
Design and Analysis Models with PID and PID Fuzzy Controllers for Six-Phase Drive


Abstract
:1. Introduction
2. Materials and Methods
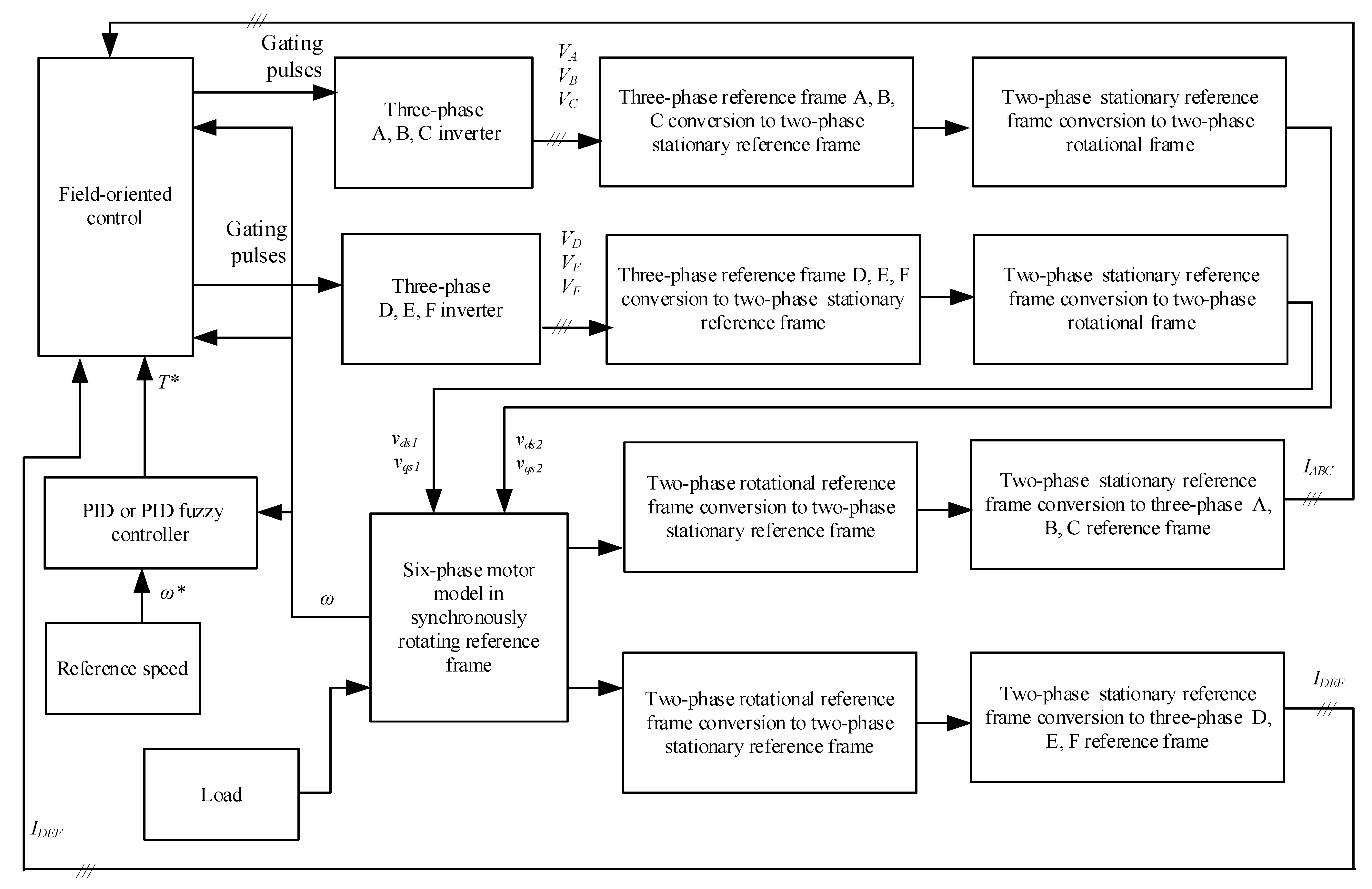
2.1. The Basics of the Simulink Model
2.2. Model of Indirect Rotor Flux Orientation
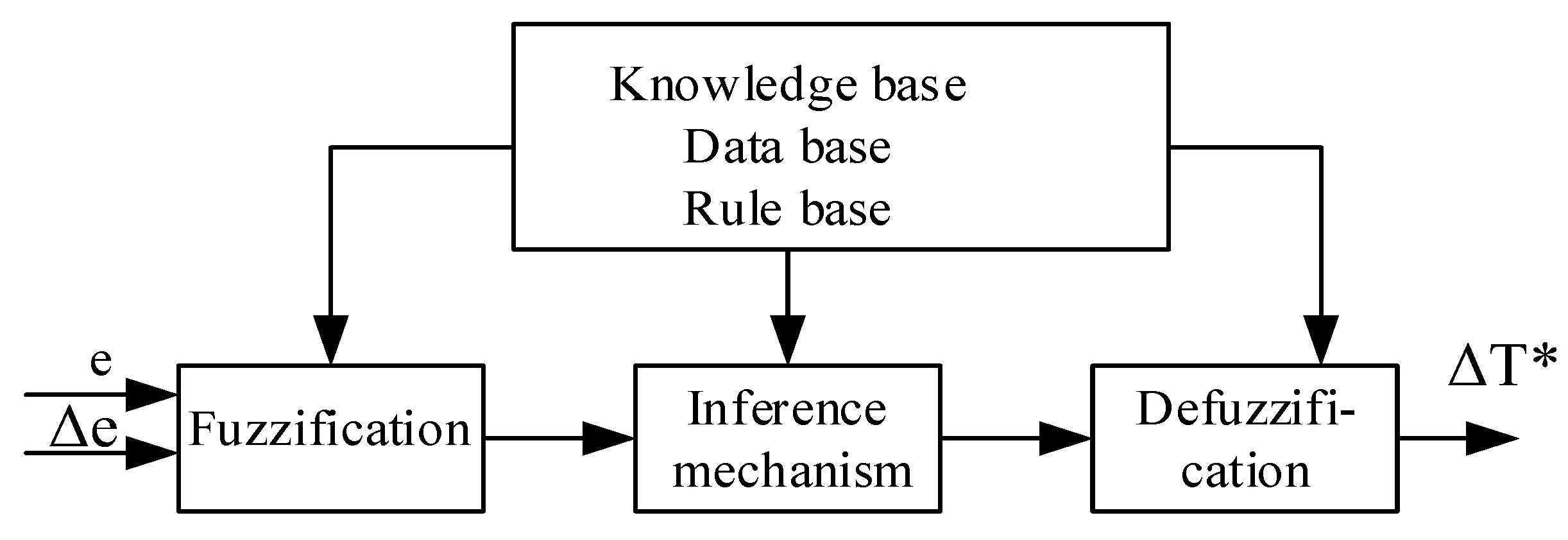
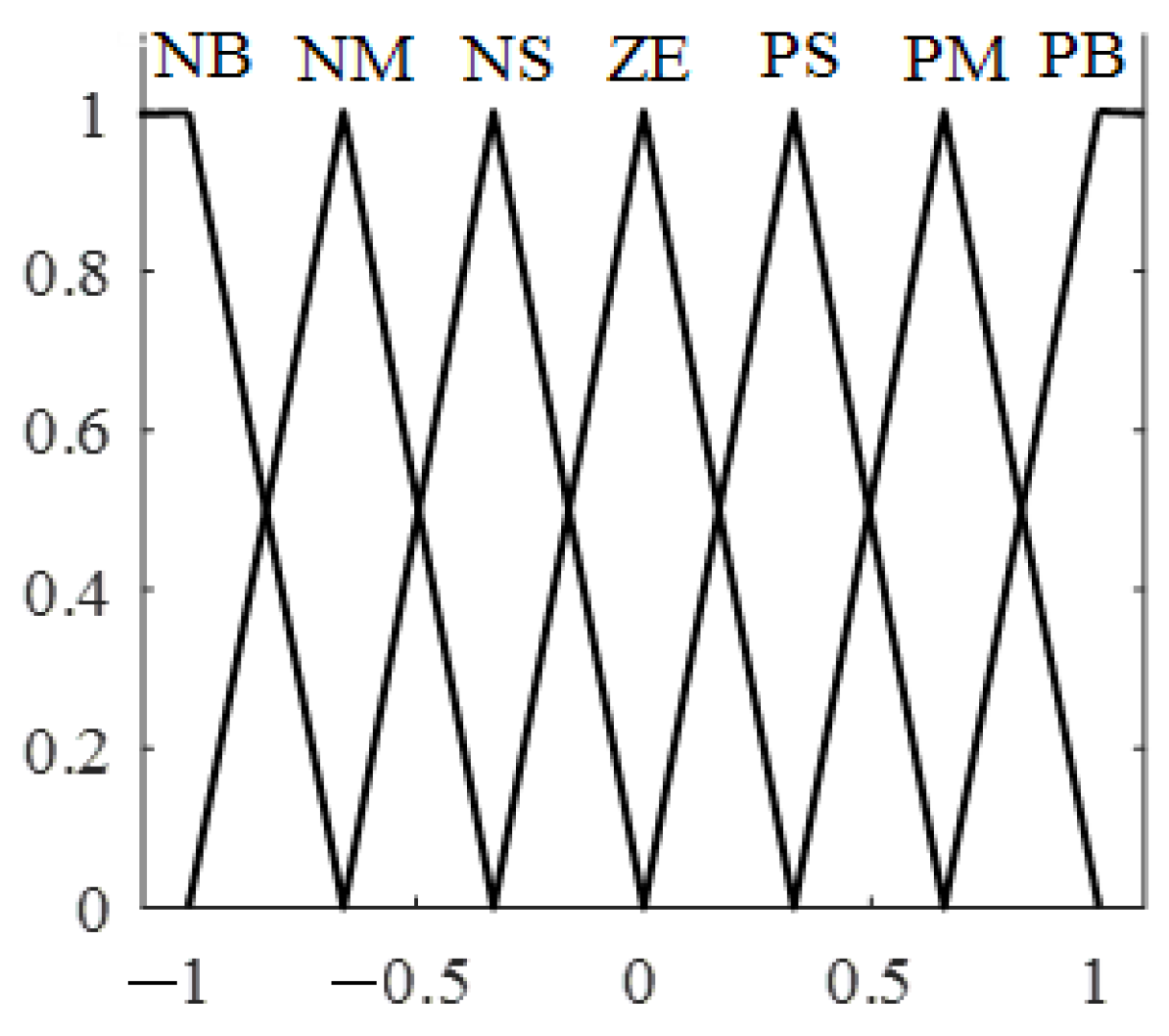
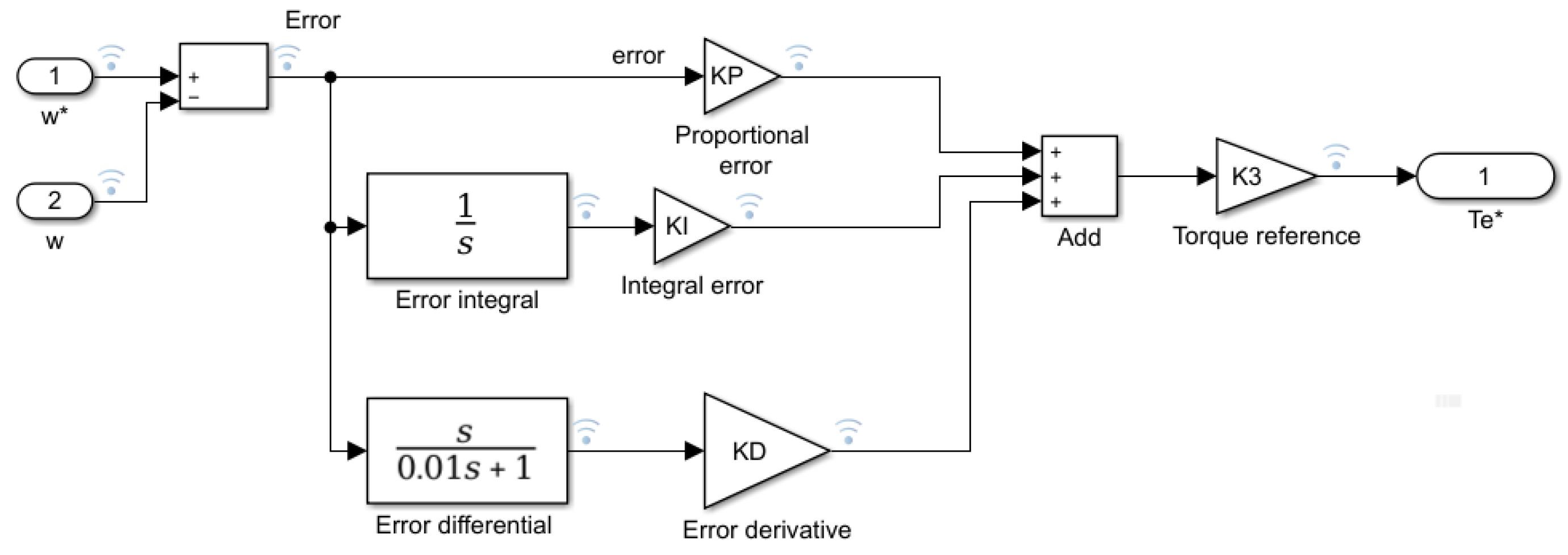
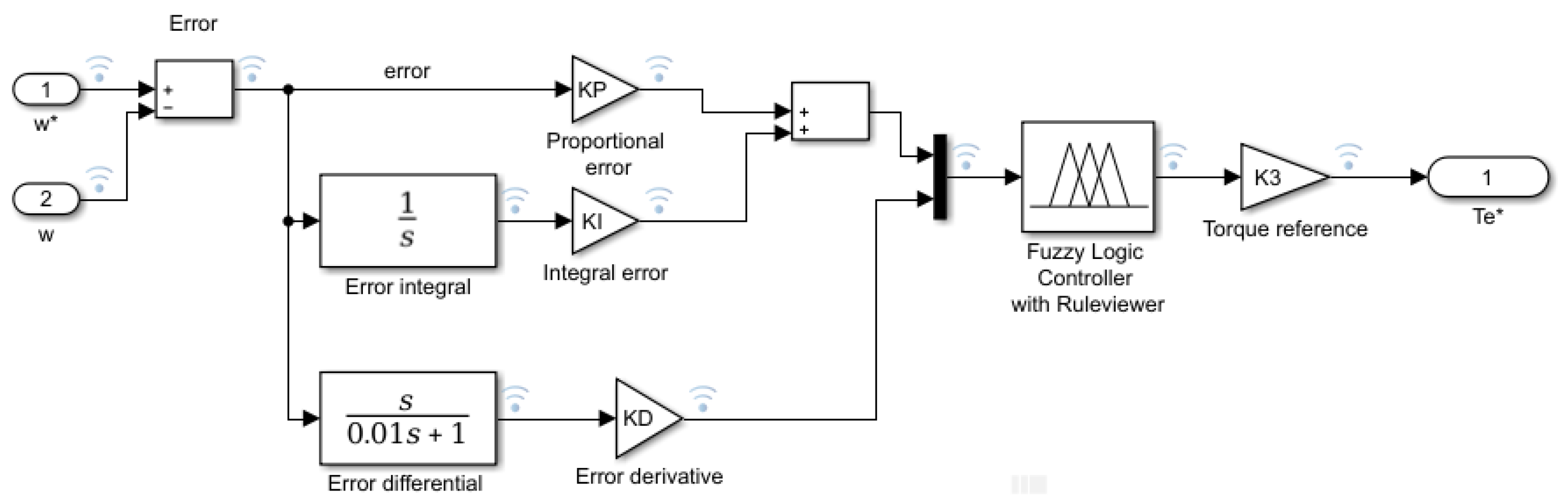
2.3. PID and PID Fuzzy Controllers
3. Simulation Results of System with PID and PID Fuzzy Controllers
3.1. Simulation Results of System with PID Controller
3.1.1. Step Response of System with PID Controller
3.1.2. Simulation Results of System with PID Controller and Provided Reference Speed
3.2. Simulation Results with PID Fuzzy Controller
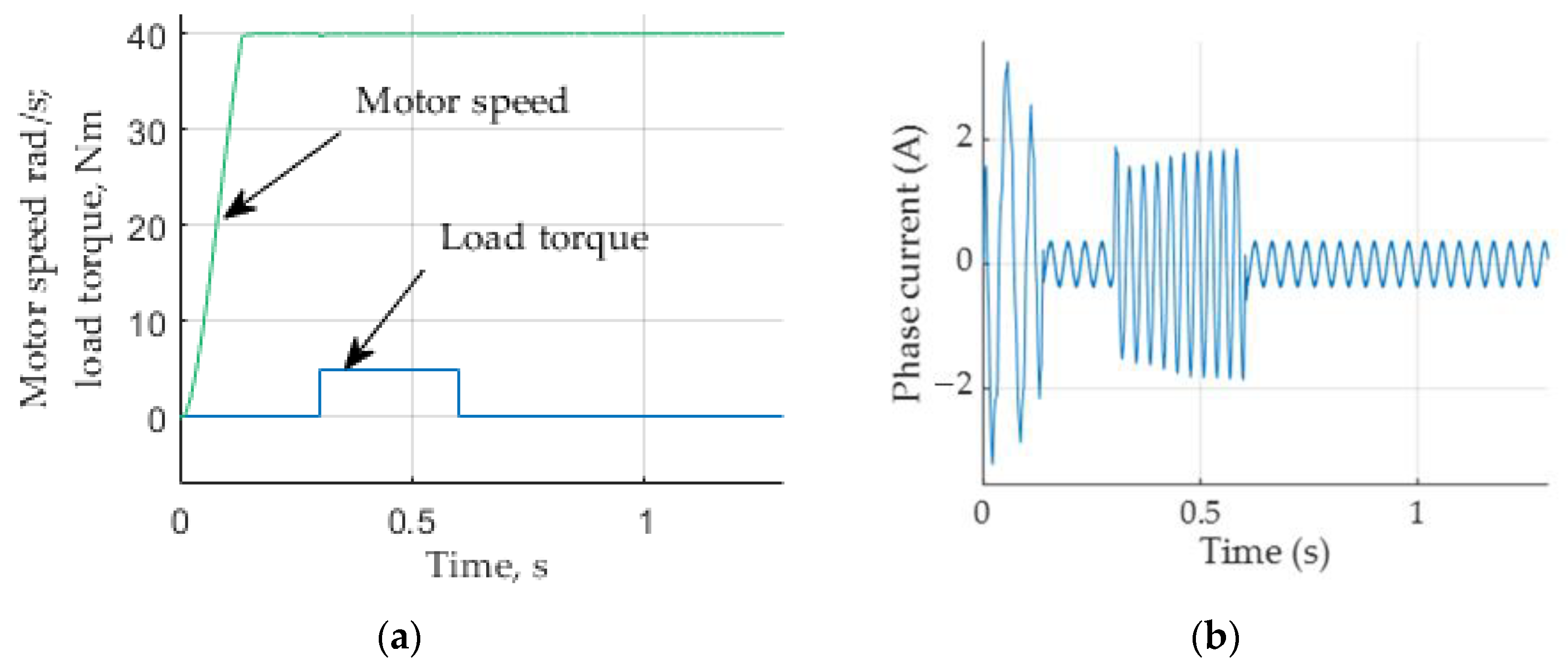
3.2.1. Step Response of System with PID Fuzzy Controller
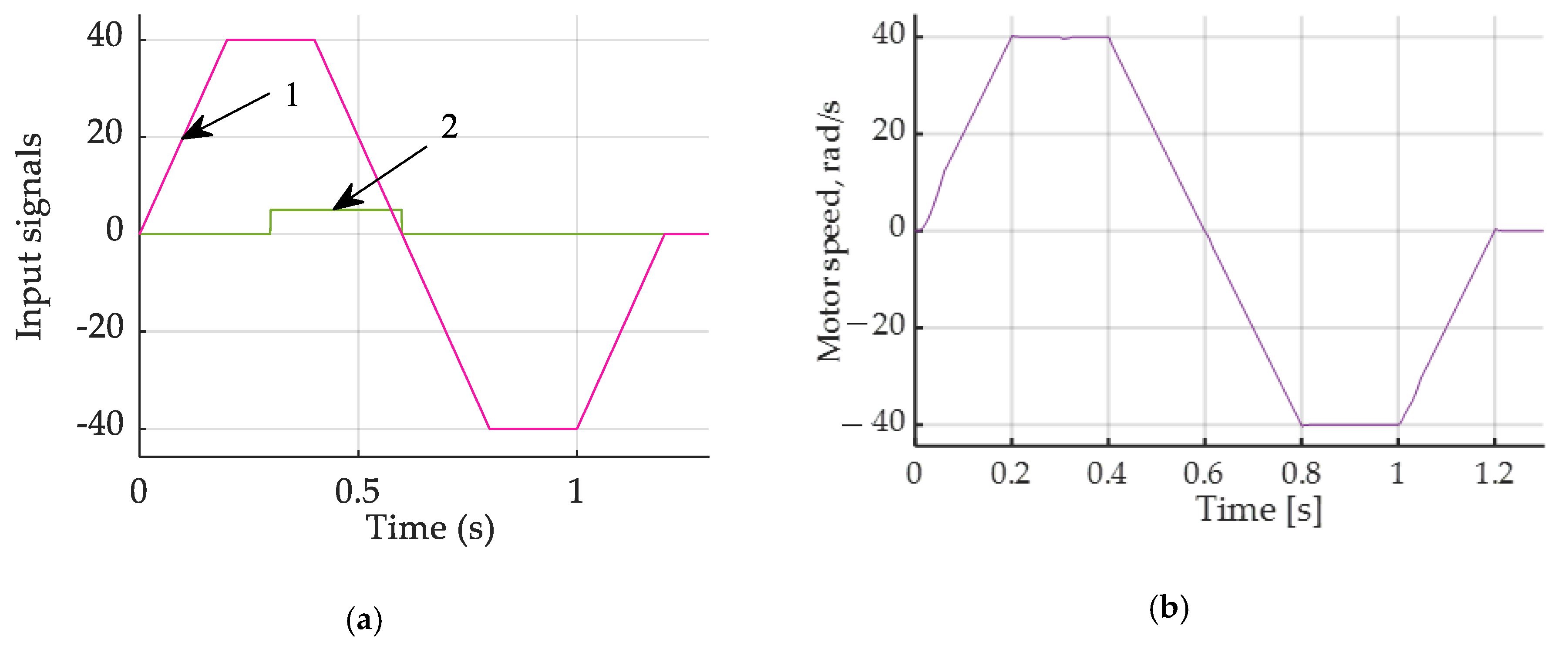
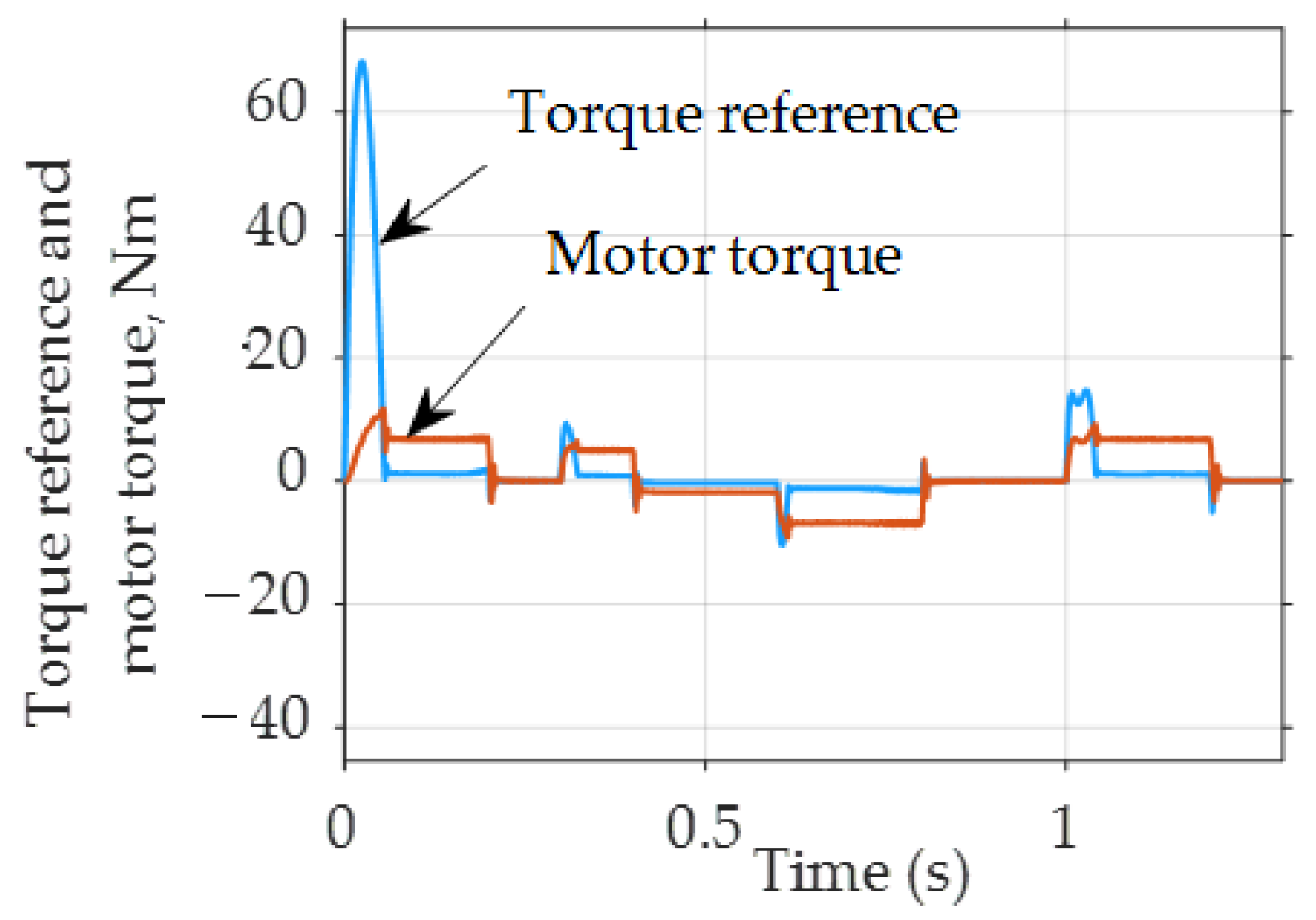
3.2.2. Simulation Results of System with PID Fuzzy Controller and Provided Reference Speed
4. Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Levi, E. Multiphase electric machines for variable-speed applications. IEEE Trans. Ind. Electron. 2008, 55, 1893–1909. [Google Scholar] [CrossRef]
- Brazhnikov, A.V.; Belozerov, I.R. Prospects for the use of Multiphase Inverter-fed Asynchronous Drives in the Field of Traction Systems of Railway Vehicles. Int. J. Railw. 2012, 5, 38–47. [Google Scholar] [CrossRef]
- Bugade, V. Multiphase Induction Motor Drive for Energy and Electrical Transportation Applications. Int. J. Res. Appl. Sci. Eng. Technol. 2018, 6, 166–174. [Google Scholar] [CrossRef]
- Akpama, E.J. Six Phase Induction Motor Modelling for Submarine Application. J. Electr. Electron. Eng. 2018, 13, 61–66. [Google Scholar] [CrossRef]
- Abdelwanis, M.I.; Selim, F. A sensorless six-phase induction motor driving a centrifugal pump system. In Proceedings of the 2017 19th International Middle-East Power Systems Conference, MEPCON 2017, Cairo, Egypt, 19–21 December 2017; pp. 242–247. [Google Scholar] [CrossRef]
- Rao, Y.L.N. A novel electric vehicle control—Electronic differential—Strategy using five phase induction motor. Int. J. Creat. Res. Thoughts 2018, 32, 153–159. [Google Scholar]
- Salem, A.; Narimani, M. A Review on Multiphase Drives for Automotive Traction Applications. IEEE Trans. Transp. Electrif. 2019, 5, 1329. [Google Scholar] [CrossRef]
- Listwan, J.; Oleszczyszyn, P. Analysis of the Drive of the Electric Vehicle with Six-Phase Induction Motor. Power Electron. Drives 2023, 8, 252–274. [Google Scholar] [CrossRef]
- Cao, W.; Mecrow, B.C.; Atkinson, G.J.; Bennett, J.W.; Atkinson, D.J. Overview of electric motor technologies used for more electric aircraft (MEA). IEEE Trans. Ind. Electron. 2012, 59, 3523–3531. [Google Scholar] [CrossRef]
- Xie, J.; Shi, W.; Shi, Y. Research on Fault Diagnosis of Six-Phase Propulsion Motor Drive Inverter for Marine Electric Propulsion System Based on Res-BiLSTM. Machines 2022, 10, 736. [Google Scholar] [CrossRef]
- Mesai-Ahmed, H.; Jlassi, I.; Marques Cardoso, A.J.; Bentaallah, A. Multiple Open-Circuit Faults Diagnosis in Six-Phase Induction Motor Drives Using Stator Current Analysis. IEEE Trans. Power Electron. 2022, 37, 7275–7285. [Google Scholar] [CrossRef]
- Antunes, H.R.P.; Fonseca, D.S.B.; Cardoso, A.J.M. Modeling of Symmetrical Six-Phase Induction Machines Under Stator Faults. IEEE Trans. Ind. Appl. 2023, 59, 3232–3242. [Google Scholar] [CrossRef]
- Singh, G.K.; Iqbal, A. Modeling and analysis of six-phase synchronous motor under fault condition. Chin. J. Electr. Eng. 2017, 3, 62–75. [Google Scholar] [CrossRef]
- Venter, P.; Jimoh, A.A.; Munda, J.L. Realization of a ‘3 & 6 phase’ induction machine. In Proceedings of the 2012 20th International Conference on Electrical Machines, ICEM 2012, Marseille, France, 2–5 September 2012; pp. 447–453. [Google Scholar] [CrossRef]
- Renukadevi, G.; Rajambal, K. Generalized model of multi-phase induction motor drive using matlab/Simulink. In Proceedings of the 2011 IEEE PES International Conference on Innovative Smart Grid Technologies-India, ISGT India 2011, Kollam, India, 1–3 December 2011; pp. 114–119. [Google Scholar] [CrossRef]
- Levi, E.; Bojoi, R.; Profumo, F.; Toliyat, H.A.; Williamson, S. Multiphase induction motor drives—A technology status review. IET Electr. Power Appl. 2007, 1, 489–516. [Google Scholar] [CrossRef]
- Mandal, S. Performance Analysis of Six-Phase Induction Motor. Int. J. Eng. Res. Technol. 2015, 4, 589–593. [Google Scholar]
- Nabi, H.P.; Dadashi, P.; Shoulaie, A. A novel structure for vector control of a symmetrical six-phase induction machine with three current sensors. In Proceedings of the 2011 10th International Conference on Environment and Electrical Engineering, EEEIC.EU 2011, Rome, Italy, 8–11 May 2011; Volume 1, pp. 23–29. [Google Scholar] [CrossRef]
- Aher, K.S.; Thosar, A.G. Modeling and Simulation of Five Phase Induction Motor using MATLAB/Simulink. Int. J. Eng. Res. Appl. 2016, 6, 1–8. [Google Scholar]
- Gregor, R.; Barrero, F.; Toral, S.; Durán, M. Realization of an asynchronous six-phase induction motor drive test-rig. Renew. Energy Power Qual. J. 2008, 1, 101–105. [Google Scholar] [CrossRef]
- Zhao, Y.; Collins, E. Fuzzy PI control design for an industrial weigh belt feeder. IEEE Trans. Fuzzy Syst. 2003, 11, 311–319. [Google Scholar] [CrossRef]
- Akpama, E.J.; Anih, L.U. Modelling and Simulation of Multiphase Induction Machine. Int. J. Eng. Innov. Res. 2015, 4, 2277–5668. [Google Scholar]
- Vukosavic, S.; Jones, M.; Levi, E.; Varga, J. Rotor flux-oriented control of a symmetrical six-phase induction machine. Electr. Power Syst. Res. 2005, 75, 142–152. [Google Scholar] [CrossRef]
- Rinkevičiene, R.; Mitkienė, B.; Udris, D. Modelling and Comparison PID Fuzzy Controllers for Six-phase Drive. In Proceedings of the 2023 IEEE Open Conference of Electrical, Electronic and Information Sciences (eStream), Vilnius, Lithuania, 27 April 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Rinkeviciene, R.; Mitkiene, B.; Udris, D. Modelling of Six-Phase Electric Drive with PI and PD Fuzzy Controllers. In Proceedings of the 2021 IEEE Open Conference of Electrical, Electronic and Information Sciences, eStream 2021, Vilnius, Lithuania, 22 April 2021. [Google Scholar]
- Rinkeviciene, R.; Mitkiene, B.; Udris, D. Design and Comparison of Fuzzy Controllers for Six-phase Drive. In Proceedings of the 2020 IEEE Open Conference of Electrical, Electronic and Information Sciences, eStream 2020, Vilnius, Lithuania, 30 April 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Wogi, L.; Ayana, T.; Morawiec, M.; Jąderko, A. A Comparative Study of Fuzzy SMC with Adaptive Fuzzy PID for Sensorless Speed Control of Six-Phase Induction Motor. Energies 2022, 15, 8183. [Google Scholar] [CrossRef]
- Kundrotas, B.; Lisauskas, S.; Rinkeviciene, R. Model of multiphase induction motor. Elektron. Ir Elektrotechnika 2011, 111, 111–114. [Google Scholar] [CrossRef]
- Passino, K.M.; Yurkovich, S. Fuzzy control. In The Control Systems Handbook: Control System Advanced Methods, 2nd ed.; Taylor & Francis Ltd.: London, UK, 2010. [Google Scholar] [CrossRef]
- Bose, B.K. Modern Power Engineering and Electric Drives; Prentice Hall: Hoboken, NJ, USA, 2002. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error | ||||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | ||
| Derived error | PB | ZE | PS | PM | PB | PB | PB | PB |
| PM | NS | ZE | PS | PM | PB | PB | PB | |
| PS | NM | NS | ZE | PS | PM | PB | PB | |
| ZE | NB | NM | NS | ZE | PS | PM | PB | |
| NS | NB | NB | NM | NS | ZE | PS | PM | |
| NM | NB | NB | NB | NM | NS | ZE | PS | |
| NB | NB | NB | NB | NB | NM | NS | ZE | |
| Parameter | Notation | Data | Units |
|---|---|---|---|
| Magnetizing inductance | 0.295 | H | |
| Stator leakage inductance | 0.07 | H | |
| Stator mutual inductance | 0.07 | H | |
| Rotor leakage inductance | 0.115 | H | |
| Stator resistance | 68 | Ω | |
| Rotor resistance | 4.5 | Ω | |
| Motor inertia | J | 0.034 | |
| Number of poles | P | 8 |
| Performance Specifications | Controllers | Fuzzy Controllers | ||||||
|---|---|---|---|---|---|---|---|---|
| PD | PI | PI-D | PID | PD | PI | PI-D | PID | |
| Steady-state error, % | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Overshoot, % | 0 | 0. 5 | 0 | 0 | 0 | 0 | 0 | 0 |
| Settling time, s | 0.16 | 0.14 | 0.136 | 0.14 | 0.2 | 0.2 | 0.2 | 0.14 |
| Maximal error due to load, % | 0.75 | 0.5 | 1 | 0.5 | 1 | 1 | 0.5 | 0.75 |
| Load, Nm | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Fuzzy controller output | - | - | - | - | 0.89 | 0.89 | 0.89 | 0.86 |
| Torque reference, Nm | 1100 | 1000 | 1100 | 1100 | 22.3 | 22.16 | 22.2 | 22.1 |
| Greatest motor torque, Nm | 13.7 | 13.2 | 11.6 | 11.5 | 10.9 | 11.1 | 11.9 | 13 |
| Performance Specifications | Controllers | Fuzzy Controllers | ||||||
|---|---|---|---|---|---|---|---|---|
| PD | PI | PI_D | PID | PD | PI | PI-D | PID | |
| Steady-state error, % | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.075 |
| Overshoot, % | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Settling time, s | 0.2 | 0.2 | 0.2 | 0.2 | 0.2 | 0.2 | 0.2 | 0.2 |
| Maximal error due to load, Nm | 0.75 | 0.75 | 0.75 | 0.95 | 1 | 1 | 0.87 | 0.87 |
| Load, Nm | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Fuzzy controller output | - | - | - | - | 0.89 | 0.89 | 0.89 | 0.87 |
| Torque reference, Nm | 72 | 70.8 | 68 | 68 | 22.3 | 22.3 | 22.3 | 22.3 |
| Greatest motor torque, Nm | 11.7 | 11.7 | 11.6 | 11.5 | 10.8 | 10.9 | 11.8 | 11.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rinkeviciene, R.; Mitkiene, B. Design and Analysis Models with PID and PID Fuzzy Controllers for Six-Phase Drive. World Electr. Veh. J. 2024, 15, 164. https://doi.org/10.3390/wevj15040164
Rinkeviciene R, Mitkiene B. Design and Analysis Models with PID and PID Fuzzy Controllers for Six-Phase Drive. World Electric Vehicle Journal. 2024; 15(4):164. https://doi.org/10.3390/wevj15040164
Chicago/Turabian StyleRinkeviciene, Roma, and Brone Mitkiene. 2024. "Design and Analysis Models with PID and PID Fuzzy Controllers for Six-Phase Drive" World Electric Vehicle Journal 15, no. 4: 164. https://doi.org/10.3390/wevj15040164
APA StyleRinkeviciene, R., & Mitkiene, B. (2024). Design and Analysis Models with PID and PID Fuzzy Controllers for Six-Phase Drive. World Electric Vehicle Journal, 15(4), 164. https://doi.org/10.3390/wevj15040164