2.1. IPMSM Torque Equation
Equation (1) shows the torque of IPMSM. Among the variables included in the equation, is magnetic torque, is reluctance torque, is pole pairs, is armature flux linkage by permanent magnet, is input current, β is current phase angle, is d-axis inductance, and is the q-axis inductance.
As can be seen from Equation (1), IPMSM can use reluctance torque as well as magnetic torque, and it indicates that the reluctance torque increases as the difference in d and q-axis inductance increases. Therefore, in this paper, a study was conducted on the shape of the rotor that can increase the reluctance torque to increase the speed of the motor.
2.2. Principle of Improving Reluctance Torque
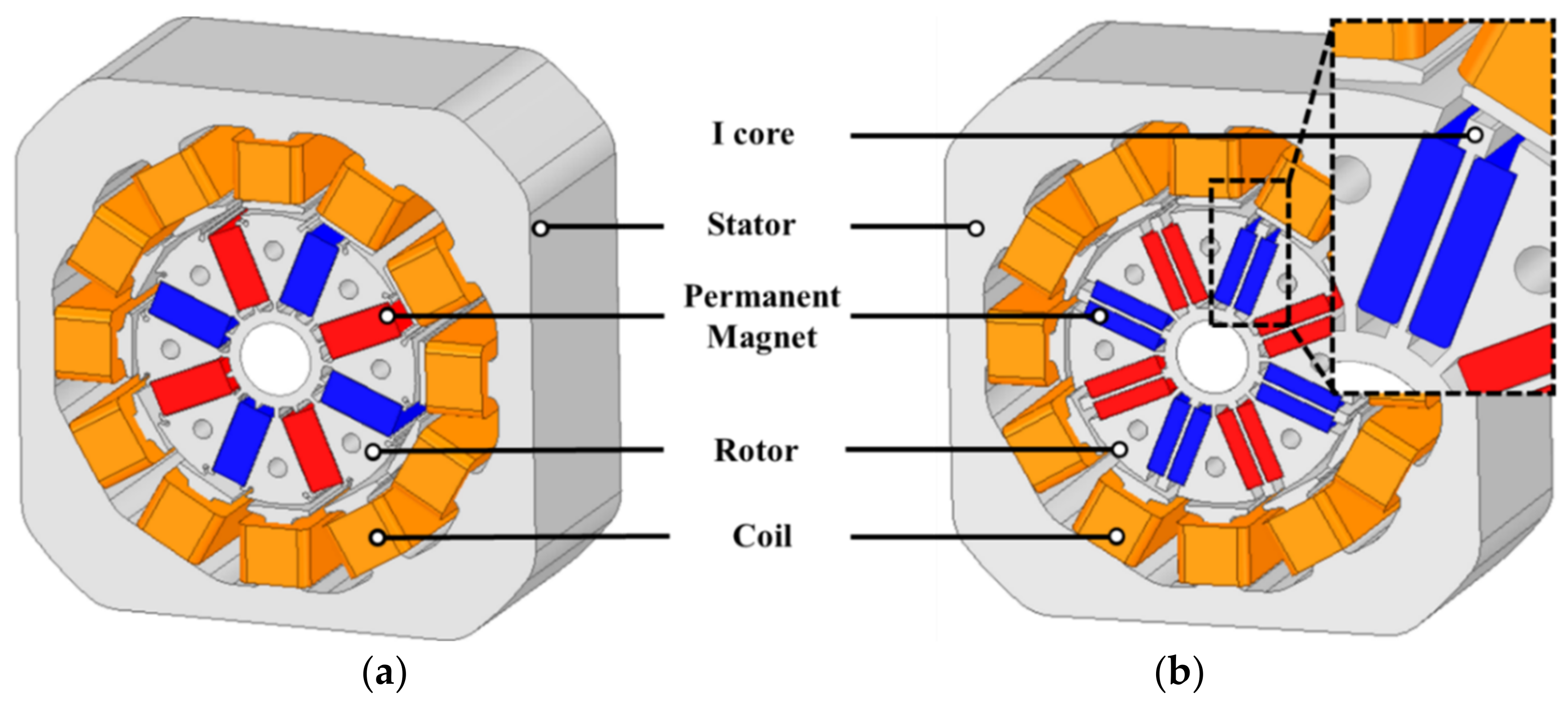
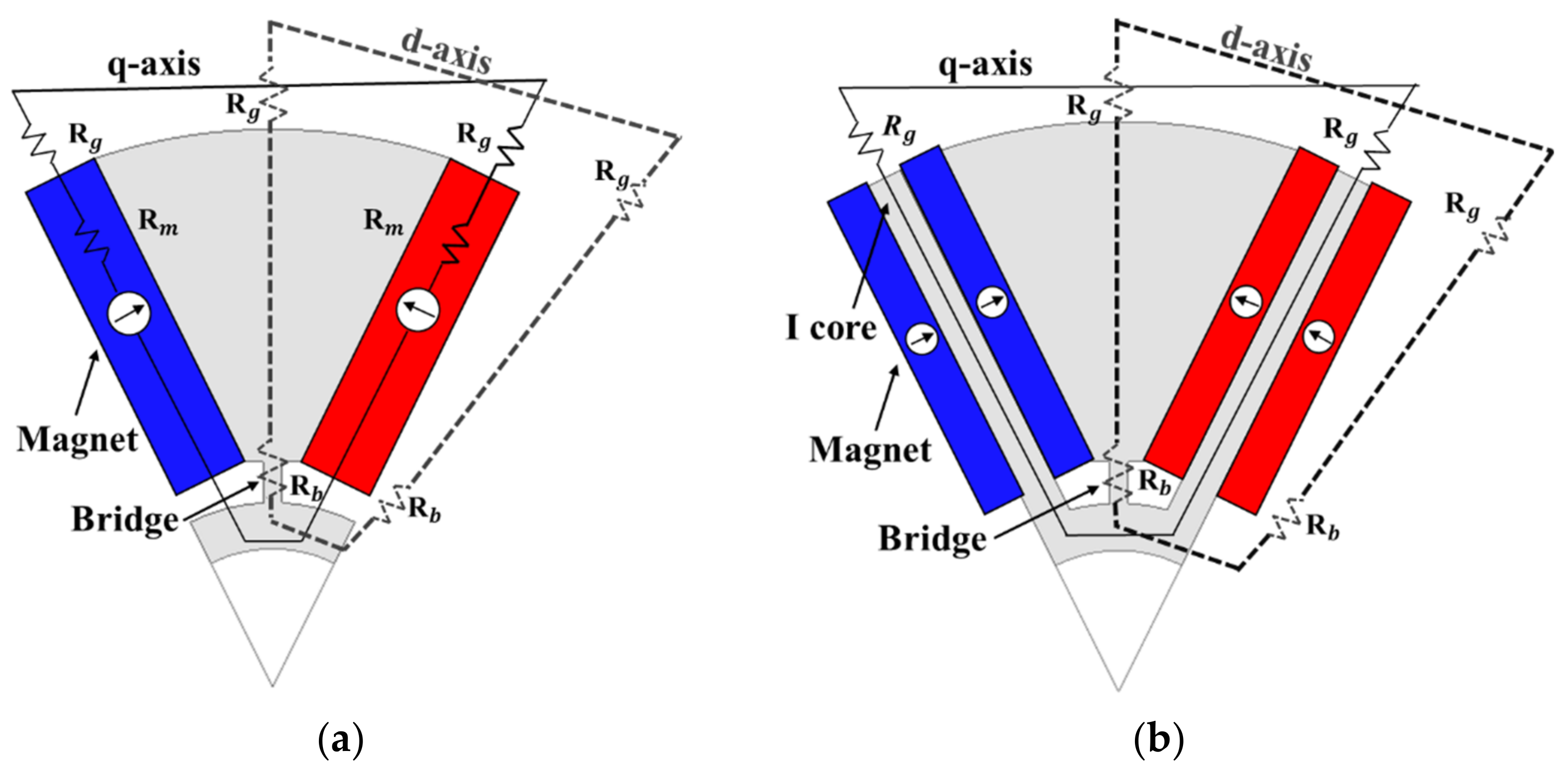
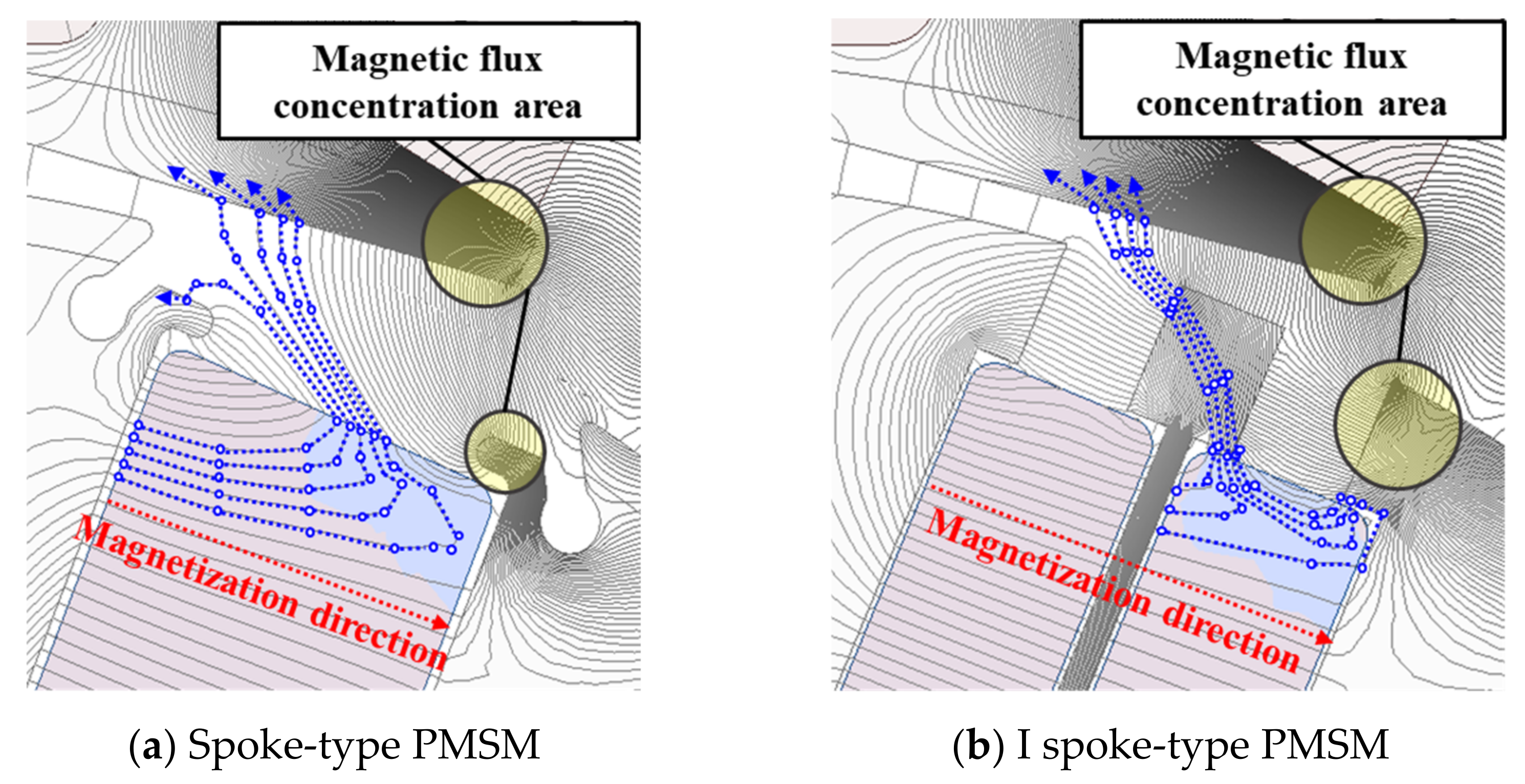
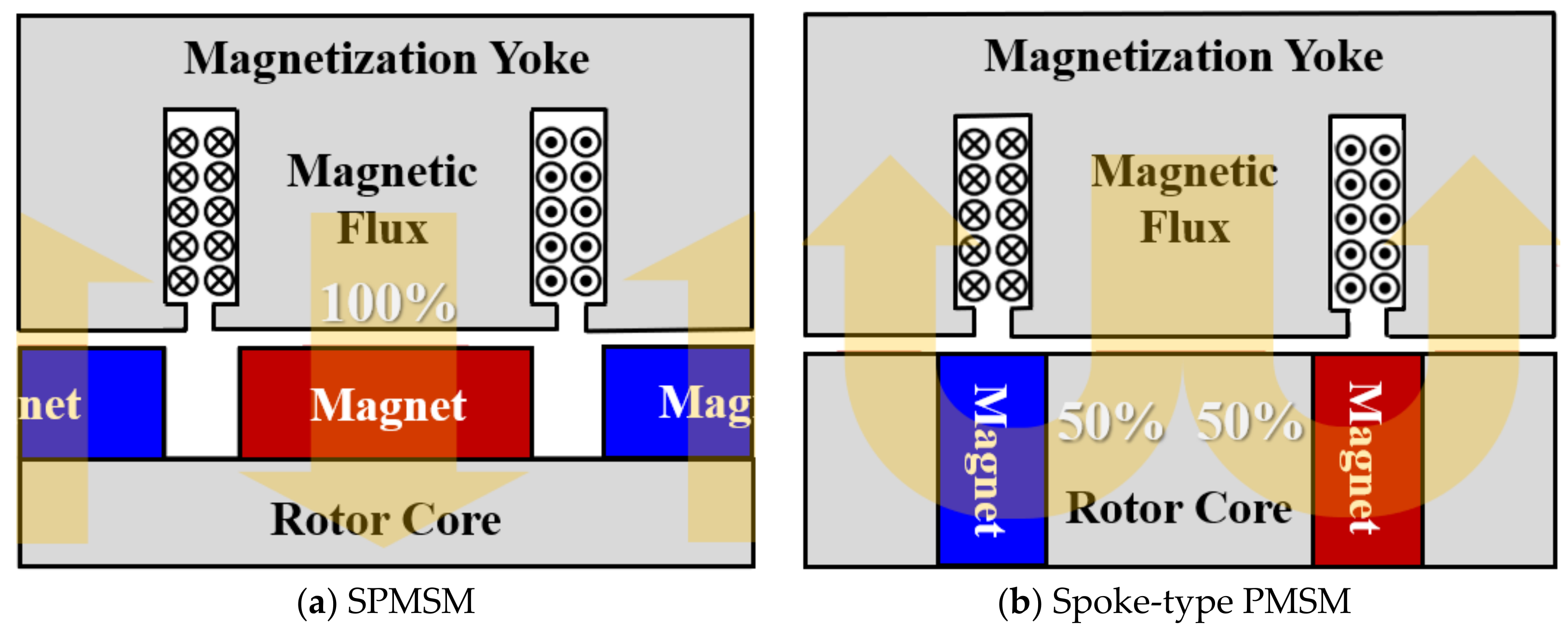
Figure 3a is the conventional spoke-type PMSM, and
Figure 3b is the magnetic equivalent circuit (MEC) of the I spoke-type PMSM proposed in this paper. Among the variables included in the above equations,
,
are d, q-axis inductance of spoke-type PMSM, and
,
are d, q-axis inductance of I spoke-type PMSM. Furthermore,
,
,
are the resistance of air gap, bridge, and PM.
Both motors have the same d-axis path, but there is difference in q-axis path. A permanent magnet is placed on the q-axis path of the conventional spoke-type PMSM, and the iron core is located in the case of the I spoke-type PMSM. Since the magnetic resistance of an iron core is significantly lower compared to that of a permanent magnet, I spoke-type PMSM has a higher q-axis inductance as expressed in Equation (7).
As a result, there is no difference in the d-axis inductance between the two models, but the q-axis inductance is higher in the proposed model, so the proposed model has a higher saliency ratio. It is expressed that the reluctance torque increases as the difference between the two inductances increases in Equation (3). Therefore, the I spoke-type PMSM has a higher reluctance torque than the conventional model.
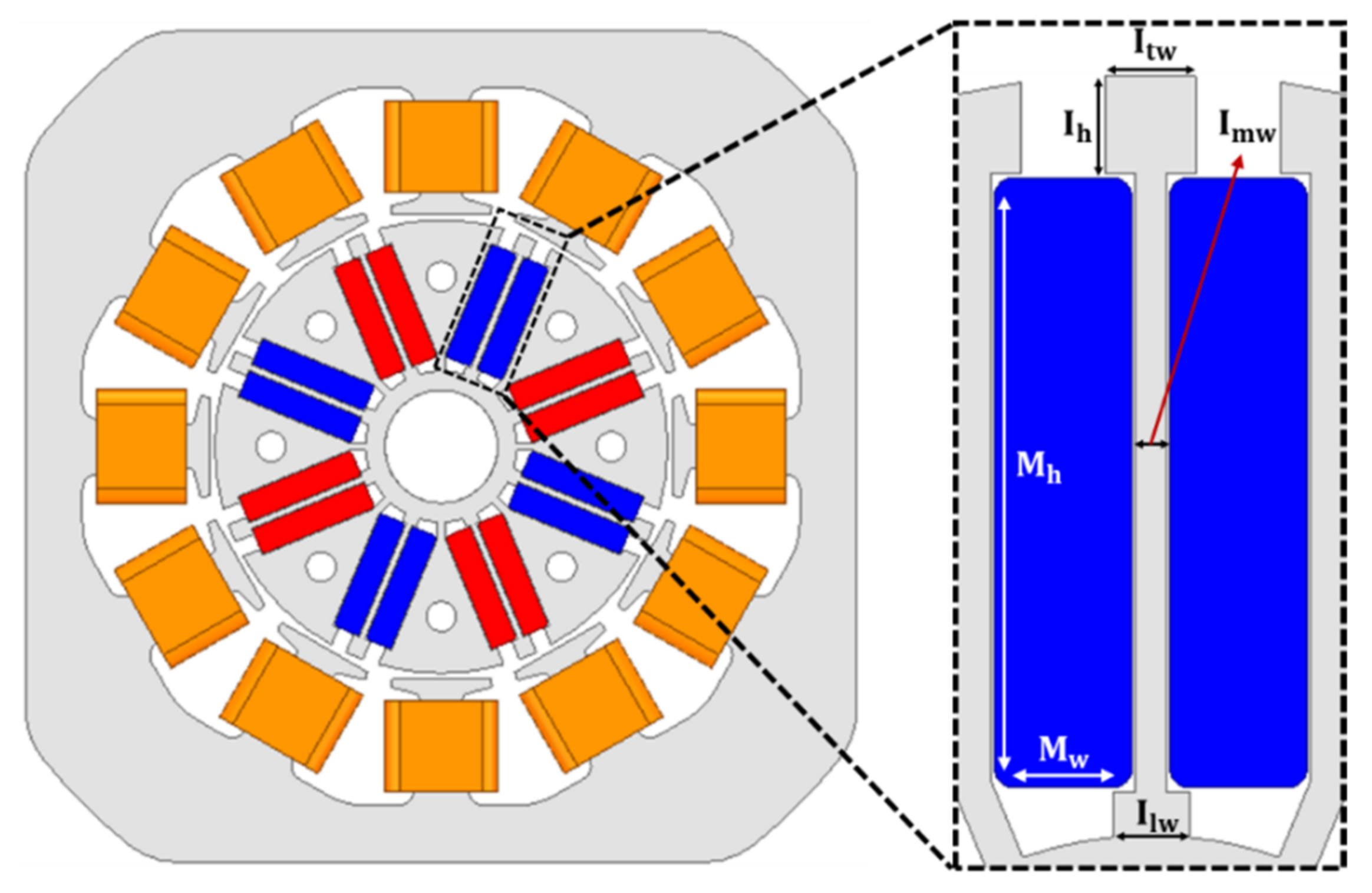
2.3. Basic Model of I Spoke-Type PMSM
Figure 4 is the basic design model of I spoke-type PMSM. Among the variables included in the above equations,
,
, and
are the widths of the top, middle, and bottom of the I-core, and
is the height of the top of the I-core. In addition,
and
represent the height and width of one permanent magnet.
Increasing the length of and supports the permanent magnet stably. However, this simultaneously acts as a leakage path of the flux and lowers the power density of the motor. Therefore, in this paper, the lengths of and are selected as 2.2 mm, which is the minimum length that can support the permanent magnet while minimizing the leakage path.
and are key factors in increasing q-axis inductance. Therefore, was selected as 2.5 mm and as 0.7 mm to ensure sufficient reluctance torque within the range not exceeding the rotor diameter. For the same magnet usage as the conventional spoke-type PMSM, was selected as 16.05 mm and was selected as 3.6 mm.
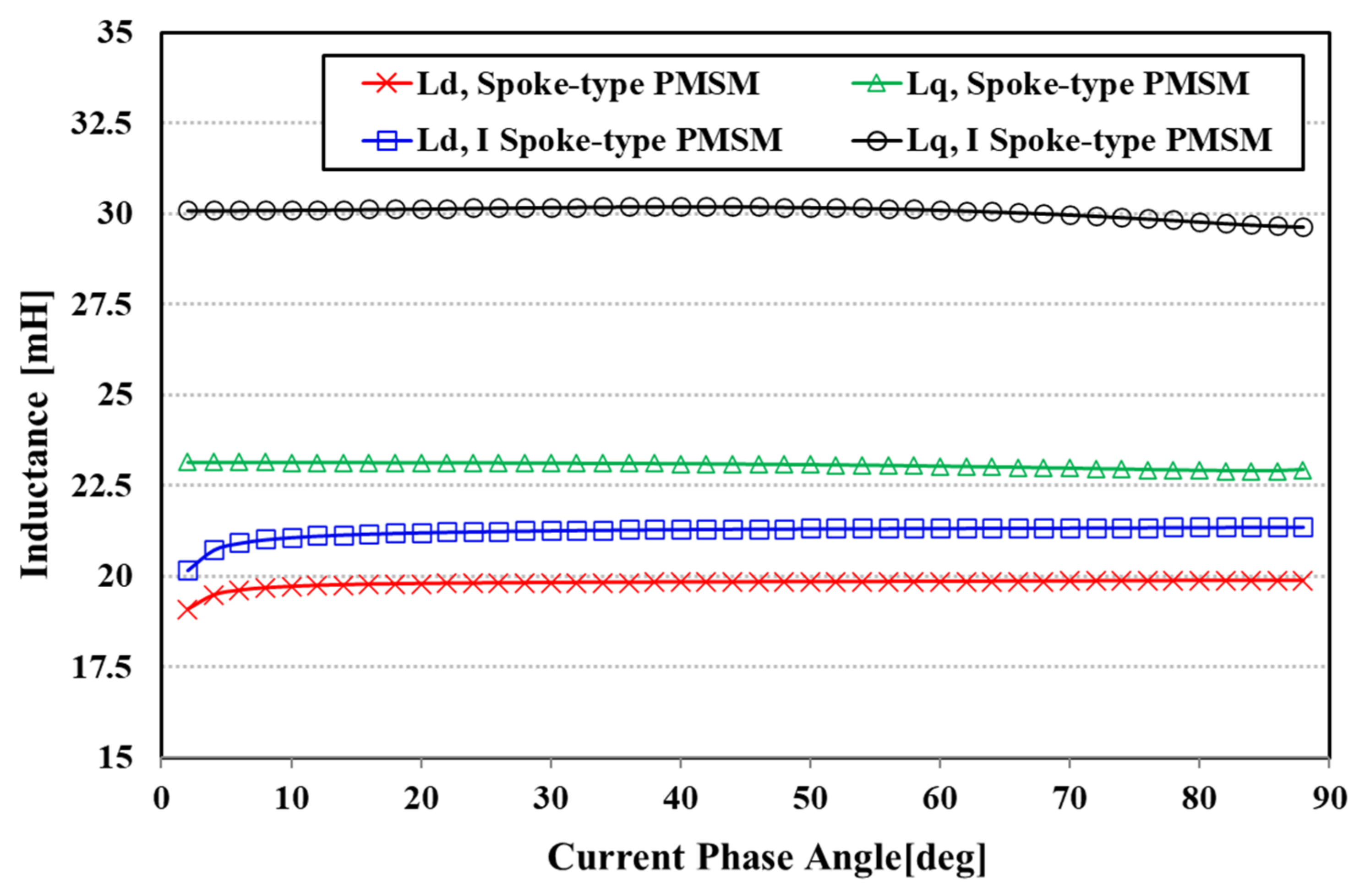
2.4. FEA Analysis
Figure 5 shows the d and q-axis inductance of two motors according to the current phase angle change. In the case of the I spoke-type PMSM, it indicates that the q-axis inductance is greatly increased. This is because the iron core with low magnetic resistance is located in the q-axis path as shown in the MEC in
Figure 3.
In the case of d-axis inductance, there is a slight difference between the actual analysis result and the MEC result. This is because a certain amount of flux flows through the iron core between the permanent magnets, so the I spoke-type PMSM has slightly higher d-axis inductance. However, since the increase in q-axis inductance compared to the increase in d-axis inductance is large, the I spoke-type PMSM has a higher saliency ratio and a higher reluctance torque.
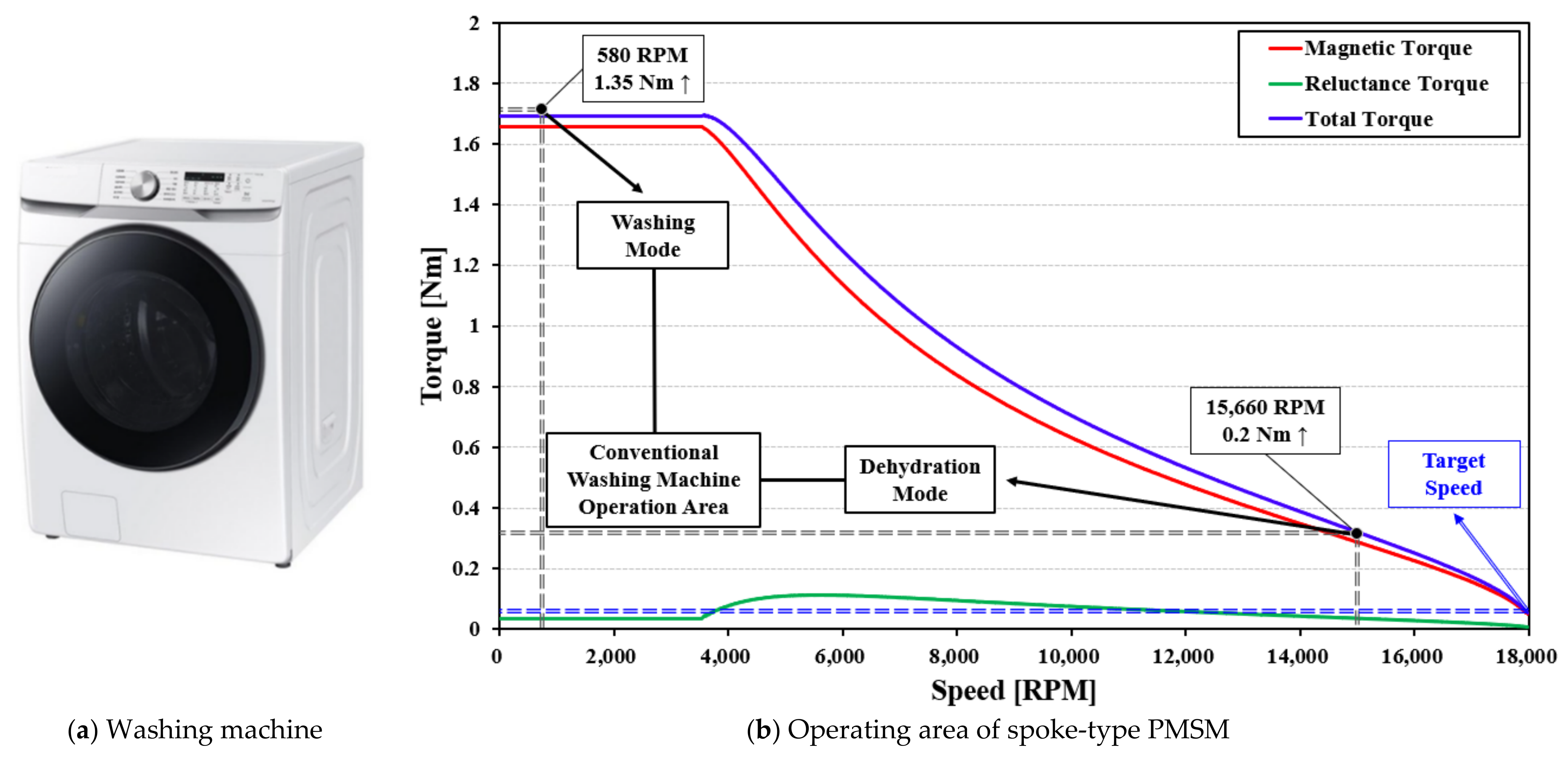
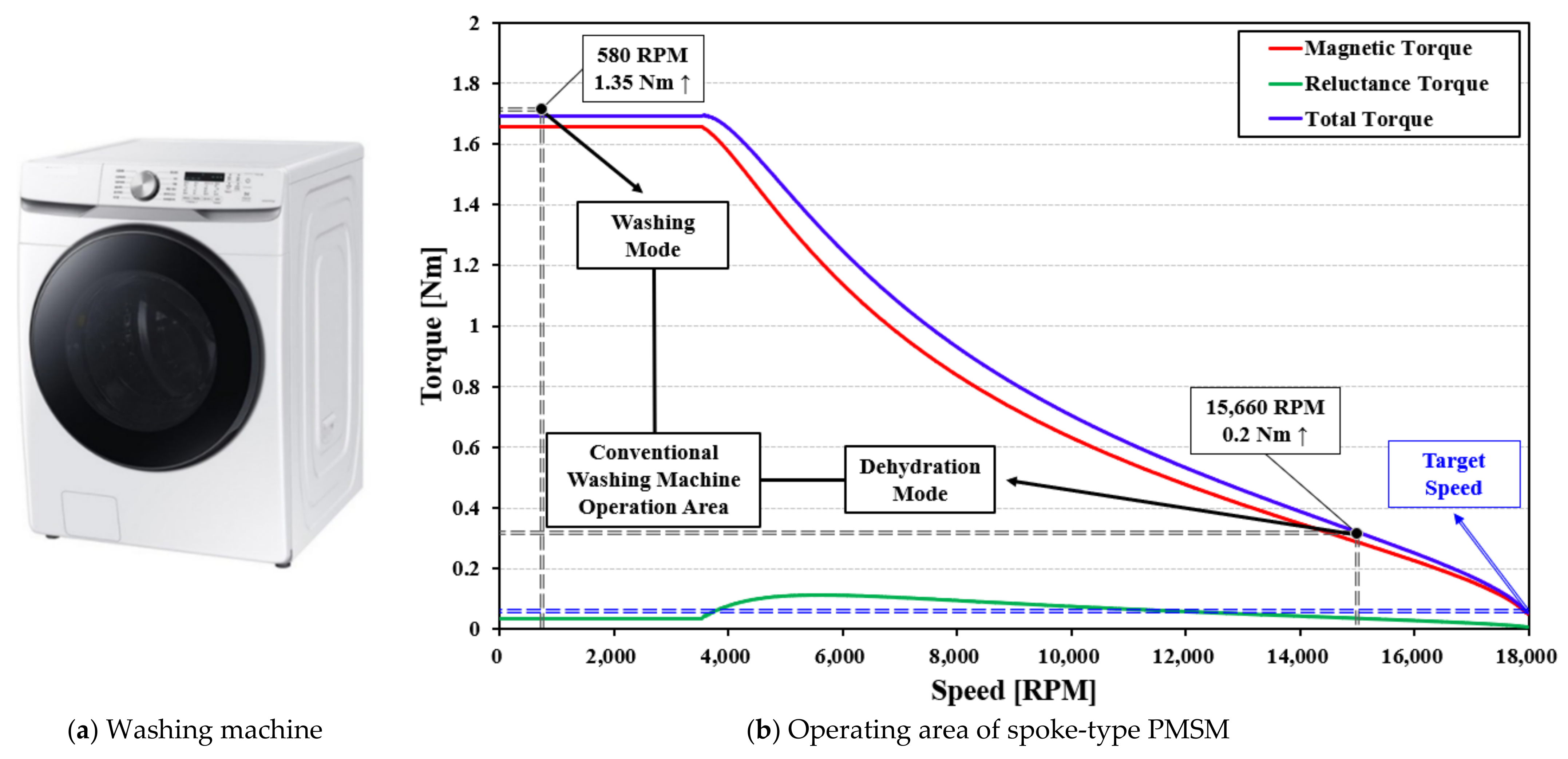
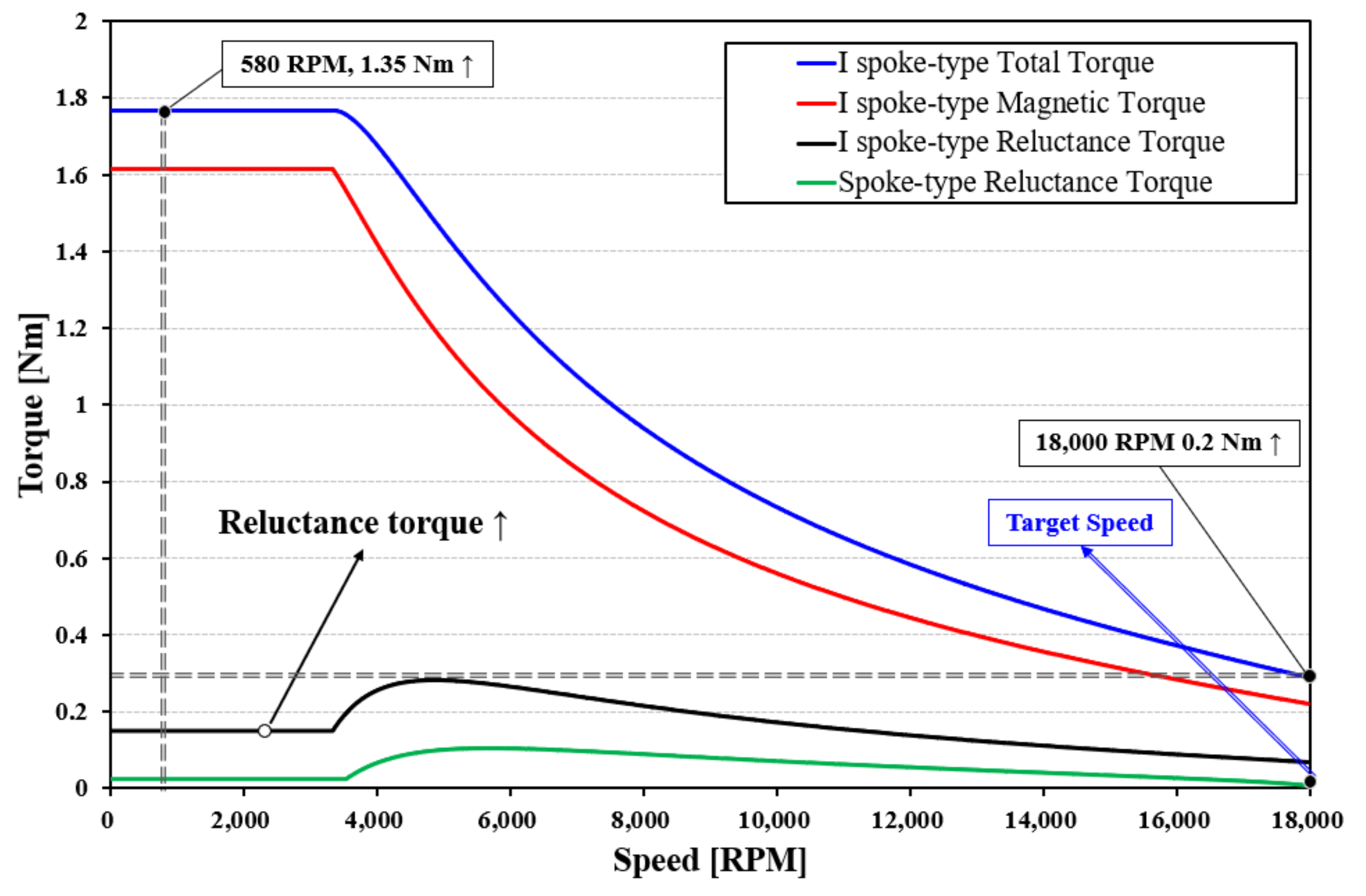
Figure 6 is the torque-speed characteristic curve of I spoke-type PMSM, and
Figure 7 is the result of comparing the torque-speed characteristics of both models. In summary, the I spoke-type PMSM has a higher saliency ratio than the conventional spoke-type PMSM. As a result,
Figure 6 shows that the reluctance torque of the I spoke-type PMSM increased significantly. Therefore,
Figure 7 shows that the conventional model did not satisfy the target torque of 0.2 Nm at 18,000 RPM, but the proposed model has a torque of 0.2 Nm or more.
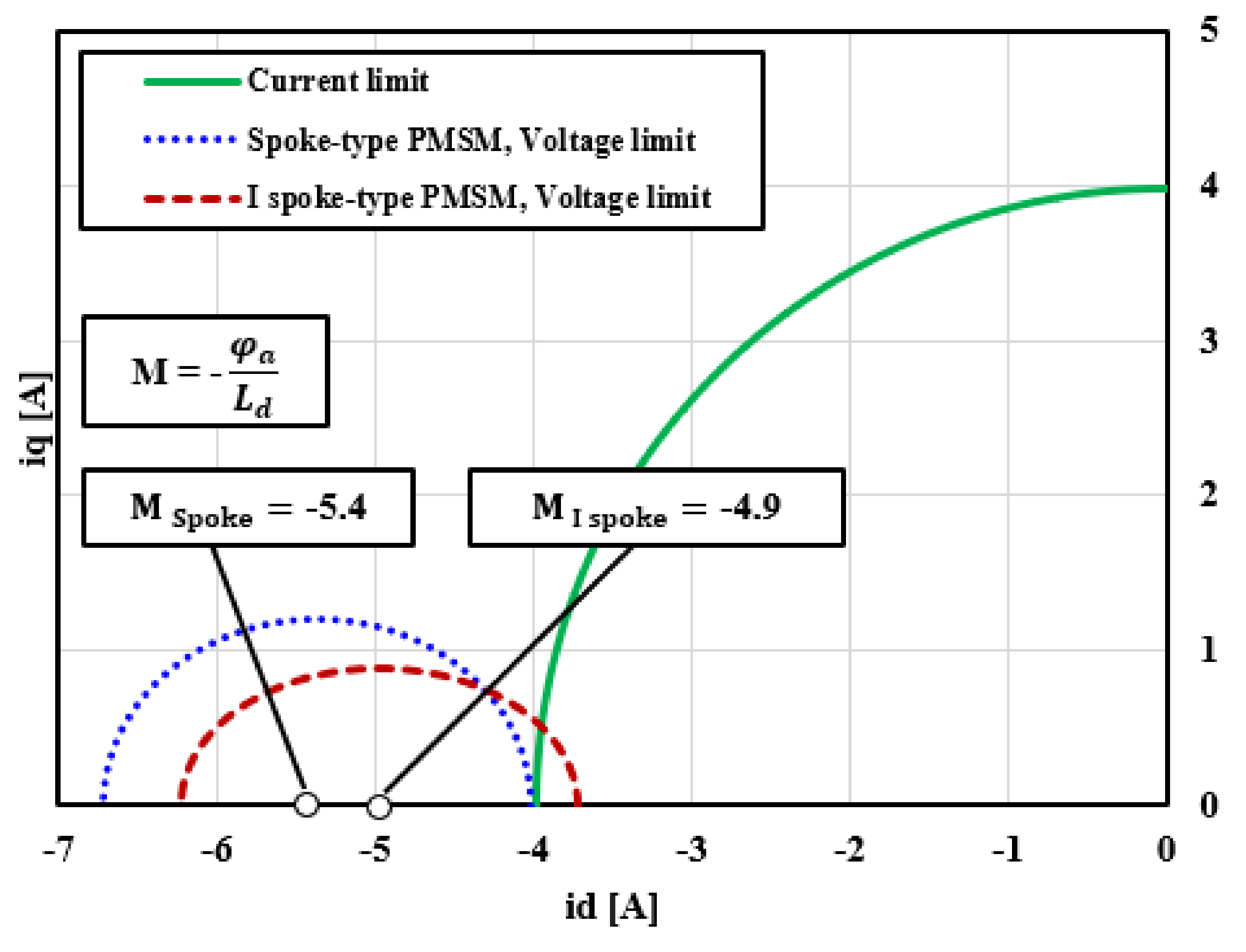
Figure 8 shows the current limit circle of the two models and the voltage limit ellipse at 18,000 RPM. The midpoints of each voltage limit ellipses are marked by
and
, the blue line represents the voltage limit ellipse of the conventional spoke-type PMSM, the red line represents the voltage limit ellipse of the I spoke-type PMSM, and the green line represents the current limit circle.
Figure 8 shows that there is a difference between the voltage limit ellipse weight of the conventional spoke-type PMSM and the I spoke-type PMSM. Equation (8) supports the results of
Figure 8 by showing that the midpoint position of the voltage limit ellipse is inversely proportional to the d-axis inductance and proportional to the flux linkage. When comparing the d-axis inductance shown in
Figure 5, it indicates that the I spoke-type PMSM has higher inductance than the conventional spoke-type PMSM. Therefore, the midpoint of the voltage limit ellipse of the I spoke-type PMSM is located closer to the origin than the conventional spoke-type PMSM.
The area where the motor can be operated can only be indicated at the intersection of the voltage limit ellipse and the current limit circle. With the movement of point M, the voltage limit ellipse of the I spoke-type PMSM has an intersection with the current limit circle, but the conventional spoke-type PMSM does not have an intersection. Therefore, as shown in
Figure 8, the conventional spoke-type PMSM at 18,000 RPM cannot be operated because the intersection of voltage limit ellipse and current limit circle does not exist. On the other hand, the I spoke-type PMSM can operate a motor because the intersection of the ellipse and the circle exists.
Table 2 shows the motor specifications used in FEA, and
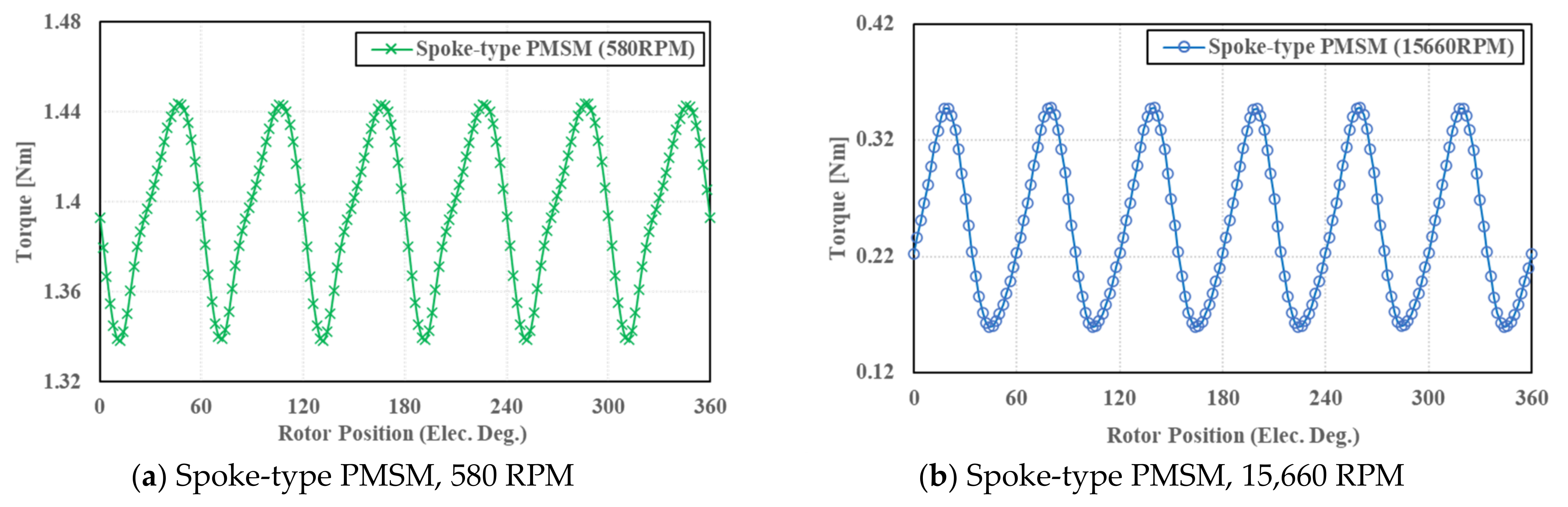
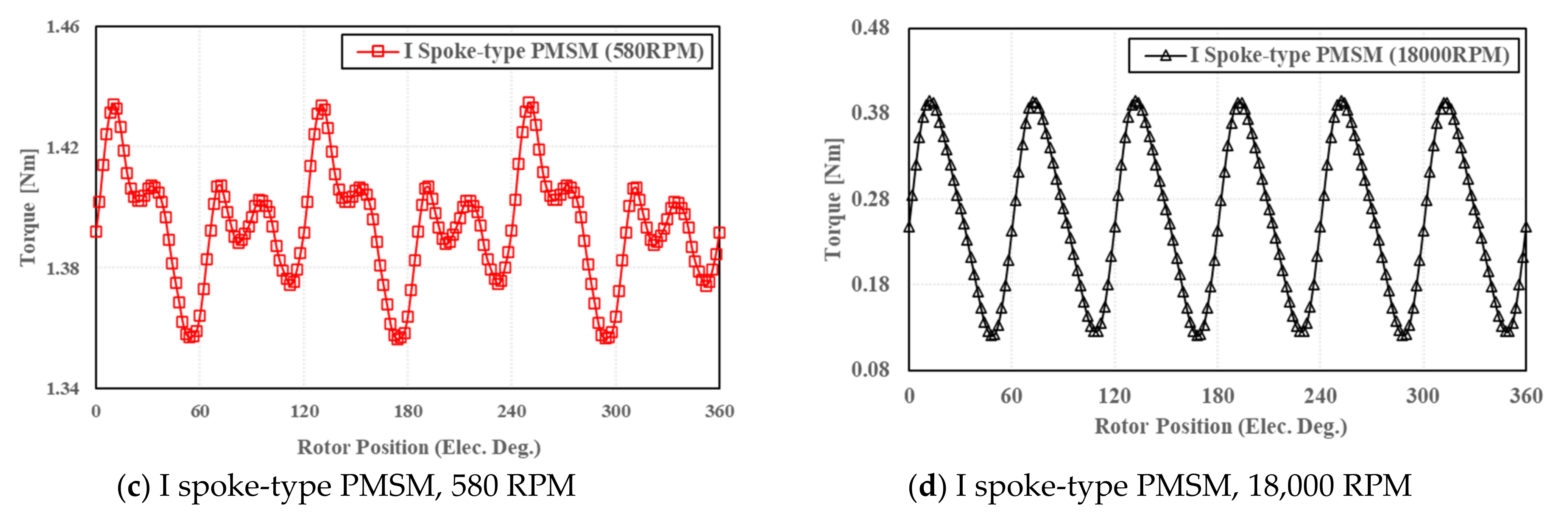
Table 3 shows the torque ripple ratio of each of the two motors.
Table 3 provides information that the spoke-type PMSM generates 7.6% torque ripple at 580 RPM and 76.4% at 15,660 RPM. Moreover, the I spoke-type PMSM has 5.6% torque ripple at 580 RPM and 105.8% torque ripple at 18,000 RPM. The torque ripple ratio of the I spoke-type PMSM is higher than that of the spoke-type PMSM in the high-speed operation area because of the high amount of reluctance torque used.
Figure 9,
Figure 10 and
Figure 11 are FEA results for torque ripple, loss, and efficiency at each operating point. The T-N curve shows the information that the spoke-type PMSM has a maximum operable speed of 15,660 RPM. On the other hand, the I spoke-type PMSM can use reluctance torque and can be operated at 18,000 RPM or higher. Therefore,
Table 3 provides torque ripple, loss, and efficiency results of 580 RPM and 15,660 RPM for spoke-type PMSM and torque ripple, loss, and efficiency at 580 RPM and 18,000 RPM for I spoke-type PMSM.
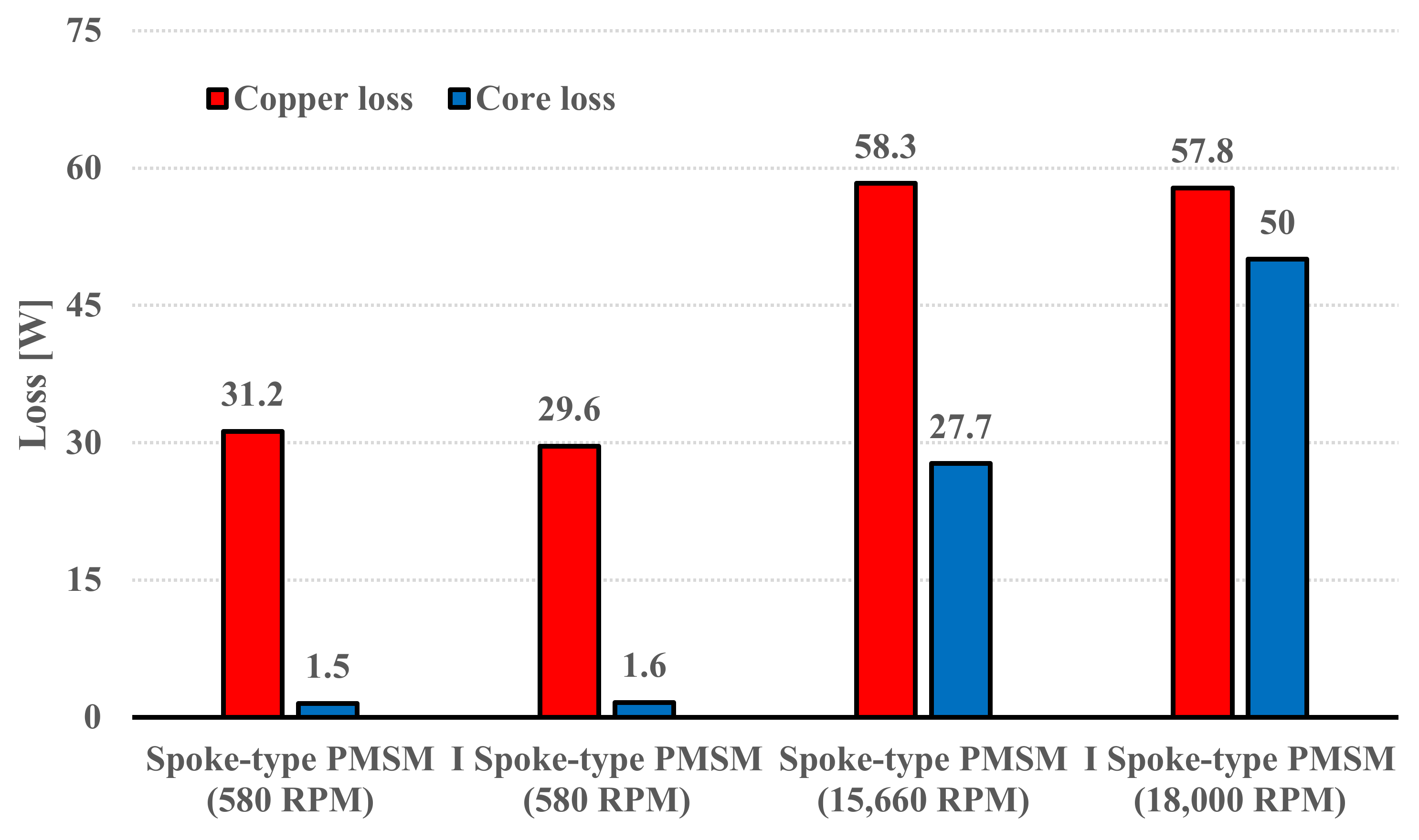
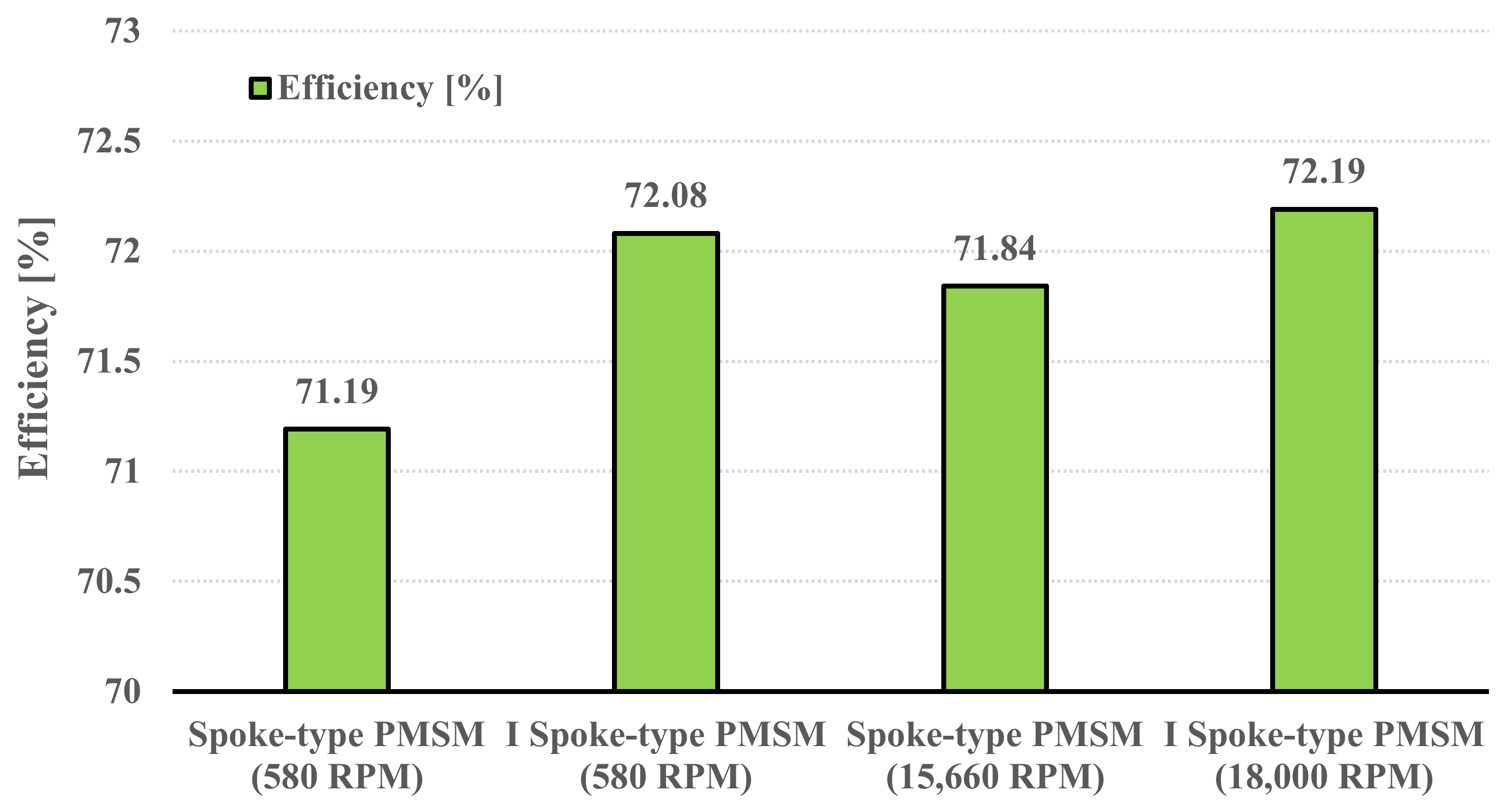
Figure 10 and
Figure 11 show the loss and efficiency of the two motors due to the change in the operating area. These results indicate the loss and efficiency at the above two points because the target operating speed must satisfy 1.35 Nm at 580 RPM and 0.2 Nm at 18,000 RPM. Compared with these results, the spoke-type PMSM was compared with loss and efficiency at 15,660 RPM because the maximum operable speed is 15,660 RPM.
Figure 10 shows that the I spoke-type PMSM has lower copper losses than the spoke-type PMSM because it uses additional reluctance torque. In the case of iron loss, since it is proportional to the speed, the iron loss appears low in the low-speed operation range of 580 RPM.
On the other hand, iron loss increases in the high-speed operation area. Since the I spoke-type PMSM operates at 18,000 RPM, the iron loss is higher than the spoke-type PMSM measured at 15,660 RPM.
Figure 11 shows the efficiency of both motors. For high efficiency, either loss is reduced or output is increased. At 580 RPM, the I spoke-type PMSM has lower copper losses than the spoke-type PMSM. Therefore, the I spoke-type PMSM showed higher efficiency. In the case of high-speed operation, the I spoke-type PMSM has a large loss due to high iron loss, but the I spoke-type has higher output due to the increased driving speed.
Therefore, the efficiency of the I spoke-type PMSM is higher than that of the spoke-type PMSM. Finally, the I spoke-type PMSM can operate at higher speeds and has higher efficiency compared to the spoke-type PMSM.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}