
Range-Doppler-Time Tensor Processing for Deep-Space Satellite Characterization Using Narrowband Radar †

Abstract
1. Introduction
- Development of a novel RDT tensor processing technique for deep-space satellite characterization
- Quantitative performance assessment of the RDT tensor processing technique considering the impact of key parameters on characterization performance
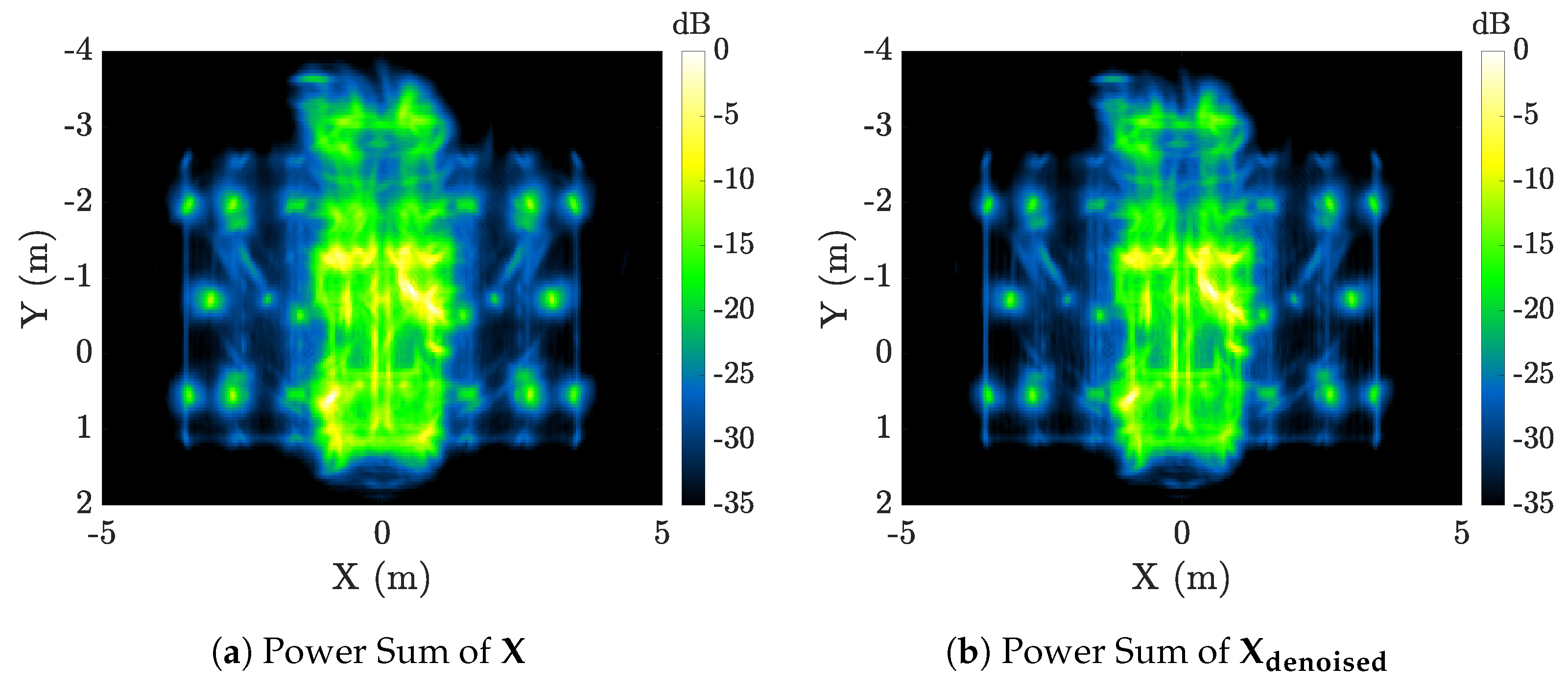
- Demonstration of extensions to the RDT tensor framework, including tensor denoising using the Higher-Order Singular Value Decomposition (HOSVD) to produce enhanced sensitivity images
2. Background on Radar Characterization of Space Objects
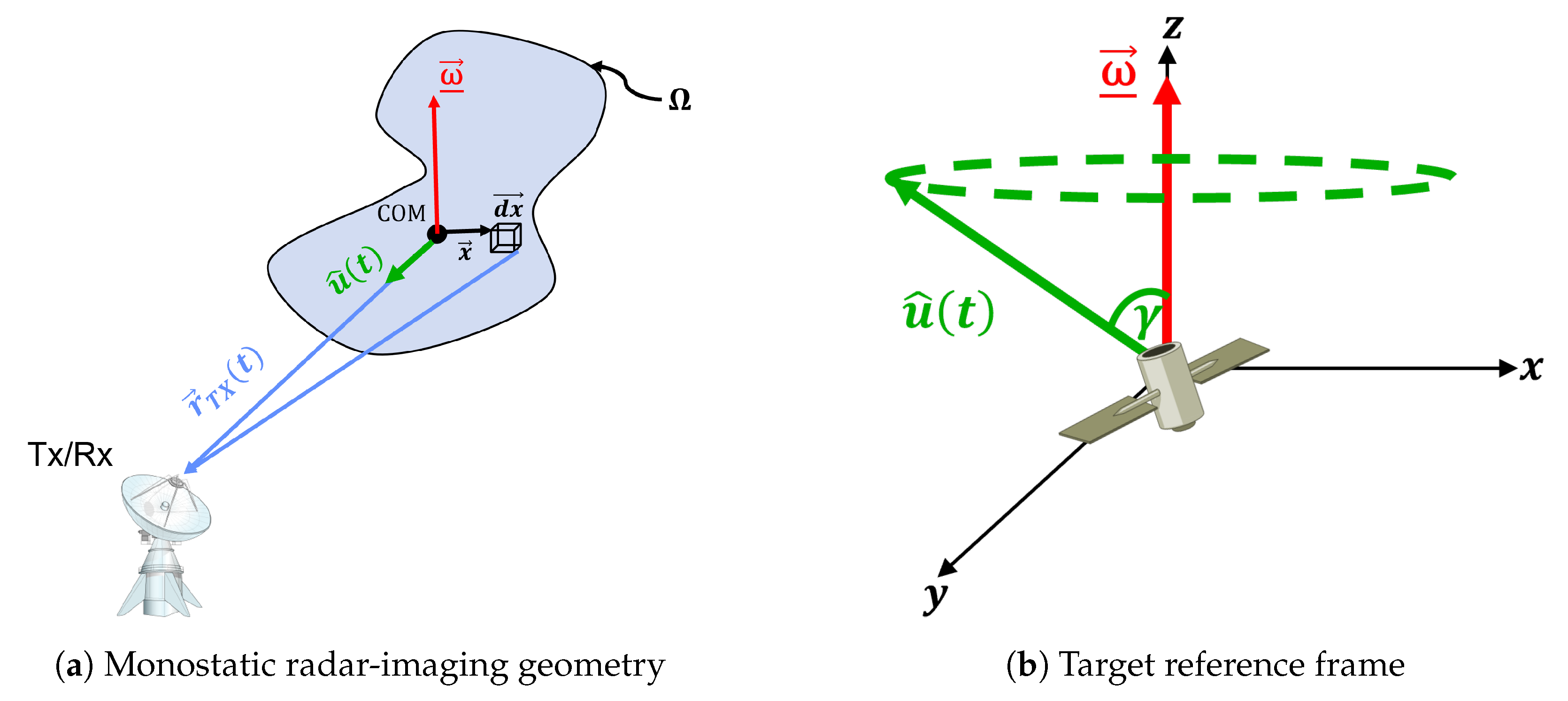
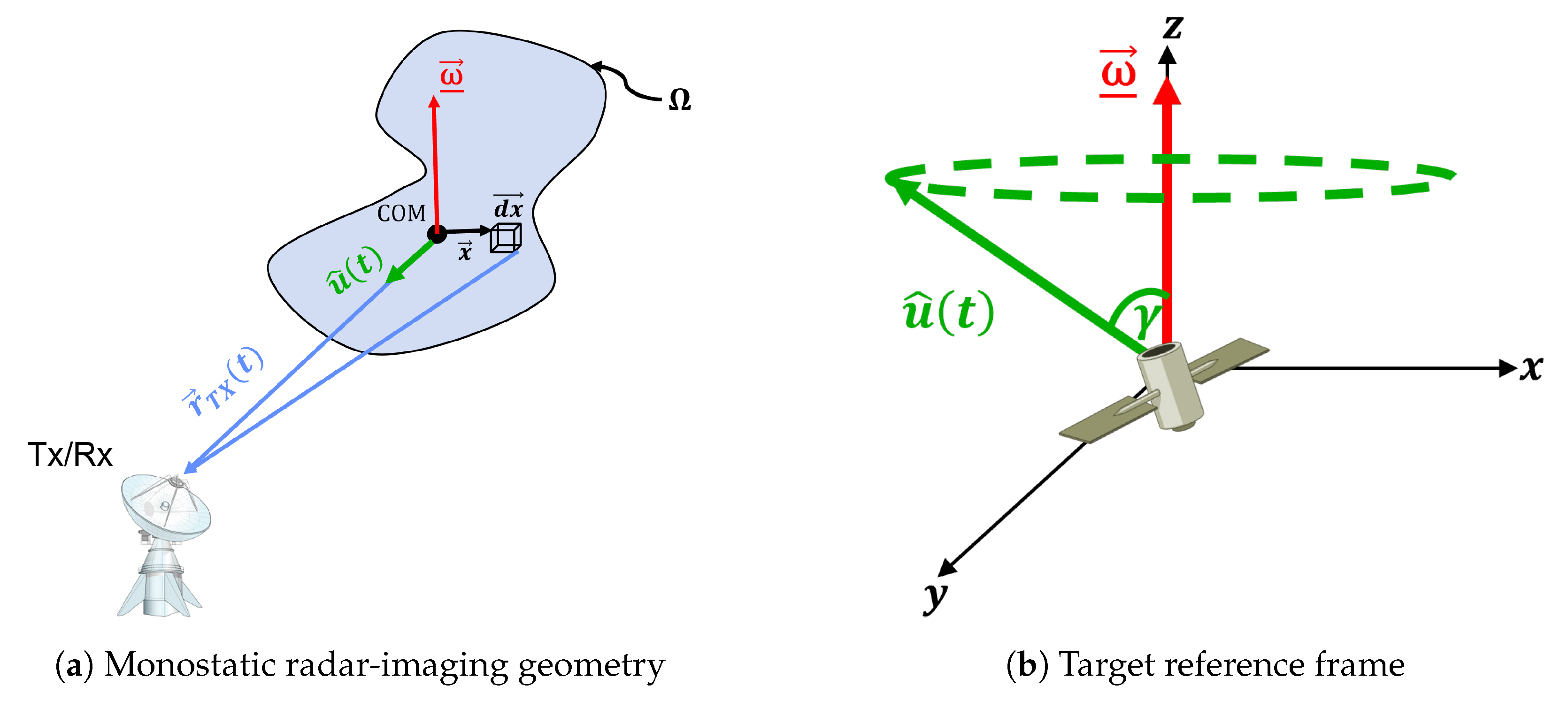
2.1. Radar Imaging Geometry
2.2. Radar-Return Signal Model
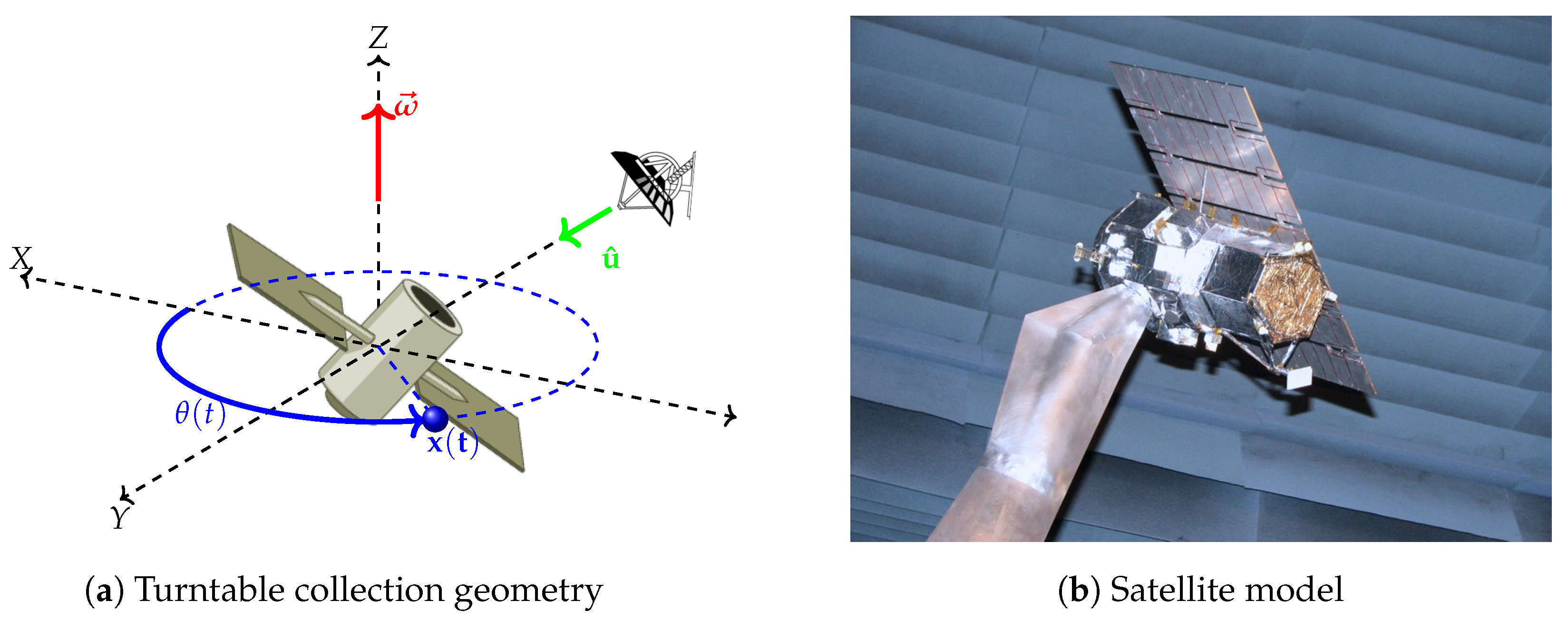
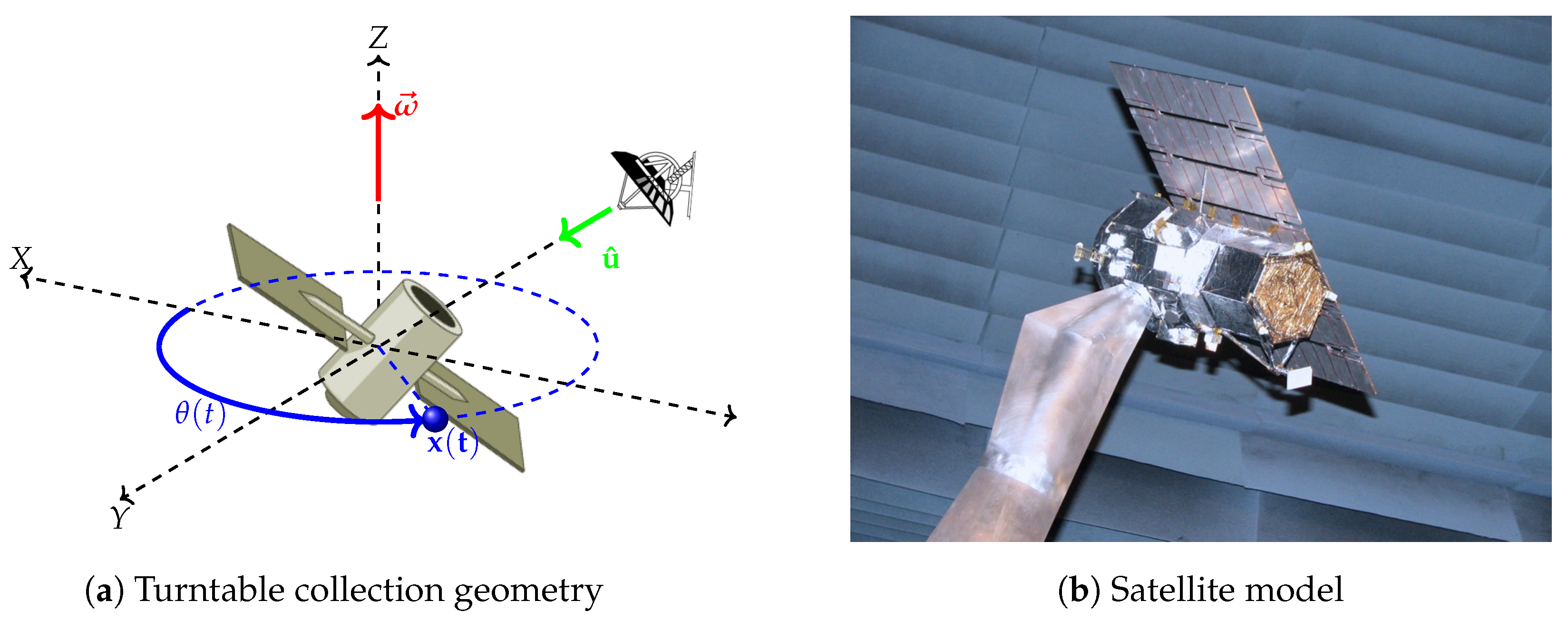
2.3. Compact-Range Satellite Model Case Study
2.4. Standard Radar-Characterization Processing
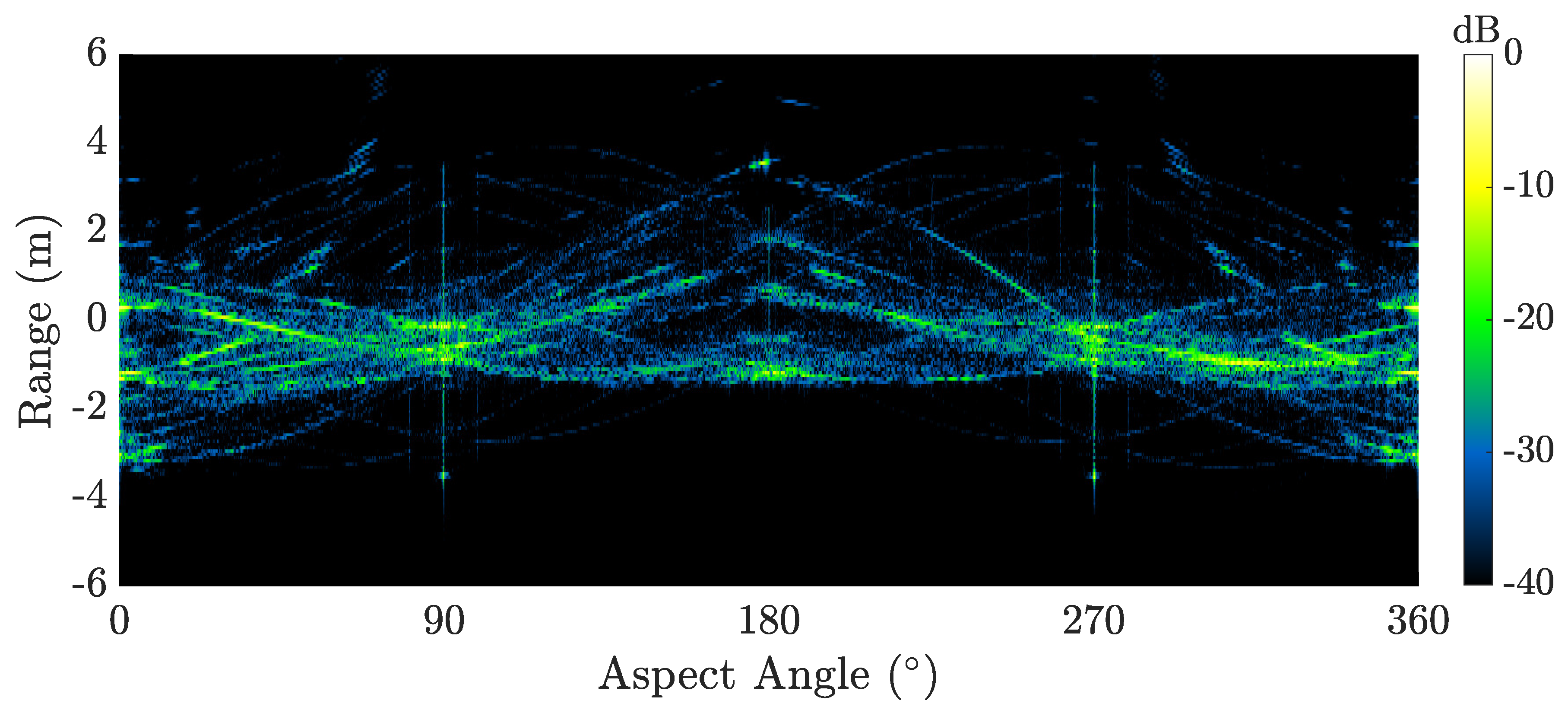
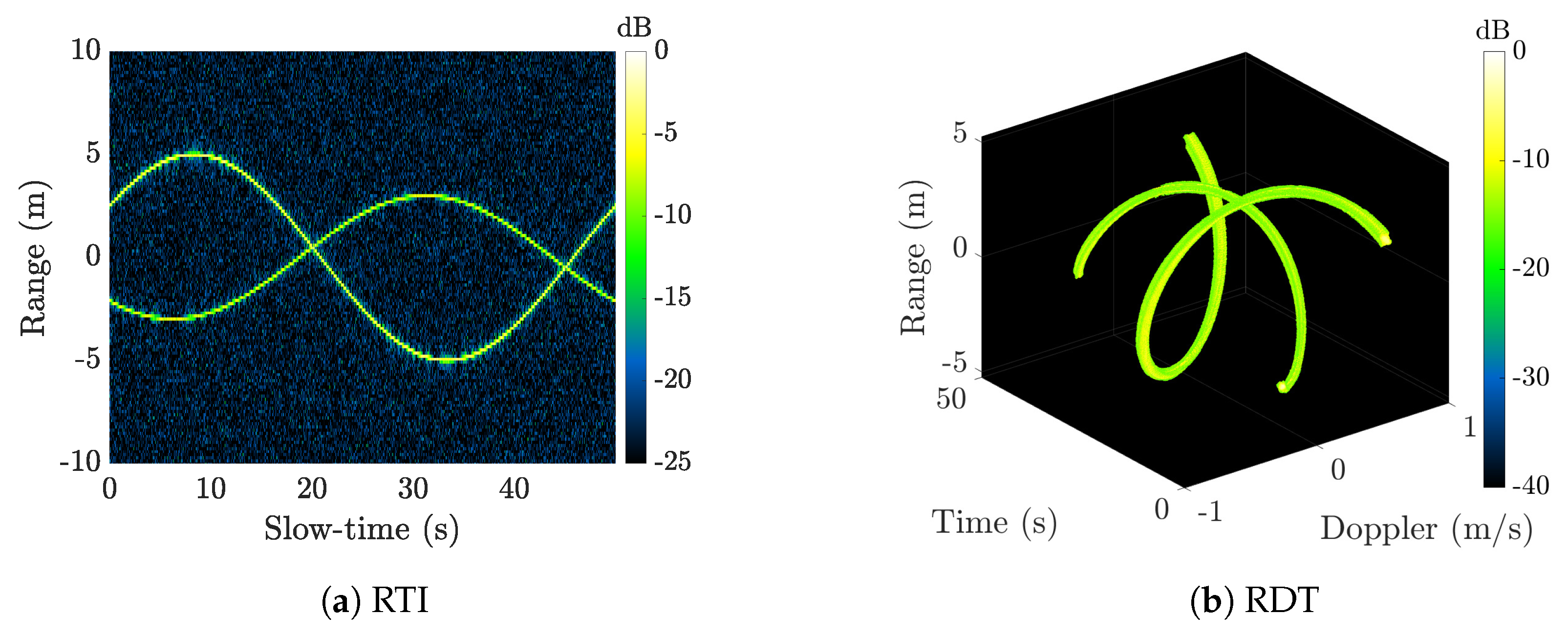
2.4.1. Range–Time Intensity (RTI)
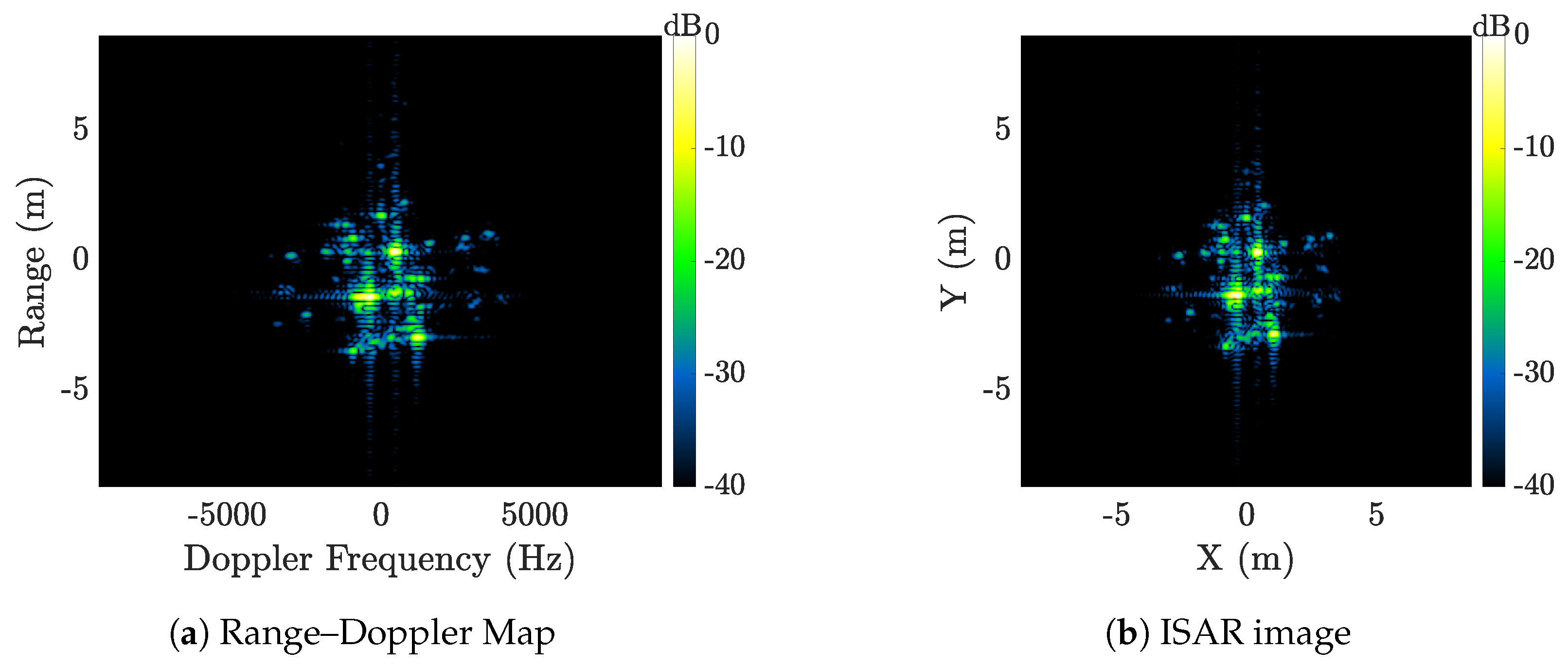
2.4.2. Range–Doppler Map (RDM)
2.4.3. Inverse Synthetic Aperture Radar (ISAR) Imaging
2.4.4. Doppler–Time Intensity (DTI)
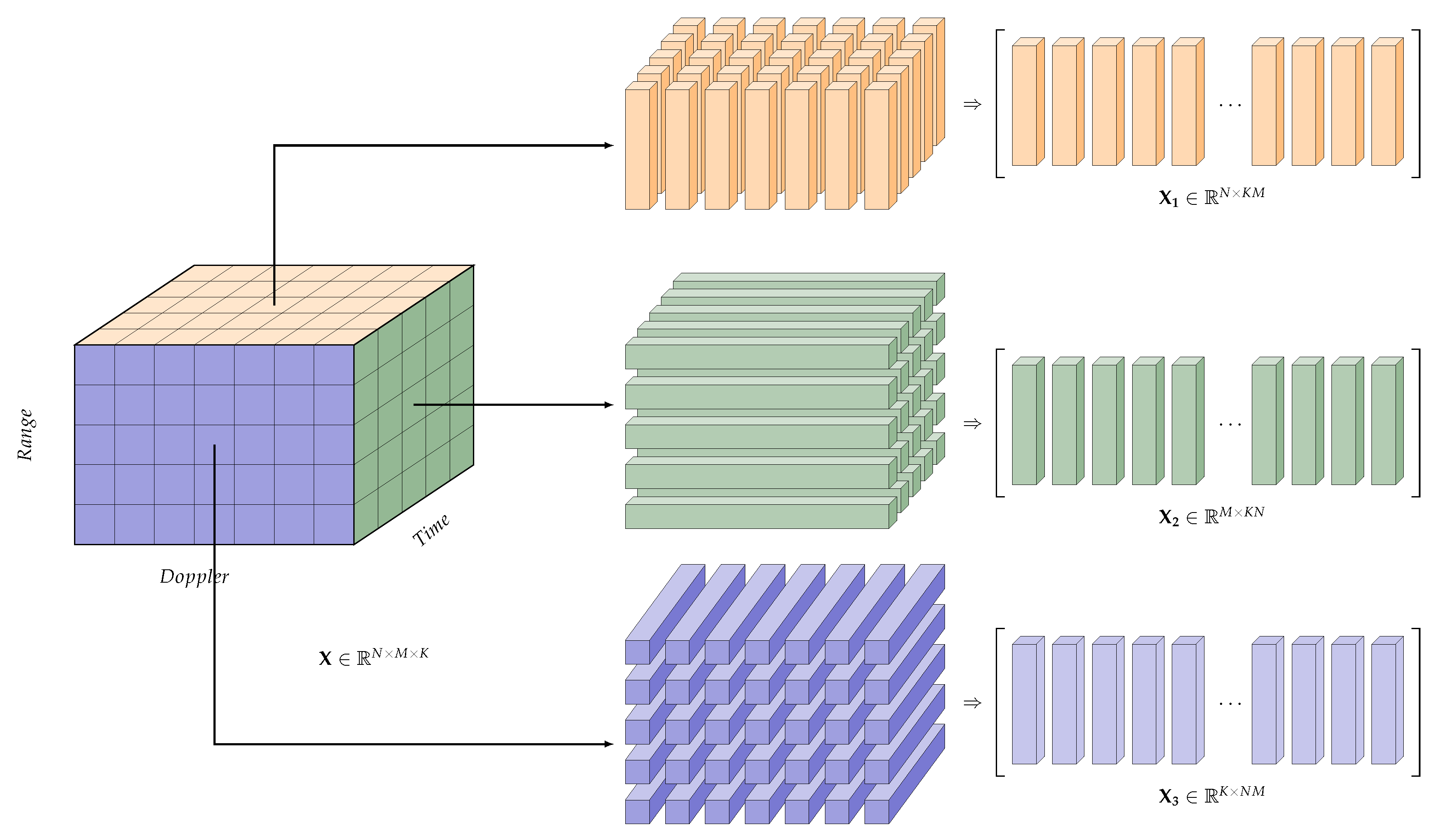
3. 3D Range-Doppler-time (RDT) Tensor Technique
3.1. Mathematical Description
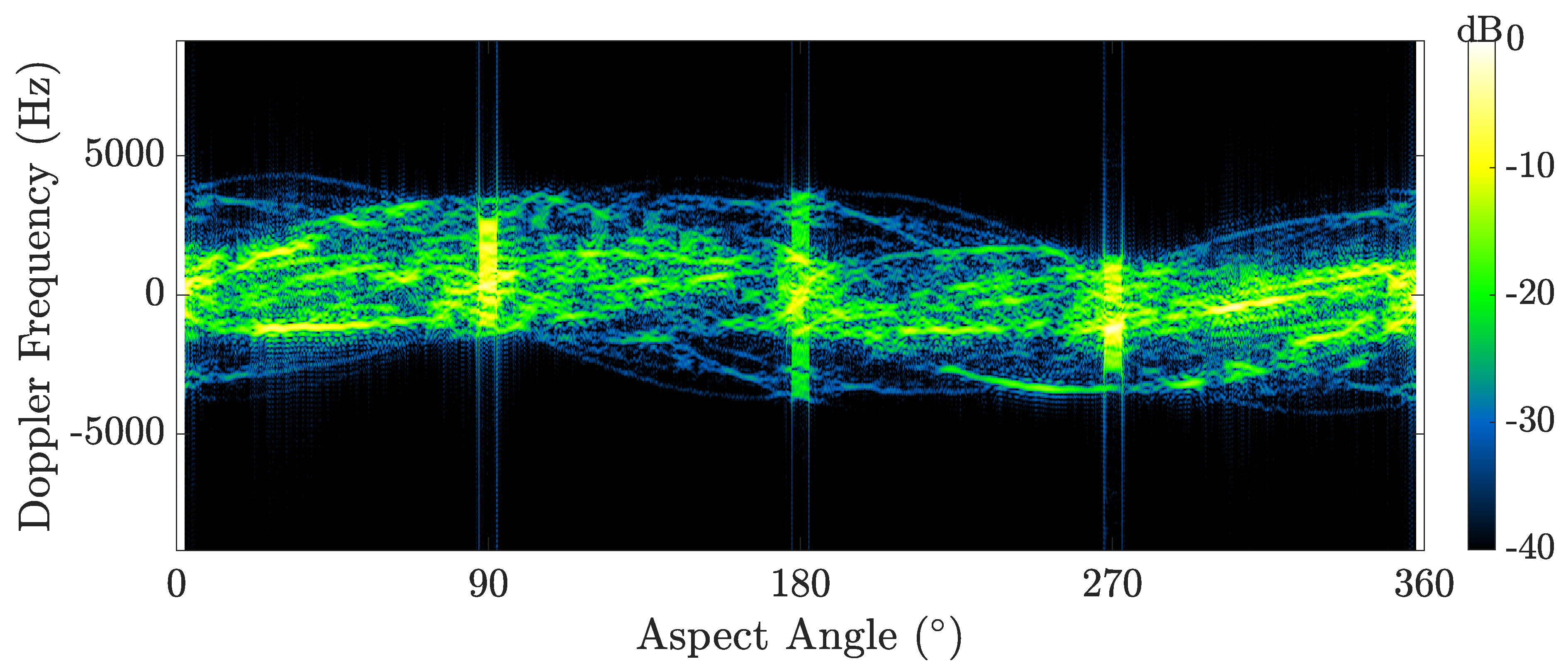
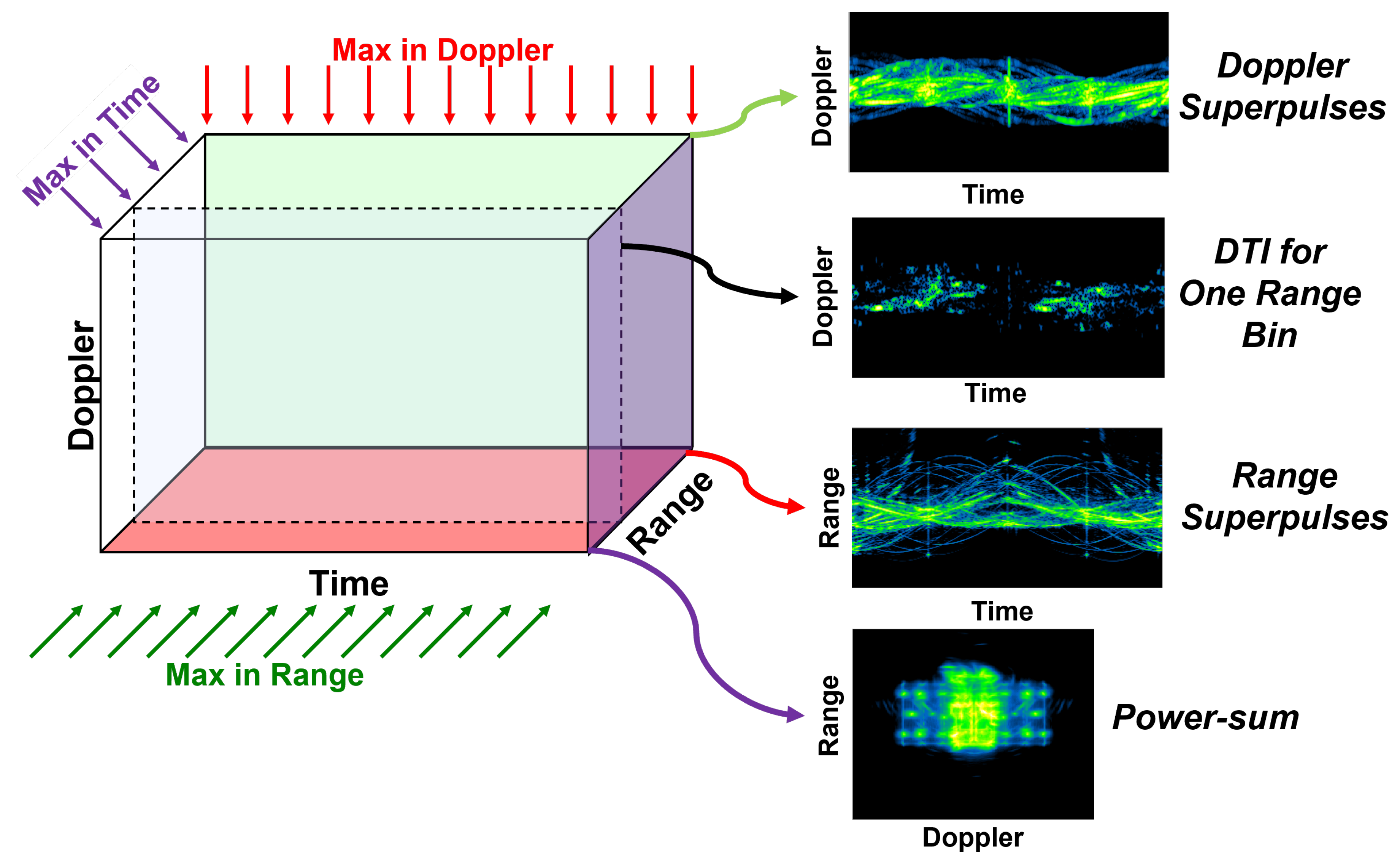
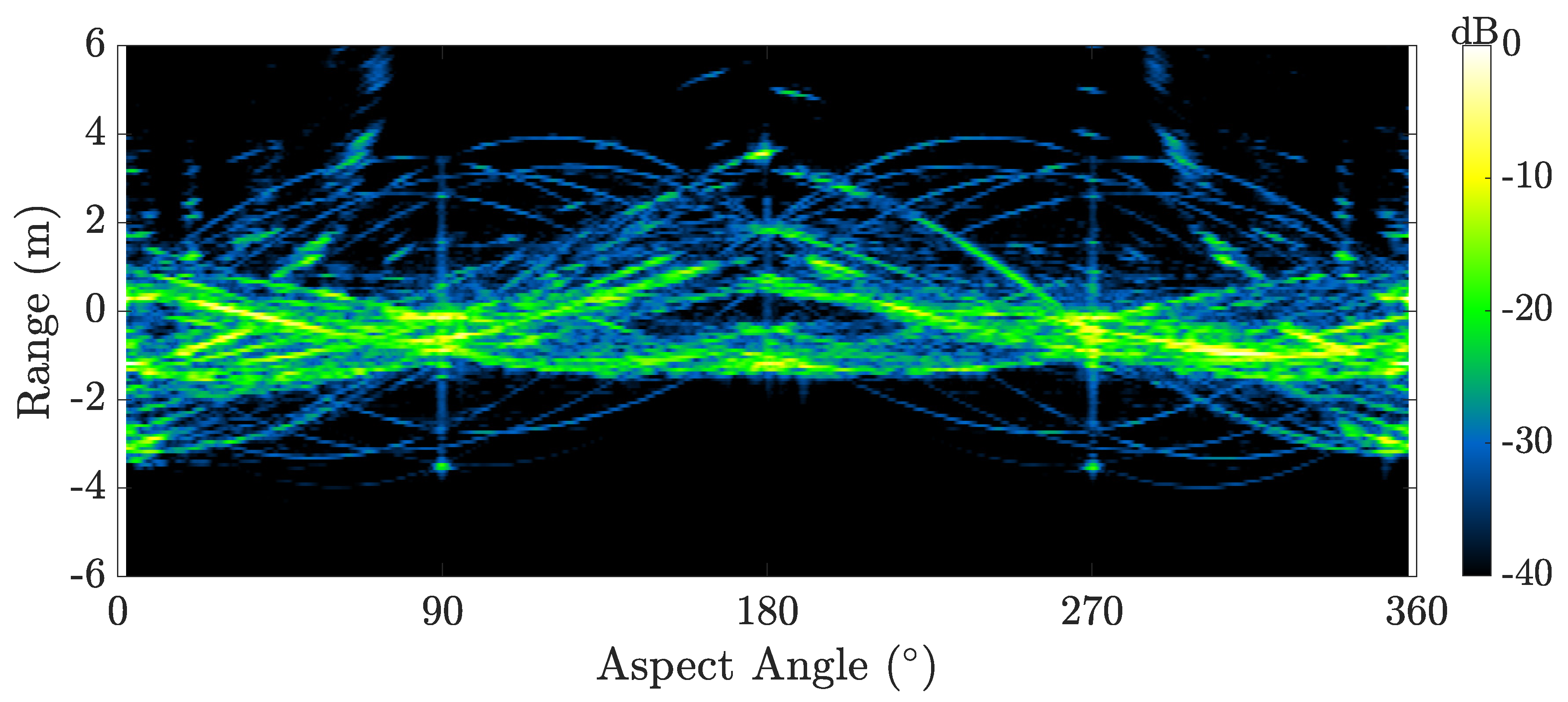
3.2. Range and Doppler Superpulses
3.3. Compressed Trajectory Representation and Rank-Reducing Transform
3.4. Power-Sum Image Reconstruction
3.4.1. Relation to Doppler Tomography
3.4.2. Relation to Bandwidth Enhanced Non-Coherent Imaging (BENI)
4. Performance Assessment of RDT Tensor Processing
4.1. Influence of Rotation-Rate Estimate
4.2. Influence of Integration Time
4.3. Transient Features
4.4. Resolvability of Features
4.5. Dynamic Motion: Precession and Non-Uniform Rotation
4.6. Unfavorable Imaging Geometries
5. Extensions to the RDT Tensor Technique
5.1. Rotational-Rate Estimation
5.2. RDT Tensor Denoising Using Higher-Order Singular Value Decomposition (HOSVD)
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BENI | Bandwidth Enhanced Non-Coherent Imaging |
| BWE | BandWidth Extrapolation |
| DTI | Doppler-Time Intensity |
| GEO | Geosynchronous Earth Orbit |
| HOSVD | Higher-Order Singular Value Decomposition |
| ISAR | Inverse Synthetic Aperture Radar |
| LECP | Local Extended Coherent Processing |
| LEO | Low Earth Orbit |
| LOS | Line-Of-Sight |
| MEO | Medium Earth Orbit |
| RDM | Range–Doppler Map |
| RDT | range-Doppler-time Tensor |
| RTI | Range–Time Intensity |
| SDA | Space Domain Awareness |
| SVD | Singular Value Decomposition |
Appendix A. Notation and Terminology
Appendix A.1. Derivation of ISAR Imaging Expression

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angular velocity vector (rad/s) | |
| Radar position relative to target center of mass (m) | |
| 3D scatterer (scattering element) position (m) | |
| Complex-valued radar scattering reflectivity density | |
| 3D volumetric support of target | |
| Radar line-of-sight unit vector | |
| Cross-range axis unit vector | |
| Tumble period (s) | |
| Rotation rate (rad/s) | |
| Tumble angle between line of sight and angular velocity (rad) | |
| Relative range of scatterer at (m) | |
| Range rate of scatterer at (m/s) | |
| Phase history data of the received signal | |
| Transmission frequency (Hz) | |
| Baseband frequency (Hz) | |
| Carrier frequency (Hz) | |
| Wavelength (m) | |
| B | Bandwidth (Hz) |
| T | Integration interval (s) |
| Integration angle (rad) | |
| Center of k-th Doppler-processing interval (s) | |
| Range resolution (m) | |
| Doppler resolution (m/s) | |
| Range–Time Intensity (RTI) | |
| Range–Doppler Map (RDM) | |
| Doppler–Time Intensity (DTI) | |
| 3D range-Doppler-time (RDT) tensor (continuous time) | |
| 3D range-Doppler-time (RDT) tensor (discrete time) | |
| Range superpulses | |
| Doppler superpulses | |
| Rank-reduced RDT tensor | |
| Power-sum image | |
| Doppler tomography image | |
| BENI image | |
| Position of scatterer in RDT space (m, m/s) | |
| Transformed position after rank-reducing transform (m, m) | |
| Rank-reducing transform matrix |
Appendix A.2. Derivation of Slant-Plane Image
References
- Sridharan, R.; Pensa, A. Perspectives in Space Surveillance; MIT Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Walker, J. Range-Doppler imaging of rotating objects. IEEE Trans. Aerosp. Electron. Syst. 1980, AES-16, 23–52. [Google Scholar] [CrossRef]
- Munson, D.; O’Brien, D.; Jenkins, W. A tomographic formulation of spotlight-mode synthetic aperture radar. Proc. IEEE 1983, 71, 917–925. [Google Scholar] [CrossRef]
- Swenson, A.T.; Nebelecky, C.K.; Wilkinson, D.; Crassidis, J.L. Resident Space Object Shape and Material Estimation using Polarimetric Data. In Proceedings of the AAS Guidance, Navigation and Control (GN&C Conference), Sopot, Poland, 12–16 June 2023; pp. 23–140. [Google Scholar]
- Dianetti, A.; Crassidis, J. Resident Space Object Characterization Using Polarized Light Curves. J. Guid. Control Dyn. 2022, 46, 1–18. [Google Scholar] [CrossRef]
- Anderson, J.D.; Anderson, A.J.; Zuehlke, D.A.; Canales, D.; Lovell, T.A. Resident Space Object Identification in Arbitrary Unresolved Space Images. In Proceedings of the Proceedings of the 33rd AAS/AIAA Space Flight Mechanics Meeting], AAS/AIAA, Austin, TX, USA, 15–19 January 2023. [Google Scholar]
- Suthakar, V.; Sanvido, A.A.; Qashoa, R.; Lee, R.S.K. Comparative Analysis of Resident Space Object (RSO) Detection Methods. Sensors 2023, 23, 9668. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Sahoo, D.; Hoi, S.C. Recent advances in deep learning for object detection. Neurocomputing 2020, 396, 39–64. [Google Scholar] [CrossRef]
- Massimi, F.; Ferrara, P.; Benedetto, F. Deep Learning Methods for Space Situational Awareness in Mega-Constellations Satellite-Based Internet of Things Networks. Sensors 2023, 23, 124. [Google Scholar] [CrossRef]
- Linares, R.; Furfaro, R. Space Object classification using deep Convolutional Neural Networks. In Proceedings of the 2016 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 5–8 July 2016; pp. 1140–1146. [Google Scholar]
- Jia, B.; Pham, K.; Blasch, E.; Wang, Z.; Shen, D.; Chen, G. Space object classification using deep neural networks. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Linares, R.; Furfaro, R.; Reddy, V. Space Objects Classification via Light-Curve Measurements Using Deep Convolutional Neural Networks. J. Astronaut. Sci. 2020, 67, 1063–1091. [Google Scholar] [CrossRef]
- Qashoa, R.; Lee, R. Classification of Low Earth Orbit (LEO) Resident Space Objects’ (RSO) Light Curves Using a Support Vector Machine (SVM) and Long Short-Term Memory (LSTM). Sensors 2023, 23, 6539. [Google Scholar] [CrossRef] [PubMed]
- Furfaro, R.; Linares, R.; Gaylor, D.; Jah, M.; Walls, R. Resident space object characterization and behavior understanding via machine learning and ontology-based bayesian networks. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 20–23 September 2016; p. 35. [Google Scholar]
- AlDahoul, N.; Karim, H.A.; De Castro, A.; Tan, M.J.T. Localization and classification of space objects using EfficientDet detector for space situational awareness. Sci. Rep. 2022, 12, 21896. [Google Scholar] [CrossRef]
- Serrano, A.; Morrison, R.L. Doppler Superpulse Processing for Improved Tomographic Characterization of Space Objects. In Proceedings of the 2023 IEEE International Applied Computational Electromagnetics Society Symposium (ACES), Monterey, CA, USA, 26–30 March 2023; pp. 1–2. [Google Scholar]
- Chua, C. Doppler-Only Synthetic Aperture Radar. Master’s Thesis, Naval Postgraduate School, Monterey, CA, USA, 2006. [Google Scholar]
- Androsov, A.; Vygon, V.; Ustinov, N. Reconstruction of images of rotating bodies of arbitrary angular dimensions. I. Structure of Doppler spectra and reconstruction of images from projections. Sov. J. Quantum Electron. 1985, 15, 168–172. [Google Scholar] [CrossRef]
- Marino, R.; Capes, R.; Keicher, W.; Kulkarni, S.; Parker, J.; Swezey, L. Tomographic image reconstruction from laser radar reflective projections. In Proceedings of the Proc. SPIE 0999; Laser Radar III; SPIE: Bellingham, WA, USA, 1989; pp. 248–268. [Google Scholar]
- Chen, V. Analysis of radar micro-Doppler with time-frequency transform. In Proceedings of the Tenth IEEE Workshop on Statistical Signal and Array Processing, Pocono Manor, PA, USA, 16 August 2000; pp. 463–466. [Google Scholar]
- Coetzee, S.; Baker, C.; Griffiths, H. Narrow band high resolution radar imaging. In Proceedings of the 2006 IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006; pp. 622–625. [Google Scholar]
- Mensa, D.L.; Halevy, S.; Wade, G. Coherent Doppler tomography for microwave imaging. Proc. IEEE 1983, 71, 254. [Google Scholar] [CrossRef]
- Das, Y.; Boerner, W. On radar target shape estimation using algorithms for reconstruction from projections. IEEE Trans. Antennas Propag. 1978, AP-26, 274–279. [Google Scholar] [CrossRef]
- Bai, X.; Sun, G.; Wu, Q.; Xing, M.; Bao, Z. Narrow-band radar imaging of spinning targets. Sci. China Inf. Sci. 2011, 54, 873–883. [Google Scholar] [CrossRef]
- Lanterman, A.; Munson, D.; Wu, Y. Wide-angle radar imaging using time–frequency distributions. IEE Proc.-Radar Sonar Navig. 2003, 150, 203–211. [Google Scholar] [CrossRef]
- Sun, H.; Feng, H.; Lu, Y. High resolution radar tomographic imaging using single-tone CW signals. In Proceedings of the 2010 IEEE Conference on Radar, Lecce, Italy, 21–25 June 2010; pp. 975–980. [Google Scholar]
- McCoy, J.; Magotra, N.; Chang, B. Coherent Doppler tomography—A technique for narrow band SAR. IEEE Aerosp. Electron. Syst. Mag. 1991, 6, 19–22. [Google Scholar] [CrossRef] [PubMed]
- Serrano, A.; Morrison, R.L. BENI: Bandwidth Enhanced Noncoherent Imaging of Rotating Objects. In Proceedings of the 2022 IEEE Radar Conference (RadarConf22), New York, NY, USA, 21–25 March 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Serrano, A.; Kobsa, A.; Uysal, F.; Cerutti-Maori, D.; Ghio, S.; Kintz, A.; Morrison, R.L., Jr.; Welch, S.; van Dorp, P.; Hogan, G.; et al. Long baseline bistatic radar imaging of tumbling space objects for enhancing space domain awareness. IET Radar Sonar Navig. 2023. [Google Scholar] [CrossRef]
- Uysal, F.; Dorp, P.v.; Serrano, A.; Kobsa, A.; Ghio, S.; Kintz, A.; Bassa, C.; Garrington, S.; Cuenca, M.C.; Otten, M.; et al. Large Baseline Bistatic Radar Imaging for Space Domain Awareness. In Proceedings of the 2023 IEEE International Radar Conference (RADAR), Sydney, Australia, 6–10 November 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Benson, C.J.; Naudet, C.J.; Lowe, S.T. Radar Study of Inactive Geosynchronous Earth Orbit Satellite Spin States. Interplanet. Prog. Rep. 2020, 42, 1–14. [Google Scholar]
- Coulombe, M.J.; Horgan, T.; Waldman, J.; Neilson, J.; Carter, S.; Nixon, W. A 160 GHz Polarimetric Compact Range for Scale Model RCS Measurements. In Proceedings of the Antenna Measurements and Techniques Association (AMTA), Seattle, WA, USA, 30 September–3 October 1996; p. 239. [Google Scholar]
- High Fidelity Satellite Model in STL Radar Range. Available online: https://www.uml.edu/research/stl/ (accessed on 30 September 2023).
- Kak, A.; Slaney, M. Principles of Computerized Tomographic Imaging; IEEE Press: New York, NY, USA, 1988. [Google Scholar]
- Borison, S.; Bowling, S.; Cuomo, K. Super-resolution methods for wideband radar. Linc. Lab. J. 1992, 5, 441–461. [Google Scholar]
- Ausherman, D.; Kozma, A.; Walker, J.; Jones, H.; Poggio, E. Developments in radar imaging. IEEE Trans. Aerosp. Electron. Syst. 1984, AES-16, 363–398. [Google Scholar] [CrossRef]
- Xing, Y.; You, P.; Yong, S. Parameter Estimation of Micro-Motion Targets for High-Resolution-Range Radar Using Online Measured Reference. Sensors 2018, 18, 2773. [Google Scholar] [CrossRef]
- Yang, Q.; Deng, B.; Wang, H.; Qin, Y. Parameter Estimation and Image Reconstruction of Rotating Targets with Vibrating Interference in the Terahertz Band. J. Infrared Millim. Terahertz Waves 2017, 38, 909–928. [Google Scholar] [CrossRef]
- Zhang, W.; Li, K.; Jiang, W. Parameter Estimation of Radar Targets with Macro-Motion and Micro-Motion Based on Circular Correlation Coefficients. IEEE Signal Process. Lett. 2015, 22, 633–637. [Google Scholar] [CrossRef]
- Bogert, B.P.; Healy, M.J.; Tukey, J.W. The quefrency analysis of time series for echoes: Cepstrum, pseudo-autocovariance, cross-cepstrum and saphe cracking. In Proceedings of the Symposium on Time Series Analysis, Providence, RI, USA, 11–14 June 1963. [Google Scholar]
- Oppenheim, A.; Schafer, R. From frequency to quefrency: A history of the cepstrum. IEEE Signal Process. Mag. 2004, 21, 95–106. [Google Scholar] [CrossRef]
- Lee, J.K.; Kabrisky, M.; Oxley, M.E.; Rogers, S.K.; Ruck, D.W. The complex cepstrum applied to two-dimensional images. Pattern Recognit. 1993, 26, 1579–1592. [Google Scholar] [CrossRef]
- Ghio, S.; Martorella, M. Estimation of Rotating RSO Parameters using Radar Data and Joint Time-Frequency Transforms. In Proceedings of the 7th Eur Conf. Space Debris, Darmstadt, Germany, 18–21 April 2017. [Google Scholar]
- Ghio, S.; Martorella, M.; Staglianò, D.; Petri, D.; Lischi, S.; Massini, R. Practical implementation of the spectrogram-inverse Radon transform based algorithm for resident space objects parameter estimation. IET Sci. Meas. Technol. 2019, 13, 1254–1259. [Google Scholar] [CrossRef]
- Ghio, S.; Martorella, M.; Staglianò, D.; Petri, D.; Lischi, S.; Massini, R. Experimental Comparison of Radon Domain Approaches for Resident Space Object’s Parameter Estimation. Sensors 2021, 21, 1298. [Google Scholar] [CrossRef] [PubMed]
- De Lathauwer, L.; De Moor, B.; Vandewalle, J. A Multilinear Singular Value Decomposition. SIAM J. Matrix Anal. Appl. 2000, 21, 1253–1278. [Google Scholar] [CrossRef]
- Kolda, T.G.; Bader, B.W. Tensor Decompositions and Applications. SIAM Rev. 2009, 51, 455–500. [Google Scholar] [CrossRef]
- Kolda, T.G.; Bader, B.W.; Acar Ataman, E.N.; Dunlavy, D.; Bassett, R.; Battaglino, C.J.; Plantenga, T.; Chi, E.; Hansen, S. Tensor Toolbox for MATLAB v. 3.5; MathWorks Company: Portola Valley, CA, USA, 2023. [Google Scholar]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Serrano, A.; Capper, J.; Morrison, R.L., Jr.; Abouzahra, M.D. Range-Doppler-Time Tensor Processing for Deep-Space Satellite Characterization Using Narrowband Radar. Remote Sens. 2024, 16, 1374. https://doi.org/10.3390/rs16081374
Serrano A, Capper J, Morrison RL Jr., Abouzahra MD. Range-Doppler-Time Tensor Processing for Deep-Space Satellite Characterization Using Narrowband Radar. Remote Sensing. 2024; 16(8):1374. https://doi.org/10.3390/rs16081374
Chicago/Turabian StyleSerrano, Alexander, Jack Capper, Robert L. Morrison, Jr., and Mohamed D. Abouzahra. 2024. "Range-Doppler-Time Tensor Processing for Deep-Space Satellite Characterization Using Narrowband Radar" Remote Sensing 16, no. 8: 1374. https://doi.org/10.3390/rs16081374
APA StyleSerrano, A., Capper, J., Morrison, R. L., Jr., & Abouzahra, M. D. (2024). Range-Doppler-Time Tensor Processing for Deep-Space Satellite Characterization Using Narrowband Radar. Remote Sensing, 16(8), 1374. https://doi.org/10.3390/rs16081374