1. Introduction
Within modern power systems, fault identification and classification is an actual challenge where different tools such as the Hilbert–Huang transform can be used to develop techniques to find failures in complex AC systems [
1]. These systems often integrate distributed networks, causing problems such as high impedance faults, variations in current, and others where the Hilbert–Huang transform’s main features for analyzing nonlinear and nonstationary data integrated with learning techniques entail developing better strategies to detect these issues [
2]. This method has become popular for fault diagnosis, extending its use for mechanical systems concerning nonlinear dynamics [
3]. Within this context, one strategy to identify faults in brushless DC motors includes measuring three-phase current signals and normalizing them using statistical tools such as the mean, variance, and energy-based index, which can be calculated to compute variations and make fault diagnoses. It can be implemented online due to its simplicity [
4]. In the context of the Hilbert–Huang transform applications, vibration analysis for excited nonlinear vibrating systems can be addressed with this useful method for parameter identification [
5]. Online methods for fault diagnosis and detection contribute to the efficient operation of electric motors by monitoring the operating condition of the electrical system. In [
6], a method utilizing this transform is proposed for diagnosing faults in the stator structure under different load and speed conditions. Furthermore, ref. [
7] suggests a variation using the Hilbert–Huang transform in combination with a convolutional neural network for autonomous fault detection in synchronous motors. Huang et al. [
8] introduced the empirical mode decomposition (EMD) technique and its application in nonlinear and nonstationary data. The EMD is a method used to decompose a time series into components called intrinsic mode functions (IMF) that capture the nonlinear and nonstationary structures present in data. This technique is integrated with the Hilbert Spectrum to provide a more detailed representation of information in time series data, which can be valuable in various applications, including signal processing and environmental data analysis.
Due to the increased demand in production worldwide, electrical motors are subjected to complex operating conditions like overload, overheating, and other conditions, resulting in stator faults. A better way to understand different failures on brushless DC motor systems is to categorize them into critical areas, such as drivers, batteries, data-driven methods, and motor faults. This division allows information about their effects on systems like electric vehicles [
9,
10]. An innovative fault diagnosis system is presented in [
11] to recognize different faults in brushless DC motors. The system employs a feature ranking and differential evolution approach for feature selection. Initial feature extraction involves the Hilbert–Huang transform applied to four Hall sensor signals. Ref. [
12] presents a novel approach for early fault diagnosis in brushless DC motors. The method uses a fitness function in differential evolution to optimize feature selection based on the Hilbert–Huang transform from Hall sensors. Most brushless motor drives can present commutation errors due to the pulse width modulation (PWM) switching delay, which causes low-frequency current oscillations and power losses. New commutation strategies, like carrier-synchronized PWM, are being developed. This strategy can eliminate errors by switching the delay at high-speed motor rotation [
13]. The increasing use of brushless DC motors has led to studies to improve their operational efficiency, focusing on enhancements in control signals. Most control devices introduce unwanted harmonics into the currents, decreasing generated machine torque. Additionally, rotor position detection remains a topic of study, with the incorporation of methods for detecting faults in motor position sensors, which is crucial to ensure optimal system operation [
14,
15,
16,
17].
DC motor replacement in automotive cooling systems positions brushless motors as an option to enhance the efficiency of the electrical system. The high efficiency of these machines allows for better utilization of the energy provided by the battery. Ref. [
18] proposes a theoretical guide for designing and manufacturing automotive cooling fans based on brushless DC motors. Challenges related to fault detection and diagnosis in synchronous motor drivers have taken greater significance due to the increasing demand for these devices and regulatory requirements for user safety. Ref. [
19] provides a detailed review of recent methods for fault analysis in drivers for this type of motor. Different techniques have been developed for parameter estimation in signals containing multiple harmonics. Algebraic estimation approaches offer the advantage of not relying on initial conditions. This method can be applied to different signals and be implemented in real-time. Furthermore, these techniques can be employed to analyze undesirable harmonics in electrical systems, aiding in diagnosing potential failures [
20]. Moreover, artificial intelligence can improve these methods for high precision and adaptability under a neural networks approach [
21]. The experimental platform used in this manuscript is described in [
22]. Some approaches for fault detection are based on the fast Fourier transform (FFT) and wavelet transform to detect electrical and mechanical failures by analyzing the frequency spectrum through vibrations generated by induction motors [
23,
24]. In addition, these methods based on different tools for signal analysis are being integrated with artificial intelligence (AI) [
25,
26]. In the same way, electric machine drive systems have similar structures where fault diagnosis is highly required. Failures such as open-circuit faults are presented in any motor driver device where its detection plays an important role in keeping the correct motor operation [
27].
When electrical motors are powered by electronic controllers and are used in transport applications, fault diagnosis in these devices is relevant for increasing safe operation. The proposed method presented in this research manuscript is based on current signals analysis. The first step involves obtaining electrical currents from the electronic speed controller (ESC) without knowing the previous device state. Then, the Hilbert–Huang transform is employed to estimate amplitudes and frequency parameters. The main advantage of using this algorithm is the adaptability over signal variations since the empirical mode decomposition allows for identifying each intrinsic mode function; instantaneous frequency enables the detection of any frequency change along the time in the signal. These changes are commonly presented in motor drivers since speed manipulation in the device results in amplitude and frequency changes. The next step is to calculate the percentage error between each signal parameter. According to international electrical standards, the imbalance for mid-tension and low-tension systems should be below 10 percent [
28]. The error between signals is computed with amplitudes and frequencies from signals’ fundamental components. If the error exceeds the allowed percentage, early faults can be identified. Instantaneous frequency is employed to obtain data about the speed changes over time, meaning that signals can be obtained in any time window. This paper is organized as follows:
Section 2 provides a detailed method description and a brief insight into the Hilbert–Huang transform algorithm employed to develop this technique. A simulated case is conducted to demonstrate the effectiveness of the proposed method.
Section 3 provides a comprehensive overview of the experimental platform and the devices used in this study. Moreover, a detailed description of how to implement this methodology in any brushless DC motor speed control device is given. In
Section 4 the obtained results are presented. This analysis aims to identify any deviations or abnormalities in the power lines that may impact the motor’s operational conditions through amplitude and frequency estimation using the Hilbert–Huang transform. Through extensive experimental tests in different operation conditions, parameters can be compared to establish the system where faults are present. Lastly, the conclusions are addressed in
Section 5. This approach proves its simplicity and potential for extension to various electrical fault diagnoses. This innovative approach can detect early faults in electronic speed controllers used in brushless DC motors.
2. Early Fault Detection in Motors’ Electrical Systems Based on the Hilbert–Huang Transform
In the context of motor drivers, switch devices commonly present faults due to high-frequency operation, power stress, and other operation conditions. Open-circuit faults commonly occur for gate signal failure or wire disconnecting. The consequence of this fault is that the drive system loses balance and the motor’s rotor is subjected to an imbalanced force, resulting in bad behavior. Short-circuit faults often result from high voltage, overheating, or errors in gate signals; the power consumption increases while the complete system is damaged. In these situations, protection circuits in the device suffer central damage, often needing to be replaced [
10]. In this sense, early fault identification techniques are crucial in reducing these issues.
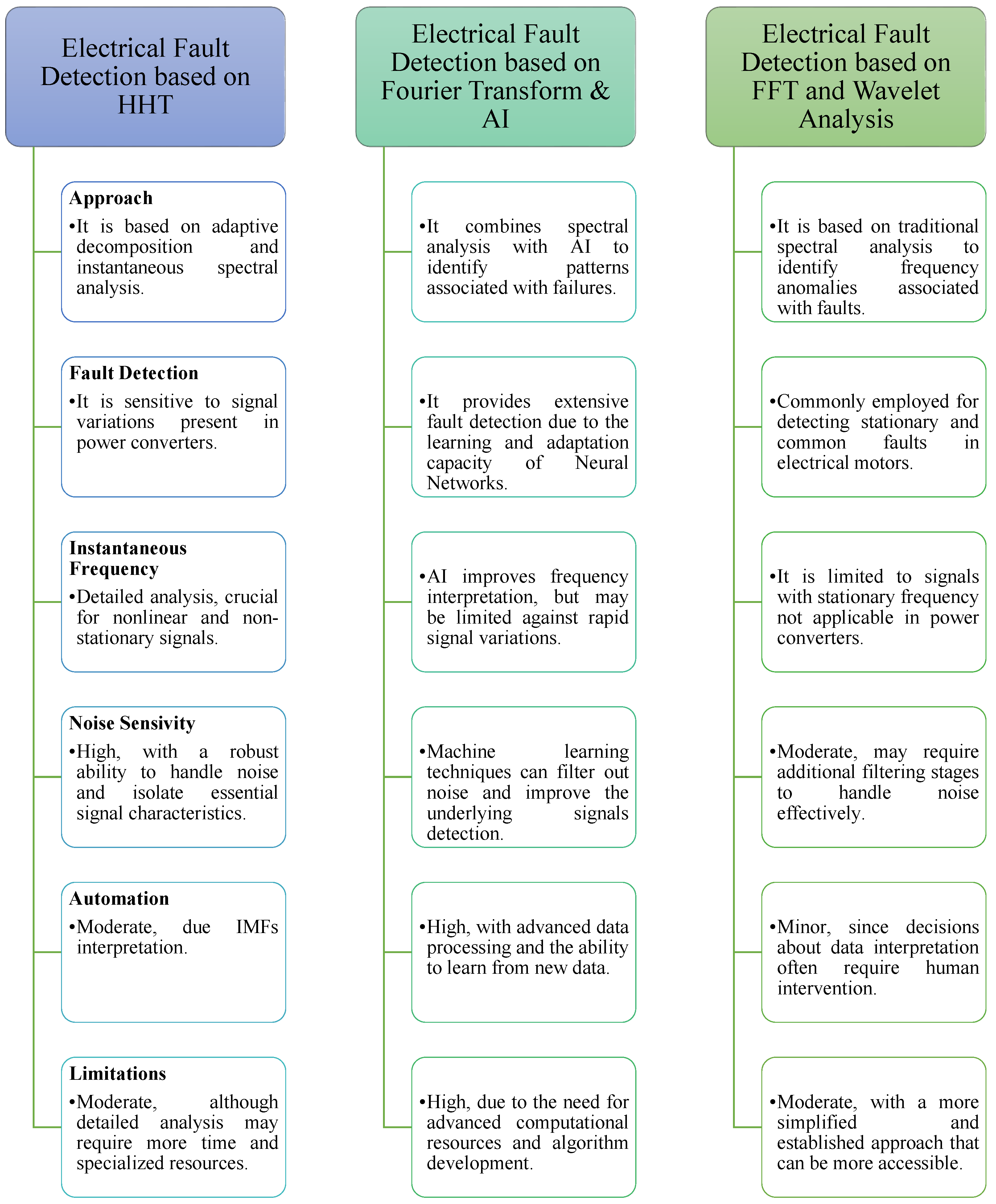
The challenges for solving these problems in motor drivers entail developing different approaches with various signal processing tools. Some approaches reported in the literature for detecting faults in electric motor systems use the Hilbert–Huang transform, the FFT, wavelet analysis, IA, and others. Commonly, vibration data are employed to detect mechanical faults [
23], while electrical signals are analyzed to estimate specific parameters and detect faults in the motor and the driver [
24,
25,
26,
27]. In
Figure 1, a comparison between different approaches for electrical fault identification is depicted.
2.1. The Hilbert–Huang Transform
The Hilbert–Huang transform is a method that combines two steps to analyze non-linear and non-stationary signals. The first step involves the EMD, which decomposes a signal,
, into a set of intrinsic mode functions
. For a component to be considered as an IMF, it must satisfy two conditions: first, the difference between the number of extrema (maxima and minima) and the number of zero crossings must be zero or one. Second, the mean of the high and low envelopes, defined respectively by the local maxima and minima, must be a value less than the stopping criteria value and approaching zero at any point of the signal.The decomposition process begins with
local extreme identification followed by envelope generation through local maximum and minimum interpolation. After extracting the envelope’s mean, the resulting signal is examined to determine if it meets the features to be an IMF. This process is repeated on the residual signal obtained until it does not satisfy the criteria to be considered an IMF or represents only a non-significant trend modulation. These IMFs represent different oscillation modes present in the original signal as follows:
where
is the residual trend. Once these oscillating modes are obtained, the Hilbert Transform is applied to each one to obtain each oscillation mode’s instantaneous envelope and phase. This procedure can be expressed as
where
is the instantaneous amplitude and
is the instantaneous phase. The instantaneous frequency
can be extracted from the instantaneous phase. The formula to determine this frequency is
although “instantaneous phase” and “instantaneous frequency” are often used indistinctly, it is important to mention the difference between them in this context. The instantaneous phase includes information about how this phase varies in time, while the instantaneous angle could be generally referred to as the instantaneous signal orientation in the complex plane. This distinction is fundamental when the instantaneous frequency is analyzed, which means that the point of interest is how the signal orientation (phase) changes over time. The instantaneous envelope provides information on how the amplitude and phase of each mode vary over time. The result is a time-frequency representation of the original signal, where each oscillation mode is represented by its instantaneous envelope and frequency [
8].
2.2. Proposed Method
This article segment presents a simulated situation where the proposed method for early fault identification is applied to a complex signal obtained in the context of a balanced three-phase electrical system. Consider the balanced system described by Equations (
5)–(
7). This simulated system can be taken as a reference for ESC outputs. For simulation purposes, three harmonics are considered in each signal.
where
is the signal amplitude,
is the frequency,
t is the time, and
is the phase. The amplitude values used for this simulation are
,
,
, and
and the frequencies values are chosen as
Hz,
Hz,
Hz, and
Hz. And for this specific case, phases values are established as
and
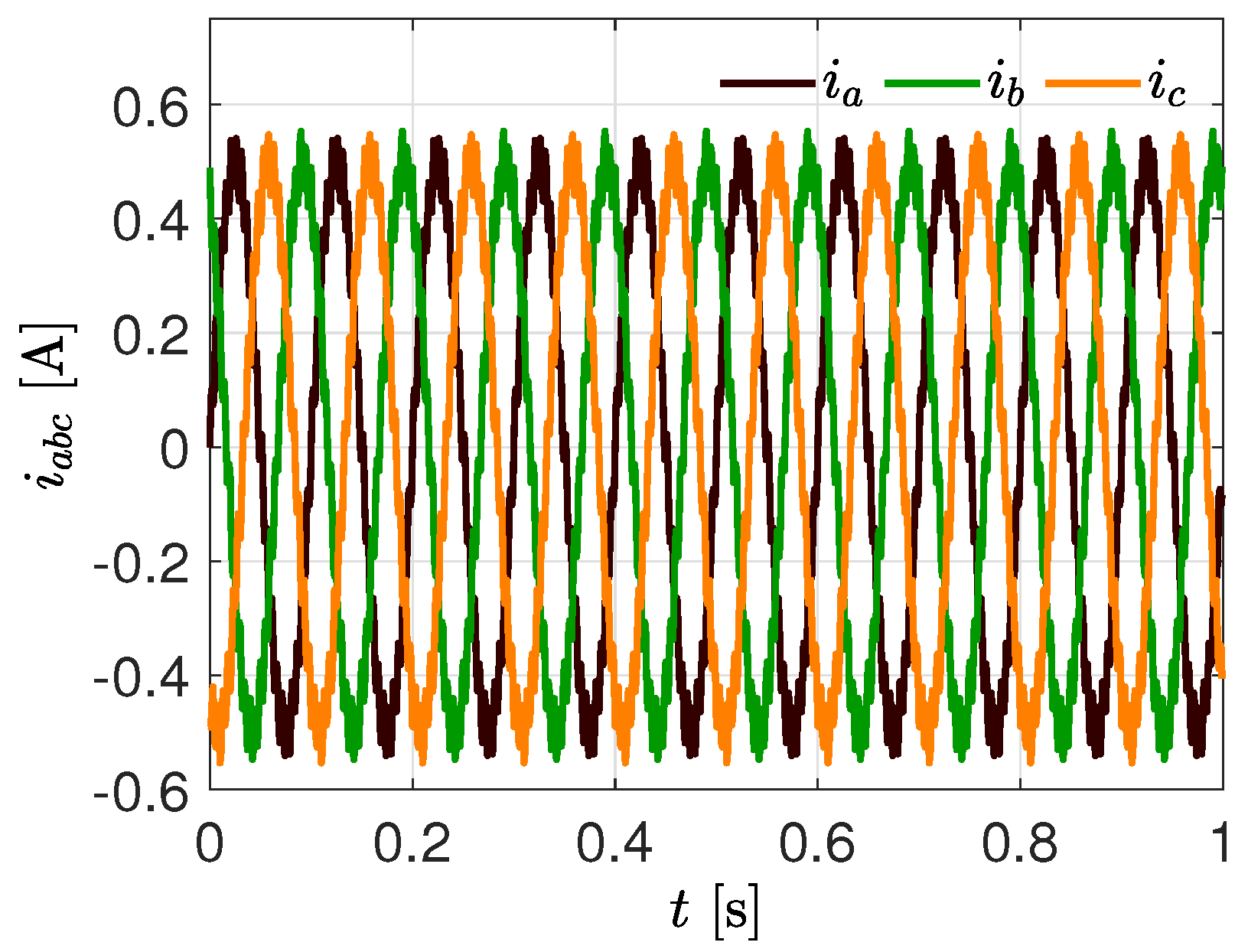
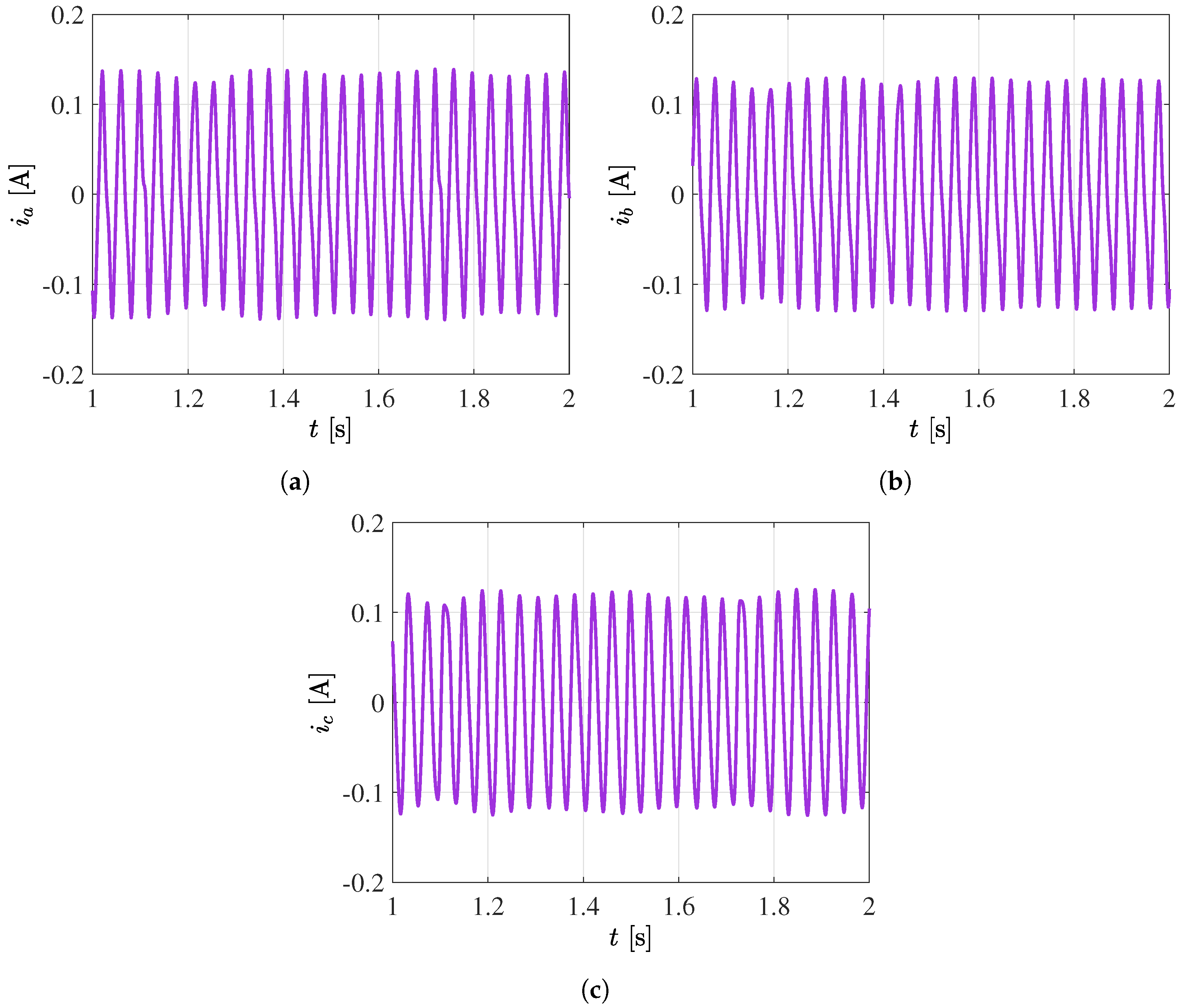
. From the initial signals
,
, and
, representing a three-phase system shown in
Figure 2, its oscillating modes will be extracted with the Hilbert–Huang transform. The algorithm developed for the EMD was improved by including stoppage criteria to obtain each signal component [
5].
Once the estimated parameters have been obtained, percentage amplitudes and frequency errors are calculated to establish a healthy system. For different applications, a balance system is described as
[
29,
30]. However, real electrical systems do not present this property. Disturbances could occur in three-phase systems for the following reasons: asymmetry in load distribution per phase, connection of single-phase or two-phase loads, operation of single-phase protection devices or capacitor banks, and asymmetry in the arrangement of the phases in the load center facilities. Voltage and current imbalances affect the quality and reliability of the electrical supply. They produce overheating and undesirable vibration in the rotating electrical machinery, overheat the transformers and conductors, reduce the useful life of the electronic components, increase the losses due to the Joule effect in the system’s transmission and distribution, and affect the operation of protection systems. The current imbalance in three-phase systems is expressed as a percentage and is defined as
with
where
, and
are the RMS magnitude of each phase. These indicators are based on international standards such as IEEE-519-2014 where for high tension imbalance should be below 2% for mid-tension and below 10% [
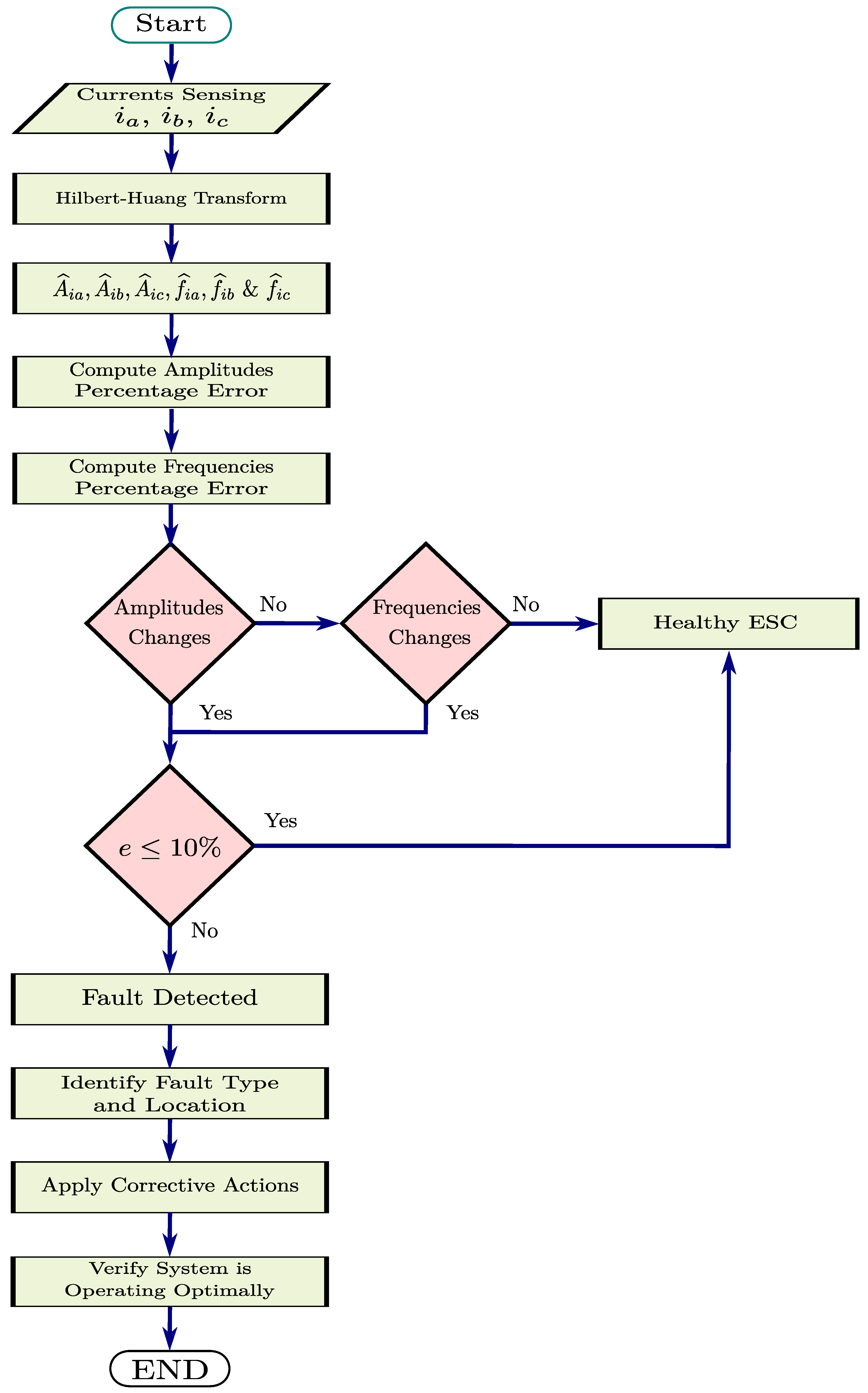
28] for low-tension. The threshold can be selected below 10 % for low tension in this context. Any current anomaly allows for the fault location in the specific power line as each signal error is compared. Once the fault is located, maintenance actions must be carried out. This procedure is shown in the following diagram in
Figure 3.
As previously mentioned, power transistors present most electrical faults in motor drivers; a short-circuit fault means the switch is always closed and replacement of this component is often the fault solution. Open-circuit faults are a common problem in general electrical motor drivers; errors in switching signals or gate drivers entail failures in transistors. Thus, the electrical system affects the motor’s operation [
27]. Moreover, the signal variations occur in the ESC outputs when a different speed is required due to the gate manipulation inputs; the signal parameters changes at these instants can be addressed by the Hilbert–Huang transform. Then, once the errors have been calculated, an early fault is identified, taking
Table 1 as reference, different issues can be described. By taking the threshold for fault identification, each line error allows for finding the specific line where the issue is happening. The faults can be classified within the short-circuit and open-circuit contexts. By evaluating these differences, the failures can be classified; an error in the amplitude can cause undesirable behavior in the motor, such as a reduction in torque and an increase in current demand, indicating a possible short-circuit fault. Moreover, although the driver changes frequency due to speed motor manipulation, the balance between them should be the same for the three signals. However, after amplitude anomalies have been detected, a frequency diminution will manifest in motor speed reduction.
2.3. Simulated Case Study Analysis
The main objective of this analysis is to obtain relevant and detailed information about the signal and its fundamental characteristics. The previously described process is applied, which involves decomposing the signal into three distinct oscillatory functions. This decomposition uses the Hilbert–Huang transform, known for its high precision in representing complex and nonlinear signals.
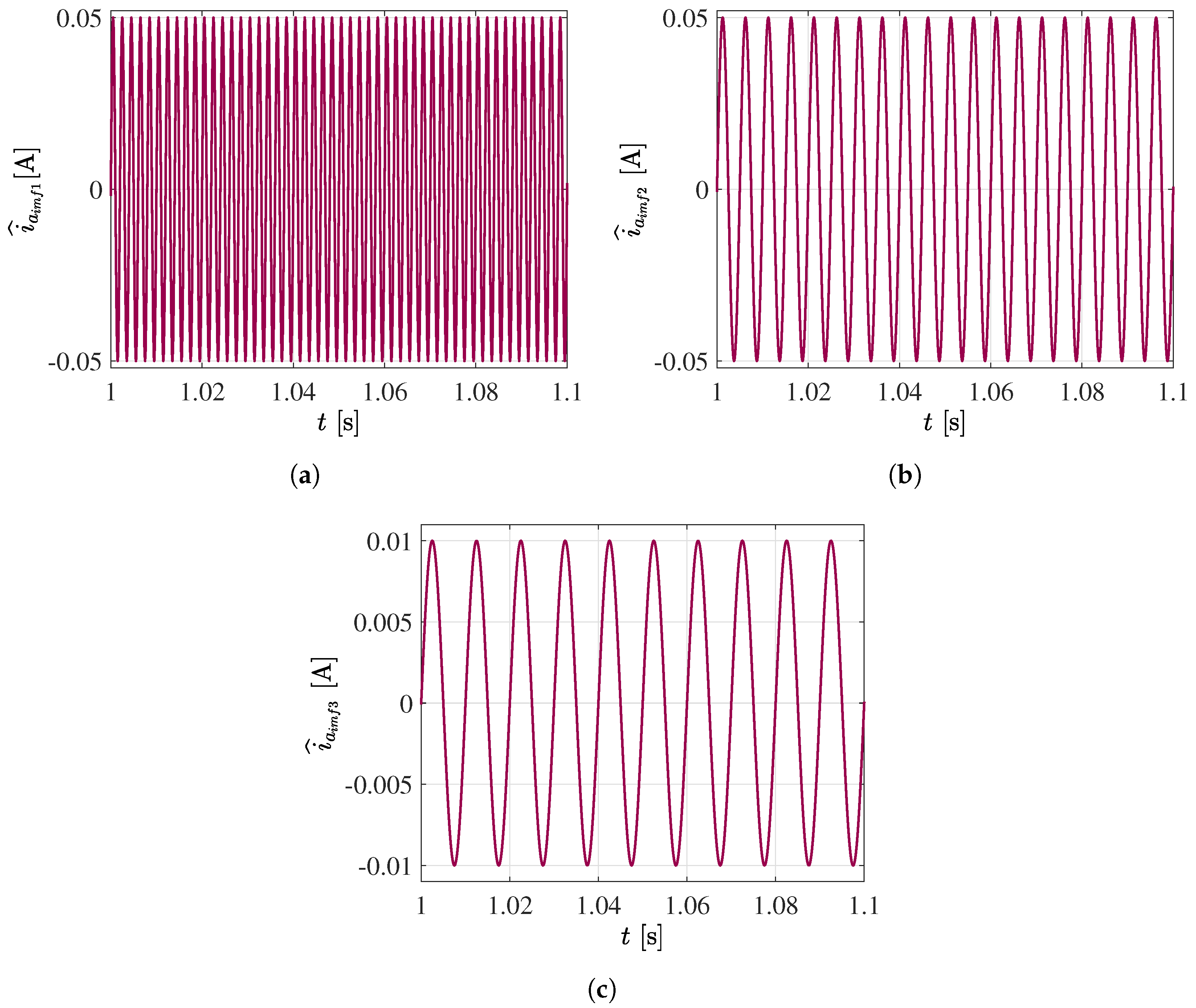
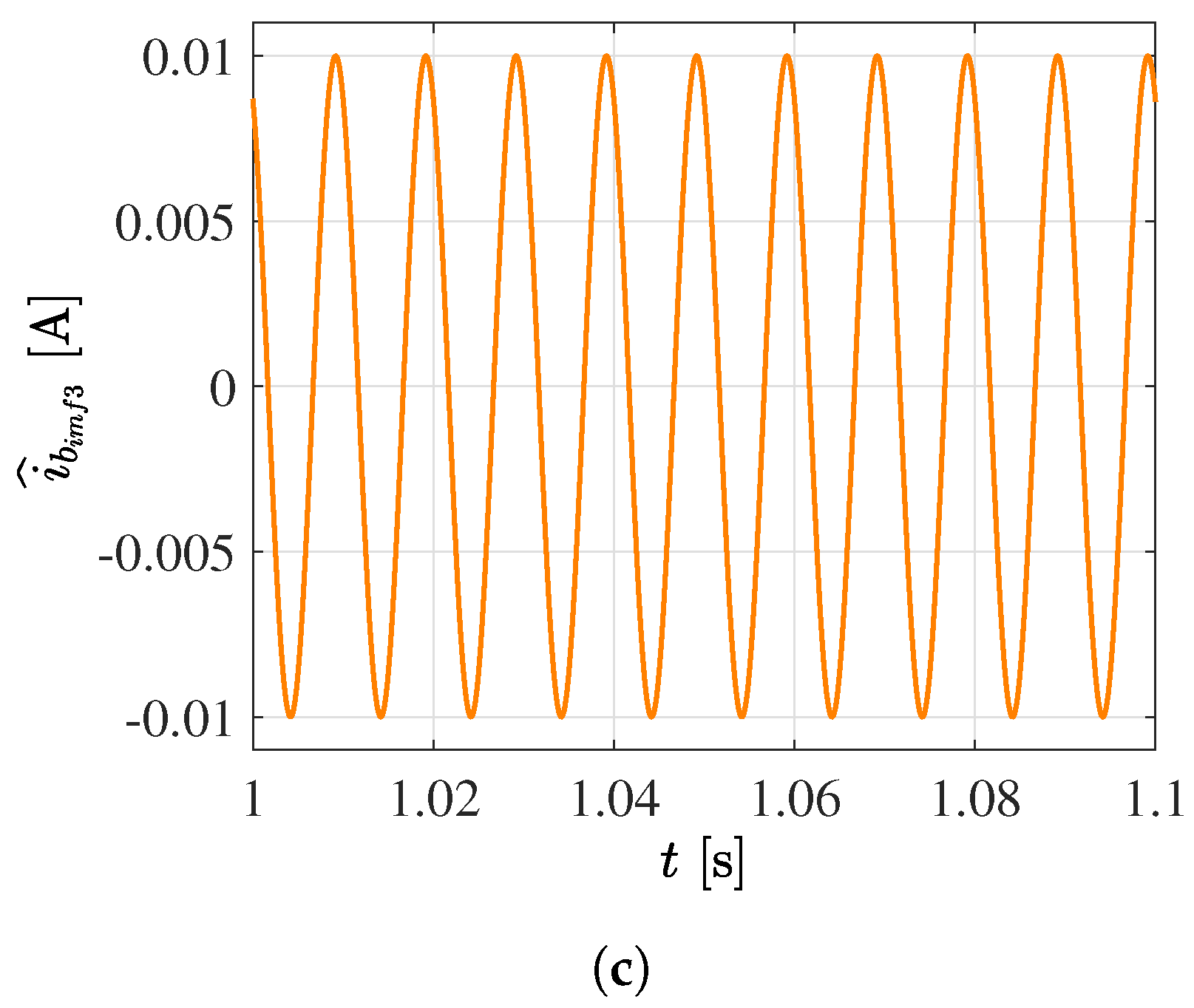
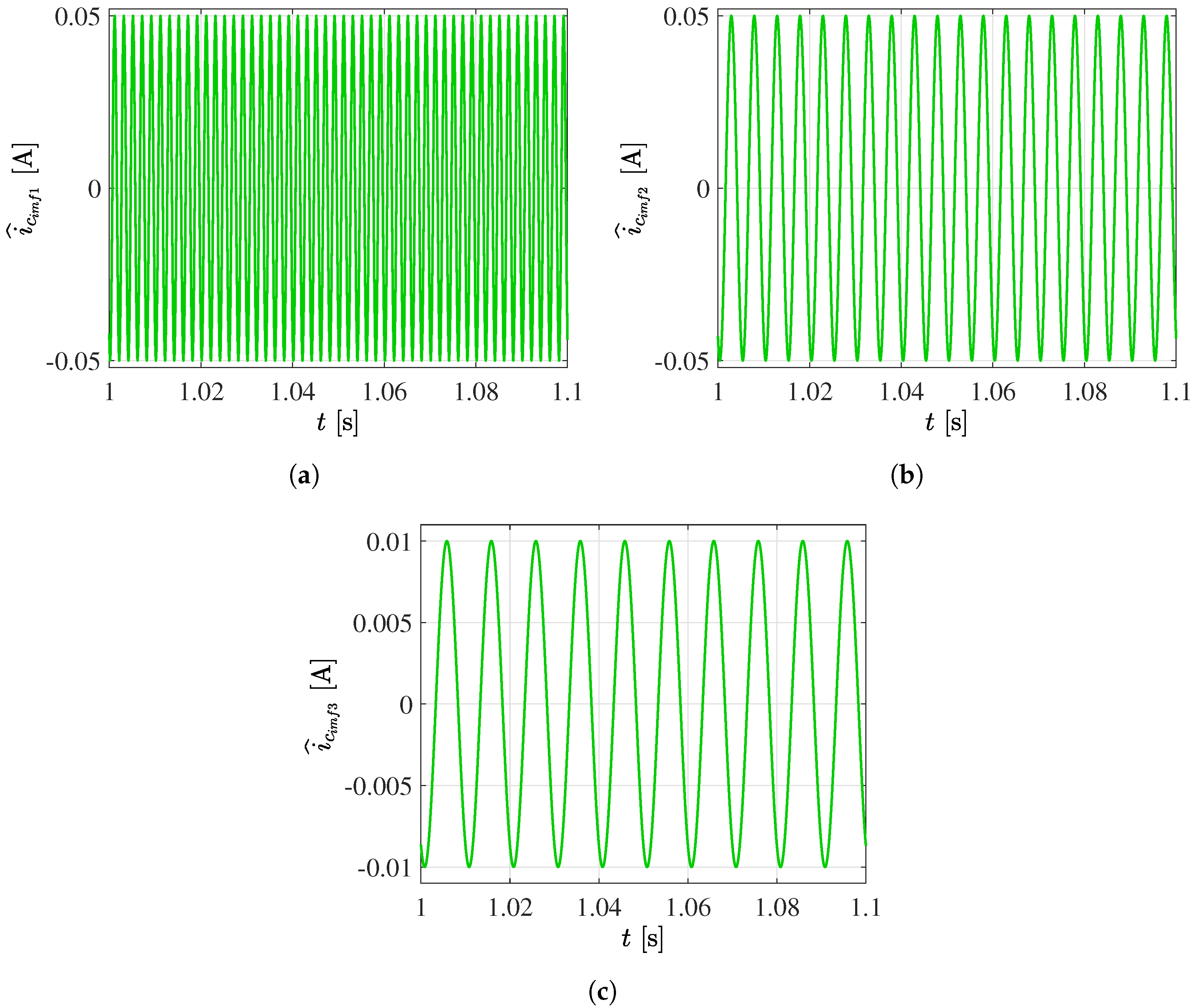
Figure 4,
Figure 5 and
Figure 6 illustrate how the Hilbert–Huang transform decomposes the original high-frequency signal into its oscillatory components. Each component represents an oscillation or mode present in the original signal. This capability to separate the signal into its fundamental components is essential for the detailed analysis of complex signals in various fields. An important point to emphasize is the Hilbert–Huang transform’s high precision in estimating these oscillatory components. This affirmation is evident in this approach to signal decomposition and analysis provides valuable insights into the nature of the signal.
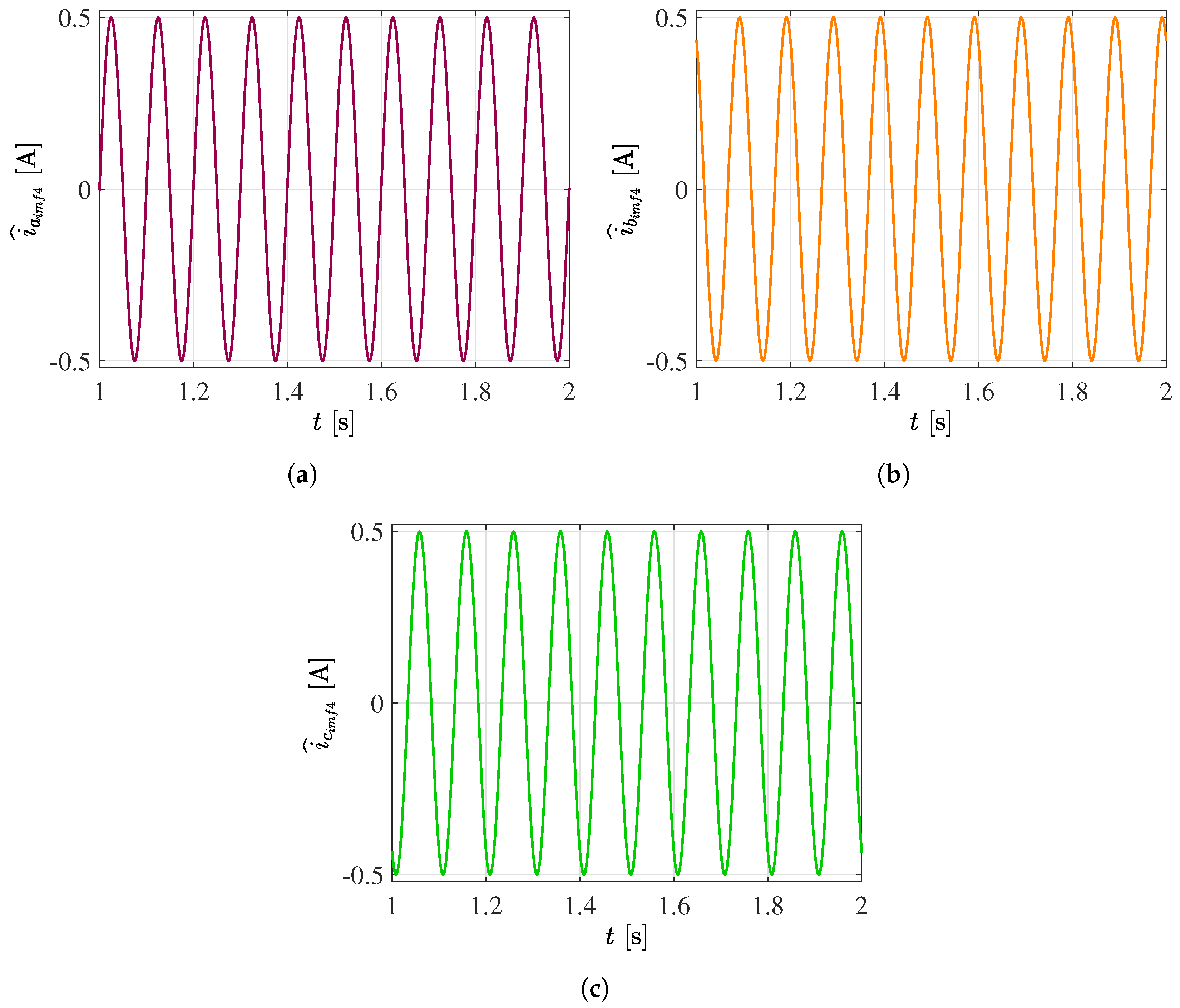
The initial modes extracted exhibit signals with very high frequencies and small amplitudes. Thus, they can be ignored in the analysis of this system. Nevertheless, it is noteworthy that the method, despite encompassing multiple frequencies, precisely extracts the components, leaving only the primary current signal for parameter analysis
Figure 7.
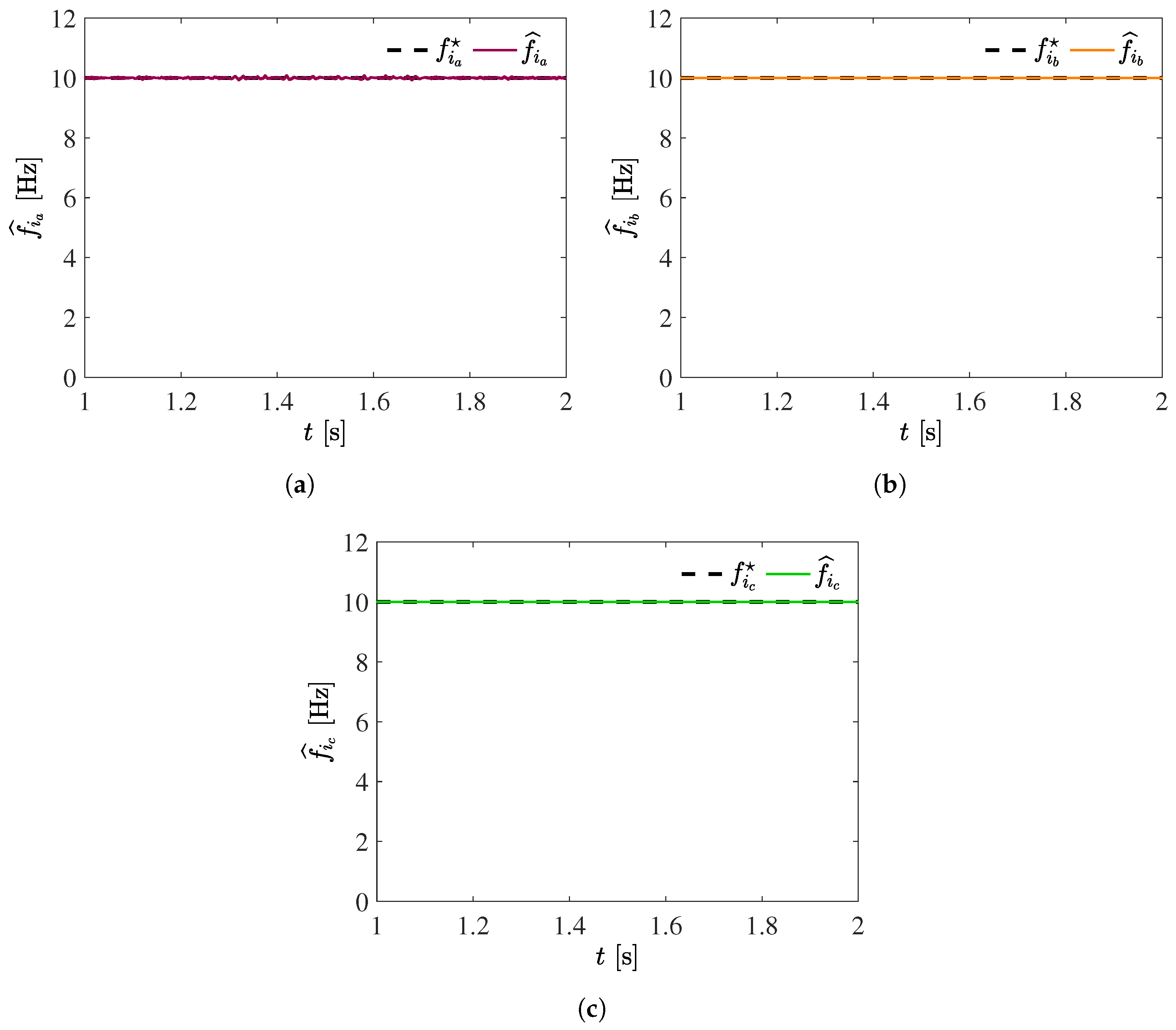
From estimated signal oscillatory components
, their frequencies can be extracted through the instantaneous phase angle derivative calculation and signal’s average value computation, as illustrated in the previous study conducted by [
5]. This frequency extraction process is fundamental for gaining insights into the signal’s nature and underlying components.
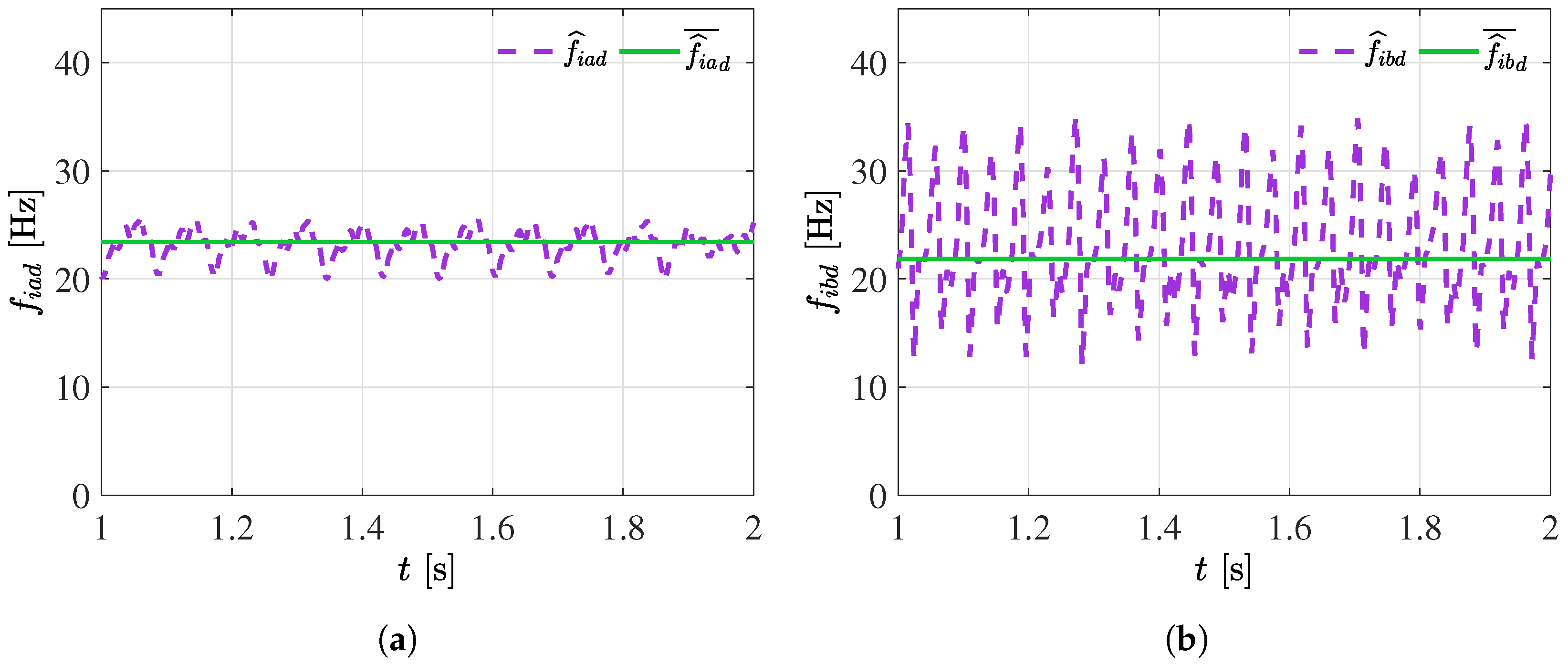
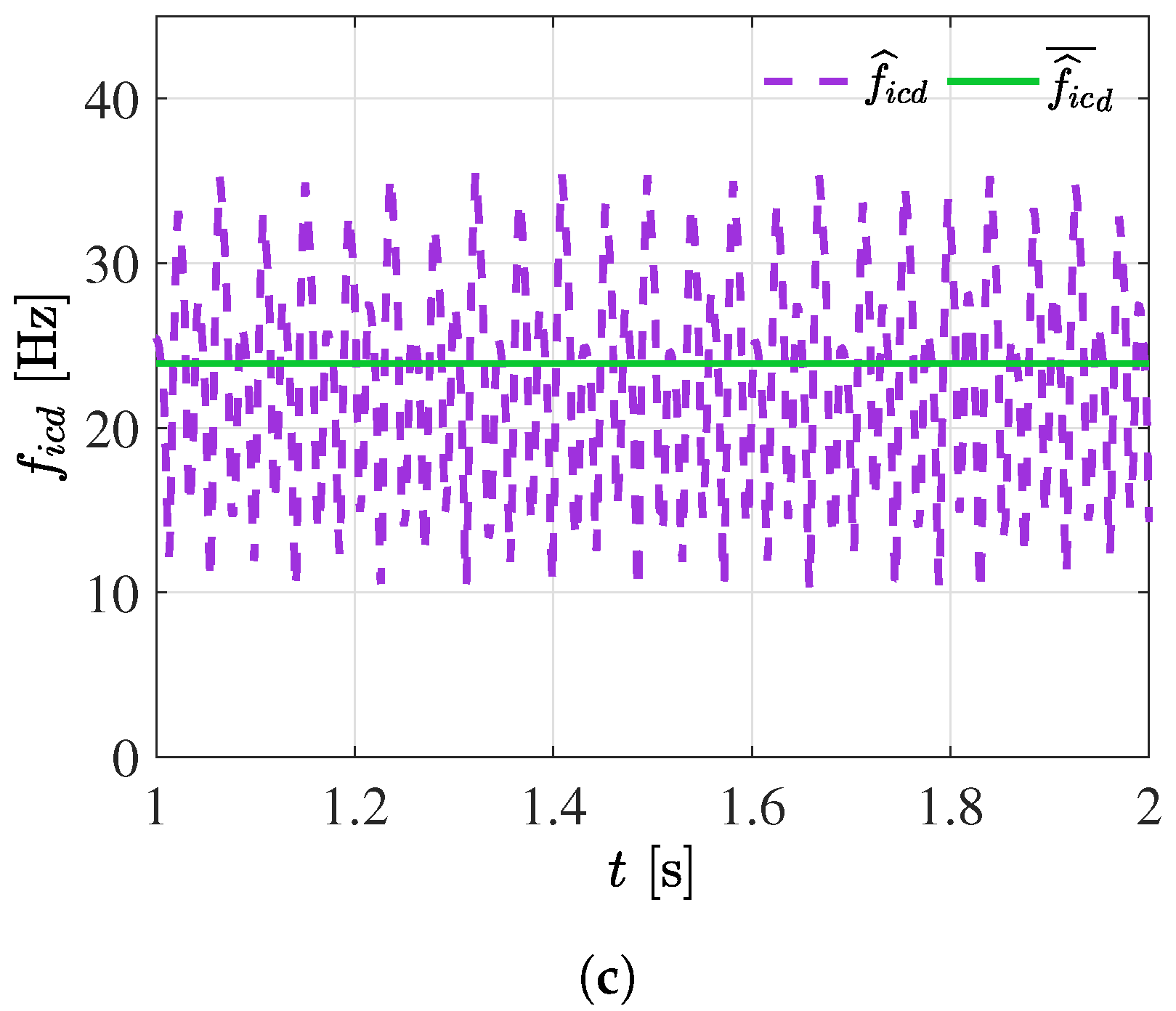
Figure 8 presents an original signal frequency visual representation, where
represents the fundamental signal components. The estimated frequencies from process analysis using the Hilbert Transform are represented by
. Averaged frequencies are computed by taking the estimated frequencies mean over time. These averaged frequencies offer a more stable and representative insight into the signal’s frequency characteristics, which can be highly valuable in signal analysis applications, requiring a more general and simplified description. All of these frequencies are depicted in
Figure 8a–c.
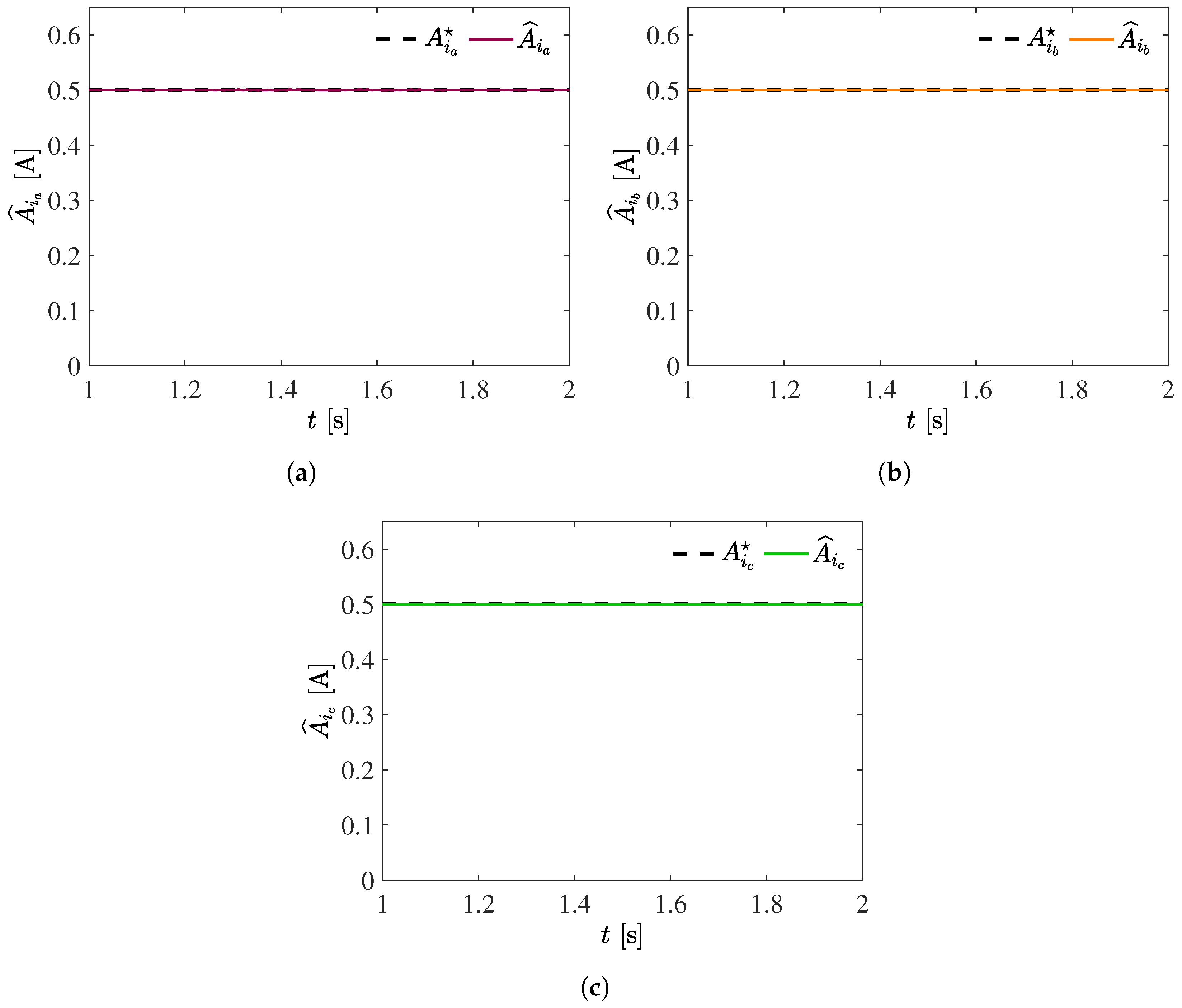
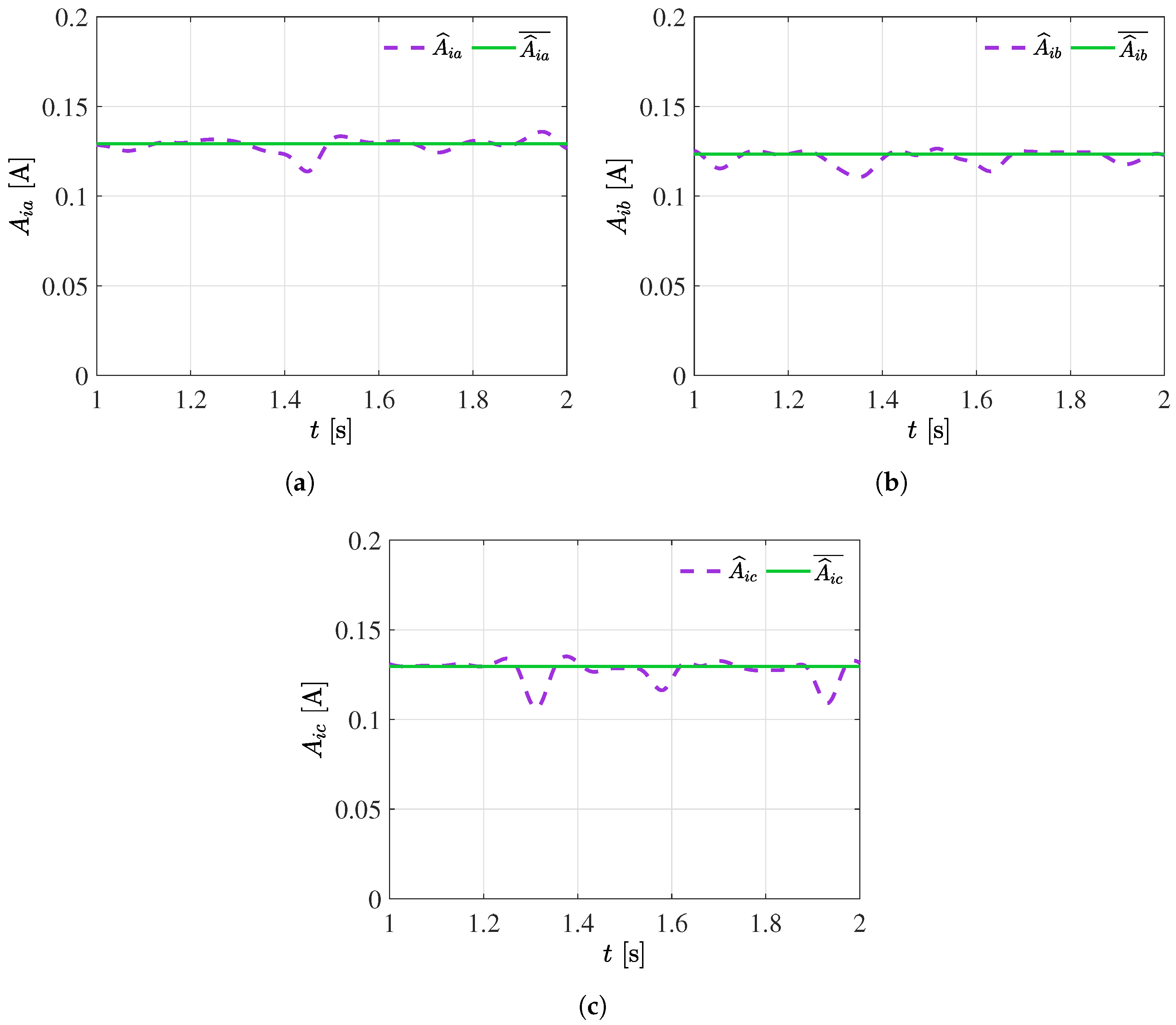
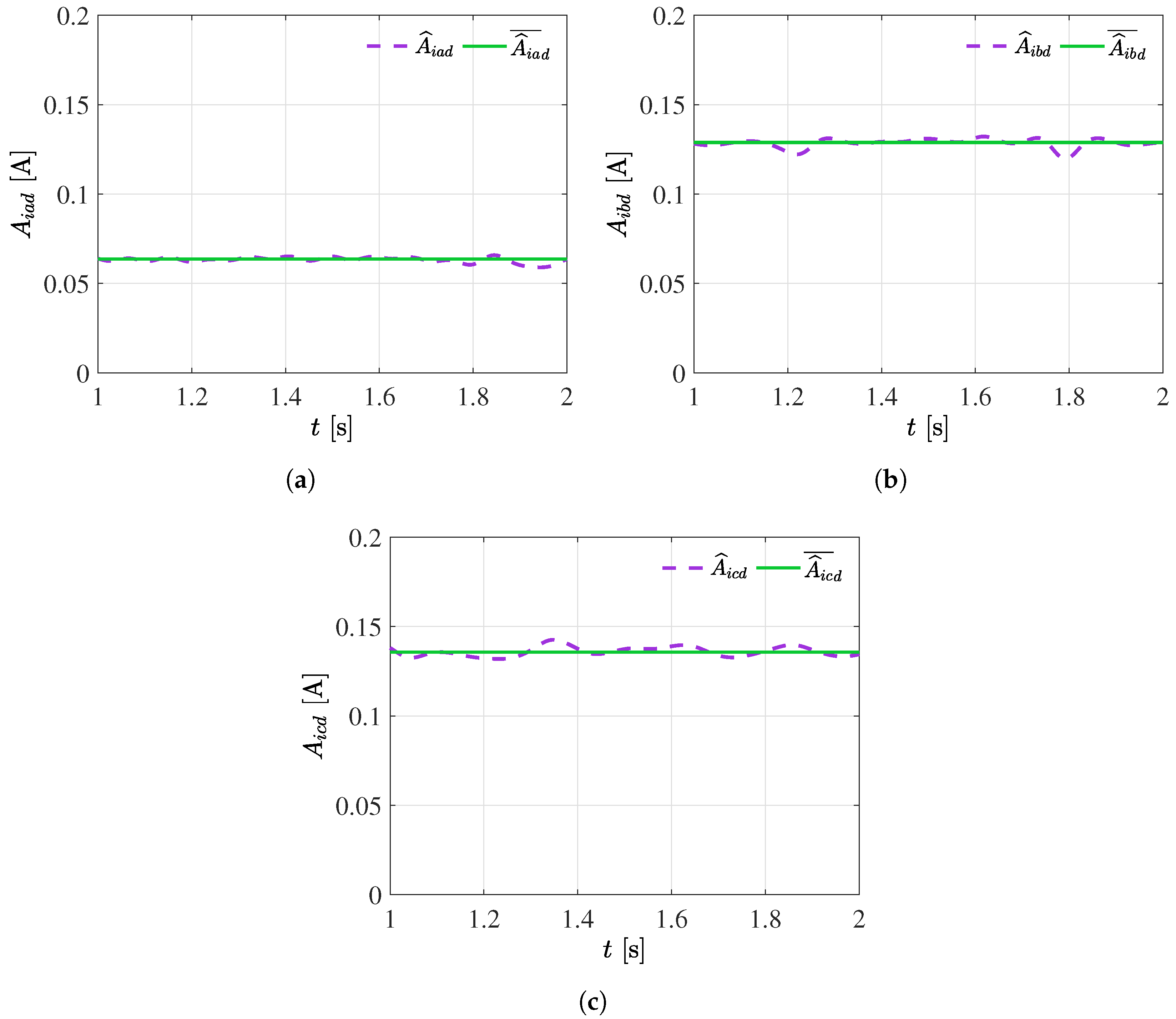
The amplitude extraction process is based on the absolute value calculation of each oscillatory signal. This stage is fundamental for accurately quantifying oscillatory components’ intensity. Original amplitudes’ obtention, denoted as
, allows the signal’s intrinsic characteristics to be known before processing. These original amplitudes represent the magnitude of each fundamental component presented in the original signal. On the other hand, the estimated amplitudes, represented as
, are the analysis process results using the Hilbert–Huang transform. The comparison of original amplitudes and estimated amplitudes is essential for evaluating the analysis process’s effectiveness and quantifying signal changes or disturbances.
Figure 9a–c shows each amplitudes’ computation process.
All these features are presented in detail in
Table 2, which includes information about the estimated frequencies and amplitudes of the identified oscillatory components in the processed signal. Furthermore, the percentage error value has been computed for each parameter and it is worth noting that all these error values are below one percent, considering these signals to be a healthy system. This low error rate demonstrates the effectiveness and precision of the method that can be used to identify early faults in electronic speed controllers.
3. Case Study: Proposed Method Application for Early Fault Detection in Electronic Speed Controllers
This case study explores the proposed method application for early fault detection in electronic speed controllers used in brushless DC motors. Several tests were conducted using different devices, obtaining similar results. The rest of the document describes the main results of two ESCs. This analysis allows for comparing the operational ESC parameters, demonstrating the method’s efficiency in fault detection. Below, the values of the operating motor used in the experimental stage are provided.
Nominal voltage: 160 V;
Nominal Speed: 3000 rpm.;
Power: 157 W;
Winding type: Delta, four poles;
Position detection: Hall effect sensors.
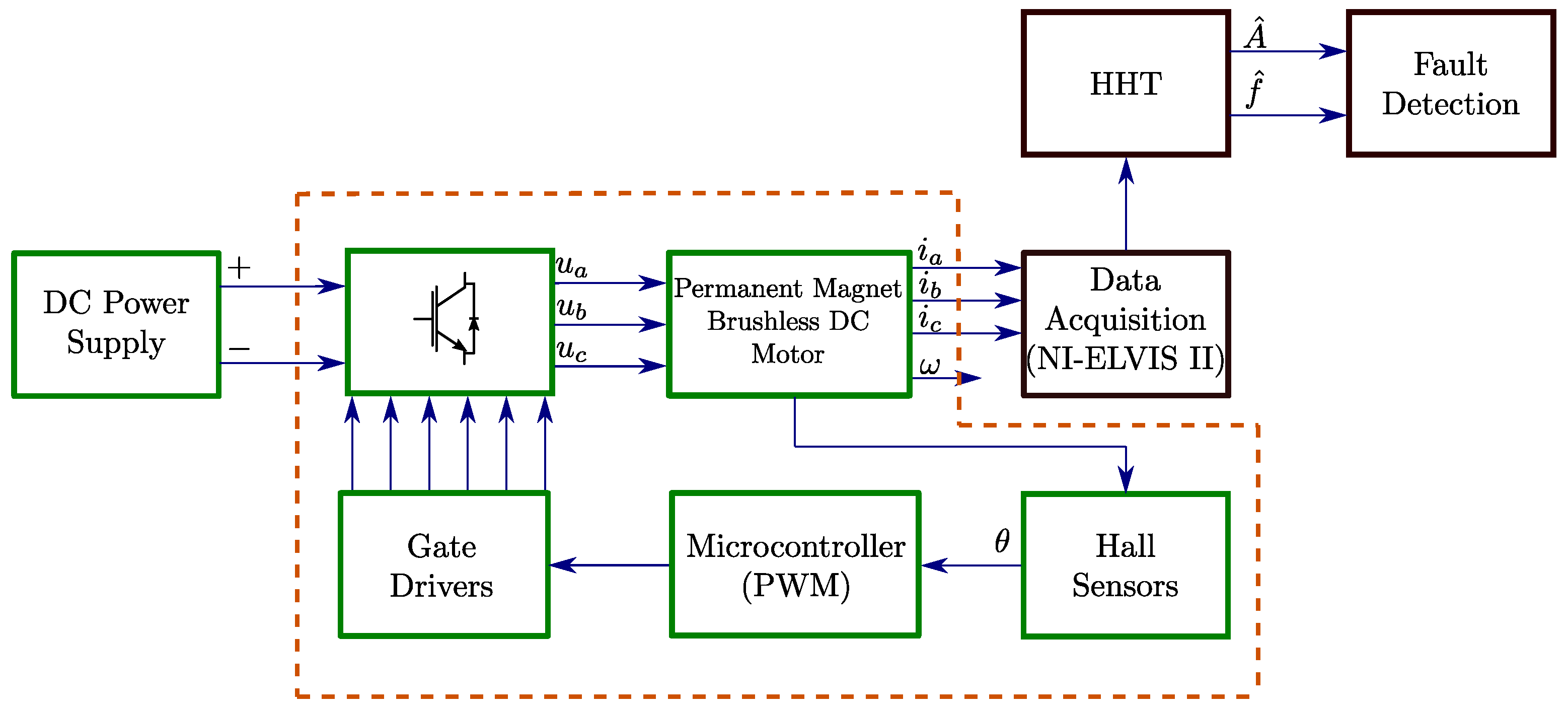
The scheme illustrated in
Figure 10 outlines the methodology applied to the ESC system. Initially, a brief description of the ESC system is provided, wherein the motor’s position is determined through Hall effect sensors. The acquired position data are the foundation for generating pulse-width modulation signals compatible with a wide range of data acquisition boards. The precise duty cycle control is achieved using a microcontroller with analog input capabilities. A lookup table is constructed based on sensor data to further enhance the accuracy of the brushless DC motor’s speed and position control. This table is a reference guide, ensuring the motor receives the exact voltages necessary for precise control, as outlined in [
22]. The diagram in green represents this comprehensive description of the ESC operation.
Current extraction can be conducted with any industrial sensor. ACS712 sensors sourced from Digikey, Mexico City, Mexico, are employed in this study. Subsequently, signal processing is carried out using NI-ELVIS II hardware within Matlab version 2020a. environment, facilitating the capture of current signals. The Hilbert–Huang transform can now be used as was described in
Section 2 to analyze ESC signals, obtaining crucial amplitude and frequency parameters represented in the diagram in red color. Amplitude changes allow for identifying specific motor lines where the fault is present. Thus, a non-balanced three-phase system has a consequence of overheating present in power devices. Moreover, frequency changes reduce the speed and low torque the machine delivers. This approach represents a straightforward implementation and is a highly effective means of early fault detection in ESCs.
The current signals extracted from the physical system are denoted by , , . , , and , which are the supply voltages from ESC. represents motor’s position, represents the motor’s speed, is the estimated currents’ amplitude, and are the estimated frequencies. If the error exceeds the established threshold, a power line failure exists. The Hilbert–Huang transform is an effective method since it does not need any signal parameter. These parameters will be estimated and then a damaged system can be detected by comparing both signal groups.
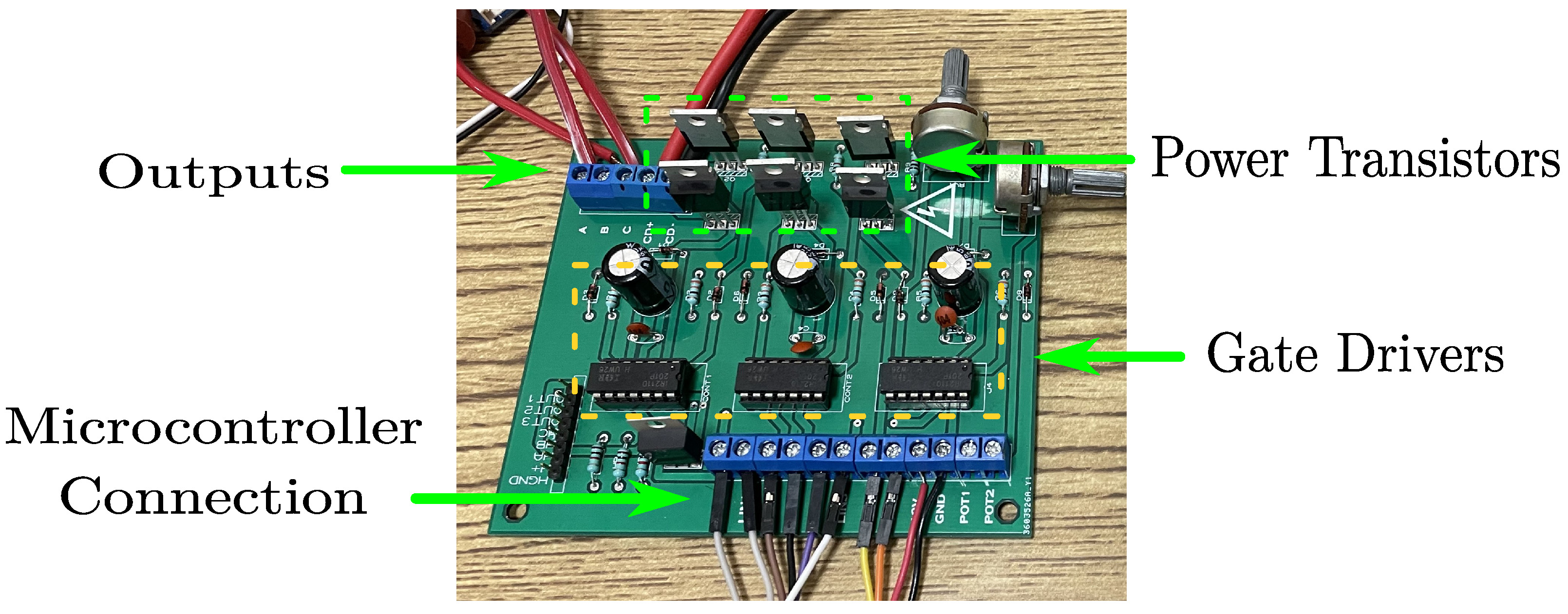
In most modern systems where electrical motors are employed, control panels concentrate and distribute connection devices, requiring qualified personnel to realize maintenance tasks. In this context, the information of these systems is often given through interfaces where data access is restricted. Nevertheless, physical connections are always available to collect electrical data with any device [
10]. So, for this study,
Figure 11 shows the physical ESC. A pair of switches control each phase of the system, which means that any transistor could present failure at any time. In the experimental test conducted on a healthy system, no irregularities in motor operation were detected. However, when dealing with a damaged system, the brushless motor exhibits noticeable vibrations and a significant speed reduction. A thorough examination shows that a specific transistor tends to experience overheating issues that directly affect line A.
In the context of brushless DC machines, parameter changes are common in motor control devices due to speed manipulation. As the speed increases or decreases, amplitudes and frequencies will be affected in each transition. The Hilbert–Huang transform can adapt to these changes; the EMD decomposes the signal in IMFs, allowing the fundamental components at any voltage range to always be the focus. In the same way, instantaneous frequency can capture disparities at any motor’s speed. The main ESC features used in experimental stages are described as follows.
Voltage range: 12 V–300 V;
Nominal current: 5 A;
Switches: MOSFET (IRF840);
Bootstrap-Source: 12 V;
PWM generation: At-Mega328;
Control: Manual mode.
Several tests were performed with different voltages. Equation (
10) is a reference to determine frequencies corresponding to the voltages and currents. This formula can be employed for each experimental test case to calculate the waited speed through the system’s estimated frequency and number of pair poles.
The motor’s speed is represented by
in rpm,
f is the signal frequency in Hertz, and
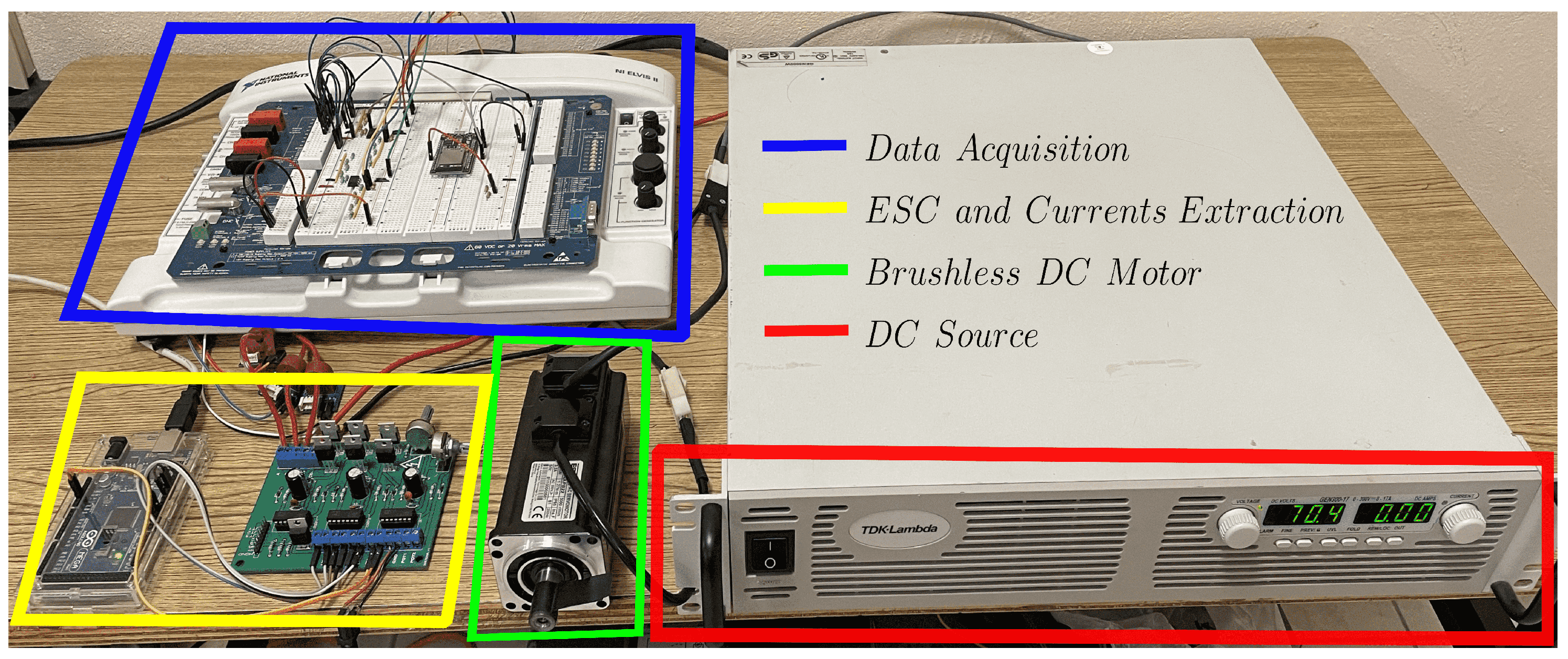
p is the number of motor pole pairs. Physical tests aim to extract current signals from a device that is in good condition and a damaged circuit. When signals are obtained, multiple harmonic components are observed.
Figure 12 shows physical devices for the experimental stage.
5. Conclusions
In this study, a novel approach based on the Hilbert–Huang transform was developed for early fault detection in brushless DC motor drivers. First, current signals were extracted from the system without previous knowledge of its state. Then, amplitude and frequency parameters were estimated using the Hilbert–Huang transform. The international electrical standards were used to establish a threshold by calculating the error between the three-phase currents and the motor’s performance. After computing the error, the imbalance threshold should be below 10 percent. Once the parameter error is calculated, a healthy or damaged system is identified, and early faults can be identified in the specific motor line. Rigorous simulations and experimental tests in different voltage conditions validate the proposed method. The early faults detected in the system involve the imbalance in power supply due to discrepancies in estimated amplitudes; this problem also results in torque reduction and increasing current demand. Also, the frequency diminution identifies the reduction in motor speed. These issues in the driver occurred due to power transistor damages. The Hilbert–Huang transform presents advantages over signal variations. However, although the EMD can decompose each signal component, a filter process is recommended. The approach proposed in this study has the advantage that data can be collected from motor drivers without stopping their operation at any time window, allowing for early fault detection in motor drivers. The platform presented in this study can be used with other important techniques for detecting faults, such as Fourier transform, artificial intelligence, FFT, and wavelet analysis for future work, which will be implemented to improve the systems for fault detection.


 ,
, 





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}