
Monitoring CH4 Fluxes in Sewage Sludge Treatment Centres: Challenging Emission Underreporting

 ,
,
Abstract
1. Introduction
2. Materials and Methods
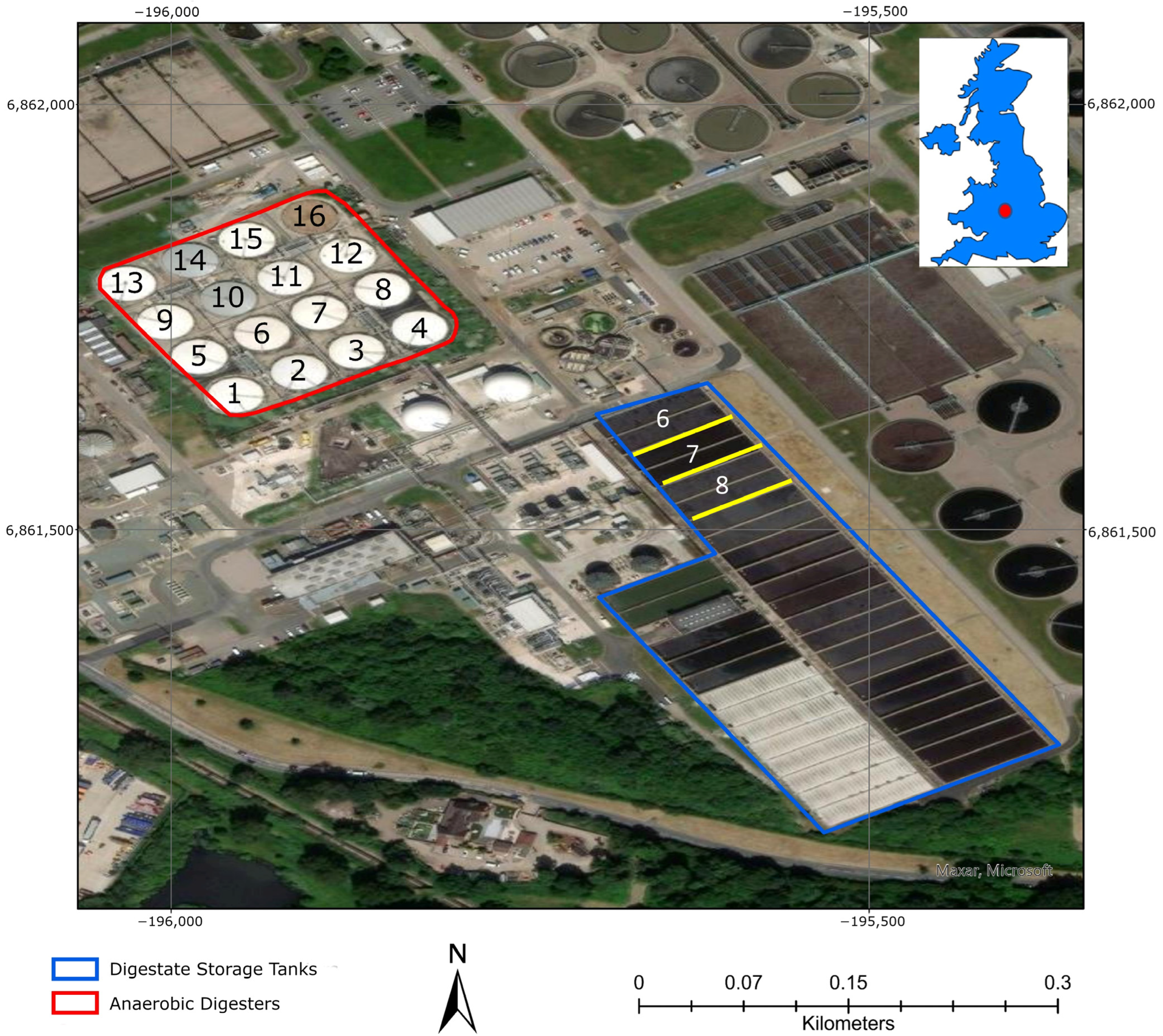
2.1. Case Study Area
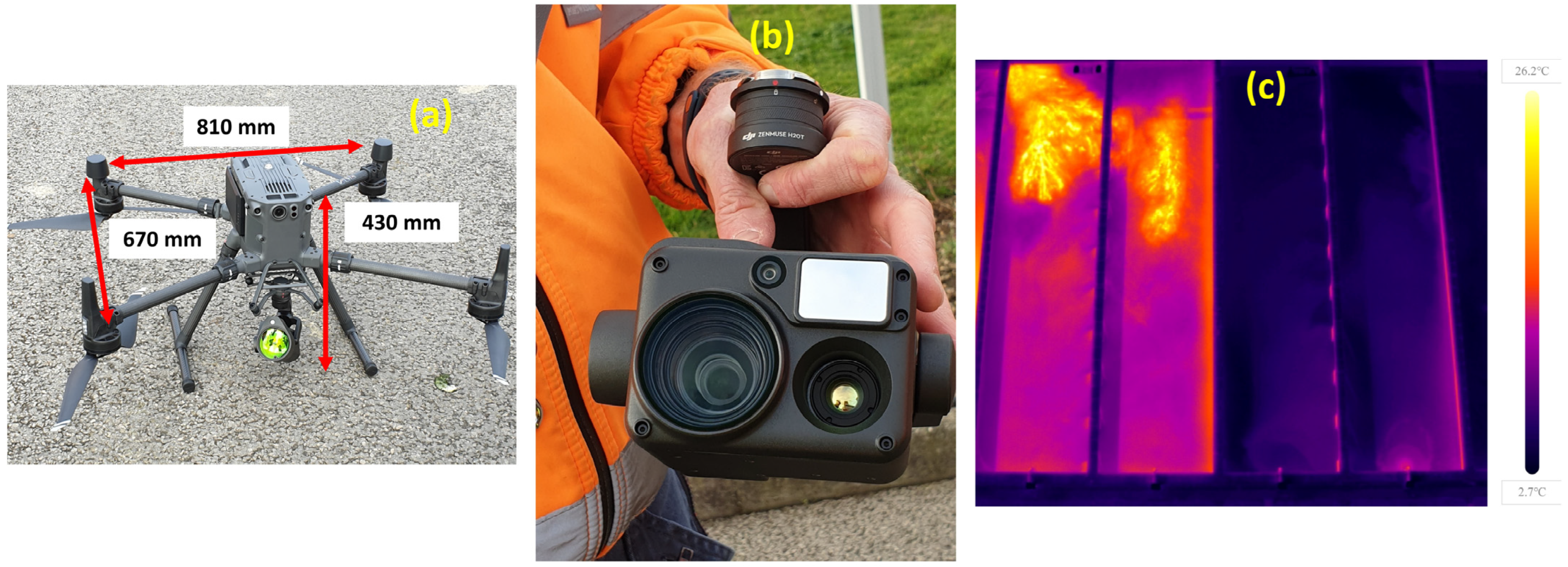
2.2. UAV Data Collection
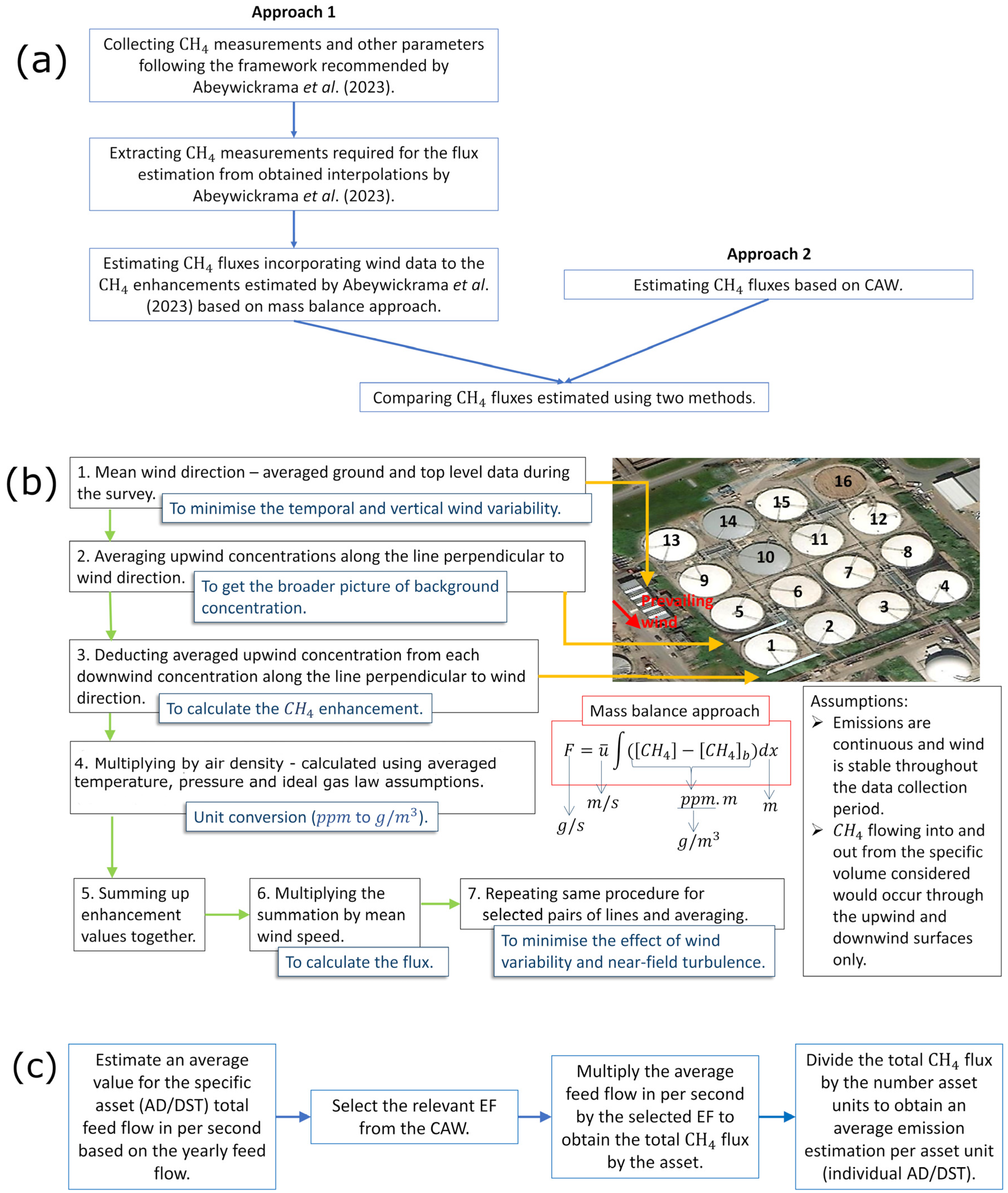
2.3. Data Analysis
2.3.1. Mass Balance Approach
2.3.2. Carbon Accounting Workbook (CAW)
3. Results
3.1. UAV Data Collection
3.2. CH4 Flux Estimation by Mass Balance Approach
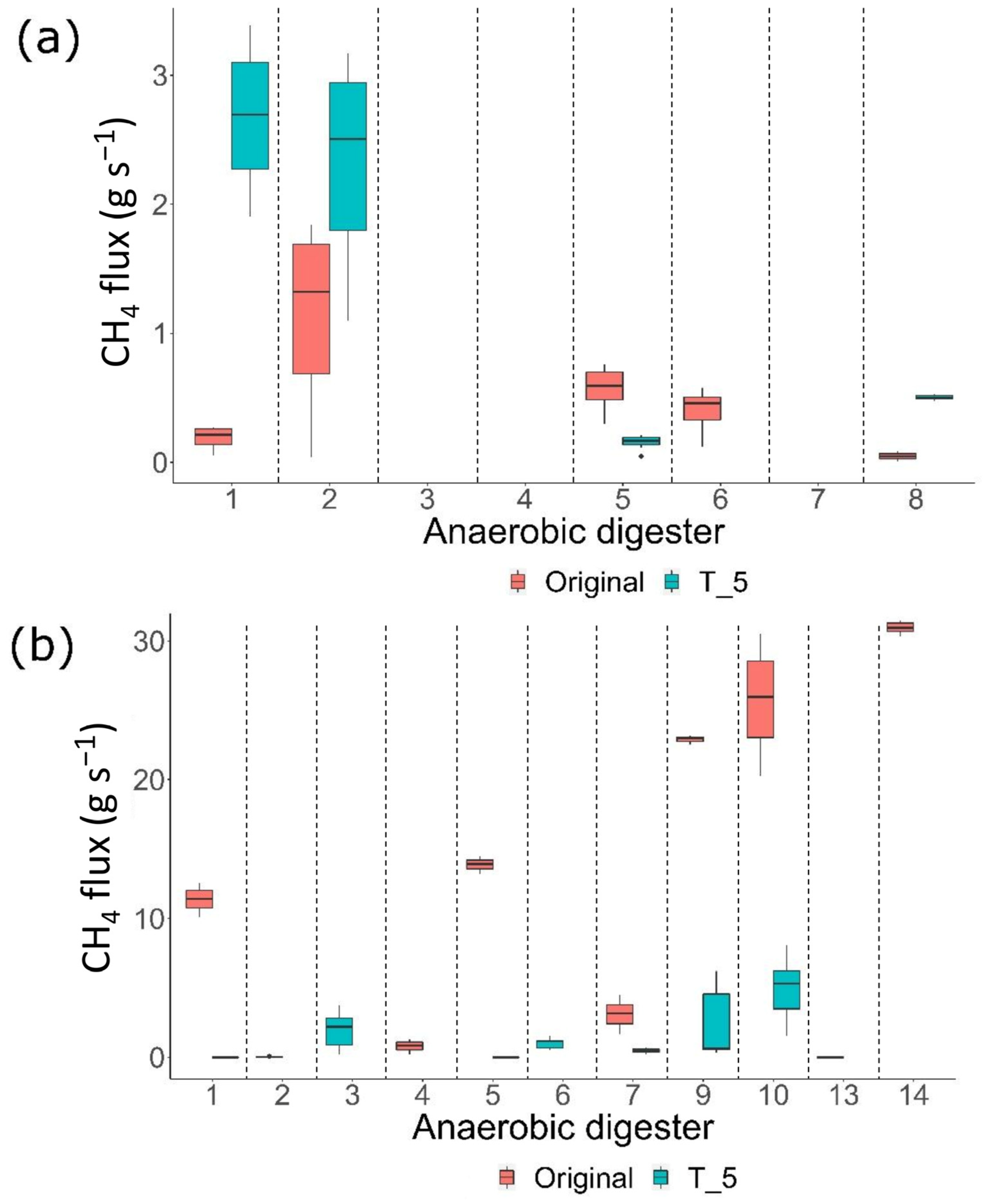
3.2.1. Anaerobic Digesters
3.2.2. Digestate Storage Tanks
3.3. CH4 Fluxes Estimated by the Carbon Accounting Workbook (CAW)
3.3.1. Anaerobic Digesters
3.3.2. Digestate Storage Tanks
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rogelj, J.; den Elzen, M.; Höhne, N.; Fransen, T.; Fekete, H.; Winkler, H.; Schaeffer, R.; Sha, F.; Riahi, K.; Meinshausen, M. Paris Agreement climate proposals need a boost to keep warming well below 2 °C. Nature 2016, 534, 631–639. [Google Scholar] [CrossRef] [PubMed]
- Water UK; Ricardo; MacDonald, M. Net Zero 2030 Routemap. 2020. Available online: https://www.water.org.uk/sites/default/files/2023-08/Water-UK-Net-Zero-2030-Routemap.pdf (accessed on 19 May 2024).
- Forster, P.; Storelvmo, T.; Armour, K.; Collins, W.; Dufresne, J.L.; Frame, D.; Lunt, D.J.; Mauritsen, T.; Palmer, M.D.; Watanabe, M.; et al. Chapter 7: The Earth’s Energy Budget, Climate Feedbacks, and Climate Sensitivity. In IPCC Sixth Assessment Report; Cambridge University Press: Cambridge, UK; Cambridge University Press: New York, NY, USA, 2021; pp. 923–1054. [Google Scholar] [CrossRef]
- Skea, J.; Shukla, P.; Reisinger, A.; Slade, R.; Pathak, M.; Khourdajie, A.; Diemen, R.; Abdulla, A.; Akimoto, K.; Babiker, M.; et al. Climate Change 2022, Mitigation of Climate Change Summary for Policymakers (SPM). 2022. Available online: https://www.ipcc.ch/report/ar6/wg2/ (accessed on 19 May 2024).
- Doorn, M.R.J.; Towprayoon, S.; Vieira, S.; Irving, W.; Palmer, C.; Pipatti, R.; Wang, C. Chapter 6 Wastewater Treatment and Discharge. In 2006 IPCC Guidelines for National Greenhouse Gas Inventories Volume 5 Waste; Intergovernmental Panel On Climate Change: Geneva, Switzerland, 2006; Volume 5, pp. 1–56. [Google Scholar]
- Hill, N.; Karagiani, E.; Jones, L.; MacCarthy, J.; Bonifazi, E.; Hinton, S.; Walkr, C.; Harris, B. 2021 Government Greenhouse Gas Conversion Factors for Company Reporting: Methodology Paper; Department for Business Energy & Industrial Strategy (BEIS): London, UK, 2021. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/904215/2019-ghg-conversion-factors-methodology-v01-02.pdf (accessed on 19 May 2024).
- Kuylenstierna, J.C.; Michalopoulou, E.; Malley, C. Global Methane Assessment Benefits and Costs of Mitigating Methane Emissions; Climate & Clean Air Coalition & UN Environment Programme: Paris, France, 2021. [Google Scholar]
- Brotto, A.; Kraakman, B.; Kyne, C.; Lake, A.; Perez, E.R.; Scott, S. Quantifying and Reducing Direct Greenhouse Gas Emissions from Waste and Water Treatment Process—Phase 1; UK Water Industry Research: London, UK, 2020. [Google Scholar]
- European Industrial Emissions Portal. Pollutant Index. Available online: https://industry.eea.europa.eu/pollutants/pollutant-index (accessed on 18 May 2024).
- Delre, A.; Mønster, J.; Scheutz, C. Greenhouse gas emission quantification from wastewater treatment plants, using a tracer gas dispersion method. Sci. Total Environ. 2017, 605–606, 258–268. [Google Scholar] [CrossRef] [PubMed]
- Aboobakar, A. Quantification of Greenhouse Gas Emissions in Biological Wastewater Treatment. Ph.D. Thesis, Cranfield University, Cranfield, UK, 2014. [Google Scholar]
- Daelman, M.R.J.; van Voorthuizen, E.M.; van Dongen, U.G.J.M.; Volcke, E.I.P.; van Loosdrecht, M.C.M. Methane emission during municipal wastewater treatment. Water Res. 2012, 46, 3657–3670. [Google Scholar] [CrossRef] [PubMed]
- Doorn, M.R.J.; Strait, R.P.; Barnard, W.R.; Pechan, E.H.; Eklund, B.; Thorneloe, S.A. Estimates of Global Greenhouse Gas Emissions from Industrial and Domestic Wastewater Treatment; US EPA Office of Research and Development, Air Pollution Prevention and Control Division: Research Triangle Park, NC, USA, 1997. [Google Scholar]
- Kosse, P.; Knoop, O.; Lübken, M.; Schmidt, T.C.; Wichern, M.; Methane Emissions from Wastewater Treatment Plants-Assessment and Review of Quantification Methods. WaterSolutions, International Energy Agency Bioenergy 2018. Available online: https://www.researchgate.net/publication/323308510 (accessed on 19 May 2024).
- Parravicini, V.; Svardal, K.; Krampe, J. Greenhouse Gas Emissions from Wastewater Treatment Plants. In Energy Procedia; Elsevier Ltd.: Amsterdam, The Netherlands, 2016; pp. 246–253. [Google Scholar] [CrossRef]
- Liebetrau, J.; Reinelt, T.; Agostini, A.; Linke, B. Methane Emissions from Biogas Plants; International Energy Agency Bioenergy: Paris, France, 2017; Available online: https://www.ieabioenergy.com/wp-content/uploads/2018/01/Methane-Emission_web_end_small.pdf (accessed on 19 May 2024).
- Allen, G.; Pitt, J.; Hollingsworth, P.; Mead, I.; Kabbabe, K.; Roberts, G.; Percival, C. Measuring Landfill Methane Emissions Using Unmanned Aerial Systems: Field Trial and Operational Guidance. 2015. Available online: https://www.gov.uk/government/publications/measuring-landfill-methane-emissions-using-unmanned-aerial-systems (accessed on 19 May 2024).
- Nathan, B.J.; Golston, L.M.; O’brien, A.S.; Ross, K.; Harrison, W.A.; Tao, L.; Lary, D.J.; Johnson, D.R.; Covington, A.N.; Clark, N.N.; et al. Near-Field Characterization of Methane Emission Variability from a Compressor Station Using a Model Aircraft. Environ. Sci. Technol. 2015, 49, 7896–7903. [Google Scholar] [CrossRef] [PubMed]
- Abeywickrama, H.G.K.; Bajón-Fernández, Y.; Srinamasivayam, B.; Turner, D.; Casado, M.R. Development of a UAV Based Framework for CH4 Monitoring in Sludge Treatment Centres. Remote Sens. 2023, 15, 3704. [Google Scholar] [CrossRef]
- Shorrock, C.; Driessen, W.; Snelson, P.; Chadha, M. Advanced Reject Water Treatment. 2014. Available online: https://waterprojectsonline.com/wp-content/uploads/case_studies/2012/Minworth-STW-Anammox-Plant-2012.pdf (accessed on 19 May 2024).
- Esri. ‘Imagery’ [basemap]. Scale Not Given. ‘World Imagery’. 12 December 2009. Available online: https://www.arcgis.com/home/item.html?id=10df2279f9684e4a9f6a7f08febac2a9 (accessed on 19 May 2024).
- AiLF. User Manual UAV Based Laser Methane Leakage Detector; AiLF (Shandong) Instruments Inc.: Jinan, China, 2019; Available online: https://www.manualslib.com/manual/1860232/Ailf-U10.html (accessed on 19 May 2024).
- Maldaner, L.; Wagner-Riddle, C.; VanderZaag, A.C.; Gordon, R.; Duke, C. Methane emissions from storage of digestate at a dairy manure biogas facility. Agric. For. Meteorol. 2018, 258, 96–107. [Google Scholar] [CrossRef]
- Yang, S.; Talbot, R.W.; Frish, M.B.; Golston, L.M.; Aubut, N.F.; Zondlo, M.A.; Gretencord, C.; McSpiritt, J. Natural gas fugitive leak detection using an unmanned aerial vehicle: Measurement system description and mass balance approach. Atmosphere 2018, 9, 383. [Google Scholar] [CrossRef]
- Shaw, J.T.; Shah, A.; Yong, H.; Allen, G. Methods for quantifying methane emissions using unmanned aerial vehicles: A review. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2021, 379, 20200450. [Google Scholar] [CrossRef] [PubMed]
- Shah, A.; Allen, G.; Pitt, J.R.; Ricketts, H.; Williams, P.I.; Helmore, J.; Finlayson, A.; Robinson, R.; Kabbabe, K.; Hollingsworth, P.; et al. A near-field Gaussian plume inversion flux quantification method, applied to unmanned aerial vehicle sampling. Atmosphere 2019, 10, 396. [Google Scholar] [CrossRef]
- Yamartino, R.J. A Comparison of Several ‘Single-Pass’ Estimators of the Standard Deviation of Wind Direction. Clim. Appl. Meteorol. 1984, 23, 1362–1366. [Google Scholar]
- Allen, G.; Hollingsworth, P.; Kabbabe, K.; Pitt, J.R.; Mead, M.I.; Illingworth, S.; Roberts, G.; Bourn, M.; Shallcross, D.E.; Percival, C.J. The development and trial of an unmanned aerial system for the measurement of methane flux from landfill and greenhouse gas emission hotspots. Waste Manag. 2019, 87, 883–892. [Google Scholar] [CrossRef] [PubMed]
- Moore, D.P.; Li, N.P.; Wendt, L.P.; Castañeda, S.R.; Falinski, M.M.; Zhu, J.-J.; Song, C.; Ren, Z.J.; Zondlo, M.A. Underestimation of Sector-Wide Methane Emissions from United States Wastewater Treatment. Environ. Sci. Technol. 2023, 57, 4082–4090. [Google Scholar] [CrossRef] [PubMed]
- Fredenslund, A.M.; Hinge, J.; Holmgren, M.A.; Rasmussen, S.G.; Scheutz, C. On-site and ground-based remote sensing measurements of methane emissions from four biogas plants: A comparison study. Bioresour. Technol. 2018, 270, 88–95. [Google Scholar] [CrossRef] [PubMed]
- Yong, H.; Allen, G.; Mcquilkin, J.; Ricketts, H.; Shaw, J.T. Lessons learned from a UAV survey and methane emissions calculation at a UK landfill. Waste Manag. 2024, 180, 47–54. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Asset | Survey Code | Date | N | Flights | (m s−1) | (°) | (°C) | (%) | (hPa) |
|---|---|---|---|---|---|---|---|---|---|
| AD | 1 | 21 March 2021 | 3771 | 6 | 2.8 ± 0.4 | 150 ± 10 | 12.7 ± 0.7 | 59 ± 4 | 1025.8 ± 0.4 |
| 2 | 18 May 2021 | 284 | 8 | 5.8 ± 0.9 | 194 ± 5 | 18.0 ± 1.4 | 58 ± 3 | 1018.3 ± 1.2 | |
| DST | 3 | 4 November 2021 | 532 | 1 | 4.9 | 302 | 12.3 | 72 | 1013.8 |
| Asset | Loss as Percentage of Total Gas Produced (%) | Loss (kg CH4 tDS−1) |
|---|---|---|
| Losses via the annular space of the floating roof digesters 1 | 2.5 | 3.3 |
| Venting due to ignition failure and downtime at flare stacks 1 | 0.21 | 0.29 |
| Incomplete combustion 1 | 1 | 1.45 |
| Fugitive emissions 1 | 3.8 | 5.1 |
| Secondary open digestion 2 | 5.9 | 8 |
| Total | 13.4 | 18.1 |
| CH4 Flux (g s−1) | ||||||||
|---|---|---|---|---|---|---|---|---|
| Survey 1 | ||||||||
| Original Data Set | m | m | m | |||||
| Original | Std. Deviation | T_5 | Std. Deviation | T_2.5 | Std. Deviation | T_0 | Std. Deviation | |
| d1 | 0.19 | 0.09 | 2.68 | 0.56 | 2.79 | 0.56 | 2.90 | 0.56 |
| d2 | 1.14 | 0.67 | 2.32 | 0.79 | 2.35 | 0.77 | 2.43 | 0.78 |
| d3 | - | - | - | - | - | - | - | - |
| d4 | - | - | - | - | - | - | - | - |
| d5 | 0.57 | 0.17 | 0.15 | 0.06 | 0.14 | 0.06 | 0.13 | 0.05 |
| d6 | 0.40 | 0.16 | - | - | - | - | - | - |
| d7 | - | - | - | - | - | - | - | - |
| d8 | 0.05 | 0.06 | 0.50 | 0.02 | 0.54 | 0.02 | 0.57 | 0.02 |
| Total flux | 2.3 ± 0.7 | 5.7 ± 1.0 | 5.8 ± 1.0 | 6.0 ± 1.0 | ||||
| Survey 2 | ||||||||
| Original Data Set | m | m | m | |||||
| Original | Std. Deviation | T_5 | Std. Deviation | T_2.5 | Std. Deviation | T_0 | Std. Deviation | |
| d1 | 11.4 | 0.9 | 0.00002 | 0.00002 | 0.00002 | 0.00002 | 0.00002 | 0.00002 |
| d2 | - | - | 0.02 | 0.03 | 0.03 | 0.03 | 0.03 | 0.04 |
| d3 | - | - | 1.93 | 1.30 | 2.04 | 1.36 | 2.13 | 1.40 |
| d4 | 0.8 | 0.4 | - | - | - | - | - | - |
| d5 | 13.9 | 0.5 | 0.0009 | 0.0008 | 0.0009 | 0.0008 | 0.0009 | 0.0008 |
| d6 | - | - | 0.99 | 0.38 | 1.07 | 0.39 | 1.14 | 0.40 |
| d7 | 3.1 | 1.0 | 0.47 | 0.19 | 0.48 | 0.20 | 0.51 | 0.21 |
| d9 | 22.9 | 0.2 | 2.49 | 2.69 | 2.52 | 2.69 | 2.57 | 2.70 |
| d10 | 25.7 | 3.8 | 4.91 | 2.48 | 4.91 | 2.48 | 4.97 | 2.51 |
| d13 | - | - | 0.0008 | 0.0005 | 0.0008 | 0.0005 | 0.0008 | 0.0006 |
| d14 | 31.0 | 0.4 | - | - | - | - | - | - |
| Total flux | 109 ± 4 | 11 ± 4 | 11 ± 4 | 11 ± 4 | ||||
| (g s−1) | ||
|---|---|---|
| CH4 Flux | Std. Deviation | |
| Original | 2.0 | 1.5 |
| T_5 | 1.8 | - |
| T_2.5 | 0.9 | - |
| T_0 | 1.1 | - |
| Asset | Date of Survey | CH4 Flux (g s−1) | CH4 Emission Factor (kg CH4 tDS−1) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| N | Original | T_5 | T_2.5 | T_0 | CAW | Original | T_5 | T_2.5 | T_0 | CAW | ||
| AD | 21 March 2022 | 8 | 2.3 ± 0.7 | 5.7 ± 1.0 | 5.8 ± 1.0 | 6.0 ± 1.0 | 10.22 | 1.9 ± 1.0 | 4.7 ± 3.0 | 4.8 ± 3.0 | 5.0 ± 3.2 | 8.4 |
| 18 May 2022 | 11 | 109 ± 4 | 11 ± 4 | 11 ± 4 | 11 ± 4 | 14.06 | 65.1 ± 22.7 | 6.6 ± 3.3 | 6.6 ± 3.3 | 6.6 ± 3.3 | 8.4 | |
| DST | 4 November 2022 | 1 | 2.0 ± 1.5 | 1.8 | 0.9 | 1.1 | 0.27 | 15.0 ± 9.9 | 13.5 | 6.8 | 8.3 | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abeywickrama, H.G.K.; Bajón-Fernández, Y.; Srinamasivayam, B.; Turner, D.; Rivas Casado, M. Monitoring CH4 Fluxes in Sewage Sludge Treatment Centres: Challenging Emission Underreporting. Remote Sens. 2024, 16, 2280. https://doi.org/10.3390/rs16132280
Abeywickrama HGK, Bajón-Fernández Y, Srinamasivayam B, Turner D, Rivas Casado M. Monitoring CH4 Fluxes in Sewage Sludge Treatment Centres: Challenging Emission Underreporting. Remote Sensing. 2024; 16(13):2280. https://doi.org/10.3390/rs16132280
Chicago/Turabian StyleAbeywickrama, Hiniduma Gamage Kavindi, Yadira Bajón-Fernández, Bharanitharan Srinamasivayam, Duncan Turner, and Mónica Rivas Casado. 2024. "Monitoring CH4 Fluxes in Sewage Sludge Treatment Centres: Challenging Emission Underreporting" Remote Sensing 16, no. 13: 2280. https://doi.org/10.3390/rs16132280
APA StyleAbeywickrama, H. G. K., Bajón-Fernández, Y., Srinamasivayam, B., Turner, D., & Rivas Casado, M. (2024). Monitoring CH4 Fluxes in Sewage Sludge Treatment Centres: Challenging Emission Underreporting. Remote Sensing, 16(13), 2280. https://doi.org/10.3390/rs16132280