
Pine-YOLO: A Method for Detecting Pine Wilt Disease in Unmanned Aerial Vehicle Remote Sensing Images

Abstract
:1. Introduction
2. Materials and Methods
2.1. Image Acquisition
2.2. Image Pre-Processing
2.3. Detection Networks
2.3.1. Pine-YOLO Network Structure
2.3.2. Dynamic Snake Convolution (DSConv)
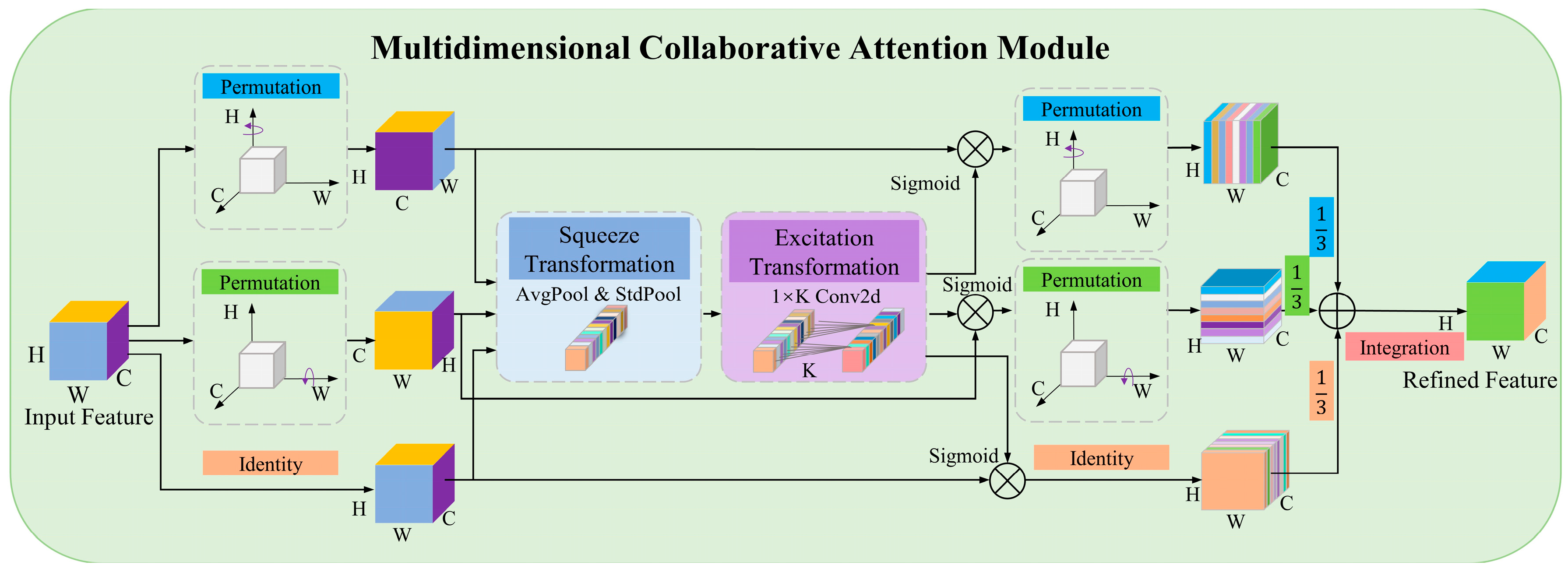
2.3.3. Multidimensional Collaborative Attention Mechanism
- (1)
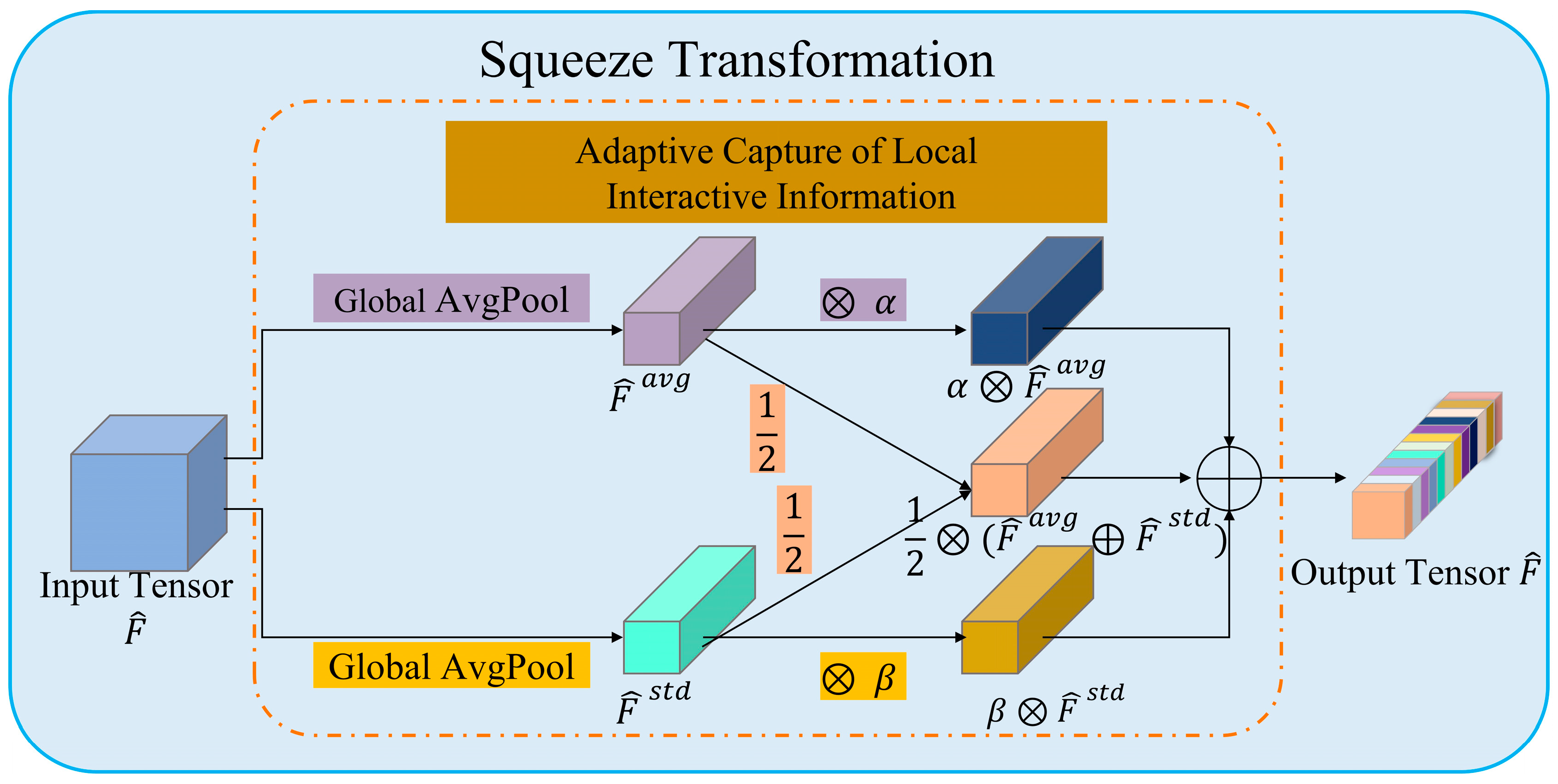
- Squeeze: A method for adaptively combining dual interaction information
- (2)
- Motivation: A method for adaptively combining the capture of local feature interactions
- (3)
- Integration: Triple focus collaboration
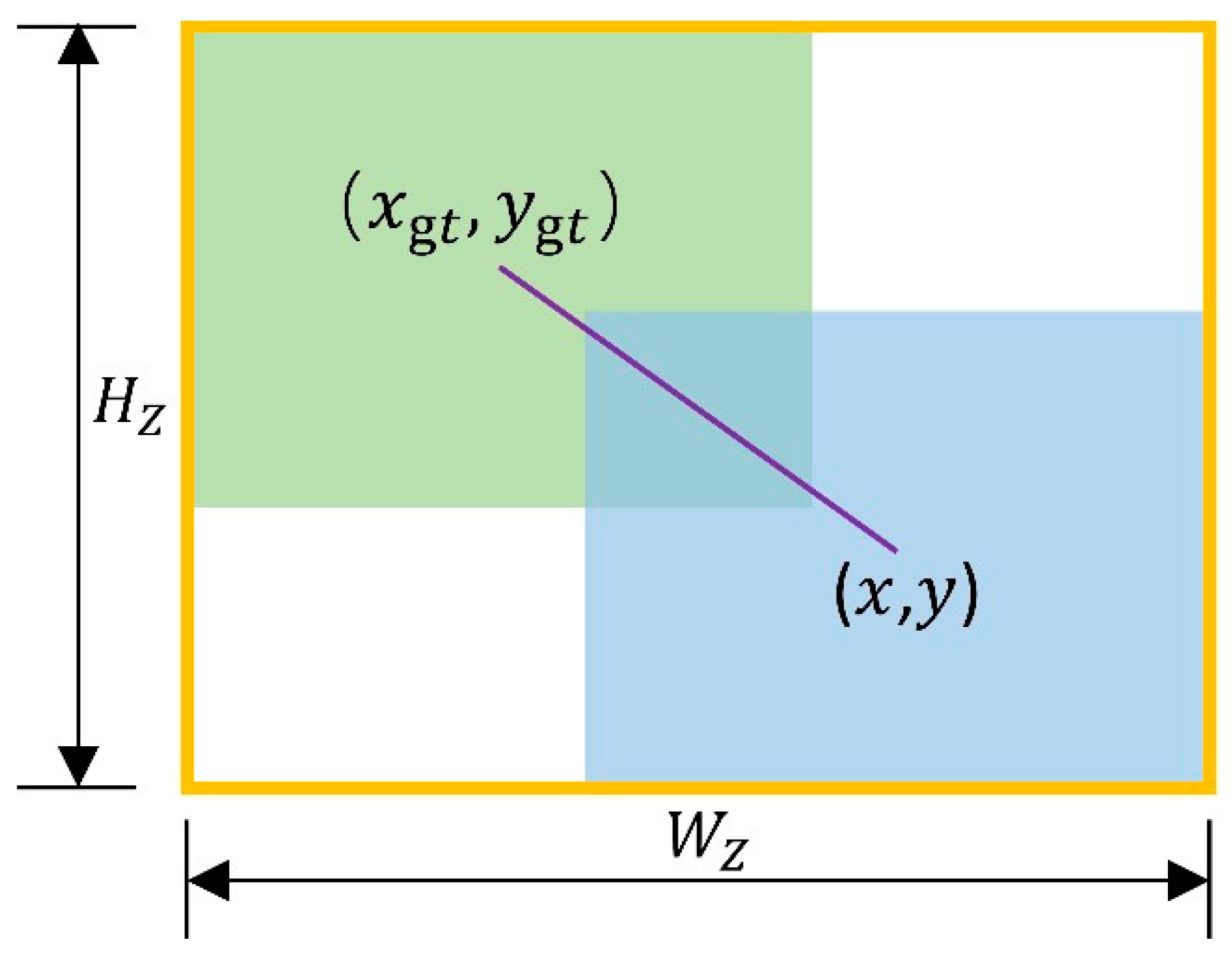
2.3.4. WIoUv3 Loss Function
2.4. Parameter Settings and Evaluation Metrics
3. Results and Discussions
3.1. Detection Results from Alternative Methods
3.2. Ablation Experiment
3.3. Pine-YOLO Composite Indicator Assessment and Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, M.; Li, H.; Ding, X.; Wang, L.; Wang, X.; Chen, F. The detection of pine wilt disease: A literature review. Int. J. Mol. Sci. 2022, 23, 10797. [Google Scholar] [CrossRef]
- Lu, X.; Huang, J.; Li, X.; Fang, G.; Liu, D. The interaction of environmental factors increases the risk of spatiotemporal transmission of pine wilt disease. Ecol. Indic. 2021, 133, 108394. [Google Scholar] [CrossRef]
- Kim, B.-N.; Kim, J.H.; Ahn, J.-Y.; Kim, S.; Cho, B.-K.; Kim, Y.-H.; Min, J. A short review of the pinewood nematode, Bursaphelenchus xylophilus. Toxicol. Environ. Health Sci. 2020, 12, 297–304. [Google Scholar] [CrossRef]
- Hao, Z.; Huang, J.; Li, X.; Sun, H.; Fang, G. A multi-point aggregation trend of the outbreak of pine wilt disease in China over the past 20 years. For. Ecol. Manag. 2022, 505, 119890. [Google Scholar] [CrossRef]
- Gao, R.; Liu, L.; Li, R.; Fan, S.; Dong, J.; Zhao, L. Predicting potential distributions of Monochamus saltuarius, a novel insect vector of pine wilt disease in China. Front. For. Glob. Chang. 2023, 6, 1243996. [Google Scholar] [CrossRef]
- Wang, W.; Zhu, Q.; He, G.; Liu, X.; Peng, W.; Cai, Y. Impacts of climate change on pine wilt disease outbreaks and associated carbon stock losses. Agric. For. Meteorol. 2023, 334, 109426. [Google Scholar] [CrossRef]
- Sharma, A.; Cory, B.; McKeithen, J.; Frazier, J. Structural diversity of the longleaf pine ecosystem. For. Ecol. Manag. 2020, 462, 117987. [Google Scholar] [CrossRef]
- Hu, G.; Yao, P.; Wan, M.; Bao, W.; Zeng, W. Detection and classification of diseased pine trees with different levels of severity from UAV remote sensing images. Ecol. Inf. 2022, 72, 101844. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Guimarães, N.; Pádua, L.; Marques, P.; Silva, N.; Peres, E.; Sousa, J.J. Forestry remote sensing from unmanned aerial vehicles: A review focusing on the data, processing and potentialities. Remote Sens. 2020, 12, 1046. [Google Scholar] [CrossRef]
- Syifa, M.; Park, S.-J.; Lee, C.-W. Detection of the pine wilt disease tree candidates for drone remote sensing using artificial intelligence techniques. Engineering 2020, 6, 919–926. [Google Scholar] [CrossRef]
- Oide, A.H.; Nagasaka, Y.; Tanaka, K. Performance of machine learning algorithms for detecting pine wilt disease infection using visible color imagery by UAV remote sensing. Remote Sens. Appl. Soc. Environ. 2022, 28, 100869. [Google Scholar] [CrossRef]
- Iordache, M.-D.; Mantas, V.; Baltazar, E.; Pauly, K.; Lewyckyj, N. A machine learning approach to detecting pine wilt disease using airborne spectral imagery. Remote Sens. 2020, 12, 2280. [Google Scholar] [CrossRef]
- Yu, R.; Luo, Y.; Zhou, Q.; Zhang, X.; Wu, D.; Ren, L. A machine learning algorithm to detect pine wilt disease using UAV-based hyperspectral imagery and LiDAR data at the tree level. Int. J. Appl. Earth Obs. Geoinf. 2021, 101, 102363. [Google Scholar] [CrossRef]
- Wu, D.; Yu, L.; Yu, R.; Zhou, Q.; Li, J.; Zhang, X.; Ren, L.; Luo, Y. Detection of the monitoring window for pine wilt disease using multi-temporal UAV-based multispectral imagery and machine learning algorithms. Remote Sens. 2023, 15, 444. [Google Scholar] [CrossRef]
- Park, H.G.; Yun, J.P.; Kim, M.Y.; Jeong, S.H. Multichannel object detection for detecting suspected trees with pine wilt disease using multispectral drone imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 8350–8358. [Google Scholar] [CrossRef]
- Li, W.; An, B.; Kong, Y. Data Augmentation Method on Pine Wilt Disease Recognition. In Proceedings of the Intelligence Science IV, 5th IFIP TC International Conference, Xi’an, China, 28–31 October 2022; pp. 458–465. [Google Scholar] [CrossRef]
- Rao, D.; Zhang, D.; Lu, H.; Yang, Y.; Qiu, Y.; Ding, M.; Yu, X. Deep learning combined with Balance Mixup for the detection of pine wilt disease using multispectral imagery. Comput. Electron. Agric. 2023, 208, 107778. [Google Scholar] [CrossRef]
- Cai, P.; Chen, G.; Yang, H.; Li, X.; Zhu, K.; Wang, T.; Liao, P.; Han, M.; Gong, Y.; Wang, Q.; et al. Detecting individual plants infected with pine wilt disease using drones and satellite imagery: A case study in Xianning, China. Remote Sens. 2023, 15, 2671. [Google Scholar] [CrossRef]
- Zhang, R.; You, J.; Lee, J. Detecting pine trees damaged by wilt disease using deep learning techniques applied to multi-spectral images. IEEE Access 2022, 10, 39108–39118. [Google Scholar] [CrossRef]
- Xia, L.; Zhang, R.; Chen, L.; Li, L.; Yi, T.; Wen, Y.; Ding, C.; Xie, C. Evaluation of deep learning segmentation models for detection of pine wilt disease in unmanned aerial vehicle images. Remote Sens. 2021, 13, 3594. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, J.; Sun, H.; Lu, X.; Huang, J.; Wang, S.; Fang, G. Satellite remote sensing identification of discolored standing trees for pine wilt disease based on semi-supervised deep learning. Remote Sens. 2022, 14, 5936. [Google Scholar] [CrossRef]
- Chen, Y.; Yan, E.; Jiang, J.; Zhang, G.; Mo, D. An efficient approach to monitoring pine wilt disease severity based on random sampling plots and UAV imagery. Ecol. Indic. 2023, 156, 111215. [Google Scholar] [CrossRef]
- Sun, Z.; Ibrayim, M.; Hamdulla, A. Detection of pine wilt nematode from drone images using UAV. Sensors 2022, 22, 4704. [Google Scholar] [CrossRef] [PubMed]
- Hu, G.; Yin, C.; Wan, M.; Zhang, Y.; Fang, Y. Recognition of diseased Pinus trees in UAV images using deep learning and AdaBoost classifier. Biosyst. Eng. 2020, 194, 138–151. [Google Scholar] [CrossRef]
- Qin, B.; Sun, F.; Shen, W.; Dong, B.; Ma, S.; Huo, X.; Lan, P. Deep learning-based pine nematode trees’ identification using multispectral and visible UAV imagery. Drones 2023, 7, 183. [Google Scholar] [CrossRef]
- Huang, J.; Lu, X.; Chen, L.; Sun, H.; Wang, S.; Fang, G. Accurate identification of pine wood nematode disease with a deep convolution neural network. Remote Sens. 2022, 14, 913. [Google Scholar] [CrossRef]
- Wu, K.; Zhang, J.; Yin, X.; Wen, S.; Lan, Y. An improved YOLO model for detecting trees suffering from pine wilt disease at different stages of infection. Remote Sens. Lett. 2023, 14, 114–123. [Google Scholar] [CrossRef]
- Deng, X.; Tong, Z.; Lan, Y.; Huang, Z. Detection and location of dead trees with pine wilt disease based on deep learning and UAV remote sensing. AgriEngineering 2020, 2, 294–307. [Google Scholar] [CrossRef]
- Li, F.; Liu, Z.; Shen, W.; Wang, Y.; Wang, Y.; Ge, C.; Sun, F.; Lan, P. A remote sensing and airborne edge-computing based detection system for pine wilt disease. IEEE Access 2021, 9, 66346–66360. [Google Scholar] [CrossRef]
- Abdollahnejad, A.; Panagiotidis, D.; Surový, P.; Modlinger, R. Investigating the correlation between multisource remote sensing data for predicting potential spread of Ips typographus L. spots in healthy trees. Remote Sens. 2021, 13, 4953. [Google Scholar] [CrossRef]
- Ren, D.; Peng, Y.; Sun, H.; Yu, M.; Yu, J.; Liu, Z. A global multi-scale channel adaptation network for pine wilt disease tree detection on UAV imagery by circle sampling. Drones 2022, 6, 353. [Google Scholar] [CrossRef]
- Zhang, P.; Wang, Z.; Rao, Y.; Zheng, J.; Zhang, N.; Wang, D.; Zhu, J.; Fang, Y.; Gao, X. Identification of pine wilt disease infected wood using UAV RGB imagery and improved YOLOv5 models integrated with attention mechanisms. Forests 2023, 14, 588. [Google Scholar] [CrossRef]
- Qin, J.; Wang, B.; Wu, Y.; Lu, Q.; Zhu, H. Identifying pine wood nematode disease using UAV images and deep learning algorithms. Remote Sens. 2021, 13, 162. [Google Scholar] [CrossRef]
- Han, Z.; Hu, W.; Peng, S.; Lin, H.; Zhang, J.; Zhou, J.; Wang, P.; Dian, Y. Detection of standing dead trees after pine wilt disease outbreak with airborne remote sensing imagery by multi-scale spatial attention deep learning and Gaussian kernel approach. Remote Sens. 2022, 14, 3075. [Google Scholar] [CrossRef]
- Li, Y.; Fan, Q.; Huang, H.; Han, Z.; Gu, Q. A modified YOLOv8 detection network for UAV aerial image recognition. Drones 2023, 7, 304. [Google Scholar] [CrossRef]
- Qi, Y.; He, Y.; Qi, X.; Zhang, Y.; Yang, G. Dynamic Snake Convolution based on Topological Geometric Constraints for Tubular Structure Segmentation. In Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision (ICCV), Paris, France, 1–6 October 2023; pp. 6047–6056. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, Y.; Cheng, Z.; Song, Z.; Tang, C. MCA: Multidimensional collaborative attention in deep convolutional neural networks for image recognition. Eng. Appl. Artif. Intell. 2023, 126, 107079. [Google Scholar] [CrossRef]
- Tong, Z.; Chen, Y.; Xu, Z.; Yu, R. Wise-IoU: Bounding box regression loss with dynamic focusing mechanism. arXiv 2023, arXiv:2301.10051. [Google Scholar] [CrossRef]
- Ye, W.; Lao, J.; Liu, Y.; Chang, C.-C.; Zhang, Z.; Li, H.; Zhou, H. Pine pest detection using remote sensing satellite images combined with a multi-scale attention-UNet model. Ecol. Inf. 2022, 72, 101906. [Google Scholar] [CrossRef]
- Gong, H.; Ding, Y.; Li, D.; Wang, W.; Li, Z. Recognition of Pine Wood Affected by Pine Wilt Disease Based on YOLOv5. In Proceedings of the 2022 China Automation Congress (CAC), Xiamen, China, 25–27 November 2022; pp. 4753–4757. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detection Models | [email protected] | [email protected]:0.95 | Precision | Recall | F1-Score |
|---|---|---|---|---|---|
| Faster-RCNN | 76.00% | 38.50% | 68.42% | 79.59% | 73.58% |
| RetinaNet | 70.80% | 38.60% | 67.80% | 81.63% | 74.08% |
| YOLOv5 | 82.72% | 47.16% | 68.81% | 82.84% | 74.76% |
| YOLOX | 73.10% | 46.40% | 77.08% | 75.51% | 76.29% |
| DETR | 81.92% | 45.00% | 80.39% | 83.67% | 82.00% |
| MA-Unet * | - | - | 57.45% | 50.56% | 46.78% |
| YOLOv5-PWD * | 84.5% | - | 87.8% | 76.8% | 81.93% |
| Pine-YOLO | 90.69% | 49.72% | 91.31% | 85.72% | 88.43% |
| DSConv. | MCA | WIoUv3 | [email protected] | [email protected]:0.95 | Precision | Recall | F1-Score |
|---|---|---|---|---|---|---|---|
| - | - | - | 78.46% | 47.55% | 74.42% | 83.67% | 78.77% |
| √ | - | - | 85.34% | 43.11% | 88.74% | 83.67% | 86.13% |
| - | √ | - | 85.56% | 47.17% | 82.90% | 85.71% | 84.28% |
| - | - | √ | 82.65% | 50.61% | 75.71% | 82.64% | 79.02% |
| √ | √ | - | 88.70% | 48.91% | 93.64% | 83.67% | 88.37% |
| √ | - | √ | 86.56% | 49.06% | 85.94% | 87.64% | 86.78% |
| - | √ | √ | 87.76% | 46.99% | 89.82% | 85.71% | 87.72% |
| √ | √ | √ | 90.69% | 49.72% | 91.31% | 85.72% | 88.43% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, J.; Song, B.; Chen, X.; Zhang, M.; Dong, X.; Liu, H.; Liu, F.; Zhang, L.; Lu, Y.; Xu, C.; et al. Pine-YOLO: A Method for Detecting Pine Wilt Disease in Unmanned Aerial Vehicle Remote Sensing Images. Forests 2024, 15, 737. https://doi.org/10.3390/f15050737
Yao J, Song B, Chen X, Zhang M, Dong X, Liu H, Liu F, Zhang L, Lu Y, Xu C, et al. Pine-YOLO: A Method for Detecting Pine Wilt Disease in Unmanned Aerial Vehicle Remote Sensing Images. Forests. 2024; 15(5):737. https://doi.org/10.3390/f15050737
Chicago/Turabian StyleYao, Junsheng, Bin Song, Xuanyu Chen, Mengqi Zhang, Xiaotong Dong, Huiwen Liu, Fangchao Liu, Li Zhang, Yingbo Lu, Chang Xu, and et al. 2024. "Pine-YOLO: A Method for Detecting Pine Wilt Disease in Unmanned Aerial Vehicle Remote Sensing Images" Forests 15, no. 5: 737. https://doi.org/10.3390/f15050737