Updated Tactile Feedback with a Pin Array Matrix Helps Blind People to Reduce Self-Location Errors

 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Programmable Tactile Display
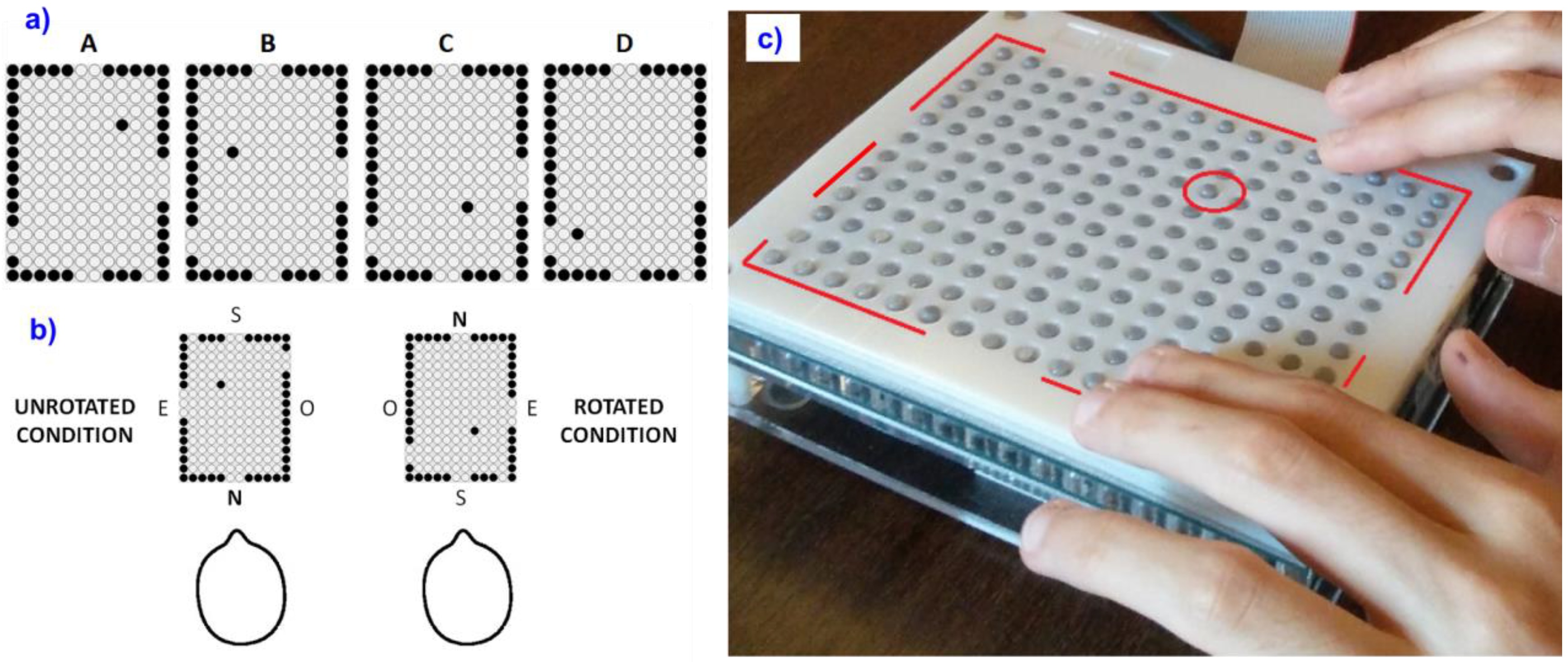
2.3. Stimuli
2.4. Map Reconstruction
2.5. Map Comprehension Questionnaire (MCQ)
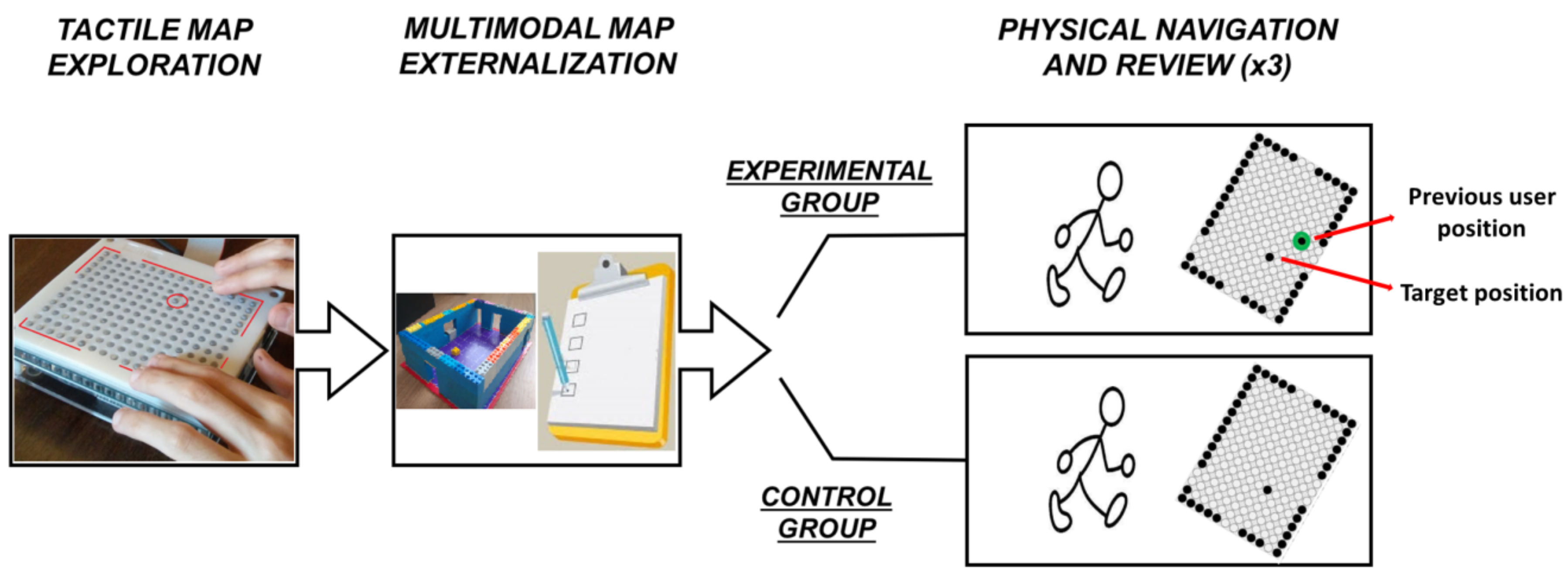
2.6. Procedure
2.7. Statistical Analyses
3. Results
3.1. Multimodal Map Externalization
3.1.1. Map Reconstruction
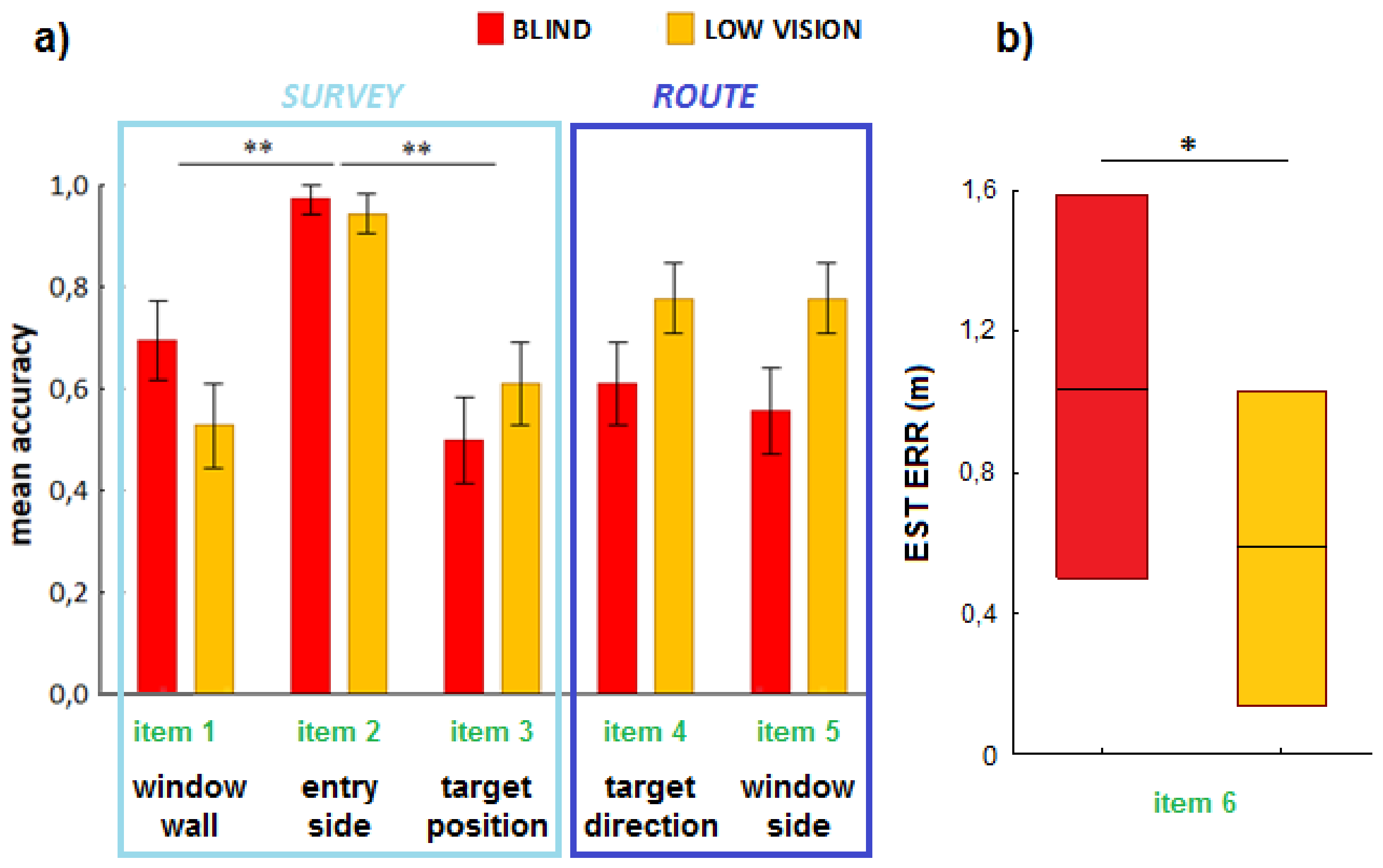
3.1.2. Map Comprehension Questionnaire
3.1.3. Correlation between Map Reconstruction and MCQ
3.2. Physical Navigation and Review Task
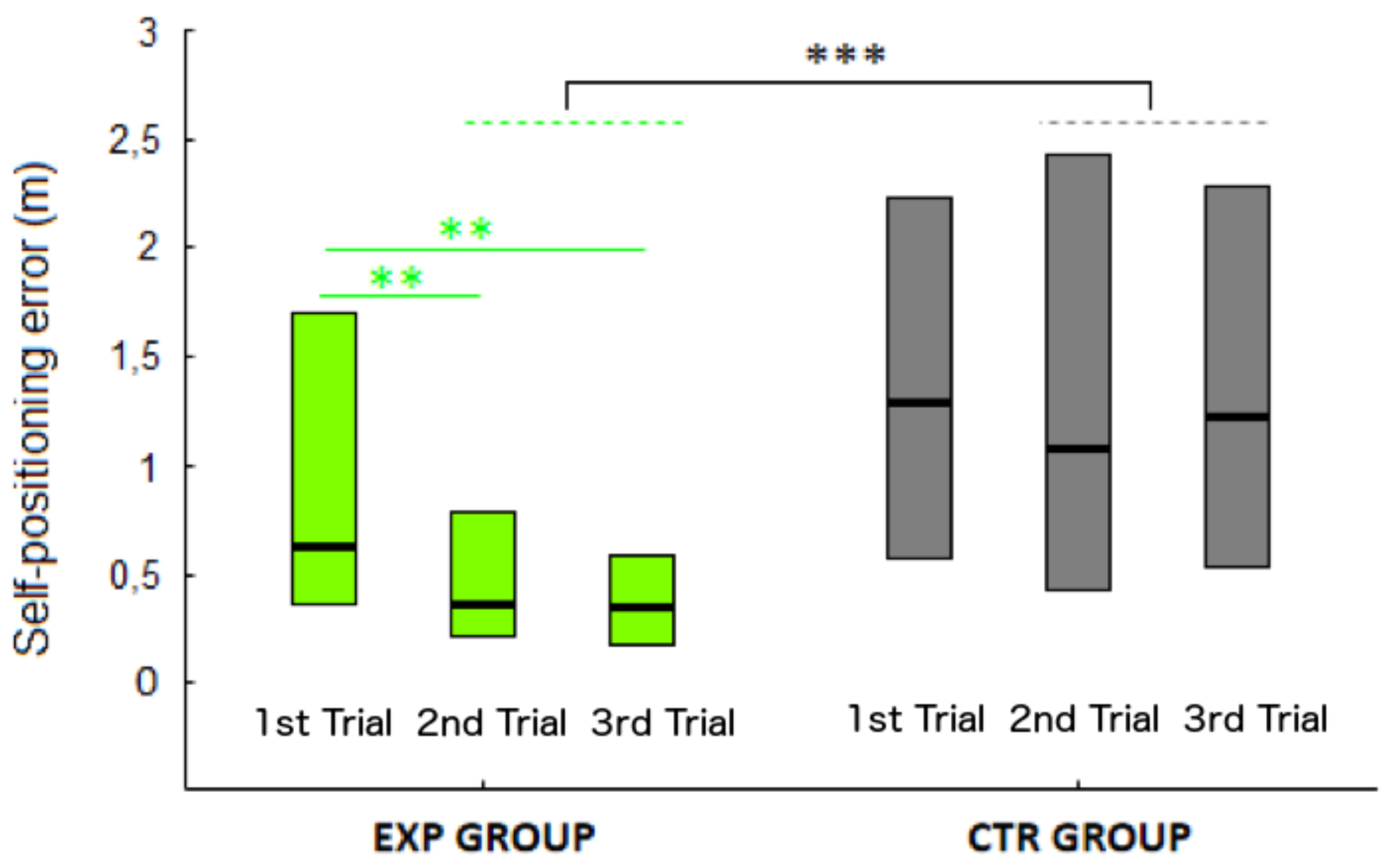
3.2.1. Self-Positioning Errors in Navigation
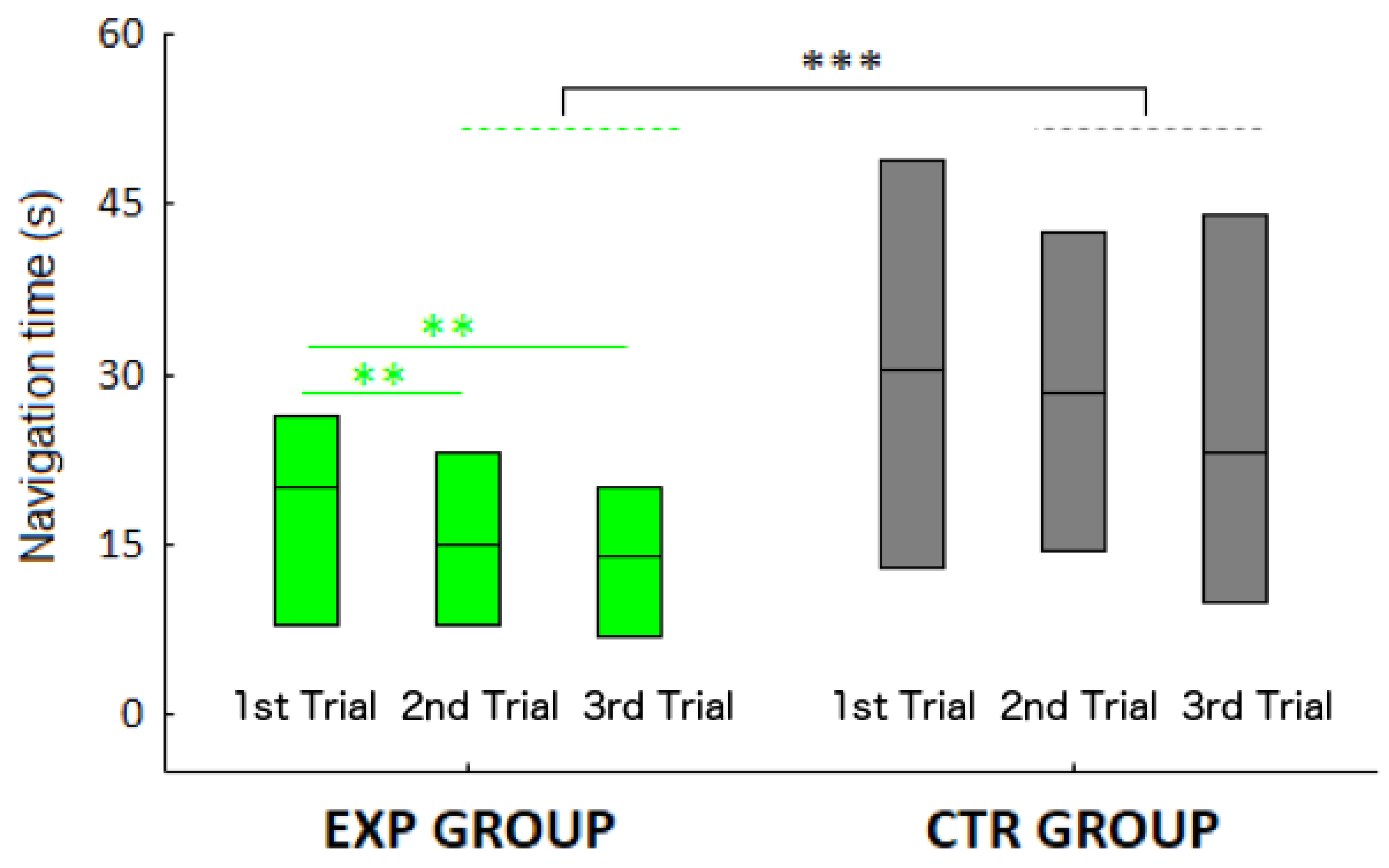
3.2.2. Navigation Time
3.2.3. Correlations of Self-Positioning Errors with Measures of Externalization
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Map Reconstruction Task and Room Description

- Good morning. I will now describe the room. The room has a rectangular shape. It is 6 m × 4.5 m. Inside there are three big wooden doors, a small door and a wide window. The three doors and the small door are covered by fabric.
- [Rotated condition] The North side of the map lies at the top of the device. [Alternatively, Unrotated condition] The North side of the map lies at the bottom of the device.
- On a 4.5 m long side, to the North, there is a big wooden door. On a 6 m long side, to the East, there is a wide window. On a 4.5 m long side, to the South, there is a big wooden door. On the same side, in the Southeast corner, there is a small door. On a 6 m long side, to the West, in the Southwest corner, there is a big wooden door.
- Inside the room there is a square. The position of the square indicates where you will have to place the object. You will enter through the North side.
References
- Siegel, A.W.; White, S.H. The Development of Spatial Representations of Large-Scale Environments. Adv. Child. Dev. Behav. 1975, 10, 9–55. [Google Scholar] [PubMed]
- Tolman, E.C. Cognitive Maps in Rats and Men. Psychol. Rev. 1948, 55, 189–208. [Google Scholar] [CrossRef] [PubMed]
- Strelow, E.R. What Is Needed for a Theory of Mobility: Direct Perceptions and Cognitive Maps—Lessons from the Blind. Psychol. Rev. 1985, 92, 226–248. [Google Scholar] [CrossRef] [PubMed]
- McNaughton, B.L.; Chen, L.L.; Markus, E.J. “Dead Reckoning,” Landmark Learning, and the Sense of Direction: A Neurophysiological and Computational Hypothesis. J. Cogn. Neurosci. 1991, 3, 190–202. [Google Scholar] [CrossRef] [PubMed]
- Colgin, L.L.; Moser, E.I.; Moser, M.-B. Understanding Memory through Hippocampal Remapping. Trends Neurosci. 2008, 31, 469–477. [Google Scholar] [CrossRef] [PubMed]
- Loomis, J.M.; Klatzky, R.L.; Golledge, R.G.; Cicinelli, J.G.; Pellegrino, J.W.; Phyllis, F.A. Nonvisual Navigatoin by Blind and Sighted: Assessment of Path Integration Ability. J. Exp. Psychol. Gen. 1993, 122, 73–91. [Google Scholar] [CrossRef] [PubMed]
- Thinus-Blanc, C.; Gaunet, F. Representation of Space in Blind Persons: Vision as a Spatial Sense? Psychol. Bull. 1997, 121, 20–42. [Google Scholar] [CrossRef] [PubMed]
- Pasqualotto, A.; Proulx, M.J. The Role of Visual Experience for the Neural Basis of Spatial Cognition. Neurosci. Biobehav. Rev. 2012, 36, 1179–1187. [Google Scholar] [CrossRef] [PubMed]
- Millar, S. Understanding and Representing Space: Theory and Evidence From Studies with Blind and Sighted Children; Oxford University Press: Lincoln, UK, 1994. [Google Scholar]
- Noordzij, M.L.; Zuidhoek, S.; Postma, A. The Influence of Visual Experience on the Ability to Form Spatial Mental Models Based on Route and Survey Descriptions. Cognition 2006, 100, 321–342. [Google Scholar] [CrossRef] [PubMed]
- Taylor, H.A.; Tversky, B. Spatial Mental Models Derived from Survey and Route Descriptions. J. Mem. Lang. 1992, 31, 261–292. [Google Scholar] [CrossRef]
- Lawton, C.A. Gender Differences in Way-Finding Strategies: Relationship to Spatial Ability and Spatial Anxiety. Sex Roles 1994, 30, 765–779. [Google Scholar] [CrossRef]
- Millar, S. Self-Referent and Movement Cues in Coding Spatial Location by Blind and Sighted Children. Perception 1981, 10, 255–264. [Google Scholar] [CrossRef] [PubMed]
- Millar, S. Crossmodal and Intersensory Perception and the Blind. In Intersensory Perception and Sensory Integration; Springer: Boston, MA, USA, 1981; pp. 281–314. [Google Scholar]
- Millar, S. Models of Sensory Deprivation: The Nature/Nurture Dichotomy and Spatial Representation in the Blind. Int. J. Behav. Dev. 1988, 11, 69–87. [Google Scholar] [CrossRef]
- Meneghetti, C.; Pazzaglia, F.; De Beni, R. Spatial Mental Representations Derived from Survey and Route Descriptions: When Individuals Prefer Extrinsic Frame of Reference. Learn. Individ. Differ. 2011, 21, 150–157. [Google Scholar] [CrossRef]
- Schmidt, S.; Tinti, C.; Fantino, M.; Mammarella, I.C.; Cornoldi, C. Spatial Representations in Blind People: The Role of Strategies and Mobility Skills. Acta Psychol. 2013, 142, 43–50. [Google Scholar] [CrossRef] [PubMed]
- Gaunet, F.; Rossetti, Y. Effects of Visual Deprivation on Space Representation: Immediate and Delayed Pointing toward Memorised Proprioceptive Targets. Perception 2006, 35, 107–124. [Google Scholar] [CrossRef] [PubMed]
- Pasqualotto, A.; Spiller, M.J.; Jansari, A.S.; Proulx, M.J. Visual Experience Facilitates Allocentric Spatial Representation. Behav. Brain Res. 2013, 236, 175–179. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chiesa, S.; Schmidt, S.; Tinti, C.; Cornoldi, C. Allocentric and Contra-Aligned Spatial Representations of a Town Environment in Blind People. Acta Psychol. 2017, 180, 8–15. [Google Scholar] [CrossRef] [PubMed]
- Morrongiello, B.A.; Timney, B.; Humphrey, G.K.; Anderson, S.; Skory, C. Spatial Knowledge in Blind and Sighted Children. J. Exp. Child Psychol. 1995, 59, 211–233. [Google Scholar] [CrossRef] [PubMed]
- Tinti, C.; Adenzato, M.; Tamietto, M.; Cornoldi, C. Visual Experience Is Not Necessary for Efficient Survey Spatial Cognition: Evidence from Blindness. Q. J. Exp. Psychol. 2006, 59, 1306–1328. [Google Scholar] [CrossRef] [PubMed]
- Gaunet, F.; Ittyerah, M.; Rossetti, Y. Pointing at Targets by Children with Congenital and Transient Blindness. Exp. Brain Res. 2007, 178, 167–179. [Google Scholar] [CrossRef] [PubMed]
- Ittyerah, M.; Gaunet, F.; Rossetti, Y. Pointing with the Left and Right Hands in Congenitally Blind Children. Brain Cogn. 2007, 64, 170–183. [Google Scholar] [CrossRef] [PubMed]
- Postma, A.; Zuidhoek, S.; Noordzij, M.L.; Kappers, A.M.L. Differences between early blind, late blind and blindfolded sighted people in haptic spatial configuration learning and resulting memory traces. Perception 2007, 36, 1253–1265. [Google Scholar] [CrossRef] [PubMed]
- Ernest, C.H. Imagery and Memory in the Blind: A Review. In Imagery and Related Mnemonic Processes; Springer: New York, NY, USA, 1987; pp. 218–238. [Google Scholar]
- Haber, R.N.; Haber, L.R.; Levin, C.A.; Hollyfield, R. Properties of Spatial Representations: Data from Sighted and Blind Subjects. Percept. Psychophys. 1993, 54, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Haber, L.; Haber, R.N.; Penningroth, S.; Novak, K.; Radgowski, H. Comparison of Nine Methods of Indicating the Direction to Objects: Data from Blind Adults. Perception 1993, 22, 35–47. [Google Scholar] [CrossRef] [PubMed]
- Szubielska, M. Strategies for Constructing Spatial Representations Used By Blind and Sighted Subjects. Stud. Psychol. 2014, 56, 273–286. [Google Scholar] [CrossRef]
- Golledge, R.G. Tactual Strip Maps as Navigational Aids. J. Vis. Impair. Blind. 1991, 85, 296–301. [Google Scholar]
- Ungar, S.; Blades, M.; Spencer, C. The Role of Tactile Maps in Mobility Training. Br. J. Vis. Impair. 1993, 11, 59–61. [Google Scholar] [CrossRef]
- Cattaneo, Z.; Vecchi, T.; Cornoldi, C.; Mammarella, I.; Bonino, D.; Ricciardi, E.; Pietrini, P. Imagery and Spatial Processes in Blindness and Visual Impairment. Neurosci. Biobehav. Rev. 2008, 32, 1346–1360. [Google Scholar] [CrossRef] [PubMed]
- Ungar, S.; Blades, M.; Spencer, C.; Morsley, K. Can Visually Impaired Children Use Tactile Maps to Estimate Directions? J. Vis. Impair. Blind. 1994, 88, 221–233. [Google Scholar]
- Ungar, S.; Blades, M.; Spencer, C. Teaching Visually Impaired Children to Make Distance Judgments from a Tactile Map. J. Vis. Impair. Blind. 1997, 91, 163–174. [Google Scholar]
- Ungar, S.; Blades, M.; Spencer, C. The Construction of Cognitive Maps by Children with Visual Impairment. Constr. Cogn. maps 1996, 32, 247–273. [Google Scholar]
- Brambring, M.; Weber, C. Tactual, Verbal and Exploratory Information for Geographic Orientation of the Blind. Z. Exp. Angew. Psychol. 1981, 28, 23–37. [Google Scholar]
- Papadopoulos, K.; Koustriava, E.; Koukourikos, P. Orientation and mobility aids for individuals with blindness: Verbal description vs. audio-tactile map. Assist. Technol. 2017, 29. [Google Scholar] [CrossRef] [PubMed]
- Cattaneo, Z.; Vecchi, T. Blind Vision: The Neuroscience of Visual Impairment; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Leo, F.; Cocchi, E.; Brayda, L. The Effect of Programmable Tactile Displays on Spatial Learning Skills in Children and Adolescents of Different Visual Disability. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 861–872. [Google Scholar] [CrossRef] [PubMed]
- Brock, A.M.; Truillet, P.; Oriola, B.; Picard, D.; Jouffrais, C. Interactivity Improves Usability of Geographic Maps for Visually Impaired People. Hum. Comput. Interact. 2015, 30, 156–194. [Google Scholar] [CrossRef] [Green Version]
- Ducasse, J.; Brock, A.M.; Jouffrais, C. Accessible Interactive Maps for Visually Impaired Users. In Mobility of Visually Impaired People; Springer International Publishing: Cham, Switzerland, 2018; pp. 537–584. [Google Scholar]
- Ducasse, J.; Macé, M.; Jouffrais, C. From Open Geographical Data to Tangible Maps: Improving the Accessibility of Maps for Visually Impaired People. Proceedings of GeoVIS'15-ISPRS Geospatial Week, La Grande Motte, France, 1 October 2015; pp. 517–523. [Google Scholar]
- Brayda, L.; Campus, C.; Memeo, M.; Lucagrossi, L. The Importance of Visual Experience, Gender and Emotion in the Assessment of an Assistive Tactile Mouse. IEEE Trans. Haptic. 2015, 8, 279–286. [Google Scholar] [CrossRef] [PubMed]
- Rastogi, R.; Pawluk, T.V.D.; Ketchum, J. Intuitive Tactile Zooming for Graphics Accessed by Individuals Who Are Blind and Visually Impaired. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 655–663. [Google Scholar] [CrossRef] [PubMed]
- Herman, J.F.; Chatman, S.P.; Roth, S.F. Cognitive Mapping in Blind People: Acquisition of Spatial Relationships in a Large-Scale Environment. J. Vis. Impair. Blind. 1983, 77, 161–166. [Google Scholar]
- Holmes, E.; Jansson, G.; Jansson, A. Exploring Auditorily Enhanced Tactile Maps for Travel in New Environments. In Assistive Technology for Visually Impaired and Blind People; Hersh, M., Johnson, M.A., Eds.; Springer: Cham, Switzerland, 1996; pp. 191–196. [Google Scholar]
- Pissaloux, E.E.; Velazquez, R.; Maingreaud, F. A New Framework for Cognitive Mobility of Visually Impaired Users in Using Tactile Device. IEEE Trans. Hum. Mach. Syst. 2017, 47, 1040–1051. [Google Scholar] [CrossRef]
- Zeng, L.; Weber, G. Exploration of Location-Aware You-Are-Here Maps on a Pin-Matrix Display. IEEE Trans. Hum. Mach. Syst. 2016, 46, 88–100. [Google Scholar] [CrossRef]
- O’Modhrain, S.; Giudice, N.A.; Gardner, J.A.; Legge, G.E. Designing Media for Visually-Impaired Users of Refreshable Touch Displays: Possibilities and Pitfalls. IEEE Trans. Haptic. 2015, 8, 248–257. [Google Scholar] [CrossRef] [PubMed]
- Ivanchev, M.; Zinke, F.; Lucke, U. Pre-Journey Visualization of Travel Routes for the Blind on Refreshable Interactive Tactile Displays. In International Conference on Computers for Handicapped Persons; Springer: Cham, Switzerland, 2014; pp. 81–88. [Google Scholar]
- Velazquez, R.; Fontaine, E.; Pissaloux, E. Coding the Environment in Tactile Maps for Real-Time Guidance of the Visually Impaired. Proceedings of 2006 IEEE International Symposium on MicroNanoMechanical and Human Science, Nagoya, Japan, 5–8 November 2006; pp. 1–6. [Google Scholar]
- Kitchin, R.M.; Jacobson, R.D. Techniques to Collect and Analyze the Cognitive Map Knowledge of Persons with Visual Impairment or Blindness: Issues of Validity. J. Vis. Impair. Blind. 1997, 91, 360–376. [Google Scholar]
- Miao, M.; Zeng, L.; Weber, G. Externalizing Cognitive Maps via Map Reconstruction and Verbal Description. Univers. Access. Inf. Soc. 2017, 16, 667–680. [Google Scholar] [CrossRef]
- Zarate, J.J.; Shea, H. Using Pot-Magnets to Enable Stable and Scalable Electromagnetic Tactile Displays. IEEE Trans. Haptic. 2017, 10, 106–112. [Google Scholar] [CrossRef] [PubMed]
- Besse, N.; Rosset, S.; Zárate, J.J.; Ferrari, E.; Brayda, L.; Shea, H. Understanding graphics on a scalable latching assistive haptic display using a shape memory polymer membrane. IEEE Transactions on Haptics 2018, 11, 30–38. [Google Scholar] [CrossRef] [PubMed]
- Tonelli, A.; Gori, M.; Brayda, L. The Influence of Tactile Cognitive Maps on Auditory Space Perception in Sighted Persons. Front. Psychol. 2016, 7, 1683. [Google Scholar] [CrossRef] [PubMed]
- Meyers, E.; Ethington, D.; Ashcroft, S. Readability of Braille as a function of three spacing variables. J. Appl. Psychol. 1958, 42, 163. [Google Scholar] [CrossRef]
- Louw, S.; Kappers, A.M.L.; Koenderink, J.J. Active haptic detection and discrimination of shape. Percept. Psychophys. 2002, 64, 1108–1119. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zarate, J.J.; Gudozhnik, O.; Ruch, A.S.; Shea, H. Keep in Touch: Portable Haptic Display with 192 High Speed Taxels. In Proceedings of the 2017 CHI Conference Extended Abstracts on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 349–352. [Google Scholar]
- Cakit, E.; Durgun, B.; Cetik, O.; Yoldas, O. A survey of hand anthropometry and biomechanical measurements of dentistry students in Turkey. Hum. Factors Ergon. Manuf. Serv. Ind. 2014, 24, 739–753. [Google Scholar] [CrossRef]
- Benjamini, Y.; Hochberg, Y. Controlling the False Discovery Rate: A Practical and Powerful Approach to Multiple Testing. J. R. Stat. Soc. B (Methodological) 1995, 57, 289–300. [Google Scholar]
- Glickman, M.E.; Rao, S.R.; Schultz, M.R. False Discovery Rate Control Is a Recommended Alternative to Bonferroni-Type Adjustments in Health Studies. J. Clin. Epidemiol. 2014, 67, 850–857. [Google Scholar] [CrossRef] [PubMed]
- Cardin, S.; Thalmann, D.; Vexo, F. A Wearable System for Mobility Improvement of Visually Impaired People. Vis. Comput. 2007, 23, 109–118. [Google Scholar] [CrossRef]
- Yatani, K.; Banovic, N.; Truong, K. SpaceSense: Representing Geographical Information to Visually Impaired People Using Spatial Tactile Feedback. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Austin, TX, USA, 5–10 May 2012; pp. 415–424. [Google Scholar]
- Jacobson, W.H. The Art and Science of Teaching Orientation and Mobility to Persons with Visual Impairments; AFB Press: New York, NY, USA, 1993. [Google Scholar]
- Jordan, K.; Schadow, J.; Wuestenberg, T.; Heinze, H.-J.; Jäncke, L. Different Cortical Activations for Subjects Using Allocentric or Egocentric Strategies in a Virtual Navigation Task. Neuroreport 2004, 15, 135–140. [Google Scholar] [CrossRef]
- Shepard, R.N.; Metzler, J. Mental Rotation of Three-Dimensional Objects. Science 1971, 171, 701–703. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marmor, G.S.; Zaback, L.A. Mental Rotation by the Blind: Does Mental Rotation Depend on Visual Imagery? J. Exp. Psychol. Hum. Percept. Perform. 1976, 2, 515–521. [Google Scholar] [CrossRef] [PubMed]
- Foo, P.; Warren, W.H.; Duchon, A.; Tarr, M.J. Do Humans Integrate Routes Into a Cognitive Map? Map-Versus Landmark-Based Navigation of Novel Shortcuts. J. Exp. Psychol. Learn. Mem. Cogn. 2005, 31, 195–215. [Google Scholar] [CrossRef] [PubMed]
- Lahav, O.; Mioduser, D. Exploration of Unknown Spaces by People Who Are Blind Using a Multi-Sensory Virtual Environment. J. Spec. Educ. Technol. 2004, 19, 15–23. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PAM Characteristics | Standard Braille [57] | BlindPAD | LEGO |
|---|---|---|---|
| Dot diameter | 1.52 mm | 4 mm | 4.8 mm |
| Dot spacing (center-to-center) | 2.54 mm | 8 mm | 8 mm |
| Stroke (displacement) | 0.6 mm | 0.55 mm | 1.8 mm |
| Diameter/spacing ratio | 0.6 | 0.5 | 0.6 |
| Map Comprehension Questionnaire (MCQ) | ||
|---|---|---|
| Item 1 | Which side has the window? | |
| Survey items | Item 2 | Which side hosts the entrance? |
| Item 3 | Where is the virtual target? | |
| Item 4 | Which direction you should walk to reach the target? | |
| Route items | Item 5 | On which side you will find the window from the entrance? |
| Item 6 | How distant is the virtual target from the entrance? (in meters) | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brayda, L.; Leo, F.; Baccelliere, C.; Ferrari, E.; Vigini, C. Updated Tactile Feedback with a Pin Array Matrix Helps Blind People to Reduce Self-Location Errors. Micromachines 2018, 9, 351. https://doi.org/10.3390/mi9070351
Brayda L, Leo F, Baccelliere C, Ferrari E, Vigini C. Updated Tactile Feedback with a Pin Array Matrix Helps Blind People to Reduce Self-Location Errors. Micromachines. 2018; 9(7):351. https://doi.org/10.3390/mi9070351
Chicago/Turabian StyleBrayda, Luca, Fabrizio Leo, Caterina Baccelliere, Elisabetta Ferrari, and Claudia Vigini. 2018. "Updated Tactile Feedback with a Pin Array Matrix Helps Blind People to Reduce Self-Location Errors" Micromachines 9, no. 7: 351. https://doi.org/10.3390/mi9070351