
Current Sensorless Pole-Zero Cancellation Output Voltage Control for Uninterruptible Power Supply Systems with a Three-Phase Inverter

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
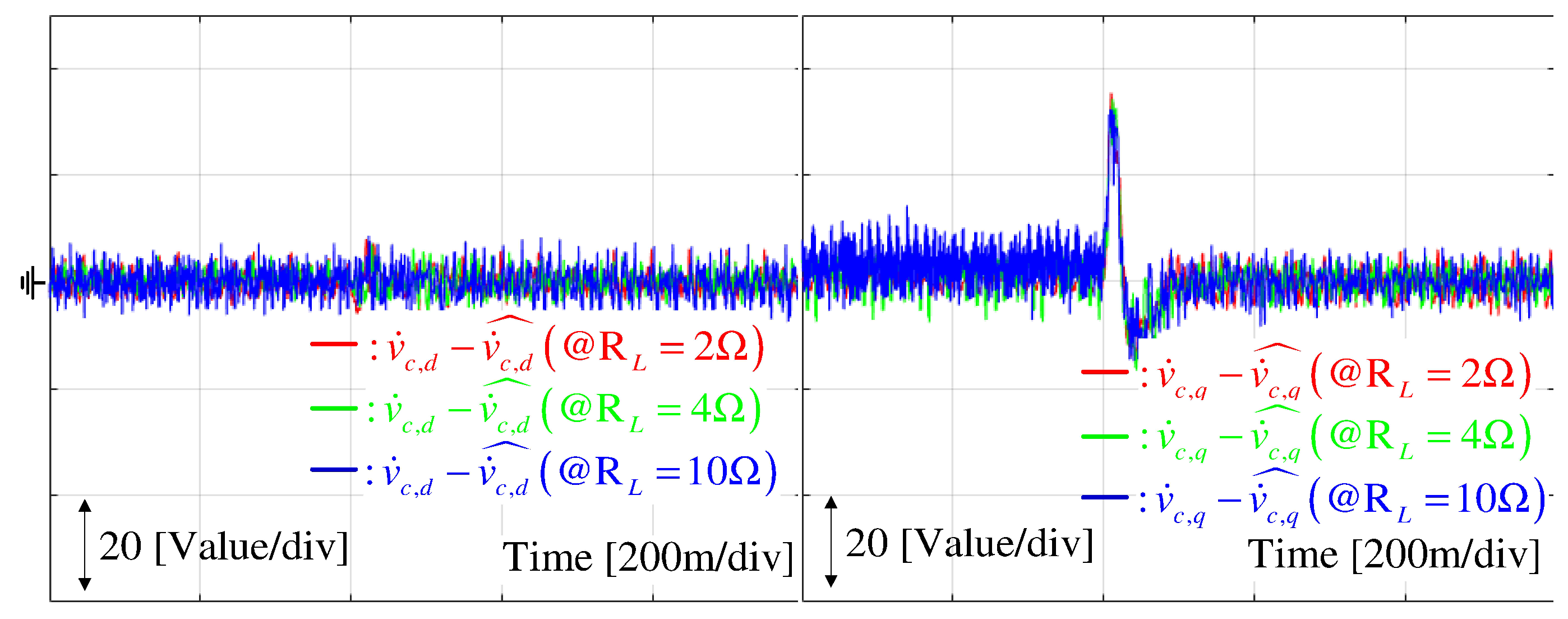
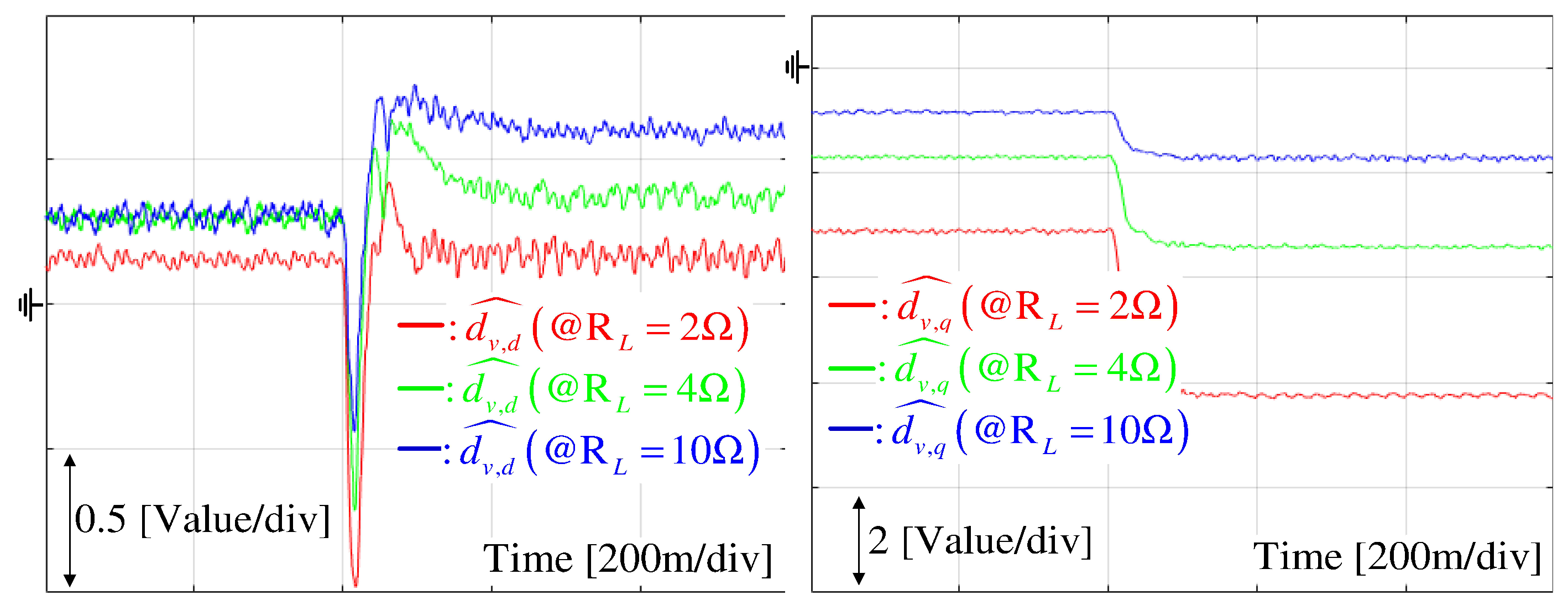
- For (P2) and (P4): The output voltage derivative observer is built by combining the Luenberger observer and DOB design techniques without requiring the true system parameter information; this eliminates the need of current feedback.
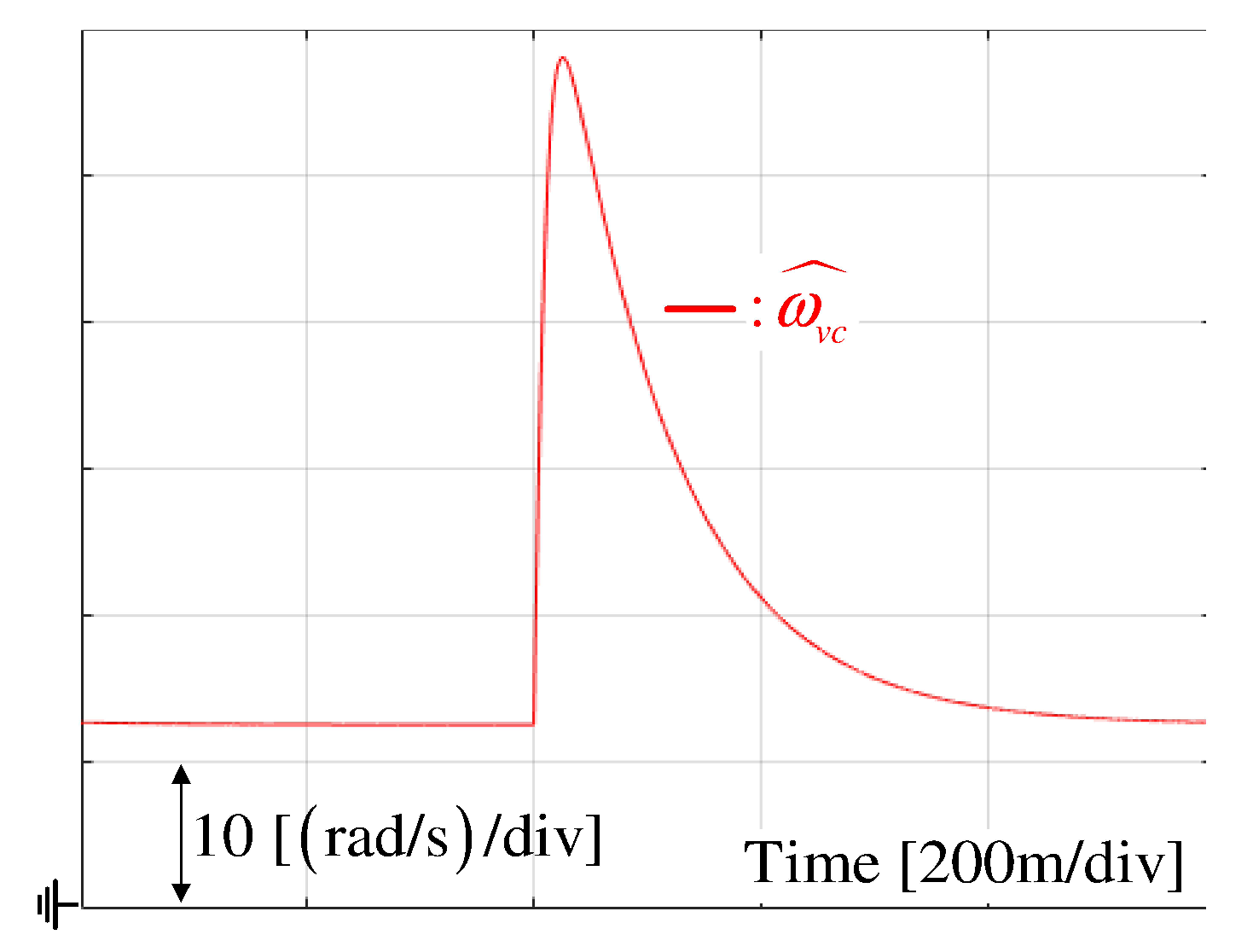
- For (P3): The online self-tuner adjusts the desired dynamics to implement the feedback-loop adaptation according to the transient and steady-state operation modes.
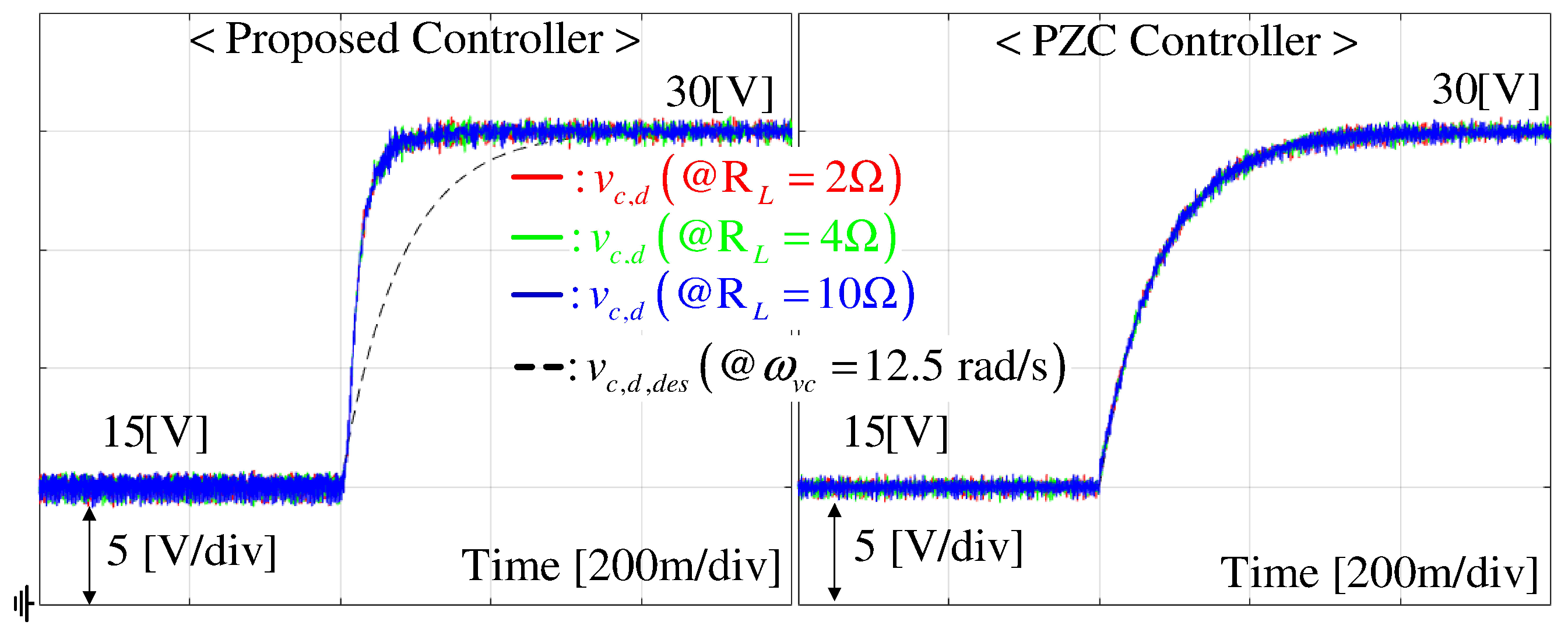
- For (P1) and (P4): The injection of the active damping term and special form of feedback gain for the DOB-based proportional-derivative (PD) controller result in the stable PZC to render the closed-loop system order to be 1.
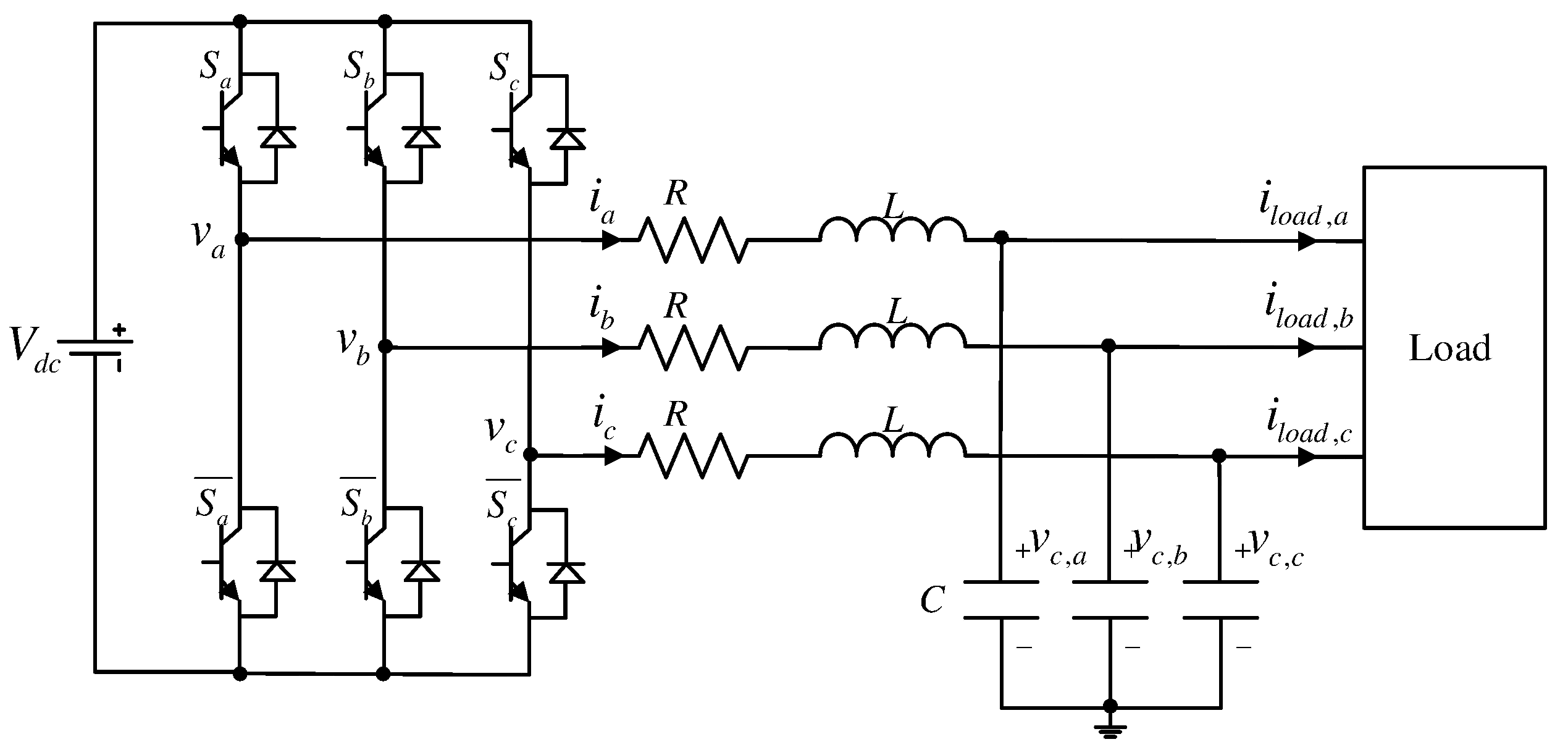
2. Uninterruptible Power Supply System Dynamics
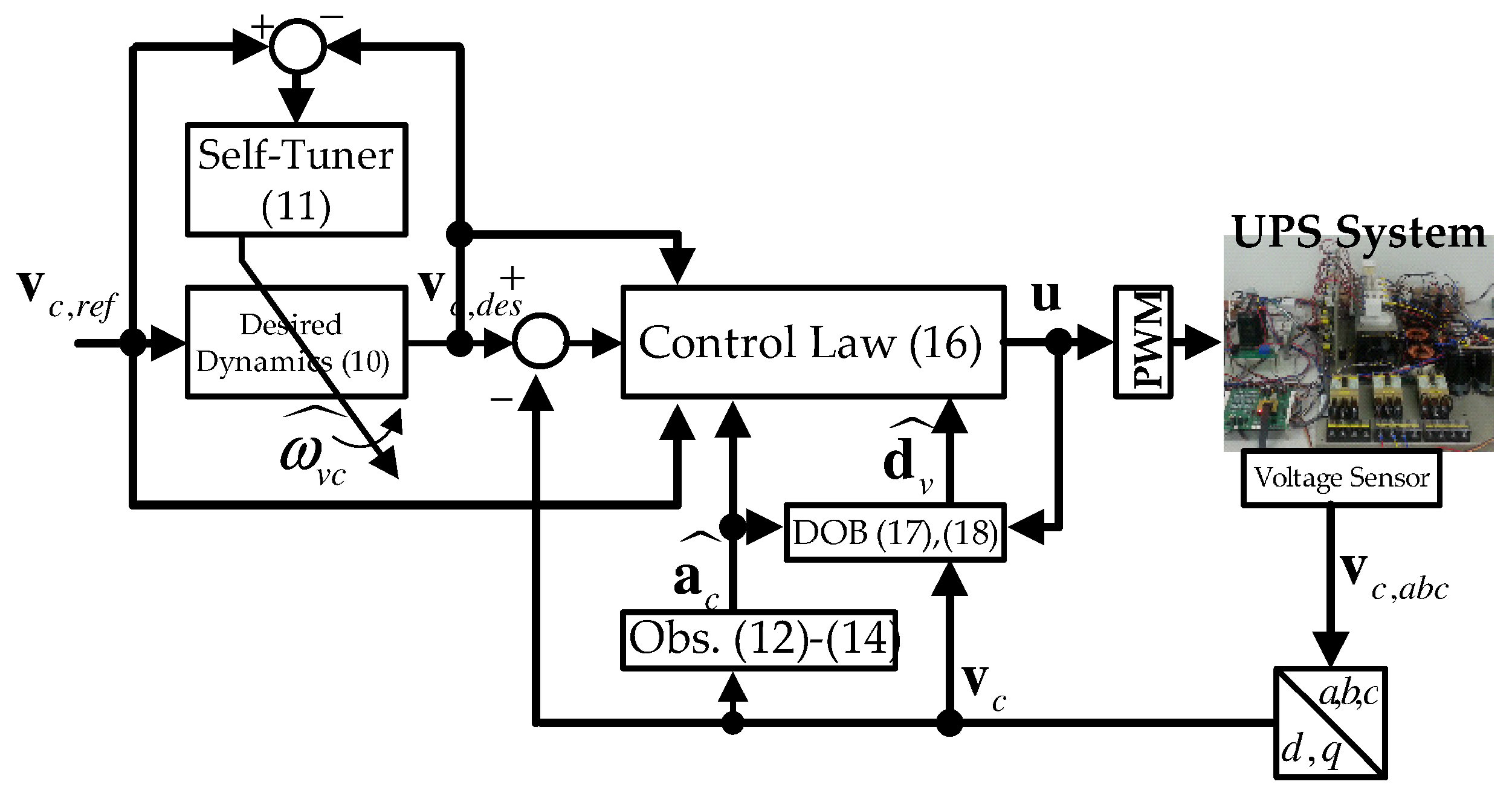
3. Proposed Control Algorithm
3.1. Self-Tuner
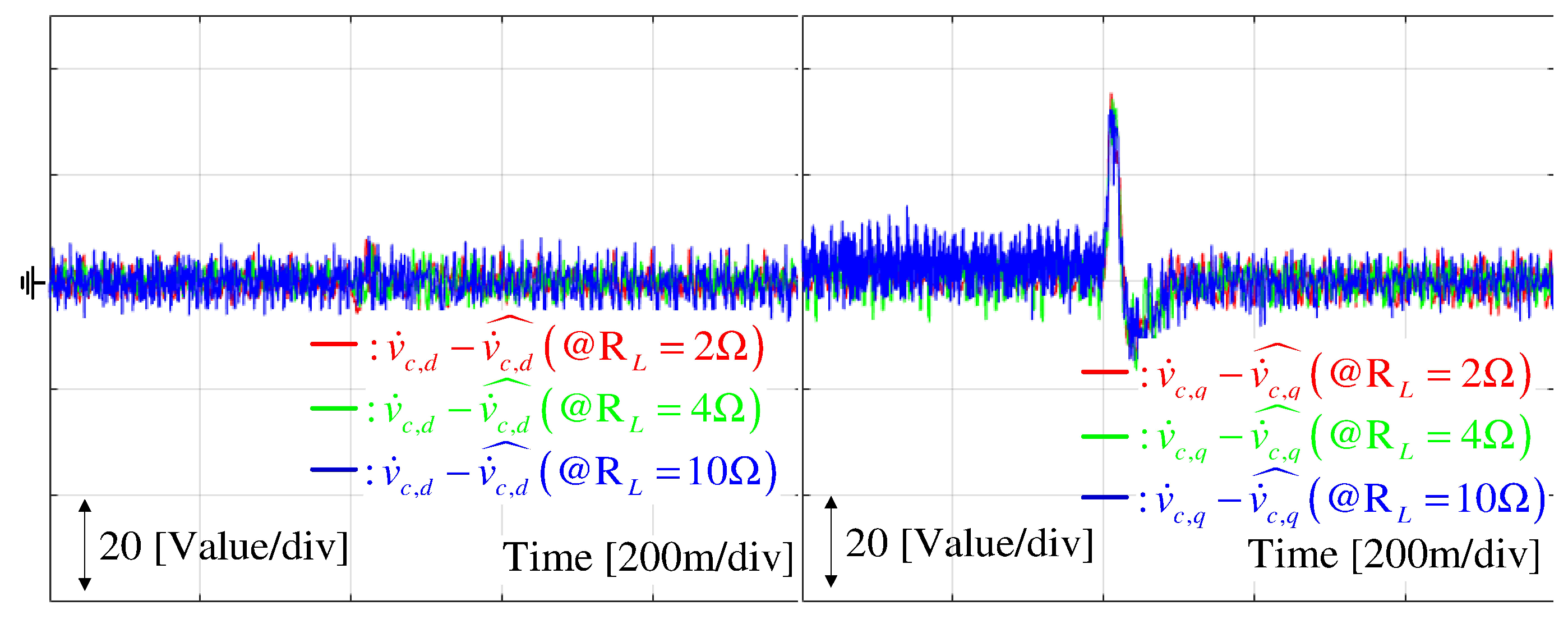
3.2. Observer
3.3. Control Law
4. Analysis
4.1. Self-Tuner
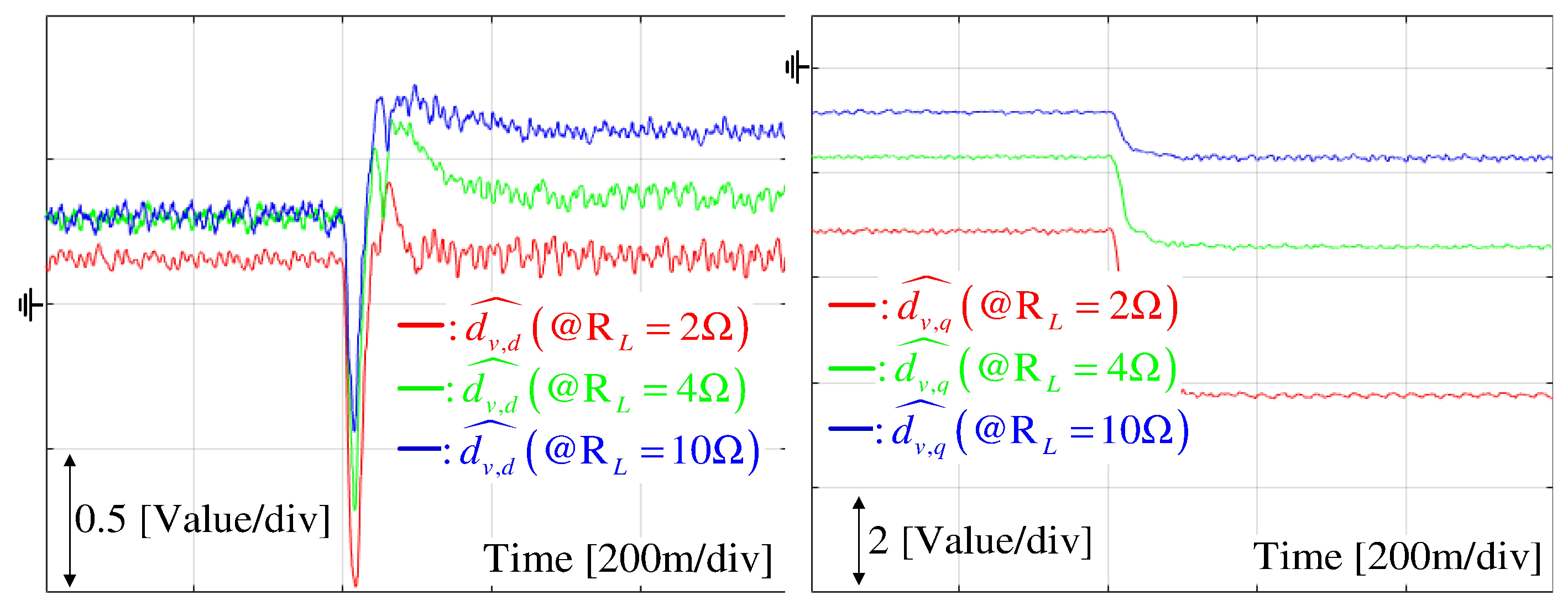
4.2. Observer and DOB
4.3. Control Loop
- Observer:
- (Lemma 3) Choose and such that satisfies the desired observer error dynamics and .
- DOB:
- (Lemma 4 and Remark 2) Choose for a given specification , .
- Controller:
- (Lemma 5 and Theorem 1) For a given specification in the nominal system (8), increase to obtain the error dynamics for some choice .
- Self-tuner:
- (Lemma 2) After specifying with , increase and considering the maximum closed-loop bandwidth () from the hardware specification.
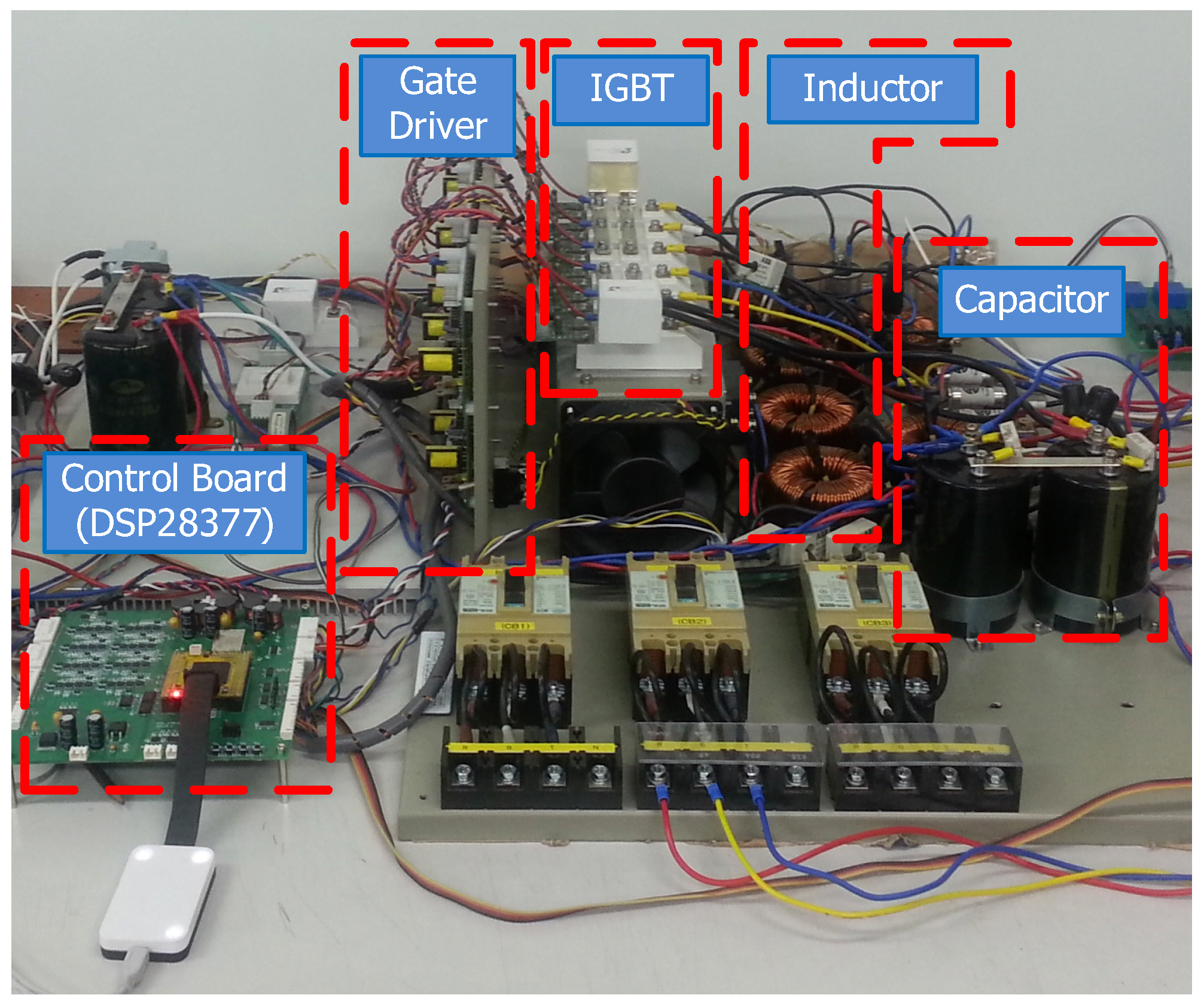
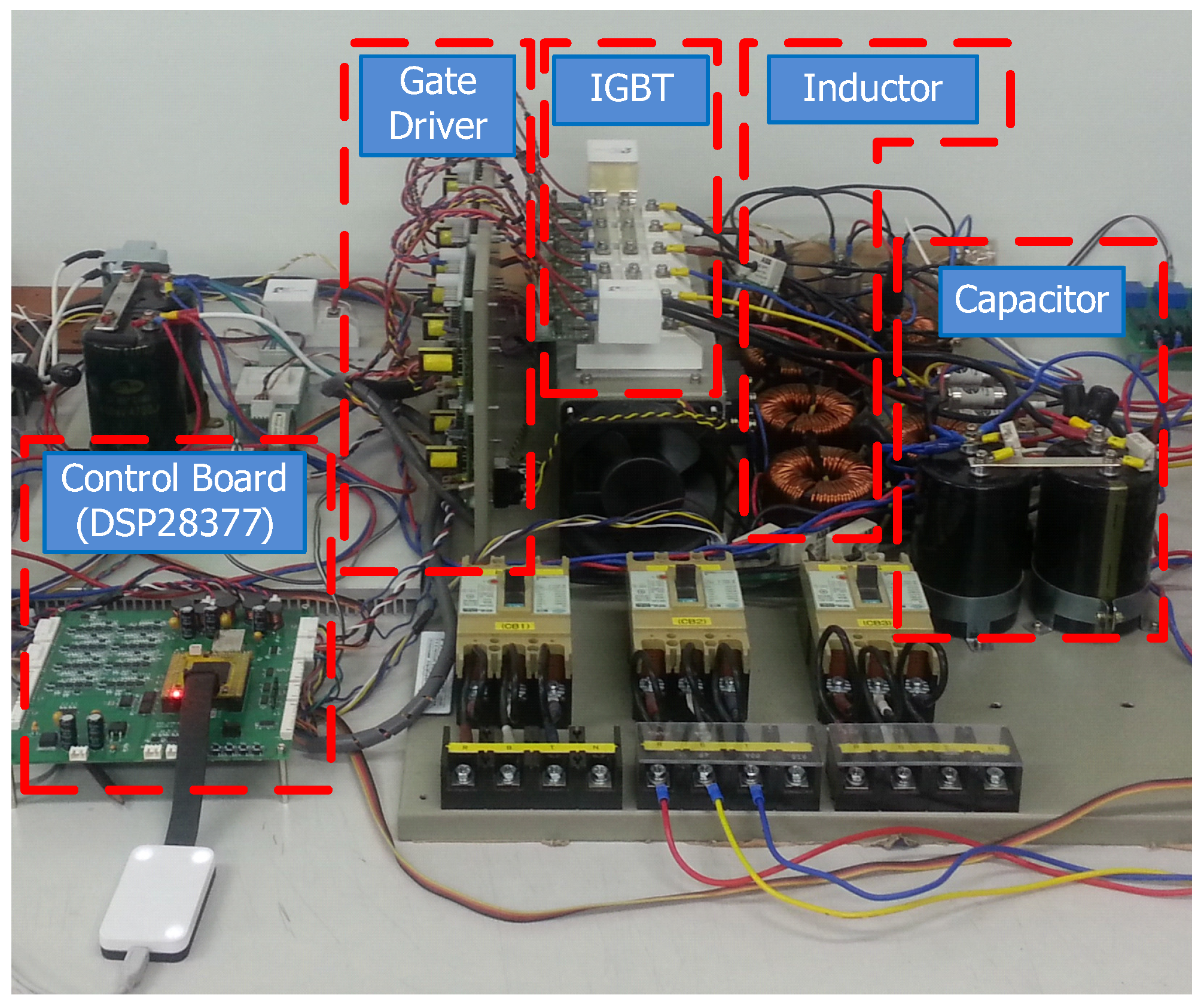
5. Experimental Results
- (Outer-loop)
- (Inner-loop)
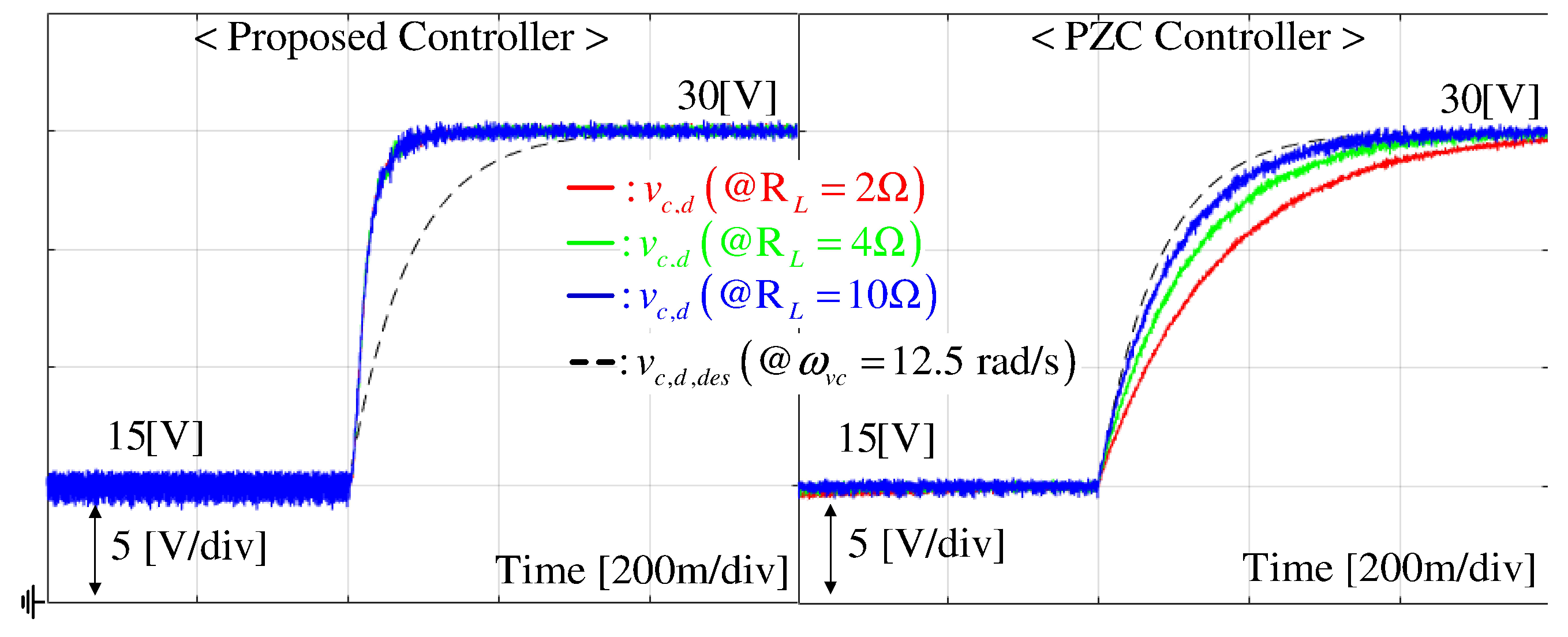
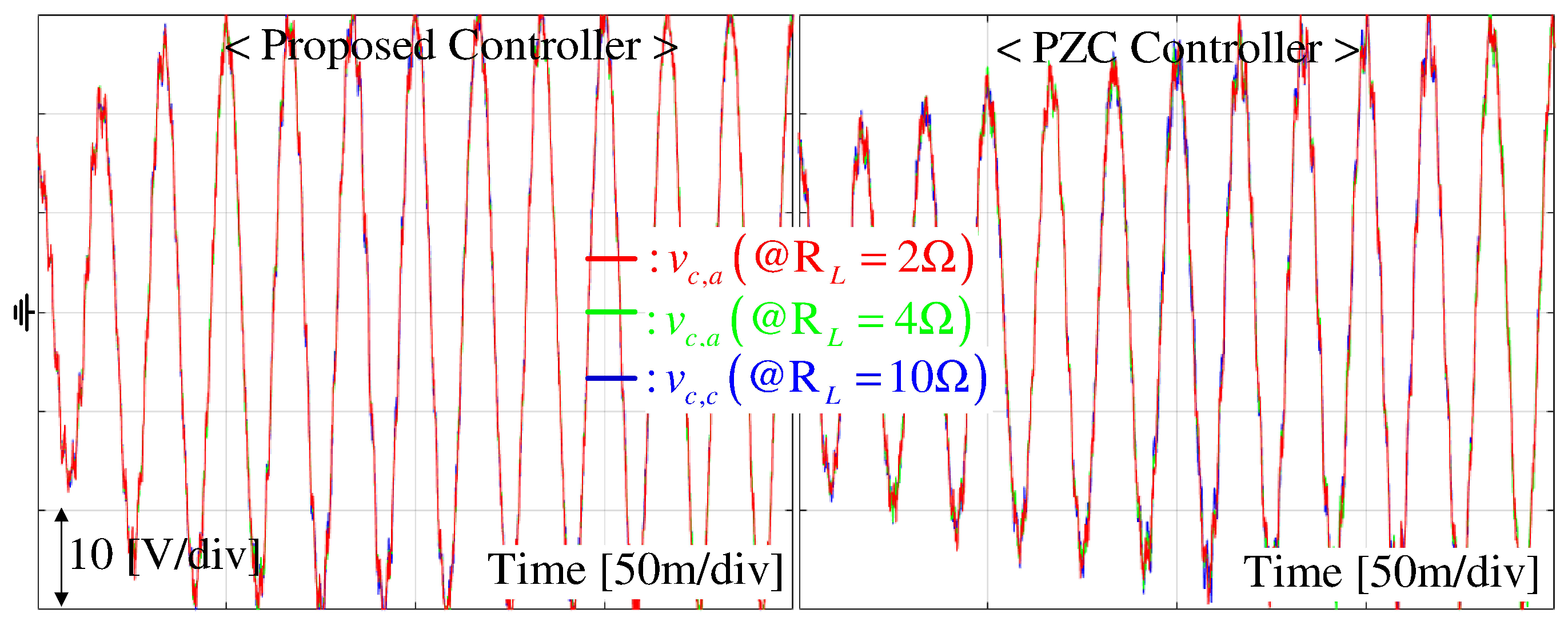
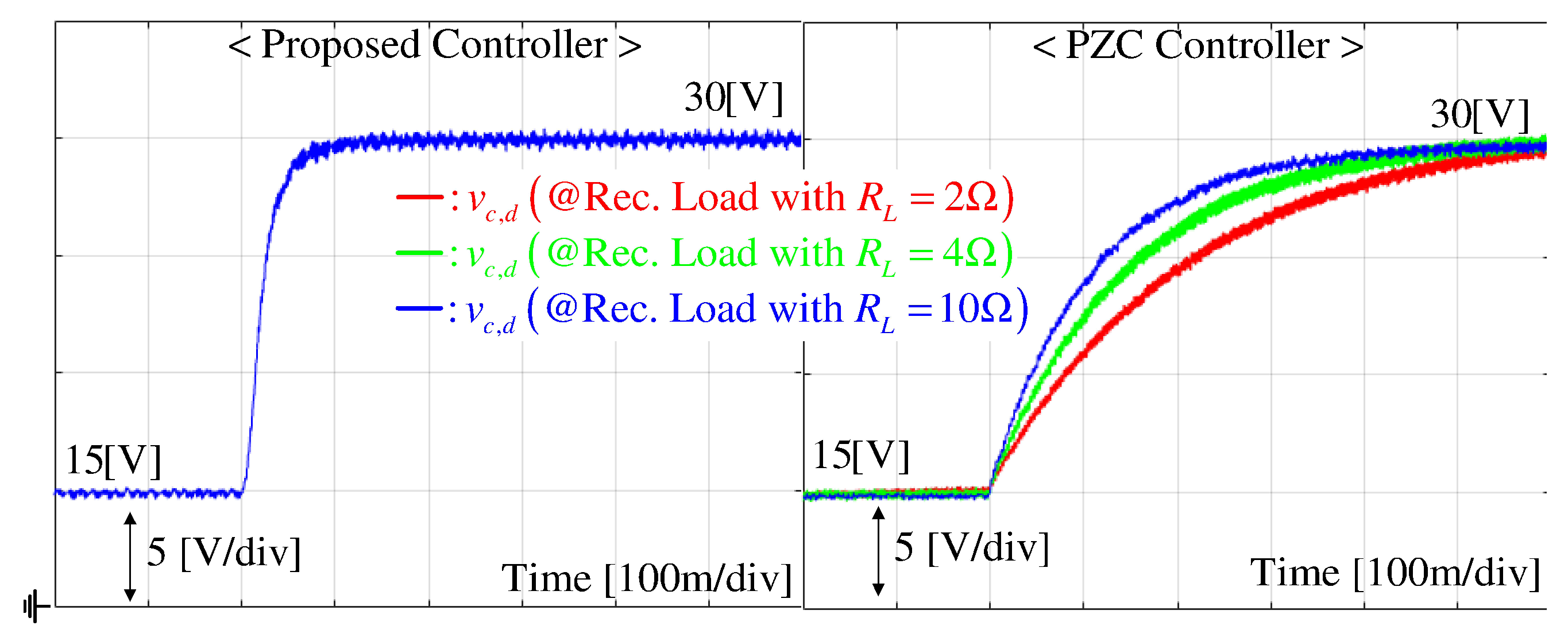
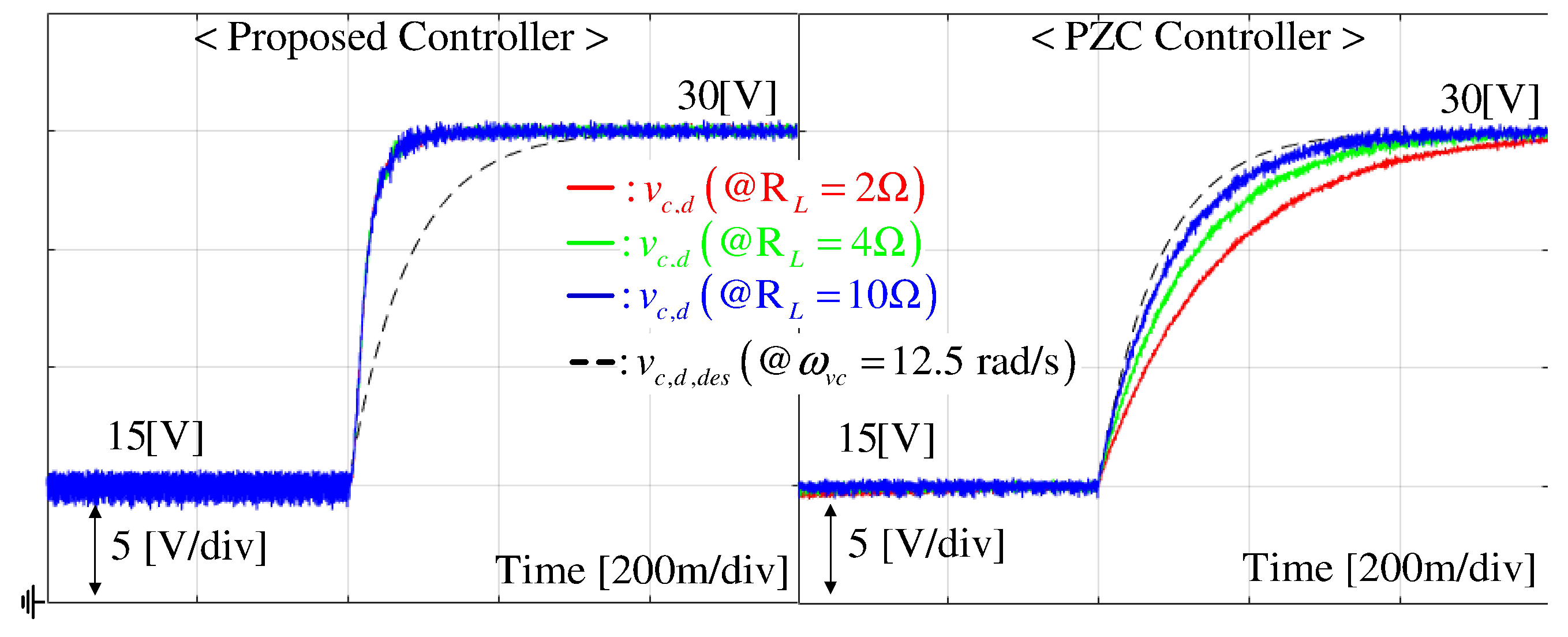
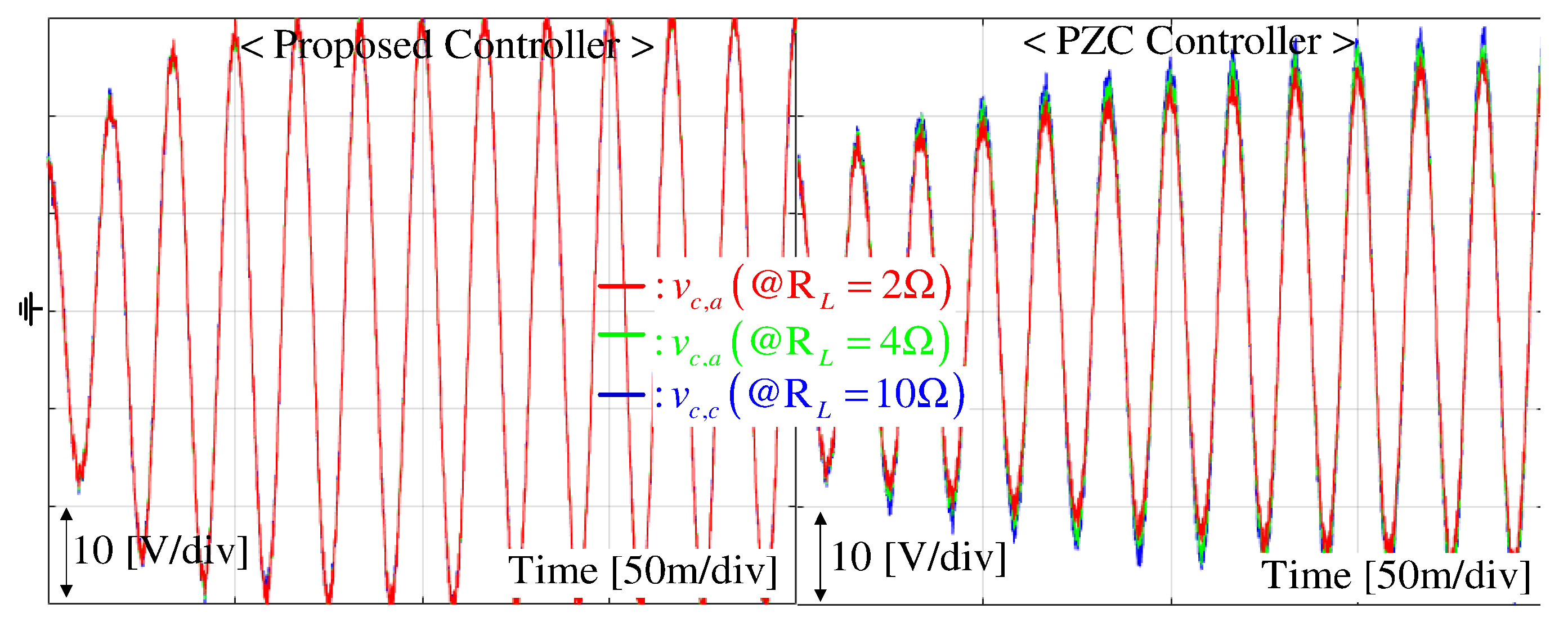
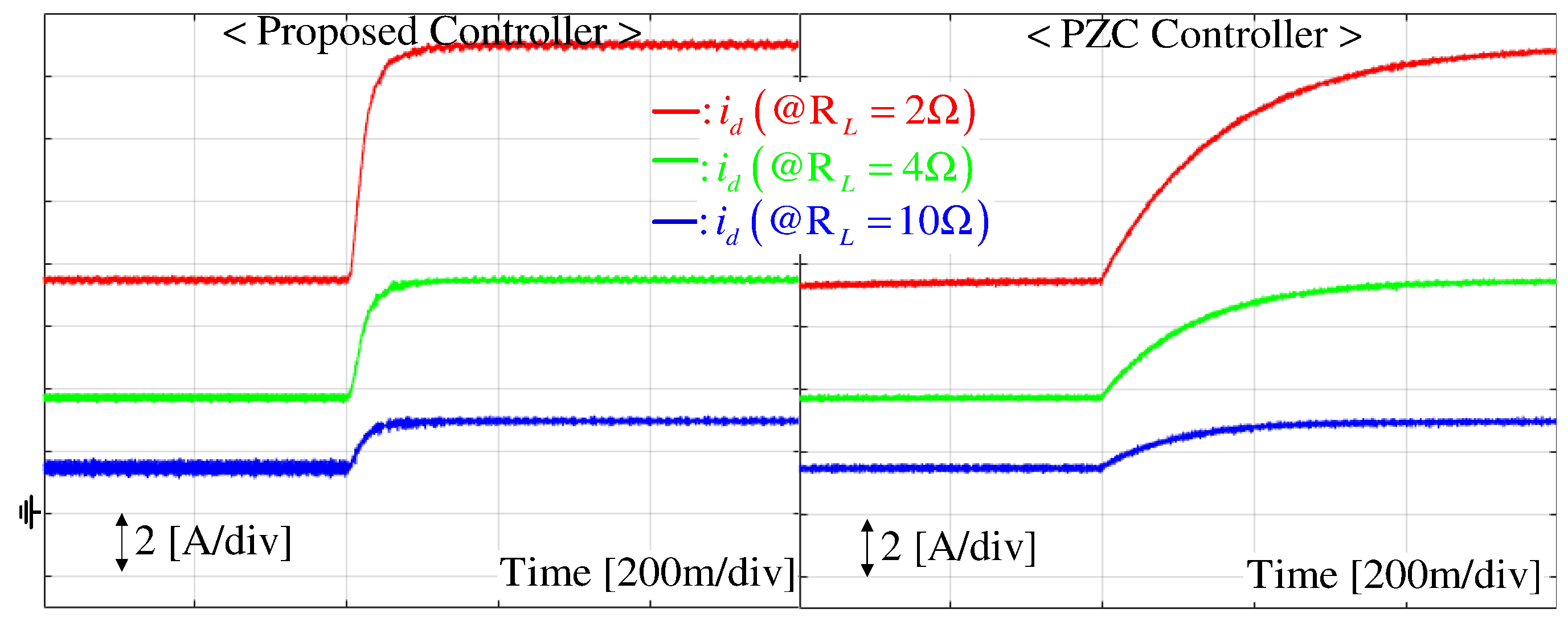
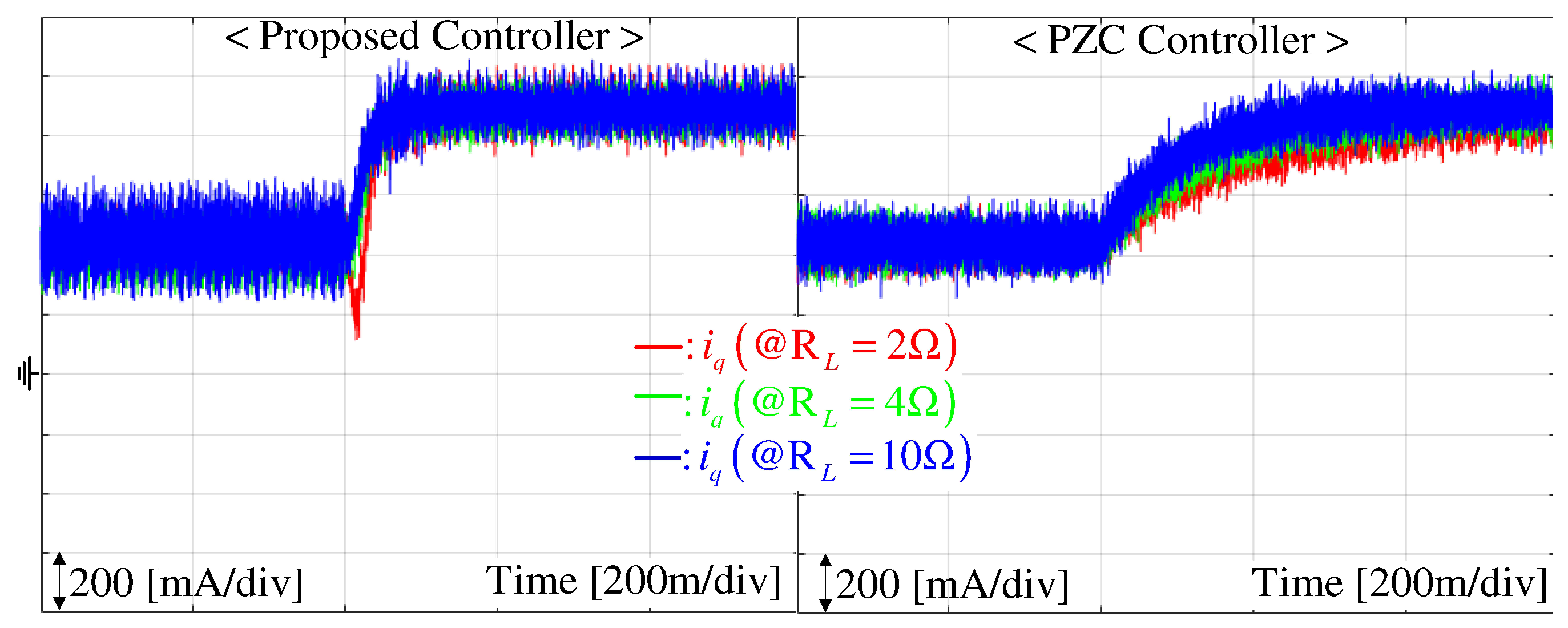
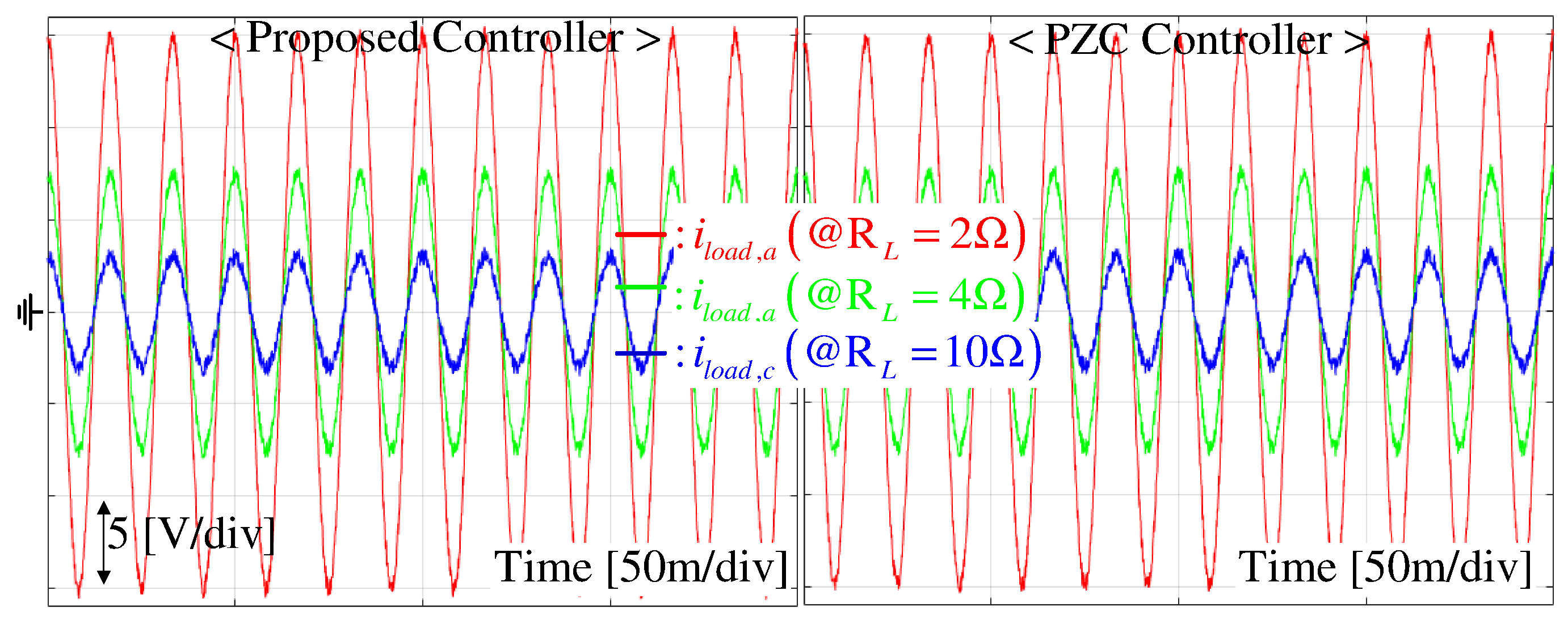
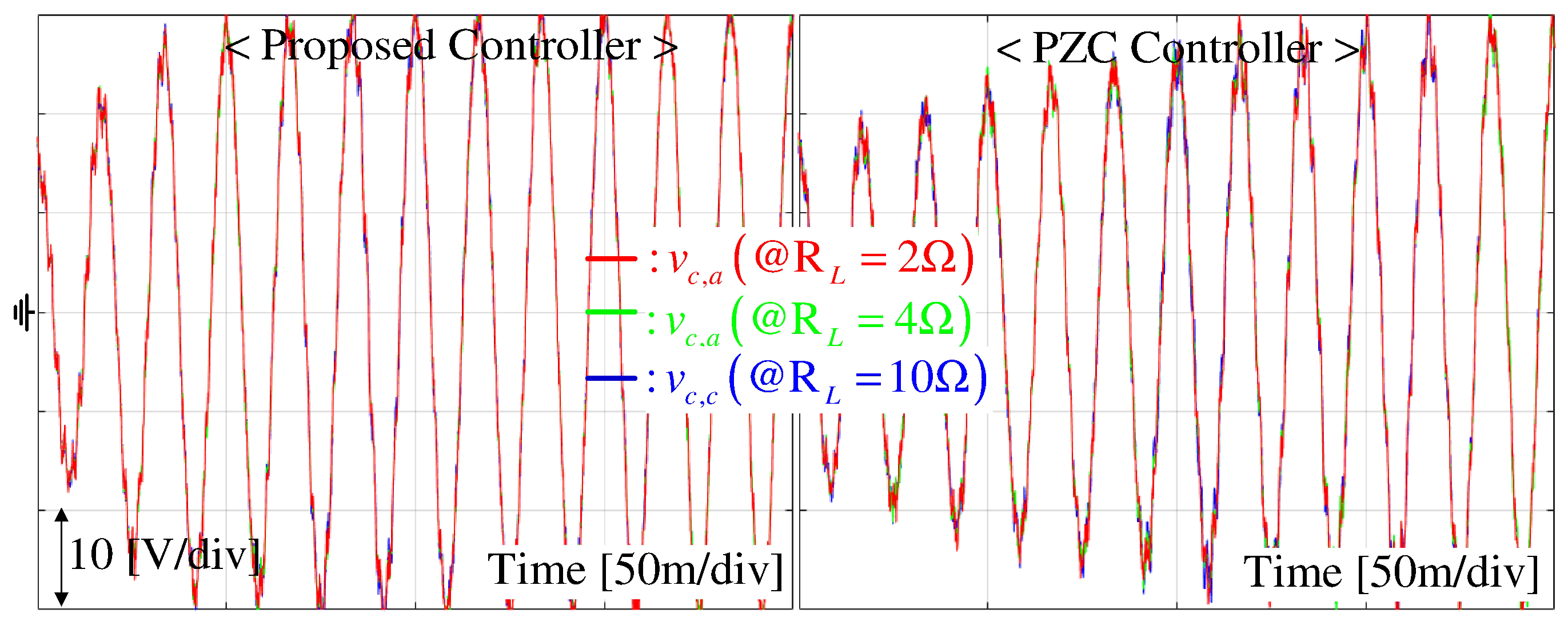
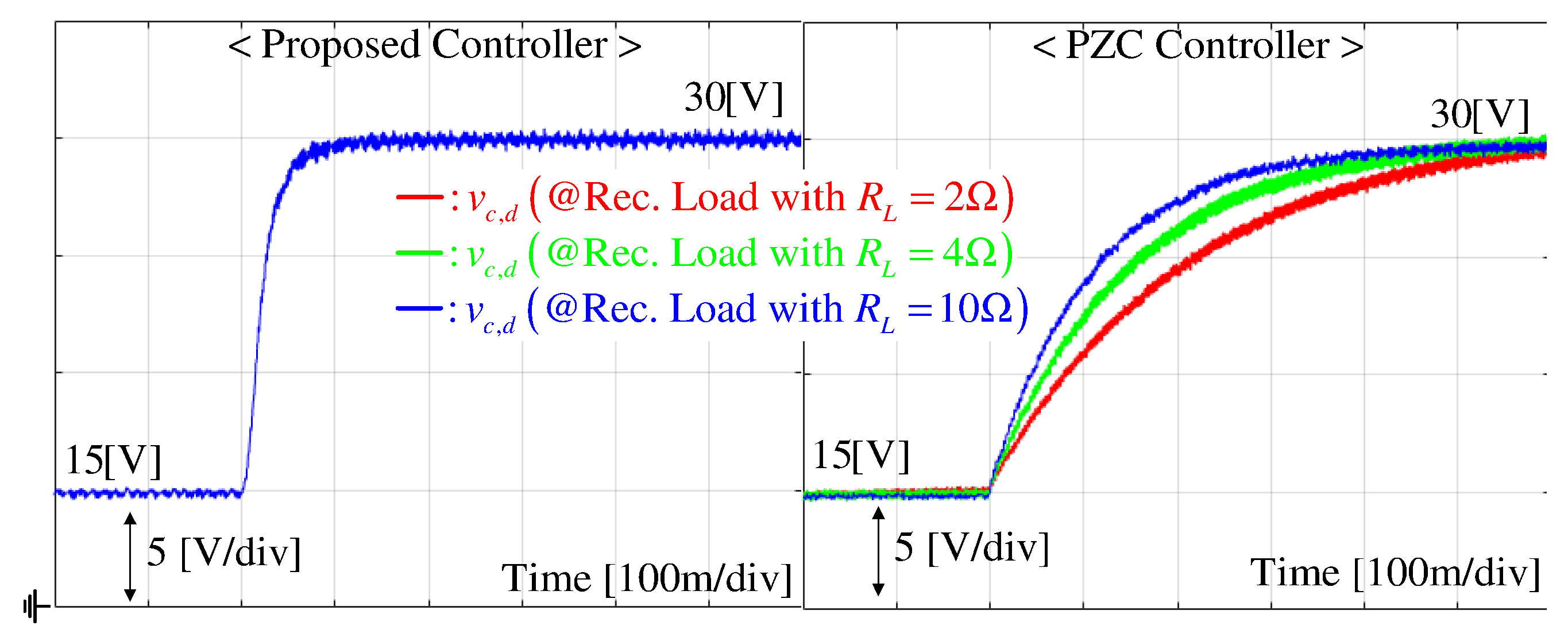
5.1. Performance Comparison for Linear Load Variation
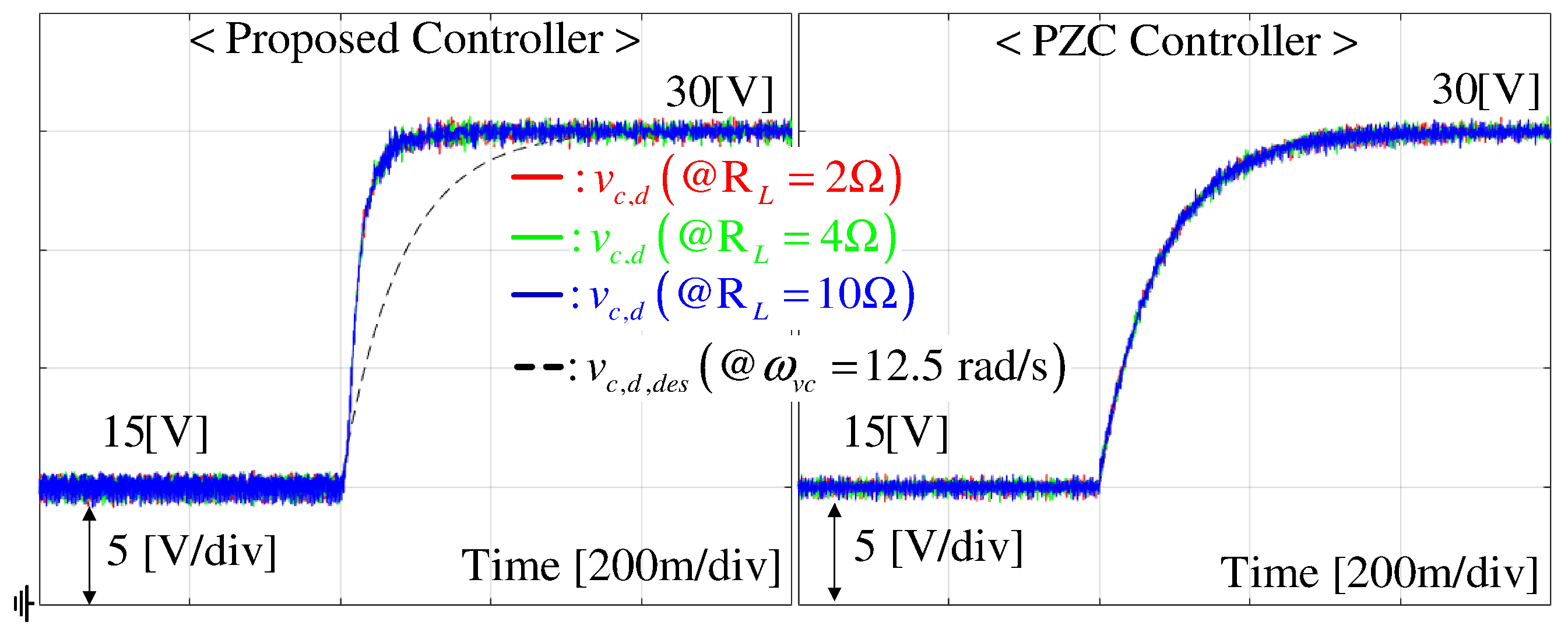
5.1.1. Tracking Task
5.1.2. Tracking Task under Resistive–Inductive Load
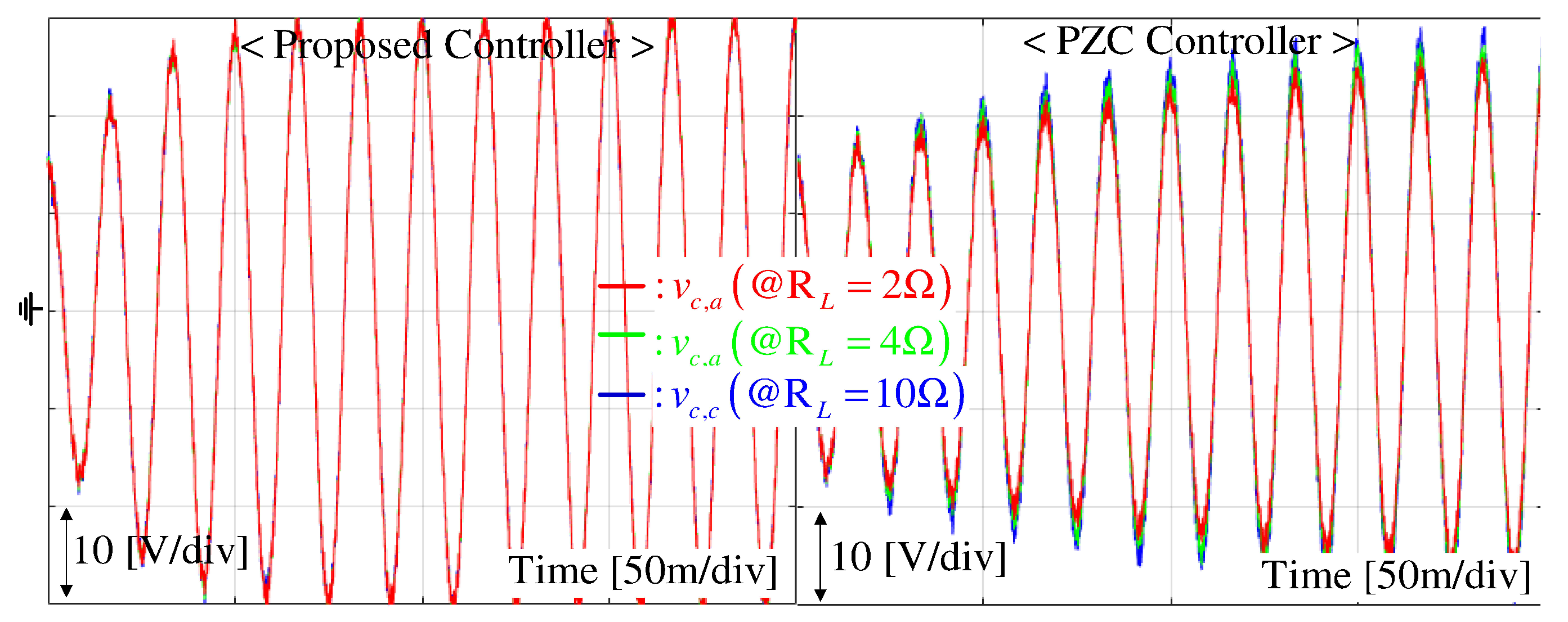
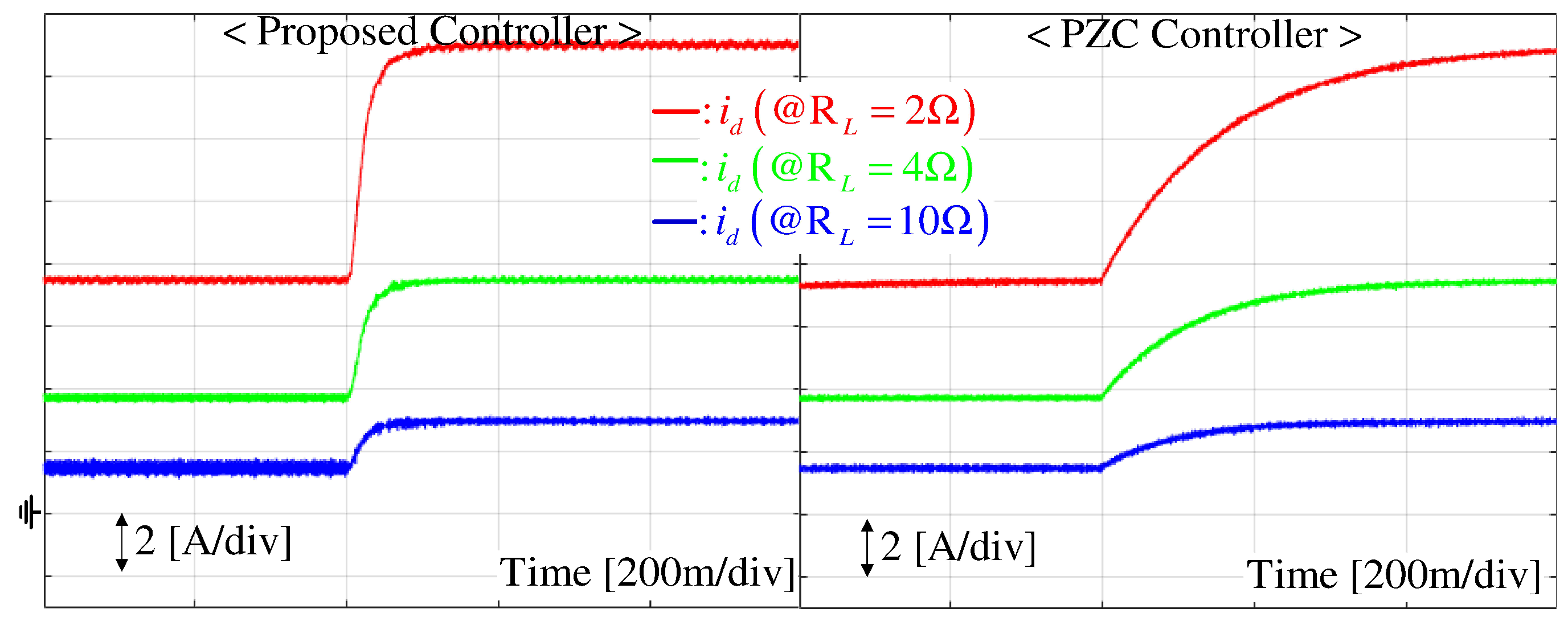
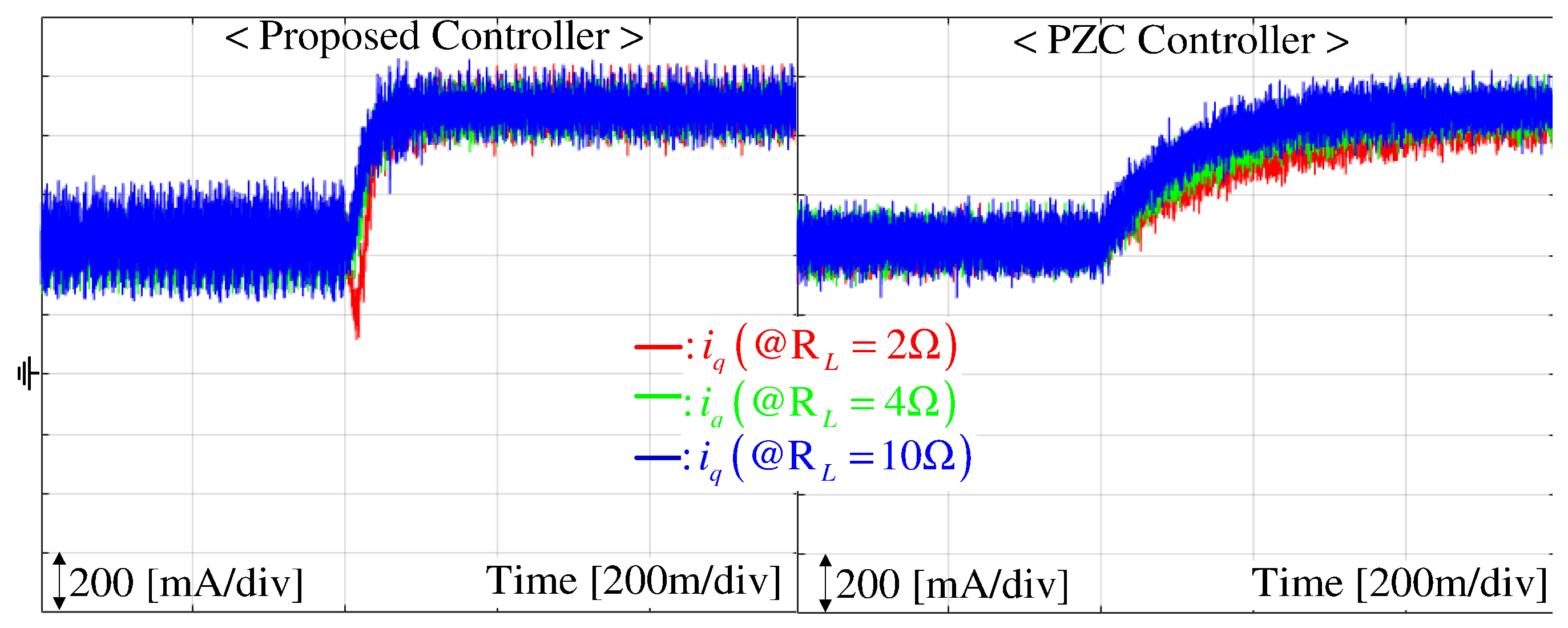
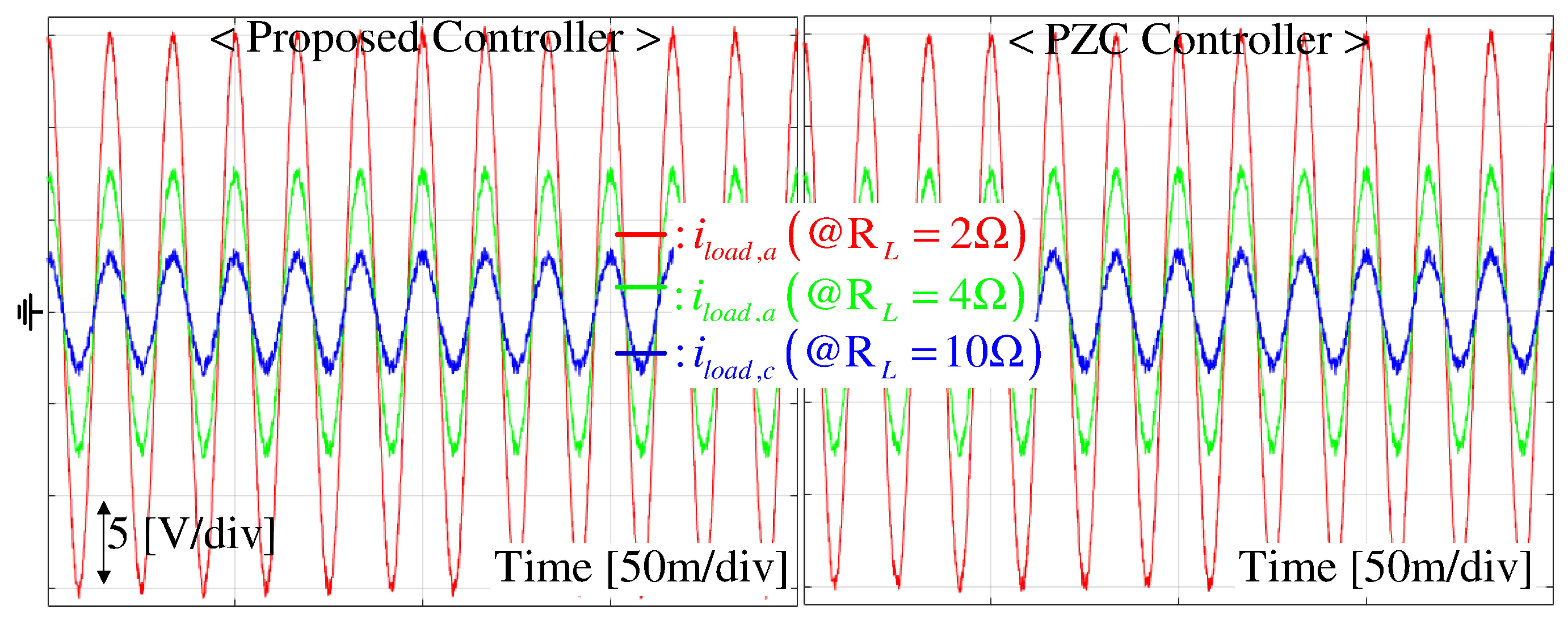
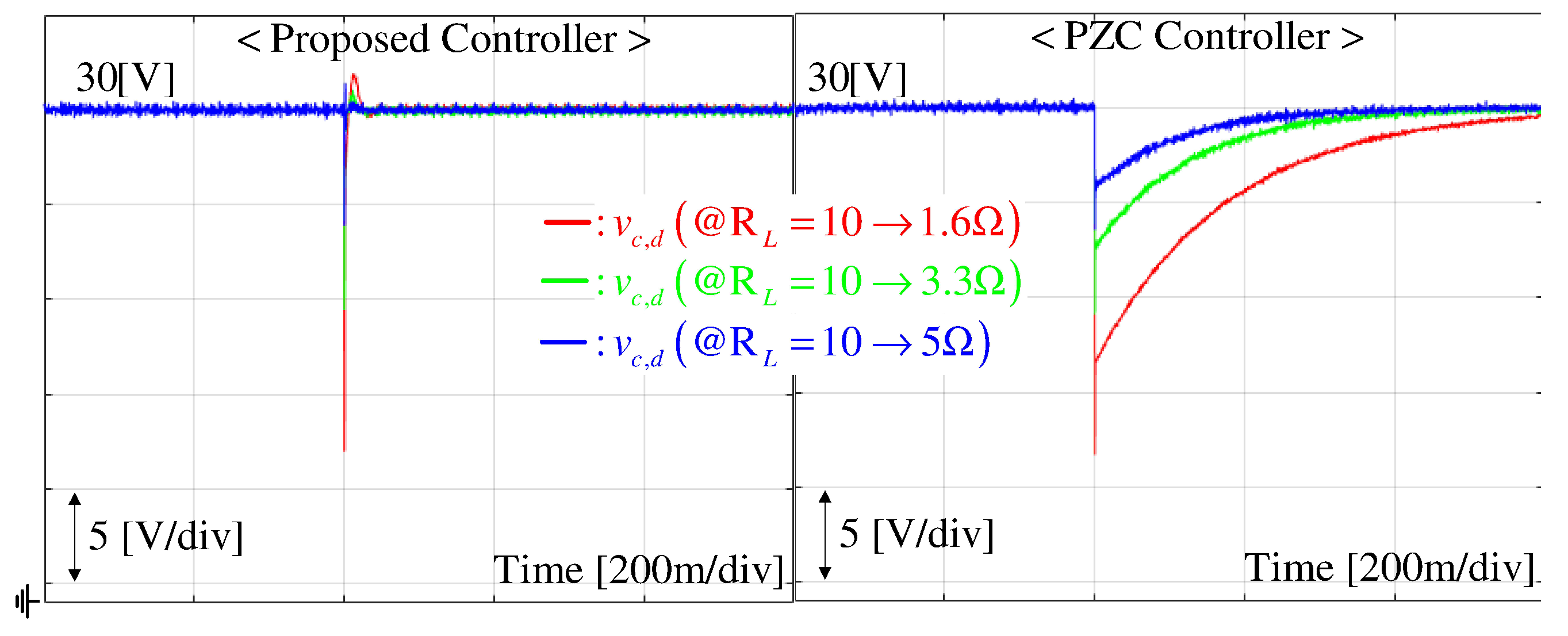
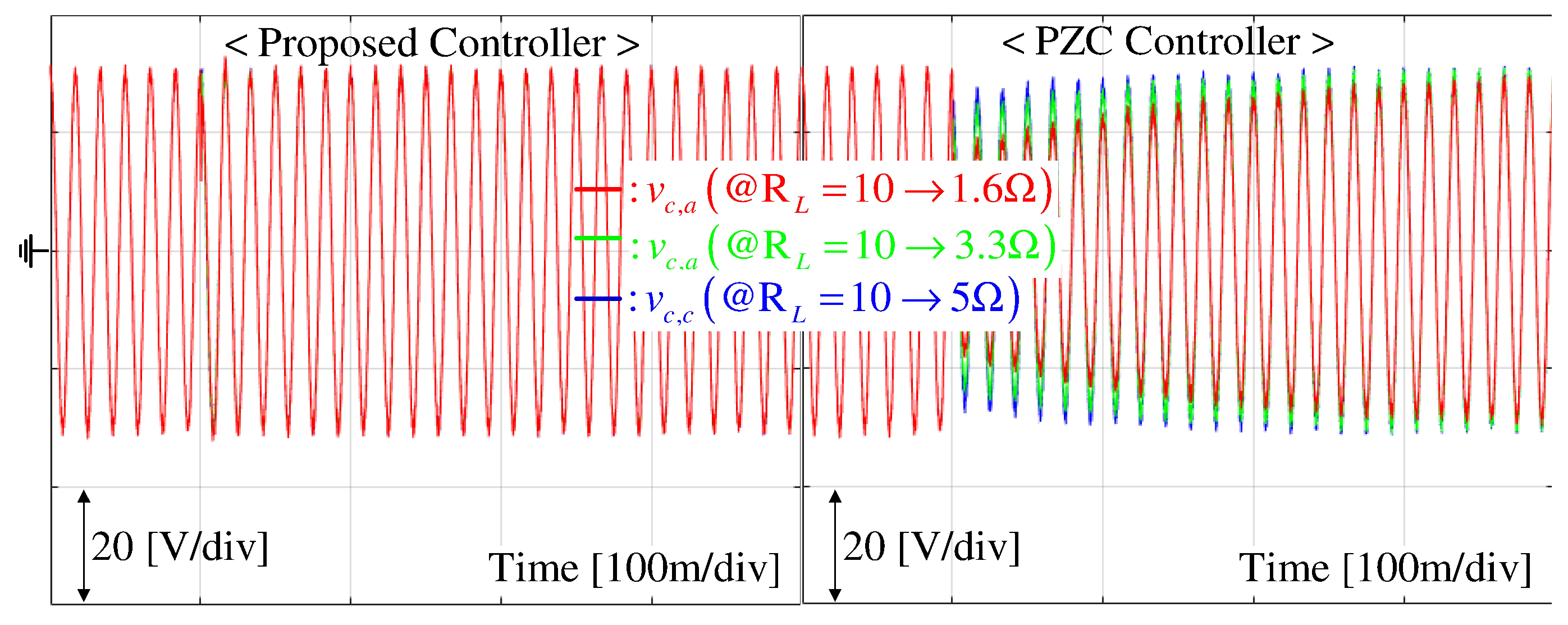
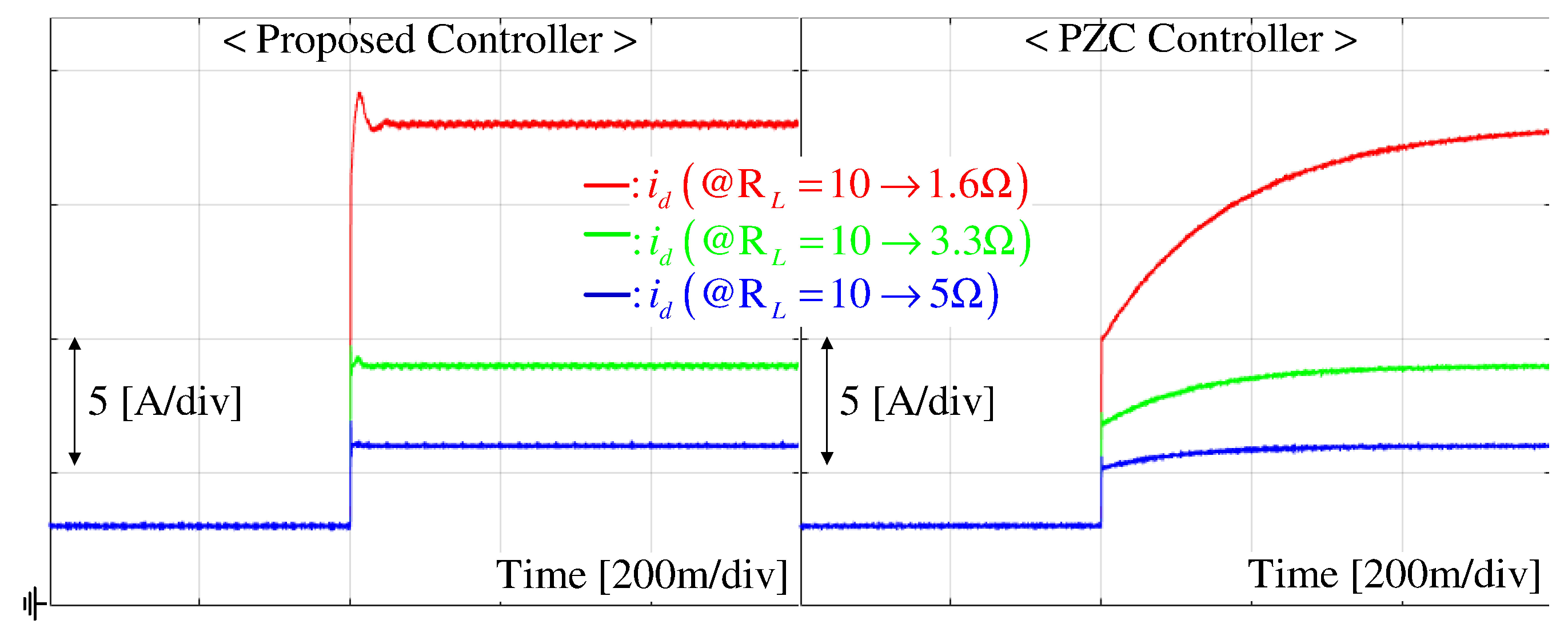
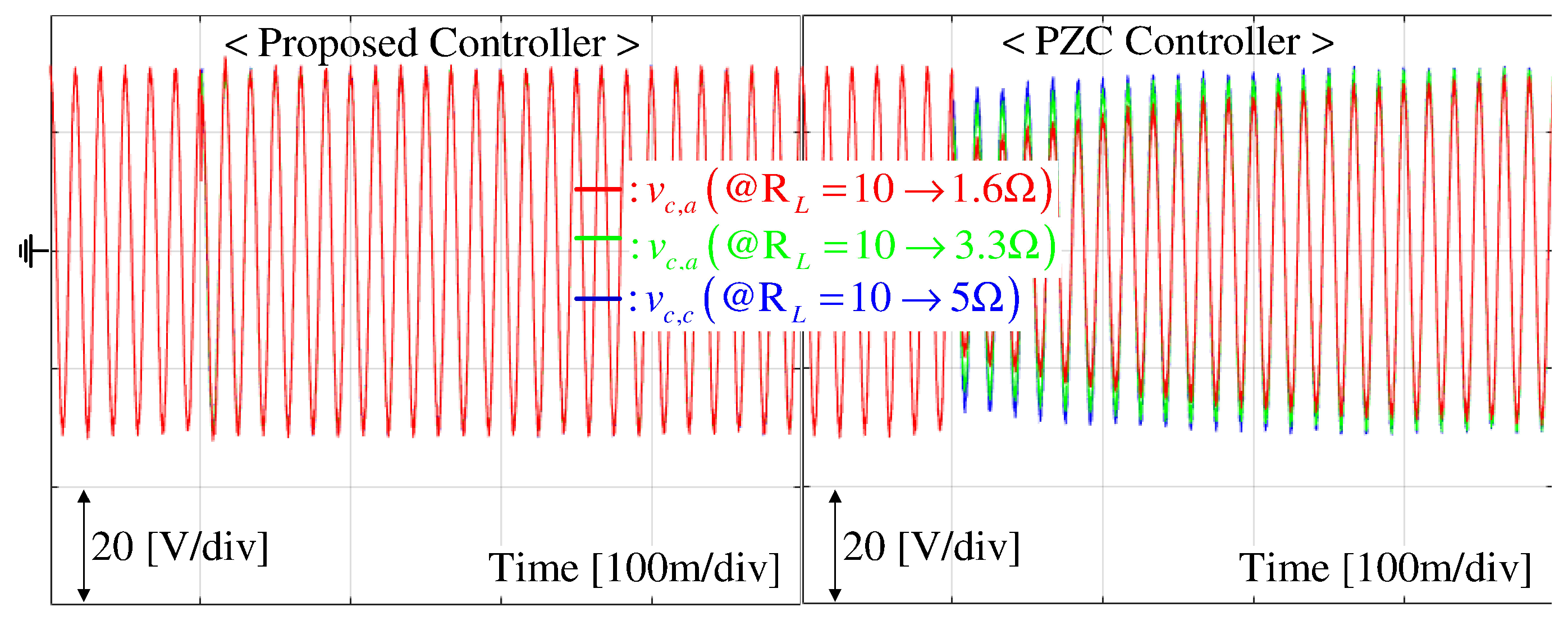
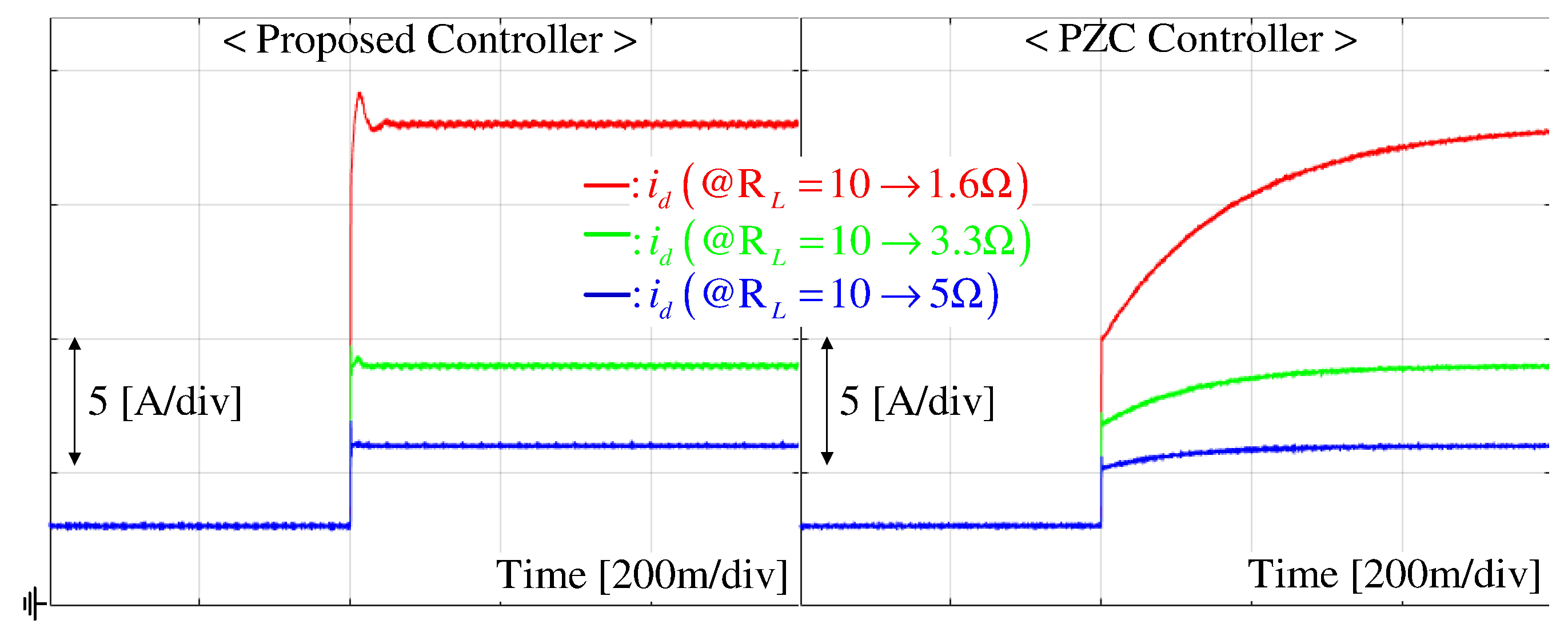
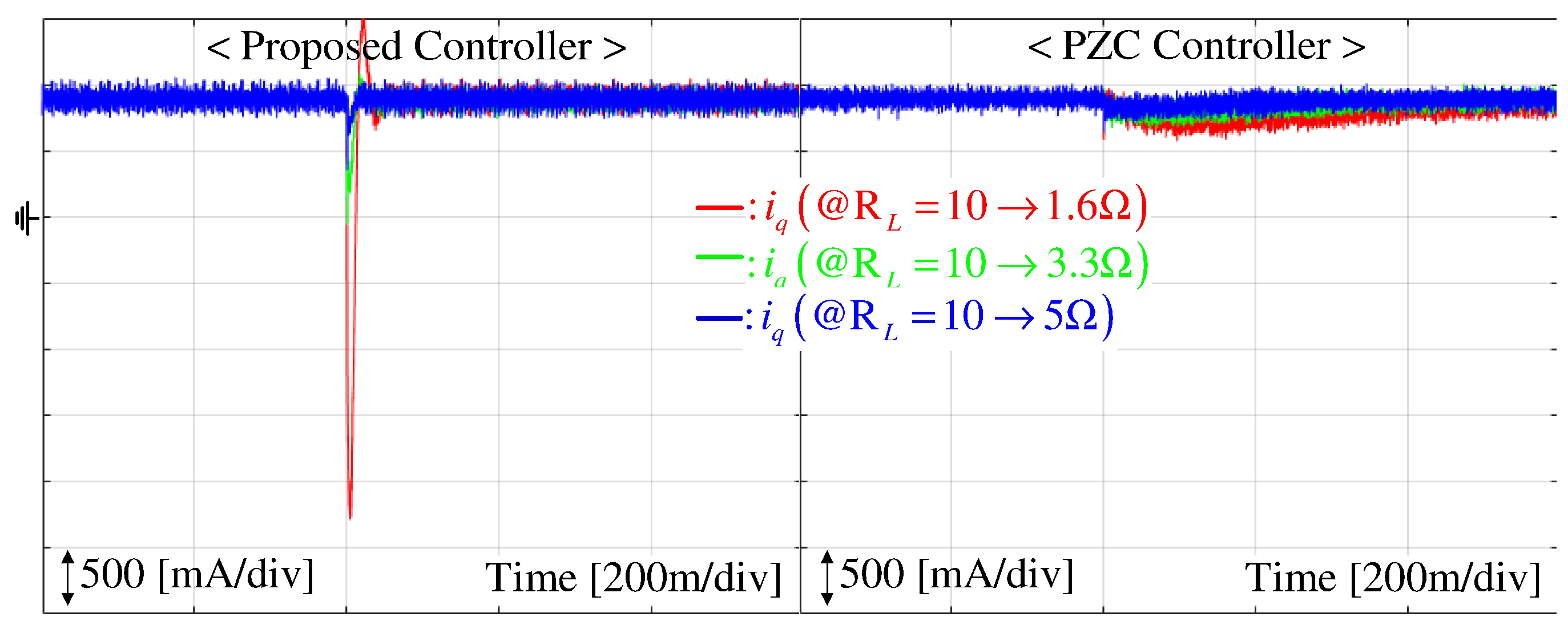
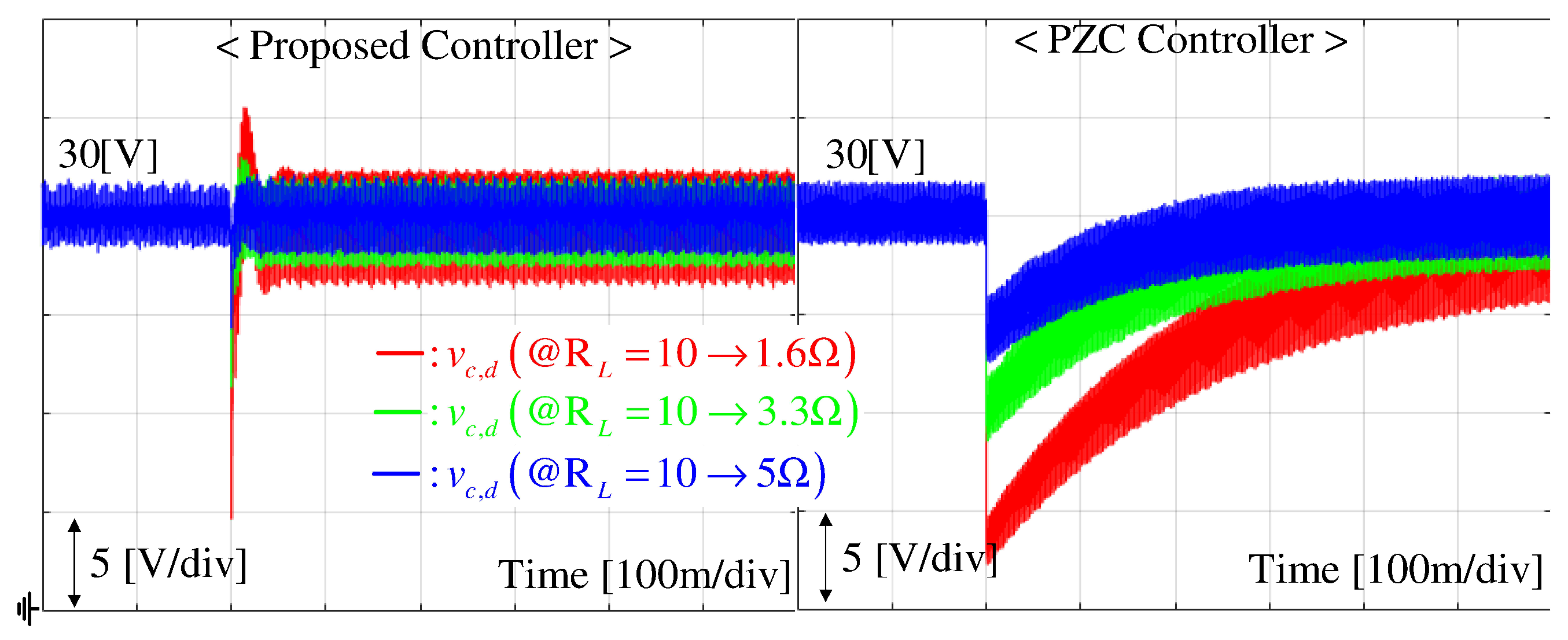
5.1.3. Regulation Task under Resistive Load
5.2. Performance Comparison for Nonlinear Load Variation
5.2.1. Tracking Task
5.2.2. Regulation Task
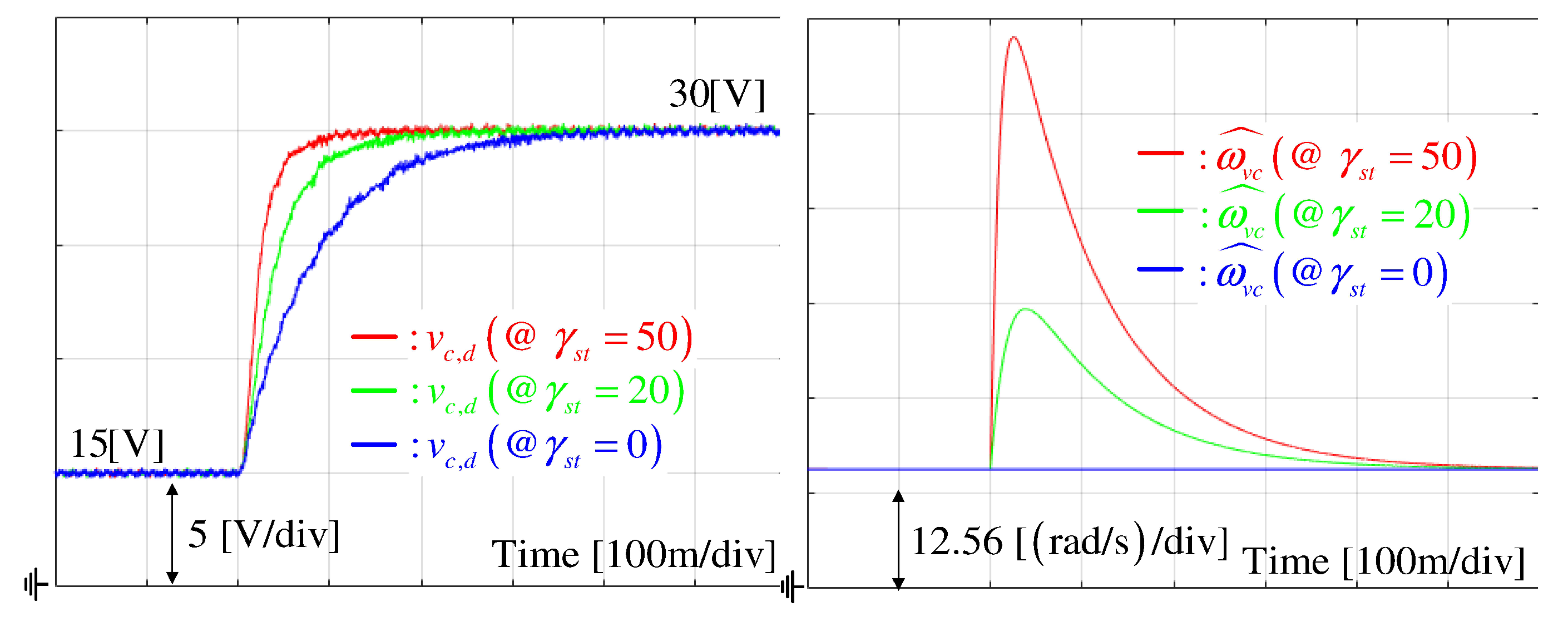
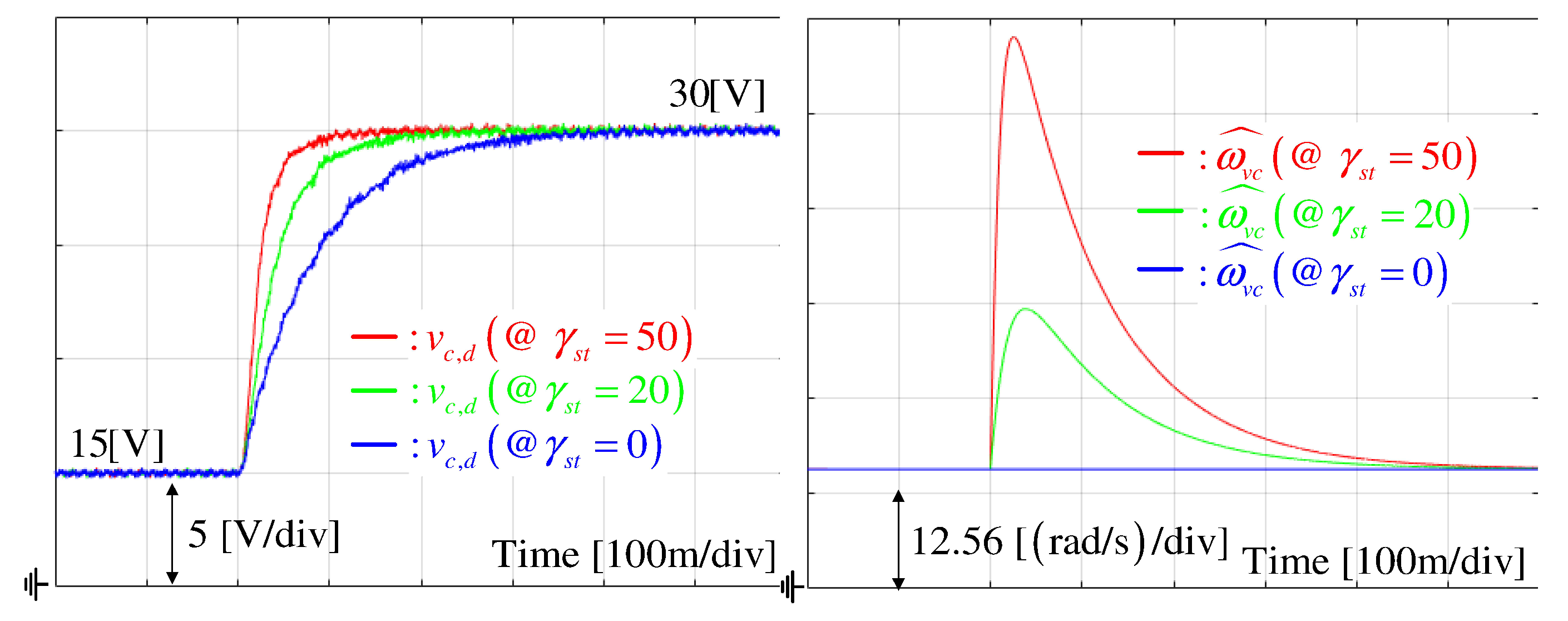
5.3. Tracking Task: Self-Tuner Effect
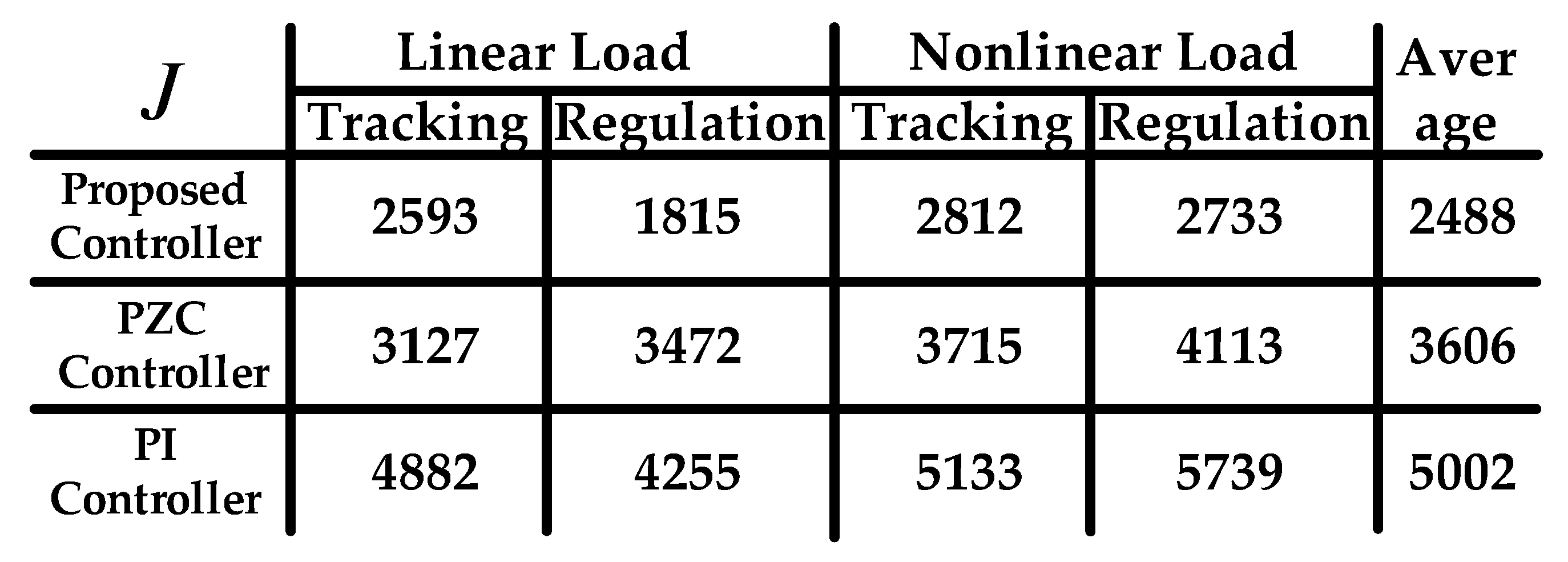
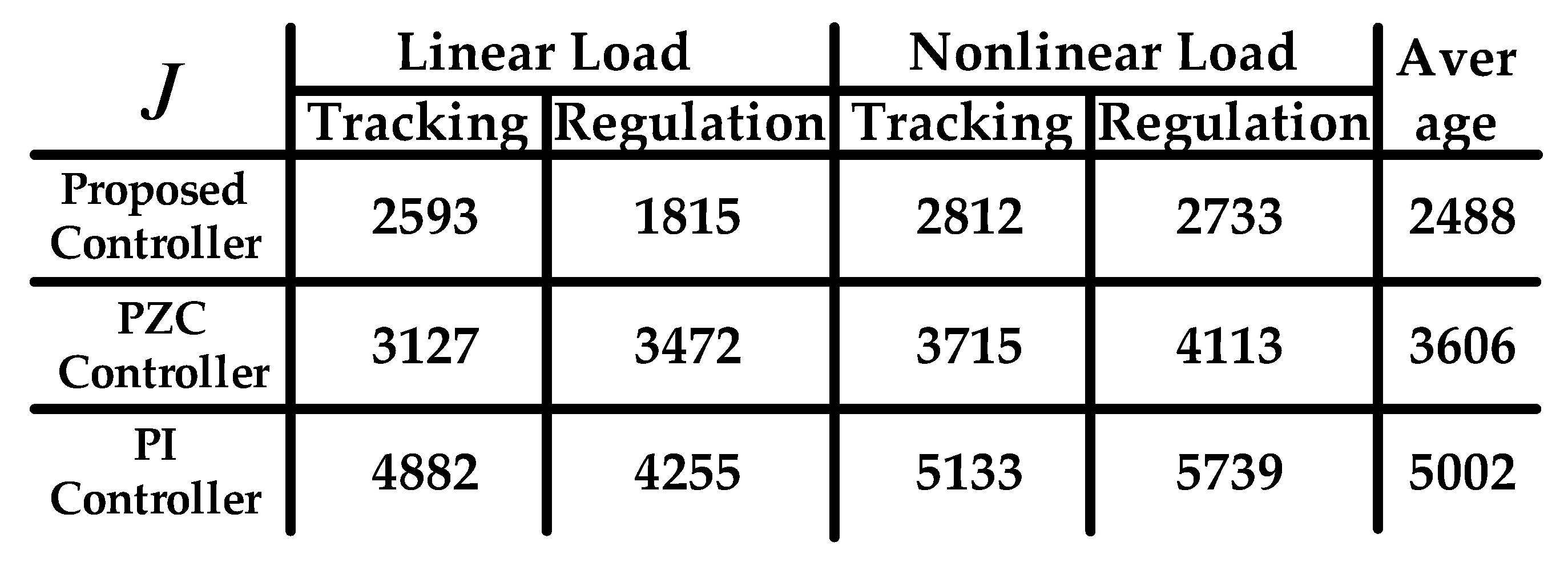
5.4. Summary
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Saeed, M.; Fernández, D.; Guerrero, J.M.; Díaz, I.; Briz, F. Insulation Condition Assessment in Inverter-Fed Motors Using the High-Frequency Common Mode Current: A Case Study. Energies 2024, 17, 470. [Google Scholar] [CrossRef]
- Patel, M.; Zhou, Z. An Interleaved Battery Charger Circuit for a Switched Capacitor Inverter-Based Standalone Single-Phase Photovoltaic Energy Management System. Energies 2023, 16, 7155. [Google Scholar] [CrossRef]
- Luo, Z.; Zhang, B.; Li, L.; Tang, L. A Decentralized Control Strategy for Series-Connected Single-Phase Two-Stage Photovoltaic Grid-Connected Inverters. Energies 2023, 16, 7099. [Google Scholar] [CrossRef]
- Liao, Z.; Peng, T.; Liu, J.; Guo, T. Multi-Adjustment Strategy for Phase Current Reconstruction of Permanent Magnet Synchronous Motors Based on Model Predictive Control. Energies 2023, 16, 5694. [Google Scholar] [CrossRef]
- Kim, S.K. Performance-recovery proportional-type output-voltage tracking algorithm of three-phase inverter for uninterruptible power supply applications. IET Circuits Devices Syst. 2019, 13, 185–192. [Google Scholar] [CrossRef]
- Loh, P.C.; Newman, M.J.; Zmood, D.N.; Holmes, D.G. A comparative analysis of multiloop voltage regulation strategies for single and three-Phase UPS systems. IEEE Trans. Power Electron. 2003, 18, 1176–1185. [Google Scholar]
- Kassakian, J.C.; Schlecht, M.; Verghese, G.C. Principles of Power Electronics; Addison-Wesley: Reading, MA, USA, 1991. [Google Scholar]
- Matausek, M.R.; Jeftenic, B.I.; Miljkovic, D.M.; Bebic, M.Z. Gain scheduling control of DC motor drive with field weakening. IEEE Trans. Ind. Electron. 1996, 43, 153–162. [Google Scholar] [CrossRef]
- Sul, S.K. Control of Electric Machine Drive Systems; Wiley: Hoboken, NJ, USA, 2011; Volume 88. [Google Scholar]
- Kazmierkowski, M.P.; Krishnan, R.; Blaabjerg, F. Control in Power Electronics—Selected Problems; Academic Press: Cambridge, MA, USA, 2002. [Google Scholar]
- Bustos, R.; Gadsden, S.; Biglarbegian, M.; AlShabi, M.; Mahmud, S. Battery State of Health Estimation Using the Sliding Interacting Multiple Model Strategy. Energies 2024, 17, 536. [Google Scholar] [CrossRef]
- Xin, C.; Li, Y.X.; Ahn, C.K. Adaptive Neural Asymptotic Tracking of Uncertain Non-Strict Feedback Systems With Full-State Constraints via Command Filtered Technique. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 8102–8107. [Google Scholar] [CrossRef]
- Liu, D.; Zhao, H. Affine Projection Sign Subband Adaptive Filter Algorithm With Unbiased Estimation Under System Identification. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 1209–1213. [Google Scholar] [CrossRef]
- Kawabata, T.; Miyashita, T.; Yamamoto, Y. Deadbeat control of three phase PWM inverter. IEEE Trans. Power Electron. 1990, 5, 21–28. [Google Scholar] [CrossRef]
- Ito, Y.; Kawauchi, S. Microprocessor-based robust digital control for UPS with three-phase PWM inverter. IEEE Trans. Power Electron. 1995, 10, 196–204. [Google Scholar] [CrossRef]
- Cho, J.S.; Lee, S.Y.; Mok, H.S.; Choe, G.H. Modified deadbeat digital controller for UPS with 3-phase PWM inverter. In Proceedings of the Industry Applications Conference, Thirty-Fourth IAS Annual Meeting, Phoenix, AZ, USA, 3–7 October 1999. [Google Scholar]
- Willmann, G.; Coutinho, D.F.; Pereira, L.F.A.; Libano, F.B. Multiple-loop H∞ control design for uninterruptible power supplies. IEEE Trans. Ind. Electron. 2007, 54, 1591–1602. [Google Scholar] [CrossRef]
- Lee, T.; Tzeng, K.; Chong, M. Robust controller design for a single-phase UPS inverter using μ-synthesis. IEE Proc. Electr. Power Appl. 2004, 151, 334–340. [Google Scholar] [CrossRef]
- Pichan, M.; Rastegar, H. Sliding-Mode Control of Four-Leg Inverter With Fixed Switching Frequency for Uninterruptible Power Supply Applications. IEEE Trans. Ind. Electron. 2017, 64, 6805–6814. [Google Scholar] [CrossRef]
- Vargas, R.; Cortes, P.; Ammann, U.; Rodriguez, J.; Pontt, J. Predictive control of a three-phase neutral-point-clamped inverter. IEEE Trans. Ind. Electron. 2007, 54, 2697–2705. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Vazquez, S.; Franquelo, L.G. Predictive control of a three-phase UPS inverter using two steps prediction horizon. In Proceedings of the 2010 IEEE International Conference on Industrial Technology (ICIT), Via del Mar, Chile, 14–17 March 2010. [Google Scholar]
- Cortes, P.; Ortiz, G.; Yuz, J.I.; Rodriguez, J.; Vazquez, S.; Franquelo, L.G. Model Predictive Control of an Inverter With Output LC Filter for UPS Applications. IEEE Trans. Ind. Electron. 2009, 56, 1875–1883. [Google Scholar] [CrossRef]
- Bemporad, A.; Borrelli, F.; Morari, M. Model predictive control based on linear programming; The explicit solution. IEEE Trans. Autom. Control 2002, 47, 1974–1985. [Google Scholar] [CrossRef]
- Borrelli, F. Constrained Optimal Control of Linear and Hybrid Systems; Springer: New York, NY, USA, 2003. [Google Scholar]
- Kim, S.K.; Park, C.; Yoon, T.W.; Lee, Y. Disturbance-observer-based model predictive control for output voltage regulation of three-phase inverter for uninterruptible-powersupply applications. Eur. J. Control 2015, 23, 71–83. [Google Scholar] [CrossRef]
- Lim, J.; Park, C.; Han, J.; Lee, Y. Robust tracking control of a three-phase DC-AC inverter for UPS applications. IEEE Trans. Ind. Electron. 2014, 61, 4142–4151. [Google Scholar] [CrossRef]
- Danayiyen, Y.; Lee, K.; Choi, M.; Lee, Y. Model Predictive Control of Uninterruptible Power Supply with Robust Disturbance Observer. Energies 2019, 12, 2871. [Google Scholar] [CrossRef]
- Nam, N.; Choi, M.; Lee, Y. Model Predictive Control of a Grid-Connected Inverter with LCL Filter using Robust Disturbance Observer. In Proceedings of the IFAC Workshop on Control of Smart Grid and Renewable Energy Systems CSGRES 2019, Jeju, Republic of Korea, 10–12 June 2019. [Google Scholar]
- Danayiyen, Y.; Altaş, I.; Lee, Y. Robust Discrete Time Disturbance Observer with Finite Control Set Model Predictive Control in UPS System. In Proceedings of the IFAC Workshop on Control of Smart Grid and Renewable Energy Systems CSGRES 2019, Jeju, Republic of Korea, 10–12 June 2019. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Hoboken, NJ, USA, 2002. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.; Kim, Y.; Kim, S.-K. Current Sensorless Pole-Zero Cancellation Output Voltage Control for Uninterruptible Power Supply Systems with a Three-Phase Inverter. Energies 2024, 17, 1738. https://doi.org/10.3390/en17071738
Lee H, Kim Y, Kim S-K. Current Sensorless Pole-Zero Cancellation Output Voltage Control for Uninterruptible Power Supply Systems with a Three-Phase Inverter. Energies. 2024; 17(7):1738. https://doi.org/10.3390/en17071738
Chicago/Turabian StyleLee, Hosik, Yonghun Kim, and Seok-Kyoon Kim. 2024. "Current Sensorless Pole-Zero Cancellation Output Voltage Control for Uninterruptible Power Supply Systems with a Three-Phase Inverter" Energies 17, no. 7: 1738. https://doi.org/10.3390/en17071738