1. Introduction
Since the concept of a structural control was proposed [
1,
2,
3], it has been widely used to improve the performance of buildings under various excitations, especially for those in earthquake-prone areas. In recent years, the introduction of inerters, a novel mechanical element [
4], further developed the control strategies. A large number of inerter-based vibration control systems have emerged [
5,
6,
7,
8,
9].
An inerter is a two-terminal element, generating a resisting force proportional to the acceleration difference between its two ends, which is a significant difference with the traditional one-node mass whose inertial force is dependent on absolute acceleration. The liquid mass pump developed by Kawamata [
10] in the 1970s is regarded as the bud of the two-terminal inerter element and was initially utilized as an auxiliary mass to modify the natural frequency of the structure for its high inertial resistance. In 1999, a ball screw viscous damper proposed by Arakaki [
11,
12], called the rotary damping system, utilized the ball screw mechanism to enhance the damping effect, while the benefits of its mass amplification effect were not used intentionally. Subsequently, researchers found that combing the inerter in series or parallel with springs and damping elements could achieve a better energy dissipation capability. Ikago and his coworkers [
5,
13,
14] proposed a tuned viscous mass damper (TVMD), which is the first to make full use of its damping enhancement effect and mass amplification effect. These devices, similar to the TVMD, combing the inerters, damping elements, and springs together for vibration control, are called the inerter system [
15,
16] or an inerter-based damper [
17]. Various studies on the topological combinations of the inerter system [
18] and their composition parameter optimizations [
9,
16,
19] have been published.
The inerter element with the mass magnification effect can connect the mass of a traditional tuned mass damper to the structure, making the tuned mass damper lightweight and so its performance improves [
20,
21,
22]. Meanwhile, due to its excellent damping capacity, the inerter system can serve as a damper element substituting the traditional damper in vibration control systems, such as a traditional tuned mass damper [
23], and base isolation systems [
24,
25,
26]. The performance improvements introduced by the inerter element and inerter system have been verified.
Indeed, without being combined with other vibration control systems, taking advantage of the damping enhancement and mass magnification effects, the inerter system still prevails over traditional control strategies in terms of achieving a lightweight and efficient structural control performance. In 2012, Ikago et al. [
5] provided a tuning design formula for a single-degree-of-freedom (SDOF) structure equipped with the TVMD based on the fixed-point method and verified the TVMD seismic control effect through shaking table tests. In [
27,
28], Ikago et al., using sequential quadratic programming, studied the distribution and parameter optimizations of the TVMDs installed on each story of a multiple-degree-of-freedom (MDOF) structure, and further simplified the design by assuming the distribution of the masses of the TVMDs were proportional to the stiffness of each story. In 2014, through a modal analysis and a numerical example, Lazar et al. [
6] studied the tuned inerter damper (TID), one of the typical inerter systems, and illustrated that the best installation location is the bottom layer. Wen et al. [
29] studied the distributions and parameter optimizations of the TVMD and the TID considering multi-modal seismic control and verified their effectiveness. Pan and Zhang [
15,
16] studied the closed-form response of SDOF structures equipped with three typical inerter systems, respectively, and provided a demand-based parametric design method. In [
19], they found the damping enhancement equation and clarified the damping enhancement effects’ fundamental principle.
Besides, some research considering the cost of the inerter systems has been carried out as well. The cost of the inerter system is mainly related to its control force and parameter requirements. In [
6], the authors pointed out that due to the inter-story installation scheme, to obtain an identical structural control performance with the tuned mass damper, the apparent mass and damping coefficient requirement of the TID needed to be enlarged, consequently causing the force exerted from the TID on the structure to increase. Considering the potentially increased cost of the inerter system, Taflanidis et al. [
7] proposed a trade-off solution. They developed a dual-objective design approach for the structure equipped with a different inerter system, giving Pareto optimality between the structural control performance and the control force of the inerter system. Zhang et al. [
30] confirmed that two inerter systems, instead of a single one, installed at the bottom story could reduce the size and control force of the device, thus facilitating the manufacture and improving the structural control performance at the same time. However, using the Pareto optimality to reduce the control force of the inerter system is based on sacrificing the control performance. Utilizing multiple inerter systems, being equipped at each story or concentrated at the bottom layer, to meet various optimization goals, requires many quantities and types of inerter systems, which will still increase the overall cost. Indeed, improving the utilization efficiency of the inerter system is an effective way to reduce its cost.
For improving the utilization efficiency of the inerter system, instead of utilizing the structural shear deformation between consecutive layers, different installation schemes considering the vibration characteristics of the structure have been studied. Asai et al. [
31] proposed outrigger TVMDs utilizing the bending deformation instead of the shear deformation of high-rise structures. Ogino and Sumiyama [
32] confirmed the high performance of the practical application of the TVMDs installed across three layers using a chevron steel brace in a 37-story building. Additionally, proposing to connect the inerter to a toggle brace, Hwang et al. [
33] were the first to use the support with an amplification effect to enhance the efficiency of the inerter. However, the outrigger TVMD is only suitable for outrigger structures. The chevron steel brace and toggle brace are inevitably bulky due to buckling issues. Besides, it is inconvenient to adjust the displacement transition ratio of the chevron steel brace, which results in different sizes of inerter which are needed to achieve an optimal distribution of the inerter systems.
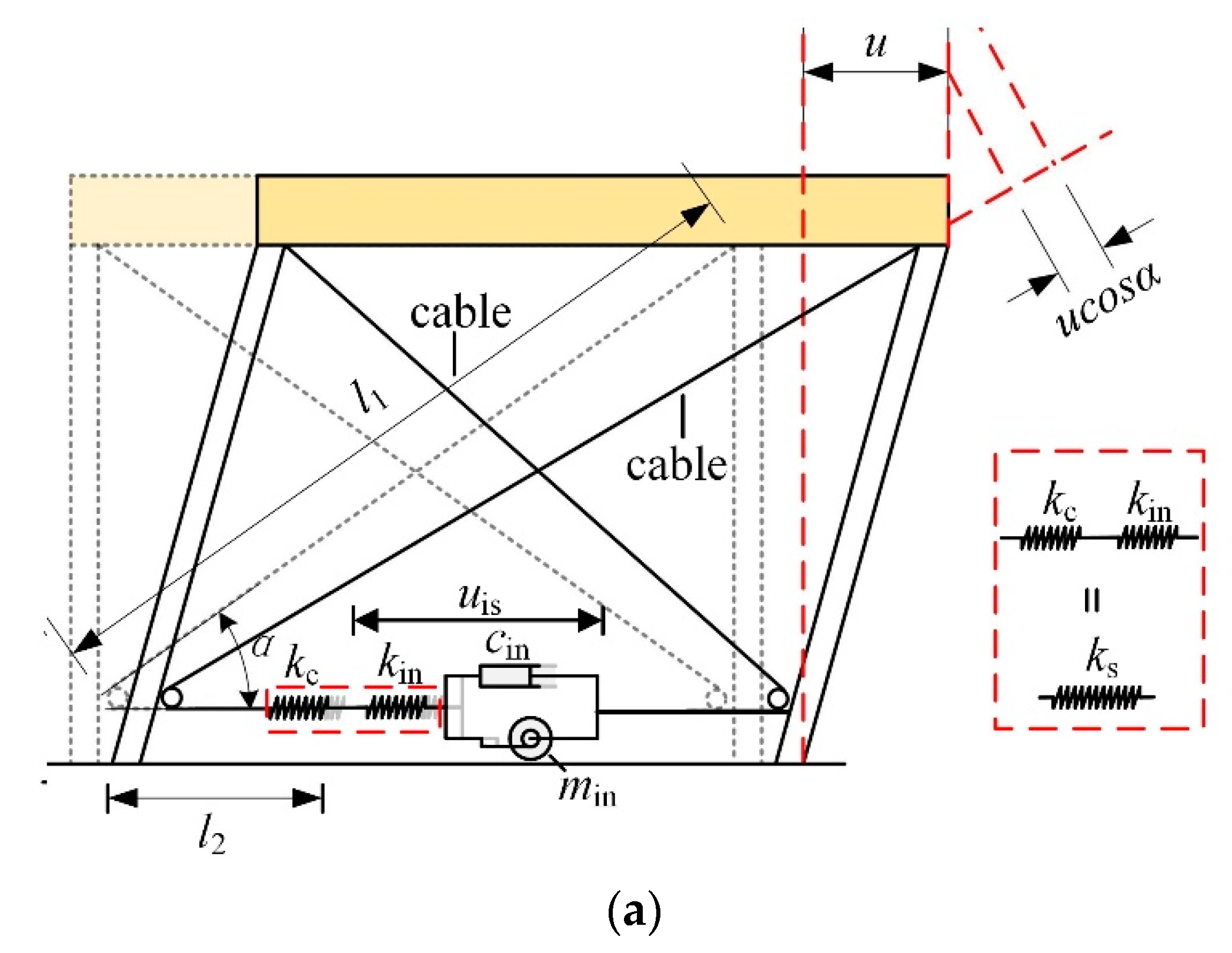
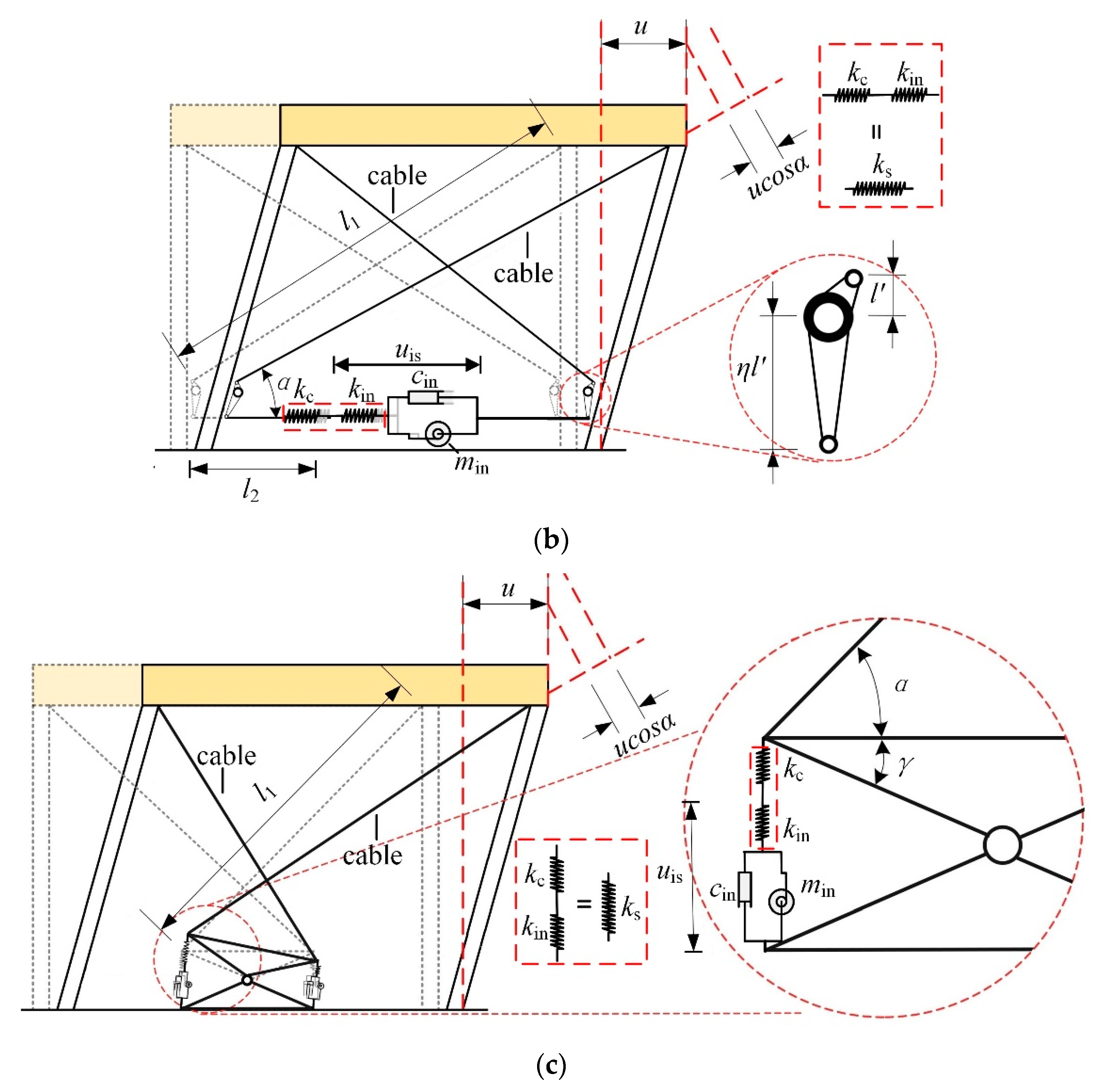
In contrast, the cable-bracing system has advantages in terms of being lightweight due to its tension-only and adjustability characteristics. Xie et al. [
34] proposed a cable-bracing inerter system (CBIS), supporting the inerter system with a simple cable-bracing system, and illustrated its advantages in terms of installation convenience and end constraint release. Sorace and Terenzi [
35,
36] studied a damped cable system, utilizing prestressed cables to connect fluid viscous spring-dampers and the structure. Utilizing pretensioned rods combined with levers, Aly et al. [
37] developed interlayer bracings and outer bracings to connect the magneto–rheological dampers between layers and between the ground and a specific layer, respectively. Kang [
38] combined the pretensioned cables with a seesaw member and proposed a cable-bracing seesaw system to support a pair of fluid dampers. The cable-bracing seesaw system connecting the grounded dampers directly to the top story exhibited an excellent damping performance.
Making full use of the characteristics of the CBIS and maximizing its utilization efficiency, in this paper, a cross-layer installed CBIS (CICBIS), able to cross more layers and suitable for shear-type MDOF structures, is proposed. The displacement transition ratios of three typical cable-bracing systems are established first and compared with each other. Deriving the equivalent two-degree-of-freedom system of the MDOF structure equipped with CBIS considering the installation scheme, the effective inerter-mass ratio is defined to quantify the utilization efficiency of the CBIS. Based on the demand-based design, a design flow is proposed for the MDOF equipped with CBISs. A 10-story benchmark model is applied to illustrate the proposed design flow. Two types of CICBISs and inter-layer-installed CBISs (IICBISs) are designed separately. The control performance of the designed CBISs is compared with each other through a frequency-domain and time-domain analysis. Finally, the time history analysis of the displacement of the inerter system and its damping element is carried out to investigate the damping enhancement effect of the designed inerter system.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}