Proprioceptive Sensors’ Fault Tolerant Control Strategy for an Autonomous Vehicle



Abstract
:1. Introduction
2. Materials and Methods
- The road is assumed to be a plane (no slope, no inclination);
- The lateral dynamics is not considered;
- Yaw, pitch and roll dynamics are neglected.
- ( or ) and ( or );
- .
2.1. Static Output Feedback Controller Design
| Algorithm 1 The cross-decomposition algorithm. |
|
2.2. Proportional and Integral Observer Design
- The estimated state error e is defined as ;
- The estimated fault error is defined as ;
- The free fault case (), residual signal r, is defined as (where is a weighting matrix to be designed).
2.3. Descriptor Observer Design
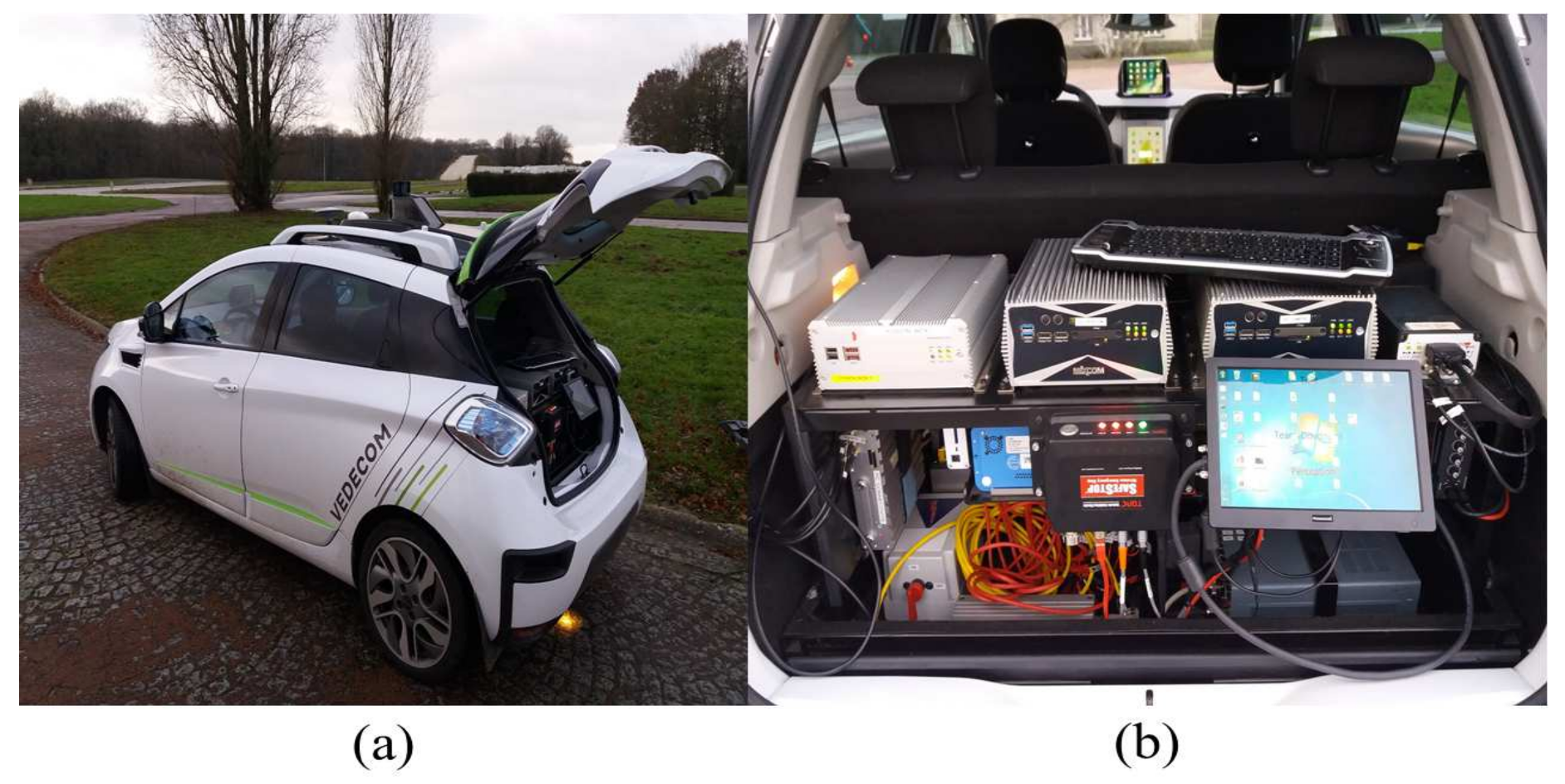
3. Experimental Bench
4. Experimental Results and Discussions
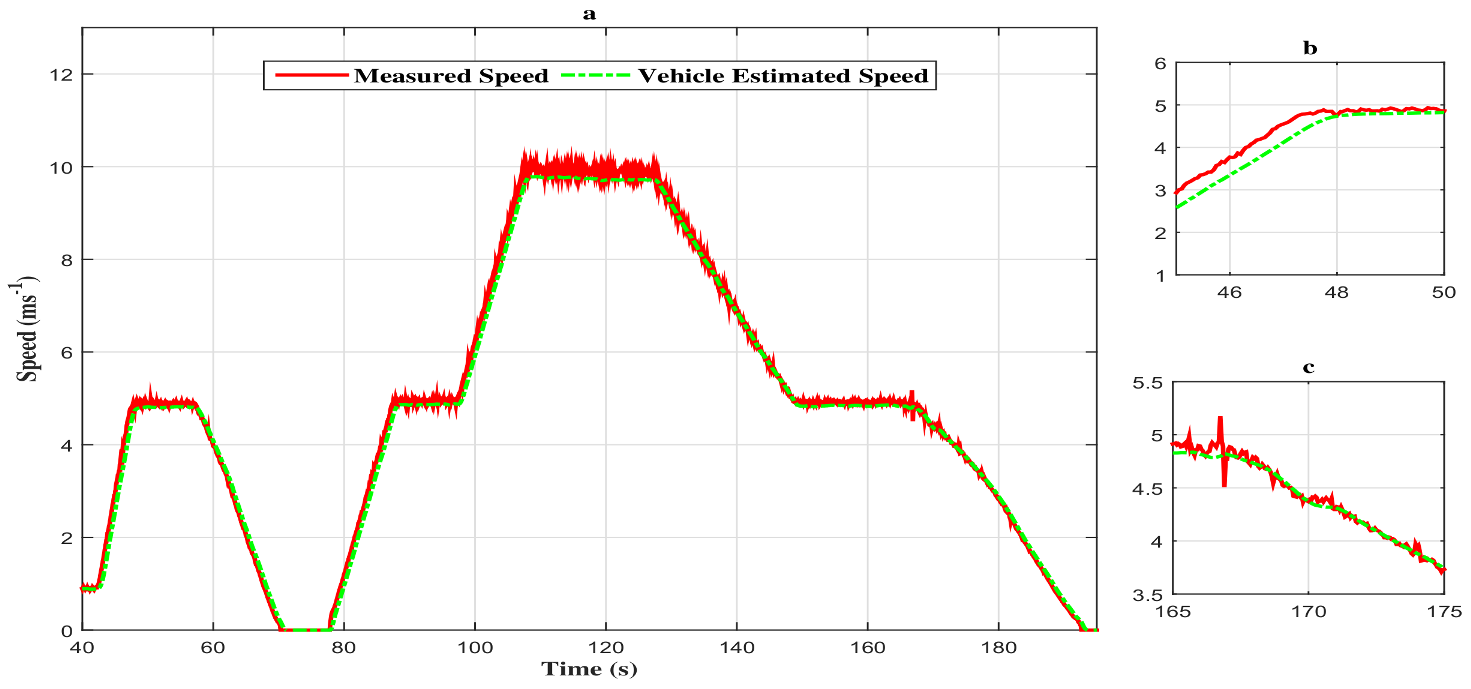
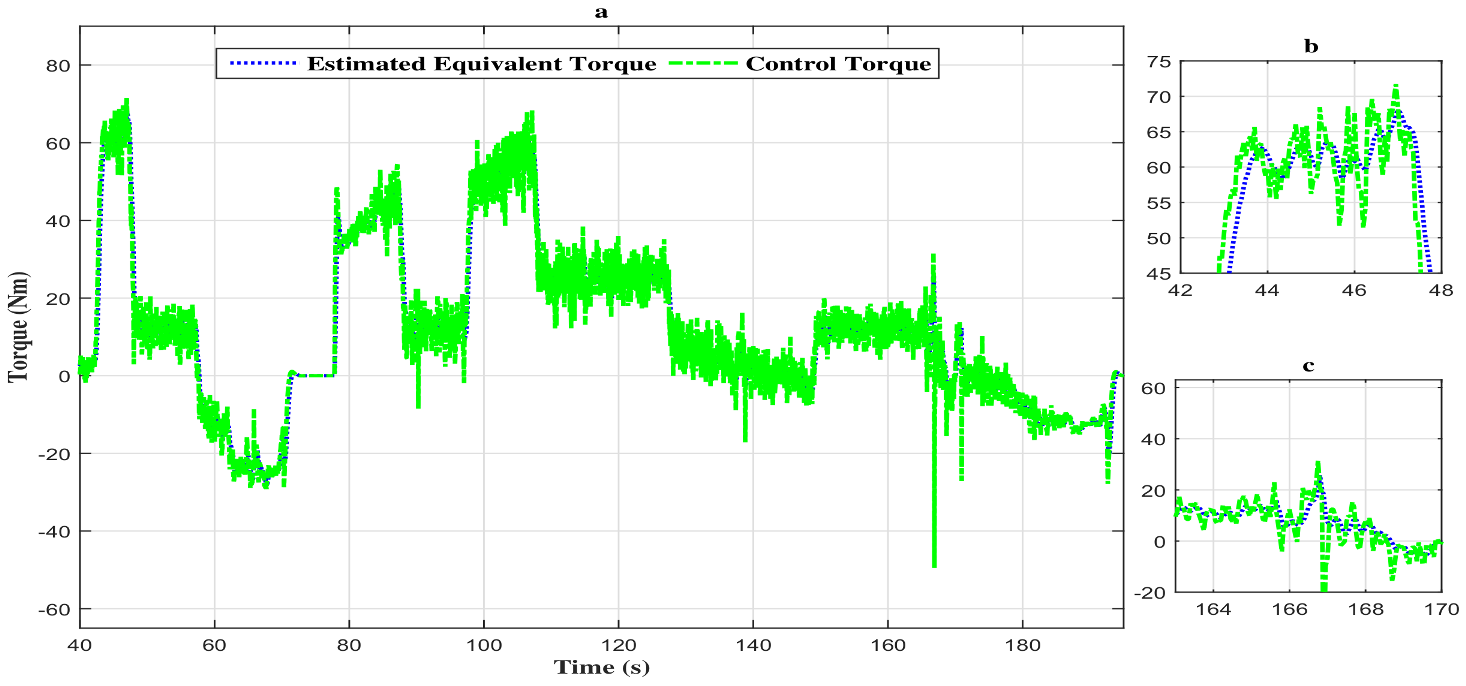
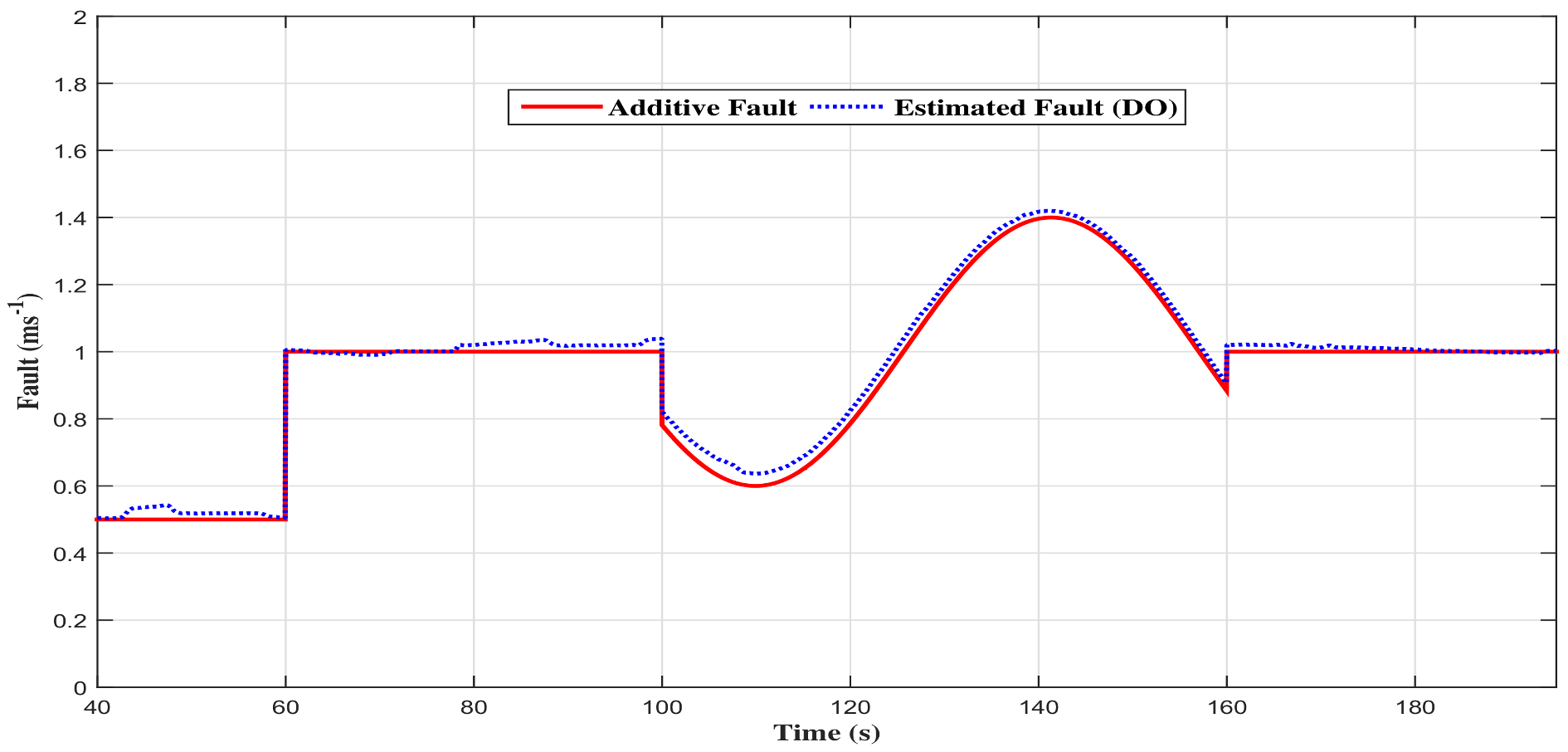
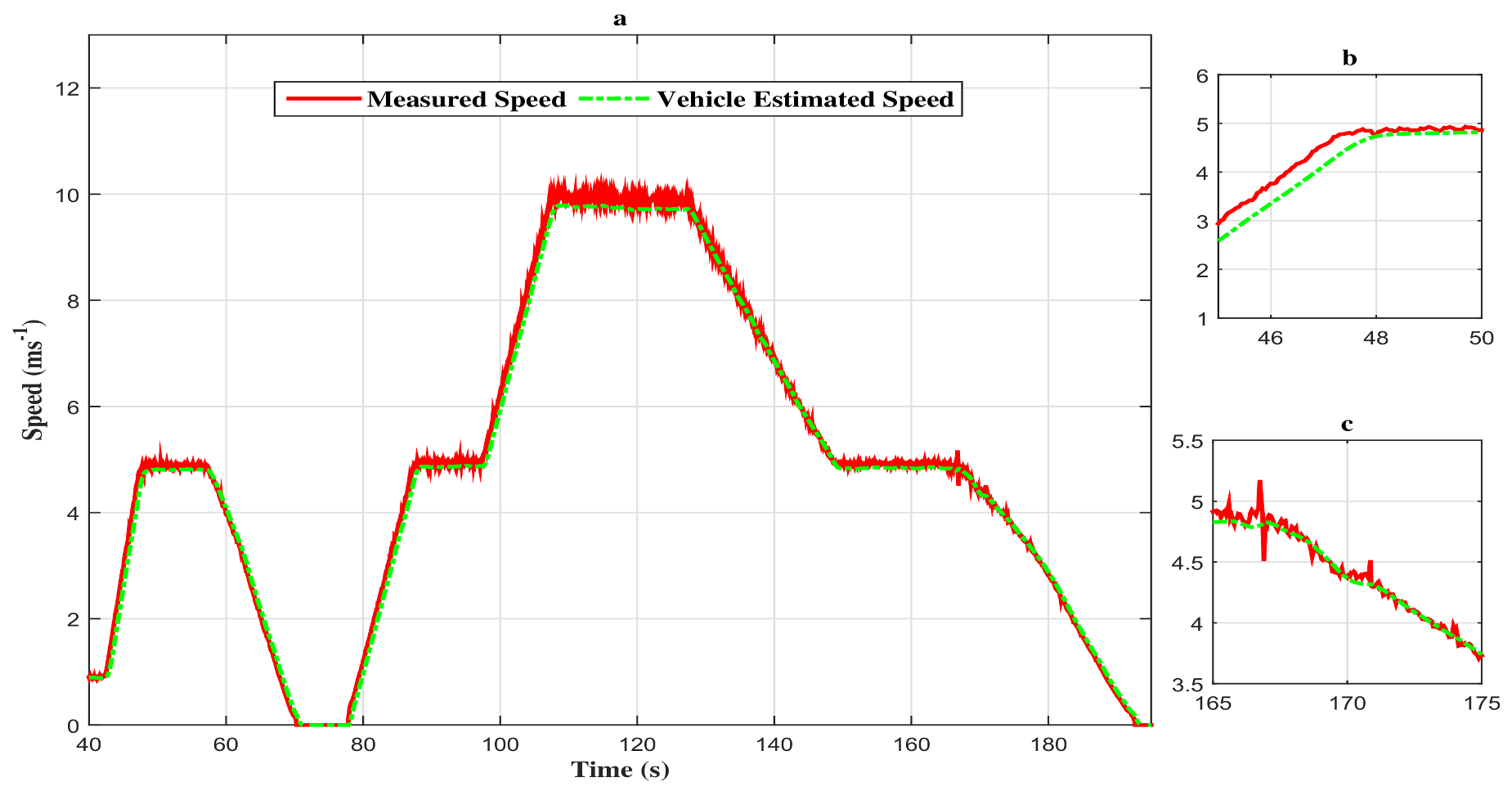
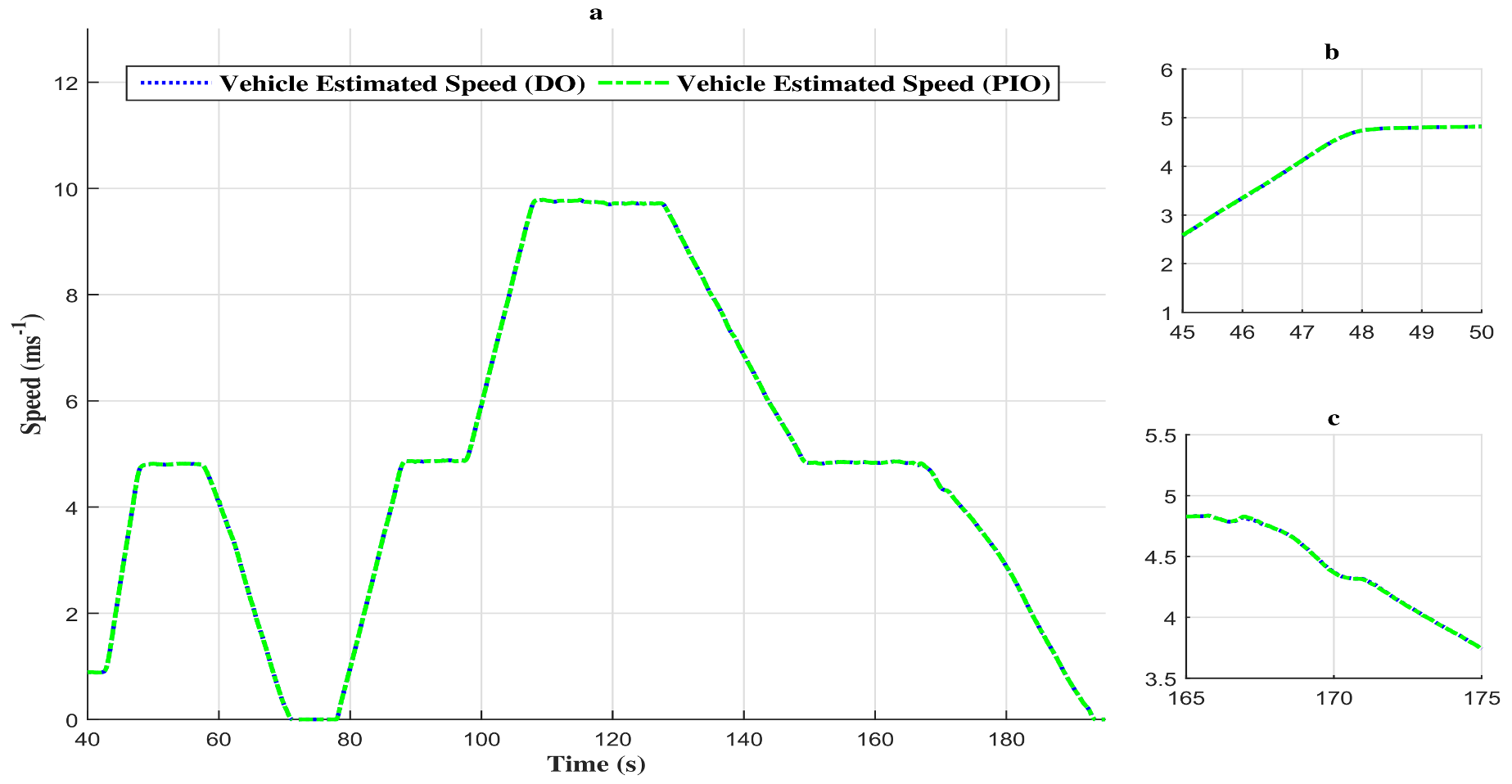
4.1. Descriptor Observer Results
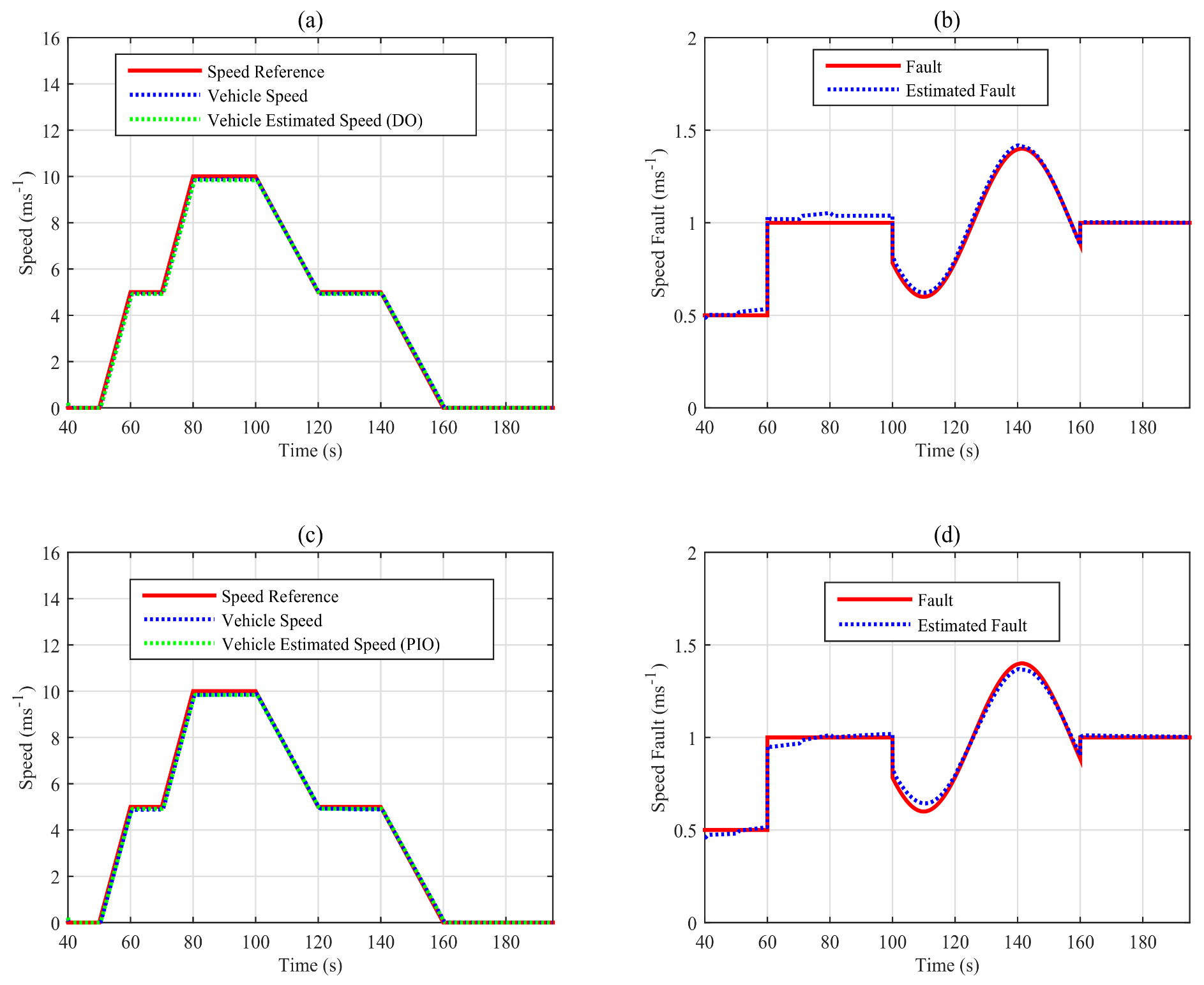
- The estimated states (speed, equivalent torque and fault) converge quickly toward the real states;
- The performances obtained are good in dynamic, as well as in static output;
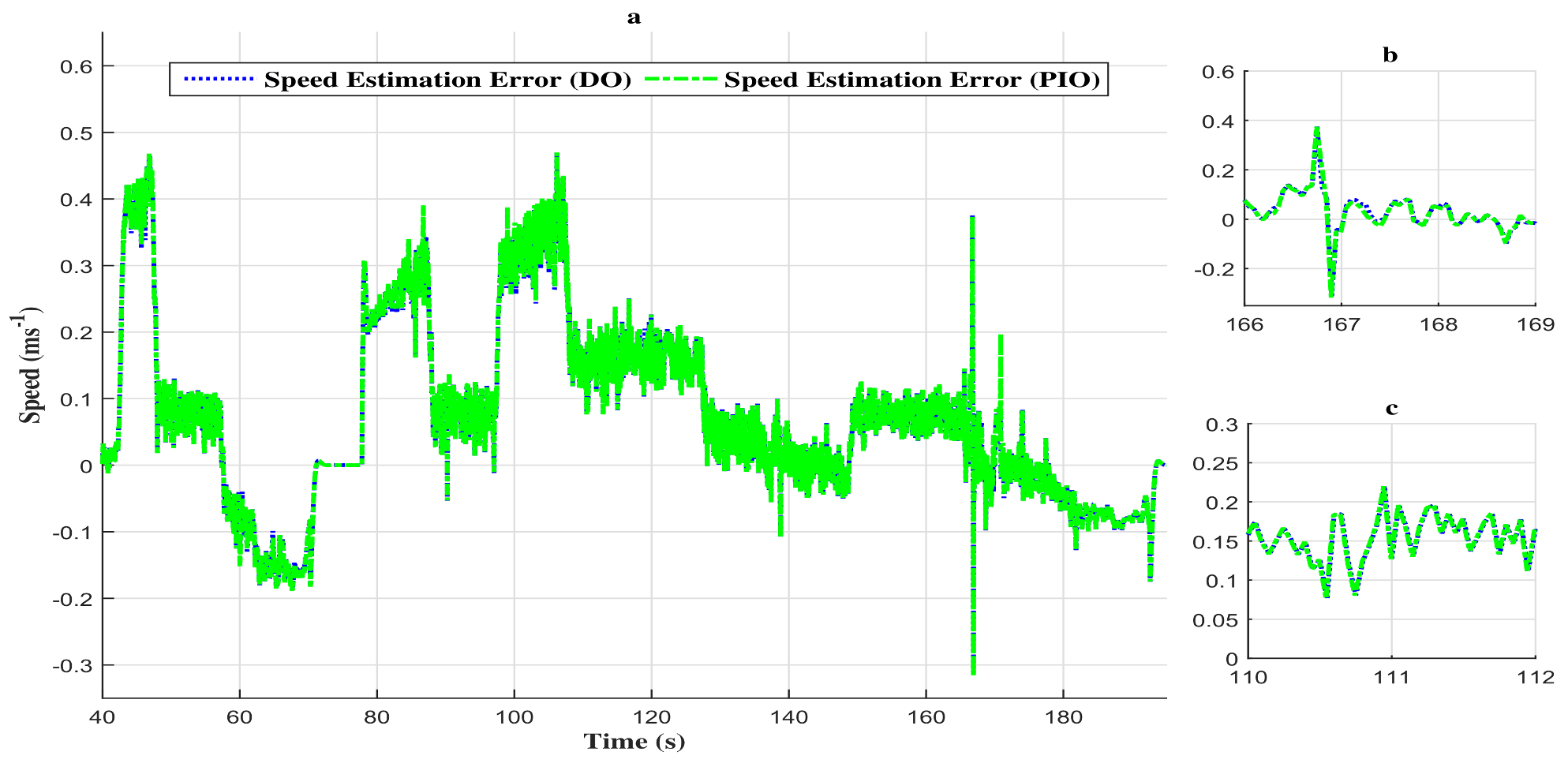
- The observation errors are steered to zero in finite time;
- The estimated vehicle speed seems to be insensitive to the fault variation and, so, in different phases of the considered driving scenario (accelerating phase, decelerating phase and constant speed phase).
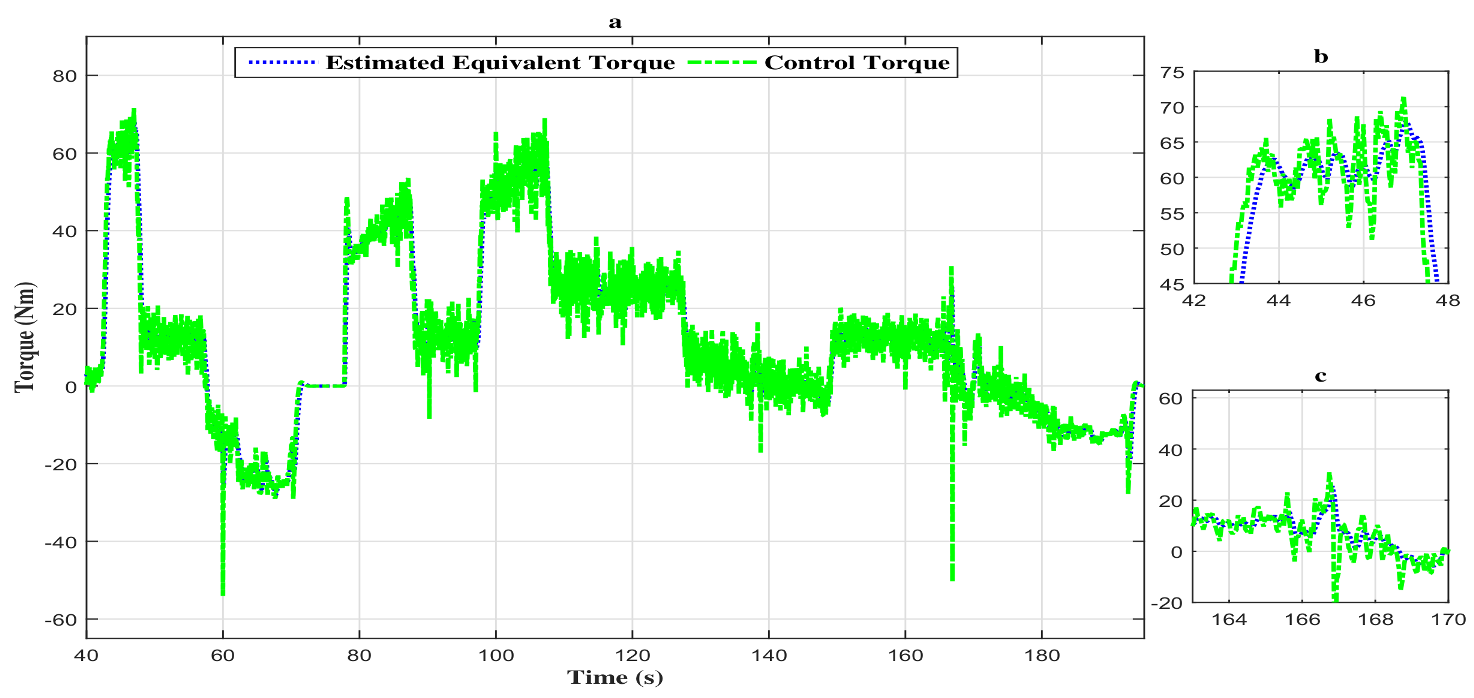
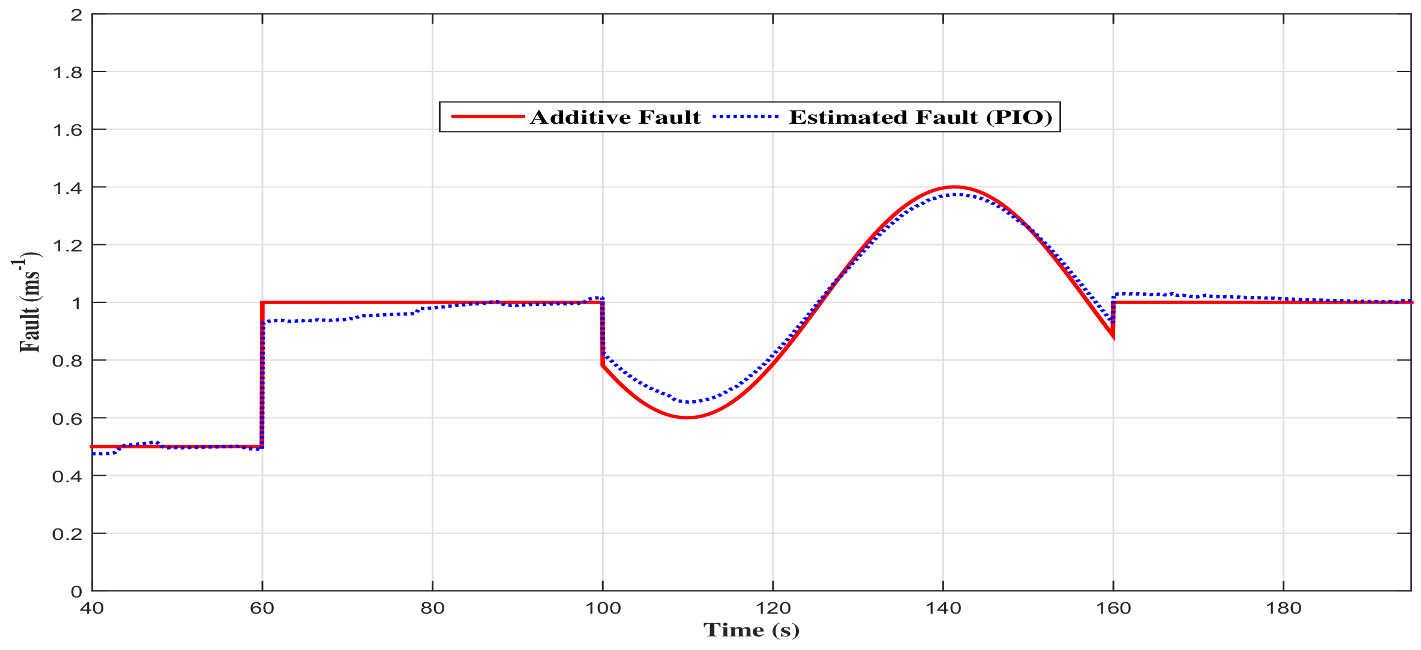
4.2. Proportional and Integral Observer Results
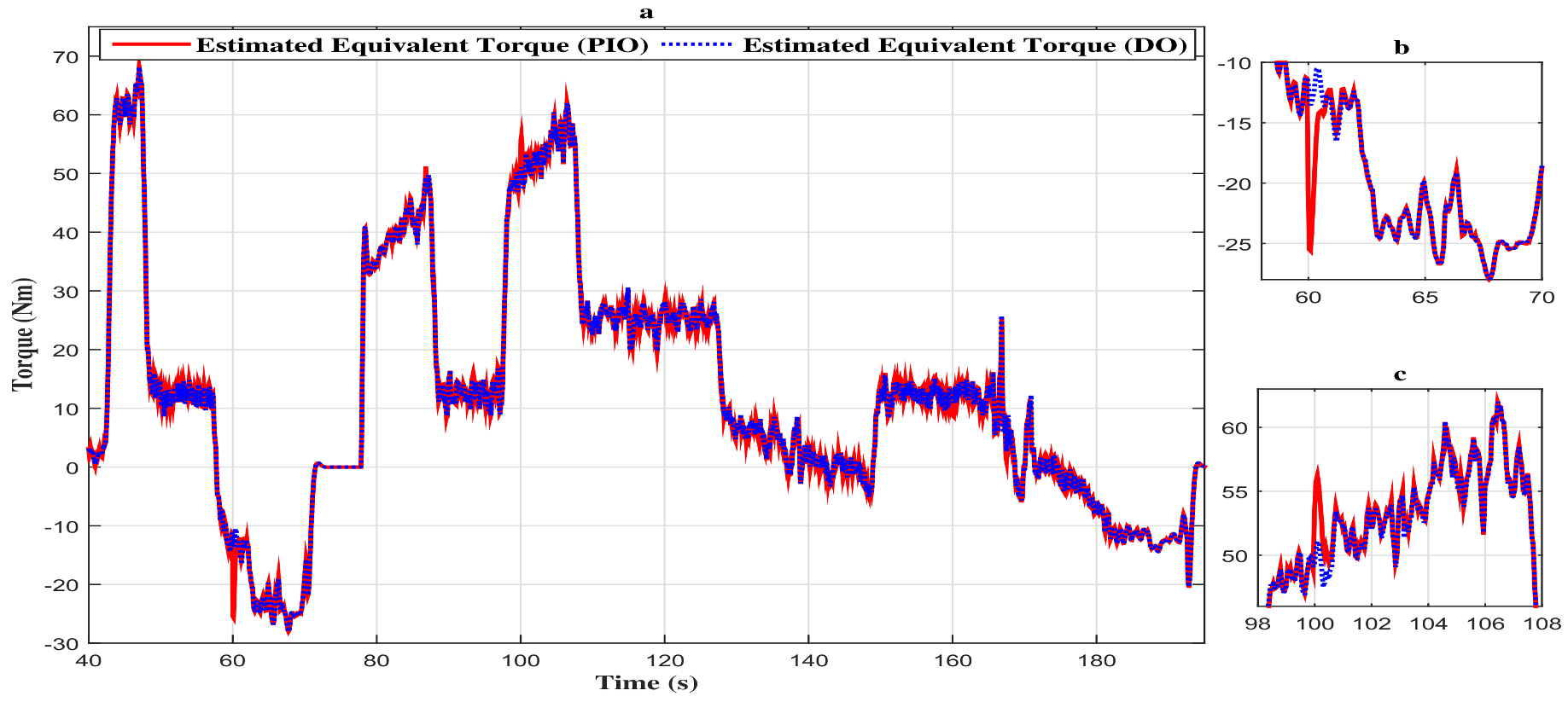
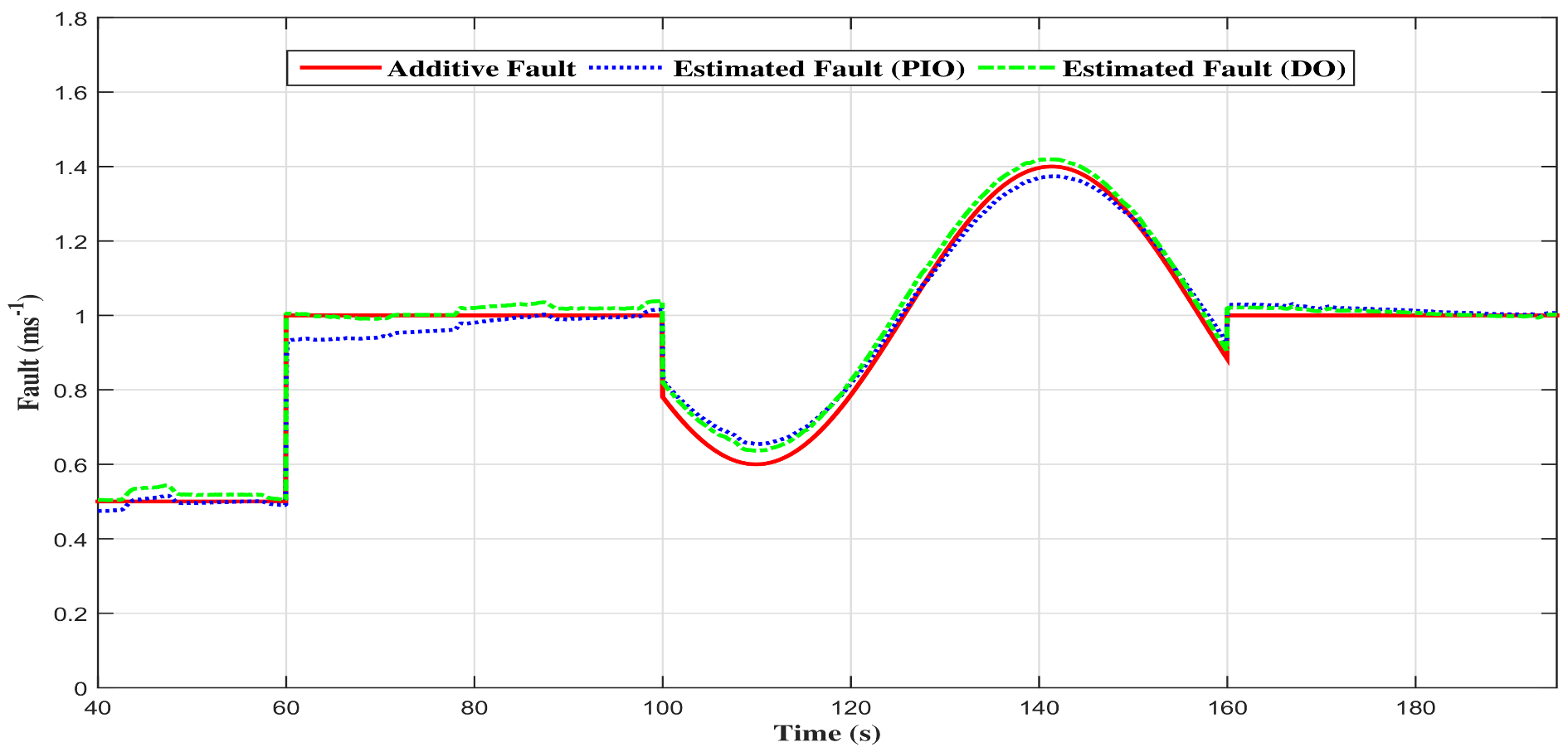
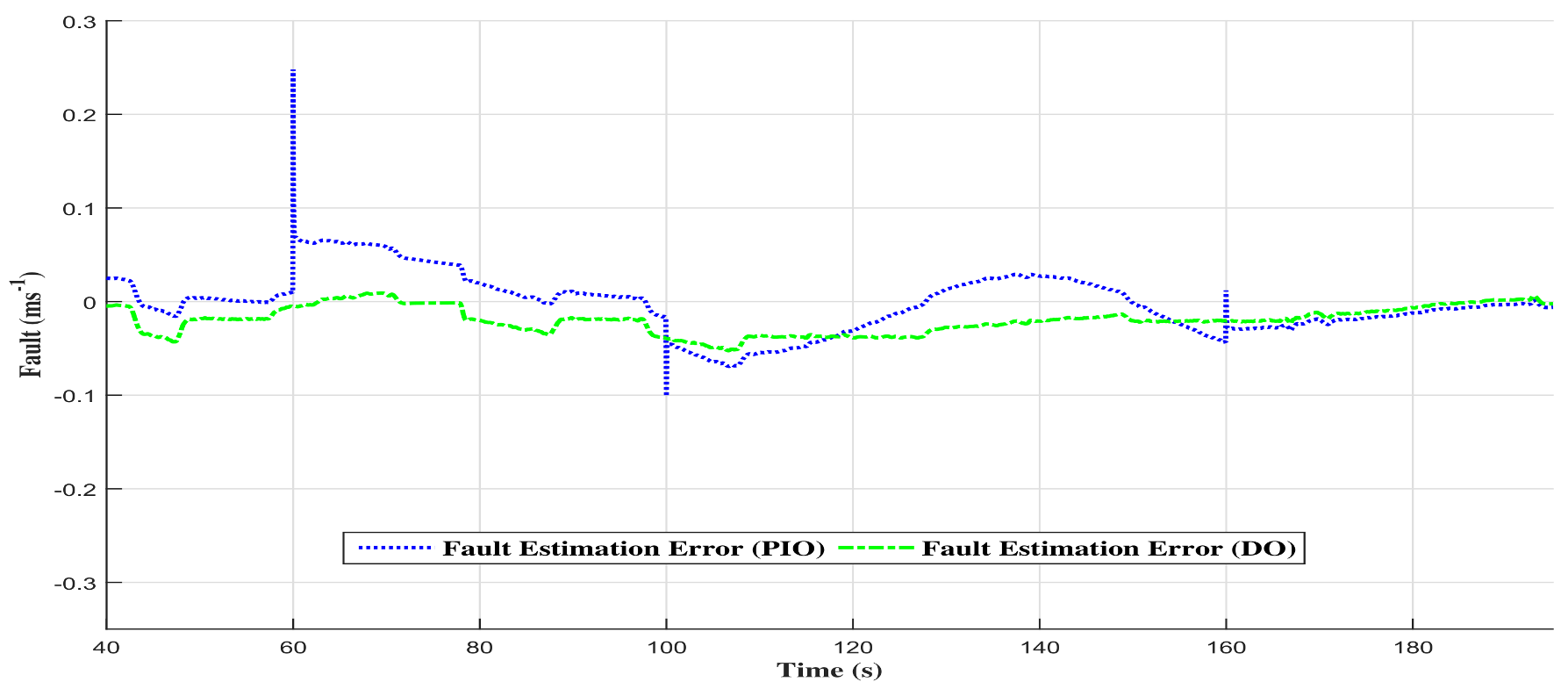
4.3. Comparison of the Two Observers
4.4. FTC Results
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| SAE | Society of Automotive Engineers |
| ADAS | Advanced Driver-Assistance Systems |
| FDD | Fault Detection and Diagnosis |
| FTC | Fault Tolerant Control |
| LMI | Linear Matrix Inequality |
| BMI | Bilinear Matrix Inequality |
| MABx | MicroAutoBox |
| LTI | Linear Time Invariant |
| DO | Descriptor Observer |
| PIO | Proportional and Integral Observer |
| SOF | Static Output Feedback |
Appendix A. The Different Gain Matrices
- The static output feedback controller:The optimization is run for an objective of and took eight steps.The state feedback gain is obtained with a criterion of , and matrices: , , and .Thus, the initializing state feedback gain is given:.At the end of the algorithm, the criterion of the the two parts is given: , .The the static output feedback control gain is given:.
- The proportional and integral observer:For an criterion of with a gain norm of , the proportional and integral gains are given by:, ,with the following positive semi-definite matrices:, ,and:, . , .
- The descriptor observer:For an criterion of with a gain norm of , the descriptor gain is given by:, ,so that:,with the following positive semi definite matrices:, , ,with:, , , , .
References
- SAE On-Road Automated Vehicle Standards Committee. Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems; SAE International: Brussels, Belgium, 2014. [Google Scholar]
- Kichun, J.O.; Junsoo, K.; Dongchul, K.; Chulhoon, J.; Myoungho, S. Development of autonomous car—Part I: Distributed system architecture and development process. IEEE Trans. Ind. Electron. 2014, 61, 7131–7140. [Google Scholar]
- Boukhnifer, M.; Raisemche, A.; Diallo, D.; Larouci, C. Fault tolerant control to mechanical sensor failures for induction motor drive: A comparative study of voting algorithms. In Proceedings of the 2013 39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013. [Google Scholar]
- James, D.; Kent, A., Jr.; Holloway, J. Redundancy and the detection of first failures. IRE Trans. Reliab. Qual. Control 1962, RQC-11, 8–27. [Google Scholar] [CrossRef]
- Boukhari, M.R.; Chaibet, A.; Boukhnifer, M.; Glaser, S. Sensor fault tolerant control strategy for autonomous vehicle driving. Proceedings of 2016 13th International Multi-Conference on the Systems, Signals & Devices (SSD), Leipzig, Germany, 21–24 March 2016; pp. 241–248. [Google Scholar]
- Hu, C.; Jing, H.; Wang, R.; Yan, F.; Chadli, M. Robust H∞ output-feedback control for path following of autonomous ground vehicles. Mech. Syst. Signal Processing 2016, 70, 414–427. [Google Scholar] [CrossRef]
- Wang, R.; Jing, H.; Wang, J.; Chadli, M.; Chen, N. Robust output-feedback based vehicle lateral motion control considering network-induced delay and tire force saturation. Neurocomputing 2016, 214, 409–419. [Google Scholar] [CrossRef]
- Wang, R.; Hu, C.; Yan, F.; Chadli, M. Composite nonlinear feedback control for path following of four-wheel independently actuated autonomous ground vehicles. IEEE Trans. Intell. Transp. Syst. Mag. 2016, 17, 2063–2074. [Google Scholar] [CrossRef]
- Willsky, A.S. A survey of design methods for failure detection in dynamic systems. Automatica 1976, 12, 601–611. [Google Scholar] [CrossRef] [Green Version]
- Isermann, R. Process fault detection based on modeling and estimation methods-a survey. Automatica 1984, 20, 387–404. [Google Scholar] [CrossRef]
- Frank, P.M. Fault diagnosis in dynamic systems using analytical and knowledge-based redundancy: A survey and some new results. Automatica 1990, 26, 459–474. [Google Scholar] [CrossRef]
- Stengel, R.F. Intelligent failure tolerant control. In Proceedings of the 5th IEEE International Symposium on Intelligent Control, Philadelphia, PA, USA, 5–7 September 1990; pp. 548–557. [Google Scholar]
- Sottile, J., Jr.; Holloway, L.E. An overview of fault monitoring and diagnosis in mining equipment. IEEE Trans. Ind. Appl. 1994, 30, 1326–1332. [Google Scholar] [CrossRef]
- Frank, P.M.; Ding, X. Survey of robust residual generation and evaluation methods in observer-based fault detection systems. J. Process Control 1997, 7, 403–424. [Google Scholar] [CrossRef]
- Isermann, R. Model-based fault-detection and diagnosis-status and applications. Annu. Rev. Control 2005, 29, 71–85. [Google Scholar] [CrossRef]
- Benosman, M. A survey of some recent results on nonlinear fault-tolerant control. Math. Probl. Eng. 2009, 2010. [Google Scholar] [CrossRef]
- Verhaegen, M.; Kanev, S.; Hallouzi, R.; Jones, C.; Maciejowski, J.; Smail, H. Fault-tolerant fight control—A survey. In Fault Tolerant Flight Control; Springer: Heidelberg/Berlin, Germany, 2010; pp. 47–89. [Google Scholar]
- Xu, Y.; Jiang, B.; Gao, Z.; Zhang, K. Fault-tolerant control for near space vehicle: a survey and some new results. J. Syst. Eng. Electron. 2011, 22, 88–94. [Google Scholar] [CrossRef]
- Silveira, A.; Araujo, R.E.; de Castro, R. Survey on fault-tolerant diagnosis and control systems applied to multi-motor electric vehicles. In Technological Innovation for Sustainability; Springer: Heidelberg/Berlin, Germany, 2011; pp. 359–366. [Google Scholar]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Yu, X.; Jiang, J. A survey of fault-tolerant controllers based on safety-related issues. Annu. Rev. Control 2015, 39, 46–57. [Google Scholar] [CrossRef]
- Samy, I.; Gu, D.-W. Fault detection and isolation (FDI). In Lecture Notes in Control and Information Sciences; Springer: Berlin, Germany, 2012; pp. 5–17. [Google Scholar]
- Blanke, b.; Kinnaert, M.; Lunze, J.; Staroswiecki, M. Distributed fault diagnosis and fault-tolerant control. In Diagnosis and Fault-Tolerant Control; Springer: Berlin, Germany, 2016; pp. 3–27. [Google Scholar]
- Voege, T.; Godziejewski, B.; Merat, N.; Rødseth, Ø.J.; van Schijndel-de Nooij, M. Connected and Automated Transport-Expert Group Report; European Commission: Brussels, Belgium, 2017. [Google Scholar]
- Uhlmann, J.K. Covariance consistency methods for fault-tolerant distributed data fusion. Inf. Fusion 2003, 4, 201–215. [Google Scholar] [CrossRef]
- Toulotte, P.-F.; Delprat, S.; Guerra, T.-M.; Boonaert, J. Vehicle spacing control using robust fuzzy control with pole placement in lmi region. Eng. Appl. Artif. Intell. 2008, 21, 756–768. [Google Scholar] [CrossRef]
- Patton, R.J.; Frank, P.M.; Clarke, R.N. Fault Diagnosis in Dynamic Systems: Theory and Application; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1989. [Google Scholar]
- Ding, X.; Guo, L.; Jeinsch, T. A characterization of parity space and its application to robust fault detection. IEEE Trans. Autom. Control 1999, 44, 337–343. [Google Scholar] [CrossRef]
- Zarei, J.; Shokri, E. Robust sensor fault detection based on nonlinear unknown input observer. Measurement 2014, 48, 355–367. [Google Scholar] [CrossRef]
- Gao, Z.; Liu, X.; Chen, E.; Michael, Z.Q. Unknown input observer-based robust fault estimation for systems corrupted by partially decoupled disturbances. IEEE Trans. Ind. Electron. 2016, 63, 2537–2547. [Google Scholar] [CrossRef]
- Zhang, K.; Liu, G.; Jiang, B. Robust Unknown Input Observer-Based Fault Estimation of Leader–Follower Linear Multi-agent Systems. Circuits Syst. Signal Process. 2017, 36, 525–542. [Google Scholar] [CrossRef]
- Han, J.; Zhang, H.; Wang, Y.; Liu, Y. Disturbance observer based fault estimation and dynamic output feedback fault tolerant control for fuzzy systems with local nonlinear models. ISA Trans. 2015, 59, 114–124. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Han, J.; Luo, C. Fault-Tolerant Control of a Nonlinear System Based on Generalized Fuzzy Hyperbolic Model and Adaptive Disturbance Observer. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2289–2300. [Google Scholar] [CrossRef]
- Zhang, J.; Swain, A.K.; Nguang, E.; Kiong, S. Robust H∞ adaptive descriptor observer design for fault estimation of uncertain nonlinear systems. J. Frankl. Inst. 2014, 351, 5162–5181. [Google Scholar]
- Yin, S.; Gao, H.; Qiu, J.; Kaynak, O. Descriptor reduced-order sliding mode observers design for switched systems with sensor and actuator faults. Automatica 2017, 76, 282–292. [Google Scholar] [CrossRef]
- Dongsheng, D.U. Fault detection for discrete-time linear systems based on descriptor observer approach. Appl. Math. Comput. 2017, 293, 575–585. [Google Scholar]
- Foo, G.H.B.; Zhang, X.; Vilathgamuwa, D.M. A sensor fault detection and isolation method in interior permanent-magnet synchronous motor drives based on an extended Kalman filter. IEEE Trans. Ind. Electron. 2013, 60, 3485–3495. [Google Scholar] [CrossRef]
- Mrugalski, M. An unscented Kalman filter in designing dynamic GMDH neural networks for robust fault detection. Int. J. Appl. Math. Comput. Sci. 2013, 23, 157–169. [Google Scholar] [CrossRef] [Green Version]
- Pourbabaee, B.; Meskin, N.; Khorasani, K. Sensor fault detection, isolation, and identification using multiple-model-based hybrid Kalman filter for gas turbine engines. IEEE Trans. Control Syst. Technol. 2016, 24, 1184–1200. [Google Scholar] [CrossRef]
- Yu, M.; Wang, D. Model-based health monitoring for a vehicle steering system with multiple faults of unknown types. IEEE Trans. Ind. Electron. 2014, 61, 3574–3586. [Google Scholar]
- Granig, W.; Hammerschmidt, D.; Zangl, H. Calculation of failure detection probability on safety mechanisms of correlated sensor signals according to iso 26262. SAE Int. J. Passenger Cars Electron. Electr. Syst. 2017, 10, 144–155. [Google Scholar] [CrossRef]
- Boukhari, M.R.; Chaibet, A.; Boukhnifer, M.; Glaser, S. Fault tolerant control for lipschitz nonlinear systems: Vehicle inter-distance control application. IFAC-PapersOnLine 2017, 50, 14248–14253. [Google Scholar] [CrossRef]
- Hedrick, H. Brake System Modeling, Control and Integrated Brake/Throttle Switching Phase I; California PATH Research Report UCB-ITS-PRR-97-21; University of California: Berkeley, CA, USA, 1997. [Google Scholar]
- Pham, H.; Tomizuka, M.; Hedrick, J.K. Integrated Maneuvering Control for Automated Highway Systems Based on a Magnetic Reference/Sensing System; California PATH Research Report UCB-ITS-PRR-97-28; University of California: Berkeley, CA, USA, 1997. [Google Scholar]
- Saad, Y.; Sosonkina, M. Distributed Schur complement techniques for general sparse linear systems. SIAM J. Sci. Comput. 1999, 21, 1337–1356. [Google Scholar] [CrossRef]
- de Oliveira, M.C. A robust version of the elimination lemma. IFAC Proceedings Volumes 2005, 38, 310–314. [Google Scholar] [CrossRef]
- Syrmos, V.L.; Abdallah, C.T.; Dorato, P.E.A.; Grigoriadis, K. Static output feedback—A survey. Automatica 1997, 33, 125–137. [Google Scholar] [CrossRef] [Green Version]
- Yoshio, E.; Dimitri, P.; Denis, A. Chapter Static Output-Feedback Synthesis, Book S-Variable Approach to LMI-Based Robust Control; Springer: London, UK, 2015; pp. 165–198. ISBN 978-1-4471-6606-1. [Google Scholar]
- Bakhshande, F.; SöFfker, D. Proportional-integral-observer: A brief survey with special attention to the actual methods using acc benchmark. IFAC PapersOnLine 2015, 48, 532–537. [Google Scholar] [CrossRef]
- Valibeygi, A.; Toudeshki, A.; Vijayaraghavan, K. Observer-based sensor fault estimation in nonlinear systems. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2016, 230, 759–777. [Google Scholar] [CrossRef]
- Doyle, J.C.; Glover, K.; Khargonekar, P.P.; Francis, B.A. State-space solutions to standard H2 and H∞ control problems. IEEE Trans. Autom. Control 1989, 34, 831–847. [Google Scholar] [CrossRef]
- Guerra, T.M.; Estrada-Manzo, V.; Lendek, Z. Observer design for takagi-sugeno descriptor models: An LMI approach. Automatica 2015, 52, 154–159. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
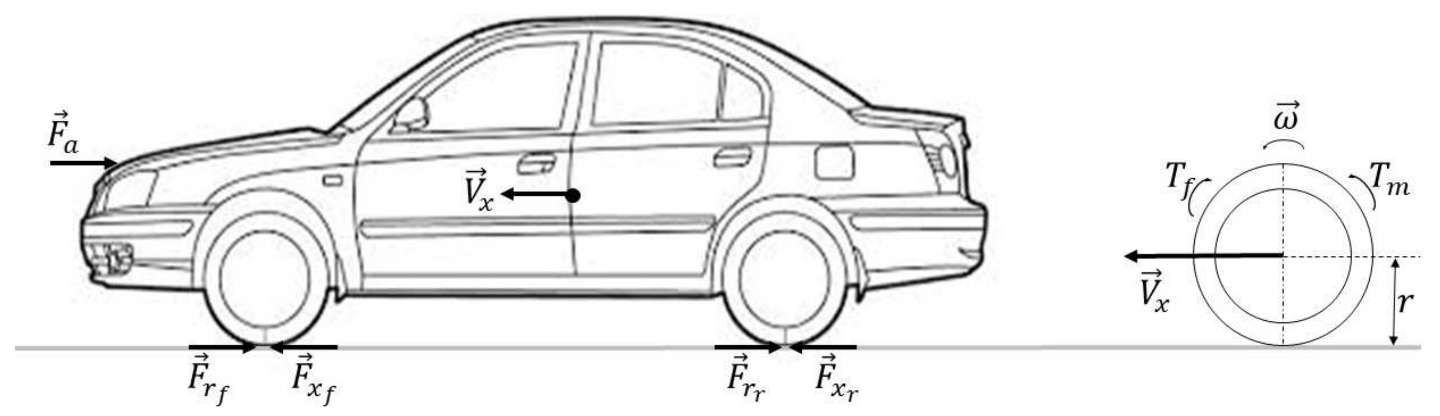
| Notation | Definition | Unit |
|---|---|---|
| m | Vehicle mass | kg |
| Vehicle speed | ms | |
| Tire/road force of the i-th wheel | N | |
| Aerodynamic force | N | |
| Global inertia of the front axle | kg·m | |
| Inertia of the i-th front wheel | kg·m | |
| Acceleration of the i-th wheel | rad·s | |
| The engine torque | Nm | |
| r | The tire radius | m |
| The rolling force of the i-th wheel | N | |
| The braking torque of the i-th wheel | Nm | |
| The rolling torque of the front/rear axle | Nm | |
| Global inertia of the rear axle | kg·m | |
| Inertia of the i-th rear wheel | kg·m |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boukhari, M.R.; Chaibet, A.; Boukhnifer, M.; Glaser, S. Proprioceptive Sensors’ Fault Tolerant Control Strategy for an Autonomous Vehicle. Sensors 2018, 18, 1893. https://doi.org/10.3390/s18061893
Boukhari MR, Chaibet A, Boukhnifer M, Glaser S. Proprioceptive Sensors’ Fault Tolerant Control Strategy for an Autonomous Vehicle. Sensors. 2018; 18(6):1893. https://doi.org/10.3390/s18061893
Chicago/Turabian StyleBoukhari, Mohamed Riad, Ahmed Chaibet, Moussa Boukhnifer, and Sébastien Glaser. 2018. "Proprioceptive Sensors’ Fault Tolerant Control Strategy for an Autonomous Vehicle" Sensors 18, no. 6: 1893. https://doi.org/10.3390/s18061893
APA StyleBoukhari, M. R., Chaibet, A., Boukhnifer, M., & Glaser, S. (2018). Proprioceptive Sensors’ Fault Tolerant Control Strategy for an Autonomous Vehicle. Sensors, 18(6), 1893. https://doi.org/10.3390/s18061893