A Numerical Landslide-Tsunami Hazard Assessment Technique Applied on Hypothetical Scenarios at Es Vedrà, Offshore Ibiza

Abstract
:1. Introduction
2. Methods
2.1. DualSPHysics
2.1.1. Basic Principles
2.1.2. Governing Equations
2.2. SWASH
2.2.1. Numerical Background
2.2.2. Numerical Model Setup and Boundary Conditions
3. Results
3.1. Wave Generation
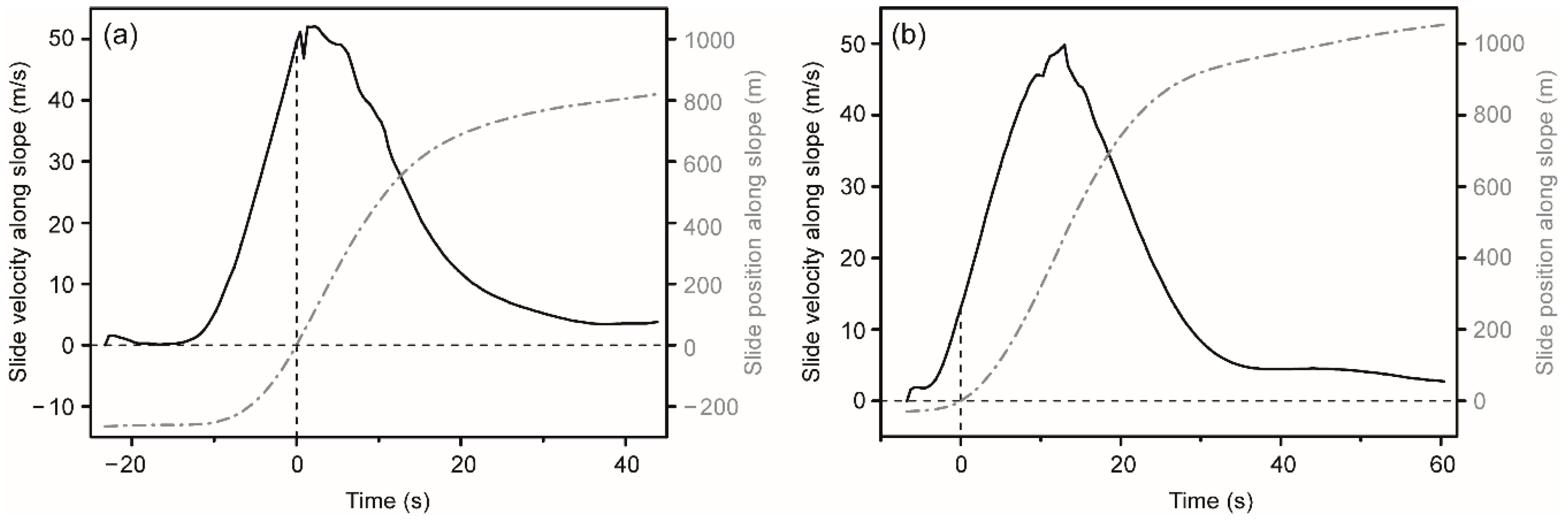
3.1.1. Slide Scenarios
3.1.2. Convergence Tests
3.1.3. Analysis of the Results
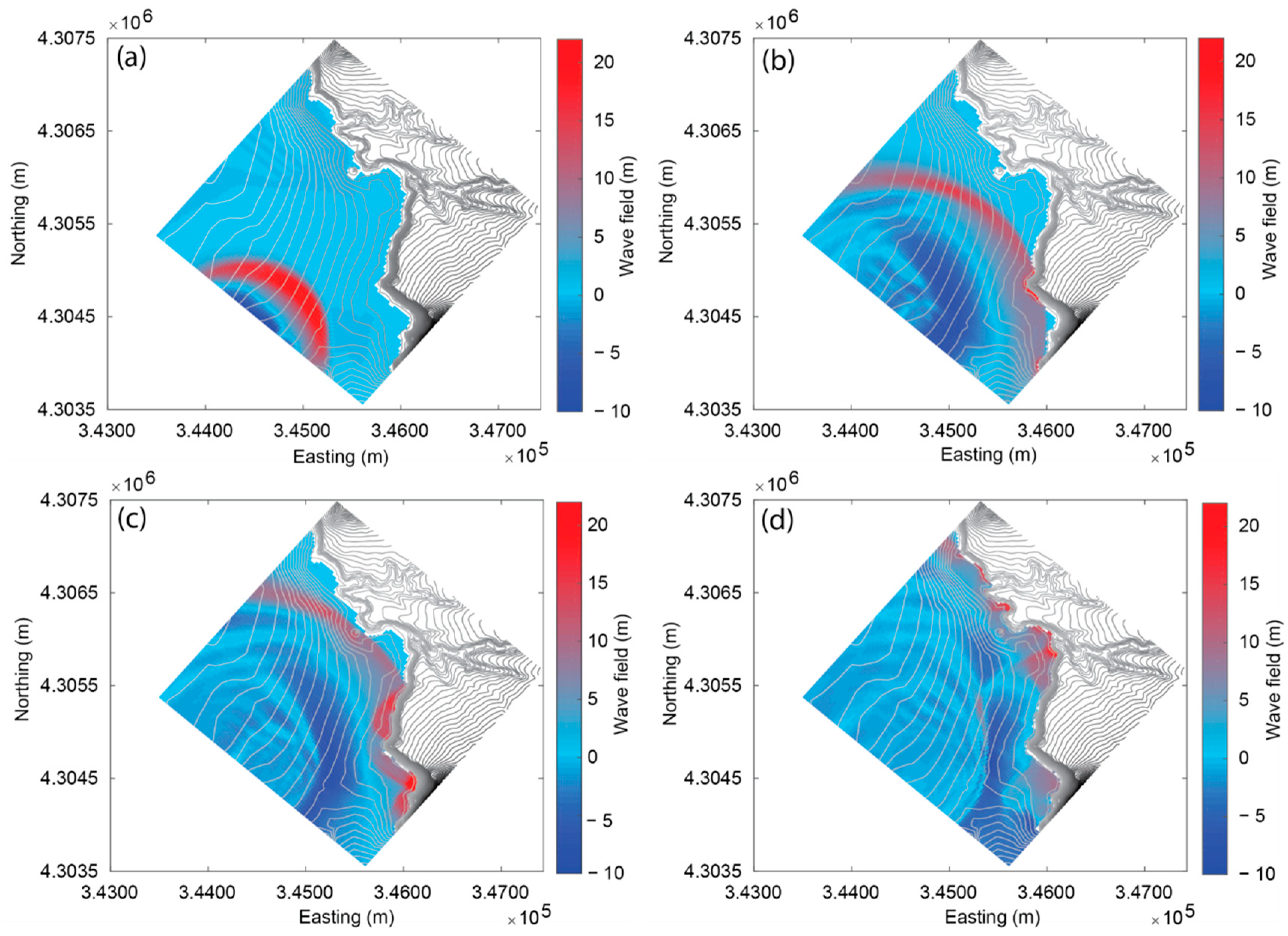
3.2. Wave Propagation and Run-Up
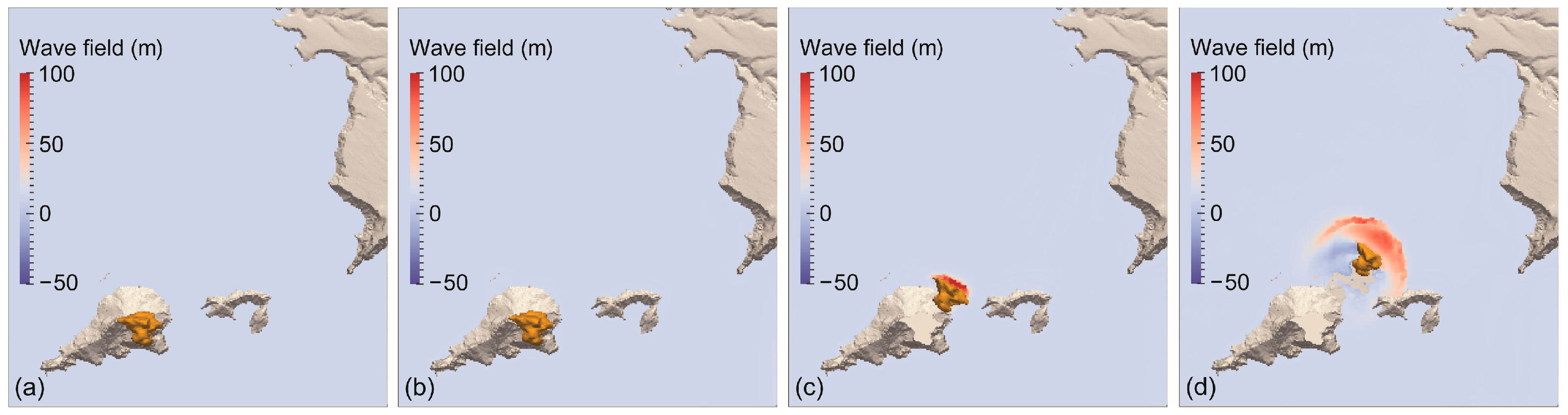
3.2.1. Scenario 1 (Cala d’Hort)
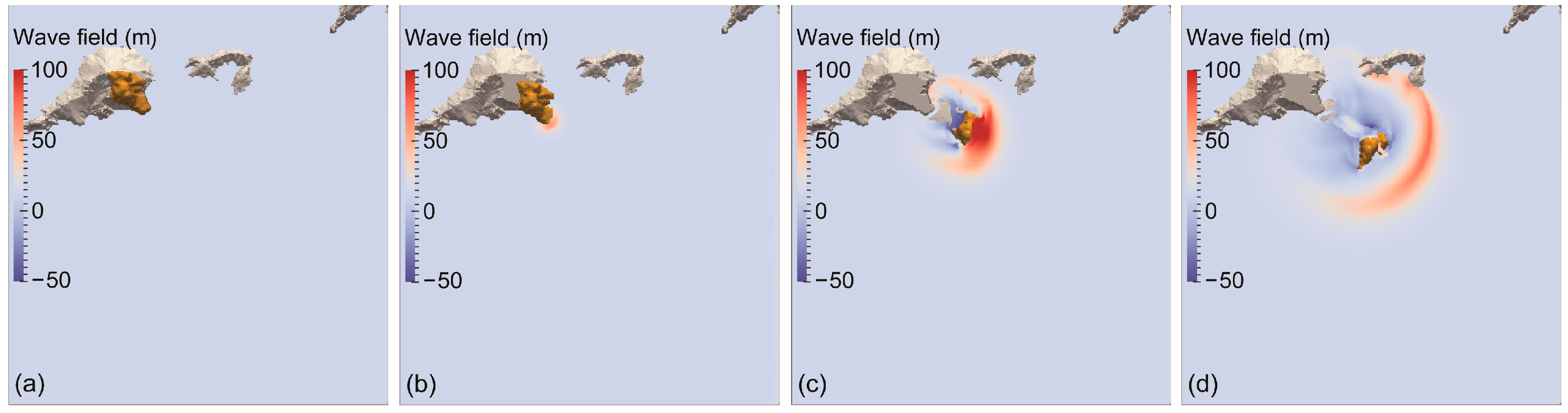
3.2.2. Scenario 2 (Marina de Formentera)
4. Discussion
4.1. Comparison with La Palma Case
4.2. Implications and Limitations
5. Conclusions
- —
- Two different slide–wave interaction phases were observed. (i) At the very beginning, the slide moved faster than the waves, such that the slide propagated below the primary wave crest and additionally elevated the water column and free water surface. (ii) The slide then slowed down such that the waves travelled faster and abruptly decayed due to the increased water depth.
- —
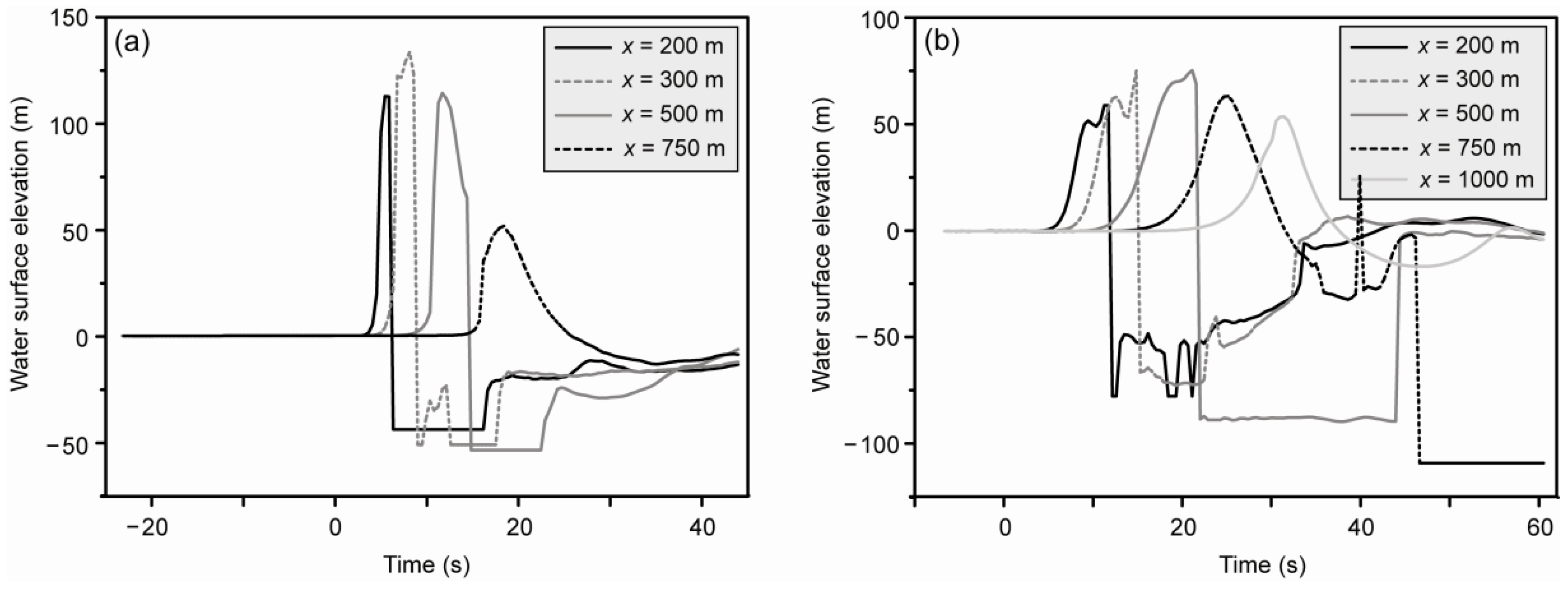
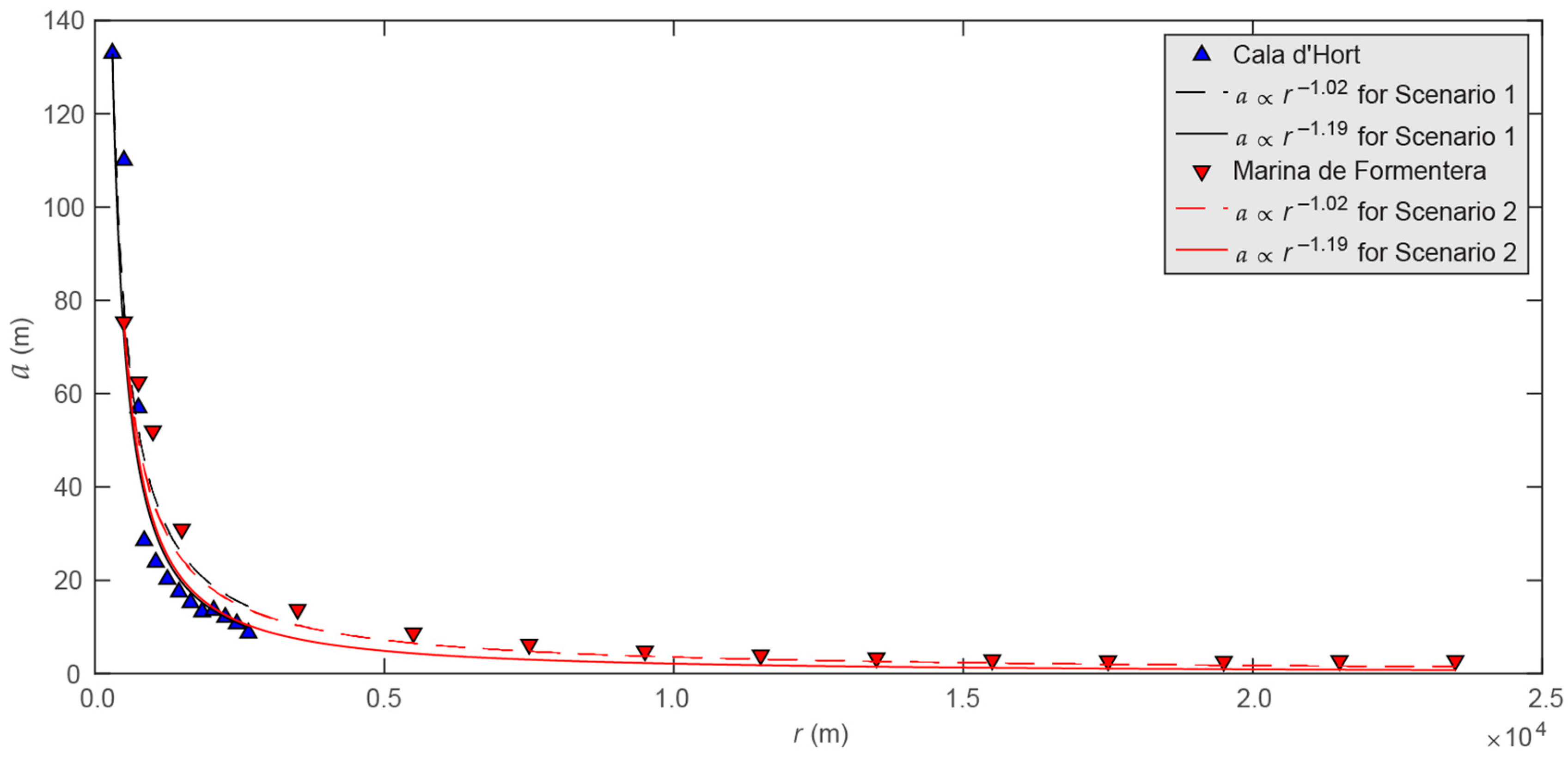
- In scenario 1 (Cala d’Hort), the maximum wave amplitude was 133.0 m, reducing to a wave amplitude of 14.2 m at 5 m offshore and a maximum run-up height of over 21.5 m. In scenario 2 (Marina de Formentera), the maximum wave amplitude was 75.4 m, reducing to 2.7 m at 5 m offshore Marina de Formentera, such that the inundation depth was 1.2 m in the populated harbor area. This is significantly smaller than at Cala d’Hort, but may still result in significant devastation due to a larger density of buildings and infrastructure.
- —
- The proposed numerical technique results likely in an overestimation of the landslide tsunamis because extreme slide scenarios were selected (extreme slide masses, slip orientation, and subaerial slides), and the slide velocity in DualSPHysics is likely to be overpredicted.
- —
- The proposed numerical technique also provided new insights into 3D landslide-tsunami propagation by considering site-specific bathymetric and topographic conditions.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Notation
| Amplitude [m] | |
| Speed of sound [m/s] | |
| Average speed of sound [m/s] | |
| Speed of sound at the reference density [m/s] | |
| Bottom friction coefficient [-] | |
| Courant number [-] | |
| Total water depth [m] | |
| Particle spacing [mm] | |
| Field variable [-] | |
| Gravitational acceleration [m/s2] | |
| Gravitational acceleration vector [m/s2] | |
| Still water depth [m] | |
| Smoothing length [m] | |
| Wave number [-] | |
| Mass [kg] | |
| Manning’s roughness coefficient [] | |
| Pressure [kg/ms2] | |
| Hydrostatic pressure [kg/ms2] | |
| Total pressure [kg/ms2] | |
| Non-hydrostatic pressure [kg/ms2] | |
| Radial distance from slide impact location [m] | |
| Time [s] | |
| Depth-averaged velocity in x-direction [m/s] | |
| Velocity vector [m/s] | |
| Depth-averaged velocity in y-direction [m/s] | |
| Maximum flow velocity [m/s] | |
| Vertical velocity at the bottom [m/s] | |
| Vertical velocity at the free surface [m/s] | |
| Weighting function or smoothing kernel [-] | |
| x | Distance from the slide impact; coordinate along the slide axis [m] |
| Position vector [m] | |
| Distance from Cala d’Hort [m] | |
| Distance from Marina de Formentera [m] | |
| y | Coordinate perpendicular to the slide axis [m] |
| z | Coordinate vertical to the slide axis [m] |
| Dimensionless parameter in the equation of state [-] | |
| Dissipative term [-] | |
| Delta SPH coefficient [-] | |
| Time step [s] | |
| Grid resolution in the x-direction [m] | |
| Grid resolution in the y-direction [m] | |
| Relative density fluctuation [-] | |
| Dimensionless parameter in the XSPH variant [-] | |
| Water surface elevation [m] | |
| Artificial viscosity coefficient [-] | |
| Intermediate variable in the artificial viscosity [-] | |
| vt | Horizontal eddy viscosity [m2/s] |
| Artificial viscosity [-] | |
| Density [kg/m3] | |
| Average density [kg/m3] | |
| Reference density [kg/m3] | |
| Turbulent stress [kgm3/s2] | |
| Computation domain [-] | |
| Subscript | |
| Fluid particles | |
| Abbreviation | |
| BC | Boundary Condition |
| CFL | Courant-Friedrichs-Lewy |
| CPU | Central Processing Unit |
| GPU | Graphics Processing Unit |
| HPC | High Performance Computing |
| MPS | Moving Particle Semi-implicit |
| NLSWE | Non-Linear Shallow Water Equation |
| PFEM | Particle Finite Element Method |
| RAM | Random Access Memory |
| SPH | Smoothed Particle Hydrodynamics |
| SWASH | Simulating WAve till SHore |
| SWL | Still Water Level |
| WCSPH | Weakly Compressible SPH |
References
- Panizzo, A.; Girolamo, P.D.; Risio, M.D.; Maistri, A.; Petaccia, A. Great landslide events in Italian artificial reservoirs. Nat. Hazards Earth Syst. Sci. 2005, 5, 733–740. [Google Scholar] [CrossRef] [Green Version]
- Fuchs, H.; Pfister, M.; Boes, R.; Perzlmaier, S.; Reindl, R. Impulswellen infolge Lawineneinstoss in den Speicher Kühtai. Wasserwirtschaft 2011, 101, 54–60. [Google Scholar] [CrossRef]
- Fuchs, H.; Boes, R. Berechnung felsrutschinduzierter Impulswellen im Vierwaldstättersee. Wasser Energie Luft 2010, 102, 215–221. [Google Scholar]
- Gylfadóttir, S.S.; Kim, J.; Helgason, J.K.; Brynjólfsson, S.; Höskuldsson, Á.; Jóhannesson, T.; Harbitz, C.B.; Løvholt, F. The 2014 Lake Askja rockslide-induced tsunami: Optimization of numerical tsunami model using observed data. J. Geophys. Res. Oceans 2017, 122, 4110–4122. [Google Scholar] [CrossRef] [Green Version]
- Harbitz, C.B.; Glimsdal, S.; Løvholt, F.; Kveldsvik, V.; Pedersen, G.K.; Jensen, A. Rockslide tsunamis in complex fjords: From an unstable rock slope at Åkerneset to tsunami risk in western Norway. Coast. Eng. 2014, 88, 101–122. [Google Scholar] [CrossRef]
- Watt, S.F.L.; Talling, P.J.; Vardy, M.E.; Heller, V.; Hühnerbach, V.; Urlaub, M.; Sarkar, S.; Masson, D.G.; Henstock, T.J.; Minshull, T.A.; et al. Combinations of volcanic-flank and seafloor-sediment failure offshore Montserrat, and their implications for tsunami generation. Earth Planet. Sci. Lett. 2012, 319, 228–240. [Google Scholar] [CrossRef]
- Vacondio, R.; Mignosa, P.; Pagani, S. 3D SPH numerical simulation of the wave generated by the Vajont rockslide. Adv. Water Resour. 2013, 59, 146–156. [Google Scholar] [CrossRef]
- Heller, V.; Bruggemann, M.; Spinneken, J.; Rogers, B.D. Composite modelling of subaerial landslide–tsunamis in different water body geometries and novel insight into slide and wave kinematics. Coast. Eng. 2016, 109, 20–41. [Google Scholar] [CrossRef] [Green Version]
- Zijlema, M.; Stelling, G. Efficient computation of surf zone waves using the nonlinear shallow water equations with non-hydrostatic pressure. Coast. Eng. 2008, 55, 780–790. [Google Scholar] [CrossRef]
- Zijlema, M.; Stelling, G.; Smit, P. SWASH: An operational public domain code for simulating wave fields and rapidly varied flows in coastal waters. Coast. Eng. 2011, 58, 992–1012. [Google Scholar] [CrossRef]
- Sælevik, G.; Jensen, A.; Pedersen, G. Experimental investigation of impact generated tsunami; related to a potential rock slide, Western Norway. Coast. Eng. 2009, 56, 897–906. [Google Scholar] [CrossRef]
- Abadie, S.M.; Harris, J.C.; Grilli, S.T.; Fabre, R. Numerical modeling of tsunami waves generated by the flank collapse of the Cumbre Vieja Volcano (La Palma, Canary Islands): Tsunami source and near field effects. J. Geophys. Res. Oceans 2012, 117, C05030. [Google Scholar] [CrossRef]
- Heller, V.; Spinneken, J. Improved landslide-tsunami prediction: Effects of block model parameters and slide model. J. Geophys. Res. Oceans 2013, 118, 1489–1507. [Google Scholar] [CrossRef] [Green Version]
- Heller, V.; Hager, W.H. Impulse product parameter in landslide generated impulse waves. J. Waterw. Port Coast. Ocean Eng. 2010, 136, 145–155. [Google Scholar] [CrossRef]
- Heller, V.; Hager, W.H. A universal parameter to predict landslide-tsunamis? J. Mar. Sci. Eng. 2014, 2, 400–412. [Google Scholar] [CrossRef]
- Evers, F.M.; Hager, W.H. Spatial impulse waves: Wave height decay experiments at laboratory scale. Landslides 2016, 13, 1395–1403. [Google Scholar] [CrossRef]
- Heller, V.; Hager, W.H.; Minor, H.-E. Landslide Generated Impulse Waves in Reservoirs—Basics and Computation; Swiss Federal Institute of Technology (ETH) Zurich: Zurich, Switzerland, 2009. [Google Scholar]
- Battaglia, D.; Strozzi, T.; Bezzi, A. Landslide hazard: Risk zonation and impact wave analysis for the Bumbuma Dam-Sierra Leone. Geol. Soc. Territory 2015, 2, 1129–1134. [Google Scholar]
- BGC Engineering Inc. Appendix 4-E Mitchell Pit Landslide Generated Wave Modelling; BGC Engineering Inc.: Vancouver, BC, Canada, December 2012. [Google Scholar]
- Gabl, R.; Seibl, J.; Gems, B.; Aufleger, M. 3-D numerical approach to simulate the overtopping volume caused by an impulse wave comparable to avalanche impact in a reservoir. Nat. Hazards Earth Syst. Sci. 2015, 15, 2617–2630. [Google Scholar] [CrossRef] [Green Version]
- Lüthi, M.P.; Vieli, A. Multi-method observation and analysis of a tsunami caused by glacier calving. Cryosphere 2016, 10, 995–1002. [Google Scholar] [CrossRef] [Green Version]
- Oppikofer, T.; Hermanns, R.L.; Sandoy, G.; Böhme, M.; Jaboyedoff, M.; Horton, P.; Roberts, N.J.; Fuchs, H. Quantification of casualties from potential rock-slope failures in Norway. Landslides Eng. Slopes. Exp. Theory Pract. 2016, 1537–1544. [Google Scholar]
- Salazar, F.; Irazábal, J.; Larese, A.; Oñate, E. Numerical modelling of landslide-generated waves with the particle finite element method (PFEM) and a non-Newtonian flow model. Int. J. Numer. Anal. Methods Geomech. 2016, 40, 809–826. [Google Scholar] [CrossRef] [Green Version]
- Tan, H.; Chen, S. A hybrid DEM-SPH model for deformable landslide and its generated surge waves. Adv. Water Resour. 2017, 108, 256–276. [Google Scholar] [CrossRef]
- Kesseler, M.; Heller, V.; Turnbull, B. A laboratory-numerical approach for modelling scale effects in dry granular slides. Landslides 2018, 15, 1–15. [Google Scholar] [CrossRef]
- Fu, L.; Jin, Y.C. Investigation of non-deformable and deformable landslides using meshfree method. Ocean Eng. 2015, 109, 192–206. [Google Scholar] [CrossRef]
- Shi, C.; An, Y.; Wu, Q.; Liu, Q.; Cao, Z. Numerical simulation of landslide-generated waves using a soil–water coupling smoothed particle hydrodynamics model. Adv. Water Resour. 2016, 92, 130–141. [Google Scholar] [CrossRef] [Green Version]
- Cremonesi, M.; Frangi, A.; Perego, U. A Lagrangian finite element approach for the simulation of water-waves induced by landslides. Comput. Struct. 2011, 89, 1086–1093. [Google Scholar] [CrossRef]
- Heller, V.; Spinneken, J. On the effect of the water body geometry on landslide-tsunamis: Physical insight from laboratory tests and 2D to 3D wave parameter transformation. Coast. Eng. 2015, 104, 113–134. [Google Scholar] [CrossRef]
- Crespo, A.J.C.; Domínguez, J.M.; Rogers, B.D.; Gómez-Gesteira, M.; Longshaw, S.; Canelas, R.; Vacondio, R.; Barreiro, A.; García-Feal, O. DualSPHysics: Open-source parallel CFD solver based on smoothed particle hydrodynamics (SPH). Comput. Phys. Commun. 2015, 187, 204–216. [Google Scholar] [CrossRef]
- Violeau, D.; Rogers, B.D. Smoothed particle hydrodynamics (SPH) for free-surface flows: Past, present and future. J. Hydraul. Res. 2016, 54, 1–26. [Google Scholar] [CrossRef]
- Madsen, P.A.; Fuhrman, D.R.; Schäffer, H.A. On the solitary wave paradigm for tsunamis. J. Geophys. Res. 2008, 113, C12012. [Google Scholar] [CrossRef]
- Narayanaswamy, M.; Crespo, A.J.C.; Gómez-Gesteira, M.; Dalrymple, R.A. SPHysics-FUNWAVE hybrid model for coastal wave propagation. J. Hydraul. Res. 2010, 48, 85–93. [Google Scholar] [CrossRef]
- Altomare, C.; Domínguez, J.M.; Crespo, A.J.C.; Suzuki, T.; Caceres, I.; Gómez-Gesteira, M. Hybridization of the wave propagation model SWASH and the meshfree particle method SPH for real coastal applications. Coast. Eng. J. 2015, 57, 1550024. [Google Scholar] [CrossRef]
- Viroulet, S.; Cébron, D.; Kimmoun, O.; Kharif, C. Shallow water waves generated by subaerial solid landslides. Geophys. J. Int. 2013, 193, 747–762. [Google Scholar] [CrossRef] [Green Version]
- European Marine Observation and Data Network, Bathymetry. Available online: http://portal.emodnet-bathymetry.eu/ (accessed on 15 May 2018).
- CNIG, Topography. Available online: http://centrodedescargas.cnig.es/CentroDescargas/locale?request_locale=en (accessed on 15 May 2018).
- Gomez-Gesteira, M.; Rogers, B.D.; Crespo, A.J.C.; Dalrymple, R.A.; Narayanaswamy, M.; Dominguez, J.M. SPHysics—Development of a free-surface fluid solver—Part 1: Theory and formulations. Comput. Geosci. 2012, 48, 289–299. [Google Scholar] [CrossRef]
- Gomez-Gesteira, M.; Rogers, B.D.; Dalrymple, R.A.; Crespo, A.J.C. State-of-the-art of classical SPH for free-surface flows. J. Hydraul. Res. 2010, 48, 6–27. [Google Scholar] [CrossRef]
- Tan, H.; Xu, Q.; Chen, S. Subaerial rigid landslide-tsunamis: Insights from a block DEM-SPH model. Eng. Anal. Bound. Elem. 2018, 95, 297–314. [Google Scholar] [CrossRef]
- Liu, G.R.; Liu, M.B. Smoothed Particle Hydrodynamics: A Meshfree Particle Method, 1st ed.; World Scientific: Singapore, 2003. [Google Scholar]
- Molteni, D.; Colagrossi, A. A simple procedure to improve the pressure evaluation in hydrodynamic context using the SPH. Comput. Phys. Commun. 2009, 180, 861–872. [Google Scholar] [CrossRef]
- Monaghan, J.J. Smoothed particle hydrodynamics. Rep. Prog. Phys. 2005, 68, 1703–1759. [Google Scholar] [CrossRef]
- Monaghan, J.J. Smoothed particle hydrodynamics. Annu. Rev. Astron. Astrophys. 1992, 30, 543–574. [Google Scholar] [CrossRef]
- Monaghan, J.J. Simulating free surface flows with SPH. J. Comput. Phys. 1994, 110, 399–406. [Google Scholar] [CrossRef]
- Morris, J.P.; Fox, P.J.; Zhu, Y. Modeling low Reynolds number incompressible flows using SPH. J. Comput. Phys. 1997, 136, 214–226. [Google Scholar] [CrossRef]
- Crespo, A.J.C.; Gómez-Gesteira, M.; Dalrymple, R.A. Boundary conditions generated by dynamic particles in SPH methods. CMC Comput. Mater. Contin. 2007, 5, 173–184. [Google Scholar]
- Ruffini, G.; Heller, V.; Briganti, R. Numerical modelling of landslide-tsunami propagation in a wide range of idealised water body geometries. 2018. (in preparation) [Google Scholar]
- Stelling, G.; Zijlema, M. An accurate and efficient finite-difference algorithm for non-hydrostatic free-surface flow with application to wave propagation. Int. J. Numer. Methods Fluids 2003, 43, 1–23. [Google Scholar] [CrossRef]
- Zijlema, M.; Stelling, G. Further experiences with computing non-hydrostatic free-surface flows involving water waves. Int. J. Numer. Methods Fluids 2005, 48, 169–197. [Google Scholar] [CrossRef]
- Blayo, E.; Debreu, L. Revisiting open boundary conditions from the point of view of characteristic variables. Ocean Model. 2005, 9, 231–252. [Google Scholar] [CrossRef] [Green Version]
- Sommerfeld, A. Die Greensche Funktion der Schwingungsgleichung. Jahresber. Dtsch. Mathematiker-Ver. 1912, 21, 309–353. [Google Scholar]
- SWASH—User Manual; Version 4.01; Delft University of Technology: Delft, The Netherland, 2016.
- Nehlich, O.; Fuller, B.T.; Márquez-Grant, N.; Richards, M.P. Investigation of diachronic dietary patterns on the islands of Ibiza and Formentera, Spain: Evidence from sulfur stable isotope ratio analysis. Am. J. Phys. Anthropol. 2012, 149, 115–124. [Google Scholar] [CrossRef] [PubMed]
- Manger, G.E. Porosity and Bulk Density of Sedimentary Rocks; U.S. G.P.O.: Washington, DC, USA, 1963. [Google Scholar]
- Hughes, S.A. Physical Models and Laboratory Techniques in Coastal Engineering, 1st ed.; World Scientific: Singapore, 1993. [Google Scholar]
- Heller, V. Scale effects in physical hydraulic engineering models. J. Hydraul. Res. 2011, 49, 293–306. [Google Scholar] [CrossRef]
- Wang, J.; Ward, S.N.; Xiao, L. Numerical simulation of the December 4, 2007 landslide-generated tsunami in Chehalis Lake, Canada. Geophys. J. Int. 2015, 201, 372–376. [Google Scholar] [CrossRef] [Green Version]
- Pudasaini, S.P.; Miller, S.A. The hypermobility of huge landslides and avalanches. Eng. Geol. 2013, 157, 124–132. [Google Scholar] [CrossRef]
- Huang, B.; Yin, Y.; Chen, X.; Liu, G.; Wang, S.; Jiang, Z. Experimental modeling of tsunamis generated by subaerial landslides: Two case studies of the Three Gorges Reservoir, China. Environ. Earth Sci. 2014, 71, 3813–3825. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Scenario 1 | Scenario 2 |
|---|---|---|
| Particle spacing dp (mm) | 10.0 | 7.5 */10.0/15.0 */20.0 * |
| Number of particles (million) | 8.40 | 26.81 */11.74/3.52 */1.66* |
| Smoothing kernel (-) | Cubic spline kernel | |
| Smoothing length/particle spacing (-) | 1.732 | |
| Density correction (-) | Delta-SPH algorithm | |
| Delta-SPH coefficient (-) | 0.1 | |
| Dissipative term (-) | Artificial viscosity | |
| Artificial viscosity coefficient (-) | 0.05 | |
| (kg/m3) | 1000 | |
| (-) | 7 | |
| (-) | 0.5 | |
| Coefficient of speed of sound (-) | 17 | |
| Boundary conditions (BCs) (-) | Dynamic BCs | |
| Time integration algorithm (-) | Verlet scheme | |
| Number of time steps applied to Eulerian equations (-) | 40 | |
| CFL number (-) | 0.2 | |
| Physical time (s) | 3.0 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, H.; Ruffini, G.; Heller, V.; Chen, S. A Numerical Landslide-Tsunami Hazard Assessment Technique Applied on Hypothetical Scenarios at Es Vedrà, Offshore Ibiza. J. Mar. Sci. Eng. 2018, 6, 111. https://doi.org/10.3390/jmse6040111
Tan H, Ruffini G, Heller V, Chen S. A Numerical Landslide-Tsunami Hazard Assessment Technique Applied on Hypothetical Scenarios at Es Vedrà, Offshore Ibiza. Journal of Marine Science and Engineering. 2018; 6(4):111. https://doi.org/10.3390/jmse6040111
Chicago/Turabian StyleTan, Hai, Gioele Ruffini, Valentin Heller, and Shenghong Chen. 2018. "A Numerical Landslide-Tsunami Hazard Assessment Technique Applied on Hypothetical Scenarios at Es Vedrà, Offshore Ibiza" Journal of Marine Science and Engineering 6, no. 4: 111. https://doi.org/10.3390/jmse6040111