1. Introduction
In the field of traffic safety, reactive measures to inappropriate behaviours like wrong-way driving, distracted driving, and intoxicated driving often come into play after collisions, posing significant risks. This paper argues for a shift towards proactive response strategies that aim to prevent such risky behaviours before accidents occur. Our proposed solution involves a collaborative misbehaviour response system designed to address hazardous driving actions in advance. The system works by collecting alerts from two different misbehaviour detectors: wrong-way driving detection, driver monitoring for signs of distraction or impairment, as well as collecting parking lot availability using parking lot detector service. When an alert is received, the system quickly identifies the nearest available parking space using data from interconnected parking facilities. It then generates a navigation route to the safe location and includes it in the initial alert, helping authorities and nearby vehicles guide the misbehaving vehicle to safety. To align with the evolving automotive landscape, our system shows the potential to seamlessly integrate with electric vehicles. Combining the MBR System with EVs, a range of advantages can be realized, especially in the areas of energy efficiency optimization and leveraging the advanced capabilities of the vehicles. This integration highlights our commitment to addressing emerging challenges in road safety while ensuring compatibility with the evolving automotive landscape.
This paper details the design of a prototype misbehaviour response system, providing insights into its effectiveness in detecting misbehaviours and coordinating prompt responses. Our results show that the time required to generate navigation recommendations can be significantly reduced when we compare a general implementation with a real-time tailored one. It also addresses the limitations of the system and potential societal implications.
Furthermore, we outline future research directions for advancing the proposed approach, including integration with autonomous vehicle platooning and variable speed limit systems. Through these efforts, we aim to develop collaborative and context-aware response mechanisms in proactively suppressing risky driving behaviours and promoting personalized navigation solutions to improve road safety. Notably, when discussing misbehaviour events we note drowsiness, distracted, smoking, and on a cellphone for DMS states and wrong-way driving incidents in WWD service, which have been studied to be some of the major causes of accidents [
1,
2,
3].
The contributions of this work are summarized as follows:
We propose two novel vision-based driving misbehaviour detection systems, Driver Monitoring System (DMS) and Wrong Way Driving (WWD), to identify potential hazardous driving scenarios.
We utilize a vision-based Parking Lot Detector (PLD) system, which uses real-time video feeds from traffic cameras to identify nearby available parking locations.
As a response measure to driving misbehaviour scenarios, we propose a novel collaborative Misbehaviour Response System (MBR), which aggregates the alerts generated by DMS and WWD applications in real-time, and suggests a shortest route to the nearest parking location derived from the PLD system.
We leverage the infrastructure provided by the 5GMETA platform that utilizes high-bandwidth Ultra-Reliable Low Latency Communications (URLLC), to streamline rapid data exchanges within our MBR system in real-time.
We demonstrate the versatility and efficiency of the MBR system through experiments and findings. Additionally, we explore the potential benefits of integrating the MBR system with Electric Vehicles, which could significantly enhance overall road safety.
2. Related Work
2.1. Wrong Way Driving Detection
Roadside Units (RSUs) possess the capability to identify and acquire knowledge of the typical movement patterns exhibited by vehicles on the road. This enables them to detect anomalies, such as instances of wrong-way driving. Intelligent transportation systems (ITS) employ a variety of sensors and communication technologies to detect and alert drivers of potential wrong-way driving scenarios. These systems also facilitate real-time information exchange and generate navigation recommendations to guide wrong-way vehicles toward the nearest safe exit [
4,
5].
Connected vehicle technologies play a pivotal role in mitigating incidents of wrong-way driving. By establishing communication between vehicles and the surrounding infrastructure, these technologies enable the seamless transfer of critical information in real-time. This early detection of wrong-way driving situations allows for the provision of alternative routes or instructions to prevent vehicles from entering the incorrect lanes. Additionally, advanced mapping and positioning systems accurately ascertain a vehicle’s precise location, enabling timely warnings to drivers on the verge of entering the wrong lanes [
6,
7].
Furthermore, the integration of these technologies not only aids in the detection of wrong-way driving but also facilitates the dissemination of warnings to nearby vehicles, enabling them to adopt necessary precautions. By capitalizing on the collective intelligence of connected vehicles and infrastructure, a proactive approach can be adopted to mitigate the inherent risks associated with wrong-way driving, ultimately enhancing road safety for all motorists [
6].
2.2. Driver Monitoring for Risk Detection
Driver monitoring systems employ various sensors and cues to detect inappropriate driver behaviours, including distraction, drowsiness, and impairment [
8]. While these systems offer real-time detection of risky behaviours, they often lack mitigation responses. Recent academic research has explored the use of navigation recommendations to encourage drivers to adopt safer manoeuvres [
9]. However, these recommendations are not context-aware or personalized for specific behaviours and locations. Our proposed system aims to generate context-aware recommendations tailored to the detected misbehaviour and the vehicle’s location.
2.3. Parking Lot Detector
The existing research on parking detection methods can be divided into two main categories: sensor-based systems and computer vision-based systems. Sensor-based systems, like those discussed in [
10,
11,
12,
13,
14], use sensors such as ultrasonic or radar devices to monitor parking space occupancy. These systems are often deployed at entry and exit points of parking lots and provide real-time information to drivers regarding available spaces. However, they can be costly to implement, especially in larger outdoor parking areas.
On the other hand, computer vision-based methods, explored in [
15,
16,
17,
18], have gained prominence due to their versatility and practicality. These methods employ camera sensors to capture parking lot scenes and determine parking space occupancy. The research distinguishes between two approaches: space-driven and vehicle-driven methods. The former focuses on analysing specific regions of the scene, using features like colour vectors, to classify parking space occupancy. Initial attempts utilized techniques like hue histograms and support vector machines (SVMs). Recent advancements include using Convolutional Neural Networks (CNN) for classification [
19]. While space-driven methods offer accuracy, they require labour-intensive manual data labelling and calibration.
Notable datasets, such as PKLOT [
16] and more recent ones [
19,
20], provide resources for training and evaluating these vision-based systems. These datasets contain images of parking spaces captured from various angles and have been used to train classifiers achieving high accuracies.
The research also discusses the challenges of deploying computer vision-based systems in smart cities. In-vehicle Human Machine Interfaces (HMIs) are extended to incorporate 3D interactive graphics that enable drivers to navigate within a digital twin of the city. This application utilizes the proposed vision-based parking detection system to inform users about parking space availability in real-time.
2.4. Collaborative Response Systems
Research has indicated that collaborative systems leveraging data from interconnected vehicles and infrastructures have the potential to enhance safety and efficiency, a concept particularly relevant in the context of electric vehicles (EVs) [
21]. Recent studies have explored collaborative systems for anomaly detection and misbehaviour management in autonomous vehicles, where they identify and prevent inappropriate or malicious actions within the Internet of Vehicles (IoV) system [
22]. This is crucial for ensuring the system’s safety and reliability, especially as EVs become more integrated into transportation networks. Various techniques, including traditional machine learning algorithms, artificial neural networks, and deep learning, can be employed for misbehaviour detection, with potential applications in EV safety systems. These methods involve extracting features from transmitted vehicle messages, training detection models based on these features, and continuously updating the models with new data. However, limited research has focused on collaborative systems that generate context-aware navigation recommendations in response to detected misbehaviours, a crucial aspect for enhancing the safety of EV operations and the focus of the novel approach that we describe in this paper. The proposed system aims to address this gap by integrating data from multiple sources to provide personalized recommendations for effectively guiding misbehaving EVs to safety.
In summary, previous studies have primarily concentrated on misbehaviour detection and collaborative response systems, laying a foundation for the application of similar approaches in the context of EVs. However, to the best of our knowledge, there has been limited investigation into the real-time generation of context-aware navigation recommendations following detected misbehaviours, particularly tailored for EVs.
3. Design of the Collaborative Misbehaviour Response System
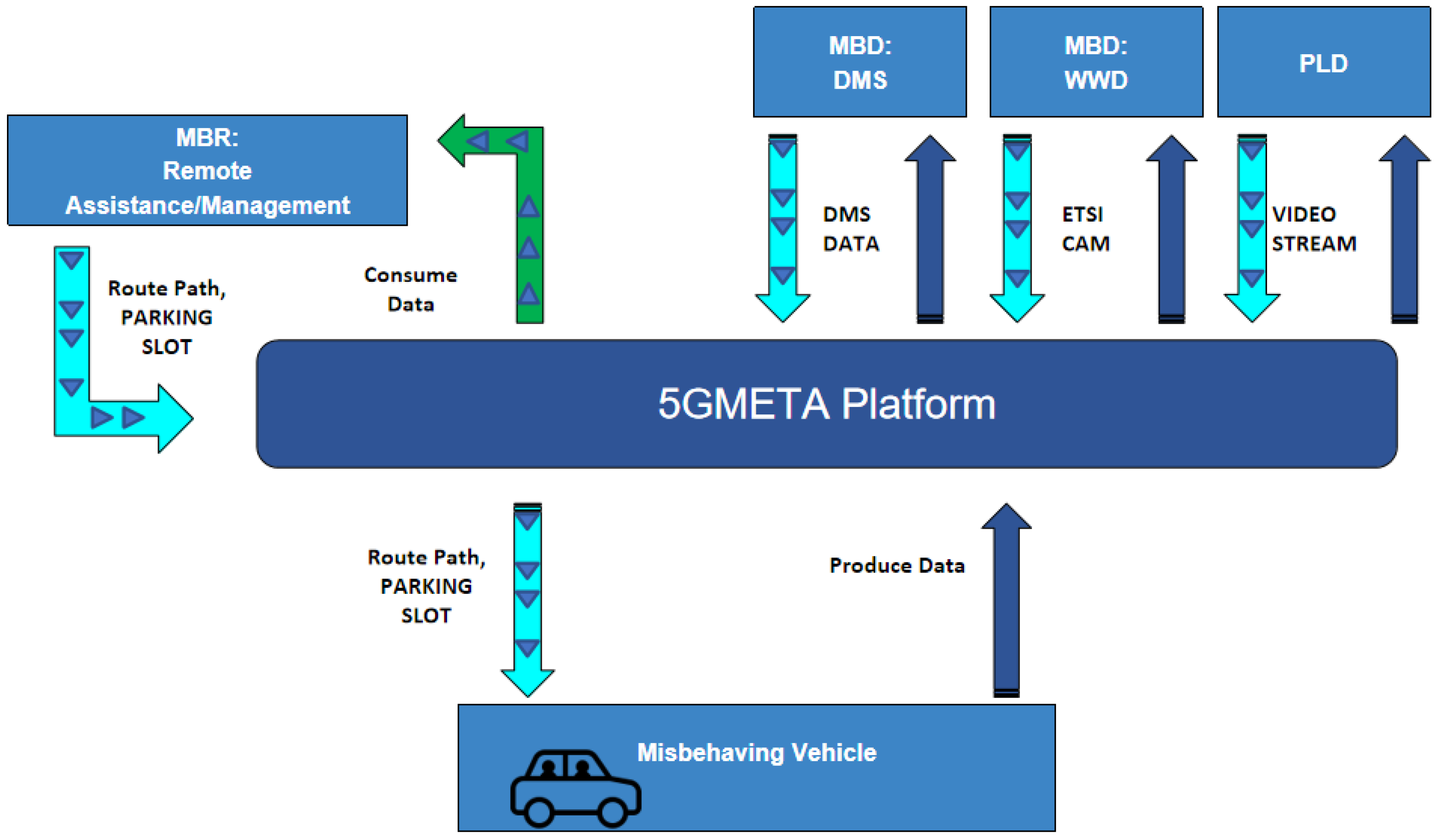
This research article introduces a solution called Misbehaviour Response (MBR), which is designed to handle real-time traffic incidents using Kafka and Avro. Our MBR system subscribes to a Kafka topic where Misbehaviour Detectors (MBDs) such as Wrong-Way Driving (WWD), the Driver Monitoring System (DMS), and Parking Lot Detection (PLD) services generate messages. These services operate on the 5GMETA platform as third-party applications, as illustrated in
Figure 1.
The 5GMETA project, an innovative initiative within the European Union, has developed an edge-cloud software platform that utilizes high-bandwidth Ultra-Reliable Low Latency Communications (URLLCs). This platform facilitates rapid and dependable data exchange, particularly beneficial for applications relying on heterogeneous data from various Internet of Things (IoT) sensors and devices deployed across different locations.
By leveraging the infrastructure provided by the 5GMETA Platform, our MBR system seamlessly accesses essential resources and services, ensuring efficient processing of real-time events. All the services discussed in this work, such as the PLD, WWD, DMS, and MBR, emphasize the sharing of only the metadata between system modules and the 5GMETA platform, thereby addressing privacy concerns. Furthermore, the 5GMETA platform offers the capability to anonymize sensitive data while receiving video streams.
Upon receiving a message, the MBR system extracts pertinent information from the event payload and devises optimized routes to the nearest available parking spot using a routing algorithm. The recommended path is then appended to the existing JSON object, and a new message is generated and published to a Kafka topic.
3.1. Wrong Way Driving Service
Lane Detection and Trajectory Clustering: Precise lane localization is necessary to identify accurately vehicles travelling in the incorrect direction. To improve accuracy, we imitate real-world road layouts by using a clustering algorithm to classify vehicle trajectories into different road lanes as a preliminary step. We make use of the YOLO model for detecting vehicles and implement the ByteTrack algorithm to monitor and track vehicles’ trajectories in each frame [
23,
24]. By eliminating the non-moving trajectories, we can ensure a dynamic and accurate identification of road lanes. This elimination process allows us to focus on trajectories that are pertinent to the detection of vehicles driving in the wrong way or the incorrect lane, without any interference from non-moving vehicles in the background scene. Furthermore, we employ the KMEANS algorithm to group vehicle trajectories based on direction, clustering similar moving paths. The model begins with a minimum of five trajectories and adapts dynamically to classify vehicles into their specific lanes, improving its ability to accommodate variations in traffic and lane configurations. This approach enhances our system’s adaptability to traffic flow changes and lane configurations, improving wrong-way driving detection accuracy and efficiency in real time.
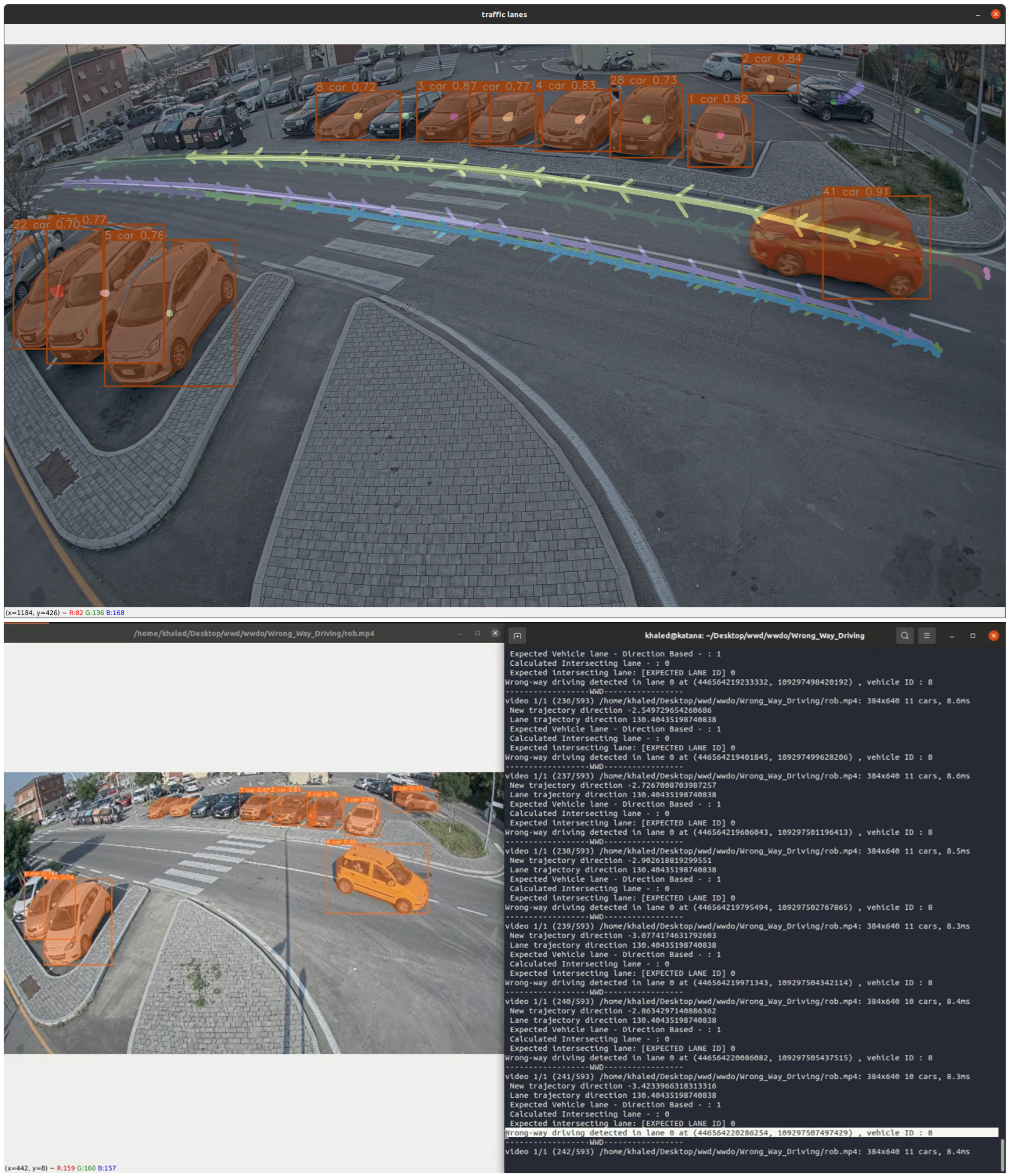
Geolocation Mapping and GPS-based Detection: Our proposed approach for detecting instances of wrong-way driving involves translating pixel trajectories into geolocation data for vehicles. This process is accomplished by estimating the homography between the traffic camera image and the geo-referenced satellite image using 10 key reference points. A homography, which acts as a transformation that aligns one image with another while preserving relative distances between points, effectively aligns the traffic camera image with the geo-referenced satellite image. Subsequently, a perspective transformation of the traffic camera image to the satellite image accurately maps vehicle pixel trajectories to specific geographical locations within our test area. To facilitate real-time retrieval of vehicle geographical coordinates, we make use of the Python GDAL library’s capabilities in geospatial data manipulation including coordinate system conversion and extraction of geographic information from images. This methodology allows for precise identification of wrong-way driving incidents based on GPS data, as depicted in
Figure 2.
Implementation and Integration: The combination of lane detection, trajectory clustering, and geolocation mapping improves the strength and efficiency of our system for detecting wrong-way driving. This integrated approach enables us to create a thorough solution that can accurately detect and pinpoint vehicles travelling in the opposite direction of traffic flow as depicted in Algorithm 1 and
Figure 2.
| Algorithm 1 Check Wrong-Way Driving GPS |
| Require: , |
| Ensure: , |
- 1:
Polygon(Point(pos) for (key, pos) in ) - 2:
for all in do - 3:
for all in do - 4:
if then - 5:
continue - 6:
end if - 7:
Polygon(Point(pos) for pos in ) - 8:
if intersects then - 9:
calc_direction(, ) - 10:
calc_direction(, ) - 11:
if then - 12:
return True, - 13:
end if - 14:
end if - 15:
end for - 16:
end for - 17:
return False, None
|
By implementing this specific approach, our proposed solution can accurately and effectively detect instances of vehicles moving in the wrong direction based on GPS data. This methodology allows our suggested solution to dynamically adjust to changes in traffic flow and lane configurations, resulting in an overall improvement in accuracy and efficiency when identifying incidents of wrong-way driving. The addition of this functionality is a critical component of our proposed strategy for the MBR and shows promise for various transportation safety applications. It also offers potential advantages such as preventing accidents and enhancing overall road safety measures by proactively addressing wrong-way driving incidents.
3.2. Driver Monitoring System Service
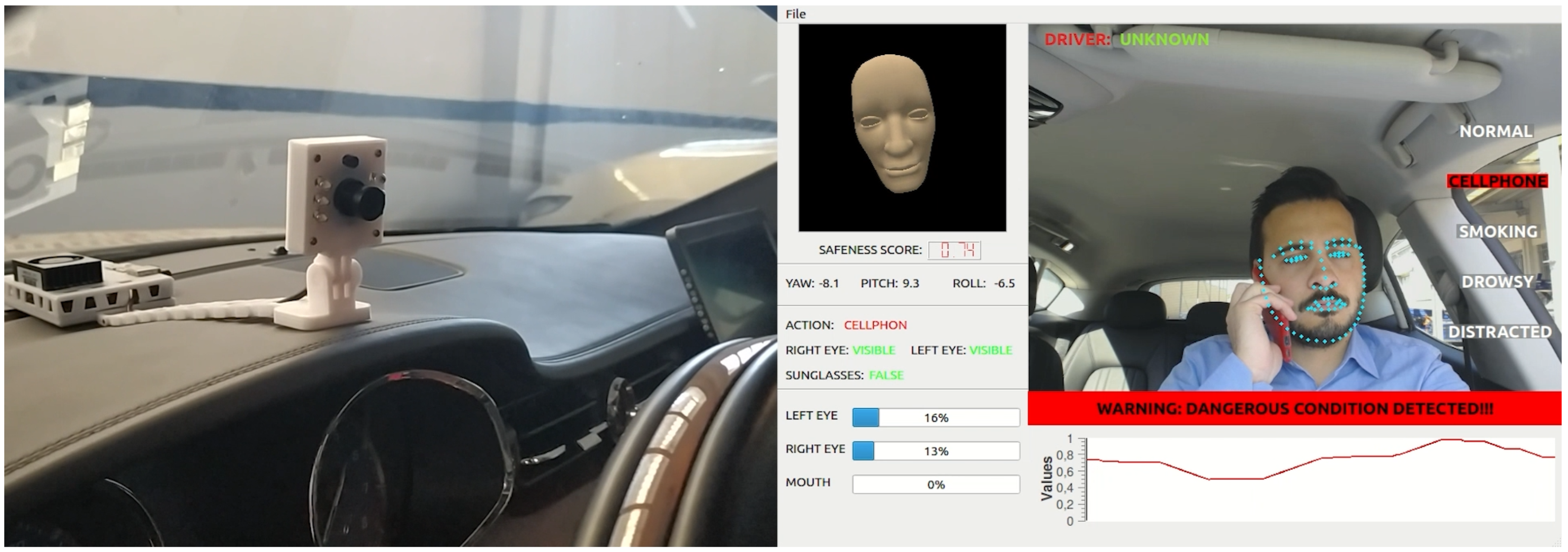
The Driver Monitoring System (DMS) is a state-of-the-art software module that utilizes Deep Neural Network (DNN) technology to recognize and classify the status of the driver in real-time. The system is designed to assess whether the driver is in normal condition or if there are anomalies, such as being drowsy, distracted, speaking on the cell phone, or smoking, in order to prevent accidents caused by driver fatigue or distraction.
The DMS consists of three main components, each of which plays a critical role in the overall performance of the system:
Face Detector: The Face Detector is a lightweight face detection algorithm that operates on a single frame of size 320 × 240, based on Ultra-Light-Fast-Generic Face-Detector-1MB. The Face Detector first locates the face region within the image and then refines the bounding box to fit the face better. The Face Detector is optimized for real-time performance, and can accurately detect faces even in challenging lighting conditions or when the driver is wearing glasses or a hat.
Face Recognition module: The Face Recognition module is responsible for recognizing the driver’s face and extracting the region of the face with a size of 160 × 160. This component is based on MobileFaceNet implemented in Pytorch, a state-of-the-art face recognition algorithm that achieves high accuracy with a small number of parameters. The Face Recognition module first aligns the face region using facial landmarks and then extracts a feature vector that represents the driver’s identity. The Face Recognition module operates on every set of frames to ensure that the correct driver is being monitored and that the facial features used for analysis are accurate and up-to-date. The Face Recognition module is capable of recognizing faces even when the driver is wearing glasses or has changed their appearance and can extract facial features that are necessary for DMS analysis.
DMS Model: The DMS Model is the core component of the system, and operates on the region of the face extracted by the Face Recognition module. The DMS Model is based on Deep Neural Networks and extracts facial landmarks, eye and mouth opening, head pose, and driver’s action, such as normal, on a cellphone, or smoking. The DMS Model incorporates a state machine that aggregates these features to have an output of Drowsy, Yawning, Distracted (Pose), Cellphone, or Smoke. The DMS Model is trained on a large dataset of annotated driver images and is optimized for high accuracy and real-time performance.
The DMS operates in a continuous loop, processing each frame of the video stream in real-time. First, the Face Detector locates the face region within the image. Then, the Face Recognition module aligns the face region and extracts the feature vectors that represent the identity of the driver. The DMS Model then analyses the facial landmarks, eye and mouth opening, head pose, and driver’s action, and determines the status of the driver as shown in
Figure 3.
Overall, the DMS is a powerful tool that can significantly improve driver safety and reduce the risk of accidents caused by driver fatigue or distraction. The combination of the Face Detector, Face Recognition module, and the DMS model enables the system to accurately detect and classify the driver’s status in real time, and further share these data to the 5GMETA Platform.
3.3. Parking Lot Detector Service
As one of the responses to the driving misbehaviour situations, we propose to provide the nearest available parking space to the misbehaving vehicle in real-time. To achieve this, we rely on the parking spaces provided by the Parking Lot Detector Service. The PLD is a vision-based system that utilizes smart-city infrastructure cameras to identify potential parking spaces and their current occupancy status by leveraging deep-learning and computer-vision techniques. The PLD provides a feasible and convenient solution for scaling the application across multiple city cameras as it involves higher re-utilization of available hardware resources thereby reducing the associated overhead costs.
The PLD consists of three main components as follows:
Parking Detection Pipeline: In this stage, the objective is to reliably detect and track all the vehicles observed in the scene. As an input to this stage, live RTSP video streams coming from the infrastructure cameras are fed as an input. The PLD uses the YOLOv5 model [
25,
26] trained on the MS-COCO dataset for the object detection task. To accurately track vehicles, the PLD uses the DeepSORT algorithm introduced by Wojke et al. [
27] which provides better performance over occluded objects as it uses a cascading association step using CNN-based object appearance features. Using the combination of these two algorithms, bounding boxes (pixels) of the vehicles along with their tracking results are obtained.
Furthermore, the PLD uses a novel Static Object Detection (SOD) algorithm built on top of the object detection and tracking results to determine whether the detected vehicle is stationary or moving in the scene. First, the SOD maintains a list of all the tracked objects and adapts them according to the changes in the observed scene. Then, it checks the corresponding image coordinates and associated velocities of every tracked object for a certain time duration to determine whether the object is stationary. All the stationary objects (in this case, the vehicles) are considered potential parking spaces. Image coordinates of these objects including their unique identification number are stored locally, which further acts as a database of parking spots for a given camera.
Occupancy Classification: This stage aims to provide the real-time occupancy status (free/occupied) of a given parking space from the parking database. To achieve this, the PLD uses a Pytorch implementation of an image classifier by Amato et al. [
19], trained on the CNRPark-EXT dataset which consists of roughly 150,000 labelled images of vacant and occupied parking spaces, built on a parking lot of 164 spaces. Parking space is retrieved from the database, and then using the acquired bounding box an image crop on a shared copy of the original input image frame is taken. This image crop then acts as an input to the classifier during inference which provides real-time occupancy status prediction of the parking space.
Data Transmission: To keep the data transmission volume to a minimum, the PLD calculates the centroid of each parking space in the database, therefore, reducing the number of associated data points. Then, the geo-location of these centroids is calculated manually by estimating the homography between the traffic camera image and the geo-referenced satellite image of our test area, with 10 image points. Using this homography matrix, a perspective transformation of the traffic camera image to the satellite image is achieved. Respective geographical coordinates of the parking space are then retrieved using the Python GDAL library. All the aforementioned processed data is encapsulated in a JSON message which contains: Traffic camera details (id and GPS coordinates) and Parking Space Information (every space with its unique IDs, GPS position, and their respective occupancy status). This data is then transmitted utilizing the high-bandwidth network infrastructure provided by 5GMETA and is made available in the 5GMETA cloud platform to all potential data consumers.
Figure 4 showcases the efficient parking space detection of the PLD through a visually informative representation. In the top section, the real-world scenario is projected, demonstrating the capability of the PLD to accurately identify and track potential parking spaces. The detected parking spaces are visually marked with green icons, indicating available spaces, and red icons, representing occupied spaces, as shown in the bottom section.
3.4. Collaborative Misbehaviour Response
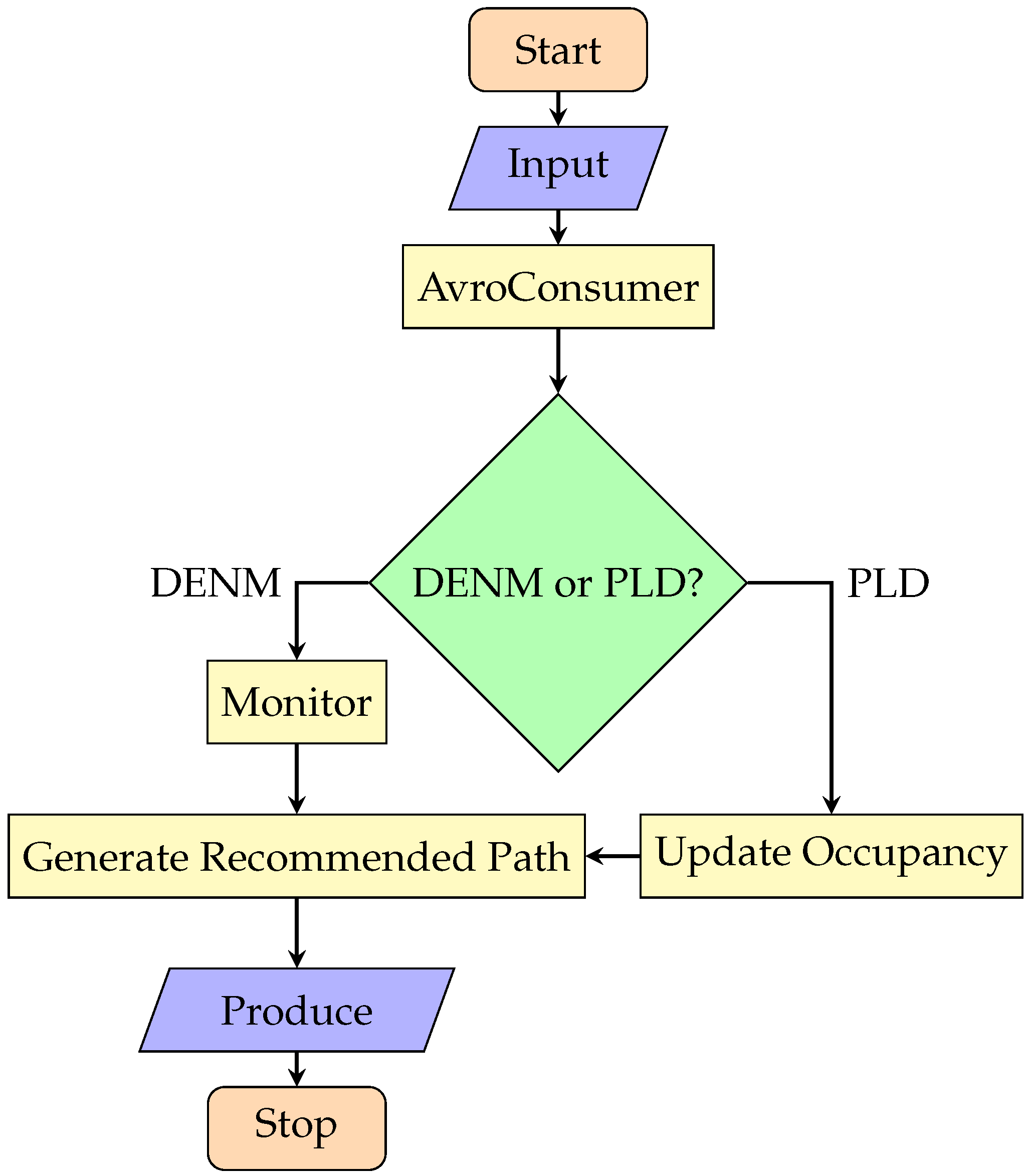
To implement the misbehaviour response solution, the MBR uses the AvroConsumer library to subscribe to the Kafka topic and consume messages in Avro format. The Keycloak library is used to authenticate with a Keycloak server, which provides secure access to the Kafka cluster. The proton library is used to encode and decode QPID proton messages. The main function of MBR takes four input parameters: kafka topic, platform address, bootstrap port, and schema registry port. These parameters are used to configure the AvroConsumer object that subscribes to the Kafka topic where the WWD, DMS, and PLD services produce their messages. When a message is received, the MBR checks the message content to determine if it contains a DENM (Decentralized Environmental Notification Message) or a PLD (Parking Lot Data) payload. If the message contains a DENM payload and the cause code indicates a specific event, such as a wrong-way driving incident (WWD, cause code 14) or a driving monitoring system event (DMS, cause code 93), MBR generates a route to the nearest available parking spot and produces a new message to a Kafka topic with the recommended path. If the message contains a PLD payload, the MBR extracts the available parking spaces and stores them in a list, while the occupancy status is updated every 10 s on a new message coming from the PLD service. If a DENM message is received with a corresponding WWD or DMS cause code, MBR monitors these events continuously. In the case of WWD, the events are monitored from CCTV footage, while in the case of the DMS, the events are monitored from the camera mounted inside the vehicle. The Collaborative MBR efficiently generates optimized routes from the detected event position to the nearest available parking space by seamlessly integrating the high-performance OpenStreetMap OSRM Engine. Operating as a separate service, the OSRM Engine utilizes OpenStreetMap data to calculate the most efficient routes. When a misbehaviour event is detected, the MBR system promptly initiates the route generation process. It collects the event position coordinates and coordinates of available parking spaces from the Parking Lot Detector service. Subsequently, the MBR sends a request to the OSRM API, providing the source (event position) and destination (nearest available parking space) coordinates. The OSRM Engine leverages the comprehensive road data and traffic conditions from OpenStreetMap to calculate the optimized route. The result is then delivered in the form of waypoints and turn-by-turn instructions, enabling drivers to swiftly navigate to the recommended parking spot. The MBR system receives the optimized route from the OSRM Engine. It adds the route information to the existing JSON object containing the misbehaviour event details. This updated JSON object is then used to produce a new message to a Kafka topic, which is shared with the drivers or relevant stakeholders.
Figure 5 showcases the process of the MBR journey.
Overall, the MBR provides an efficient solution for real-time processing and response to WWD and DMS traffic events by generating optimized routes to the nearest available parking spot. The MBR is integrated with the 5GMETA platform, which facilitates the seamless communication and coordination between WWD, DMS, and PLD services. Additionally, the MBR provides continuous updates of the occupancy status of detected parking spots every 10 s by receiving messages from the PLD service. This integration of services enhances the efficiency and accuracy of traffic management systems, resulting in improved safety and convenience for drivers.
4. MBR and Electrical Vehicles
By combining the Misbehaviour Response System with Electric Vehicles, a range of advantages can be realized, particularly in the areas of energy efficiency optimization and leveraging the advanced capabilities of the vehicles:
Optimization of Energy Efficiency: Integrating the MBR with EVs offers a significant advantage in the optimization of energy consumption. The MBR systems can make use of real-time data and predictive analytics to optimize driving routes and behaviour, thereby reducing energy usage without compromising safety. For example, by utilizing the vehicle’s braking and acceleration systems, the MBR can implement regenerative braking strategies and smooth acceleration patterns, maximizing energy recovery and extending the vehicle’s driving range. In contrast to traditional vehicles that require manual intervention to optimize energy efficiency, EVs equipped with MBR systems can dynamically adjust driving parameters based on real-time traffic conditions, terrain, and energy availability. This adaptive approach ensures that EVs operate at peak efficiency, reducing overall energy consumption and carbon emissions.
Enhanced Control and Monitoring: Another benefit of connecting the MBR with EVs is the enhanced control and monitoring capabilities enabled by the vehicle’s electric drivetrain. Unlike traditional vehicles that rely on mechanical systems, EVs offer finer control over braking and acceleration, allowing MBR systems to implement precise interventions in response to detected misbehaviour or safety threats. For instance, MBR-equipped EVs can autonomously adjust braking force or throttle input to mitigate potential accidents or dangerous driving behaviour, such as sudden lane changes or aggressive acceleration. This proactive approach enhances overall road safety and reduces the likelihood of collisions, benefiting both EV occupants and other road users. Moreover, the modules within the MBR, including the Driving Monitoring System (DMS), are designed as edge models that require minimal power to operate. These energy-efficient components operate at 12 V, allowing for seamless integration with EVs’ onboard systems without causing a noticeable impact on battery life or vehicle performance. By leveraging the inherent benefits of EV technology and incorporating them into MBR functionalities, vehicles can attain increased levels of energy efficiency, safety, and performance, thereby contributing to a more sustainable and intelligent transportation environment.
5. Results & Evaluation
In this section, we present the setup with results and evaluation of the Collaborative Misbehaviour Response System, including the deployment in two different levels with latency measurements.
The Collaborative MBR is composed of several key components, as summarized in
Table 1. At its core, the MBR system serves as the real-time traffic event processing engine, receiving inputs from Misbehaviour Detectors (WWD, DMS) alongside the PLD service, which operates on top of the 5GMETA Platform. The Misbehaviour Detectors are responsible for detecting misbehaviour events such as wrong-way driving incidents, driver monitoring, and parking lot information, providing valuable data to the MBR for response generation. The 5GMETA Platform acts as the infrastructure for the MBR, providing access to the necessary resources and services required for efficient event processing. To generate optimized routes for response, the MBR system integrates the high-performance OpenStreetMap OSRM Engine, which calculates the most efficient routes based on OpenStreetMap data and traffic conditions. This integrated approach enables the MBR to promptly respond to misbehaviour events and provide real-time recommendations to drivers, ultimately contributing to improved road safety and traffic management.
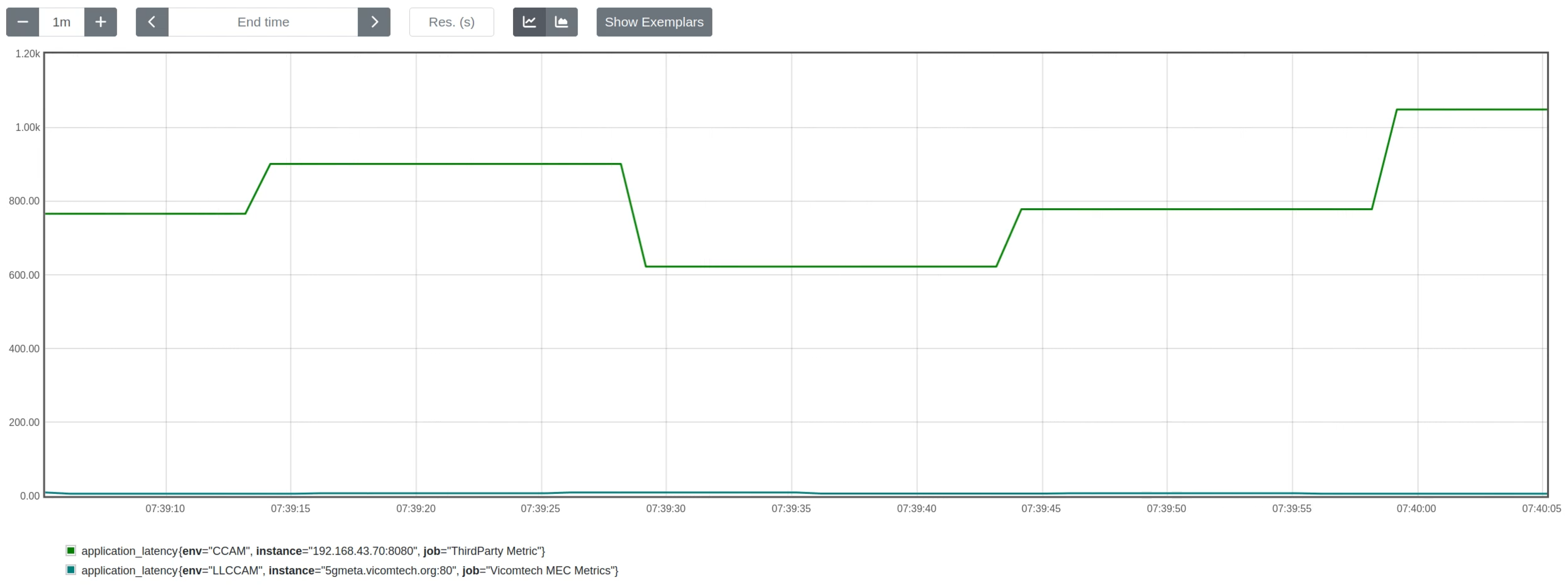
The MBR can be deployed in two different setups achieving good latency results as demonstrated in
Figure 6:
(i) Deployed on top of the 5GMETA Platform as a third-party application: In this configuration, the MBR utilizes the infrastructure and resources provided by the 5GMETA Platform to process real-time traffic events and communicate with the OSRM Engine. The maximum latency observed in this deployment is approximately 1.2 s, suitable for non-critical applications.
(ii) Deployed on 5GMETA MEC (Multi-Access Edge Computing) for low latency: In this low latency deployment, the MBR is hosted closer to the edge of the network, reducing the latency between the MBR and other components. The measured latency from the moment the event was captured to the vehicle receiving the recommended route is stable at approximately 40 ms, ensuring near-instantaneous responses in critical situations.
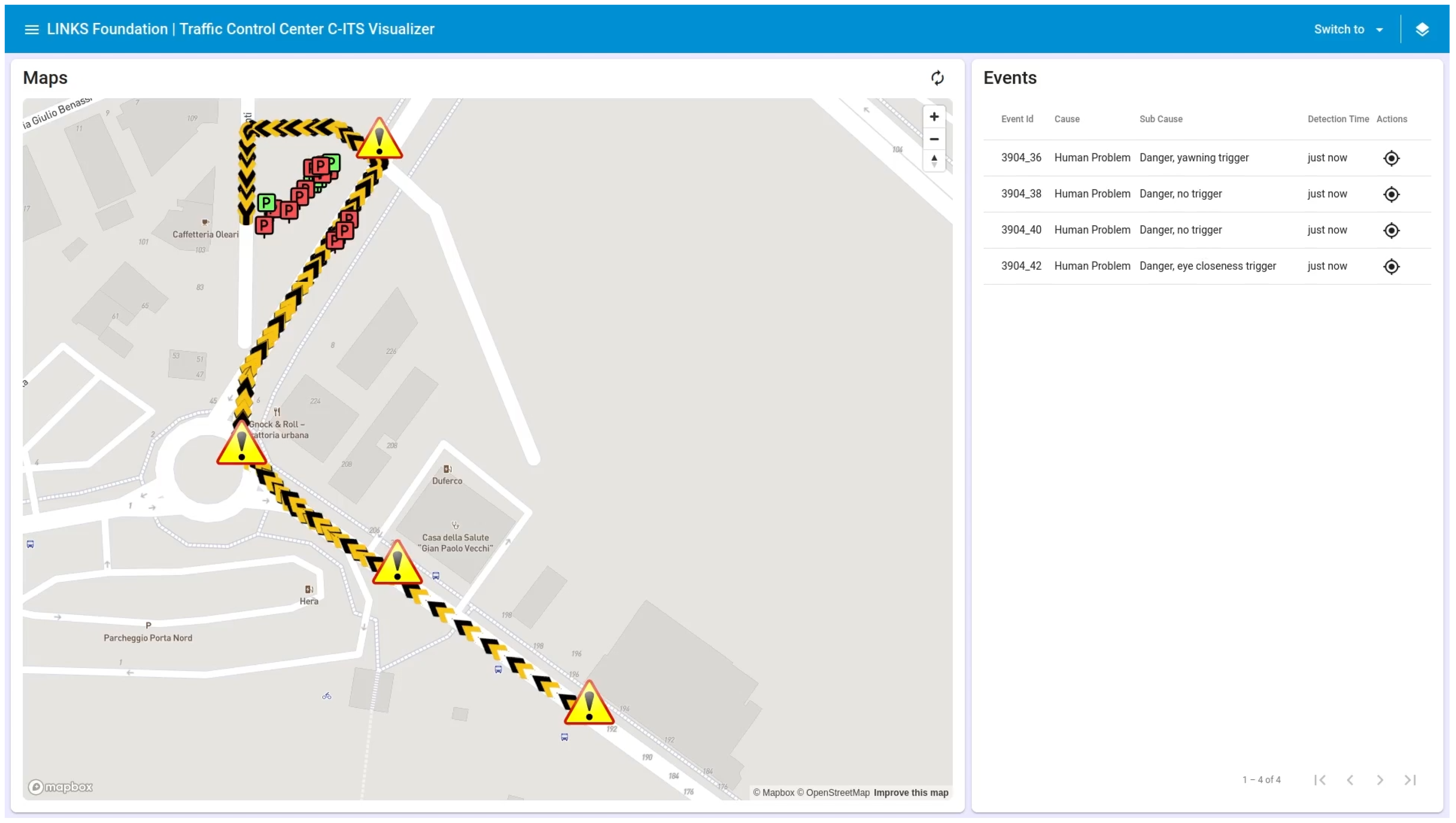
Additionally, the MBR goes beyond providing responses solely to the misbehaving vehicle; it also ensures collaborative sharing of responses with the Multi-Access Edge Computing (MEC) handling the specific geographic area. This approach enables the MBR to make its response accessible to other vehicles within the same MEC domain. By sharing response information with the MEC, the MBR contributes to a dynamic and interconnected traffic management ecosystem, where valuable insights and timely solutions can be shared among multiple vehicles operating in the same vicinity. This collaborative sharing fosters a cooperative environment, enhancing overall traffic efficiency, safety, and coordination. Other vehicles handled by the MEC can benefit from the MBR’s optimized routing to the nearest available parking space, enabling them to make informed decisions and efficiently navigate through congested areas or potentially hazardous situations. Consequently, the MBR’s ability to share responses with the MEC extends the benefits of its real-time misbehaviour response system to a broader network of vehicles, fostering a more intelligent and cooperative transportation ecosystem. The results of the MBR System are showcased in
Figure 7.
6. Discussion
In this section, we discuss the implications and insights drawn from the experiments conducted, particularly within the context of Electric Vehicles, limitations, as well as potential avenues for future research.
6.1. Summary of Experiments
The study included implementing the Collaborative Misbehaviour Response system in conjunction with a Parking Lot Detector and a Driving Monitoring System. This comprehensive testing setup aimed to simulate genuine real-world scenarios where MBR interacts with various misbehaviour detection systems to respond effectively to traffic events specific to EV environments. The results demonstrate the system’s efficiency in processing real-time traffic events and generating optimized routes to the nearest available parking space or safe location, emphasizing energy efficiency and utilizing the advanced capabilities of EVs. Notably, the low-latency MEC deployment exhibited almost instantaneous response times, emphasizing the significance of infrastructure proximity in enhancing system performance.
6.2. System Performance and Latency
The MBR system’s effectiveness, as indicated by latency measurements across various deployment scenarios, highlights its ability to provide prompt responses to instances of misbehaviour. The comparison between deployment on the 5GMETA Platform and 5GMETA MEC highlights the significance of edge computing in reducing latency for critical applications. By leveraging edge computing resources, the MBR achieves near-instantaneous response times, crucial for ensuring the safety of drivers and passengers in potentially hazardous situations.
6.3. Implementation Costs
The cost-effectiveness of employing multiple MECs in hosting the 5GMETA platform presents a strategic advantage over self-dedicated data collection methods.
While the cost of hosting the 5GMETA platform grows with the number of MECs, this approach becomes more economically favourable when compared to the linear escalation of expenses associated with dedicated self-data collection, particularly as the number of hardware devices, such as cameras, increases.
The efficiency gained through utilizing multiple MECs for broader geographical coverage contributes to optimizing data collection costs, making it a superior choice compared to the self-dedicated collection method. This makes it a preferable option compared to self-dedicated collection methods, emphasizing the benefits of the 5GMETA platform in scenarios where extensive spatial reach and scalability are crucial factors to consider.
Importantly, the calculated cost savings percentages (reported in [
28]) are always over 99%, further emphasizing the substantial financial benefits and efficiency gains associated with the 5GMETA platform, solidifying its position as a better choice for organizations aiming to enhance data collection while realizing significant cost savings.
6.4. Current Approach Limitations
The Driver Monitoring System faces limitations in challenging lighting conditions like high glare, which can compromise the performance of the Face Recognition module due to shadows and reflections. To address this, future efforts will transition to video-based DMS for improved adaptability to varying lighting conditions. Similarly, the real-time Wrong-Way Driving detection approach, while effective, encounters challenges in heavy traffic and lane changes, impacting algorithm accuracy. Additionally, variations in weather and lighting conditions can affect system reliability. Future work aims to enhance the algorithm’s robustness under diverse conditions, ensuring improved performance in detecting wrong-way driving incidents. Despite these limitations, both systems show promise, requiring further refinement to enhance accuracy and effectiveness in real-world scenarios.
6.5. Future Work
Further optimization of latency, particularly in scenarios where milliseconds can make a difference, remains an area of interest. Methods such as predictive analytics and edge caching could be explored to allocate resources and minimize response times even further pre-emptively. Furthermore, there is a need to scale up the deployment of misbehaviour detection systems, such as the PLD and WWD, to cover all city cameras. This expansion would provide comprehensive coverage of traffic incidents and misbehaviours across urban areas, allowing for more effective monitoring and response mechanisms. Additionally, integrating these systems with existing infrastructure and networks would facilitate seamless data sharing and collaboration between different stakeholders involved in traffic management and EV operation.
7. Conclusions
In conclusion, the integration of the Misbehaviour Response System with Electric Vehicles represents a significant advancement in road safety and efficiency. By combining the proactive capabilities of MBR with the energy-efficient and advanced features of EVs, we can mitigate risky driving behaviours, optimize energy consumption, and enhance overall road safety.
As we move towards a future of smart and sustainable transportation, the collaboration between the MBR and EVs showcases the potential of innovative technologies to address complex challenges. This synergy not only improves the safety of EV occupants and other road users but also contributes to the broader goals of reducing carbon emissions and promoting sustainable mobility. To further explore the capabilities and benefits of MBR and EV integration, we encourage you to watch our demonstration video on YouTube:
https://youtu.be/lEmmjXTNAQs (accessed on 1 March 2024).
Author Contributions
Conceptualization, K.C., C.S.S. and R.C.; methodology, K.C., C.S.S. and R.C.; software, K.C. and C.S.S.; validation, K.C., C.S.S. and R.C.; formal analysis, R.C.; investigation, K.C., C.S.S. and R.C.; resources, R.C.; data curation, K.C., C.S.S. and R.C.; writing—original draft preparation, K.C. and C.S.S.; writing—review and editing, K.C., C.S.S. and R.C.; visualization, K.C. and C.S.S.; supervision, R.C.; project administration, R.C.; funding acquisition, R.C. All authors have read and agreed to the published version of the manuscript.
Funding
This work is a part of the 5GMETA project. This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 957360. Content reflects only the authors’ view and European Commission is not responsible for any use that may be made of the information it contains.
Data Availability Statement
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Albadawi, Y.; Takruri, M.; Awad, M. A review of recent developments in driver drowsiness detection systems. Sensors 2022, 22, 2069. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.; Zhao, J.; Pour-Rouholamin, M.; Tobias, P.A. Statistical characteristics of wrong-way driving crashes on Illinois freeways. Traffic Inj. Prev. 2015, 16, 760–767. [Google Scholar] [CrossRef] [PubMed]
- Koay, H.V.; Chuah, J.H.; Chow, C.O.; Chang, Y.L. Detecting and recognizing driver distraction through various data modality using machine learning: A review, recent advances, simplified framework and open challenges (2014–2021). Eng. Appl. Artif. Intell. 2022, 115, 105309. [Google Scholar] [CrossRef]
- Simpson, S.; Bruggeman, D. Detection and Warning Systems for Wrong-Way Driving; Technical Report; Arizona Department of Transportation: Phoenix, AZ, USA, 2015. [Google Scholar]
- Cooner, S.A.; Ranft, S.E. Wrong-Way Driving on Freeways: Problems, Issues, and Countermeasures; Technical Report; Transportation Research Board: Washington, DC, USA, 2008. [Google Scholar]
- Dokur, O.; Katkoori, S. Vehicle-to-Infrastructure based Algorithms for Traffic Light Detection, Red Light Violation, and Wrong-Way Entry Applications. In Proceedings of the 2022 IEEE International Symposium on Smart Electronic Systems (iSES), Warangal, India, 18–22 December 2022; pp. 25–30. [Google Scholar] [CrossRef]
- Xiao, Z.; Yang, D.; Wen, F.; Jiang, K. A unified multiple-target positioning framework for intelligent connected vehicles. Sensors 2019, 19, 1967. [Google Scholar] [CrossRef] [PubMed]
- Kuo, J.; Lenné, M.G.; Mulhall, M.; Sletten, T.; Anderson, C.; Howard, M.; Rajaratnam, S.; Magee, M.; Collins, A. Continuous monitoring of visual distraction and drowsiness in shift-workers during naturalistic driving. Saf. Sci. 2019, 119, 112–116. [Google Scholar] [CrossRef]
- Teng, L.; Tian, J.; Izumi, T. A Proposal of Dynamic Route Search Method to Consider the Individual Driver Preferences. In Proceedings of the 2019 IEEE Symposium Series on Computational Intelligence (SSCI), Xiamen, China, 6–9 December 2019; pp. 1226–1232. [Google Scholar]
- Al-Turjman, F.; Malekloo, A. Smart parking in IoT-enabled cities: A survey. Sustain. Cities Soc. 2019, 49, 101608. [Google Scholar] [CrossRef]
- Lin, T.; Rivano, H.; Le Mouël, F. A survey of smart parking solutions. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3229–3253. [Google Scholar] [CrossRef]
- Lou, L.; Zhang, J.; Xiong, Y.; Jin, Y. An improved roadside parking space occupancy detection method based on magnetic sensors and wireless signal strength. Sensors 2019, 19, 2348. [Google Scholar] [CrossRef] [PubMed]
- Zhu, H.; Yu, F. A vehicle parking detection method based on correlation of magnetic signals. Int. J. Distrib. Sens. Netw. 2015, 11, 361242. [Google Scholar] [CrossRef]
- Chunhe, Y.; Jilin, L. A type of sensor to detect occupancy of vehicle berth in carpark. In Proceedings of the 7th International Conference on Signal Processing, ICSP’04, Beijing, China, 31 August–4 September 2004; Volume 3, pp. 2708–2711. [Google Scholar]
- Cai, B.Y.; Alvarez, R.; Sit, M.; Duarte, F.; Ratti, C. Deep learning-based video system for accurate and real-time parking measurement. IEEE Internet Things J. 2019, 6, 7693–7701. [Google Scholar] [CrossRef]
- De Almeida, P.R.; Oliveira, L.S.; Britto, A.S., Jr.; Silva, E.J., Jr.; Koerich, A.L. PKLot—A robust dataset for parking lot classification. Expert Syst. Appl. 2015, 42, 4937–4949. [Google Scholar] [CrossRef]
- Huang, C.C.; Wang, S.J. A hierarchical bayesian generation framework for vacant parking space detection. IEEE Trans. Circuits Syst. Video Technol. 2010, 20, 1770–1785. [Google Scholar] [CrossRef]
- Dan, N. Parking Management System and Method. U.S. Patent App. 10/066,215, 31 July 2003. [Google Scholar]
- Amato, G.; Carrara, F.; Falchi, F.; Gennaro, C.; Meghini, C.; Vairo, C. Deep learning for decentralized parking lot occupancy detection. Expert Syst. Appl. 2017, 72, 327–334. [Google Scholar] [CrossRef]
- Marek, M. Image-Based Parking Space Occupancy Classification: Dataset and Baseline. arXiv 2021, arXiv:2107.12207. [Google Scholar]
- Van der Heijden, R.W.; Dietzel, S.; Leinmüller, T.; Kargl, F. Survey on misbehaviour detection in cooperative intelligent transportation systems. IEEE Commun. Surv. Tutor. 2018, 21, 779–811. [Google Scholar] [CrossRef]
- Wang, X.; Zhu, Y.; Han, S.; Yang, L.; Gu, H.; Wang, F.Y. Fast and progressive misbehaviour detection in internet of vehicles based on broad learning and incremental learning systems. IEEE Internet Things J. 2021, 9, 4788–4798. [Google Scholar] [CrossRef]
- Fang, W.; Wang, L.; Ren, P. Tinier-YOLO: A real-time object detection method for constrained environments. IEEE Access 2019, 8, 1935–1944. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, P.; Jiang, Y.; Yu, D.; Weng, F.; Yuan, Z.; Luo, P.; Liu, W.; Wang, X. Bytetrack: Multi-object tracking by associating every detection box. In Computer Vision–ECCV 2022: Proceedings of the 17th European Conference, Tel Aviv, Israel, 23–27 October 2022; Proceedings, Part XXII; Springer: Berlin/Heidelberg, Germany, 2022; pp. 1–21. [Google Scholar]
- Ultralytics. YOLOv5 SOTA Realtime Instance Segmentation. Available online: https://github.com/ultralytics/yolov5 (accessed on 1 March 2024).
- Broström, M. Real-Time Multi-Object Tracker Using YOLOv5 and Deep Sort. 2020. Available online: https://github.com/mikel-brostrom/Yolov5_DeepSort_Pytorch (accessed on 1 March 2024).
- Wojke, N.; Bewley, A.; Paulus, D. Simple online and realtime tracking with a deep association metric. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 3645–3649. [Google Scholar]
- Juana, B.; Oscar, C.; Gorka, V.; Pierre, M.; Edoardo, B.; Rizzi, G.; Roberto, C.; Daniele, B.; Guido, G.; Khaled, C. 5GMETA Innovation Services and Platform Validation. 2024. Available online: https://5gmeta-project.eu/library/ (accessed on 1 March 2024).
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}