks. J. Adv. Res. 2020, 25, 77–85. [Google Scholar] [CrossRef] [PubMed]
- Hassanein, A.M.; Madian, A.H.; Radwan, A.G.G.; Said, L.A. On the Design Flow of the Fractional-Order Analog Filters Between FPAA Implementation and Circuit Realization. IEEE Access 2023, 11, 29199–29214. [Google Scholar] [CrossRef]
- Kapoulea, S.; Psychalinos, C.; Elwakil, A.S. FPAA-Based Realization of Filters with Fractional Laplace Operators of Different Orders. Fractal Fract. 2021, 5, 218. [Google Scholar] [CrossRef]
- Singh, N.; Mehta, U.; Kothari, K.; Cirrincione, M. Optimized fractional low and highpass filters of (1+α) order on FPAA. Bull. Pol. Acad. Sci. Tech. Sci. 2020, 68, 635–644. [Google Scholar] [CrossRef]
- Emad, S.; Hassanein, A.M.; AbdelAty, A.M.; Madian, A.H.; Radwan, A.G.; Said, L.A. A Study on Fractional Power-Law Applications and Approximations. Electronics 2024, 13, 591. [Google Scholar] [CrossRef]
- Pagidas, A.; Psychalinos, C.; Elwakil, A.S. Field Programmable Analog Array Based Non-Integer Filter Designs. Electronics 2023, 12, 3427. [Google Scholar] [CrossRef]
- Khanday, F.A.; Kant, N.A.; Dar, M.R.; Zulkifli, T.Z.A.; Psychalinos, C. Low-Voltage Low-Power Integrable CMOS Circuit Implementation of Integer- and Fractional–Order FitzHugh–Nagumo Neuron Model. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 2108–2122. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Jones, R. Integral pulse frequency modulated control systems. IFAC Proc. Vol. 1963, 1, 186–195. [Google Scholar] [CrossRef]
- Abbott, L. Lapicque’s introduction of the integrate-and-fire model neuron (1907). Brain Res. Bull. 1999, 50, 303–304. [Google Scholar] [CrossRef] [PubMed]
- Valério, D.; Sá da Costa, J. An Introduction to Fractional Control; Institution of Engineering and Technology: Hong Kong, China, 2012. [Google Scholar] [CrossRef]
- Anadigm. AnadigmApex dpASP Family User Manual; Anadigm: Paso Robles, CA, USA, 2006. [Google Scholar]
- Caponetto, R.; Dongola, G.; Fortuna, L.; Petras, I. Fractional Order Systems: Modeling And Control Applications; World Scientific: Singapore, 2020. [Google Scholar] [CrossRef]
- Kapoulea, S.; Psychalinos, C.; Elwakil, A.S. Versatile Field-Programmable Analog Array Realizations of Power-Law Filters. Electronics 2022, 11, 692. [Google Scholar] [CrossRef]
- AbdelAty, A.; Fouda, M.; Eltawil, A. On numerical approximations of fractional-order spiking neuron models. Commun. Nonlinear Sci. Numer. Simul. 2022, 105, 106078. [Google Scholar] [CrossRef]
- Bertsias, P.; Psychalinos, C.; Elwakil, A.S. Fractional-Order Mihalas–Niebur Neuron Model Implementation Using Current-Mirrors. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; pp. 872–875. [Google Scholar] [CrossRef]
- Serrano-Balbontín, A.J.; Tejado, I.; Vinagre, B.M. Fractional Integrate-and-Fire Neuron: Analog Realization and Application to Neuromorphic Control. In Proceedings of the 2023 International Conference on Fractional Differentiation and Its Applications (ICFDA), Ajman, United Arab Emirates, 14–16 March 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Gerstner, W.; Kistler, W.M.; Naud, R.; Paninski, L. Neuronal Dynamics: From Single Neurons to Networks and Models of Cognition; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | DP Neuron | A-H Neuron | TPFM Neuron |
|---|---|---|---|
| Pulse width | Non-tunable | Tunable | Tunable |
| Firing frequency | Linear | Nonlinear | Linear |
| CAM needed | Integrator with comparator | Two Integrators with comparators Comparator Inverting Sum Stage DC Voltage Source Inverting Gain Stage | Integrator and Sum Integrator with comparators Comparator Inverting Sum Stage DC Voltage Source Inverting Gain Stage |
| Power consumption (software estimation) | 40 mW | 94 mW | 96 mW |
| BFs in Series | BFs in Parallel | Individual Integrators | |
|---|---|---|---|
| Approximation | kHz | Hz | |
| () | kHz | kHz | |
| Implementation | kHz | kHz | µs−1 |
| kHz | kHz | µs−1 | |
| kHz | kHz | µs−1 | |
| kHz | µs−1 | ||
| kHz | µs−1 | ||
| kHz | µs−1 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Serrano-Balbontín, A.J.; Tejado, I.; Vinagre, B.M. Field-Programmable Analog Array Implementation of Neuromorphic Silicon Neurons with Fractional Dynamics. Fractal Fract. 2024, 8, 226. https://doi.org/10.3390/fractalfract8040226
Serrano-Balbontín AJ, Tejado I, Vinagre BM. Field-Programmable Analog Array Implementation of Neuromorphic Silicon Neurons with Fractional Dynamics. Fractal and Fractional. 2024; 8(4):226. https://doi.org/10.3390/fractalfract8040226
Chicago/Turabian StyleSerrano-Balbontín, Andrés J., Inés Tejado, and Blas M. Vinagre. 2024. "Field-Programmable Analog Array Implementation of Neuromorphic Silicon Neurons with Fractional Dynamics" Fractal and Fractional 8, no. 4: 226. https://doi.org/10.3390/fractalfract8040226
APA StyleSerrano-Balbontín, A. J., Tejado, I., & Vinagre, B. M. (2024). Field-Programmable Analog Array Implementation of Neuromorphic Silicon Neurons with Fractional Dynamics. Fractal and Fractional, 8(4), 226. https://doi.org/10.3390/fractalfract8040226