
Adaptive Gain-Based Double-Loop Full-Order Terminal Sliding Mode Control of a Surface-Mounted PMSM System


Abstract
1. Introduction
- The d- and q-axis currents cannot track their high-frequency switching references generated by traditional SMC methods.
- Disturbance-rejection performance for both the matched and mismatched uncertainties in SPMSM systems is simultaneously improved when designing the speed and current controllers.
- The distinctive integral-type control law guarantees continuous control input, which is indicative of rapid and precise system response. This control strategy introduces a distinctive approach to resolving the chattering phenomenon observed in both virtual and real control signals, thereby mitigating the ripple effect in speed and current dynamics.
- The adaptive switching gain is designed to prevent the overcontrol deficiency caused by the algebraic loop issue and to save energy in the dynamic procedure of the SPMSM control system.
2. The Model of SPMSM with Uncertainties
3. Controller Design Based on the FOTSM
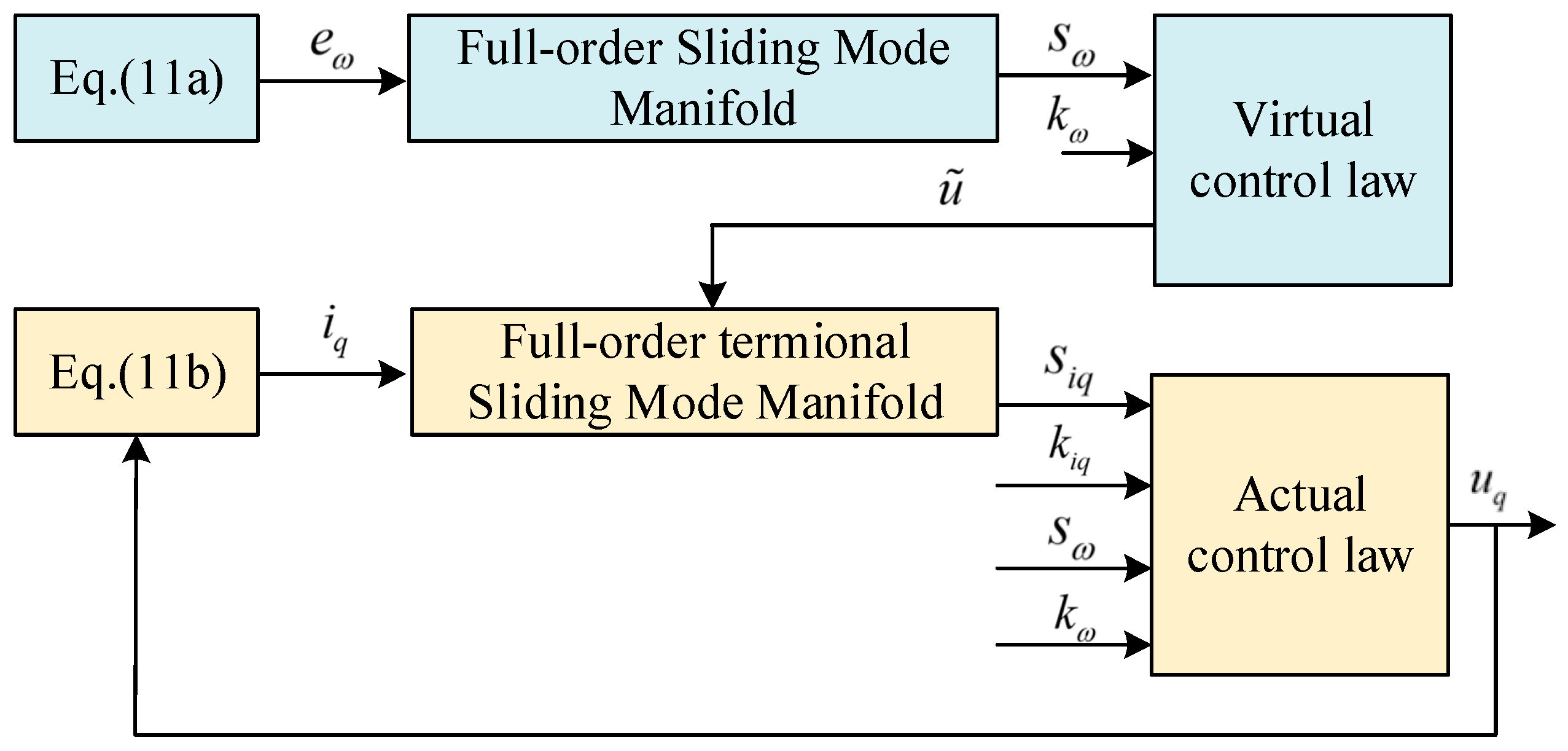
- The speed controller is designed to make the speed track its reference, i.e., dω can be forced to approach zero rapidly by the VCL ũ. The virtual control technique is synthesized into the design of the speed controller, and the VCL ũ is utilized to cope with the mismatched uncertainties dω;
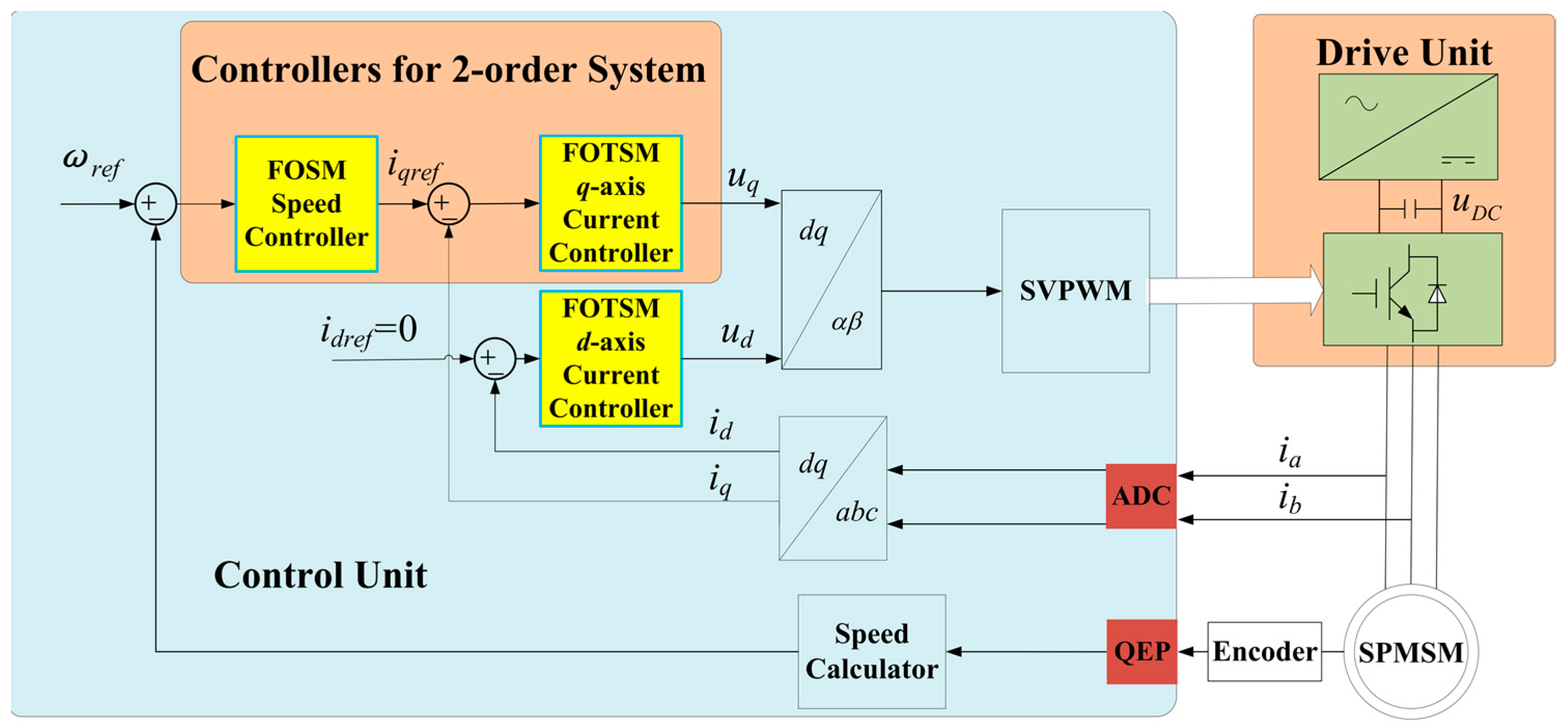
- In the current loops, the control strategy of iref = 0 is adopted to realize the decoupled control for the FOC system based on the SPMSM. The d- and q-axis current controllers are designed to make the d- and q-axis currents id,q track their references accurately and rapidly. The current errors eid,iq can be forced to converge to zero in finite time by the actual control laws ud,q, which are used to compensate the matched uncertainties did,iq.
4. Experiments
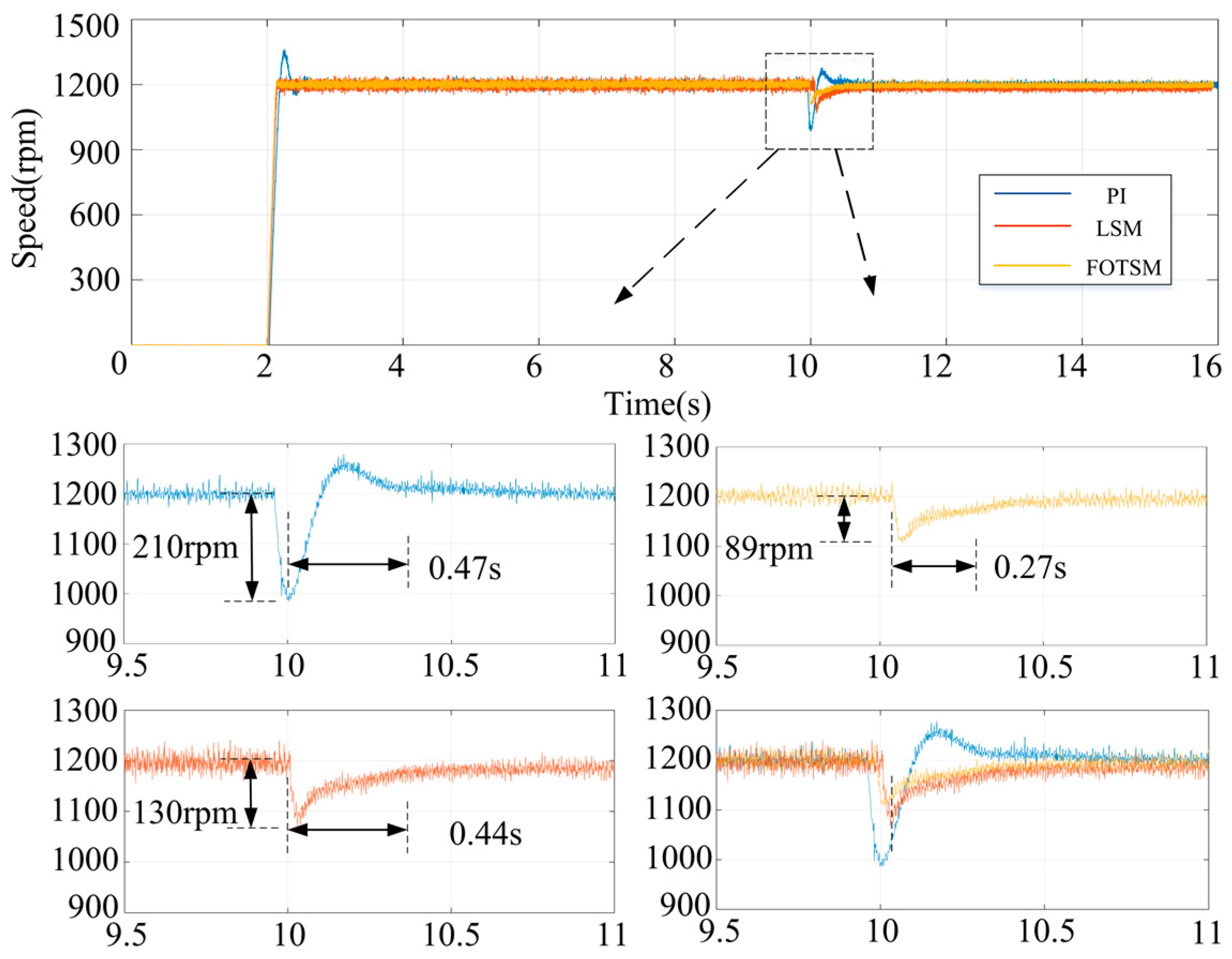
4.1. Response to Small Load Addition
4.2. Response to Large Load Addition
4.3. Speed-Reverse Response
4.4. High-Speed Response
5. Conclusions
- The matched and mismatched uncertainties in SPMSM systems are incorporated into the control algorithm design, and the virtual control signal is specially engineered to effectively counteract these uncertainties, ensuring robust control performance under diverse operating conditions.
- The innovatively designed integral-type law addresses the chattering prompted by high-frequency switching terms, thus deriving smooth current-reference and voltage signals, which are essential for precise system control.
- The adaptive law for the switching gain is proven highly effective in suppressing the over-control caused by the algebraic loop issue, thus leading to energy savings in the convergence procedure of the SPMSM control system.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SPMSM | surface-mounted permanent magnet synchronous motor |
| VCL | virtual control law |
| PI | proportional-integral |
| SMC | sliding mode control |
| FOC | field orientation control |
| ISMC | I integral sliding mode control |
| DOBSMC | disturbance observer-based sliding mode control |
| SVPWM | space vector pulse width modulation |
| FOTSM | full-order terminal sliding mode |
| SISO | single-input single-output |
| LSM | linear sliding mode |
| IPMSM | inserted permanent magnet synchronous motor |
| SMRL | sliding mode reaching law |
References
- Huang, Y.; Liu, S.; Pang, R.; Liu, X.; Rao, X. Model Predictive Current Control for Six-Phase PMSM with Steady-State Performance Improvement. Energies 2024, 17, 5273. [Google Scholar] [CrossRef]
- Ji, X.; He, X.; Lv, C.; Liu, Y.; Wu, J. Adaptive-neural-network-based robust lateral motion control for autonomous vehicle at driving limits. Control Eng. Pract. 2018, 76, 41–53. [Google Scholar] [CrossRef]
- Seok, J.; Lee, J.K.; Lee, D. Sensorless speed control of nonsalient permanent-magnet synchronous motor using rotor-position-tracking PI controller. IEEE Trans. Ind. Electron. 2006, 53, 399–405. [Google Scholar] [CrossRef]
- Peng, H.; Li, J.; Andreas, T.; Deng, K.; Cem, U.; Lars, L.; Kay, H. A scalable, causal, adaptive rule-based energy management for fuel cell hybrid railway vehicles learned from results of dynamic programming. eTransportation 2020, 4, 100057. [Google Scholar] [CrossRef]
- Li, L.; Pei, G.; Liu, J.; Du, P.; Pei, L.; Zhong, C. 2-DOF robust H∞ control for permanent magnet synchronous motor with disturbance observer. IEEE Trans. Power Electron. 2021, 36, 3462–3472. [Google Scholar] [CrossRef]
- Tan, B.; Li, H.; Zhao, D.; Liang, Z.; Ma, R.; Huangfu, Y. Finite-control-set model predictive control of interleaved DC-DC boost converter Based on Kalman observer. eTransportation 2022, 11, 100158. [Google Scholar] [CrossRef]
- Qu, L.; Qiao, W.; Qu, L. An extended-state-observer-based sliding-mode speed control for permanent-magnet synchronous motors. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 1605–1613. [Google Scholar] [CrossRef]
- Dai, C.; Guo, T.; Yang, J.; Li, S. A disturbance observer-based current constrained controller for speed regulation of PMSM systems subject to unmatched disturbances. IEEE Trans. Ind. Electron. 2021, 68, 767–775. [Google Scholar] [CrossRef]
- Kong, D.; Cai, H.; Zeng, W. Fast Terminal Sliding-Mode Predictive Speed Controller for Permanent-Magnet Synchronous Motor Drive Systems. Energies 2024, 17, 3767. [Google Scholar] [CrossRef]
- Pashaei, S.; Badamchizadeh, M. A new fractional-order sliding mode controller via a nonlinear disturbance observer for a class of dynamical systems with mismatched disturbances. ISA Trans. 2016, 63, 39–48. [Google Scholar] [CrossRef]
- He, X.; Liu, Y.; Lv, C.; Ji, X.; Liu, Y. Emergency steering control of autonomous vehicle for collision avoidance and stabilisation. Veh. Syst. Dyn. 2019, 57, 1163–1187. [Google Scholar] [CrossRef]
- Zhao, K.; Zhou, R.; She, J.; Zhang, C.; He, J.; Li, X. A model predictive current control based on sliding mode speed controller for PMSM. In Proceedings of the 13th International Conference on Human System Interaction Tokyo, Tokyo, Japan, 6–8 June 2020; pp. 229–233. [Google Scholar]
- Zhang, Z.; Yang, X.; Wang, W. Enhanced Sliding Mode Control for PMSM Speed Drive Systems Using a Novel Adaptive Sliding Mode Reaching Law Based on Exponential Function. IEEE Trans. Ind. Electron. 2024, 71, 11978–11988. [Google Scholar] [CrossRef]
- Yu, X.; Feng, Y.; Man, Z. Terminal sliding mode control-an overview. IEEE Open J. Ind. Electron. Soc. 2021, 2, 36–52. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, L.; Zhao, K.; Sun, L. Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques. IEEE Trans. Power Electron. 2013, 28, 1358–1365. [Google Scholar] [CrossRef]
- Liao, Z.; Hao, Y.; Guo, T.; Lv, B.; Wang, Q. Second-Order Sliding Mode Control of Permanent Magnet Synchronous Motor Based on Singular Perturbation. Energies 2022, 15, 8028. [Google Scholar] [CrossRef]
- Huang, C.F.; Liao, T.L.; Chen, C.Y.; Yan, J. The design of quasisliding mode control for a permanent magnet synchronous motor with unmatched uncertainties. Comput. Math. Appl. 2012, 64, 1036–1043. [Google Scholar] [CrossRef]
- Xu, Q. Digital Integral terminal sliding mode predictive control of piezoelectric-driven motion system. IEEE Trans. Ind. Electron. 2016, 63, 3976–3984. [Google Scholar] [CrossRef]
- Do, V.T.; Lee, S. Neural integral backstepping hierarchical sliding mode control for a ridable ballot under uncertainties and input saturation. IEEE Trans. Syst. Man. Cybern. Syst. 2021, 51, 7214–7227. [Google Scholar] [CrossRef]
- Yang, J.; Li, S.; Yu, X. Sliding-mode control for systems with mismatched uncertainties via a disturbance observer. IEEE Trans. Ind. Electron. 2013, 60, 160–169. [Google Scholar] [CrossRef]
- Chiu, C. Derivative and integral terminal sliding mode control for a class of MIMO nonlinear systems. Automatica 2011, 48, 316–326. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Shtessel, Y.; Edwards, C.; Fridman, L. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014; pp. 213–249. [Google Scholar]
- Minh Trieu, N.; Tan No, N.; Nguyen Vu, T.; Thinh, N.T. Chattering-Free PID-Nested Nonsingular Terminal Sliding Mode Controller Design for Electrical Servo Drives. Mathematics 2025, 13, 1197. [Google Scholar] [CrossRef]
- Yao, Y.; Zhuang, Y.; Xie, Y.; Xu, P.; Wu, C. Prescribed Performance Global Non-Singular Fast Terminal Sliding Mode Control of PMSM Based on Linear Extended State Observer. Actuators 2025, 14, 65. [Google Scholar] [CrossRef]
- Junejo, A.K.; Xu, W.; Mu, C.; Ismail, M.; Liu, Y. Adaptive speed control of PMSM drive system based a new sliding-mode reaching law. IEEE Trans. Power Electron. 2020, 35, 12110–12121. [Google Scholar] [CrossRef]
- Shi, S.; Gu, J.; Xu, S.; Min, H. Globally fixed-time high-order sliding mode control for new sliding mode systems subject to mismatched terms and its application. IEEE Trans. Ind. Electron. 2020, 67, 10776–10786. [Google Scholar] [CrossRef]
- Hou, Q.; Ding, S. GPIO based super-twisting sliding mode control for PMSM. IEEE Trans. Circuits Syst. II-Express Briefs 2021, 68, 747–751. [Google Scholar] [CrossRef]
- Feng, Y.; Han, F.; Yu, X. Chattering free full-order sliding-mode control. Automatica 2014, 50, 1310–1314. [Google Scholar] [CrossRef]
- Bhat, S.; Bernstein, D. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Liu, H.; Li, S. Speed control for PMSM servo system using predictive functional control and extended state observer. IEEE Trans. Ind. Electron. 2012, 59, 1171–1183. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Name | Value and Unit |
|---|---|---|
| P | Rated power | 3 kW |
| nN | Rated speed | 2000 rpm |
| Pn | Polar logarithm | 3 |
| R | Stator resistance | 0.8 Ω |
| L | Stator inductance | 5 mH |
| J | Moment of inertia | 0.00378 kg·m2 |
| ψf | Rotor flux linkage | 0.35 Wb |
| T | Rated torque | 14 N m |
| ue | Rated voltage | 380 V |
| ie | Rated current | 5.2 A |
| Method Controller Name | Gain Value | |
|---|---|---|
| PI | Speed PI | kp = 50, ki = 20 |
| Current PI | kp = 110, ki = 50 | |
| linear sliding mode (LSM) | Speed LSM | s = 10eω, k = 1100 |
| Current PI | kp = 50, ki = 30 | |
| FOTSM | Speed FOSM | |
| q-axis current FOTSM | ||
| d-axis current FOTSM | ||
| Items | Control Scheme | PI | PFC | SMRL | FOTSM |
|---|---|---|---|---|---|
| Start up-low speed | Settling time (s) | 0.44 | 0.24 | - | 0.205 |
| Overshoot (%) | 25 | 5.7 | - | 0 | |
| Add load-low speed | Speed drop (rpm) | 93 | 36 | - | 50 |
| Recovery time (s) | 0.41 | 0.193 | - | 0.096 | |
| Start up-high speed | Settling time (s) | 0.23 | - | 0.045 | 0.133 |
| Overshoot (%) | 9.2 | - | 0 | 0 | |
| Add load-high speed | Speed drop (rpm) | 445 | - | 390 | 92 |
| Recovery time (s) | 0.7 | - | 0.4 | 0.31 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, M.; Fei, X.; Xu, W.; Cai, W.; Xie, Y.; Qiu, Z. Adaptive Gain-Based Double-Loop Full-Order Terminal Sliding Mode Control of a Surface-Mounted PMSM System. Energies 2025, 18, 2112. https://doi.org/10.3390/en18082112
Zhou M, Fei X, Xu W, Cai W, Xie Y, Qiu Z. Adaptive Gain-Based Double-Loop Full-Order Terminal Sliding Mode Control of a Surface-Mounted PMSM System. Energies. 2025; 18(8):2112. https://doi.org/10.3390/en18082112
Chicago/Turabian StyleZhou, Minghao, Xueran Fei, Wei Xu, William Cai, Ying Xie, and Zizhen Qiu. 2025. "Adaptive Gain-Based Double-Loop Full-Order Terminal Sliding Mode Control of a Surface-Mounted PMSM System" Energies 18, no. 8: 2112. https://doi.org/10.3390/en18082112
APA StyleZhou, M., Fei, X., Xu, W., Cai, W., Xie, Y., & Qiu, Z. (2025). Adaptive Gain-Based Double-Loop Full-Order Terminal Sliding Mode Control of a Surface-Mounted PMSM System. Energies, 18(8), 2112. https://doi.org/10.3390/en18082112