
Research on an Intelligent Vehicle Trajectory Tracking Method Based on Optimal Control Theory


Abstract
:1. Introduction
2. Vehicle Dynamics Modeling and Discretization
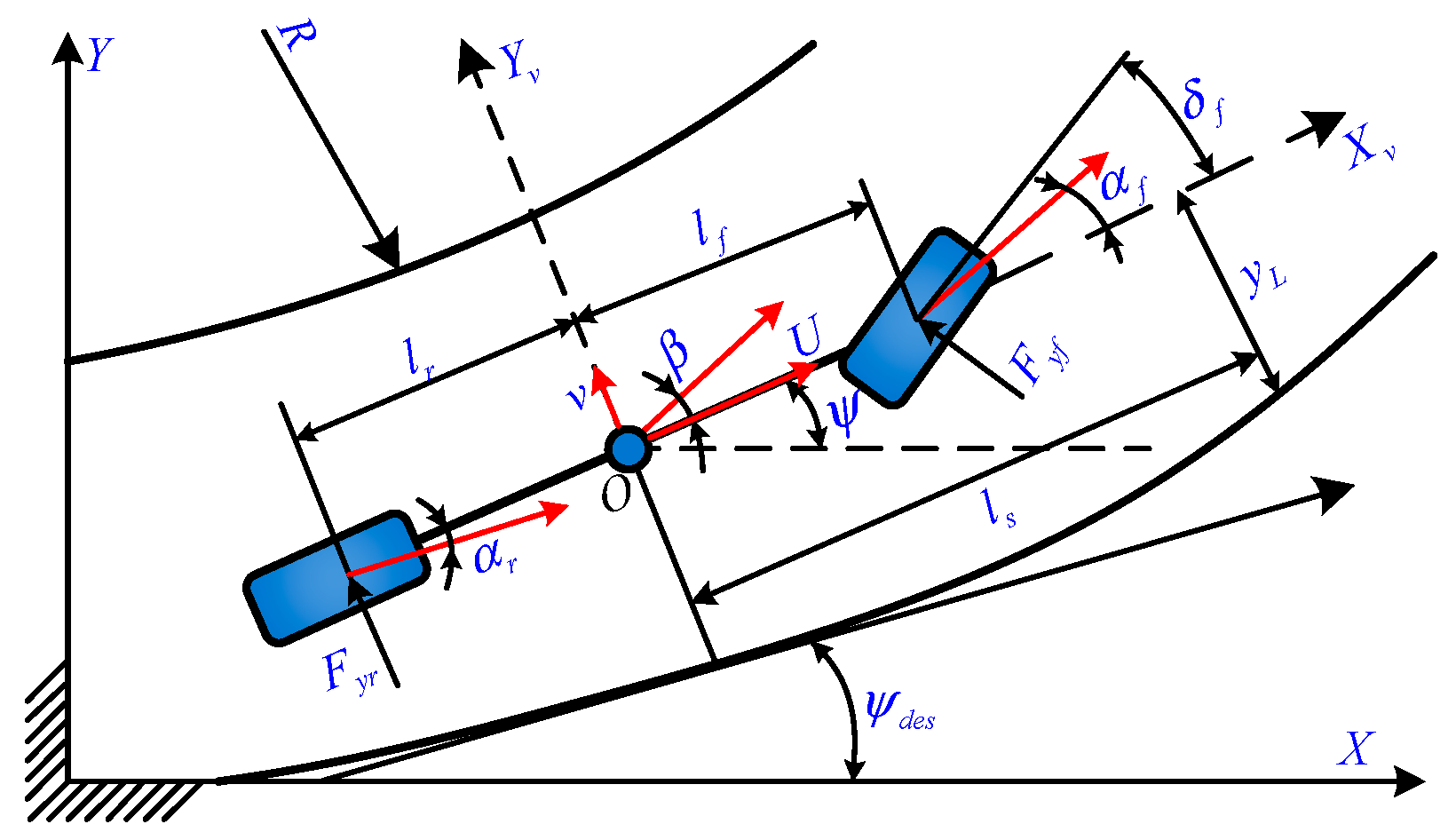
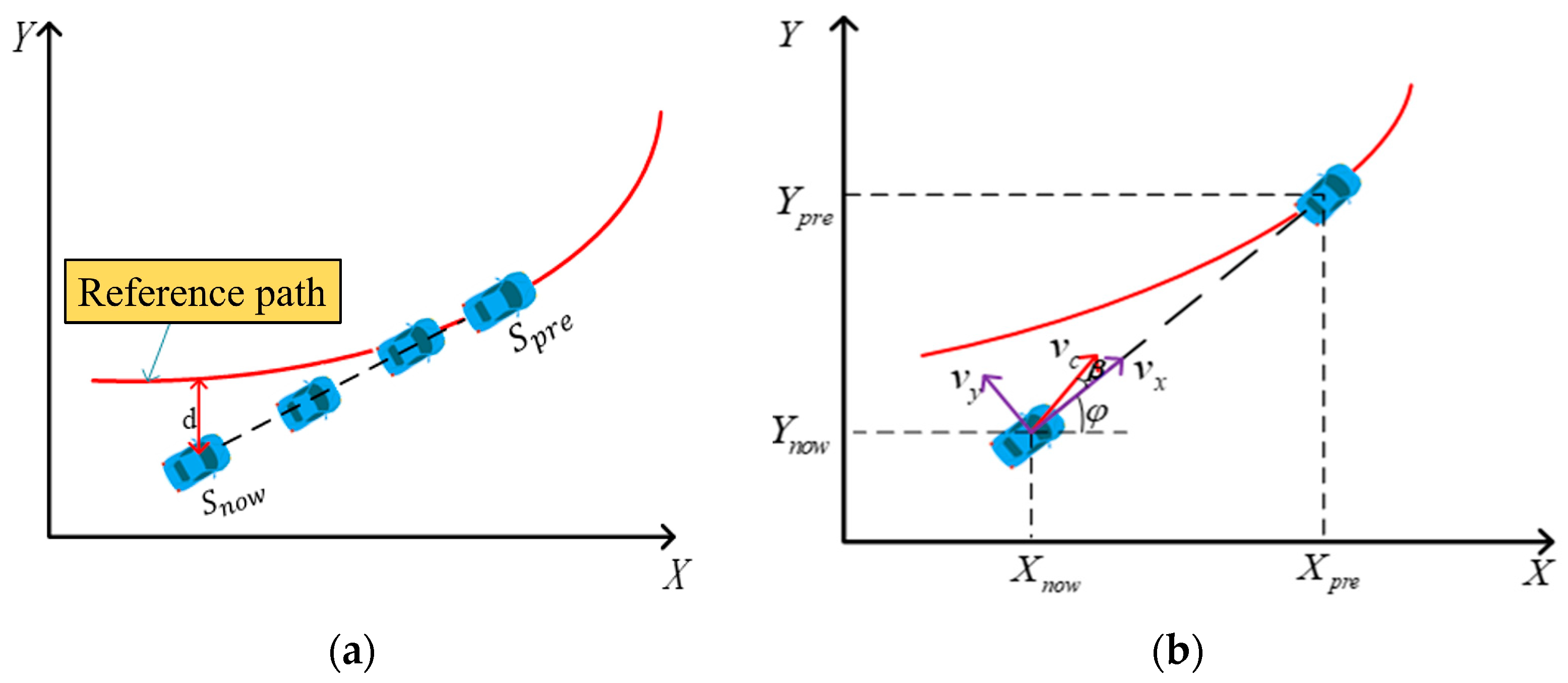
2.1. Vehicle Dynamic Error Tracking Model
2.2. Continuous Error State Space
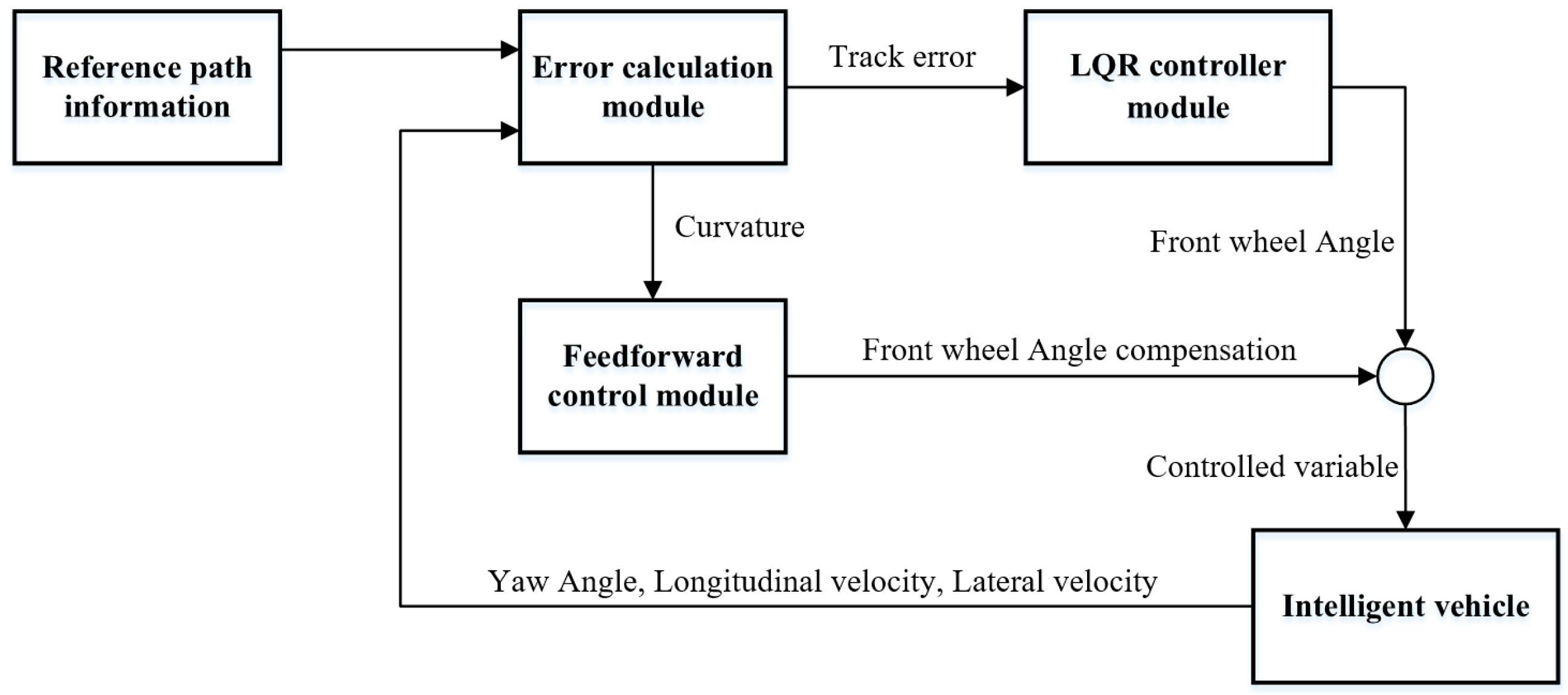
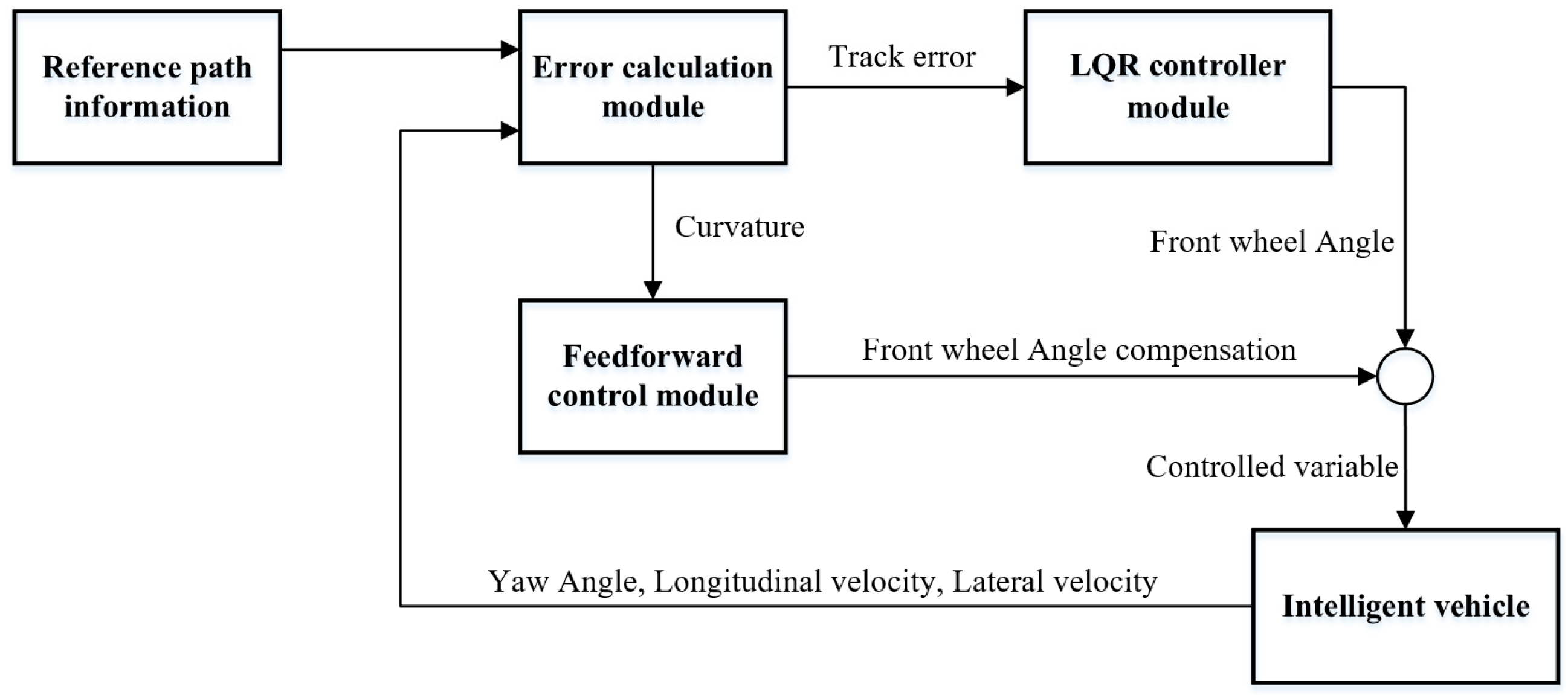
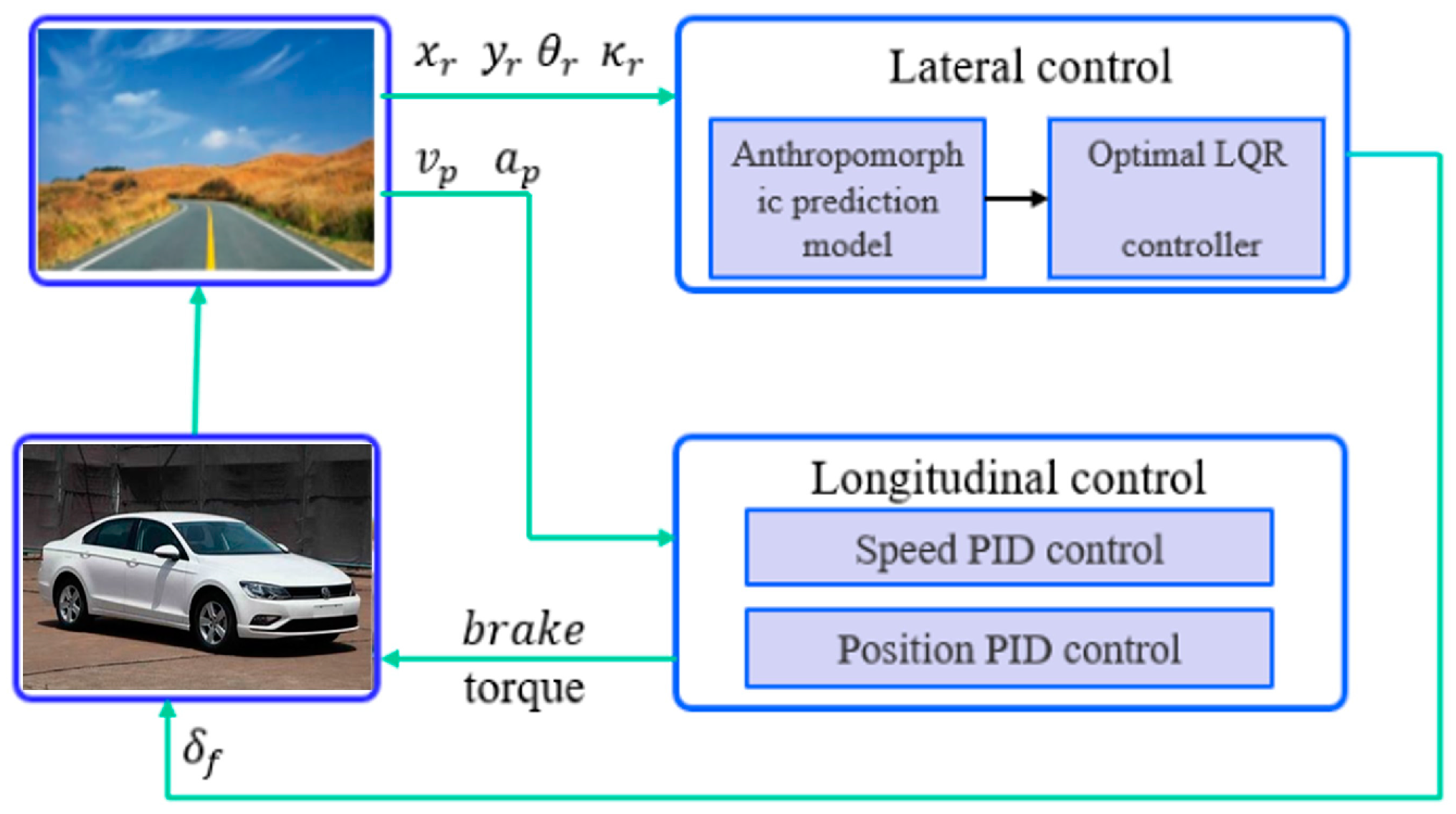
3. Lateral Trajectory Tracking Controller Design
3.1. Design of an Optimal Controller
3.2. Anthropomorphic Prediction Module
3.2.1. Feedforward Control Design
3.2.2. Anthropomorphic Prediction Module
3.3. Lateral Velocity Viewer Design
Luenberger Observer with Gain Matrix L
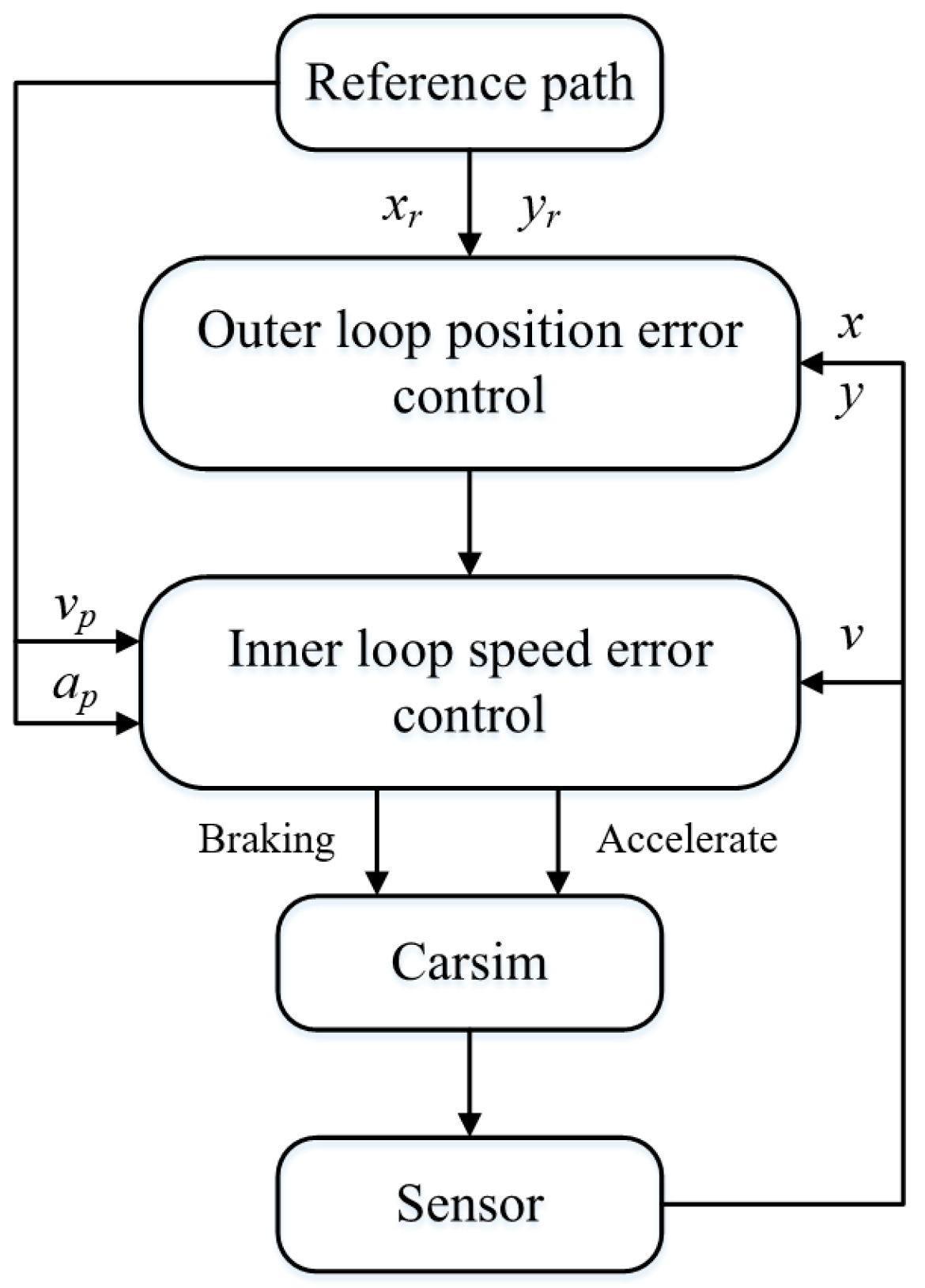
4. Longitudinal Controller Design
5. Simulation Verification
5.1. Software Simulation Verification and Analysis
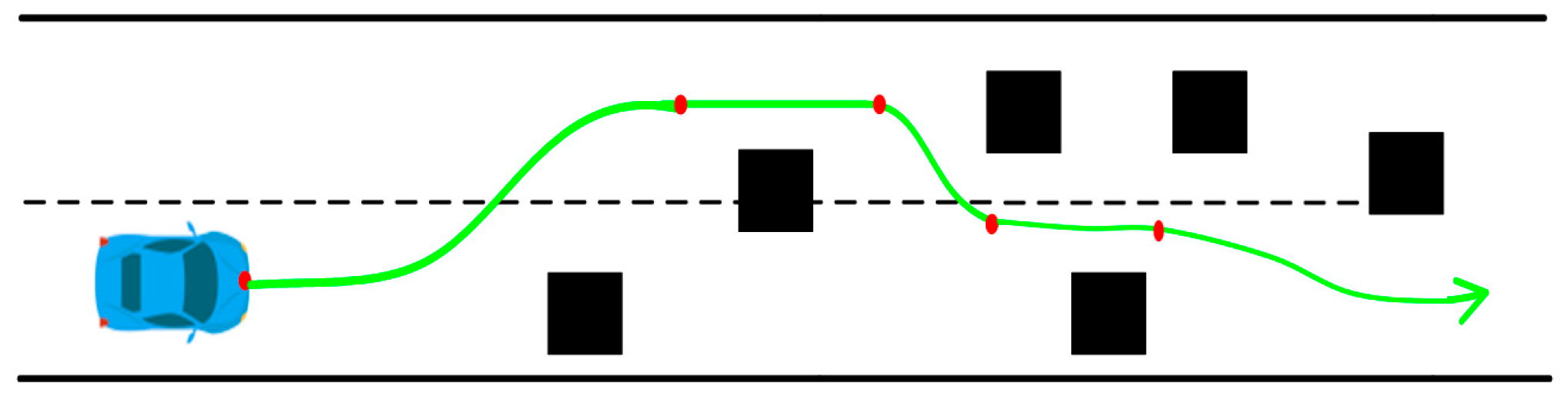
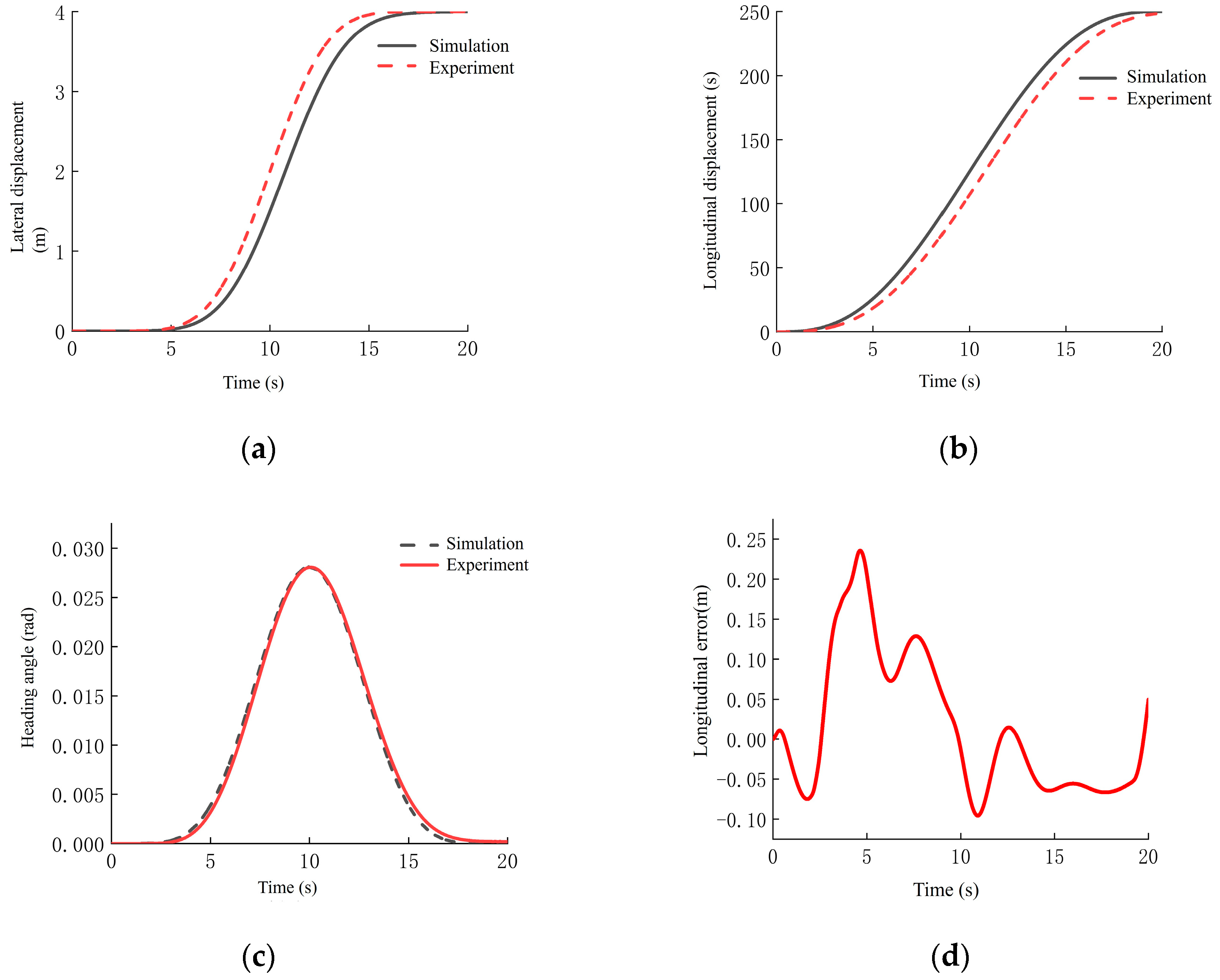
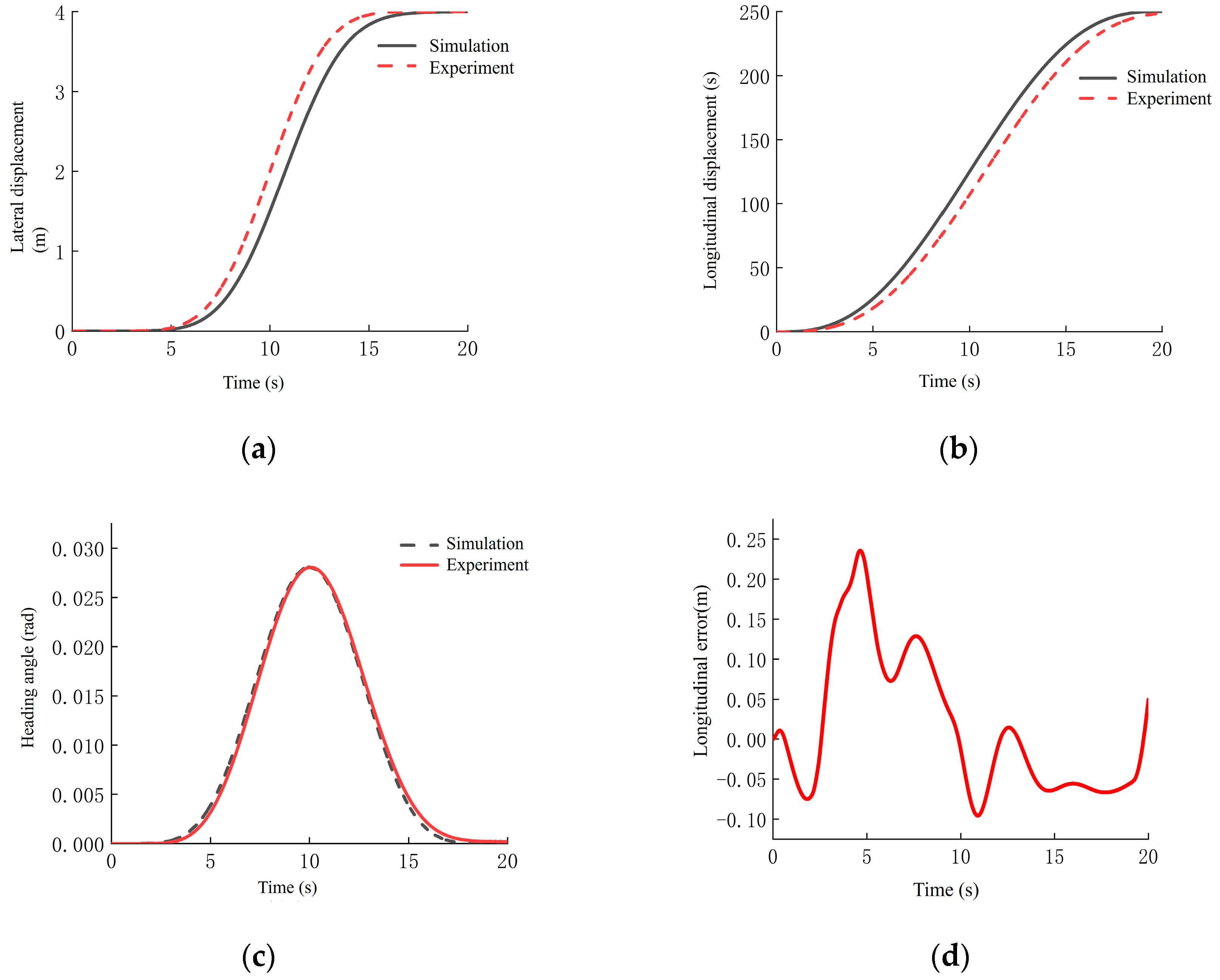
5.1.1. Experimental Verification of Trajectory Tracking Simulation
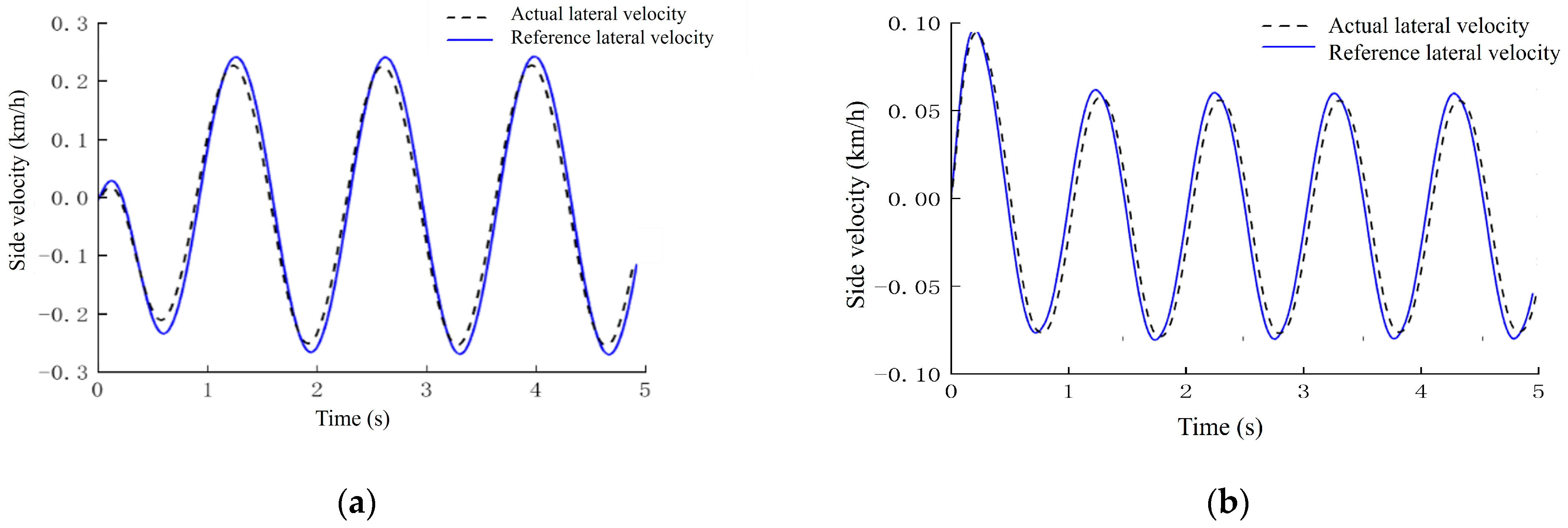
5.1.2. Experimental Validation of Lateral Observer Simulation
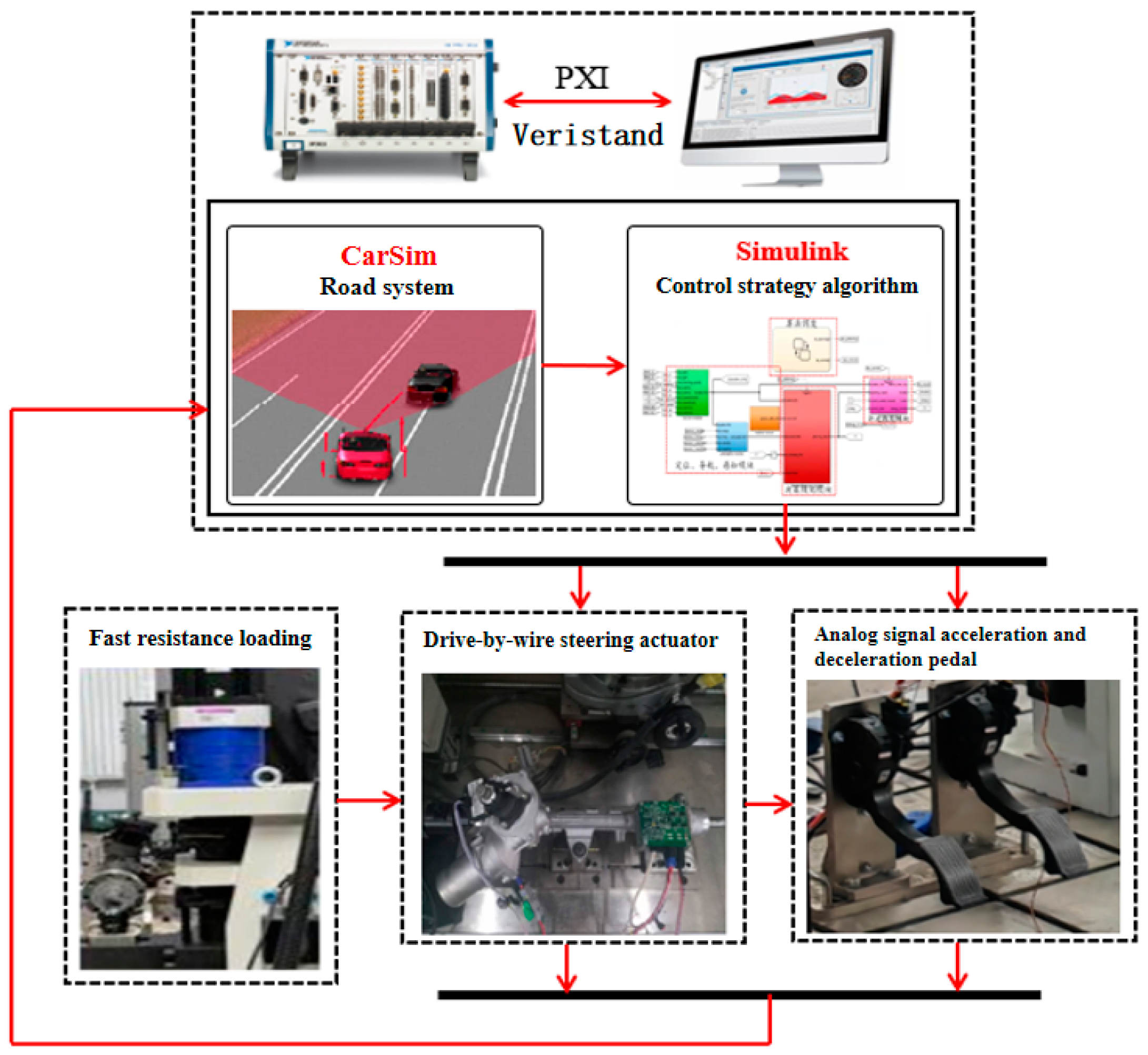
5.2. Hardware-in-the-Loop Simulation Verification and Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Akopov, A.S.; Beklaryan, L.A.; Beklaryan, A.L. Simulation-Based Optimisation for Autonomous Transportation Systems Using a Parallel Real-Coded Genetic Algorithm with Scalable Nonuniform Mutation. Cybern. Inf. Technol. 2021, 21, 127–144. [Google Scholar] [CrossRef]
- Chen, H.; Chen, S.; Gong, J. Research review on lateral control methods for intelligent vehicles. J. Mil. Eng. 2017, 38, 1203–1214. [Google Scholar] [CrossRef]
- Ji, J.; Khajepour, A.; Melek, W.W.; Huang, Y. Path Planning and Tracking for Vehicle Collision Avoidance Based on Model Predictive Control With Multiconstraints. IEEE Trans. Veh. Technol. 2017, 66, 952–964. [Google Scholar] [CrossRef]
- Zhang, S.; Zhao, X.; Zhu, G.; Shi, P.; Hao, Y. Adaptive trajectory tracking control strategy of intelligent vehicle. Int. J. Distrib. Sens. Netw. 2020, 16, 5. [Google Scholar] [CrossRef]
- Li, R.; Yang, Z.; Yan, G.; Jian, L.; Li, G.; Li, Z. Robust Approximate Optimal Trajectory Tracking Control for Quadrotors. Aerospace 2024, 11, 149. [Google Scholar] [CrossRef]
- Deng, C.; Qian, Y.; Dong, H.; Xu, J.; Wang, W. Lane Change Trajectory Planning Based on Quadratic Programming in Rainy Weather. World Electr. Veh. J. 2023, 14, 252. [Google Scholar] [CrossRef]
- Wang, W.; Li, G.; Liu, S. Research on Trajectory Tracking Control of a Semi-Trailer Train Based on Differential Braking. World Electr. Veh. J. 2024, 15, 30. [Google Scholar] [CrossRef]
- Fu, W.; Liu, Y.; Zhang, X. Research on Accurate Motion Trajectory Control Method of Four-Wheel Steering AGV Based on Stanley-PID Control. Sensors 2023, 23, 7219. [Google Scholar] [CrossRef]
- Li, P.; Zhong, R.; Lu, S. Optimal control scheme of space tethered system for space debris deorbit. ACTA Astrona 2019, 165, 355–364. [Google Scholar] [CrossRef]
- Hui, S.; Li, Y.; Li, F.; Niu, X. Distributed LQR Optimal Protocol for Leader-Following Consensus. IEEE Trans. Cybern. 2019, 49, 3532–3546. [Google Scholar] [CrossRef]
- Carlos, O.; Ramon, L.; Abdelali, E.; Isabelle, Q. Robust LQR Control for PWM Converters: An LMI Approach. IEEE Trans. Ind. Electron. 2009, 56, 2548–2558. [Google Scholar] [CrossRef]
- Sharp, R.S.; Peng, H. Vehicle dynamics applications of optimal control theory: Vehicle System Dynamics. Veh. Syst. Dyn. 2011, 49, 1073–1111. [Google Scholar] [CrossRef]
- Snider, J.M. Automatic steering methods for autonomous automobile path tracking. In Robotics Institute. CMURITR-09-08; Carnegie Mellon University: Pittsburgh, PA, USA, 2009. [Google Scholar]
- Xu, S.; Peng, H.; Tang, Y. Preview Path Tracking Control With Delay Compensation for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2979–2989. [Google Scholar] [CrossRef]
- Zhang, Y.; Niu, R.; Wang, J.; Liang, H.; Chen, Z.; Huang, Z. Path Tracking Control Algorithm Considering Delay Compensation. In Proceedings of the 2022 7th Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), Tianjin, China, 1–3 July 2022; pp. 64–69. [Google Scholar]
- Saif, A.-W.A.; El-Ferik, S.; Elkhider, S.M. Robust Stabilization of Linear Time-Delay Systems under Denial-of-Service Attacks. Sensors 2023, 23, 5773. [Google Scholar] [CrossRef]
- Okasha, M.; Kralev, J.; Islam, M. Design and Experimental Comparison of PID, LQR and MPC Stabilizing Controllers for ParrotMambo Mini-Drone. Aerospace 2022, 9, 298. [Google Scholar] [CrossRef]
- Wang, L.; Zhai, Z.; Zhu, Z.; Mao, E. Path Tracking Control of an Autonomous Tractor Using Improved Stanley Controller Optimized with Multiple-Population Genetic Algorithm. Actuators 2022, 11, 22. [Google Scholar] [CrossRef]
- AbdElmoniem, A.; Osama, A.; Abdelaziz, M.; Maged, S.A. A path-tracking algorithm using predictive Stanley lateral controller. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420974852. [Google Scholar] [CrossRef]
- Luan, Z.; Zhang, J.; Zhao, W.; Wang, C. Trajectory Tracking Control of Autonomous Vehicle With Random Network Delay. IEEE Trans. Veh. Technol. 2020, 69, 8140–8150. [Google Scholar] [CrossRef]
- Yu, J.; Guo, X.; Pei, X.; Chen, Z.; Zhou, W.; Zhu, M.; Wu, C. Path tracking control based on tube MPC and time delay motionprediction. IET Intell. Transp. Syst. 2019, 14, 1–12. [Google Scholar] [CrossRef]
- Xu, S.; Peng, H.; Song, Z.; Chen, K.; Tang, S. Design and test of speed tracking control for the self-driving Lincoln MKZ platform. IEEE Trans. Intell. Veh. 2019, 5, 324–334. [Google Scholar] [CrossRef]
- Yu, S.; Li, X.; Chen, H.; Allgöwer, F. Nonlinear model predictive control for path following problems. Int. J. Robust Nonlinear Control 2015, 25, 1168–1182. [Google Scholar] [CrossRef]
- Mayne, D.Q. Model predictive control: Recent developments and future promise. Automatica 2014, 50, 2967–2986. [Google Scholar] [CrossRef]
- Pang, H.; Liu, N.; Hu, C.; Xu, Z. A practical trajectory tracking control of autonomous vehicles using linear time-varying MPC method. Proc. Inst. Mech. Eng. 2021, 236, 709–723. [Google Scholar] [CrossRef]
- Xu, S.; Peng, H. Design, Analysis, and Experiments of Preview Path Tracking Control for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 48–58. [Google Scholar] [CrossRef]
- Hayase, M.; Ichikawa, K. Optimal servosystem utilizing future value of desired function. Trans. Soc. Instrum. Control Eng. 1969, 5, 86–94. [Google Scholar] [CrossRef]
- Katayama, T.; Hirono, T. Design of an optimal servomechanism with preview action and its dual problem. Int. J. Control 1987, 45, 407–420. [Google Scholar] [CrossRef]
- Wu, J.; Liao, F.; Tomizuka, M. Optimal preview control for a linear continuous-time stochastic control system in finite-time horizon. Int. J. Syst. Sci. 2017, 4, 129–137. [Google Scholar] [CrossRef]
- Katayama, T.; Ohki, T.; Inoue, T.; Kato, T. Design of an optimal controller for a discrete-time system subject to previewable demand. Int. J. Control 1985, 41, 677–699. [Google Scholar] [CrossRef]
- Gad, A.S. Preview Model Predictive Control Controller for Magnetorheological Damper of Semi-Active Suspension to Improve Both Ride and Handling. SAE Int. J. Veh. Dyn. Stab. NVH 2020, 4, 305–326. [Google Scholar] [CrossRef]
- Leon, F.; Gavrilescu, M. A Review of Tracking and Trajectory Prediction Methods for Autonomous Driving. Mathematics 2021, 9, 660. [Google Scholar] [CrossRef]
- Liu, H.; Liu, C.; Hao, L.; Zhang, D. Stability Analysis of Lane-Keeping Assistance System for Trucks under Crosswind Conditions. Appl. Sci. 2023, 13, 9891. [Google Scholar] [CrossRef]
- Pontryagin, L.S.; Boltyanskii, V.G.; Gamkrelidze, R.V.; Mishchenko, E.F. Mathematical Theory of Optimal Processes; Wiley Interscience: London, UK, 1987. [Google Scholar] [CrossRef]
- Xu, D.; Wang, Q.; Li, Y. Adaptive Optimal Robust Control for Uncertain Nonlinear Systems Using Neural Network Approximation in Policy Iteration. Appl. Sci. 2021, 11, 2312. [Google Scholar] [CrossRef]
- Li, B.; Lu, Y.; Huang, Y. Research and simulation of control system based on improved Lomborg observer. Instrum. Technol. 2019, 9, 32–36. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Unite |
|---|---|---|
| a | 1015 | mm |
| b | 1895 | mm |
| m | 1270 | |
| I | 1536.71 | |
| 124,760 | N/rad | |
| 85,200 | N/rad |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Li, G.; Song, J.; Liu, B. Research on an Intelligent Vehicle Trajectory Tracking Method Based on Optimal Control Theory. World Electr. Veh. J. 2024, 15, 160. https://doi.org/10.3390/wevj15040160
Wang S, Li G, Song J, Liu B. Research on an Intelligent Vehicle Trajectory Tracking Method Based on Optimal Control Theory. World Electric Vehicle Journal. 2024; 15(4):160. https://doi.org/10.3390/wevj15040160
Chicago/Turabian StyleWang, Shuang, Gang Li, Jialin Song, and Boju Liu. 2024. "Research on an Intelligent Vehicle Trajectory Tracking Method Based on Optimal Control Theory" World Electric Vehicle Journal 15, no. 4: 160. https://doi.org/10.3390/wevj15040160