


Detection of Bagworm Infestation Area in Oil Palm Plantation Based on UAV Remote Sensing Using Machine Learning Approach

 , , , ,
, , , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Overview
2.2. Data Collection
2.3. UAV Image Acquisition and Processing
2.4. Classification Model
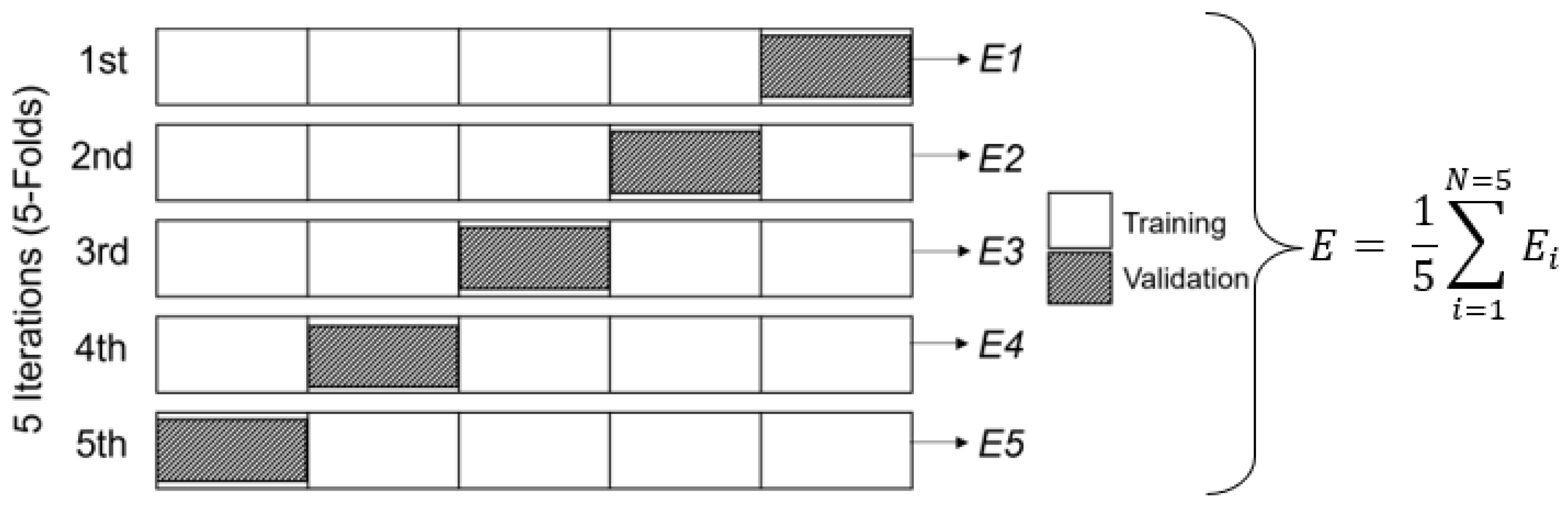
2.5. Performance Evaluation
3. Results
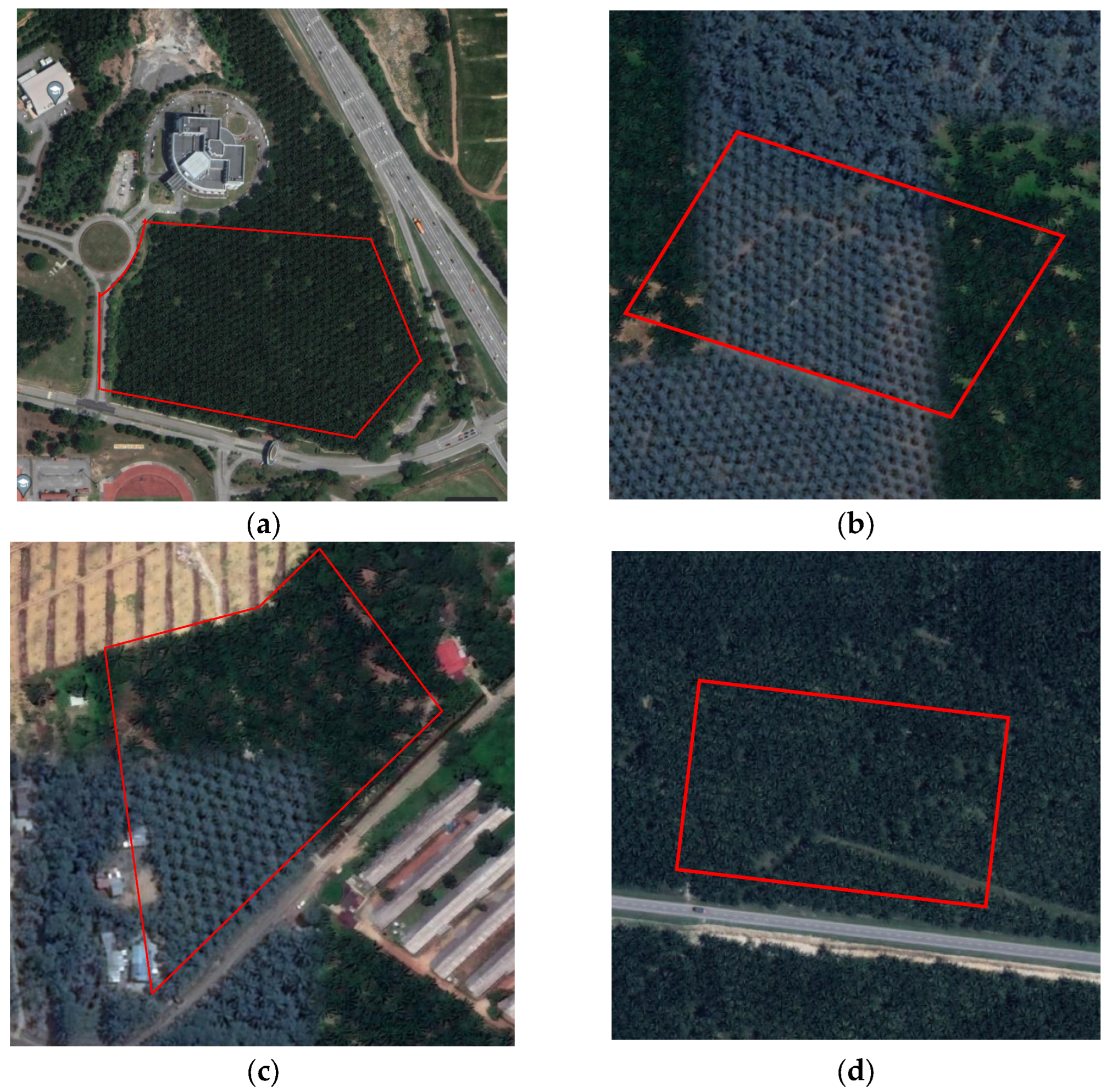
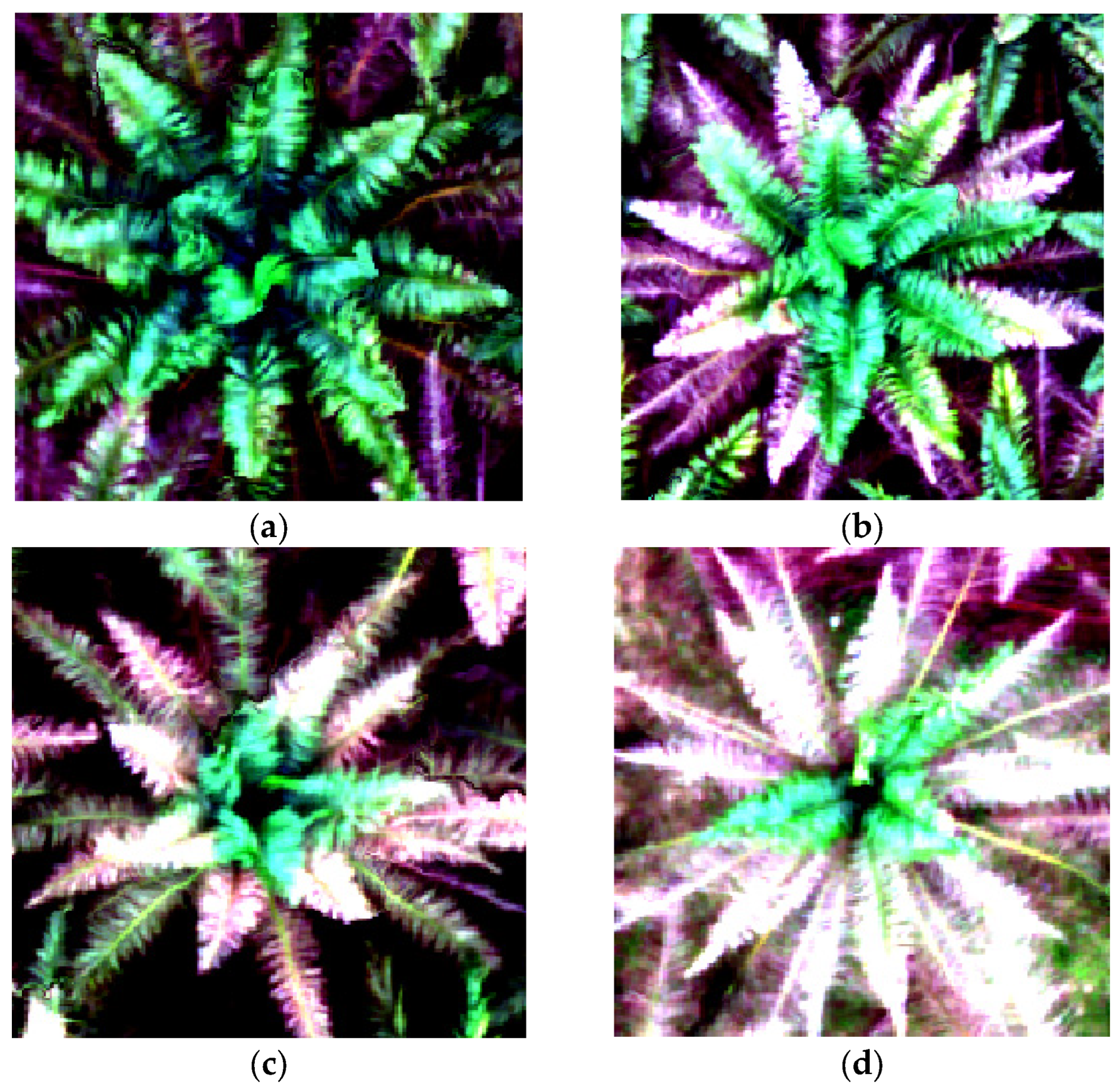
3.1. Imagery Acquisition
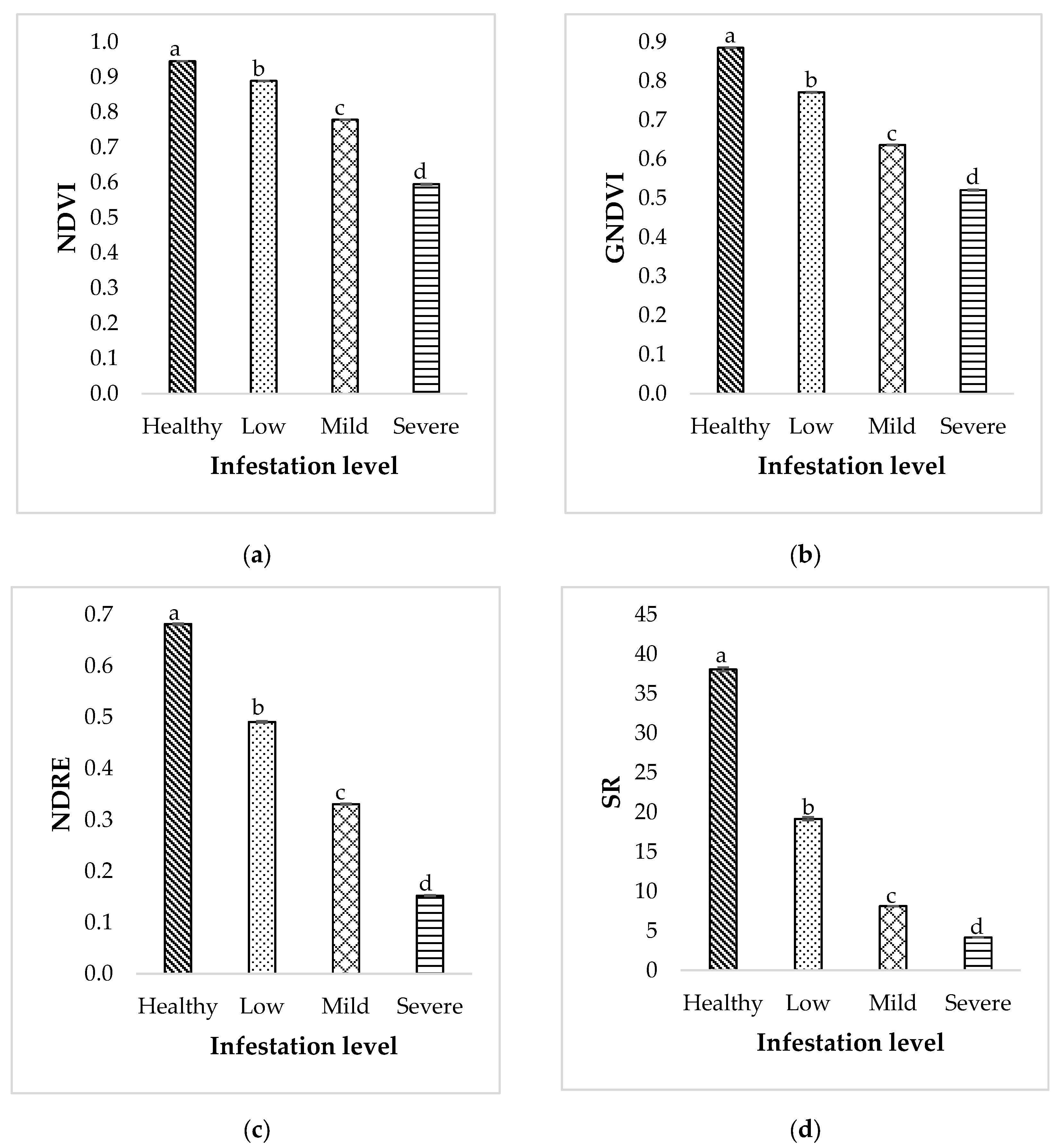
3.2. Vegetation Indices Analysis
3.3. Classification Model Analysis
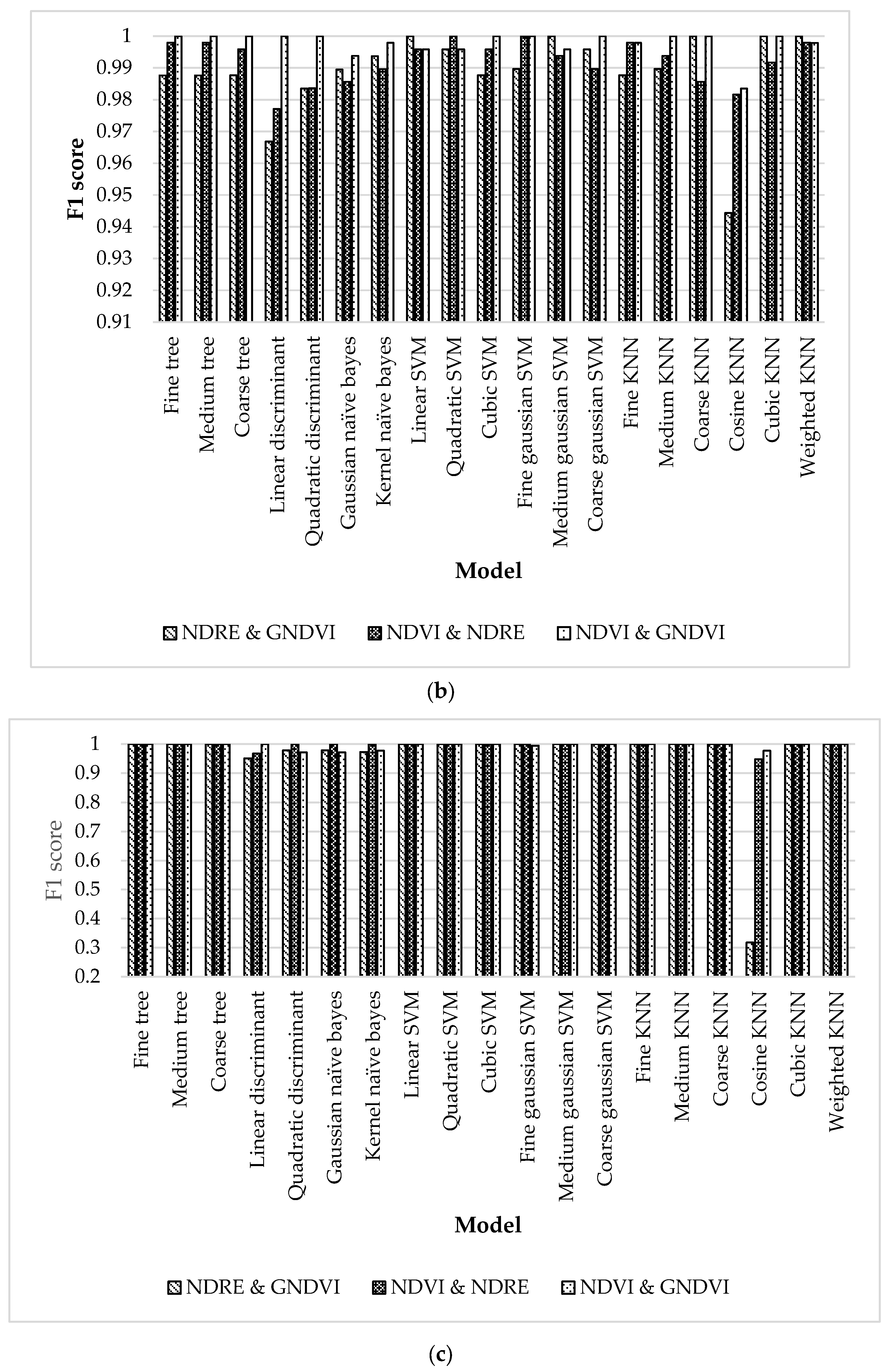
3.4. Effect of Combination of Vegetation Indices
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Norman, K.; Basri, M.W. Status of common oil palm insect pests in relation to technology adoption. Planter 2007, 83, 371–385. [Google Scholar]
- Cheong, Y.; Tey, C.C. Environmental Factors which lnfluence Bagworm outbreak. In Proceedings of the 5th MPOB-IOPRI International Seminar, Kuala lumpur, Malaysia, 22–23 November 2013; Volume 2013. [Google Scholar]
- Bagworm Infestation in District Causing Palm Oil Production to Drop. Available online: https://www.thestar.com.my/news/community/2012/11/21/bagworm-infestation-in-district-causing-palm-oil-production-to-drop (accessed on 12 June 2022).
- Chung, G.F. Effect of Pests and Diseases on Oil Palm Yield. In Palm Oil; AOCS Press: Boulder Urbana, IL, USA; Elsevier Inc.: Amsterdam, The Netherlands, 2012; pp. 163–210. [Google Scholar]
- Corley, R.H.V.; Tinker, P.B. Pests of the Oil Palm. In The Oil Palm; John Wiley & Sons: Hoboken, NJ, USA, 2019; pp. 437–459. [Google Scholar] [CrossRef]
- Wood, B.J.; Kamarudin, N. Bagworm (Lepidoptera: Psychidae) infestation in the centennial of the Malaysian oil palm industry—A review of causes and control. J. Oil Palm Res. 2019, 31, 364–380. [Google Scholar] [CrossRef]
- Tuck, H.C.; Ibrahim, Y.; Chong, K.K. Infestations by the bagworms metisa plana and pteroma pendula for the period 1986-2000 in major oil palm estates managed by golden hope plantation berhad in peninsular malaysia. J. Oil Palm Res. 2011, 23, 1040–1050. [Google Scholar]
- Aziz, N.A.; Omar, W.; Kassim, R.; Kamarudin, N. Remote Sensing Measurement for Detection of Bagworm Infestation in Oil Palm Plantation. MPOB Inf. Ser. 2012, 502, 589–597. [Google Scholar]
- Standard Operating Procedures (SOP) Guidelines for Bagworm Control. Malaysian Palm Oil Board (MPOB): Bangi, Malaysia, 2016.
- Kamarudin, N.; Ahmad Ali, S.R.; Mohd Masri, M.M.; Ahmad, M.N.; Che Manan, C.A.H.; Kamarudin, N. Controlling Metisa plana Walker (Lepidoptera: Psychidae) outbreak using Bacillus thuringiensis at an oil palm plantation. J. Oil Palm Res. 2019, 29, 47–54. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Ju, C.; Il Son, H. Unmanned aerial vehicles in agriculture: A review of perspective of platform, control, and applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Candiago, S.; Remondino, F.; De Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating multispectral images and vegetation indices for precision farming applications from UAV images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef]
- Xiang, H.; Tian, L. Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosyst. Eng. 2011, 108, 174–190. [Google Scholar] [CrossRef]
- Guimarães, N.; Pádua, L.; Marques, P.; Silva, N.; Peres, E.; Sousa, J.J. Forestry remote sensing from unmanned aerial vehicles: A review focusing on the data, processing and potentialities. Remote Sens. 2020, 12, 1046. [Google Scholar] [CrossRef]
- Gutierrez-Rodriguez, M.; Escalante-Estrada, J.A.; Rodriguez-Gonzalez, M.T. Canopy Reflectance, Stomatal Conductance, and Yield of Phaseolus vulgaris L. and Phaseolus coccinues L. Under Saline Field Conditions. Int. J. Agric. Biol. 2005, 7, 491–494. [Google Scholar]
- Klouček, T.; Komárek, J.; Surový, P.; Hrach, K.; Janata, P.; Vašíček, B. The use of UAV mounted sensors for precise detection of bark beetle infestation. Remote Sens. 2019, 11, 1561. [Google Scholar] [CrossRef]
- Minařík, R.; Langhammer, J.; Lendzioch, T. Automatic tree crown extraction from uas multispectral imagery for the detection of bark beetle disturbance in mixed forests. Remote Sens. 2020, 12, 4081. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Marin, D.B.; Ferraz, G.A.S.; Santama, L.S.; Barbosa, B.D.S.; Barata, R.A.P.; Osco, L.P.; Ramos, A.P.M.; Guimaraes, P.H.S. Detecting coffee leaf rust with UAV-based vegetation indices and decision tree machine learning models. Comput. Electron. Agric. 2021, 190, 106476. [Google Scholar] [CrossRef]
- Su, J.; Liu, C.; Coombes, M.; Hu, X.; Wang, C.; Xu, C.; Li, Q.; Guo, L.; Chen, W.H. Wheat yellow rust monitoring by learning from multispectral UAV aerial imagery. Comput. Electron. Agric. 2018, 155, 157–166. [Google Scholar] [CrossRef]
- DadrasJavan, F.; Samadzadegan, F.; Seyed Pourazar, S.H.; Fazeli, H. UAV-based multispectral imagery for fast Citrus Greening detection. J. Plant Dis. Prot. 2019, 126, 307–318. [Google Scholar] [CrossRef]
- Wang, T.; Thomasson, J.A.; Yang, C.; Isakeit, T.; Nichols, R.L. Automatic classification of cotton root rot disease based on UAV remote sensing. Remote Sens. 2020, 12, 1310. [Google Scholar] [CrossRef]
- Yu, R.; Luo, Y.; Zhou, Q.; Zhang, X.; Wu, D.; Ren, L. A machine learning algorithm to detect pine wilt disease using UAV-based hyperspectral imagery and LiDAR data at the tree level. Int. J. Appl. Earth Obs. Geoinf. 2021, 101, 102363. [Google Scholar] [CrossRef]
- Haw, Y.H.; Lai, K.W.; Chuah, J.H.; Khairunniza-Bejo, S.; Husin, N.A.; Hum, Y.C.; Yee, P.L.; Tee, C.A.T.H.; Ye, X.; Wu, X. Classification of basal stem rot using deep learning: A review of digital data collection and palm disease classification methods. PeerJ. Comput. Sci. 2023, 9, e1325. [Google Scholar] [CrossRef]
- Khosrokhani, M.; Khairunniza-Bejo, S.; Pradhan, B. Geospatial tecnologies for detection and monitoring of Ganoderma basal stem rot infestion in oil palm plantation: A review on sensors and techniques. Geocarto Int. 2018, 33, 260–276. [Google Scholar] [CrossRef]
- Viera-Torres, M.; Sinde-González, I.; Gil-Docampo, M.; Bravo-Yandún, V.; Toulkeridis, T. Generating the baseline in the early detection of bud rot and red ring disease in oil palms by geospatial technologies. Remote Sens. 2020, 12, 3229. [Google Scholar] [CrossRef]
- Anuar, I.M.; Arof, H.; Nor, N.M.; Hashim, Z.; Seman, I.A.; Masri, M.M.M.; Ibrahim, M.S.; Tat, E.H.; Toh, C.T. Remote Sensing for Detection of Ganoderma Disease and Bagworm Infestation in Oil Palm. Adv. Agric. Food Res. J. 2021, 2, 1–14. [Google Scholar] [CrossRef]
- Ahmad, M.N.; Mohamed Shariff, A.R.; Aris, I.; Abdul Halin, I.; Moslim, R. Identification and determination of the spectral reflectance properties of live and dead bagworms, Metisa plana Walker (Lepidoptera: Psychidae) using Vis/NIR spectroscopy. J. Oil Palm Res. 2020, 33, 425–435. [Google Scholar] [CrossRef]
- Mohd Johari, S.N.A.; Khairunniza-Bejo, S.; Shariff, A.R.M.; Husin, N.A.; Masri, M.M.M.; Kamarudin, N. Identification of bagworm (Metisa plana) instar stages using hyperspectral imaging and machine learning techniques. Comput. Electron. Agric. 2022, 194, 106739. [Google Scholar] [CrossRef]
- Mohd Johari, S.N.A.; Khairunniza-Bejo, S.; Shariff, A.R.M.; Husin, N.A.; Masri, M.M.M.; Kamarudin, N. Automatic Classification of Bagworm, Metisa plana (Walker) Instar Stages Using a Transfer Learning-Based Framework. Agriculture 2023, 13, 442. [Google Scholar] [CrossRef]
- Thaer, S.; Kassim, F.A.; Hasbullah, N.A.; Al-obaidi, J.R. Evaluation of bagworm, Metisa plana (Lepidoptera: Psychidae) infestation and beneficial parasitoid in an oil palm plantation, Perak, Malaysia. J. Sci. Math. Lett. 2021, 9, 19–35. [Google Scholar]
- Duarte, A.; Borralho, N.; Cabral, P.; Caetano, M. Recent Advances in Forest Insect Pests and Diseases Monitoring Using UAV-Based Data: A Systematic Review. Forests 2022, 13, 911. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Madrigal, V.P.; Mallinis, G.; Dor, E.B.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation system in the great plains with erts. J. Agric. Food Chem. 1976, 24, 24–26. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS- MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Merzlyak, M.N. Quantitative estimation of chlorophyll-a using reflectance spectra: Experiments with autumn chestnut and maple leaves. J. Photochem. Photobiol. B Biol. 1994, 22, 247–252. [Google Scholar] [CrossRef]
- Baret, F.; Guyot, G. Potentials and limits of vegetation indices for LAI and APAR assessment. Remote Sens. Environ. 1991, 35, 161–173. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Viña, A.; Ciganda, V.; Rundquist, D.C.; Arkebauer, T.J. Remote estimation of canopy chlorophyll content in crops. Geophys. Res. Lett. 2005, 32, 1–4. [Google Scholar] [CrossRef]
- Arlot, S.; Celisse, A. A survey of cross-validation procedures for model selection. Stat. Surv. 2010, 4, 40–79. [Google Scholar] [CrossRef]
- Rathore, D.S.; Ram, B.; Pal, B.L.; Malviya, S. Analysis of Classification Algorithms for Insect Detection using MATLAB. In Proceedings of the 2nd International Conference on Advanced Computing and Software Engineering (ICACSE) 2019, Sultanpur, India, 8–9 February, 2019; Volume 2019, pp. 299–304. [Google Scholar] [CrossRef]
- Mangewa, L.J.; Ndakidemi, P.A.; Alward, R.D.; Kija, H.K.; Bukombe, J.K.; Nasolwa, E.R.; Munishi, L.K. Comparative Assessment of UAV and Sentinel-2 NDVI and GNDVI for Preliminary Diagnosis of Habitat Conditions in Burunge Wildlife Management Area Tanzania. Earth 2022, 3, 769–787. [Google Scholar] [CrossRef]
- Boiarskii, B.; Hasegawa, H. Comparison of NDVI and NDRE Indices to Detect Differences in Vegetation and Chlorophyll Content. J. Mech. Contin. Math. Sci. 2019, 4, 20–29. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Infestation | Classification | Description |
|---|---|---|
| 0 | NIL |
|
| 1 | Light |
|
| 2 | Medium |
|
| 3 | Serious |
|
| Crop Type | Purpose of Study | Sensor Type | Vegetation Indices | Machine Learning | Classification Performance | References |
|---|---|---|---|---|---|---|
| Coffee | Coffee leaf rust disease | Multispectral camera | Normalized difference vegetation index (NDVI) Green Normalized Difference Vegetation Index (GNDVI) Normalized Difference Red Edge (NDRE) Modified normalized vegetation red edge (MNDRE) Modified Green Simple Ratio (MGSR) | Logistic model tree (LMT) | F1 score: 91.50% (early stage) F1 score: 87.50% (late stage) | [19] |
| Wheat | Yellow rust disease | Multispectral camera | Ratio vegetation index (RVI) Normalized difference vegetation index (NDVI) Optimized soil adjusted vegetation index (OSAVI) | Random forest (RF) | Precision: 89.20% Recall: 89.40% Accuracy: 89.3% (45 days after inoculation) | [20] |
| Forest | Bark beetle infestation | RGB camera NIR customized sensor | Greenness Index (GI), Simple Ratio (SR), Green Ratio Vegetation Index (GRVI), Normalized Difference Vegetation Index (NDVI), Green Normalized Difference Vegetation Index (GNDVI) | Maximum likelihood classifier (MLC) | Overall accuracy: 78–96% (across the time periods) | [16] |
| Pine wilt disease | Hyperspectral camera (HI) and LiDAR | Normalized Difference Vegetation Index (NDVI), Simple Ratio (SR), Chlorophyll Index (CI), | Random forest (RF) | Overall accuracy (HI + LiDAR): 73.96% (Early-stage PWD) | [23] | |
| Citrus | Greening disease | Multispectral camera | Normalized difference vegetation index (NDVI) Simple ratio (SR) Chlorophyll index (CI) Green Normalized Difference Vegetation Index (GNDVI) Normalized Difference Red Edge (NDRE) | Support vector machine (SVM) | Overall accuracy: 81.50% | [21] |
| Cotton | Cotton rot disease | Multispectral camera | Green, red and NIR band (CIR) | Unsupervised: k-means Supervised: support vector machine (SVM), minimum distance, maximum likelihood, Mahalanobis distance | Overall accuracy: 88.5% | [22] |
| Oil palm | Bud rot (BR) and red ring disease (RRD) | Multispectral camera | Normalized difference vegetation index (NDVI), Green Normalized Difference Vegetation Index (GNDVI), Green vegetation index (GVI) Visible atmospherically resistant index (VARI) | Lowest Significant Difference (LSD) | Statistically significant differences between healthy and diseased palms, (generating the baseline of early responses of BR and RRD) | [26] |
| Bagworm infestation | Multispectral camera | Three band combinations; Green_Red_RedEdge Green_Red_NIR Red_RedEdge_NIR Green_RedEdge_NIR | - (Visual analysis) | Green_Red_RedEdge is the best to visually differentiate healthy and infested oil palm | [27] | |
| Ganoderma disease | Multispectral camera | Three band combinations; Green_Red_RedEdge Green_Red_NIR Red_RedEdge_NIR Green_RedEdge_NIR | Object-based-image-analysis method (OBIA) | >80% | [27] |
| Infestation | Location | Area (ha) | Coordinates | Number of Trees |
|---|---|---|---|---|
| Healthy | Serdang, Selangor | 6.0 | 2°59′13″ N 101°43′34″ E | 750 |
| Low | Pagoh, Johor | 7.0 | 2°10′39″ N 102°47′01″ E | 800 |
| Mild | 2.0 | 2°10′48″ N 102°47′11″ E | 300 | |
| Severe | Ayer Kuning, Perak | 10.0 | 4°11′56″ N 101°07′38″ E | 1000 |
| Classification | Percentage of Incident Rate | Details of Incident Rate | Number of Bagworms per Frond |
|---|---|---|---|
| NIL (Healthy) | 0% | No infested frond detected | No bagworm detected |
| Low | 1–33% | Light necrosis was detected | 10 and below |
| Mild | 34–67% | Moderate necrosis and hole detected | 11–50 |
| Severe | 68–100% | Serious necrosis and hole detected | 50 and above |
| No. | Vegetation Index | Formula | Reference |
|---|---|---|---|
| 1 | NDVI | [34] | |
| 2 | GNDVI | [35] | |
| 3 | NDRE | [36] | |
| 4 | SR | [37] | |
| 5 | GCI | [38] | |
| 6 | RECI |
| Infestation | NDVI | NDRE | GNDVI | SR | GCI | RECI |
|---|---|---|---|---|---|---|
| Healthy (n = 750) | 0.9469 ± 0.00034 a | 0.6853 ± 0.00130 a | 0.8874 ± 0.00069 a | 38.7001 ± 0.23590 a | 16.6700 ± 0.10268 a | 4.4696 ± 0.02413 a |
| Low (n = 800) | 0.8892 ± 0.00082 b | 0.4908 ± 0.00147 b | 0.7717 ± 0.00095 b | 19.1967 ± 0.16968 b | 7.1558 ± 0.04566 b | 1.9789 ± 0.01162 b |
| Mild (n = 300) | 0.7816 ± 0.00042 c | 0.3319 ± 0.00109 c | 0.6380 ± 0.00090 c | 8.2434 ± 0.01708 c | 3.6012 ± 0.01341 c | 1.0106 ± 0.00513 c |
| Severe (n = 1000) | 0.5958 ± 0.00180 d | 0.1524 ± 0.00088 d | 0.5213 ± 0.00149 d | 4.1870 ± 0.02339 d | 2.2669 ± 0.01316 d | 0.3643 ± 0.00245 d |
| Classifier | Kernel | NDVI and NDRE | NDVI and GNDVI | NDRE and GNDVI | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Train | Test | Difference (%) | Train | Test | Difference (%) | Train | Test | Difference (%) | ||
| Tree | Fine | 99.65 | 99.89 | 0.24 | 99.32 | 100.00 * | 0.69 | 99.07 | 99.35 | 0.29 |
| Medium | 99.65 | 99.89 | 0.24 | 99.32 | 100.00 * | 0.69 | 99.07 | 99.35 | 0.29 | |
| Coarse | 99.70 | 99.78 | 0.09 | 99.22 | 100.00 * | 0.78 | 99.20 | 99.35 | 0.15 | |
| Discriminant | Linear | 98.56 | 98.34 | 0.23 | 99.18 | 100.00 * | 0.82 | 98.90 | 97.56 | 1.36 |
| Quadratic | 99.61 | 99.14 | 0.47 | 99.50 | 99.08 | 0.43 | 99.52 | 98.62 | 0.90 | |
| Naïve Bayes | Gaussian | 99.64 | 99.25 | 0.40 | 99.18 | 98.76 | 0.43 | 99.09 | 99.14 | 0.05 |
| Kernel | 99.78 | 99.46 | 0.32 | 99.60 | 99.16 | 0.44 | 99.19 | 99.08 | 0.10 | |
| SVM | Linear | 99.78 | 99.78 | 0.00 | 99.46 | 99.78 | 0.33 | 99.39 | 100.00 * | 0.61 |
| Quadratic | 99.83 | 100.00 * | 0.17 | 99.47 | 99.78 | 0.31 | 99.39 | 99.78 | 0.40 | |
| Cubic | 99.78 | 99.78 | 0.00 | 99.50 | 100.00 * | 0.50 | 99.39 | 99.35 | 0.04 | |
| Fine Gaussian | 99.69 | 100.00 * | 0.31 | 99.51 | 99.82 | 0.31 | 99.39 | 99.46 | 0.07 | |
| Medium Gaussian | 99.78 | 99.68 | 0.10 | 99.55 | 99.78 | 0.24 | 99.34 | 100.00 * | 0.66 | |
| Coarse Gaussian | 99.78 | 99.46 | 0.32 | 99.41 | 100.00 * | 0.59 | 99.30 | 99.15 | 0.15 | |
| KNN | Fine | 99.78 | 99.89 | 0.11 | 99.56 | 99.89 | 0.33 | 99.19 | 99.28 | 0.09 |
| Medium | 99.73 | 99.68 | 0.06 | 99.60 | 100.00 * | 0.41 | 99.26 | 100.00 * | 0.74 | |
| Coarse | 99.65 | 99.25 | 0.41 | 99.55 | 100.00 * | 0.45 | 99.26 | 99.33 | 0.06 | |
| Cosine | 98.22 | 97.34 | 0.89 | 97.89 | 98.40 | 0.53 | 76.64 | 77.03 | 0.51 | |
| Cubic | 99.73 | 99.57 | 0.16 | 99.60 | 100.00 * | 0.41 | 99.34 | 100.00 * | 0.66 | |
| Weighted | 99.73 | 99.89 | 0.16 | 99.61 | 99.89 | 0.29 | 99.39 | 100.00 * | 0.61 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Johari, S.N.A.M.; Khairunniza-Bejo, S.; Shariff, A.R.M.; Husin, N.A.; Masri, M.M.M.; Kamarudin, N. Detection of Bagworm Infestation Area in Oil Palm Plantation Based on UAV Remote Sensing Using Machine Learning Approach. Agriculture 2023, 13, 1886. https://doi.org/10.3390/agriculture13101886
Johari SNAM, Khairunniza-Bejo S, Shariff ARM, Husin NA, Masri MMM, Kamarudin N. Detection of Bagworm Infestation Area in Oil Palm Plantation Based on UAV Remote Sensing Using Machine Learning Approach. Agriculture. 2023; 13(10):1886. https://doi.org/10.3390/agriculture13101886
Chicago/Turabian StyleJohari, Siti Nurul Afiah Mohd, Siti Khairunniza-Bejo, Abdul Rashid Mohamed Shariff, Nur Azuan Husin, Mohamed Mazmira Mohd Masri, and Noorhazwani Kamarudin. 2023. "Detection of Bagworm Infestation Area in Oil Palm Plantation Based on UAV Remote Sensing Using Machine Learning Approach" Agriculture 13, no. 10: 1886. https://doi.org/10.3390/agriculture13101886