Development of a Sensor Network System with High Sampling Rate Based on Highly Accurate Simultaneous Synchronization of Clock and Data Acquisition and Experimental Verification †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Background
- data acquisition at the same timing in every sensor; and
- highly dense data.
1.2. Related Works
1.3. Our Previous Researches
1.4. Robot Control with Sensory Feedback
1.5. Purpose
- good data synchronization (approximately ten microsecond order);
- high sampling rate (over 500 Hz); and
- general-purpose property (not requiring special hardware).
1.6. Applications
- Robot control, which can achieve switch control using the recognition about the transition of contact/noncontact state, and an intelligent control using sensor fusion with multiple sensors’ data.
- Intelligent transport system (ITS), which can perform collision avoidance, lane change, and fully automated driving control.
- Security and surveillance, which can perform the tracking of a number of humans in a huge facility, and robust target tracking under occlusion.
2. Method for Clock and Data-Acquisition Synchronization
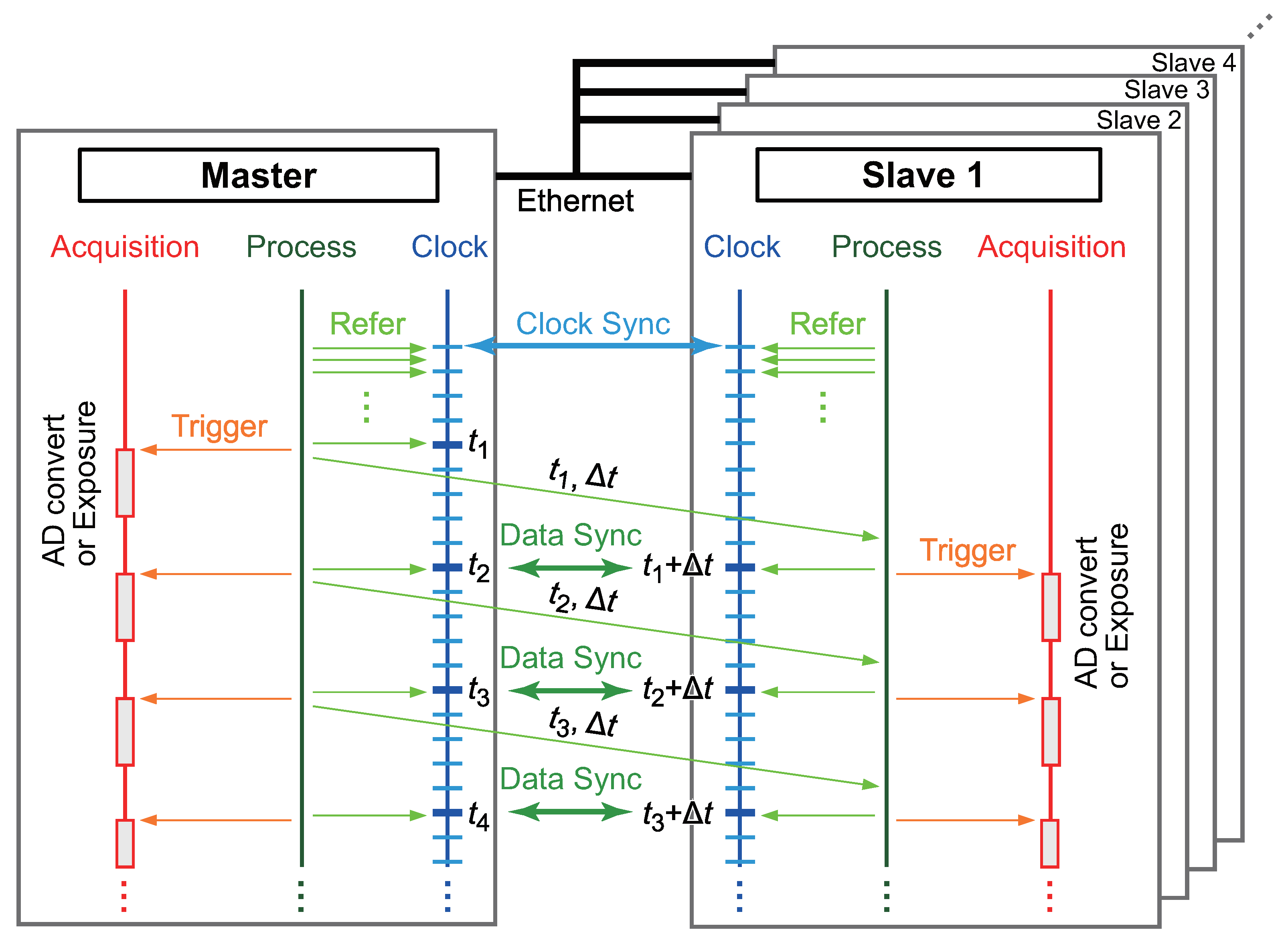
2.1. Clock Synchronization
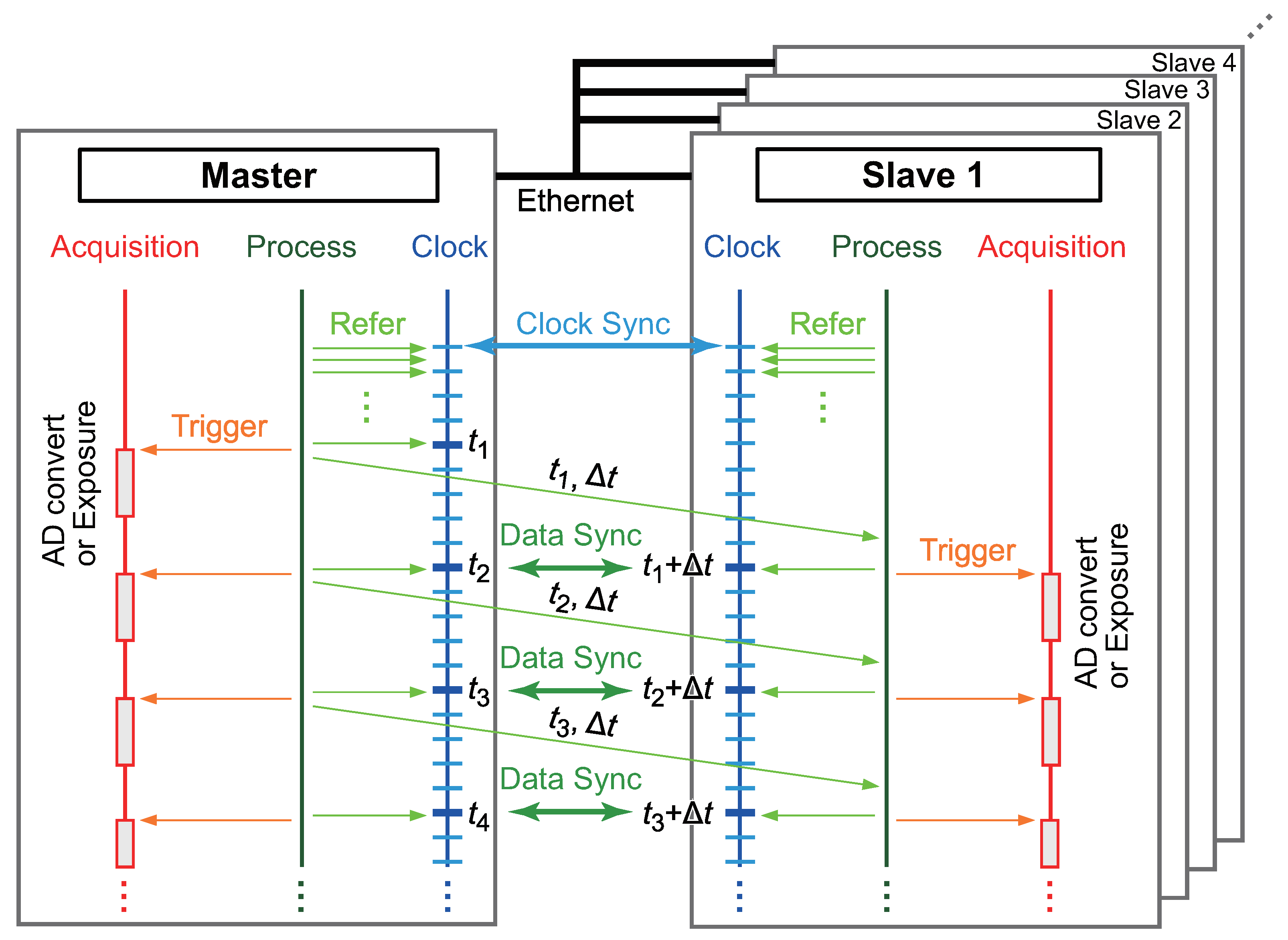
2.2. Data-Acquisition Synchronization
- When the first acquisition triggers, the master refers to the clock and sends the time stamp of the trigger, , and the sampling time, , to the slave via Ethernet.
- The sent data arrive at the slave after a network delay.
- The slave calculates the next acquisition timing as , and triggers the acquisition at time . The master also triggers the acquisition at .
3. Sensor Network System with High Sampling Rate Based on Highly Accurate Simultaneous Synchronization of Clock and Data Acquisition
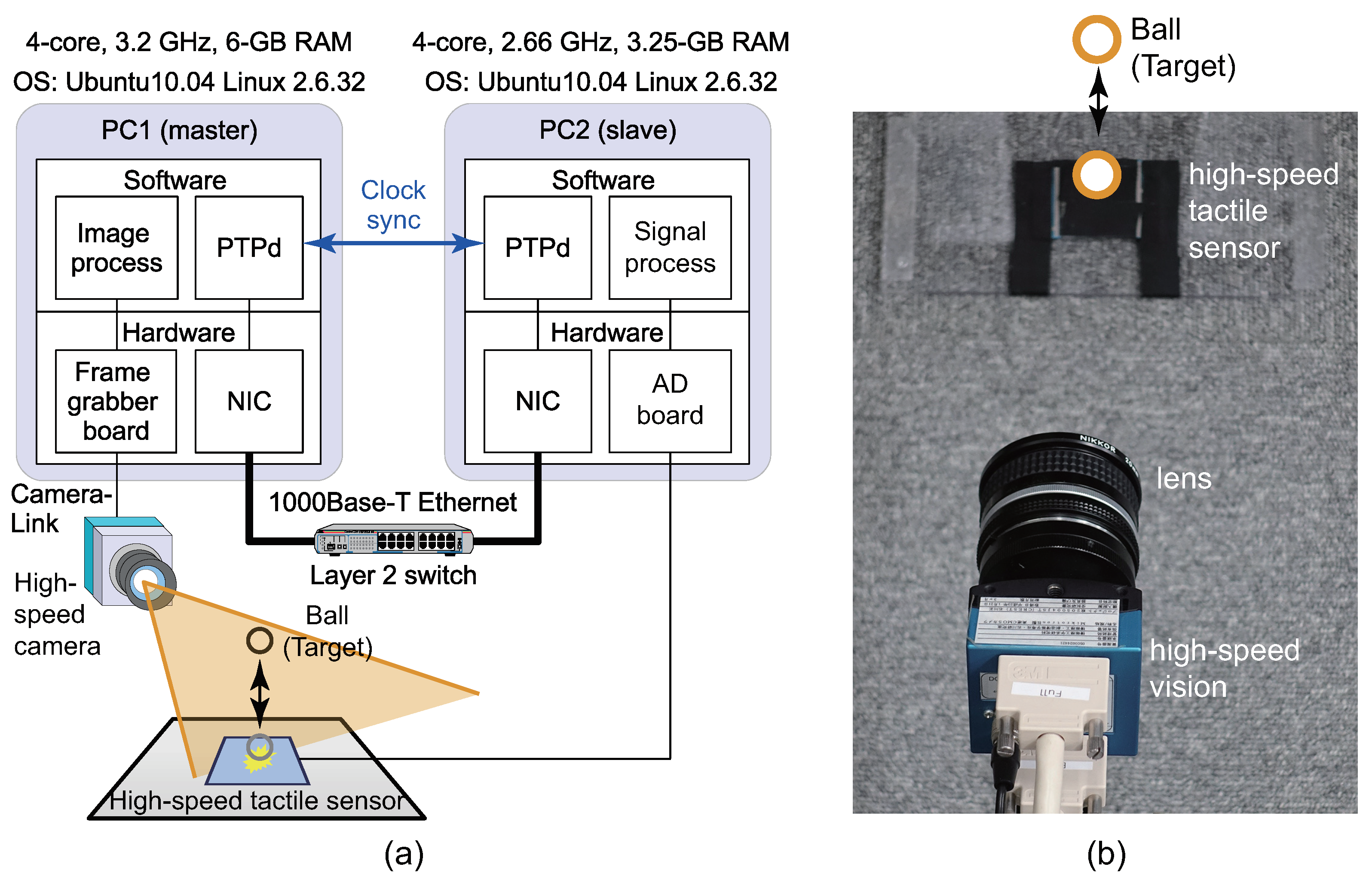
3.1. High-Speed Tactile Sensor Node
3.2. High-Speed Vision Node
- The background image was acquired previously. In the tracking method, the target image was extracted by background subtraction.
- Binarization for the obtained image was executed, and the image centroid of the target was calculated based on the image moments given bywhere is the -th order image moments defined aswhere equals the pixel value at . is the zero-order image moment, and and are the first-order image moments in x and y directions, respectively.
- Once the object image was acquired and the centroid of the object was measured, a region of interest (ROI) was controlled around the centroid. The ROI size was set as 200 × 200 pixels to reduce the computational load in the experiments.
3.3. General-Purpose Acceleration Sensor Node
3.4. General-Purpose Gyro Sensor Node
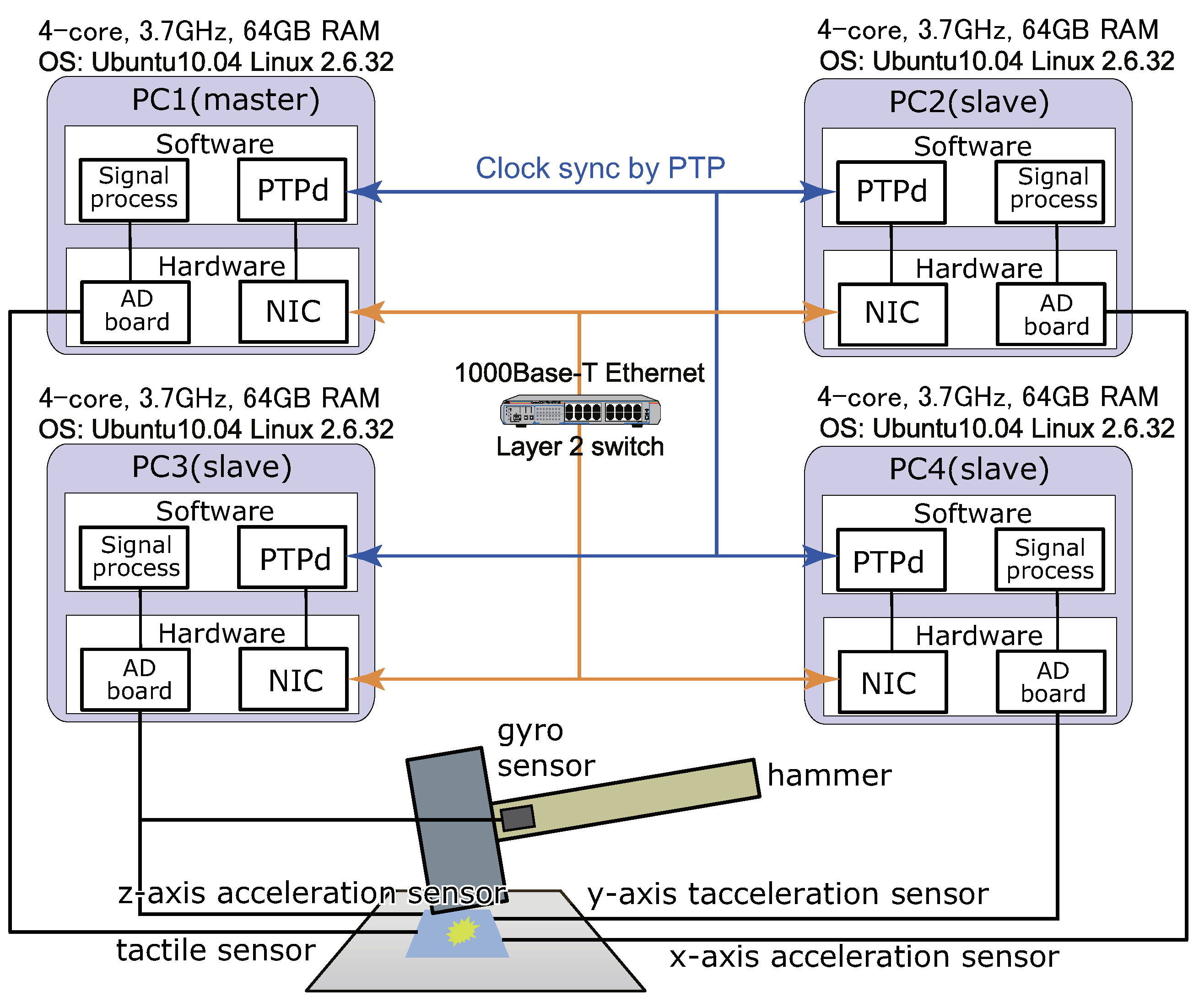
3.5. Overall System
4. Experimental Verification
- Evaluation of clock synchronization (Section 4.1);
- Experiment 1 in high-speed tactile and vision sensor network system (Section 4.2.1);
- Experiment 2 in high-speed tactile and vision sensor network system (Section 4.2.2);
- Experiments in tactile and acceleration network sensor system with various sampling times (Section 4.3); and
- Experiments in tactile, gyro, and acceleration sensor network system (Section 4.4).
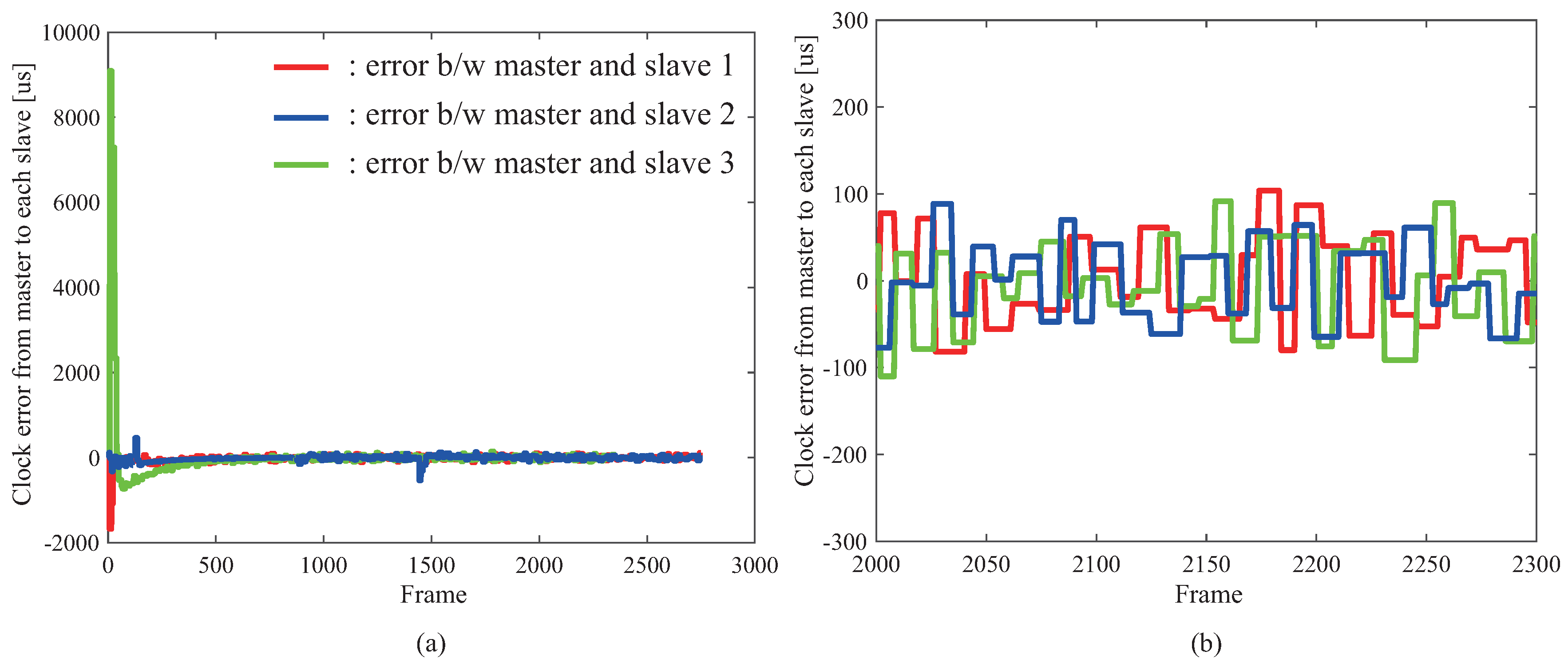
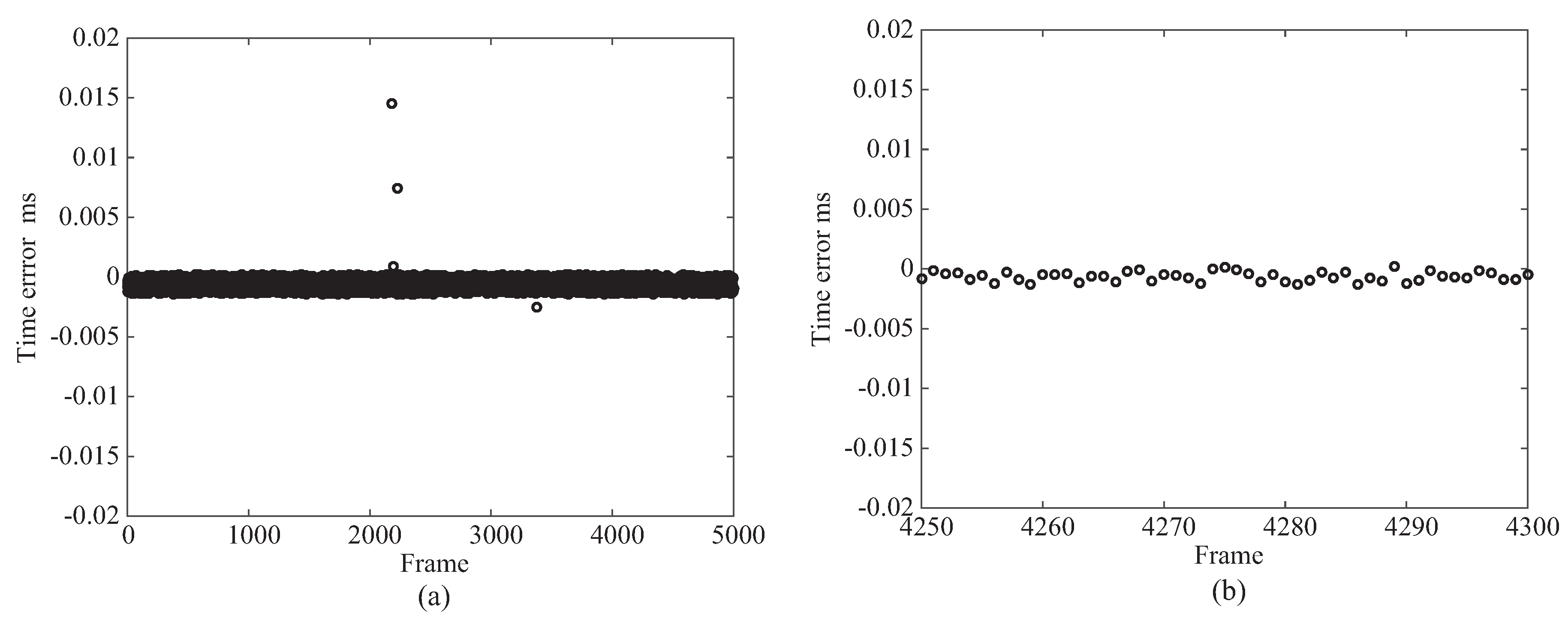
4.1. Accuracy Evaluation of Clock Synchronization
4.2. Result of High-Speed Tactile and Vision Sensor Network System
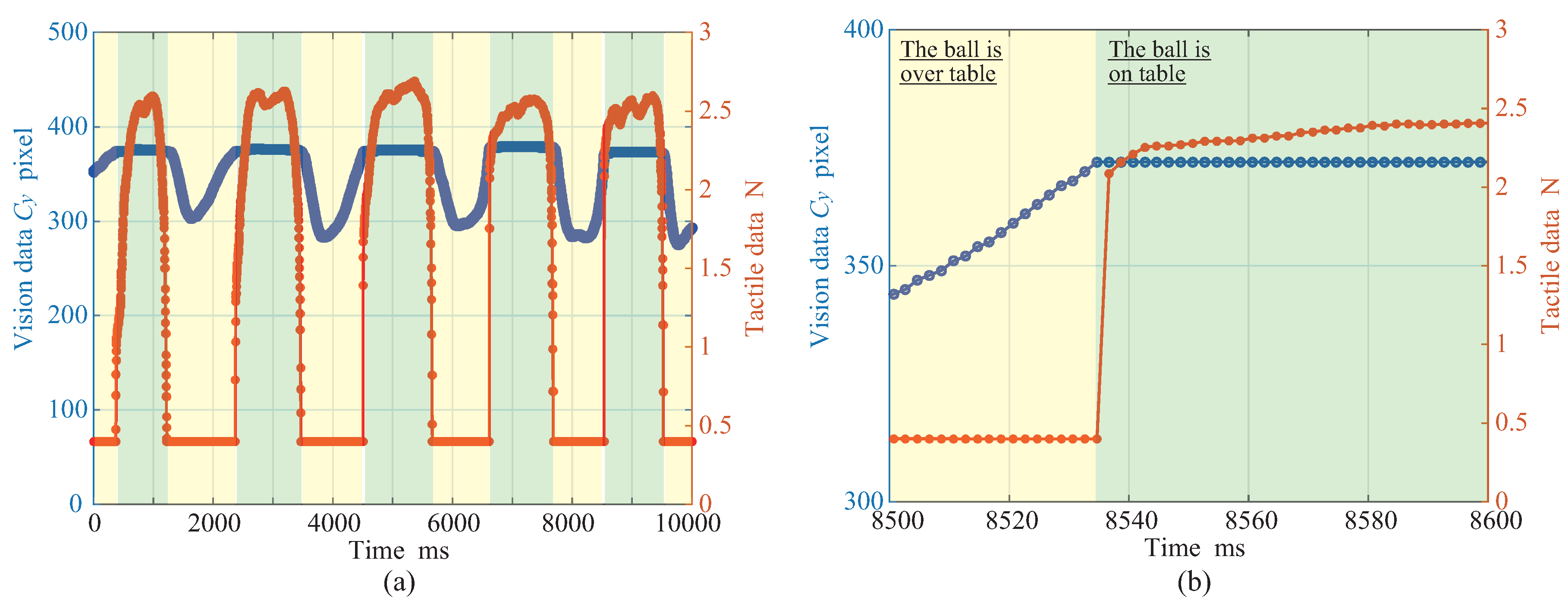
- Experiment 1: A ball is moved above or on a table by a human. If the ball is above the table, the output of the tactile sensor is zero and the ball position is measured by the vision. Meanwhile, if the ball is on the table, the output of the tactile sensor is obtained and the ball position is also measured by the vision.
- Experiment 2: A ball bounces on a table. If the ball touches the table, the impact force is obtained by the tactile sensor. Otherwise, the force is not obtained by the tactile sensor. In both cases, the ball position can be obtained by the vision.
4.2.1. Experiment 1 [14]
4.2.2. Experiment 2
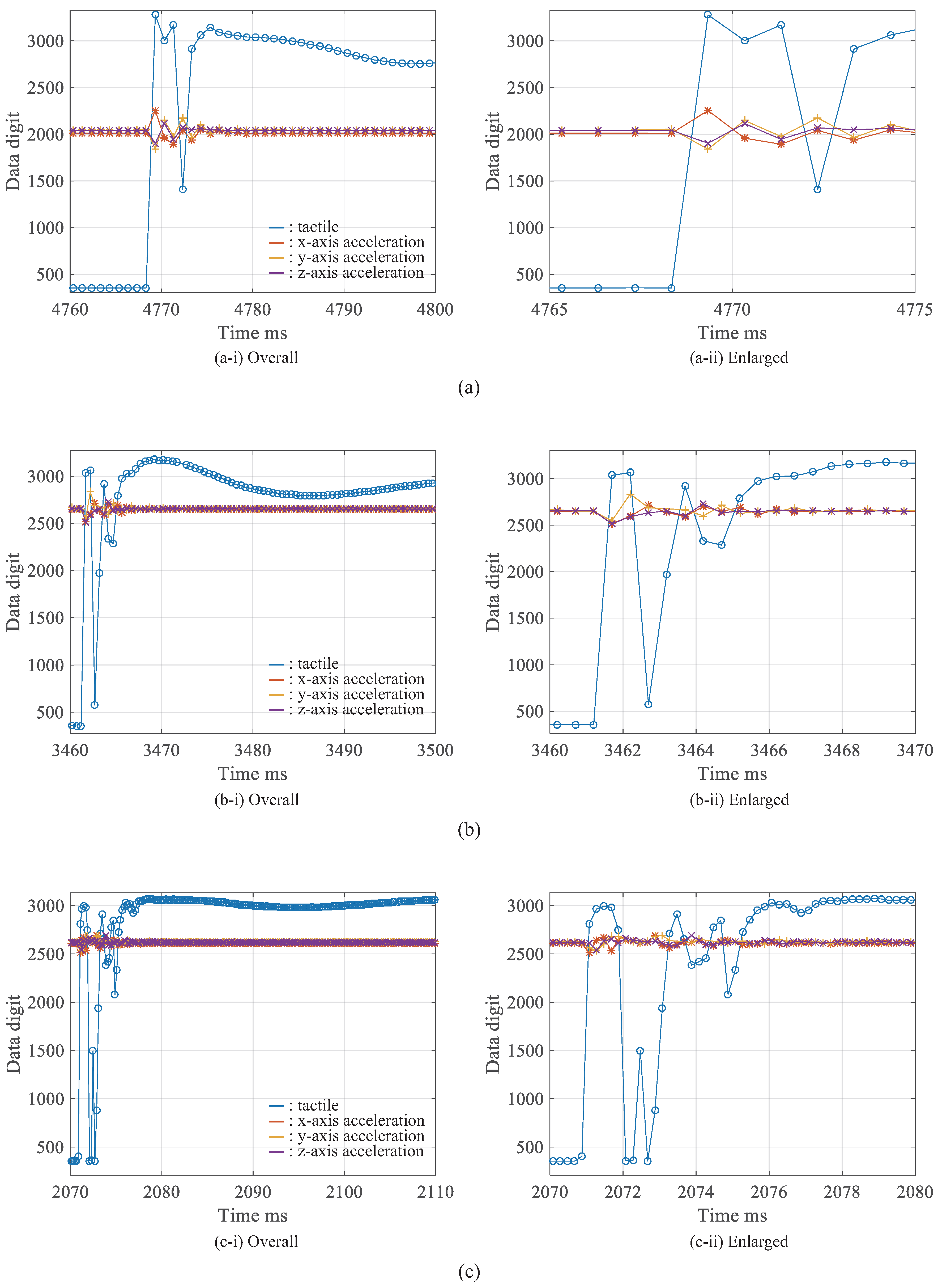
4.3. Result in High-Speed Tactile and Acceleration Sensor Network System
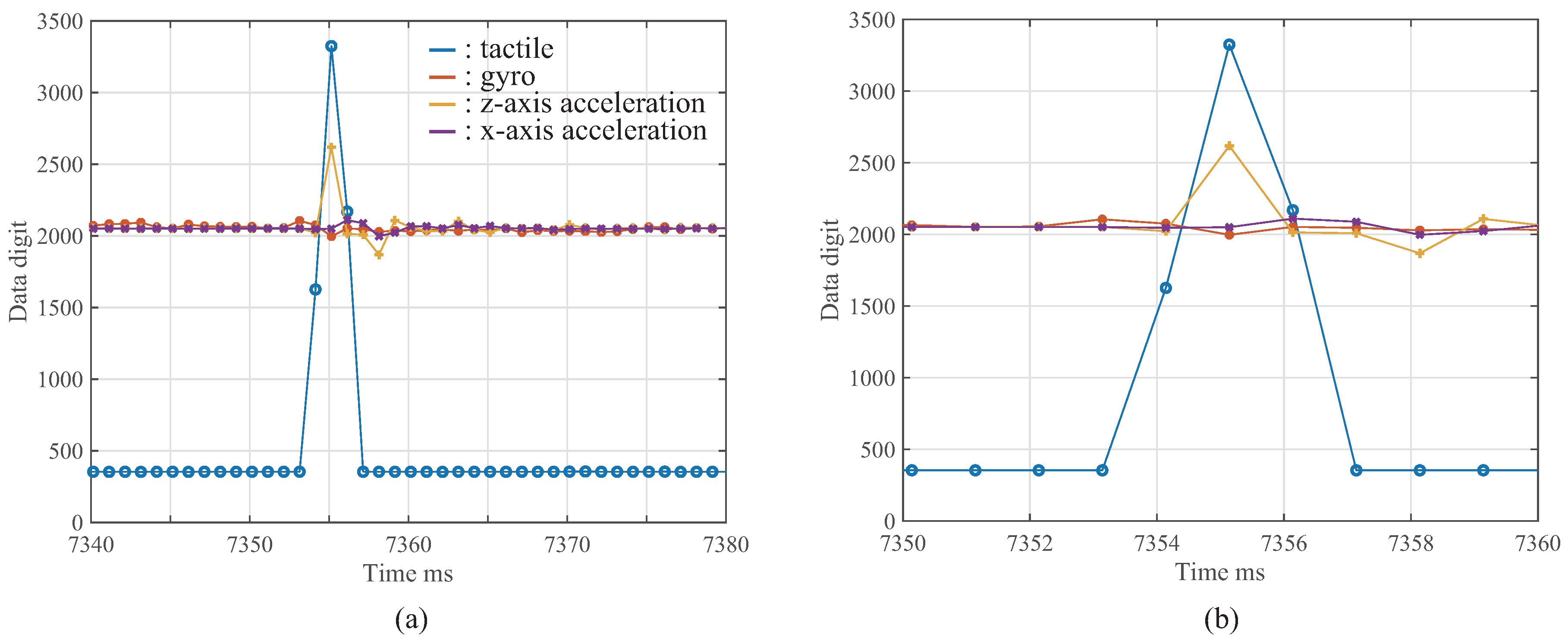
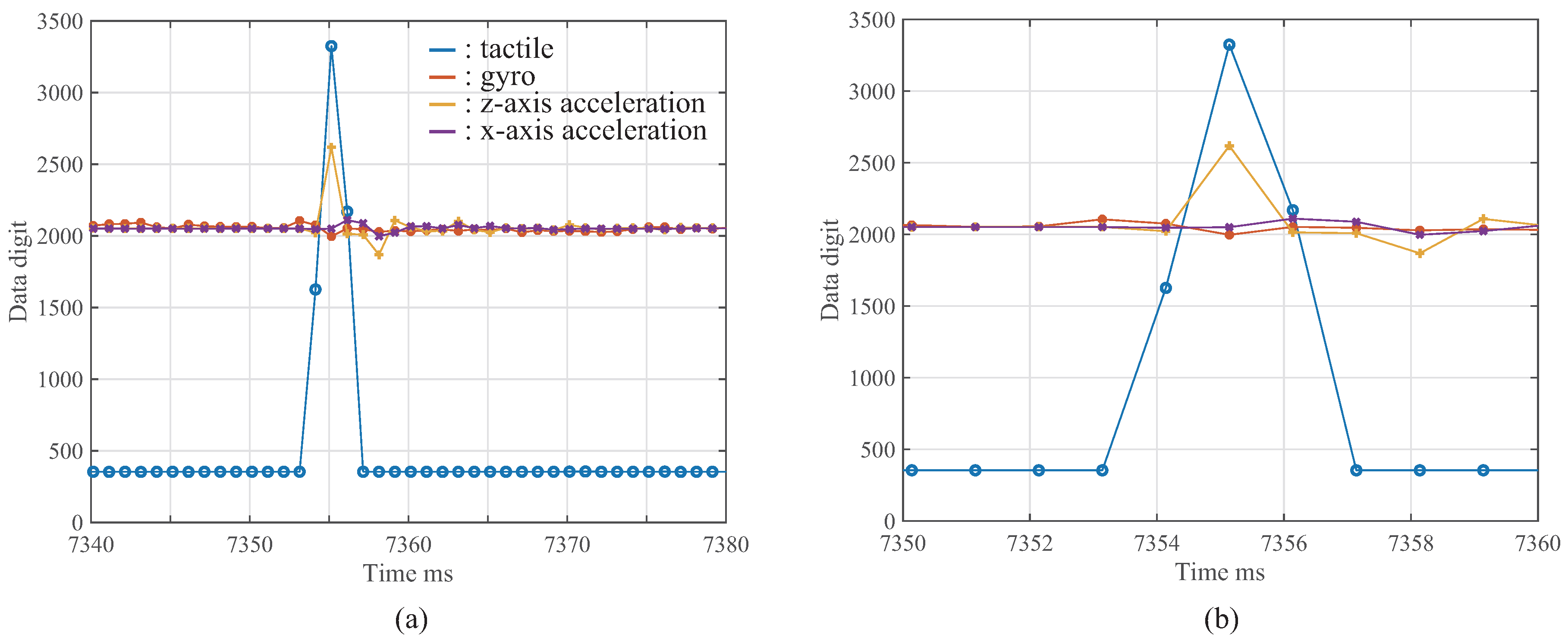
4.4. Result in High-Speed Tactile, Acceleration, and Gyro Sensor Network System
5. Conclusions
5.1. Summary
5.2. Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- D’Andreagiovanni, F.; Nardin, A. Towards the fast and robust optimal design of wireless body area networks. Appl. Soft Comput. 2015, 37, 971–982. [Google Scholar] [CrossRef] [Green Version]
- Natalizio, E.; Loscri, V.; Viterbo, E. Optimal placement of wireless nodes for maximizing path lifetime. IEEE Communun. Lett. 2008, 12, 362–364. [Google Scholar]
- Tsouri, G.; Prieto, A.; Argade, N. On increasing network lifetime in body area networks using global routing with energy consumption balancing. Sensors 2012, 12, 13088–13108. [Google Scholar] [CrossRef] [PubMed]
- Litos, G.; Zabulis, X.; Triantafyllidis, G. Synchronous image acquisition based on network synchronization. In Proceedings of the 2006 Conference on Computer Vision and Pattern Recognition Workshop, New York, NY, USA, 17–22 June 2006; pp. 1–6. [Google Scholar]
- Hou, L.; Kagami, S.; Hashimoto, K. Illumination-based real-time contactless synchronization of high-speed vision sensors. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 22–25 February 2008; pp. 1750–1755. [Google Scholar]
- Nakano, H.; Utani, A.; Miyauchi, A.; Yamamoto, H. Synchronization-Based Data Gathering Scheme Using Chaotic Pulse-Coupled Neural Networks in Wireless Sensor Networks. In Proceedings of the 2008 IEEE International Joint Conference on Neural Networks, Hong Kong, China, 1–8 June 2008; pp. 1115–1121. [Google Scholar]
- Mo, L.; Liu, S.; Gao, R.X.; Freedson, P.S. Energy-efficient and data synchronized body sensor network for physical activity measurement. In Proceedings of the 2013 IEEE International Instrumentation and Measurement Technology Conference, Minneapolis, MN, USA, 6–9 May 2013; pp. 1120–1124. [Google Scholar]
- Ha Tran, T.P.; Yamamoto, H.; Yamazaki, K. Data Synchronization Method in DTN Sensor Network using Autonomous Air Vehicle. In Proceedings of the 16th International Conference on Advanced Communication Technology, PyeongChang, Korea, 16–19 February 2014; pp. 382–387. [Google Scholar]
- Noda, A.; Yamakawa, Y.; Ishikawa, M. Frame Synchronization for Networked High-Speed Vision Systems. In Proceedings of the IEEE SENSORS, Valencia, Spain, 2–5 November 2014; pp. 269–272. [Google Scholar]
- Noda, A.; Yamakawa, Y.; Ishikawa, M. Target Tracking Behind Occlusions Using a Networked High-Speed Vision System. In Proceedings of the IEEE SENSORS, Valencia, Spain, 2–5 November 2014; pp. 2018–2021. [Google Scholar]
- Hirano, M.; Noda, A.; Ishikawa, M.; Yamakawa, Y. Networked high-speed vision for evasive maneuver assist. ICT Express 2017, 3, 178–182. [Google Scholar] [CrossRef]
- Noda, A.; Tabata, T.; Ishikawa, M.; Yamakawa, Y. Synchronized High-Speed Vision Sensor Network for Expansion of Field of View. Sensors 2018, 18, 1276. [Google Scholar] [CrossRef] [PubMed]
- Yamakawa, Y.; Noda, A.; Ishikawa, M.; Shimojo, M. Integration of High-speed Visual and Tactile Sensors with Synchronization in a Sensor Network System. In Proceedings of the IEEE SENSORS 2016, Orlando, FL, USA, 30 October–2 November 2016; pp. 1703–1705. [Google Scholar]
- Matsui, Y.; Noda, A.; Yamakawa, Y.; Ishikawa, M. Development of a high-speed sensor network system with multiple sensors using simultaneous clock synchronizations. In Proceedings of the SICE Annual Conference 2017, Kanazawa, Japan, 19–22 September 2017; pp. 1595–1596. [Google Scholar]
- Yamakawa Laboratory. Available online: http://www.hfr.iis.u-tokyo.ac.jp/index-e.html (accessed on 22 April 2018).
- Ishikawa Senoo Laboratory. Available online: http://www.k2.t.u-tokyo.ac.jp/fusion/index-e.html (accessed on 22 April 2018).
- Senoo, T.; Namiki, A.; Ishikawa, M. Ball Control in High-speed Batting Motion using Hybrid Trajectory Generator. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 1762–1767. [Google Scholar]
- Yamakawa, Y.; Namiki, A.; Ishikawa, M. Motion Planning for Dynamic Folding of a Cloth with Two High-speed Robot Hands and Two High-speed Sliders. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5486–5491. [Google Scholar]
- Huang, S.; Shinya, K.; Bergström, N.; Yamakawa, Y.; Yamazaki, T.; Ishikawa, M. Towards Flexible Manufacturing: Dynamic Compensation Robot with a New High-speed Vision System. Int. J. Adv. Manuf. Technol. 2018, 95, 4523–4533. [Google Scholar] [CrossRef]
- Murakami, K.; Yamakawa, Y.; Senoo, T.; Ishikawa, M. Motion Planning for Catching a Light-weight Ball with High-speed Visual Feedback. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics, Zhuhai, China, 6–9 December 2015; pp. 339–344. [Google Scholar]
- Tamada, T.; Ikarashi, W.; Yoneyama, D.; Tanaka, K.; Yamakawa, Y.; Senoo, T.; Ishikawa, M. High-speed Bipedal Robot Running Using High-speed Visual Feedback. In Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 140–145. [Google Scholar]
- IEEE Standards Association. IEEE 1588 Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems; IEEE Standards Association: Piscataway, NJ, USA, 2008. [Google Scholar]
- Available online: http://ptpd.sourceforge.net/ (accessed on 21 April 2018).
- Ishikawa, M.; Shimojo, M. A Method for Measuring the Center Position of a Two Dimensional Distributed Load Using Pressure-Conductive Rubber. Trans. Soc. Instrum. Control Eng. 1982, 18, 730–735. (In Japanese) [Google Scholar] [CrossRef] [Green Version]
- Shimojo, M.; Namiki, A.; Ishikawa, M.; Makino, R.; Mabuchi, K. A tactile sensor sheet using pressure conductive rubber with electrical-wires stitched method. IEEE Trans. Sens. 2004, 4, 589–596. [Google Scholar] [CrossRef]
- Wei, Y.-H.; Leng, Q.; Han, S.; Mok, A.K.; Zhang, W.; Tomizuka, M. RT-WiFi: Real-Time High-Speed Communication Protocol for Wireless Cyber-Physical Control Applications. In Proceedings of the IEEE Real-Time Systems Symposium, Vancouver, BC, Canada, 3–6 December 2013; pp. 140–149. [Google Scholar]
- Zhang, W.; Tomizuka, M.; Wei, Y.-H.; Leng, Q.; Han, S.; Mok, A.K. Time Delay Compensation in a Wireless Tracking Control System with Previewed Reference. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 3293–3298. [Google Scholar]







© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yamakawa, Y.; Matsui, Y.; Noda, A.; Ishikawa, M.; Shimojo, M. Development of a Sensor Network System with High Sampling Rate Based on Highly Accurate Simultaneous Synchronization of Clock and Data Acquisition and Experimental Verification †. Micromachines 2018, 9, 325. https://doi.org/10.3390/mi9070325
Yamakawa Y, Matsui Y, Noda A, Ishikawa M, Shimojo M. Development of a Sensor Network System with High Sampling Rate Based on Highly Accurate Simultaneous Synchronization of Clock and Data Acquisition and Experimental Verification †. Micromachines. 2018; 9(7):325. https://doi.org/10.3390/mi9070325
Chicago/Turabian StyleYamakawa, Yuji, Yutaro Matsui, Akihito Noda, Masatoshi Ishikawa, and Makoto Shimojo. 2018. "Development of a Sensor Network System with High Sampling Rate Based on Highly Accurate Simultaneous Synchronization of Clock and Data Acquisition and Experimental Verification †" Micromachines 9, no. 7: 325. https://doi.org/10.3390/mi9070325