
Omnidirectional AGV Path Planning Based on Improved Genetic Algorithm

Abstract
1. Introduction
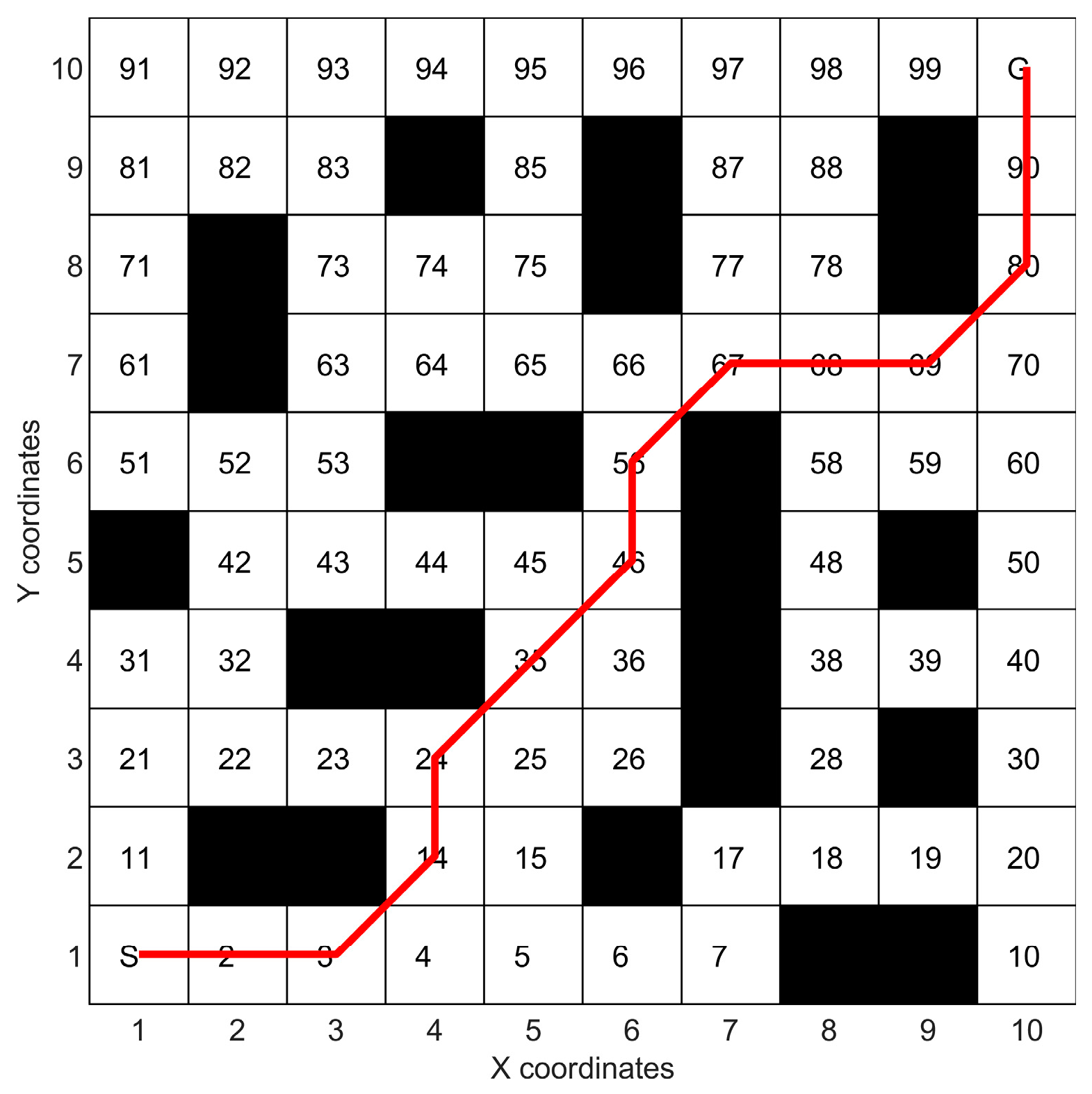
2. Establishment of Environmental Model
3. Genetic Algorithm Improvement and Implementation
3.1. Encoding Method
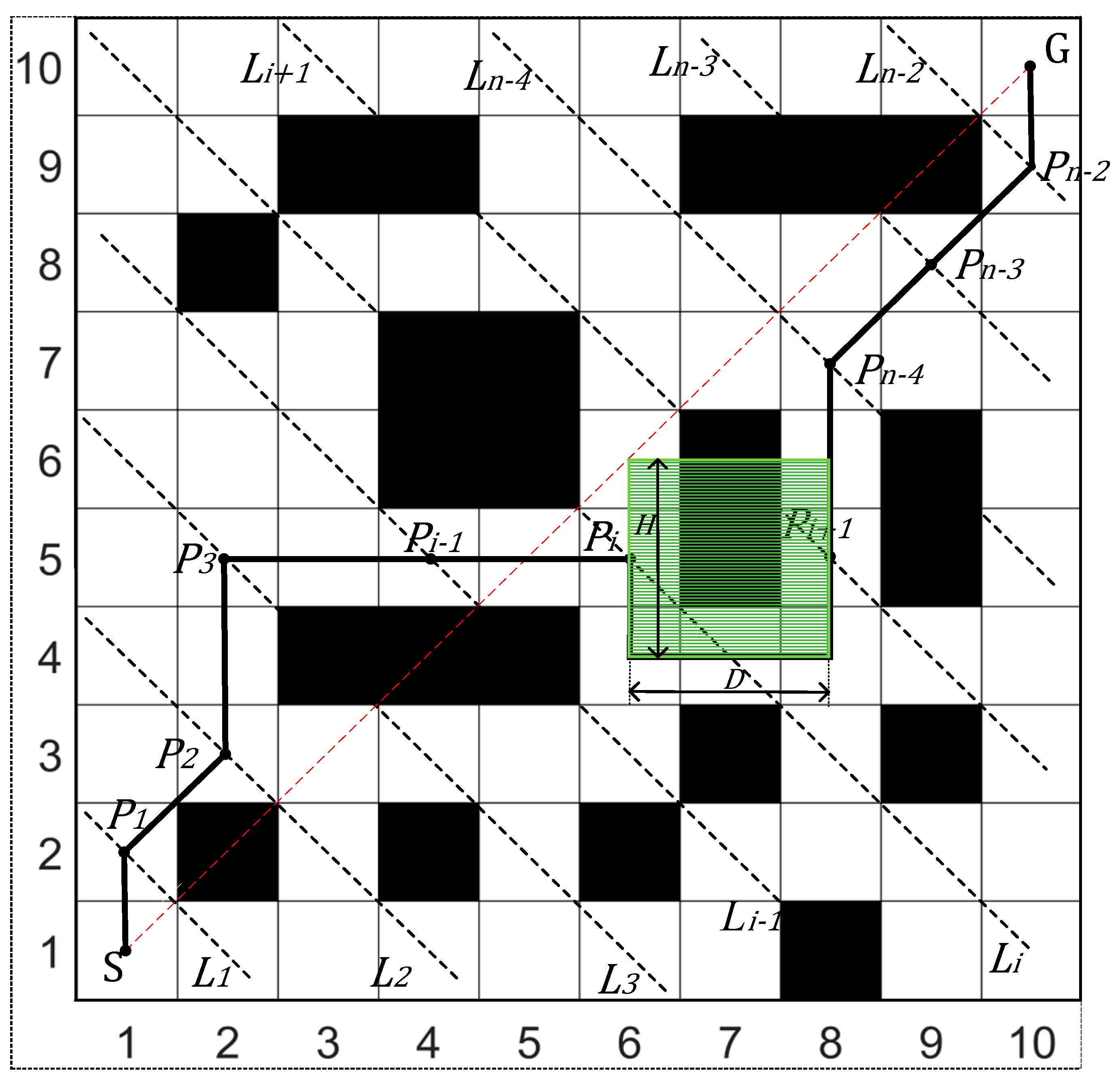
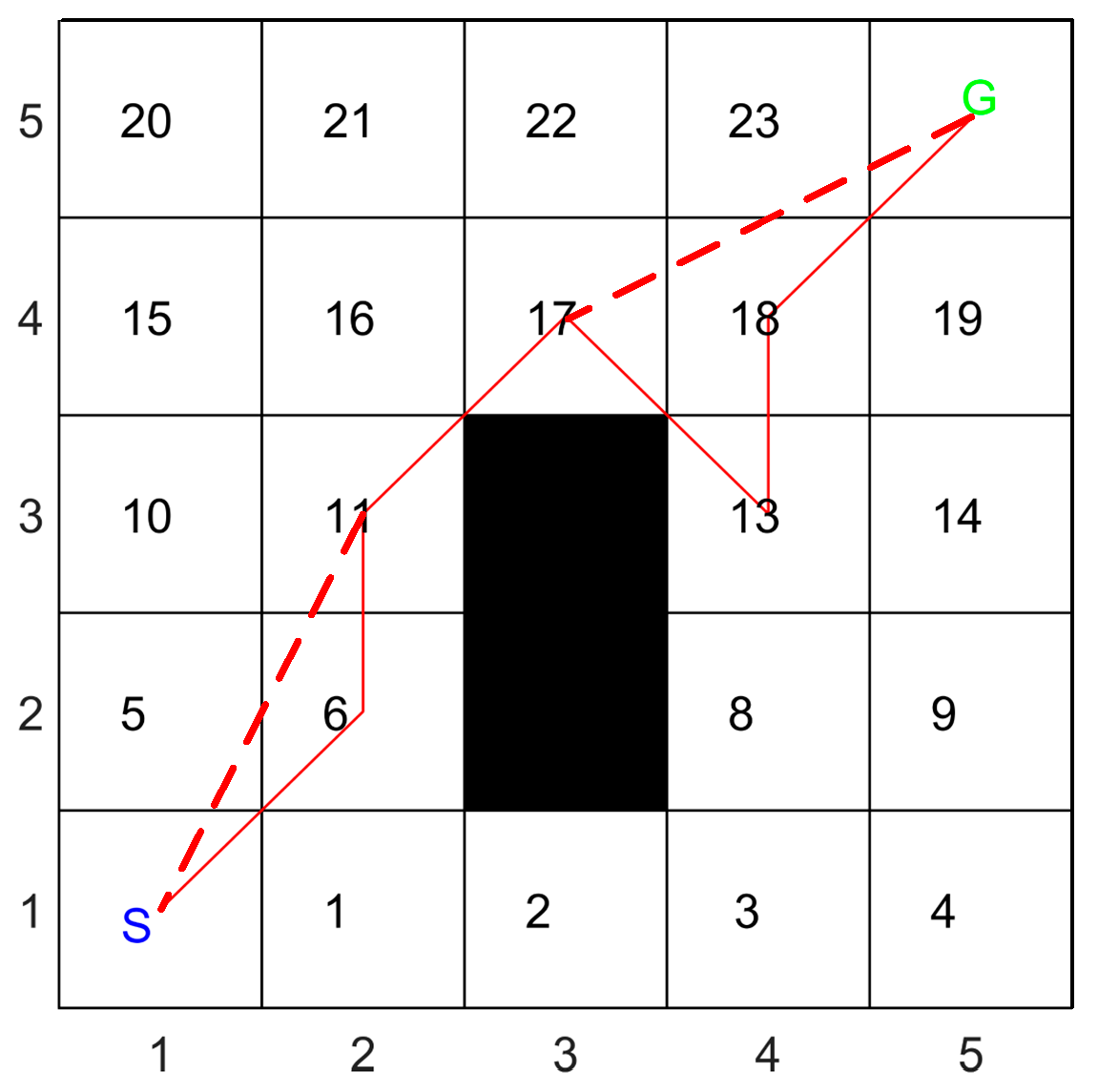
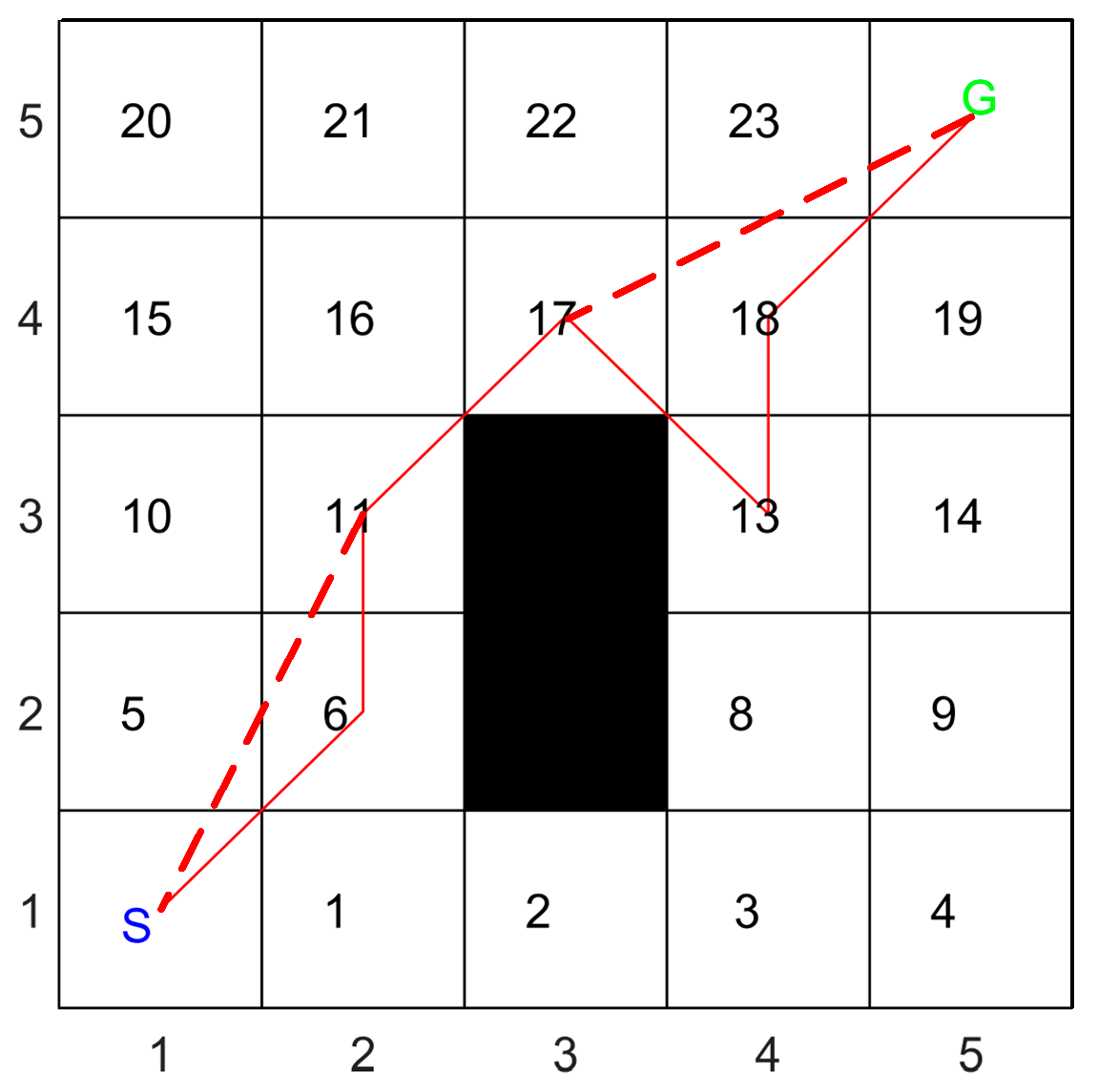
3.2. Population Initialization
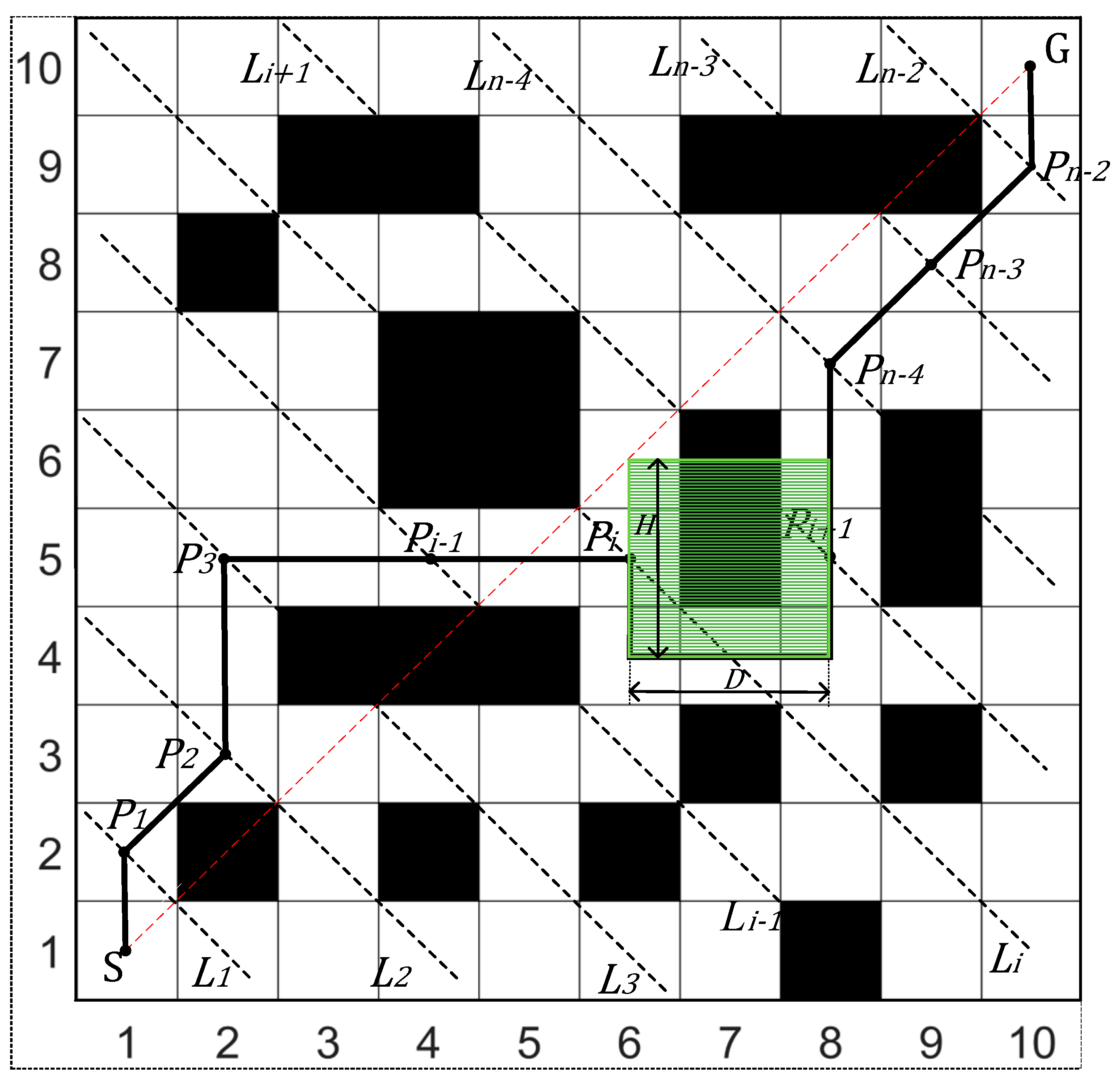
- (1)
- Determine the population size M by connecting the points S and G with a straight line, using S as the starting point and G as the destination point.
- (2)
- Divide the line SG vertically by the dotted line into n − 2 parts.
- (3)
- The point is randomly generated on the dashed line {i = 1, 2, …, n − 2} on the dashed line {i = 1, 2, …, n − 2}, the point is randomly generated, and the coordinates of are calculated as shown in Equation (2). If the generated is not in free space, a point in the neighborhood of in free space is regenerated to replace it.
- (4)
- Connect the randomly generated points into a continuous path. Starting from point S, if there is no obstacle between neighboring nodes, connect them with a straight line and go to step six. If there are obstacles, go to the next step.
- (5)
- Since the ACO algorithm is characterized by fast search speed and optimization on simple paths, this paper uses the ACO algorithm between two points with obstacles [17]. The maximum value of horizontal distance D and vertical distance H is taken as a square to determine the area to be planned S. Assuming that the starting point is A and the ending point is B, the centroid coordinates of the area S are . If the path generation fails because the area is too small and there is no path, the area of area S is increased by one unit in all directions, and then replanning is performed. In order to increase the initialization speed of the algorithm, the area of region S can only be increased twice. After two times, the area is set to fail to generate a feasible path, and random points A and B are regenerated for path planning. Consider and at the two ends of the obstacle as the start and end points, respectively. There are two key factors for the ants to move from the current position i to the next position j: probabilistic selection and pheromone updating. To further improve the convergence of the ACO algorithm and the quality of the initial population, the weighting factor in the state transition probability formula is
- (6)
- Determine whether goal point G has been reached. If it has, go to the next step; if it has not, return to step 4.
- (7)
- If there are duplicate paths in the generated individuals, delete them.
- (8)
- If the population size equals M, stop; otherwise, repeat steps 3 to 7.
3.3. Adaptation Function
- (1)
- Path length:
- (2)
- Path smoothness:
3.4. Improved Genetic Operations
3.4.1. Improve Selection Operations
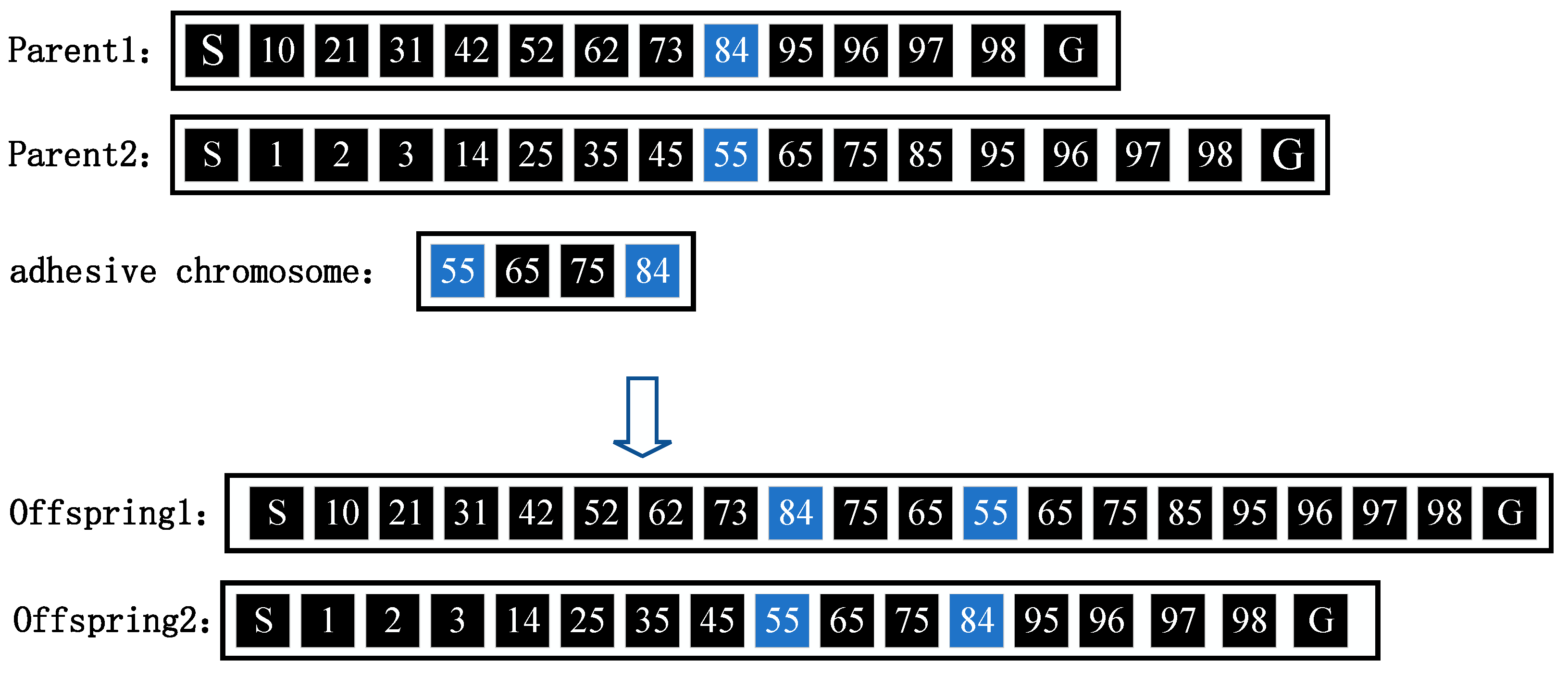
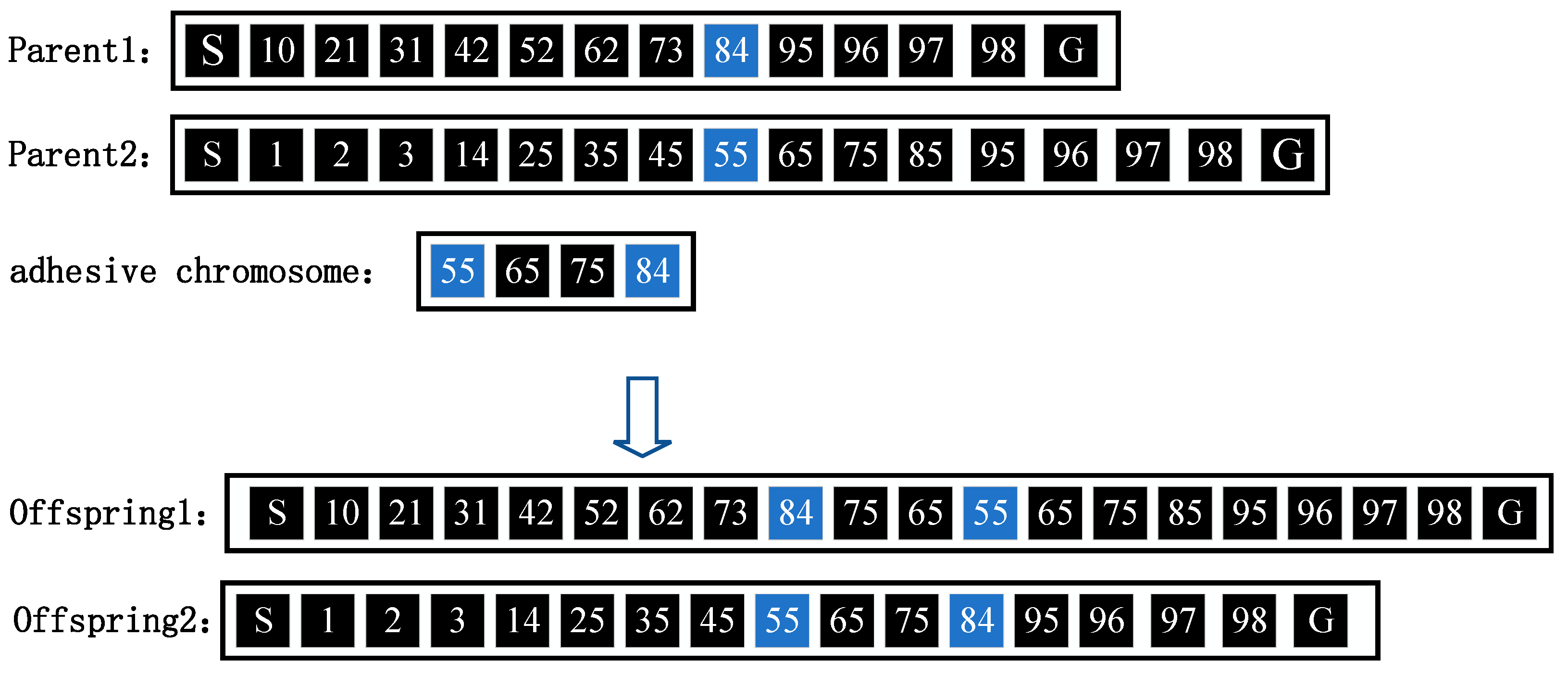
3.4.2. Double Crossover Based on Edit Distance
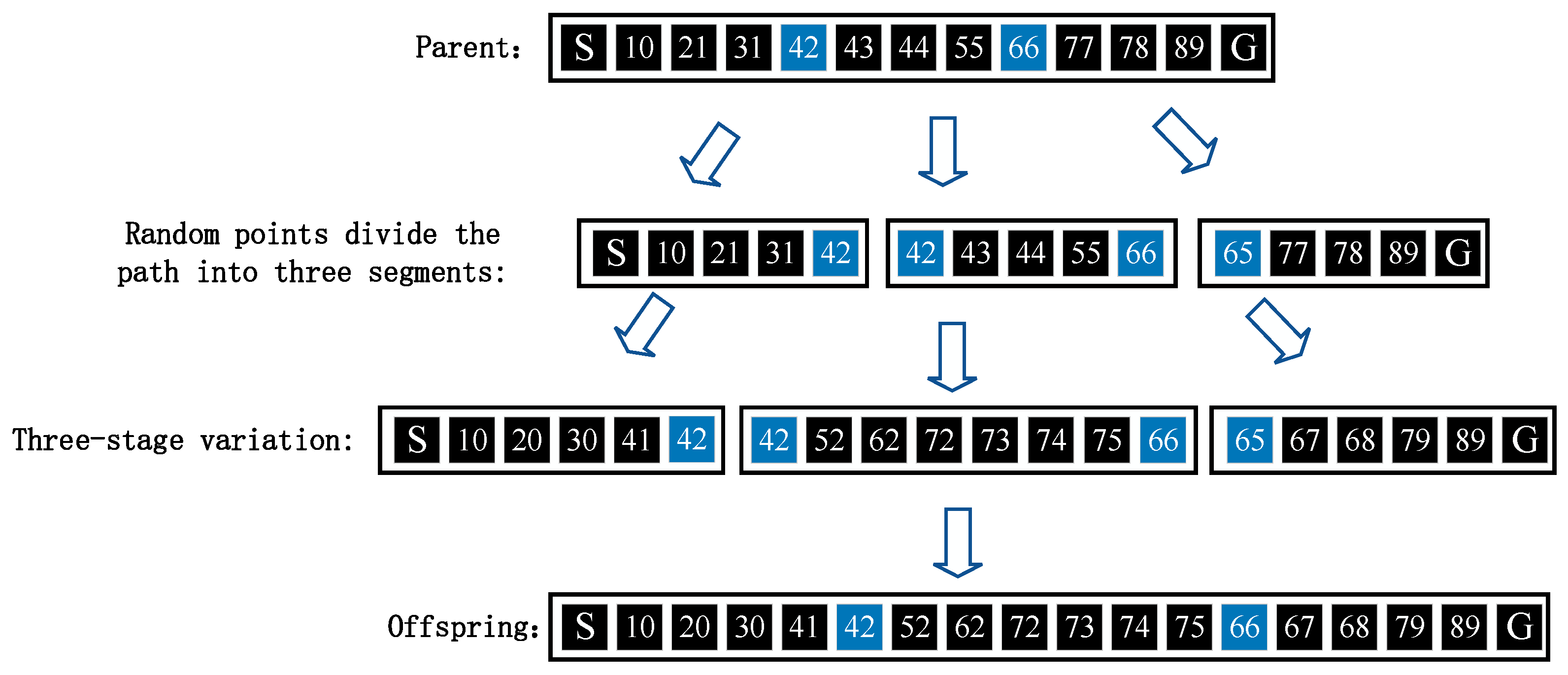
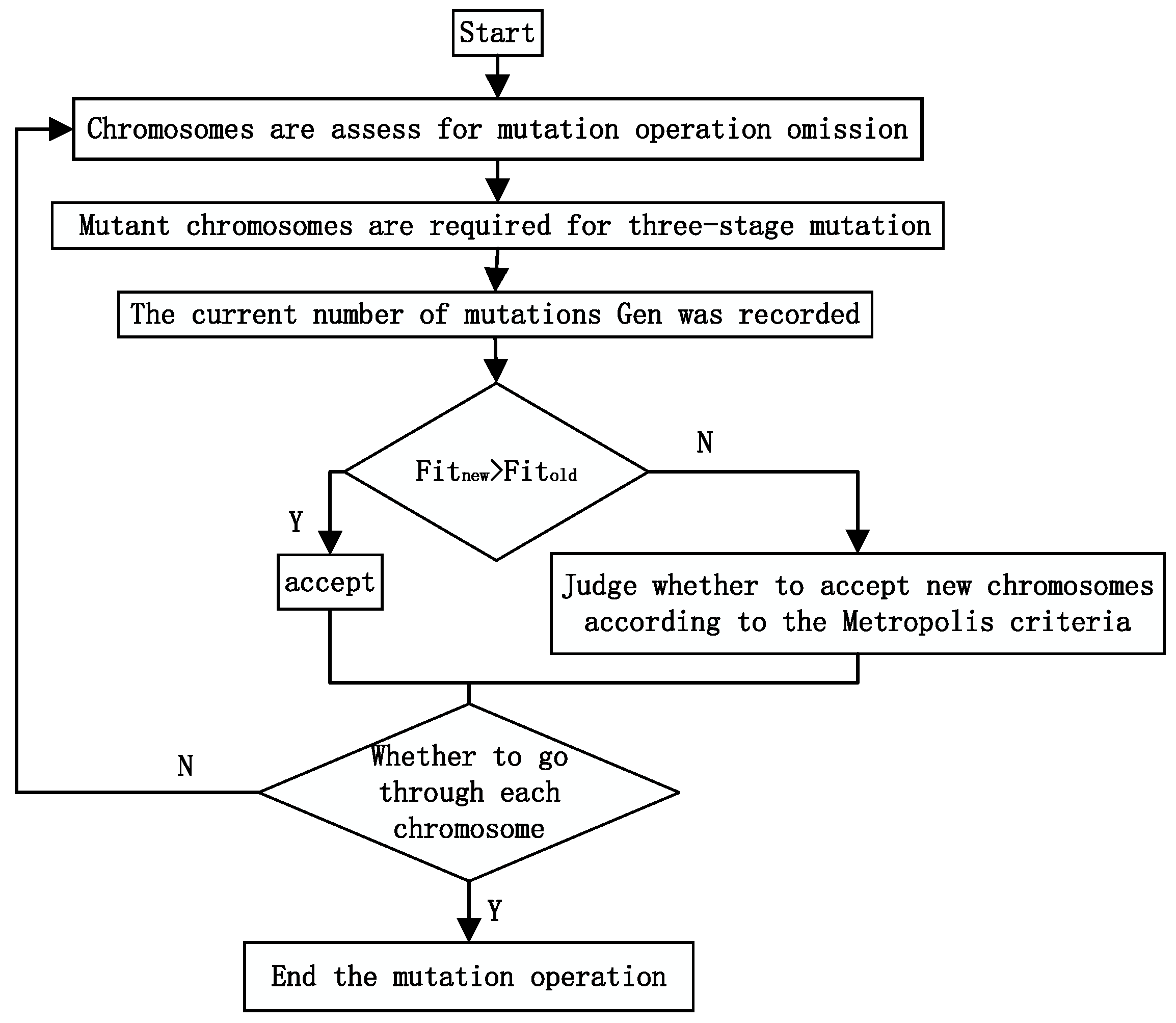
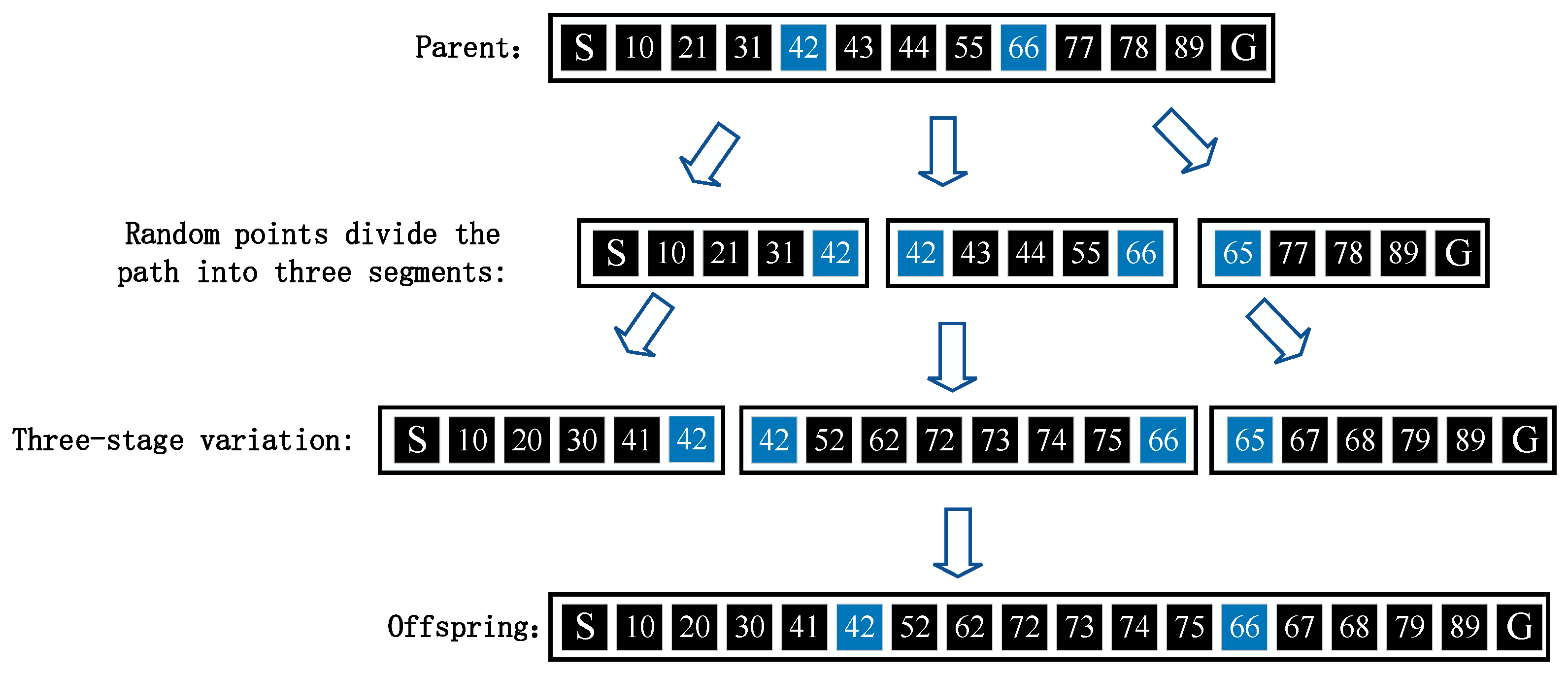
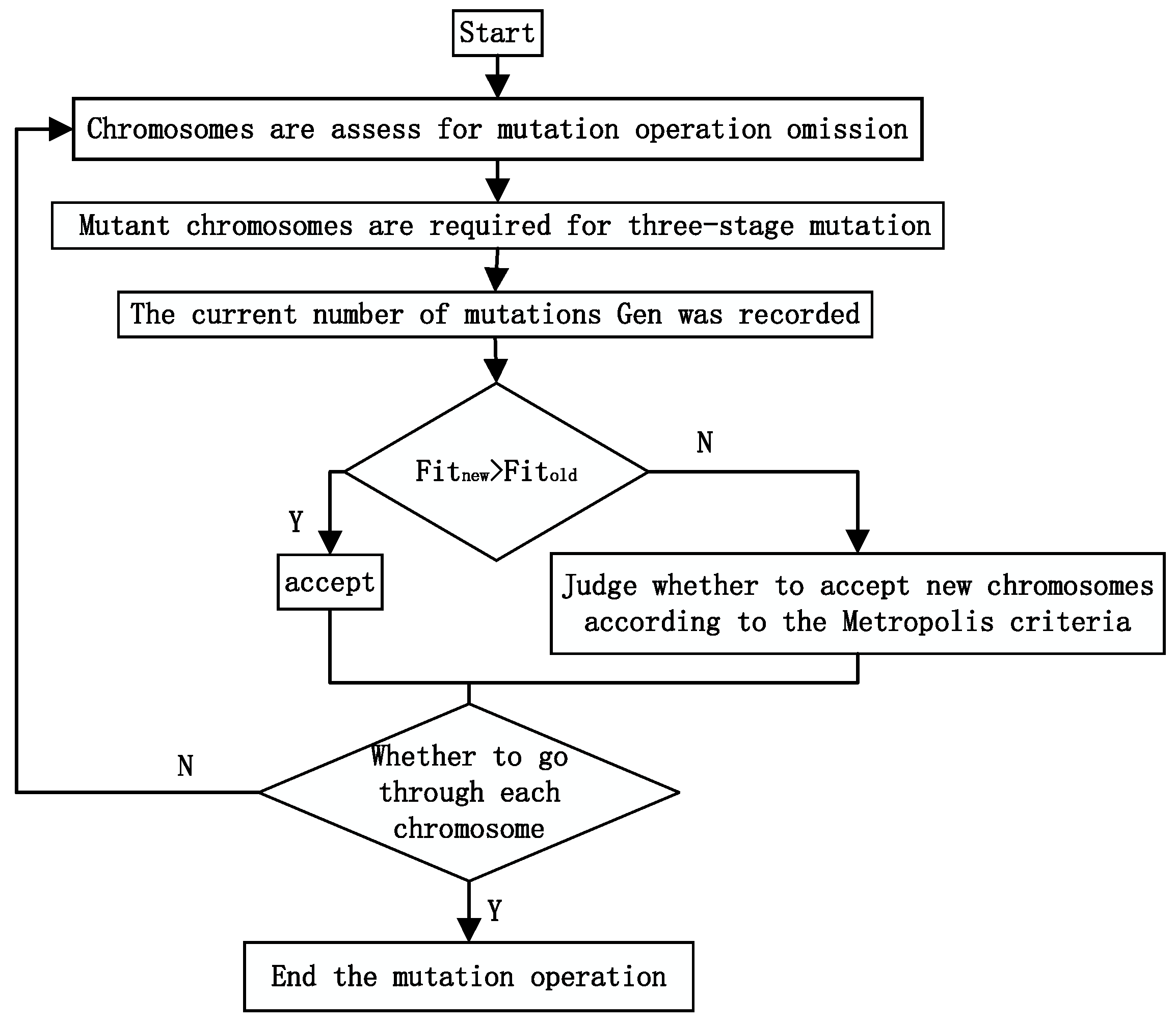
3.4.3. Simulated Annealing Three-Stage Mutation
- (1)
- Use to determine whether the current chromosome should be mutated. If > random number r, then mutation occurs.
- (2)
- Randomly select two nodes and (excluding S and G points) from the parent individual to be mutated.
- (3)
- These two random points divide the parent individual into three segments. Reinitializing these three segments results in a mutated chromosome.
3.4.4. Deletion Operator
- (1)
- (2)
- Next, evaluate the connectivity between S and . As shown in the figure, there is an obstacle between these two points, so is retained.
- (3)
- The process is repeated using as a new reference point and applying the rules from the first two steps, until the evaluation reaches the final node.
3.5. Adaptive Adjustment of Crossover and Mutation
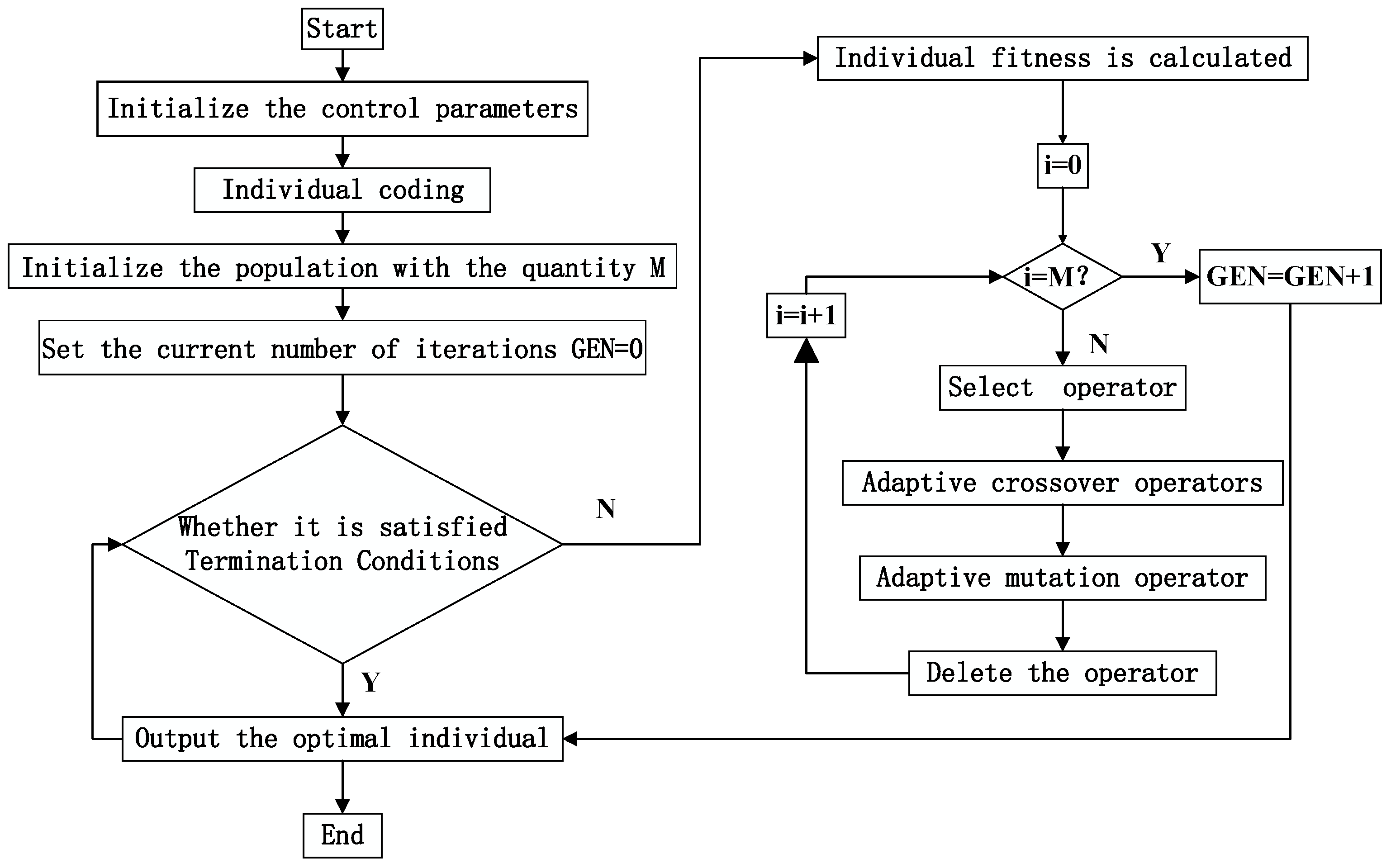
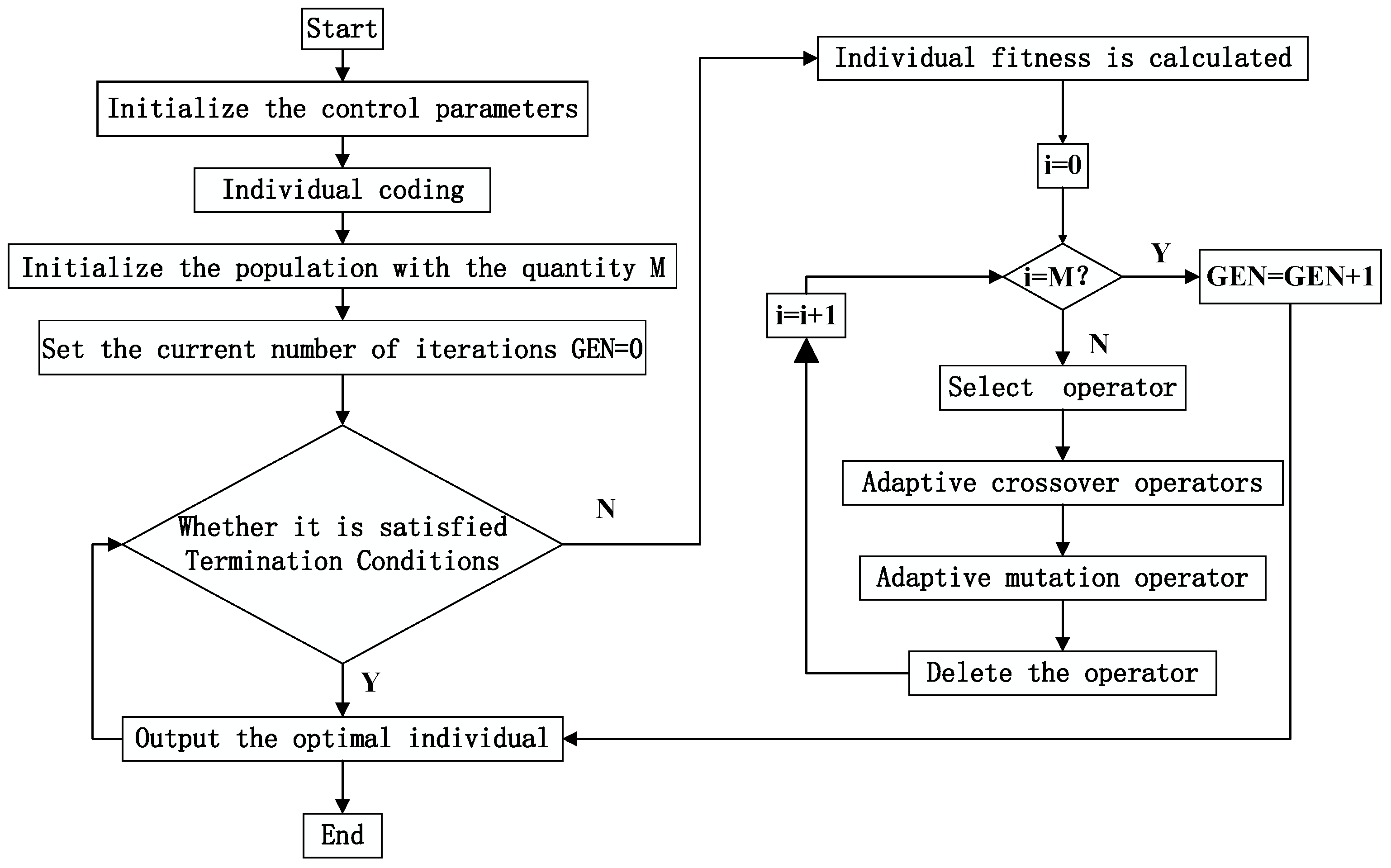
3.6. Improved Flowchart
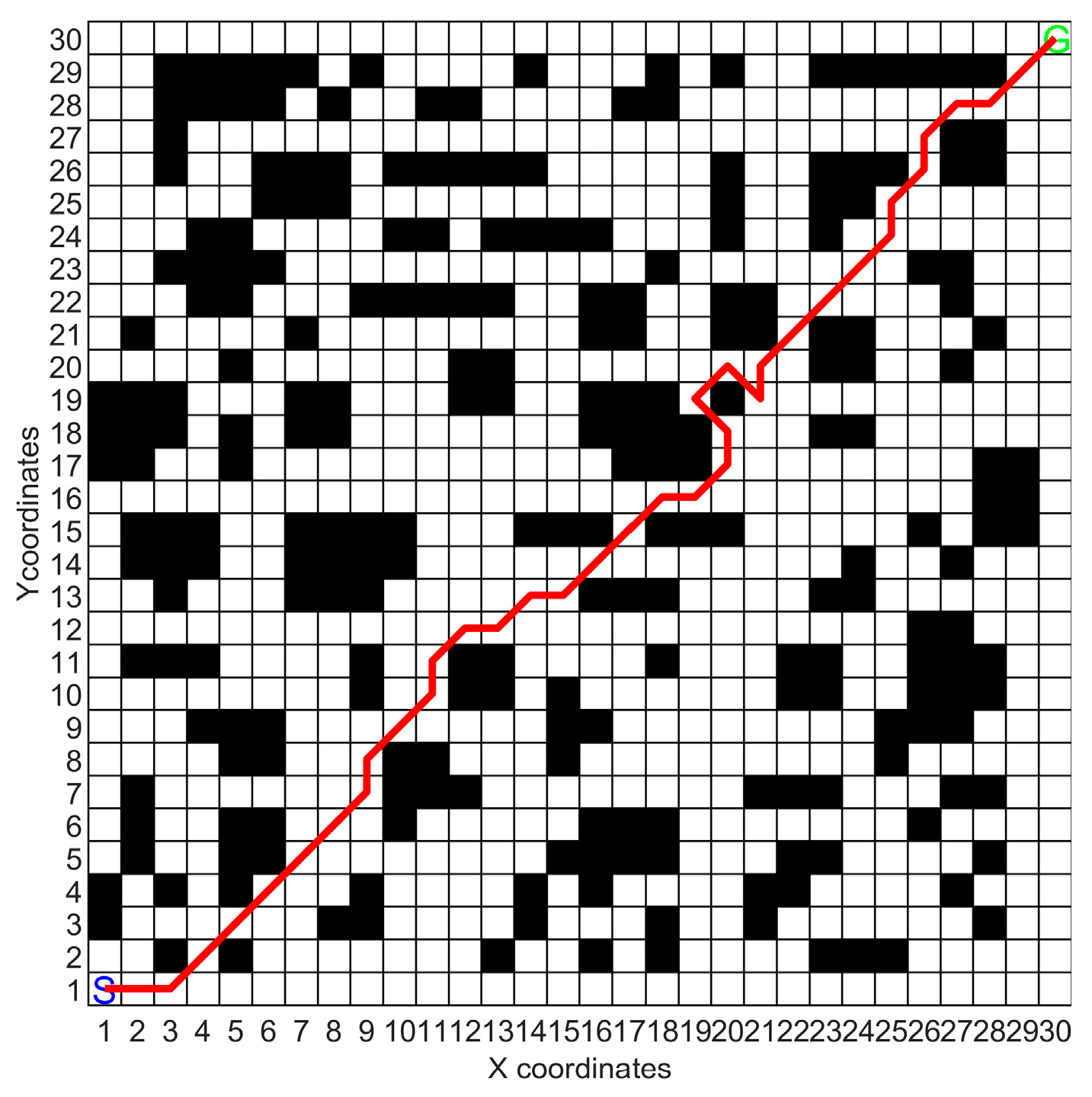
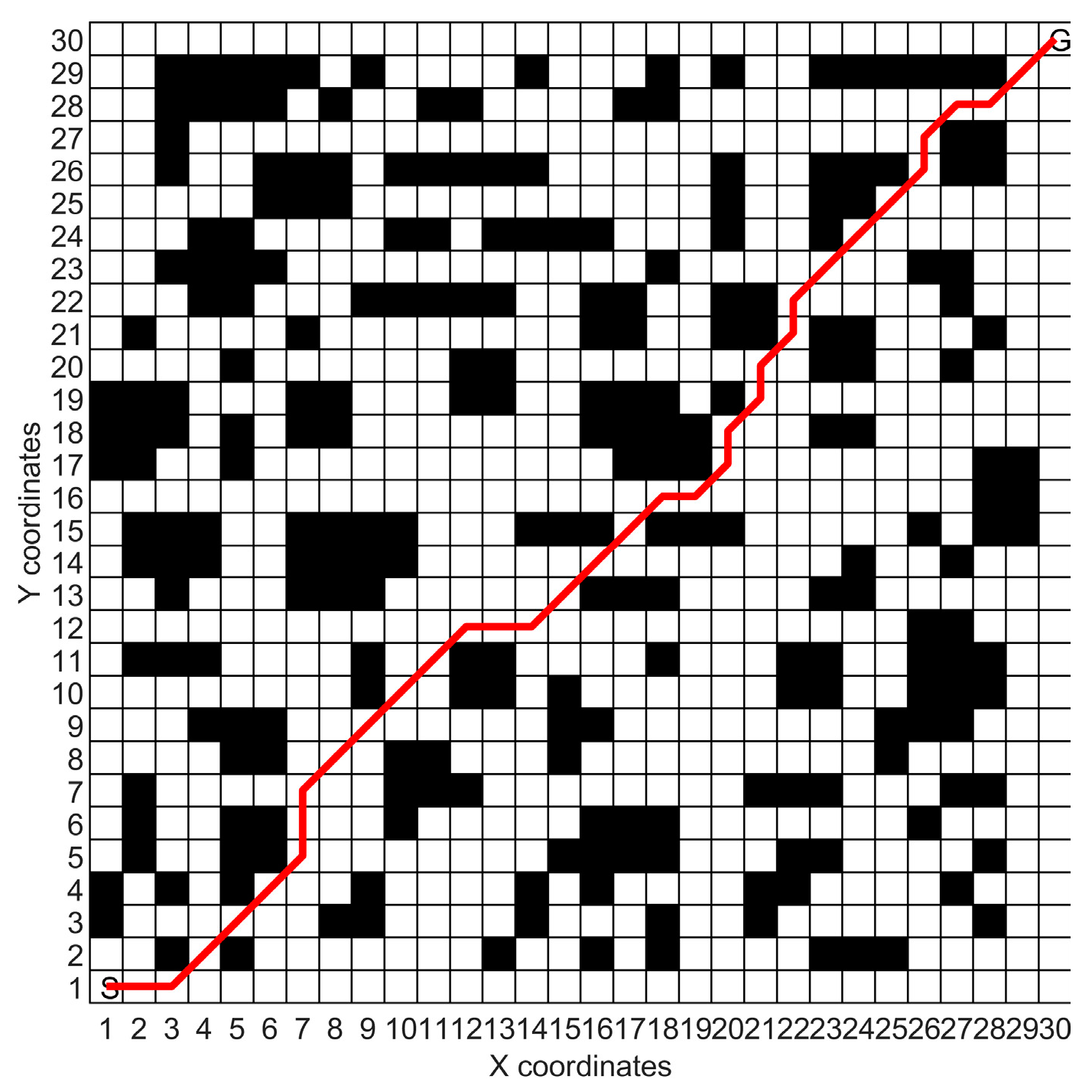
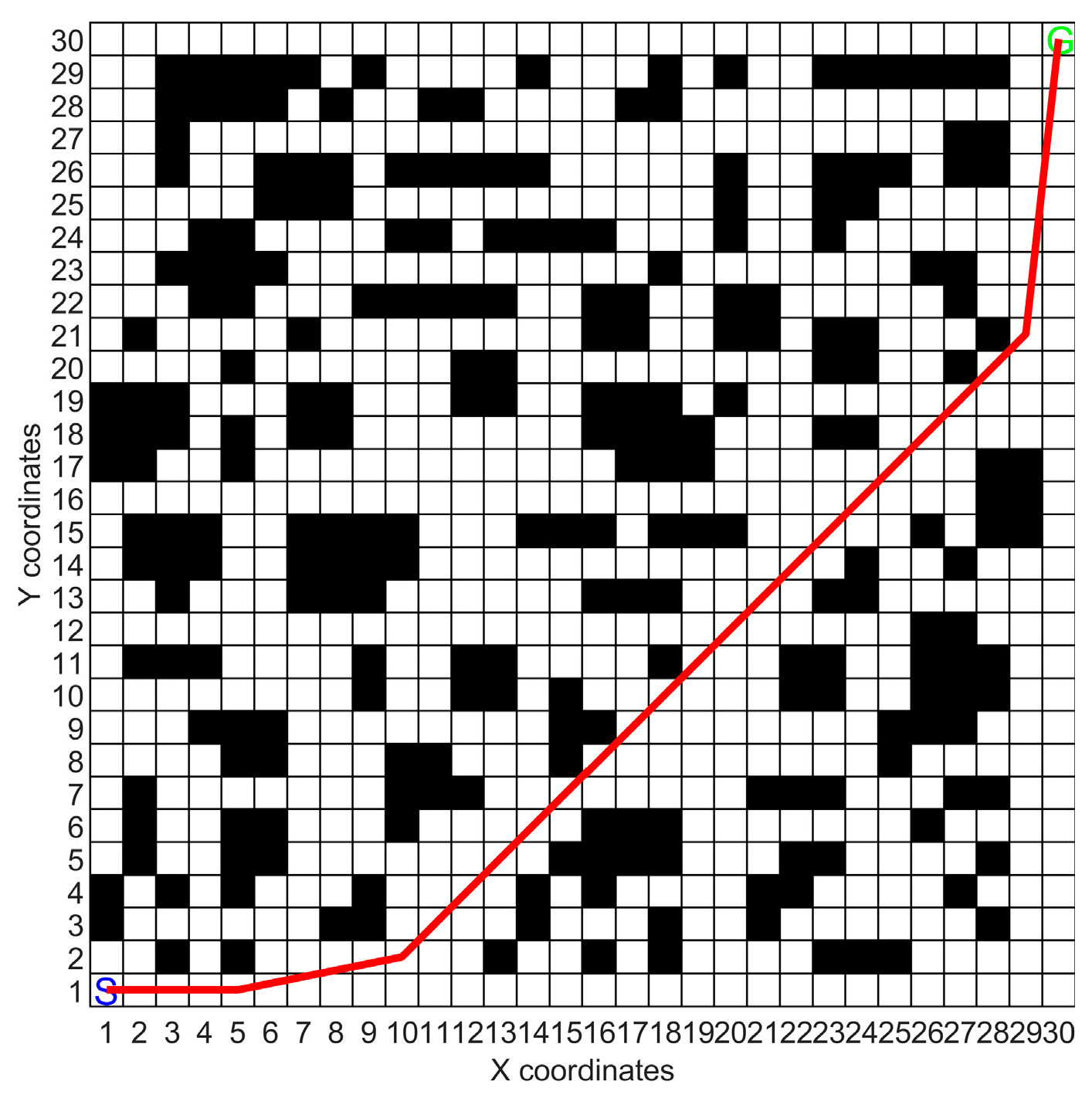
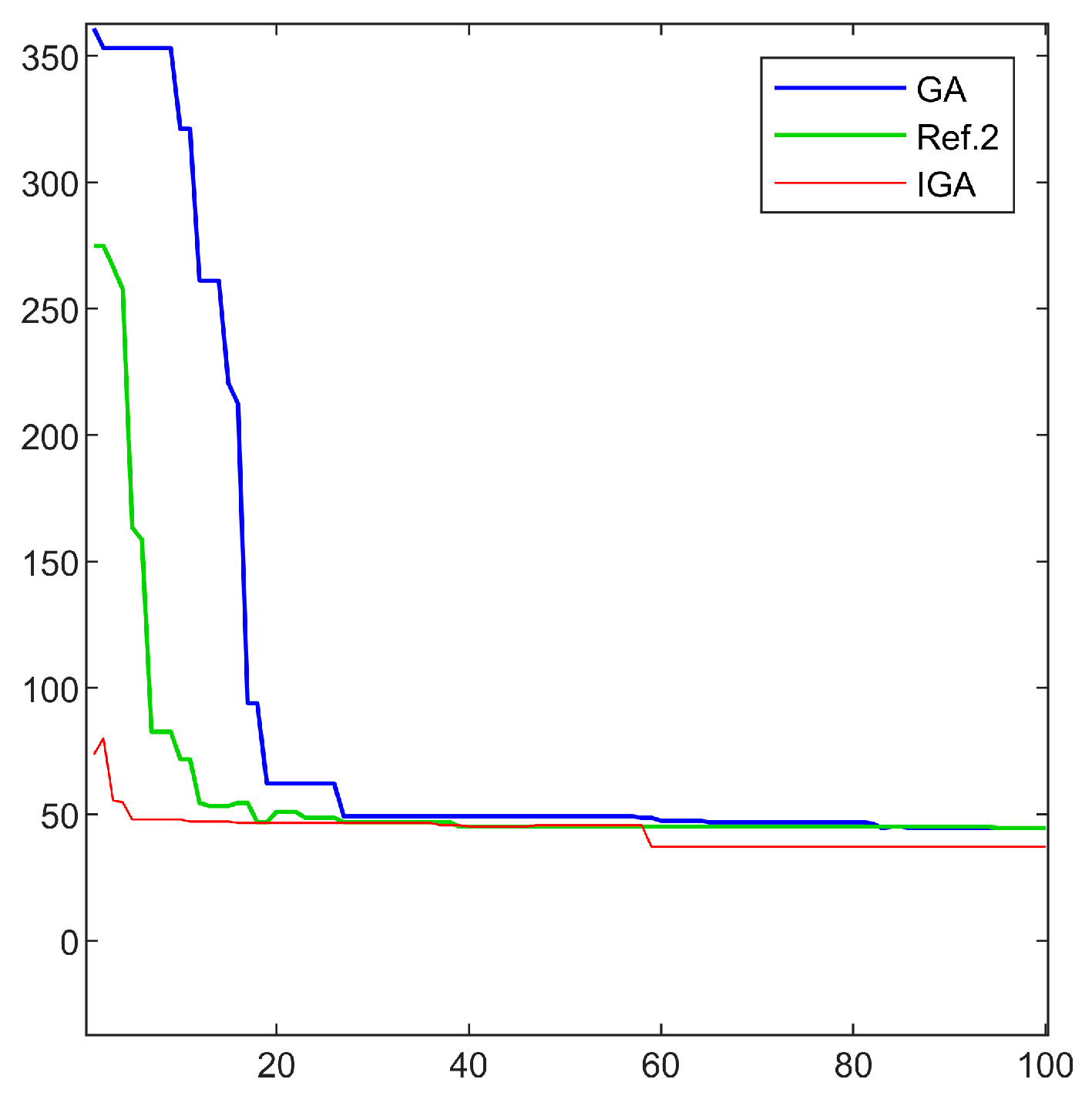
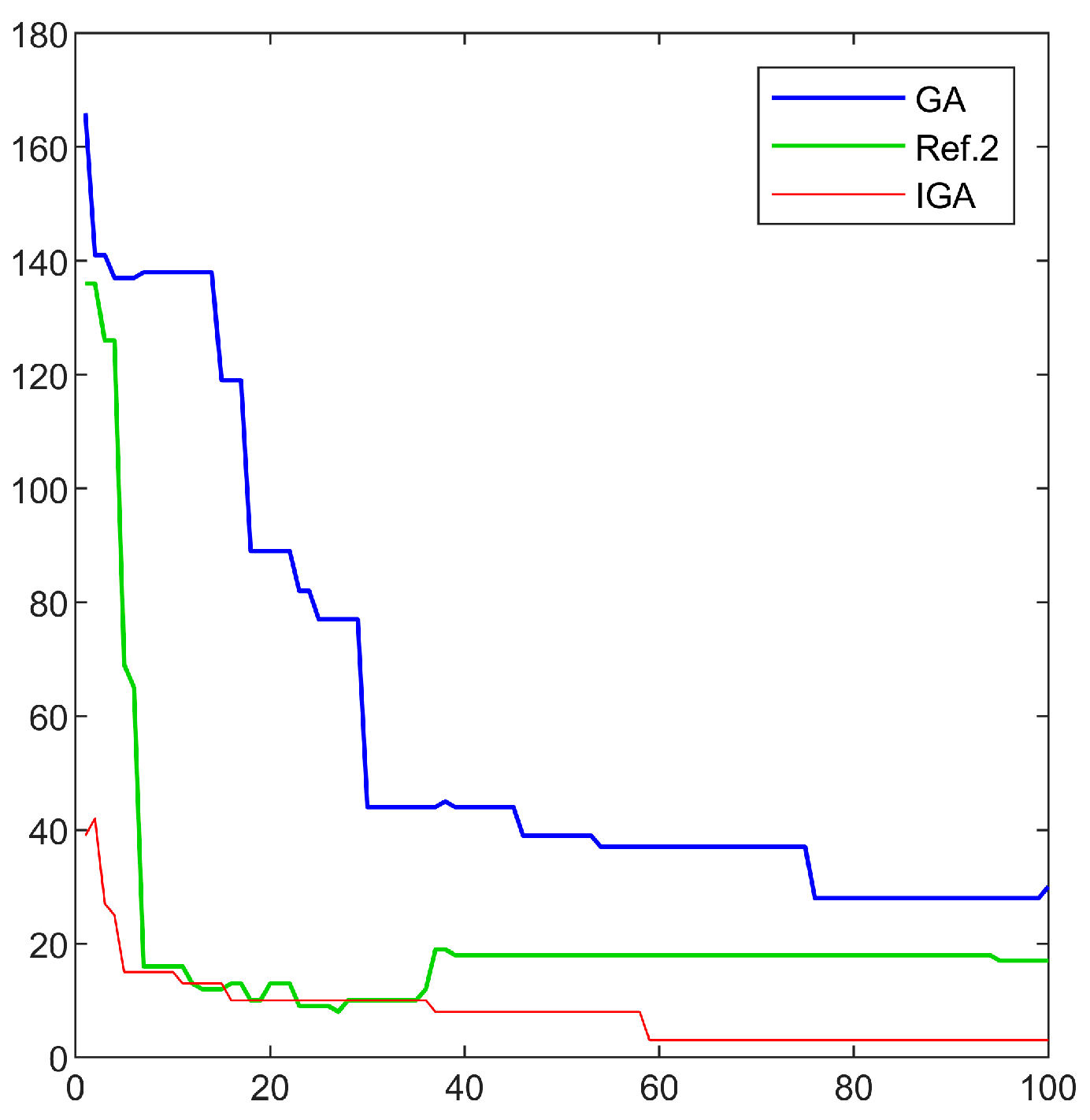
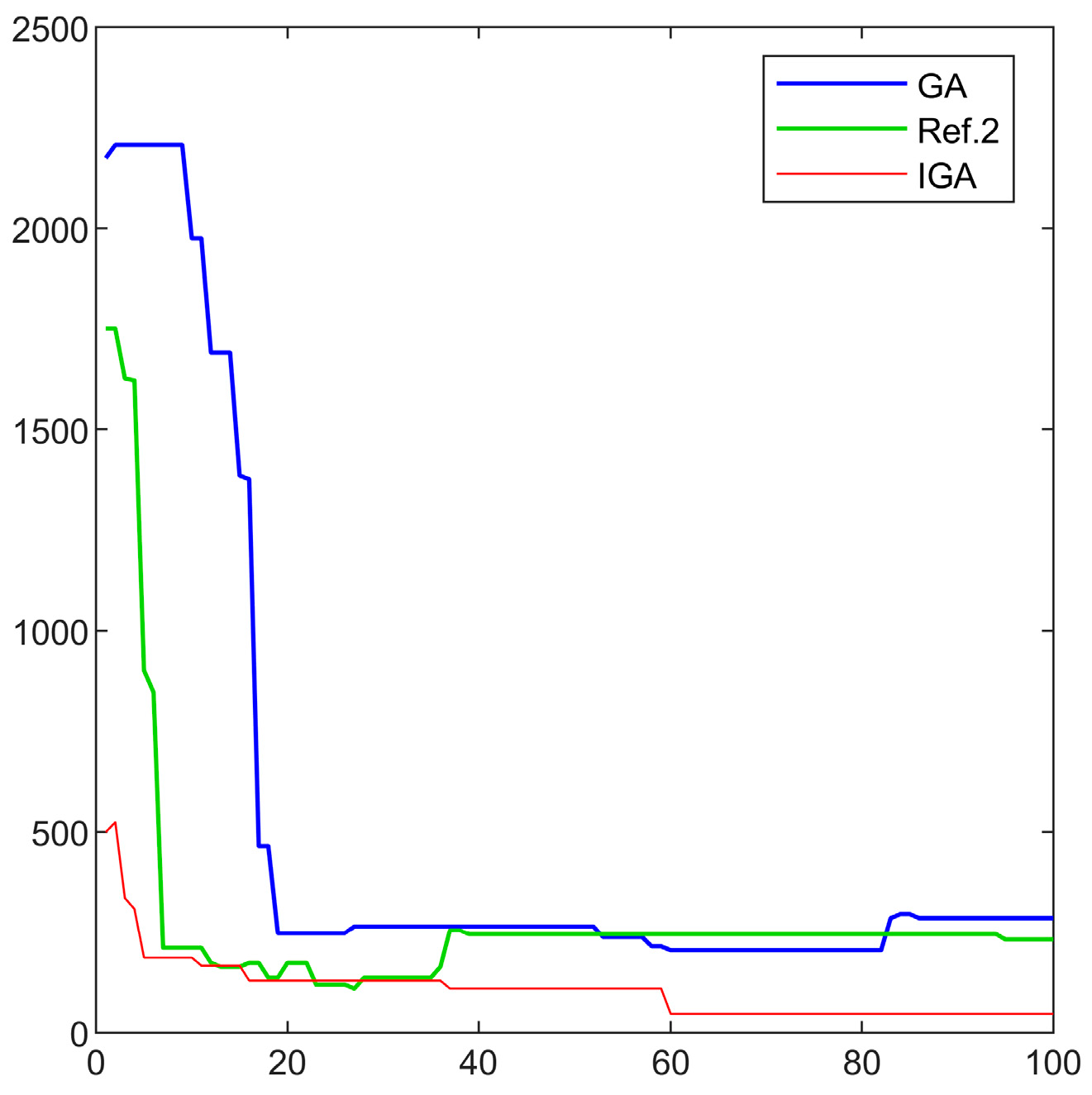
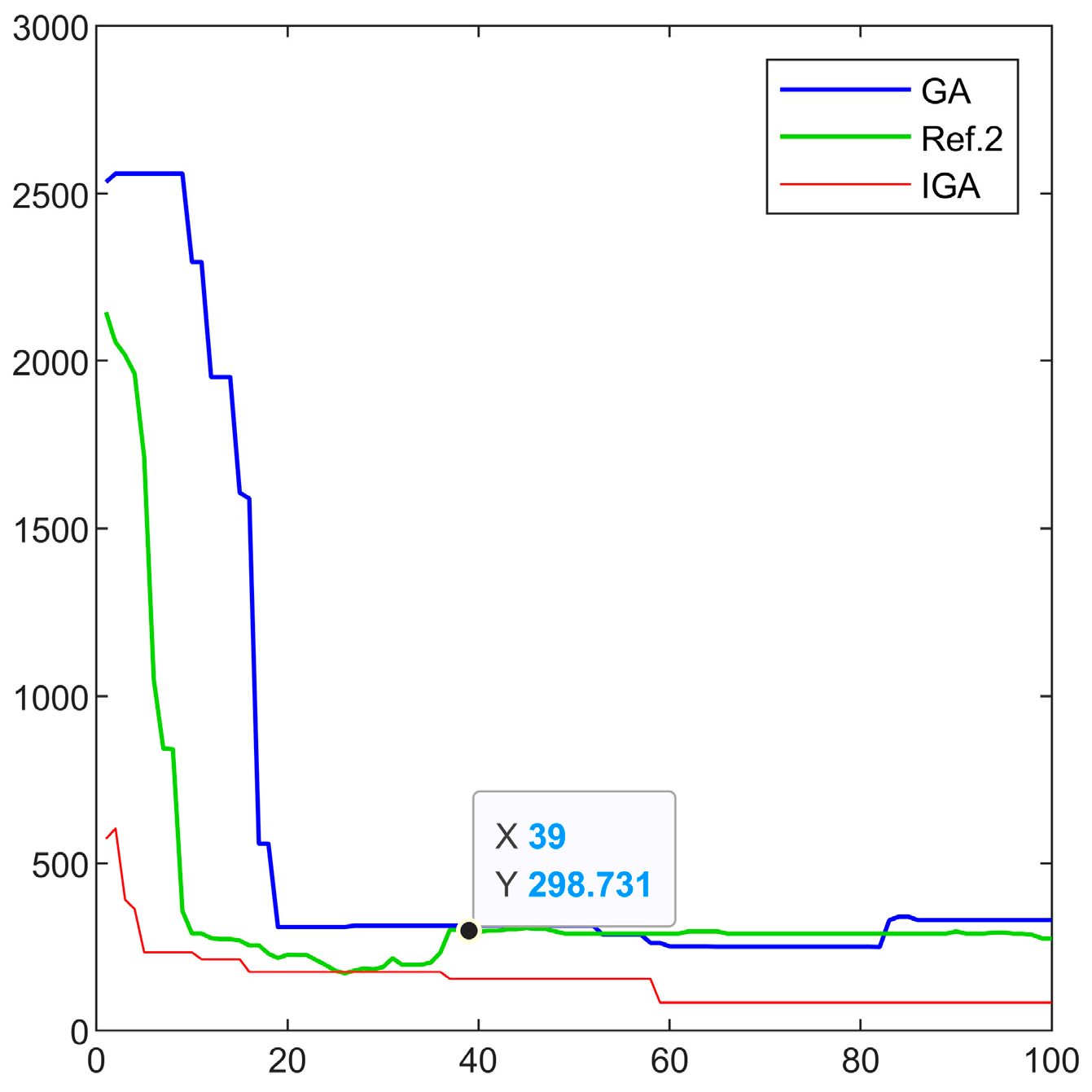
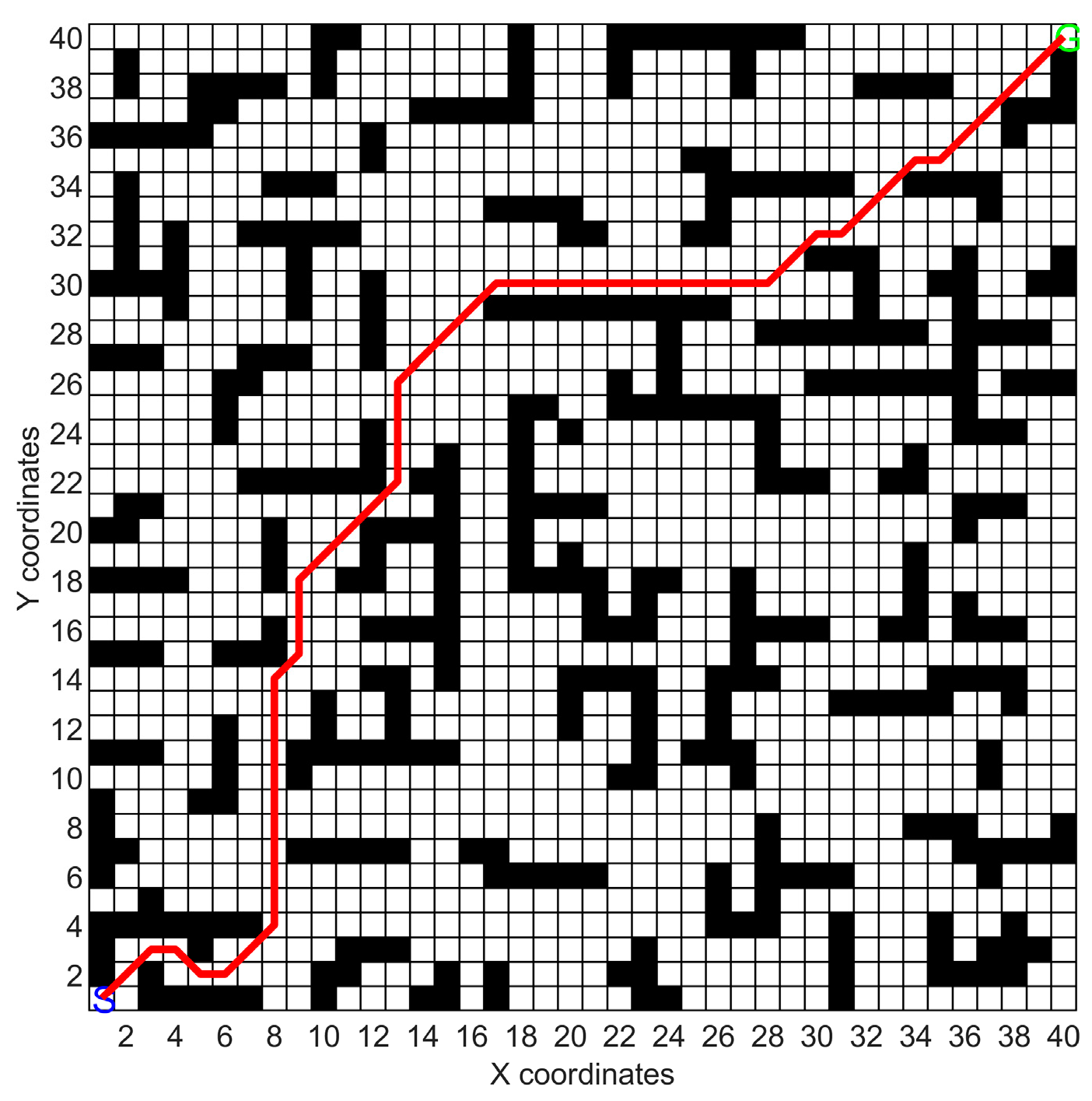
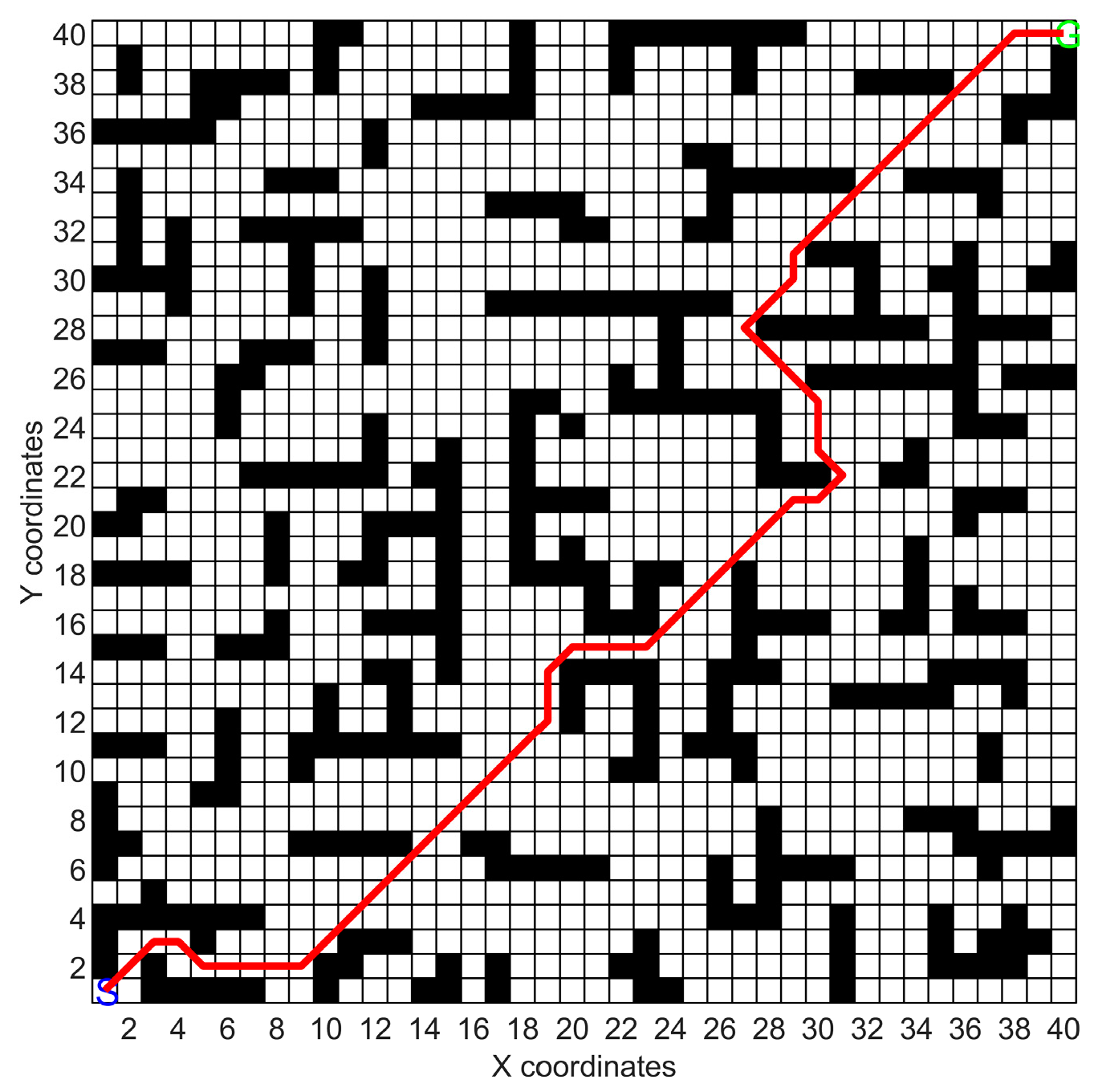
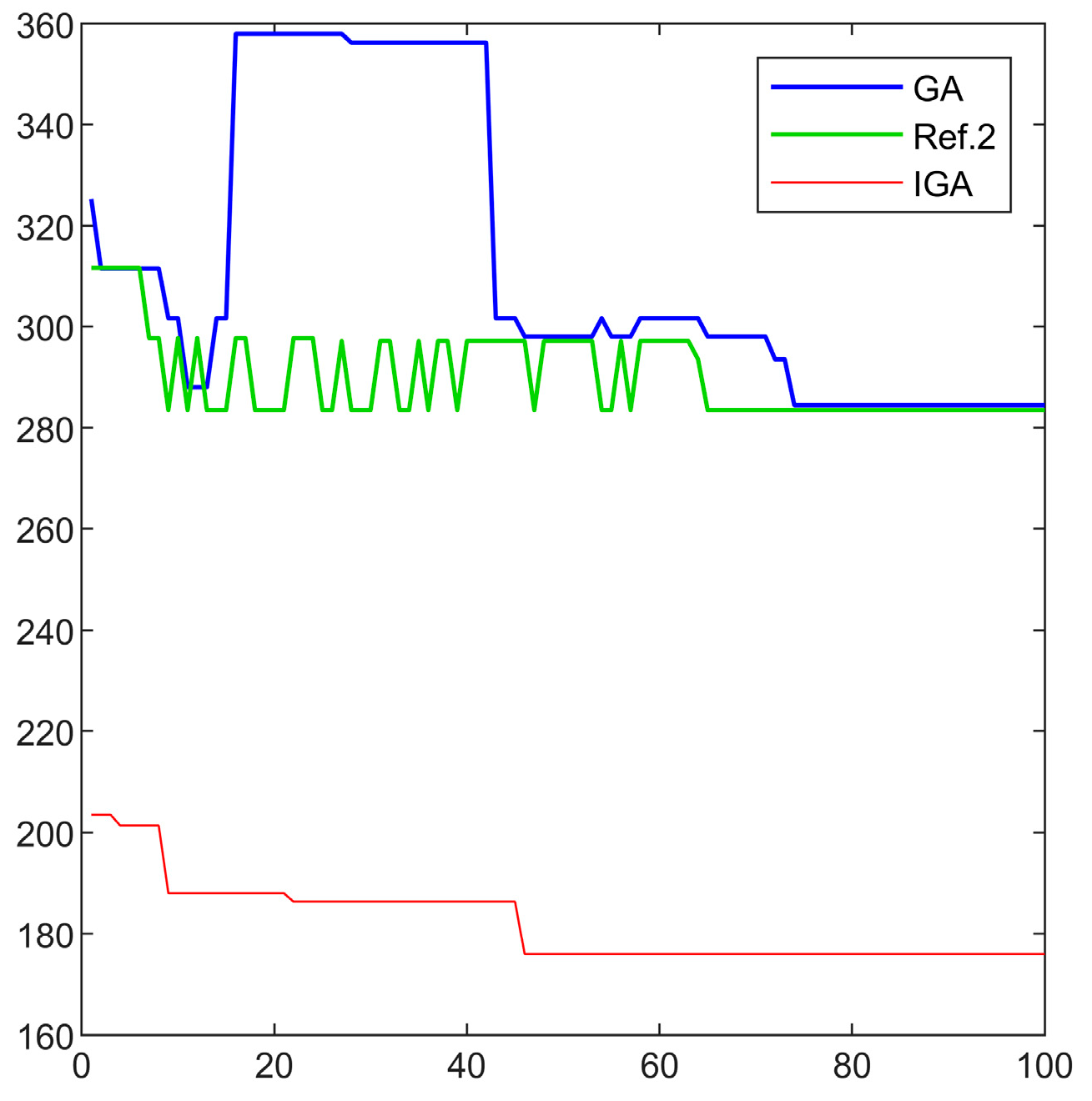
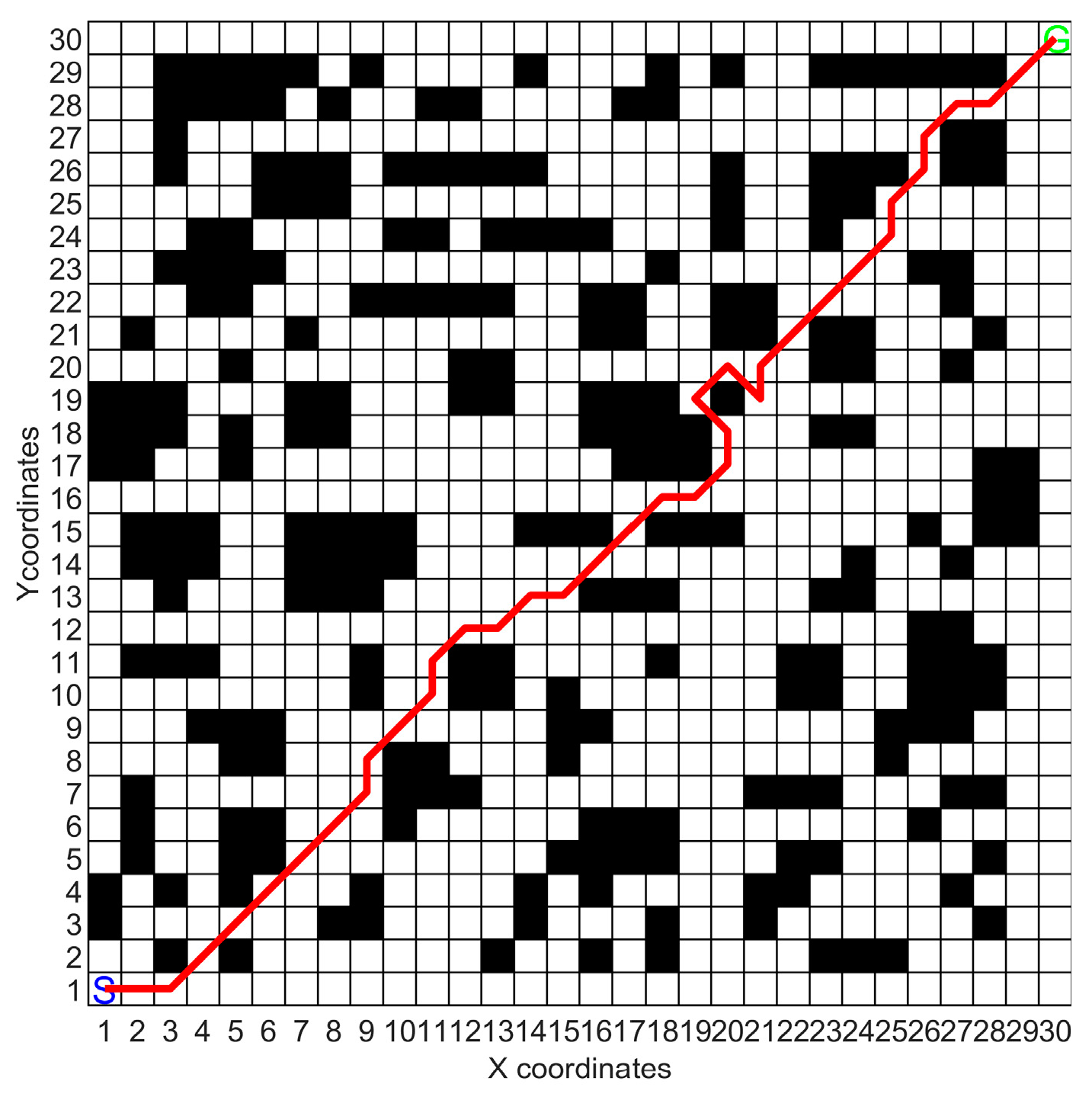
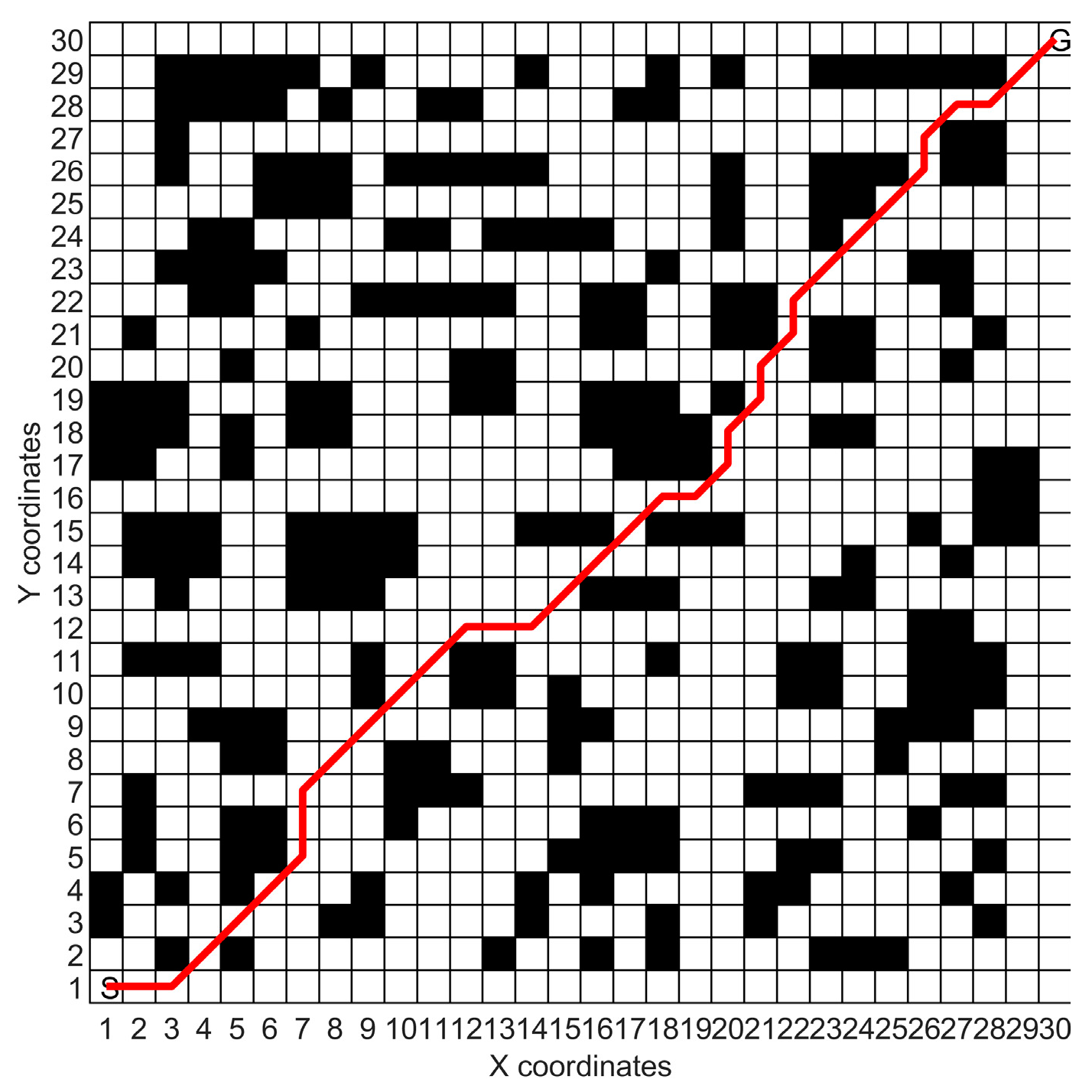
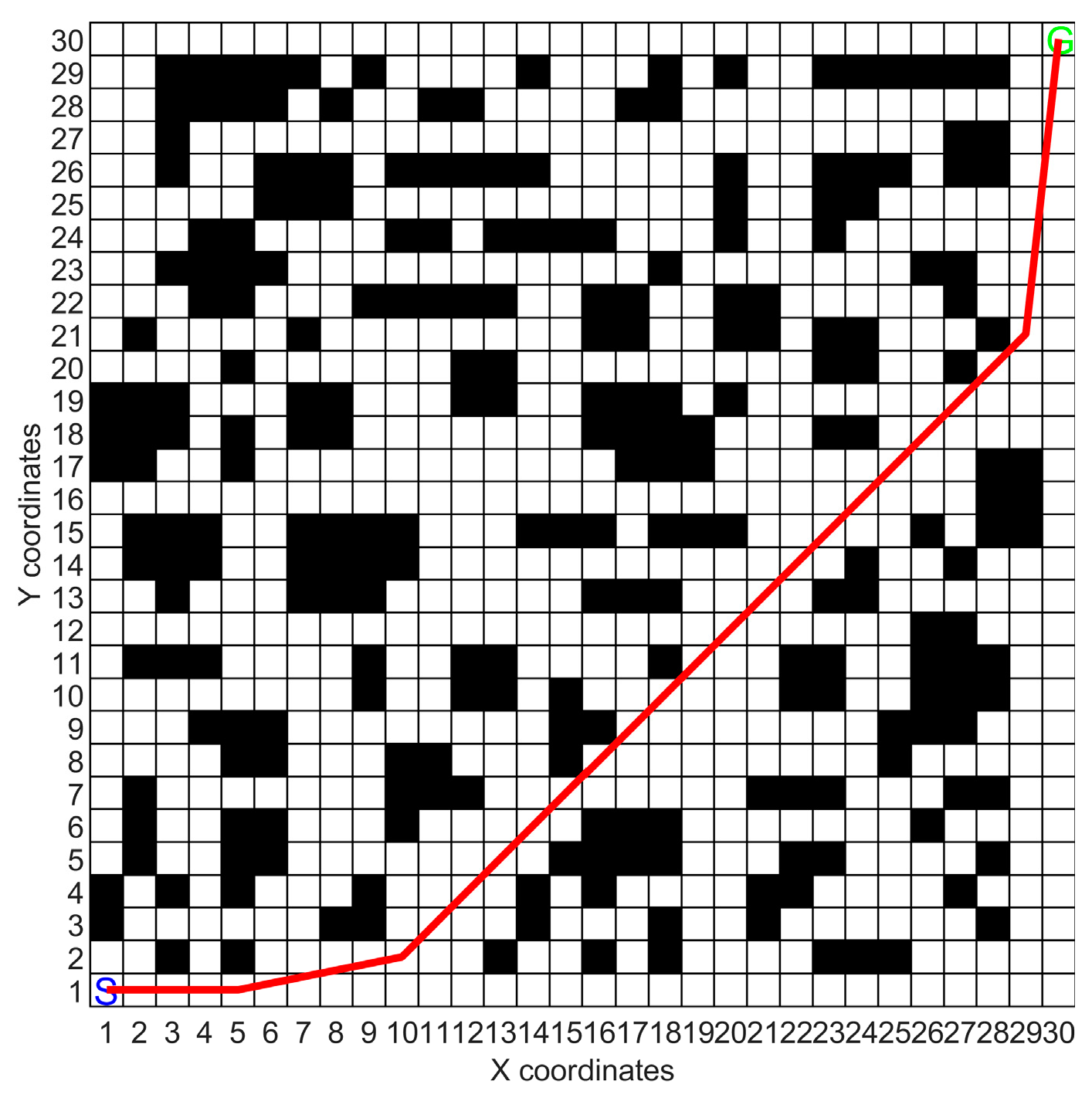
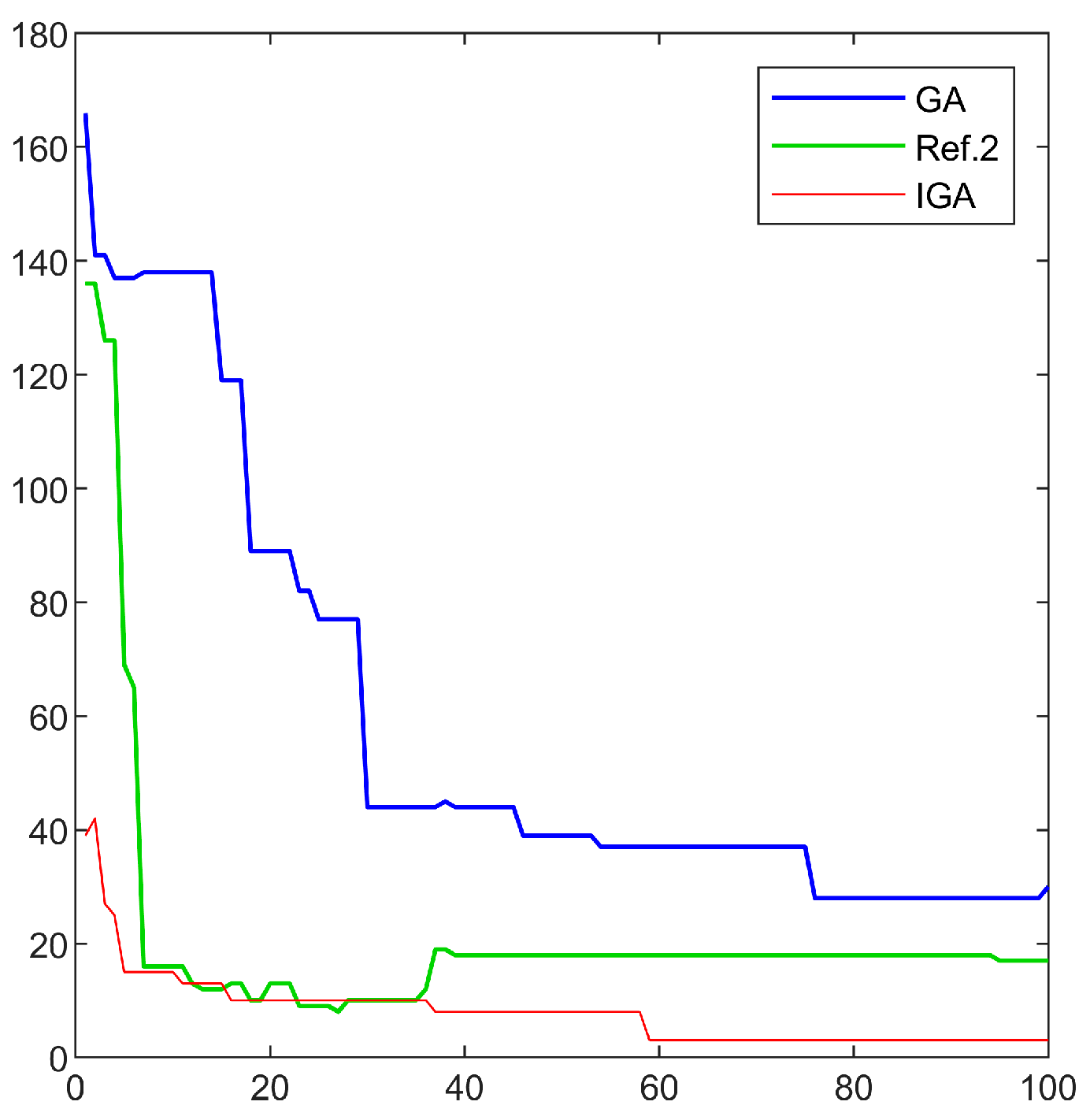
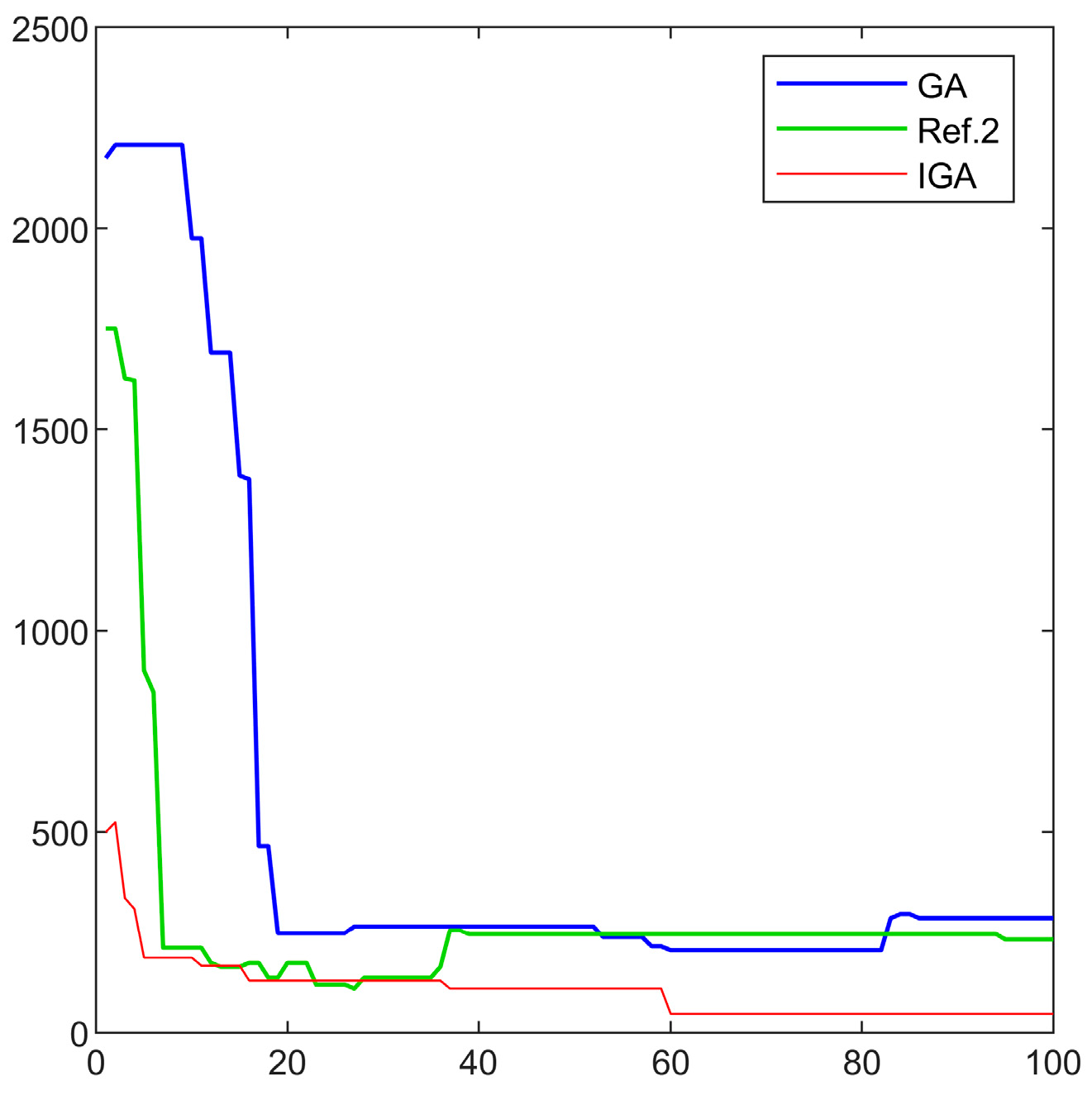
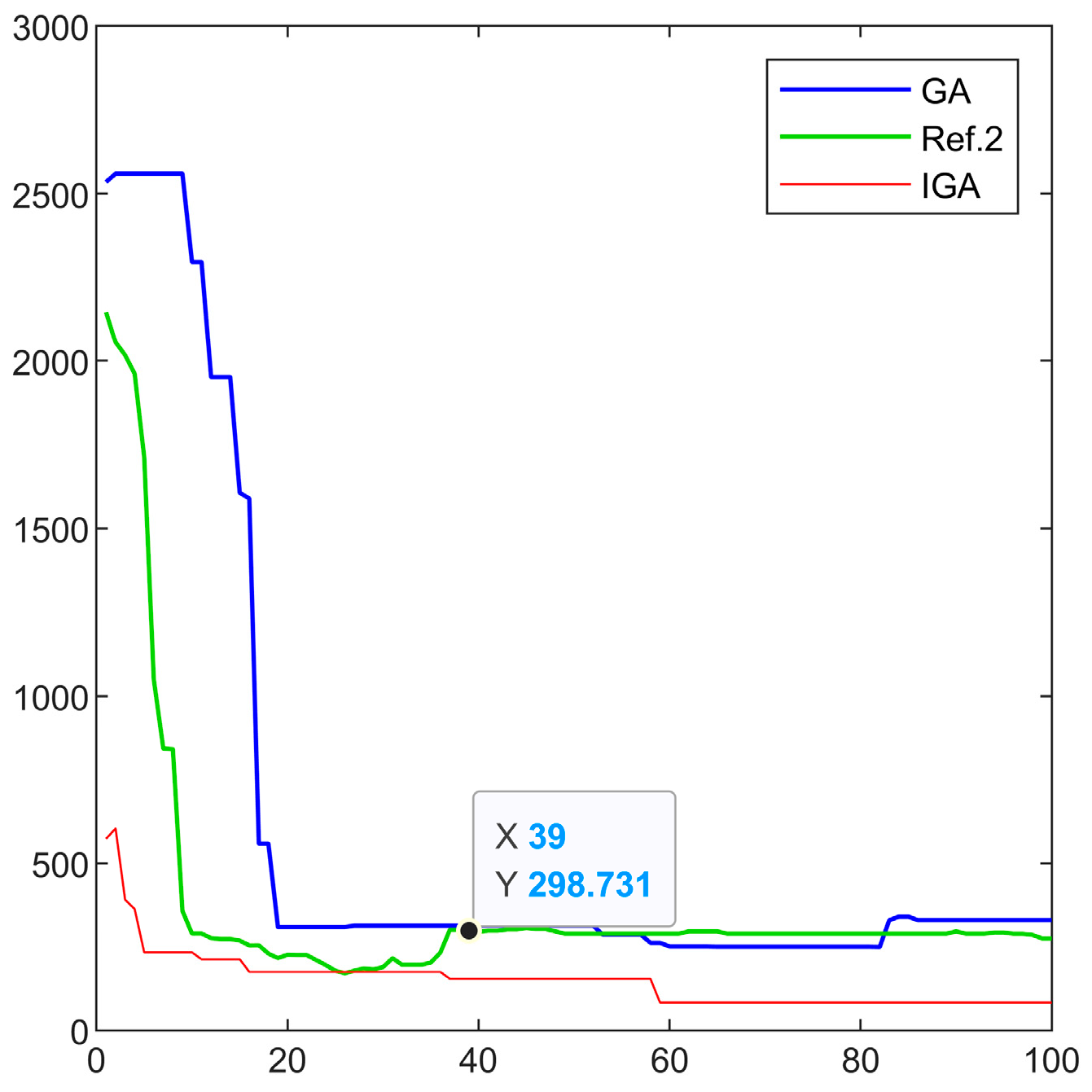
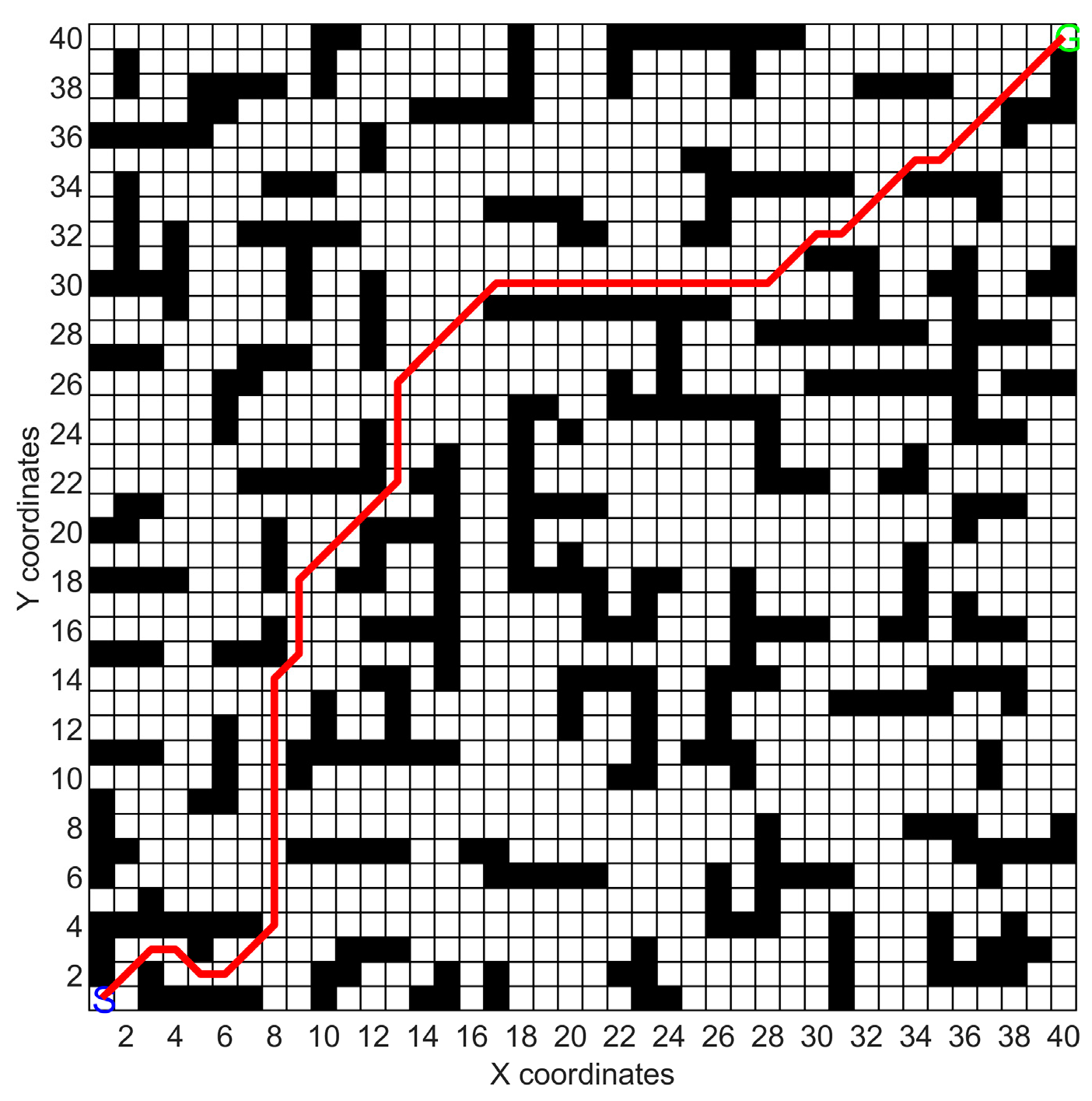
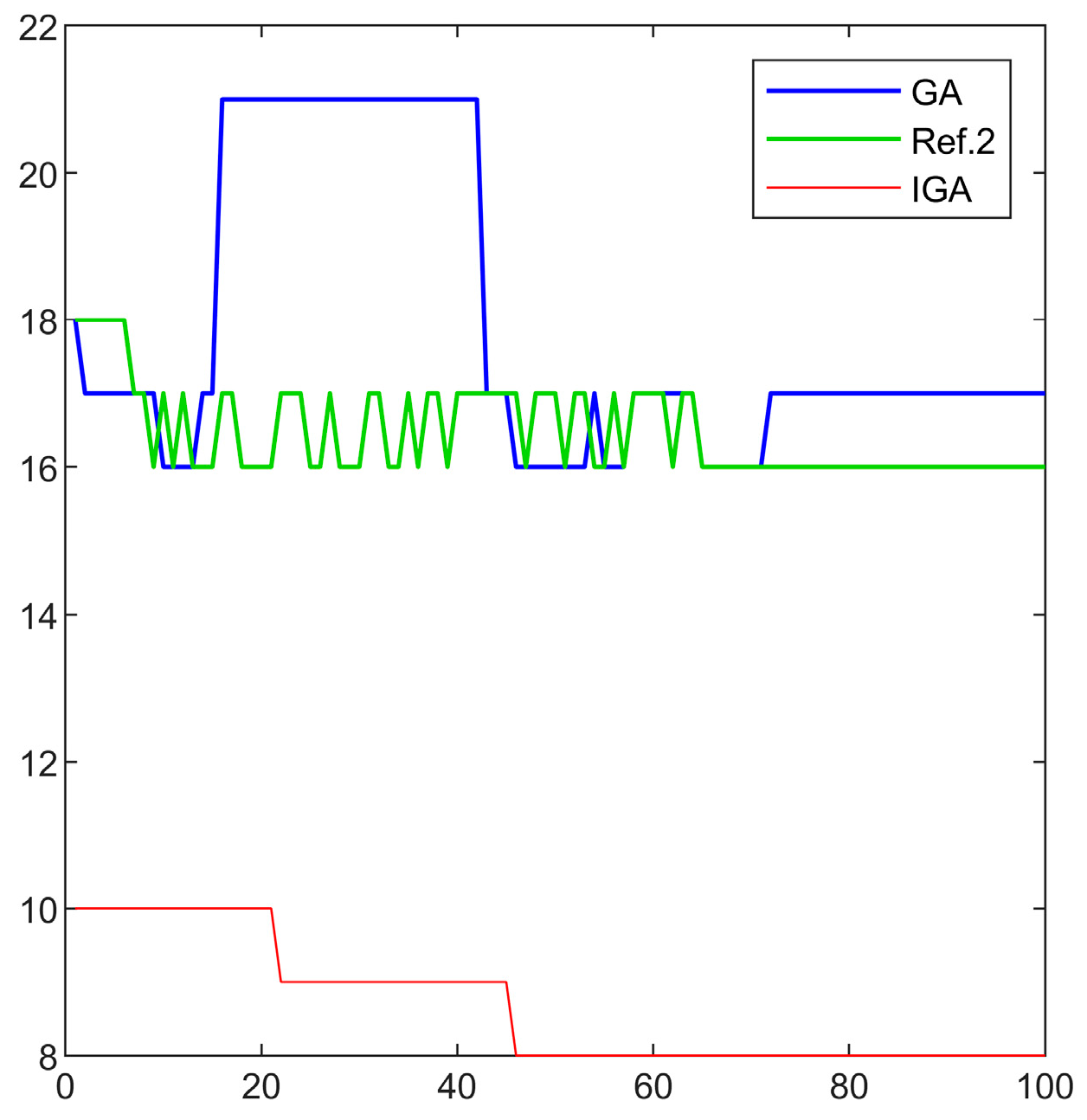
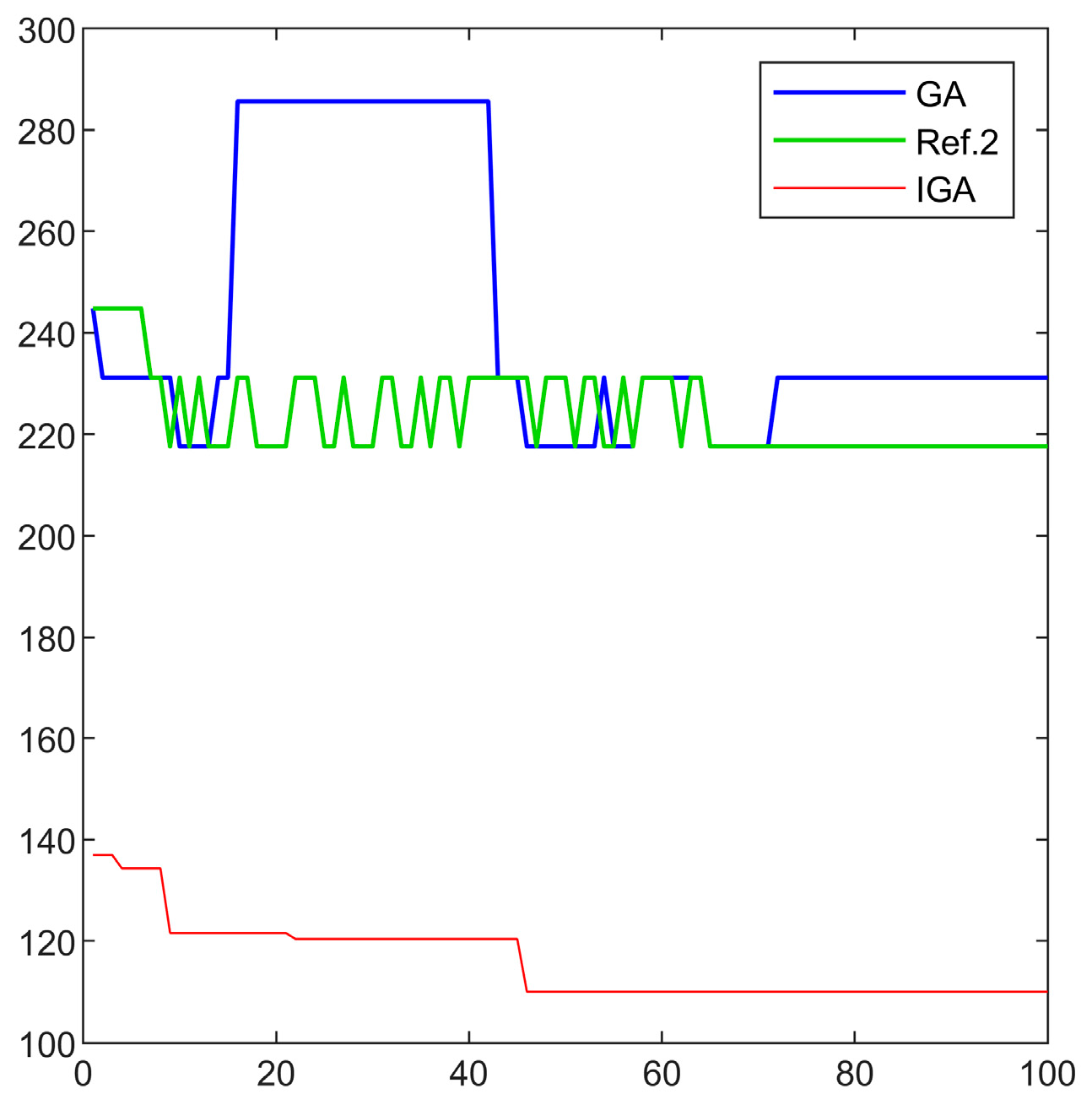
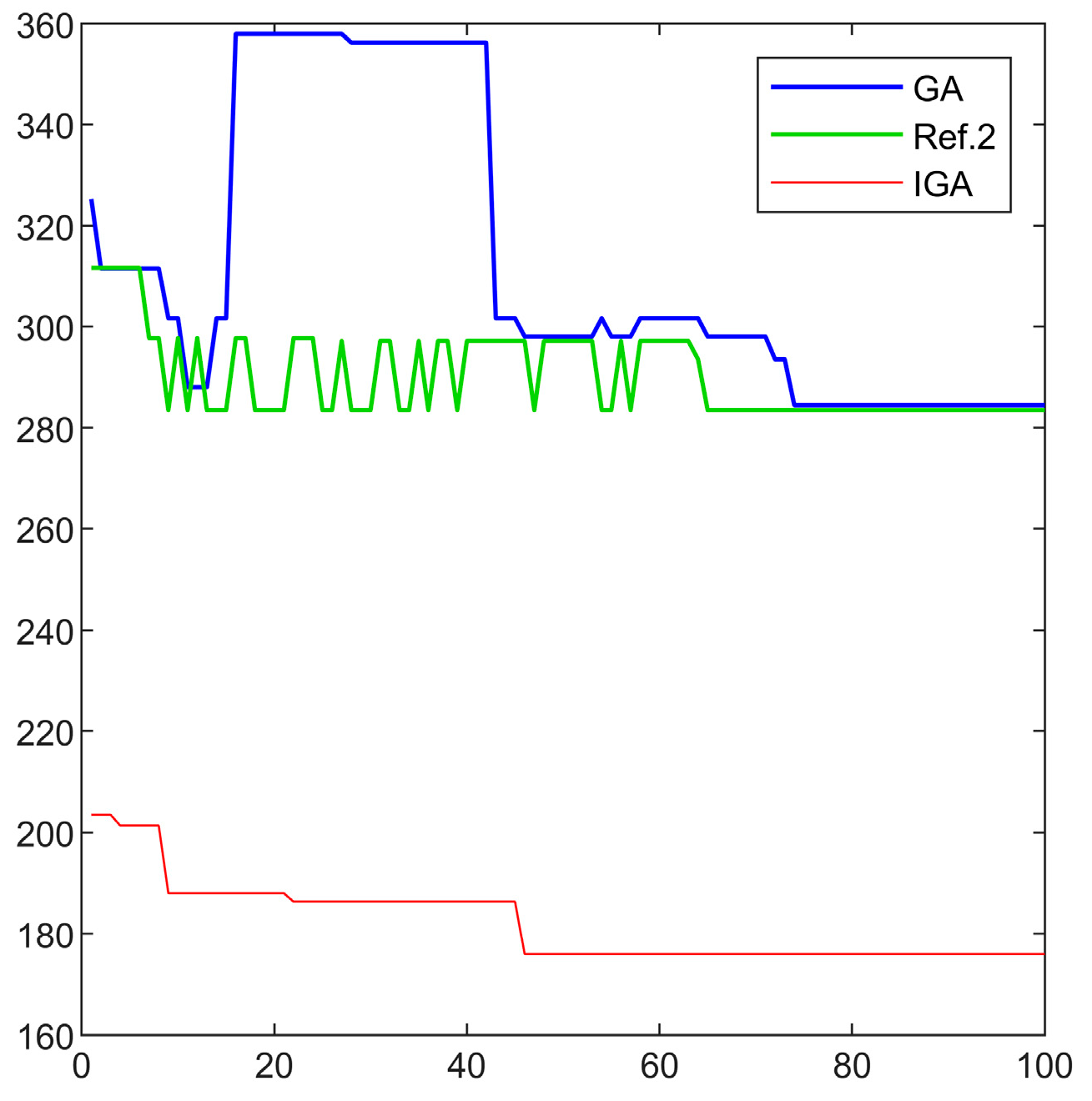
4. Simulation and Results Analysis
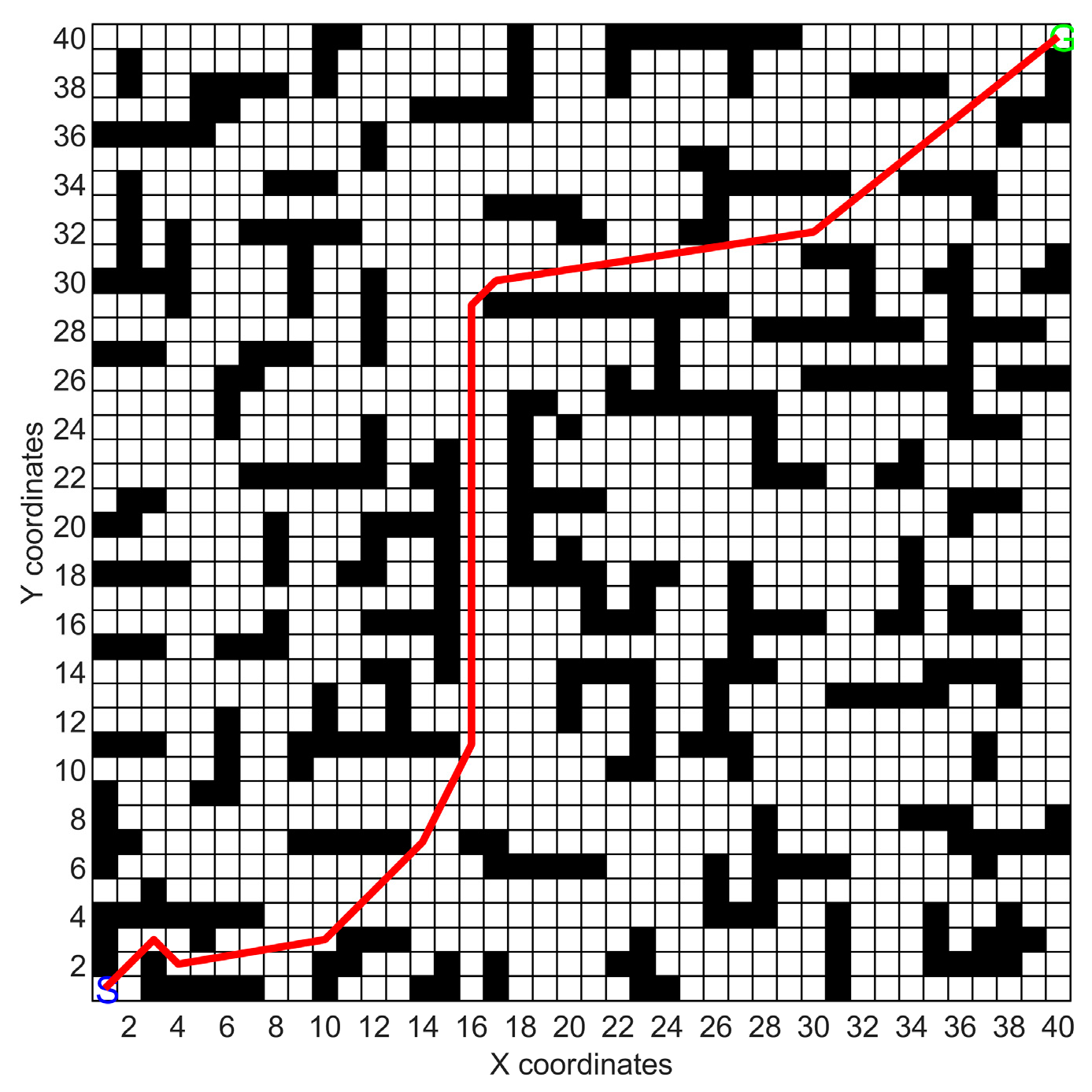
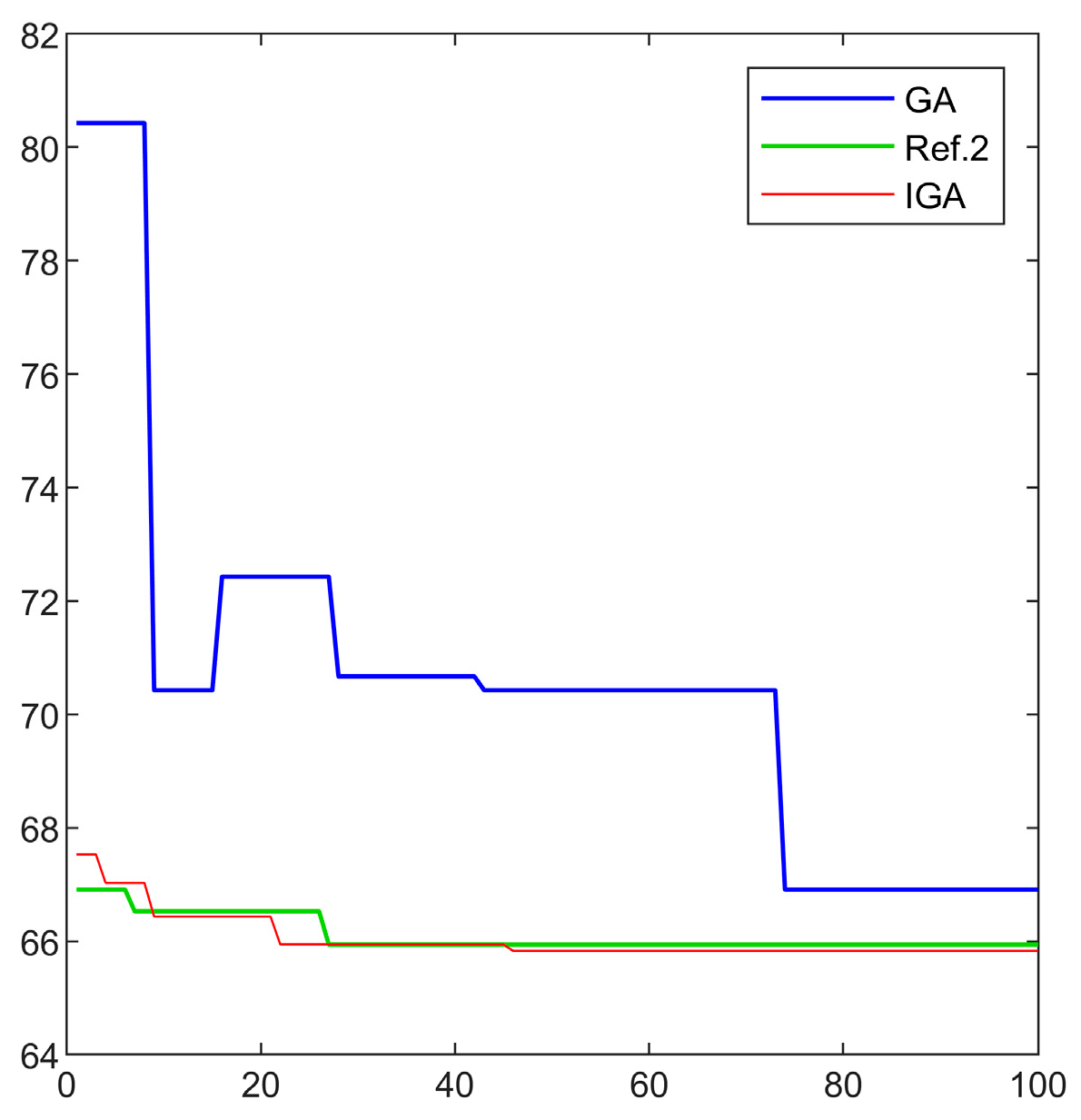
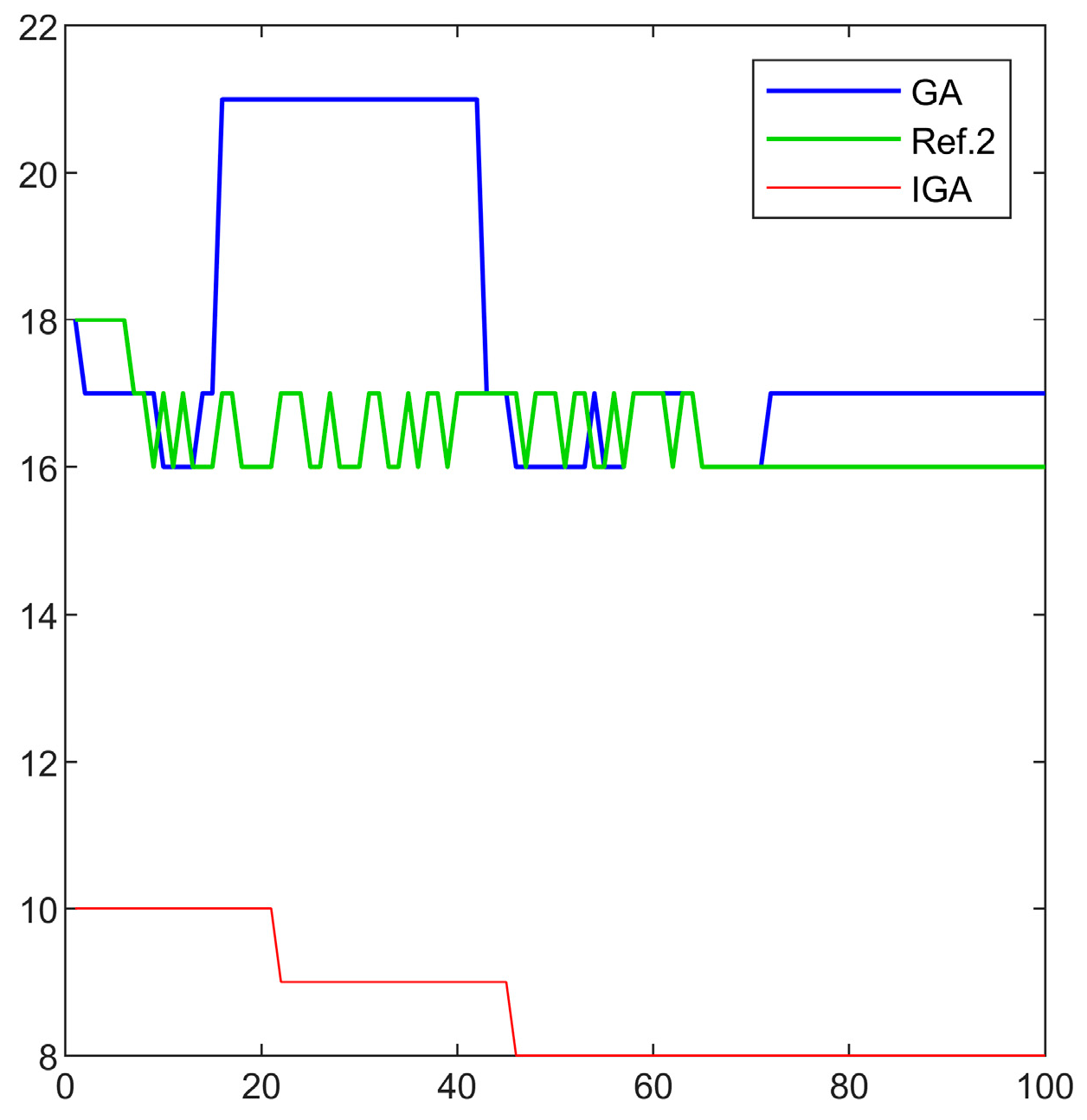
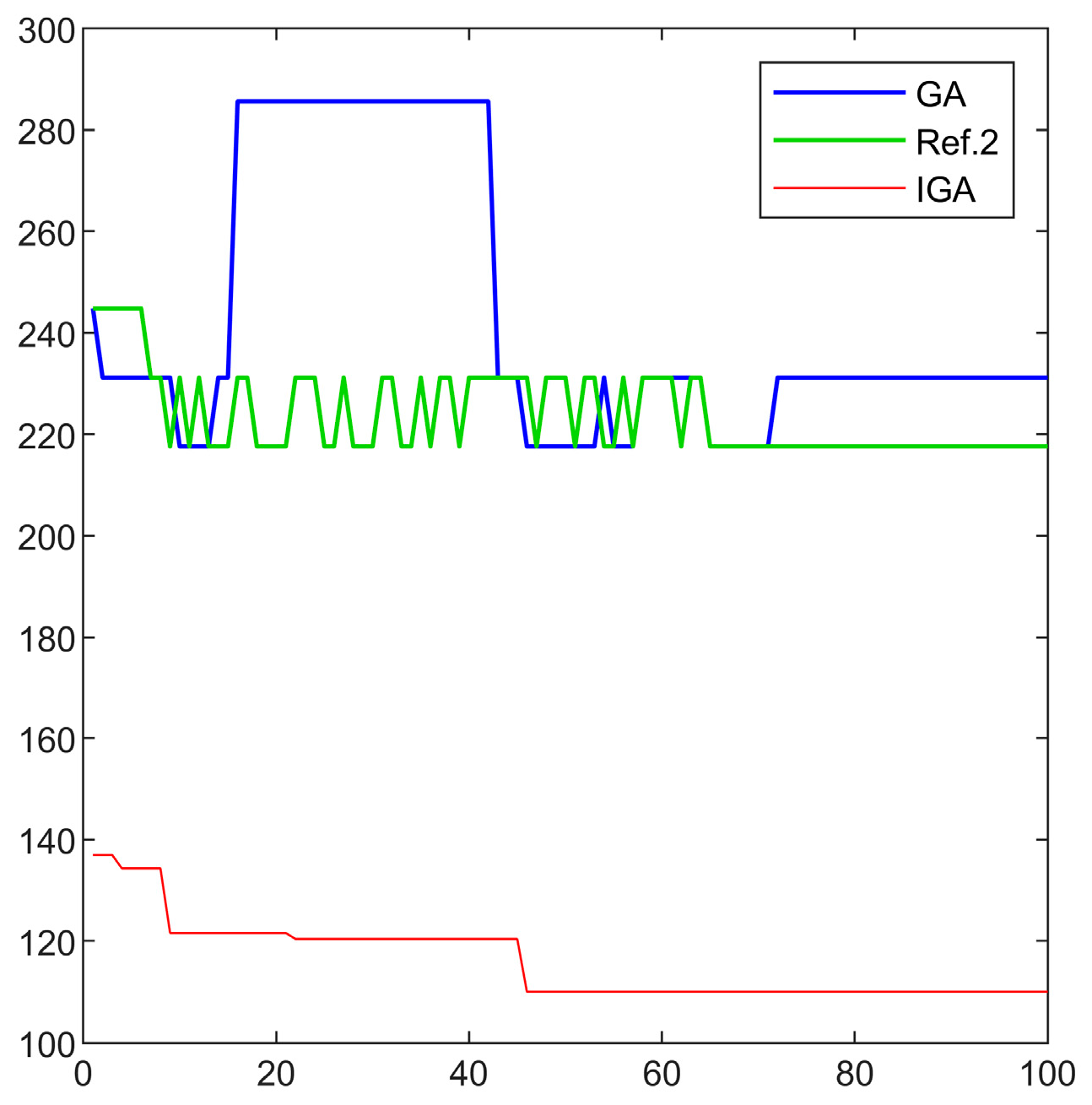
4.1. Simulation Experiment
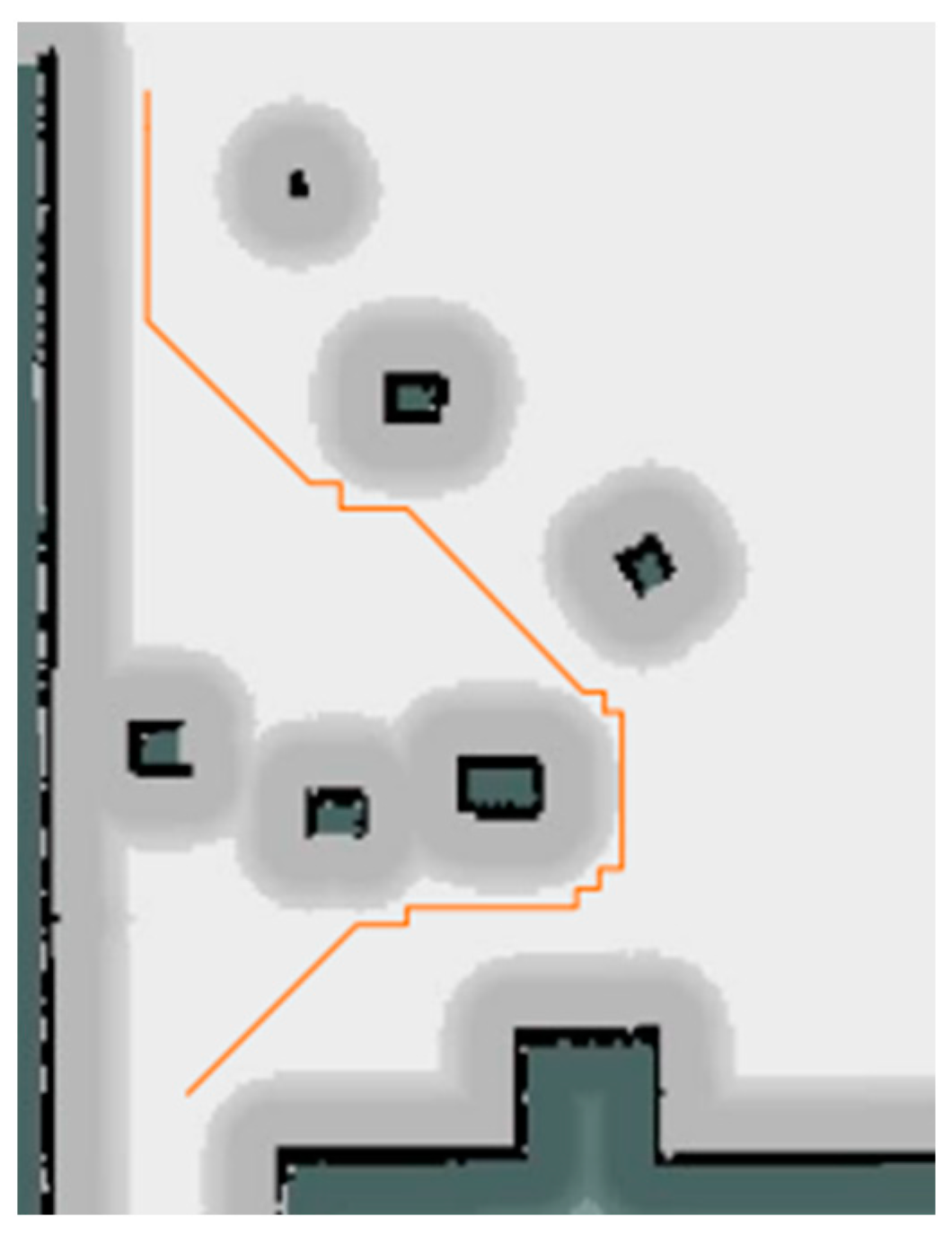
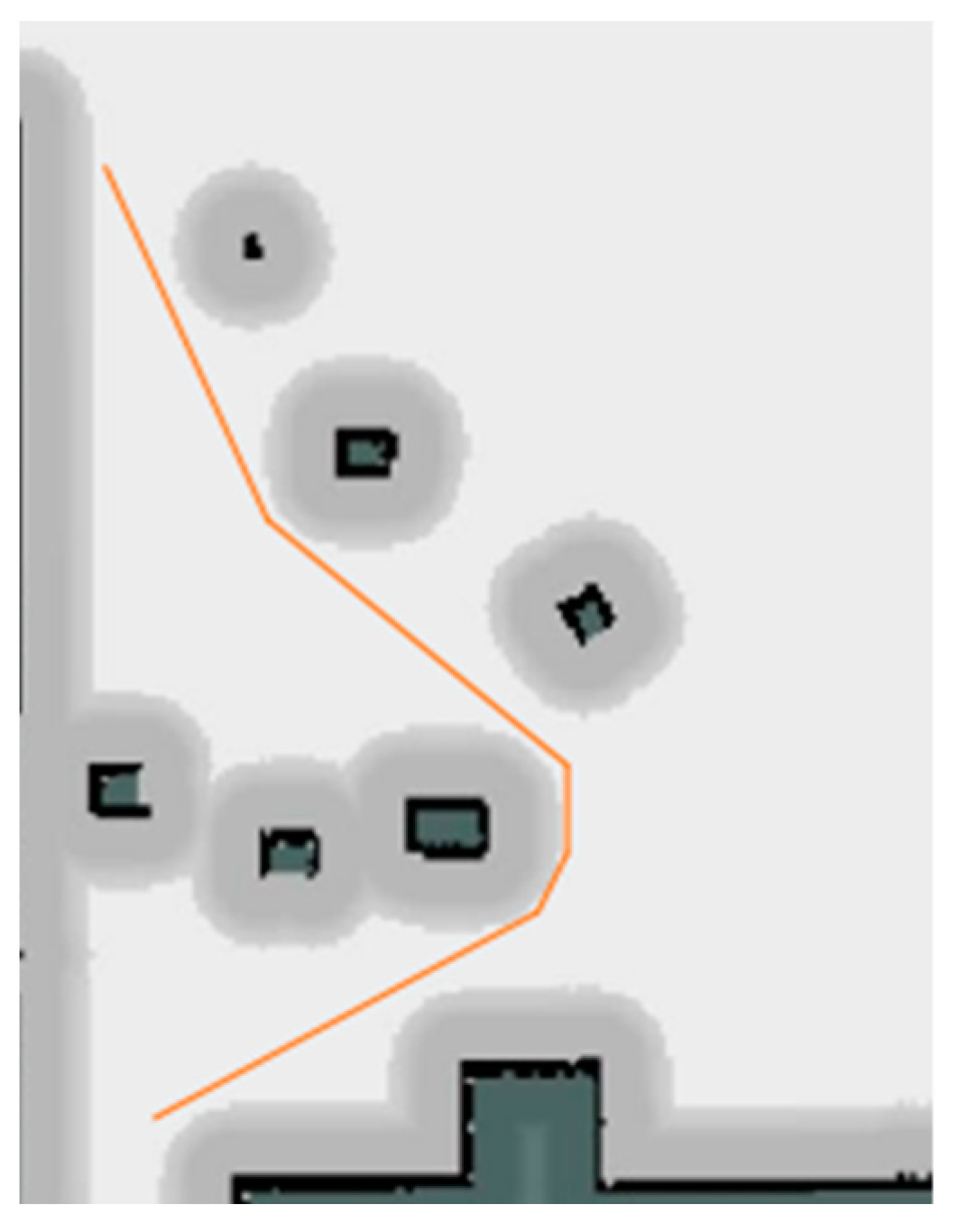
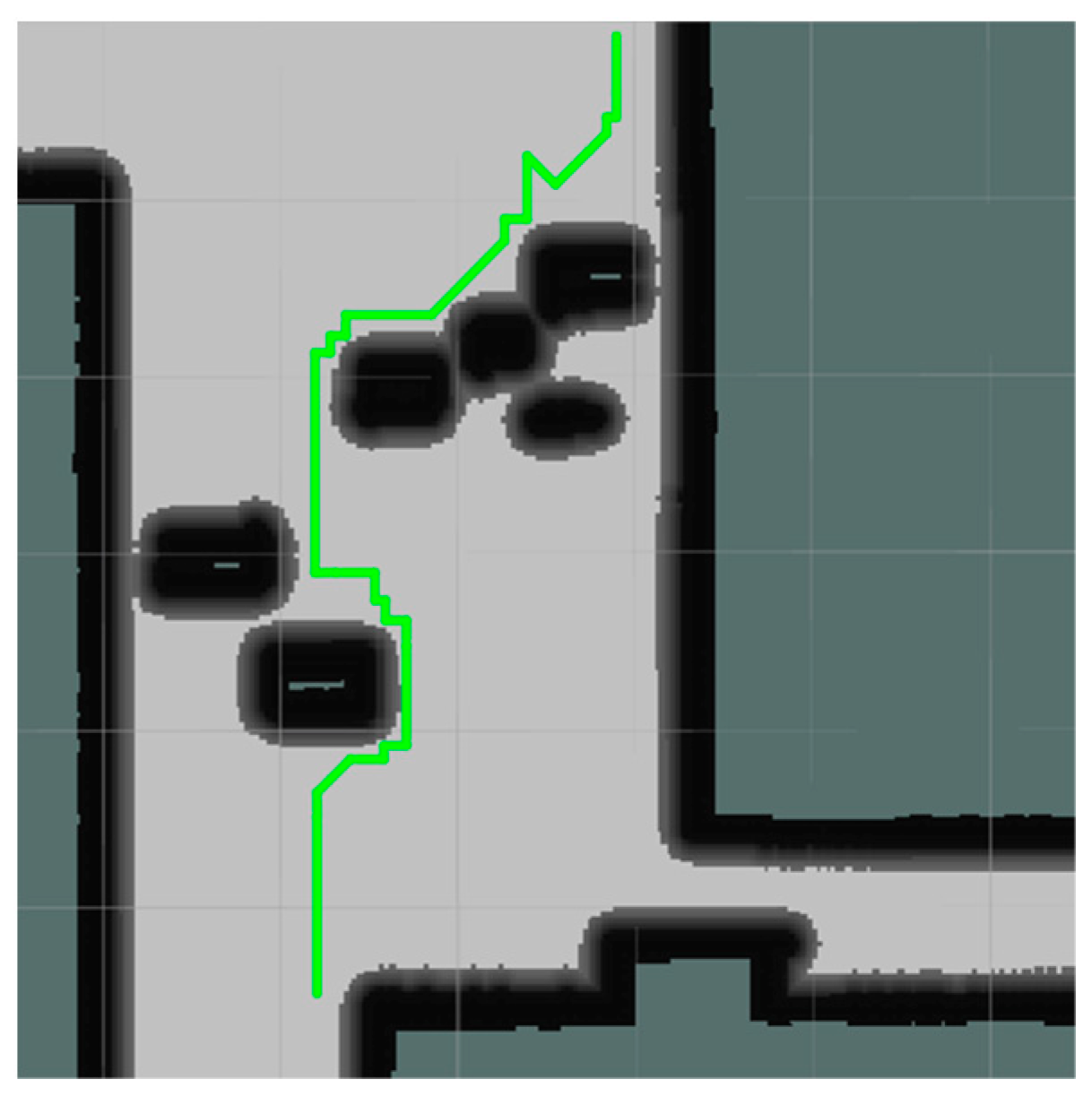
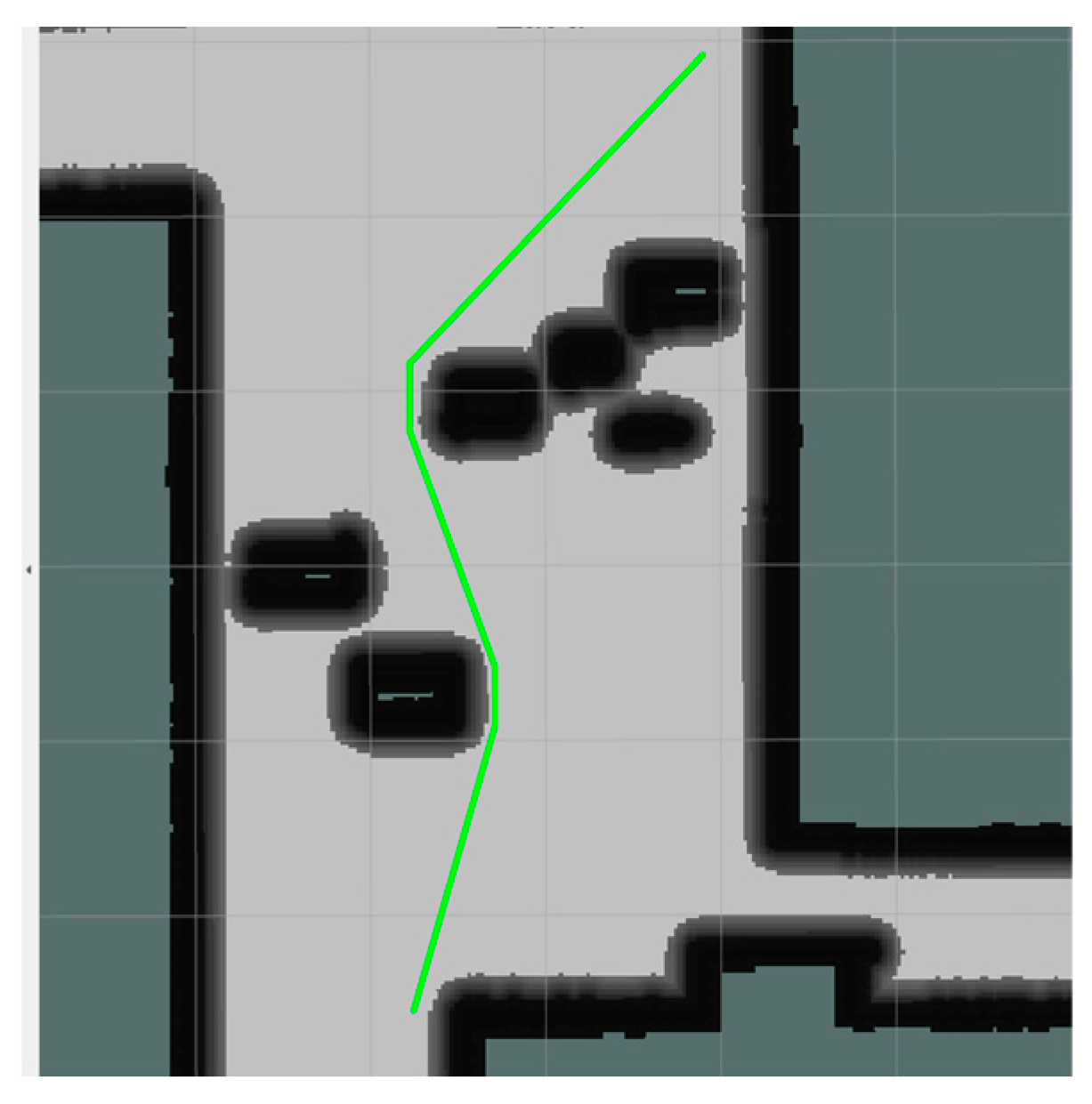
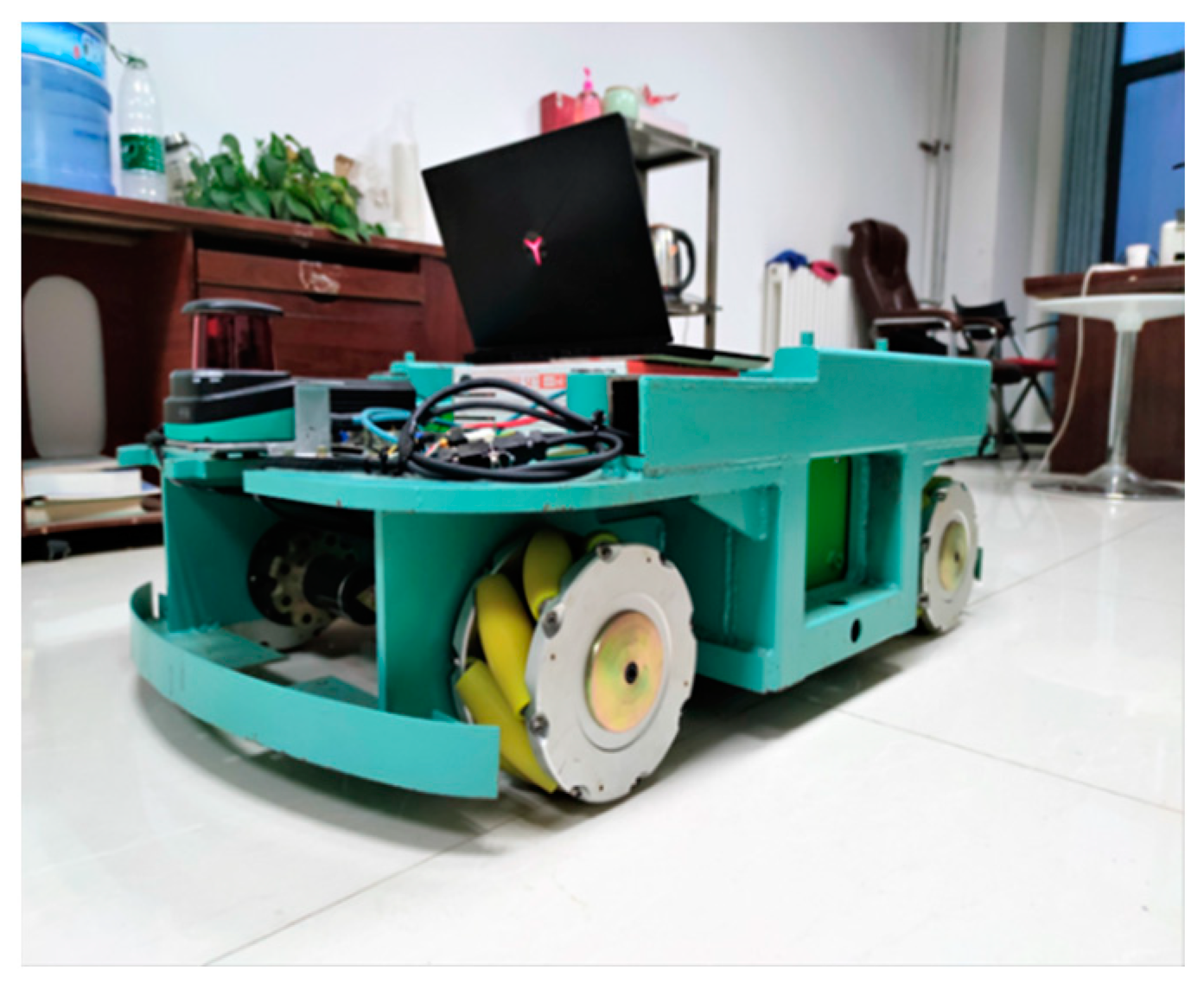
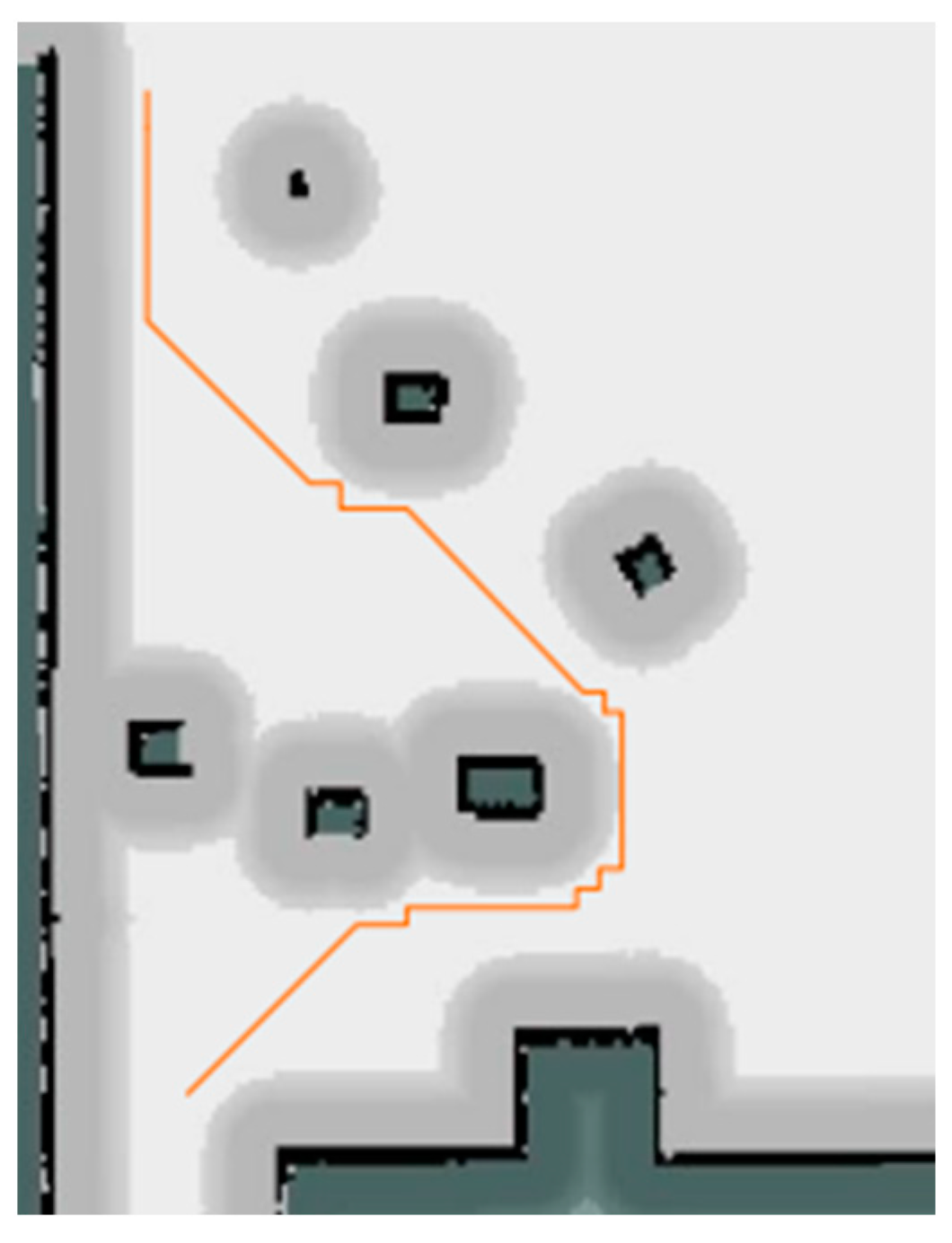
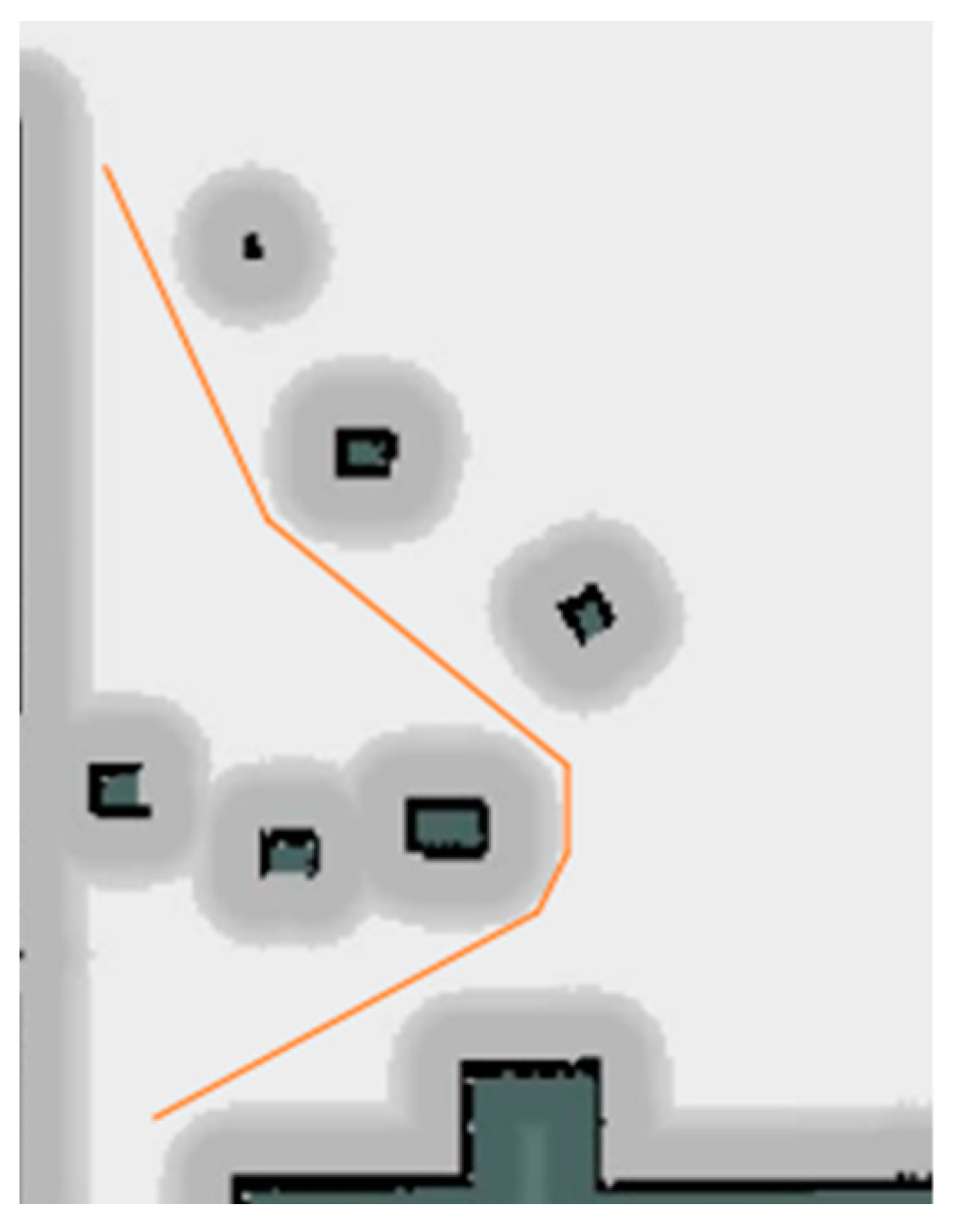
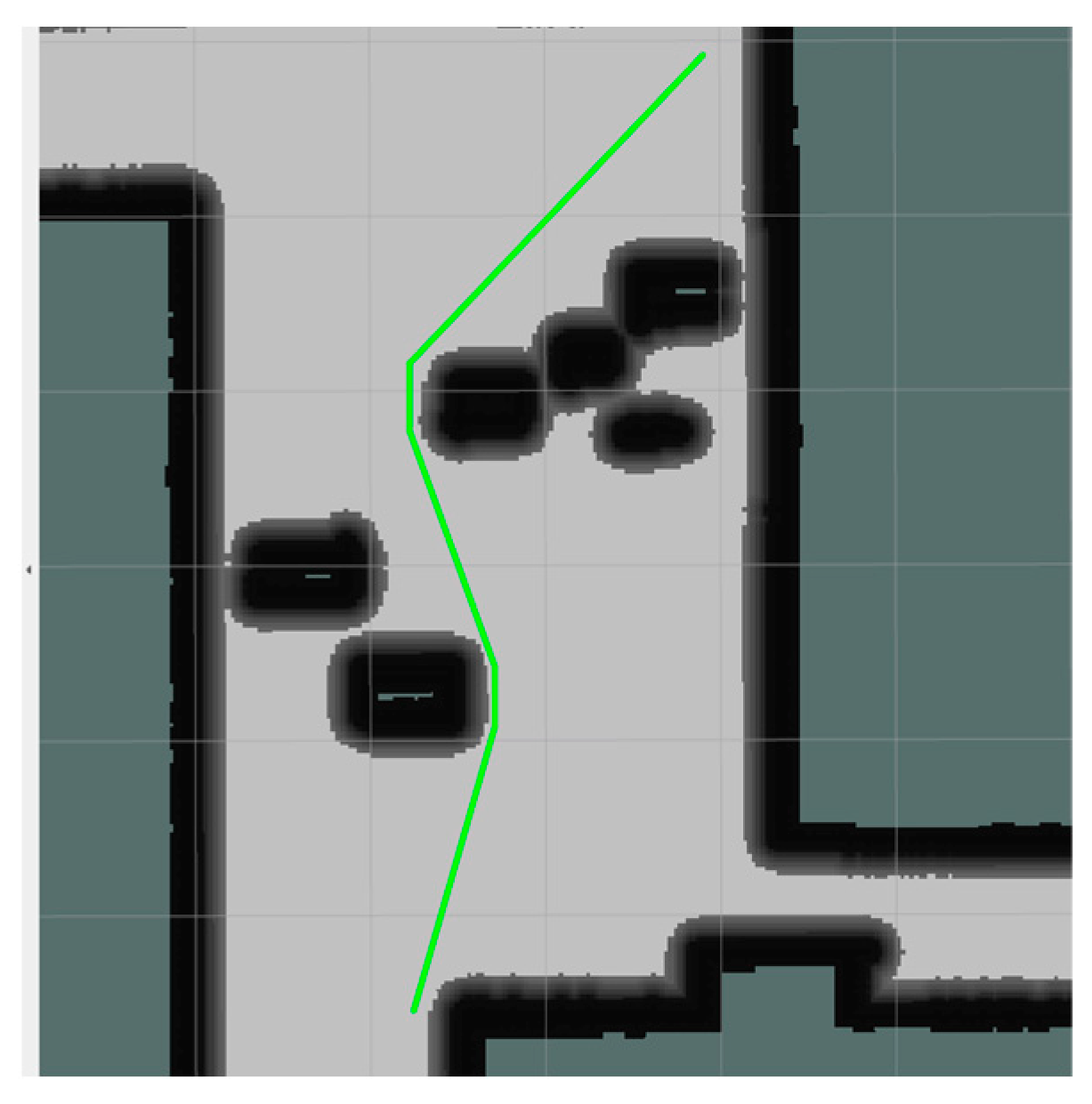
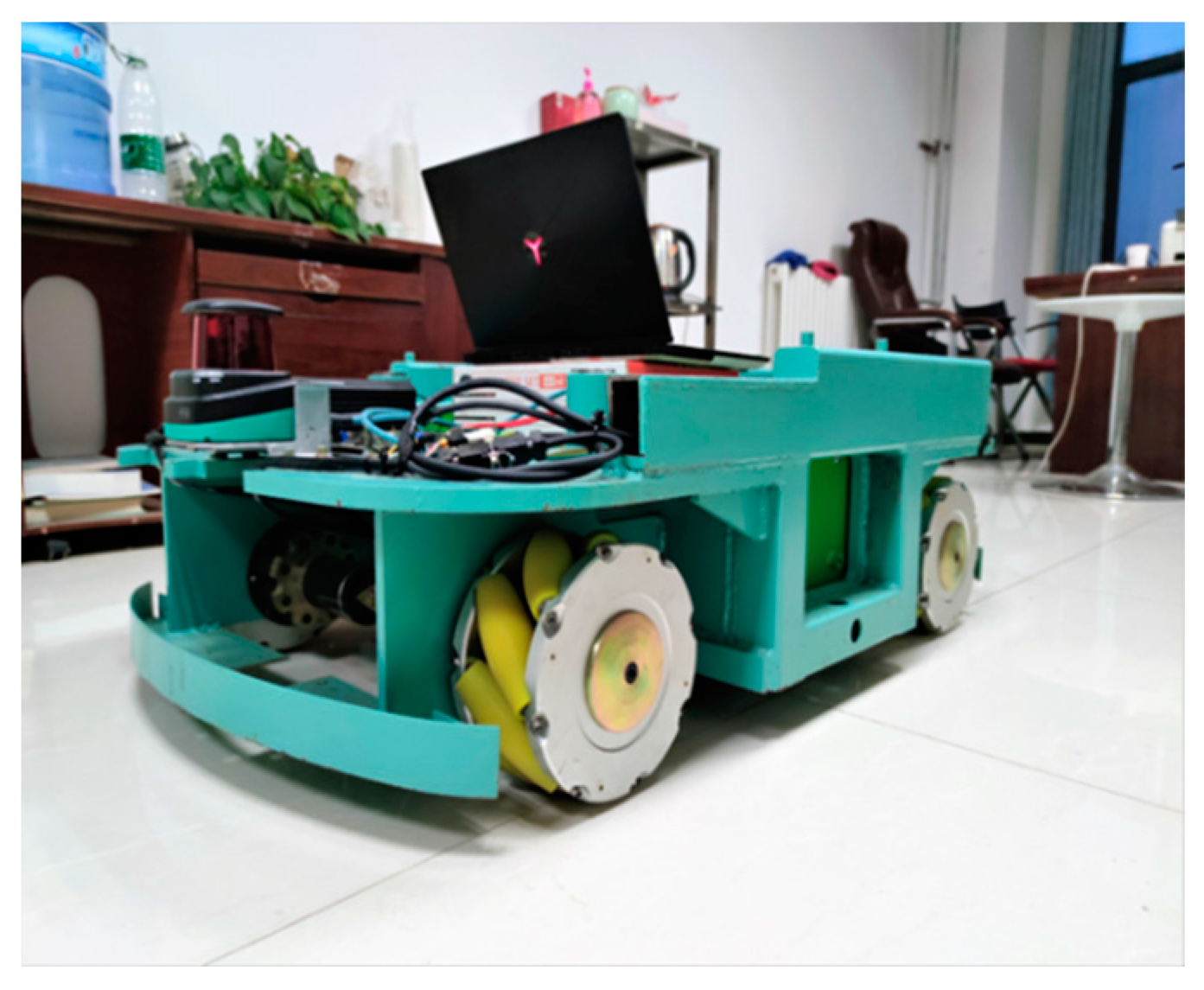
4.2. ROS Platform Experiment

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm Type | Path Length/m | Turn Count | Convergence Count |
|---|---|---|---|
| GA | 9.746254 | 17 | 41 |
| IGA | 6.985546 | 4 | 17 |
| Algorithm Type | Path Length/m | Turn Count | Convergence Count |
|---|---|---|---|
| GA | 12.44134 | 25 | 38 |
| IGA | 9.99693 | 4 | 16 |
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, Y.; Lin, Q.; Deng, Z.; Chen, G. Research Progress on AGV Path Planning Algorithms. J. Mech. Electr. Technol. 2022, 2022, 39–43. [Google Scholar] [CrossRef]
- Wang, L.; Li, M. Application of Improved Adaptive Genetic Algorithm in Mobile Robot Path Planning. J. Nanjing Univ. Sci. Technol. 2017, 41, 627–633. [Google Scholar] [CrossRef]
- Zhu, D.; Yan, M. Overview of Mobile Robot Path Planning Technology. Control Decis. 2010, 25, 961–967. [Google Scholar] [CrossRef]
- Tian, X.; Liu, G.; Zhou, W.; Guo, K. Research on Robot Path Planning Based on Improved Adaptive Genetic Algorithm. Mach. Tool Hydraul. 2016, 44, 24–28+62. [Google Scholar]
- Li, Y.; Wan, Y.; Zhang, Y.; Kuang, H. Warehouse Robot Path Planning Based on Artificial Bee Colony—Adaptive Genetic Algorithm. J. Instrum. Meas. 2022, 43, 282–290. [Google Scholar] [CrossRef]
- Qiao, S.; Wu, Y.; Zhang, J.; Shi, G. Path Planning Based on Genetic Algorithm and Artificial Potential Field. Mod. Electron. Tech. 2012, 35, 75–78. [Google Scholar] [CrossRef]
- Liu, E.; Yao, X.; Lan, H.; Jin, H. Dynamic Path Planning and Implementation of Automatic Guided Vehicle Based on Improved Genetic Algorithm. Comput. Integr. Manuf. Syst. 2018, 24, 1455–1467. [Google Scholar] [CrossRef]
- Xu, M.; Wang, J.; Liu, B.; Ma, L.; Chai, L.; Xiang, L.; Zhou, J. Robot Path Planning Based on Improved Genetic Algorithm. J. Shihezi Univ. (Nat. Sci.) 2021, 39, 391–396. [Google Scholar] [CrossRef]
- Akopov, A.S.; Beklaryan, L.A.; Beklaryan, A.L. Simulation-Based Optimisation for Autonomous Transportation Systems Using a Parallel Real-Coded Genetic Algorithm with Scalable Nonuniform Mutation. Cybern. Inf. Technol. 2021, 21, 127–144. [Google Scholar] [CrossRef]
- Zhou, R.; Liu, Y.; Zhang, K.; Yang, O. Genetic Algorithm-Based Challenging Scenarios Generation for Autonomous Vehicle Testing. IEEE J. Radio Freq. Identif. 2022, 6, 928–933. [Google Scholar] [CrossRef]
- Chaymaa, L.; Said, B.; Ali, E. Genetic Algorithm Based Approach for Autonomous Mobile Robot Path Planning. Procedia Comput. Sci. 2019, 127, 180–189. [Google Scholar]
- Chen, X.; Li, Y.; Xiao, S. Optimization of Fresh Agricultural Products Logistics Distribution Path Based on Improved Genetic Algorithm. J. Dalian Jiaotong Univ. 2022, 43, 97–102+111. [Google Scholar] [CrossRef]
- Li, Y.; Dong, D.; Guo, X. Mobile robot path planning based on improved genetic algorithm with A-star heuristic method. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020; Volume 9. [Google Scholar]
- Zhao, J. Research on Ant Colony Optimization Algorithm for Mobile Robot Path Planning. Doctoral Dissertation, Northeastern University, Boston, MA, USA, 2012. [Google Scholar]
- Wang, J.; Wang, X.; Tian, Q.; Sun, A.; Zhang, X.; Yuan, L. Robot Path Planning Based on Improved Fuzzy Adaptive Genetic Algorithm. Mach. Tool Hydraul. 2021, 49, 18–23. [Google Scholar]
- Niu, Q.; Li, B. Path Planning of Omnidirectional AGV Based on Simulated Annealing Genetic Algorithm. Comput. Integr. Manuf. Syst. 2023, 1–21. Available online: http://kns.cnki.net/kcms/detail/11.5946.TP.20220517.1105.014.html (accessed on 25 May 2023).
- Niu, Q.; Dong, X.; Fu, Y. Improved AGV Path Planning Based on Ant Colony Algorithm Heuristic Strategy. J. Comput. Integr. Manuf. Syst. 2024, 1–19. [Google Scholar] [CrossRef]
- Levenshtein, V. Binary codes capable of correcting deletions, insertions, and reversals. Sov. Phys. Dokl. 1966, 10, 707–710. [Google Scholar]
- Cao, J.; Zhu, R. A Genetic Algorithm Based on Adaptive Operators and Migration Strategy. Mech. Sci. Technol. 2003, 2003, 64–66. [Google Scholar]
- Xu, X.; Yu, X.; Zhao, Y.; Liu, C.; Wu, X. Global Path Planning of Mobile Robot Based on Improved Genetic Algorithm. Comput. Integr. Manuf. Syst. 2022, 28, 1659–1672. [Google Scholar] [CrossRef]
- Chang, J.; Ren, Y. Robot Path Planning Based on Improved Genetic Algorithm. Mod. Mach. Autom. Technol. 2023, 2023, 23–27. [Google Scholar] [CrossRef]
- Zhang, Z.; Ke, Z.; Zhou, J.; Qian, Q.; Hu, X. Robot Path Planning Based on Improved Multi-objective Adaptive Genetic Algorithm. J. Xi’an Univ. Technol. 2023, 69–78. Available online: http://kns.cnki.net/kcms/detail/61.1294.N.20221012.1019.002.html (accessed on 18 August 2023).
- Xu, L.; Liu, Y.; Wang, Q. Application of Adaptive Genetic Algorithm in Robot Path Planning. Comput. Eng. Appl. 2020, 56, 36–41. [Google Scholar]
- Hu, C.; Feng, W. Optimization of Mobile Robot Path Based on Improved Adaptive Genetic Algorithm. J. Lanzhou Univ. Technol. 2011, 37, 41–45. [Google Scholar]
- Zhang, X. Mobile Robot Path Planning Based on Genetic Algorithm. Master’s Thesis, Xi’an University of Architecture and Technology, Xi’an, China, 2014. [Google Scholar]






| Parameter Name | Parameter Value | Parameter Name | Parameter Value |
|---|---|---|---|
| Number of populations | 200 | Grid size | 1 m × 1 m |
| Maximum crossover probability | 0.9 | Minimum crossover probability | 0.6 |
| Maximum probability of variation | 0.2 | Minimum probability of variation | 0.005 |
| Maximum number of iterations | 100 | Cooling rate | 0.9 |
| Starting temperature | 300 | Termination temperature | 0 |
| Map Size | The Type of Algorithm | Path Length/m | Path Angle/ | Number of Turns | |||
|---|---|---|---|---|---|---|---|
| Average Value | Optimum | Average Value | Optimum | Average Value | Optimum | ||
| 10 × 10 | GA | 15.2853 | 14.4852 | 392 | 360 | 8.2 | 8 |
| [2] | 14.9237 | 14.4852 | 381 | 360 | 8.2 | 8 | |
| IGA | 14.6345 | 14.2624 | 213 | 127 | 4.2 | 3 | |
| 20 × 20 | GA | 30.1064 | 29.7990 | 629 | 585 | 13.4 | 13 |
| [2] | 29.4463 | 28.8995 | 594 | 495 | 12.8 | 11 | |
| IGA | 28.0954 | 27.8147 | 316 | 207 | 10 | 8 | |
| 30 × 30 | GA | 46.1955 | 45.1127 | 1047 | 945 | 22.4 | 21 |
| [2] | 44.5269 | 44.5269 | 802 | 765 | 17 | 17 | |
| IGA | 44.6581 | 44.4910 | 289 | 84 | 7.2 | 3 | |
| 40 × 40 | GA | 68.1886 | 66.9117 | 783 | 720 | 16.9 | 16 |
| [2] | 65.9460 | 65.9411 | 728 | 720 | 16.19 | 16 | |
| IGA | 65.8953 | 65.8278 | 469 | 349 | 9.7 | 8 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niu, Q.; Fu, Y.; Dong, X. Omnidirectional AGV Path Planning Based on Improved Genetic Algorithm. World Electr. Veh. J. 2024, 15, 166. https://doi.org/10.3390/wevj15040166
Niu Q, Fu Y, Dong X. Omnidirectional AGV Path Planning Based on Improved Genetic Algorithm. World Electric Vehicle Journal. 2024; 15(4):166. https://doi.org/10.3390/wevj15040166
Chicago/Turabian StyleNiu, Qinyu, Yao Fu, and Xinwei Dong. 2024. "Omnidirectional AGV Path Planning Based on Improved Genetic Algorithm" World Electric Vehicle Journal 15, no. 4: 166. https://doi.org/10.3390/wevj15040166
APA StyleNiu, Q., Fu, Y., & Dong, X. (2024). Omnidirectional AGV Path Planning Based on Improved Genetic Algorithm. World Electric Vehicle Journal, 15(4), 166. https://doi.org/10.3390/wevj15040166