


Prediction of Noise Levels According to Some Exploitation Parameters of an Agricultural Tractor: A Machine Learning Approach






Abstract
:1. Introduction
- exposure limit value: L(EX,8 h) = 87 dB(A) and p(peak) = 200 Pa (140 dB(C) relative to the reference sound pressure of 20 μPa);
- upper exposure warning limit: L(EX,8 h) = 85 dB(A) and p(peak) = 140 Pa (137 dB(C) relative to the reference sound pressure of 20 μPa);
- lower exposure warning limit: L(EX,8 h) = 80 dB(A) and p(peak) = 112 Pa (135 dB(C) relative to the reference sound pressure of 20 μPa).
2. Materials and Methods
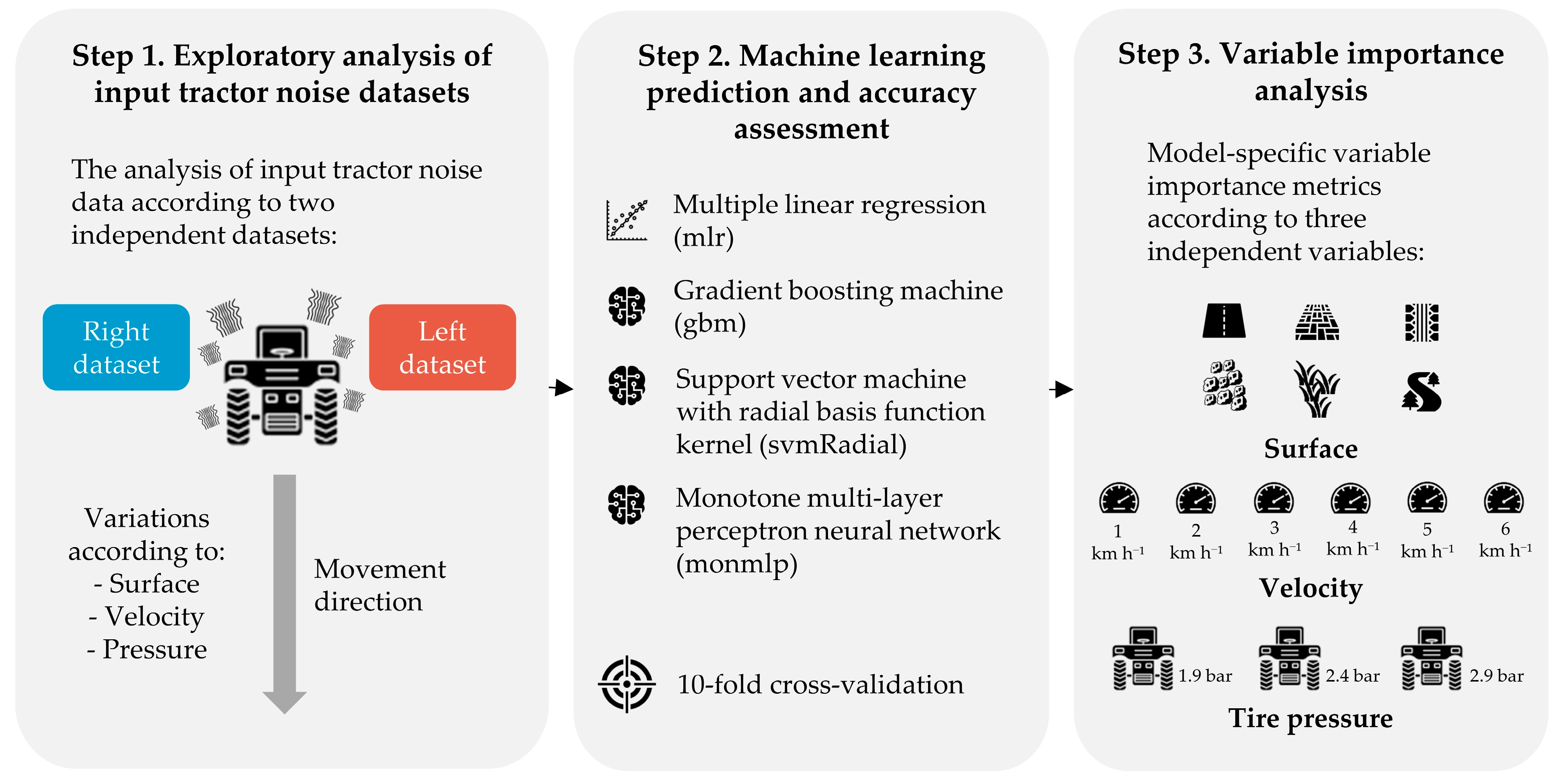
2.1. Exploitation Research
2.2. Machine Learning Prediction and Accuracy Assessment
3. Results and Discussion
4. Conclusions
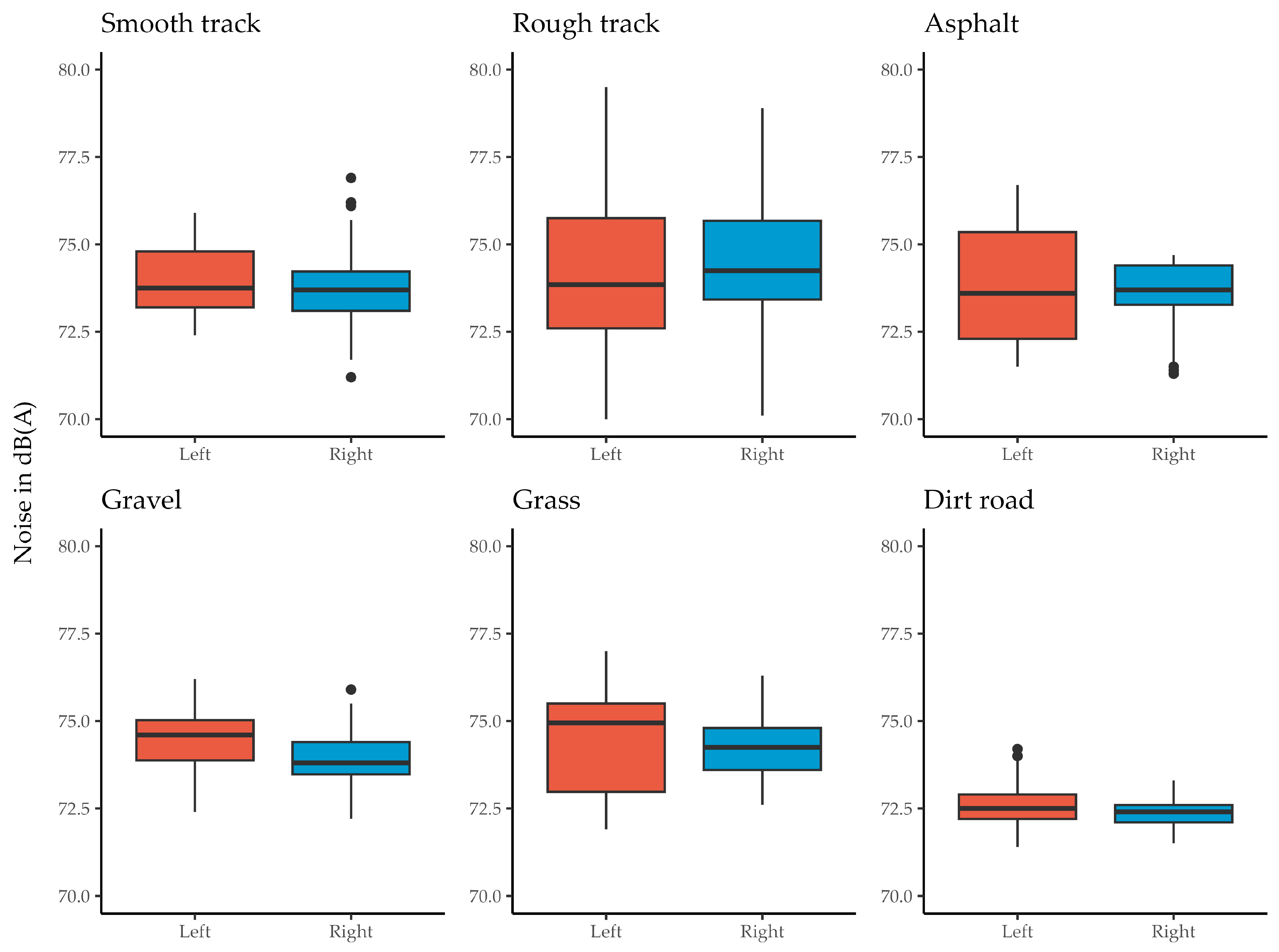
- From the diagrams of left and right input noise datasets according to the type of surface, it was found that the median and interquartile range are higher for all measurement surfaces on the left side compared to the right side (with the exception of the median on asphalt and rough track where it was higher on the right).
- Superiority of all machine learning methods over conventional multiple regression was determined for all surfaces, considering each surface individually and collectively.
- Observing the input dataset of noise on the left side, it was found that the machine learning method, monmlp, is the best for each surface individually, while the gbm method is the best for all surfaces in both cases (left and right).
- A slightly lower accuracy was observed from the dataset of noise on the right side, overall for all surfaces, compared to the data on the left side.
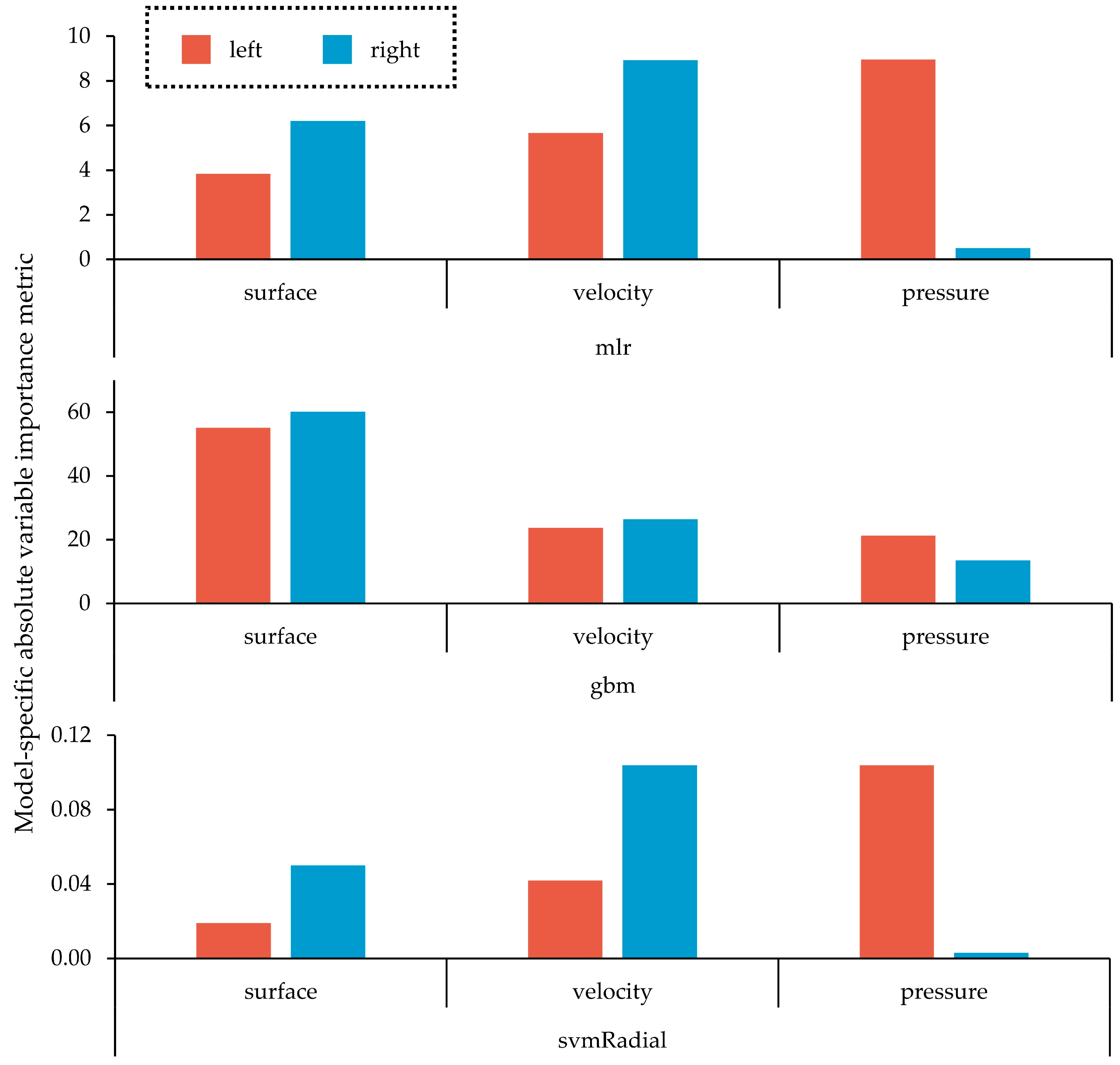
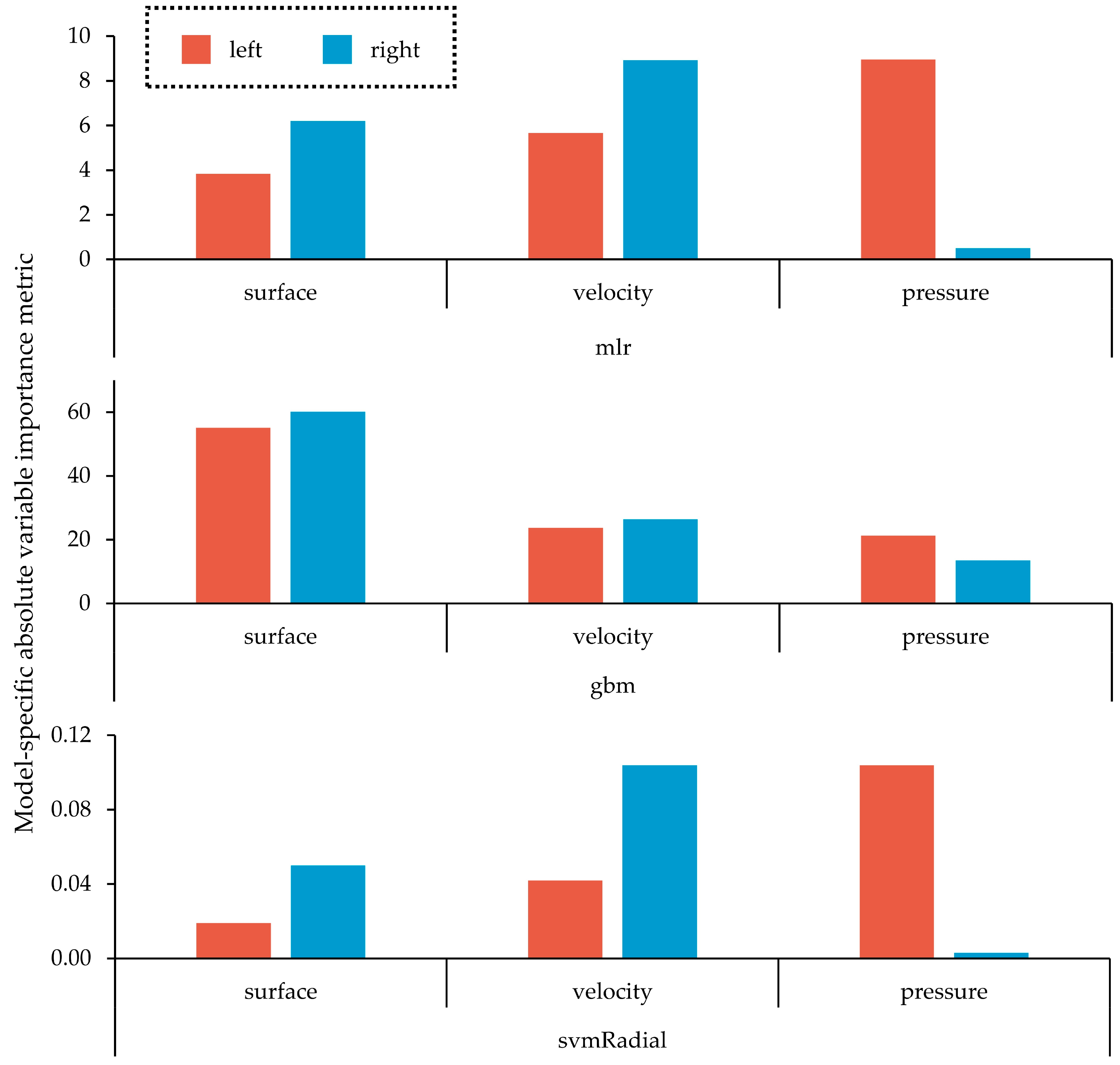
- From the changing importance metrics for left and right input datasets of noise, for the most accurate method for overall datasets (gbm), it was found that the surface has the highest influence on noise, while for all three methods, surface and speed are more important for the right side than the left, whereas for tire pressure, it is the opposite.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chandrappa, R.; Das, D.B. Noise Pollution. In Environmental Health—Theory and Practice: Volume 2: Coping with Environmental Health; Chandrappa, R., Das, D.B., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 141–148. ISBN 978-3-030-64484-0. [Google Scholar]
- Liu, F.; Jiang, S.; Kang, J.; Wu, Y.; Yang, D.; Meng, Q.; Wang, C. On the Definition of Noise. Humanit. Soc. Sci. Commun. 2022, 9, 406. [Google Scholar] [CrossRef] [PubMed]
- Ding, T.; Yan, A.; Liu, K. What Is Noise-Induced Hearing Loss? Br. J. Hosp. Med. 2019, 80, 525–529. [Google Scholar] [CrossRef] [PubMed]
- Araújo Alves, J.; Neto Paiva, F.; Torres Silva, L.; Remoaldo, P. Low-Frequency Noise and Its Main Effects on Human Health—A Review of the Literature between 2016 and 2019. Appl. Sci. 2020, 10, 5205. [Google Scholar] [CrossRef]
- Sabanci, A. Ergonomi. Baki Kitapevi, Yayın No: 13. Adana 1999, 7, 343–357. [Google Scholar]
- Brkić, D.; Vujčić, M.; Šumanovac, L.; Lukač, P.; Kiš, D.; Jurić, T.; Knežević, D. Eksploatacija Poljoprivrednih Strojeva; Poljoprivredni fakultet u Osijeku: Osijek, Croatia, 2005. [Google Scholar]
- EBSCOhost|154991873|Noise and Vibrations Produced by Tractors and Selfpropelled Agricultural Machinery. Available online: https://eds.p.ebscohost.com/abstract?site=eds&scope=site&jrnl=20661843&AN=154991873&h=7bovulthTg4ezud5BW7lnSQzpDxvHAOdzaa%2fDXe0y9SOWfGs7e63j4W8tlmATf2imtlvUSbfpe%2fQIvSDi4XqNg%3d%3d&crl=c&resultLocal=ErrCrlNoResults&resultNs=Ehost&crlhashurl=login.aspx%3fdirect%3dtrue%26profile%3dehost%26scope%3dsite%26authtype%3dcrawler%26jrnl%3d20661843%26AN%3d154991873 (accessed on 27 February 2024).
- Durczak, K.; Rybacki, P. Noise Emission in the Cabs of Modern Farm Tractors. Teh. Vjesn. 2023, 30, 669–675. [Google Scholar] [CrossRef]
- Scarlett, A.J.; Price, J.S.; Stayner, R.M. Whole-Body Vibration: Evaluation of Emission and Exposure Levels Arising from Agricultural Tractors. J. Terramechanics 2007, 44, 65–73. [Google Scholar] [CrossRef]
- HRN4You Agricultural Wheeled Tractors and Field Machinery—Measurement of Whole-Body Vibration of the Operator (ISO 5008:2002+Cor 1:2005). Available online: https://repozitorij.hzn.hr/norm/HRN+ISO+5008%3A2015 (accessed on 27 February 2024).
- Sirin, O. State-of-the-Art Review on Sustainable Design and Construction of Quieter Pavements—Part 2: Factors Affecting Tire-Pavement Noise and Prediction Models. Sustainability 2016, 8, 692. [Google Scholar] [CrossRef]
- Xiong, J. Study on Optimization of Vehicle Exhaust System Noise and Hook Position Based on Multi-Source Experimental Data Analysis. SN Appl. Sci. 2023, 5, 57. [Google Scholar] [CrossRef]
- Flor, D.; Pena, D.; Pena, L.; de Sousa, V.A.; Martins, A. Characterization of Noise Level Inside a Vehicle under Different Conditions. Sensors 2020, 20, 2471. [Google Scholar] [CrossRef]
- The Rule on the Protection of Workers from Exposure to Noise at Work. Available online: https://narodne-novine.nn.hr/clanci/sluzbeni/2008_04_46_1577.html (accessed on 27 February 2024).
- Butkus, R.; Liegus, M.; Vasiliauskas, G. Tendencies of noise levels in cabs of agricultural tractors. In Proceedings of the 7th International Scientific Conference Rural Development, Kaunas, Lithuania, 19–20 November 2015. [Google Scholar]
- Mofrad, F.E.; Lar, M.B.; Kohan, A. Reduce Noise in the Cab of the Tractor MF399 Sugar Transport Operation. Adv. Environ. Biol. 2014, 8, 3035–3038. [Google Scholar]
- Barač, Ž.; Plaščak, I.; Jurić, T.; Jurišić, M.; Zimmer, D.; Čuković, I. The influence of various agrotechnical surfaces on the noise generated from agricultural tractor in exploatation. In Proceedings of the 9th International Scientific/Professional Conference “Agriculture in Nature and Environment Protection”, Vukovar, Republic of Croatia, 6–8 June 2016; pp. 78–81. [Google Scholar]
- Barač, Ž.; Plaščak, I.; Jurić, T.; Jurišić, M. The influence of tractor exploitation time on the generated noise level. Teh. Vjesn. 2016, 23, 1505–1510. [Google Scholar] [CrossRef]
- Barač, Ž.; Plaščak, I.; Jurišić, M.; Tadić, V.; Zimmer, D.; Duvnjak, V. Noise in the Cabin of Agricultural Tractors. Teh. Vjesn. 2018, 25, 1611–1615. [Google Scholar] [CrossRef]
- De Souza, C.M.A.; Junior, G.M.; da Silva, R.R.; Rafull, L.Z.L.; Orlando, R.C.; Ale, L.P. Occupational Noise Level Exposures Outside and inside Agricultural Tractor Cabs. Obs. De La Econ. Latinoam. 2023, 21, 4968–4987. [Google Scholar] [CrossRef]
- Picu, M. Risk to the Health of Agricultural Equipment Drivers in Romania Caused by Exposure to Vibration and Noise. Analele Universității ”Dunărea de Jos” din Galați. Fascicula II, Matematică, fizică, mecanică teoretică/Annals of the “Dunarea de Jos” University of Galati. Fascicle II Math. Phys. Theor. Mech. 2021, 44, 103–110. [Google Scholar] [CrossRef]
- Poje, A.; Potočnik, I.; Danilović, M.; Antonić, S.; Poje, A.; Potočnik, I.; Danilović, M.; Antonić, S. A Case Study of the Impact of Skidding Distance on Tractor Operator Exposure to Noise. Balt. For. 2016, 22, 357–364. [Google Scholar]
- Son, H.; Lim, J.W.; Park, S.; Park, B.; Han, J.; Kim, H.B.; Lee, M.C.; Jang, K.-J.; Kim, G.; Chung, J.H. A Machine Learning Approach for the Classification of Falls and Activities of Daily Living in Agricultural Workers. IEEE Access 2022, 10, 77418–77431. [Google Scholar] [CrossRef]
- Nath, N.D.; Chaspari, T.; Behzadan, A.H. Automated Ergonomic Risk Monitoring Using Body-Mounted Sensors and Machine Learning. Adv. Eng. Inform. 2018, 38, 514–526. [Google Scholar] [CrossRef]
- HRN4You Electroacoustics—Sound Level Meters—Part 1: Specifications (ISO 61672-1:2013). Available online: https://repozitorij.hzn.hr/norm/HRN+EN+61672-1%3A2014 (accessed on 27 February 2024).
- HRN4You Earth-Moving Machinery—Determination of Emission Sound Pressure Level at Operator’s Position—Dynamic Test Conditions (ISO 6396:2008+Cor 1:2009). Available online: https://repozitorij.hzn.hr/norm/HRN+ISO+6396%3A2018 (accessed on 27 February 2024).
- HRN4You Tractors for Agriculture and Forestry—Measurement of Noise at the Operator’s Position—Survey Method (ISO 5131:2015). Available online: https://repozitorij.hzn.hr/norm/HRN+ISO+5131%3A2018 (accessed on 27 February 2024).
- Hota, S.; Tewari, V.K.; Chandel, A.K. Workload Assessment of Tractor Operations with Ergonomic Transducers and Machine Learning Techniques. Sensors 2023, 23, 1408. [Google Scholar] [CrossRef]
- Singh, A.; Nawayseh, N.; Singh, H.; Dhabi, Y.K.; Samuel, S. Internet of Agriculture: Analyzing and Predicting Tractor Ride Comfort through Supervised Machine Learning. Eng. Appl. Artif. Intell. 2023, 125, 106720. [Google Scholar] [CrossRef]
- Saleem, M.H.; Potgieter, J.; Arif, K.M. Automation in Agriculture by Machine and Deep Learning Techniques: A Review of Recent Developments. Precis. Agric. 2021, 22, 2053–2091. [Google Scholar] [CrossRef]
- Varga, I.; Radočaj, D.; Jurišić, M.; Markulj Kulundžić, A.; Antunović, M. Prediction of Sugar Beet Yield and Quality Parameters with Varying Nitrogen Fertilization Using Ensemble Decision Trees and Artificial Neural Networks. Comput. Electron. Agric. 2023, 212, 108076. [Google Scholar] [CrossRef]
- Konstantinov, A.V.; Utkin, L.V. Interpretable Machine Learning with an Ensemble of Gradient Boosting Machines. Knowl. -Based Syst. 2021, 222, 106993. [Google Scholar] [CrossRef]
- Ayyadevara, V.K. Gradient Boosting Machine. In Pro Machine Learning Algorithms: A Hands-On Approach to Implementing Algorithms in Python and R; Ayyadevara, V.K., Ed.; Apress: Berkeley, CA, USA, 2018; pp. 117–134. ISBN 978-1-4842-3564-5. [Google Scholar]
- Scholkopf, B.; Smola, A.J. Learning with Kernels: Support Vector Machines, Regularization, Optimization, and Beyond; MIT Press: Cambridge, MA, USA, 2018; ISBN 978-0-262-53657-8. [Google Scholar]
- Müller, K.R.; Mika, S.; Tsuda, K.; Schölkopf, K. An Introduction to Kernel-Based Learning Algorithms. In Handbook of Neural Network Signal Processing; CRC Press: Boca Raton, FL, USA, 2002; ISBN 978-1-315-22041-3. [Google Scholar]
- Eskandarian, S.; Bahrami, P.; Kazemi, P. A Comprehensive Data Mining Approach to Estimate the Rate of Penetration: Application of Neural Network, Rule Based Models and Feature Ranking. J. Pet. Sci. Eng. 2017, 156, 605–615. [Google Scholar] [CrossRef]
- Kamala, J.; Nawaz, G.M.K. Secure Communication Using Multi-Layer Perceptron Neural Network and the Adaptive-Network-Based Fuzzy Inference System in Wireless Network. SN Comput. Sci. 2023, 4, 732. [Google Scholar] [CrossRef]
- Bonaccorso, G. Machine Learning Algorithms; Packt Publishing Ltd.: Birmingham, UK, 2017; ISBN 978-1-78588-451-1. [Google Scholar]
- Chicco, D.; Warrens, M.J.; Jurman, G. The Coefficient of Determination R-Squared Is More Informative than SMAPE, MAE, MAPE, MSE and RMSE in Regression Analysis Evaluation. PeerJ Comput. Sci. 2021, 7, e623. [Google Scholar] [CrossRef] [PubMed]
- Lashgari, M.; Maleki, A. Evaluation of Lawn Tractor Noise Using Acoustic and Psychoacoustic Descriptors. Eng. Agric. Environ. Food 2016, 9, 116–122. [Google Scholar] [CrossRef]
- Aiello, G.; Catania, P.; Vallone, M.; Venticinque, M. Worker Safety in Agriculture 4.0: A New Approach for Mapping Operator’s Vibration Risk through Machine Learning Activity Recognition. Comput. Electron. Agric. 2022, 193, 106637. [Google Scholar] [CrossRef]
- Irumva, T.; Mwunguzi, H.; Pitla, S.K.; Lowndes, B.; Yoder, A.M.; Siu, K.C. Agricultural Machinery Operator Monitoring System (Ag-OMS): A Machine Learning Approach for Real-Time Operator Safety Assessment. Assessment. J. Agric. Saf. Health 2023, 29, 85–97. [Google Scholar] [CrossRef]
- Upadhyay, R.; Senapati, A.; Bhattacherjee, A.; Patra, A.; Chatterjee, S. A Comparison of Multiple Machine Learning Algorithms to Predict Whole-Body Vibration Exposure of Dumper Operators in Iron Ore Mines in India. Int. J. Stat. Med. Res. 2021, 10, 169–182. [Google Scholar] [CrossRef]
- Melemez, K.; Tunay, M. The Investigation of the Ergonomic Aspects of the Noise Caused by Agricultural Tractors Used in Turkish Forestry. Afr. J. Agric. Res. 2010, 5, 243–249. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Hyperparameter | Tuned Value |
|---|---|---|
| gbm | n.trees | 150 |
| interaction depth | 3 | |
| shrinkage | 0.1 | |
| n.minobsinnode | 10 | |
| svmRadial | sigma | 0.34 |
| C | 1 | |
| monmlp | hidden1 | 5 |
| n.ensemble | 1 |
| Dataset | N | Median | Minimum | Maximum | SD | CV (%) | Skewness | Kurtosis |
|---|---|---|---|---|---|---|---|---|
| left | 648 | 73.8 | 69.5 | 79.5 | 1.665 | 2.25% | 0.446 | 0.919 |
| right | 648 | 73.7 | 67.6 | 78.9 | 1.332 | 1.81% | 0.281 | 2.872 |
| Method | Metric | Surface Type | All Surfaces | |||||
|---|---|---|---|---|---|---|---|---|
| Smooth Track | Rough Track | Asphalt | Gravel | Grass | Dirt Road | |||
| mlr | R² | 0.064 | 0.624 | 0.210 | 0.684 | 0.537 | 0.651 | 0.163 |
| RMSE(dB(A)) | 0.954 | 1.791 | 1.387 | 0.550 | 0.947 | 0.392 | 1.526 | |
| MAE(dB(A)) | 0.829 | 1.471 | 1.182 | 0.459 | 0.783 | 0.302 | 1.223 | |
| gbm | R² | 0.346 | 0.943 | 0.921 | 0.859 | 0.913 | 0.747 | 0.820 |
| RMSE(dB(A)) | 0.784 | 0.692 | 0.427 | 0.350 | 0.403 | 0.322 | 0.709 | |
| MAE(dB(A)) | 0.619 | 0.522 | 0.316 | 0.283 | 0.306 | 0.259 | 0.534 | |
| svmRadial | R² | 0.241 | 0.932 | 0.936 | 0.892 | 0.918 | 0.758 | 0.598 |
| RMSE(dB(A)) | 0.848 | 0.767 | 0.417 | 0.316 | 0.402 | 0.326 | 1.073 | |
| MAE(dB(A)) | 0.632 | 0.579 | 0.314 | 0.255 | 0.320 | 0.262 | 0.709 | |
| monmlp | R² | 0.515 | 0.949 | 0.955 | 0.878 | 0.929 | 0.771 | 0.776 |
| RMSE(dB(A)) | 0.704 | 0.640 | 0.360 | 0.311 | 0.372 | 0.302 | 0.785 | |
| MAE(dB(A)) | 0.488 | 0.455 | 0.286 | 0.263 | 0.300 | 0.225 | 0.597 | |
| Method | Metric | Surface Type | All Surfaces | |||||
|---|---|---|---|---|---|---|---|---|
| Smooth Track | Rough Track | Asphalt | Gravel | Grass | Dirt Road | |||
| mlr | R² | 0.339 | 0.729 | 0.293 | 0.276 | 0.738 | 0.059 | 0.166 |
| RMSE(dB(A)) | 1.208 | 1.058 | 0.759 | 0.663 | 0.401 | 0.374 | 1.226 | |
| MAE(dB(A)) | 0.854 | 0.796 | 0.619 | 0.521 | 0.324 | 0.309 | 0.929 | |
| gbm | R² | 0.488 | 0.862 | 0.925 | 0.705 | 0.850 | 0.669 | 0.724 |
| RMSE(dB(A)) | 1.014 | 0.713 | 0.267 | 0.434 | 0.344 | 0.238 | 0.696 | |
| MAE(dB(A)) | 0.710 | 0.529 | 0.199 | 0.336 | 0.284 | 0.184 | 0.470 | |
| svmRadial | R² | 0.548 | 0.839 | 0.952 | 0.669 | 0.795 | 0.729 | 0.507 |
| RMSE(dB(A)) | 0.969 | 0.800 | 0.209 | 0.464 | 0.361 | 0.206 | 0.958 | |
| MAE(dB(A)) | 0.644 | 0.515 | 0.147 | 0.364 | 0.294 | 0.167 | 0.608 | |
| monmlp | R² | 0.555 | 0.870 | 0.955 | 0.717 | 0.813 | 0.747 | 0.632 |
| RMSE(dB(A)) | 0.997 | 0.697 | 0.180 | 0.433 | 0.346 | 0.193 | 0.807 | |
| MAE(dB(A)) | 0.654 | 0.458 | 0.139 | 0.341 | 0.280 | 0.157 | 0.566 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barač, Ž.; Radočaj, D.; Plaščak, I.; Jurišić, M.; Marković, M. Prediction of Noise Levels According to Some Exploitation Parameters of an Agricultural Tractor: A Machine Learning Approach. AgriEngineering 2024, 6, 995-1007. https://doi.org/10.3390/agriengineering6020057
Barač Ž, Radočaj D, Plaščak I, Jurišić M, Marković M. Prediction of Noise Levels According to Some Exploitation Parameters of an Agricultural Tractor: A Machine Learning Approach. AgriEngineering. 2024; 6(2):995-1007. https://doi.org/10.3390/agriengineering6020057
Chicago/Turabian StyleBarač, Željko, Dorijan Radočaj, Ivan Plaščak, Mladen Jurišić, and Monika Marković. 2024. "Prediction of Noise Levels According to Some Exploitation Parameters of an Agricultural Tractor: A Machine Learning Approach" AgriEngineering 6, no. 2: 995-1007. https://doi.org/10.3390/agriengineering6020057