1. Introduction
Recently, the study and analysis of direct current (DC) networks have increased, due to the development of power electronics, advances in renewable generation, and the advantages over alternative current (AC) networks [
1,
2]. Initially, the DC networks began to operate at high-level voltages in the power transmission for long-distance between systems, since it allows for reducing transmission power losses, enhancing grid stability systems, easily incorporating off-shore wind systems, and managing power flow both direction simply [
3,
4,
5]. Consecutively, the integration of the DC networks has been widened to medium- and low-voltage level applications, generating concepts, such as the microgrids [
6,
7].
The main advantages of DC systems as compared to conventional AC systems can be summarized, as follows: (i) fewer power converter devices, (ii) no requirement of synchronizing generators, (iii) better voltage profiles, (iv) less power losses, and (v) do not require frequency and reactive power analysis and controls [
8,
9,
10].
Two kinds of analysis are used to study DC networks. The first analysis is dynamic, being performed under the time domain, and integrates concepts as primary and secondary controllers [
11,
12]. The second analysis is static, which computes all of the state variables under stationary conditions. This analysis is known as tertiary control [
13], which addresses power flow analysis [
2,
14], optimal power flow [
15], economic dispatch strategies [
16], and voltage stability analysis [
17,
18]. Furthermore, these analyses are integrated with other problems, such as the placement and sizing of multiple distributed generators (DGs) [
19], as well as placement and operation of battery energy storage systems in DC networks [
20].
In this study, we focus on the problem of the optimal placement and sizing of DGs in DC networks. Although, in the specialized literature, there are few approaches in this area. In [
21], an analytical methodology for sizing energy storage systems in DC networks was proposed. This methodology evaluated the profiles of currents that were injected by energy storage systems in order to minimize power losses. In [
22], a feasibility study for the integration of photovoltaic systems in a standalone building was carried out. This study considered strong weather scenarios for off-grid systems and variable electricity prices for the grid-connected system. In [
23], a probabilistic optimization methodology for estimating uncertainties in loads, plug-in electric vehicles, and renewable generation in DC distribution networks was analyzed. In [
19], a hybrid strategy for optimal location and dimensioning of DGs in DC grids was provided, which mixed a hyperplanes search method (HSM) with semidefinite programming (SDP) model. The HSM relaxed the binary variables, while the SDP computed the optimal power flow. In [
24], a similar strategy using a sequential quadratic optimal power flow was presented. Both of the techniques ensure the optimal global solution only for a relaxed problem, where the complexity lies in the number of candidate solutions to recover the binary variables. In [
25], a tutorial in the general algebraic modeling system (GAMS) for the optimal placement and dimensioning of DGs in DC grids were presented. In [
26], the optimal placement and sizing of photovoltaic generators in DC networks were carried out, when considering an environmental-economic dispatch as an objective function. However, the approach presented in [
26] was solved in GAMS, which does not guarantee the optimal global solution, since the problem is nonlinear non-convex mixed-integer. In [
27], three metaheuristic methods for optimal location and dimensioning of DGs in DC systems were studied. A classical genetic algorithm was employed in the locations stage, which assigns the location of the DGs. While the black-hole, continuous genetic algorithm, and particle swarm metaheuristic methods were used to dimension the DGs. The main problem with these methods is that they have multiple tuning parameters that significantly affect their performance. Additionally, they do not ensure the optimal global solution to the problem. In [
28], a methodology for optimal sizing of multiple devices, such as wind turbines, photovoltaic sources, and batteries in hybrid AC/DC grids was provided, which considered the life cycle cost and the life span of the renewable energy resources in the objective function.
After the revision mentioned above of the state-of-the-art, this research’s main contributions can be summarized, as follows:
- 🗸
The reformulation of the problem of the optimal placement and sizing of DGs in DC networks that allows transforming the original mixed-integer nonlinear programming (MINLP) model into a mixed-integer second-order cone programming (MI-SOCP) one.
- 🗸
The solution of the proposed MI-SOCP model with a hybrid master-slave optimization methodology, where the master stage is guided by a genetic algorithm to determine the best locations for the DGs, while the slave stage allows for solving the optimal power flow problem by using the SOCP formulation via interior point methods to determine the best sizes of the DGs.
- 🗸
The computational results demonstrate that the hybrid GA-SOCP approach has an efficiency higher than 70% to find the global optimal solution in both test feeders analyzed. In addition, the proposed approach presents better solutions than commercial solvers available in GAMS and classical metaheuristics such as genetic algorithms and particle swarm optimizer, and derived approaches
It is worth mentioning that the master–slave hybrid GA-SOCP approach has not previously been proposed in specialized literature for addressing the problem of the optimal placement and sizing of DGs in electrical networks, even if these are under AC or DC paradigms of operation. This situation was identified as a gap in the scientific literature that this research tries to fill.
The remainder of this document is organized, as follows:
Section 2 presents the original MINLP formulation of the problem of the optimal placement and dimensioning of DGs in DC networks by highlighting its nonlinearities and non-convexities.
Section 3 presents the proposed hybrid optimization method, which is composed of a conic reformulation problem of the optimal power flow problem in DC networks and the classical GA.
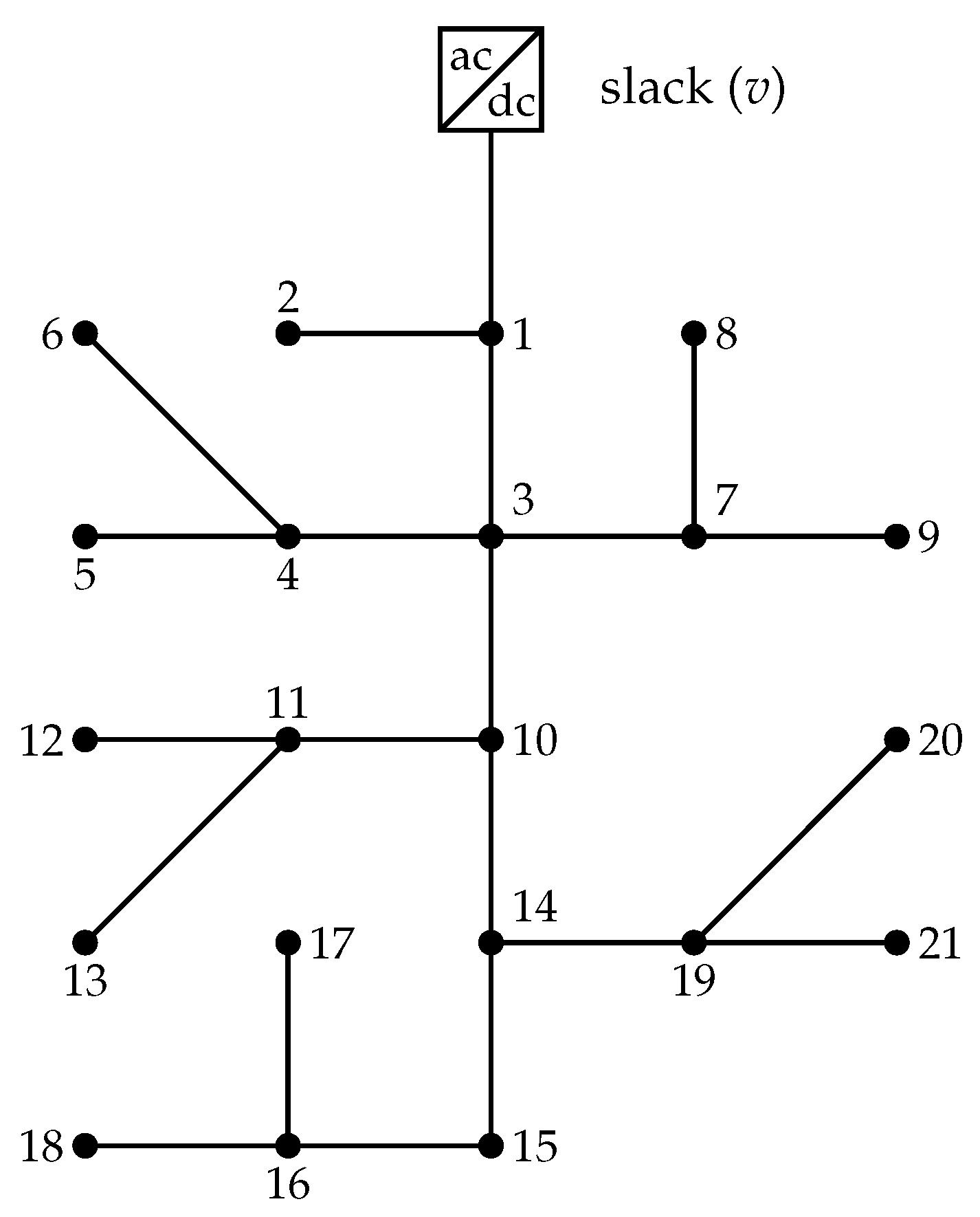
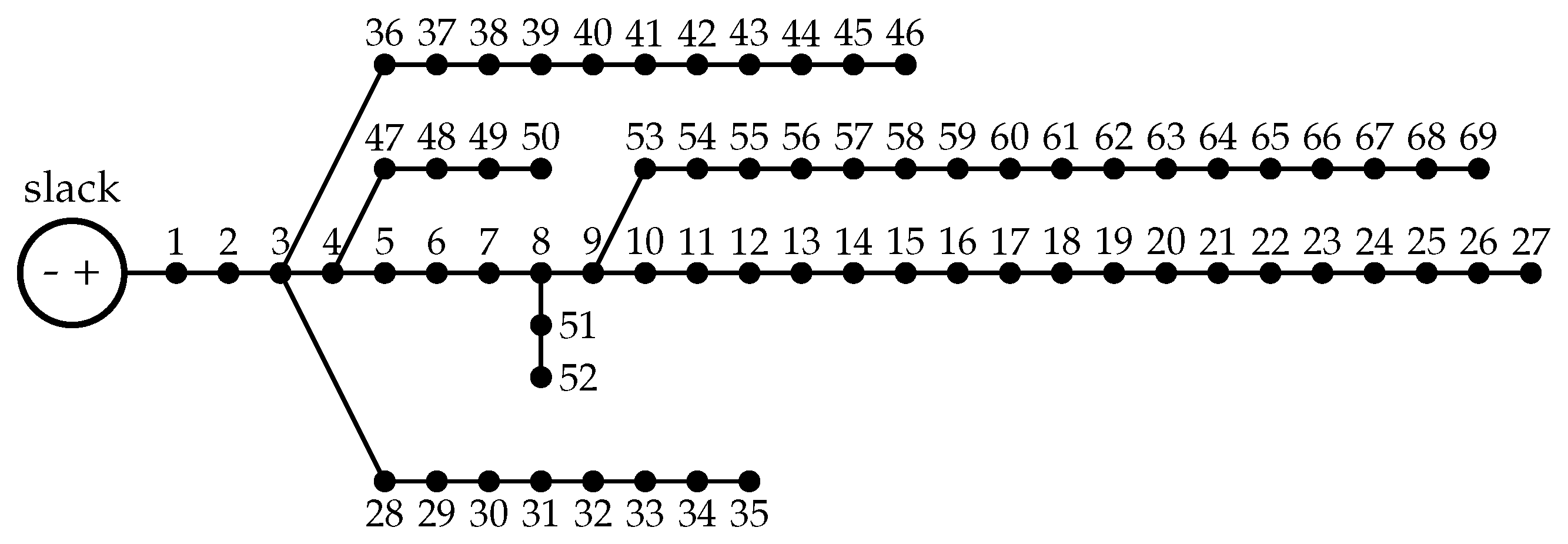
Section 4 exposes the main characteristics of the test feeders, which are composed of 21 and 69 nodes with radial structures, where the possibility of installing three DGs is considered.
Section 5 presents all of the computational validations of the proposed hybrid GA-SOCP approach and their comparisons with nonlinear solvers available in GAMS and master–slave optimization approaches that are based on genetic algorithms and particle swarm optimization methods and its variants.
Section 6 shows the concluding remarks derived from this work and some possible future researches in the area of distribution system optimization.
2. MINLP Model
The problem of the optimal placement and sizing of DGs in DC networks corresponds to an MINLP model since: (i) the problem of sizing of these power sources is modeled with binary variables, and (ii) the problem of the location of these DGs is modeled with continuous variables (power generation and voltage profiles). The optimization objective in this MINLP formulation corresponds to the minimization of the grid power losses produced by the current circulation in all the networks’ branches. The mathematical structure of this objective function is presented in Equation (
1).
where
is the value of the objective function regarding power losses in all of the branches of the network,
and
are the voltage values at nodes
i and
j, respectively, and
is the conductance value taken from the admittance nodal matrix that defines the physical interconnection among all the nodes of the DC network. Observe that
is the set that contains all of the nodes of the network.
Regarding model constraints, these are related with operational conditions of the DC distribution networks. These constraints are presented below:
where
,
, and
represent the power generation in the voltage controlled source (slack nodes), power generation in distributed sources, power consumption in demand nodes, and power flow in distribution lines, respectively.
is a parameter that defines the percentage of power penetration of renewable generation as function of the total demand;
is the binary variable associate with the location (
) or no (
) of a distributed generator at node
i;
is the maximum number of distributed generators available for location in the DC network,
and
are the minimum and maximum power generation capabilities allowed for each distributed generator connected at node
i.
and
are the lower and upper bounds for the power flow in line that connects nodes
i and
j, respectively; and,
and
are the minimum and maximum voltage bounds in all nodes of the DC distribution network, respectively.
The complete interpretation of the MINLP model defined from (
1) to (9) is as follows: Equation (
1) defines the objective function of the problem regarding the minimization of the total grid power losses in the whole DC network; Equation (
2) is the set of power balance equations applied at each node of the network; Equation (3) defines the amount of power that flows at each line of the DC grid. Expression (3) determines the maximum penetration of the distributed generation in the whole DC distribution network; Inequality constraint (4) bounds the number of generators available for location in the DC grid; inequalities (6), (7), and (8) present the upper and lower bounds for distributed generators, power flow in branches, and voltage variables, respectively. Finally, Expression (9) shows the binary nature of the decision variable regarding the location of distributed generators.
Remark 1. In the problem of the optimal placement and sizing of distributed generators in DC distribution networks is complex due to two main reasons: (i) the binary nature of the location problem makes necessary integer programming methods to define the best possible location of the distributed generators (master optimization problem); and (ii) the optimal sizing of the distributed generators for each possible location provided by the master stage is a nonlinear non-convex optimization problem due to the product between voltage variables in Expressions (1) to (3). To solve the MINLP model (
1)–(9), this research proposes a hybrid optimization approach based on genetic algorithms to address the problem of the optimal location of distributed generators and the second-order cone programming model to solve the problem of the optimal sizing of these devices. The main advantage of using SCOP instead of metaheuristics for optimal power flow analysis is that for each possible combination of distributed generator locations, the solution is the global optima [
29], which is not possible with any particle swarm derived method that corresponds to the most classical approach for solving this kind of problems in literature [
27].
5. Computational Implementation
The proposed hybrid optimization model, i.e., the GA-SOCP method, has been implemented in the MATLAB software version 2019
b on a desktop computer with an INTEL(R) Core(TM)
i7-7700 2.8-GHz processor and 16.0 GB of RAM running on a 64-bit version of Microsoft Windows 10 Home. To validate our proposed MI-SOCP formulation solved with the proposed hybrid GA-SOCP approach, we employed different MINLP solvers that were available in the GAMS software (i.e., SBB and CONOPT solvers), and some metaheuristic approaches reported in [
37]. In [
37], the genetic algorithm has been combined with three continuous methods, as follows: black-hole optimizer (GA-BHO), particle swarm optimization (GA-PSO), and continuous genetic algorithm (GA-CGA). In addition, the following simulating conditions are considered:
- 🗸
Three distributed generators are available for installation in the DC test feeder; wherein, the case of the 21-node test system, their maximum individual allowed size is 1.5 pu and, in the case of the 69-node test feeder, this bound is 12 pu.
- 🗸
The maximum power penetration in the 21-node test feeder is and, in the case of the 69-node test feeder, the maximum penetration is regarding the total power demand of each one of the DC networks.
Remark 6. All the genetic algorithms employed as the master stage in the proposed and comparison methods have adjusted using a trial and error procedure, which have been produced as parameters: 10 individuals in the population, 100 iterations, recombination, and mutation rates 50%. In addition, to evaluate statistically speaking these methods, 100 consecutive iterations were made for each method.
5.1. 21-Node Test Feeder
Table 3 reports the numerical comparisons between the proposed hybrid optimization method and the literature approaches for the 21-node test feeder. Note that this problem’s optimal solution corresponds to nodes 9, 12, and 16, with power injections of 0.8350 pu, 1.0258 pu, and 1.4632 pu, respectively.
- 🗸
All of the comparison methods, as well as the proposed approach, identifies the best optimal location in nodes 9, 12, and 16. However, due to the aleatory nature of the continuous metaheuristics (i.e., BHO, PSO, and CGA), both of them are stuck local optimums, and only the GA-PSO approach can deal with the global optimal solution.
- 🗸
The mixed-integer quadratic programming (MIQP) model and the SBB solver (for the exact MINLP model) reach the global optimal solution with the lowest computational effort, which is attributable to the efficiency of the GAMS interface.
- 🗸
The standard deviation of the proposed GA-SOCP programming is the lowest when compared with metaheuristics; this situation occurs because the proposed approach works with an exact optimization method based on second-order cone programming that has a unique solution for each combination of DGs provided by the GA in the master stage.
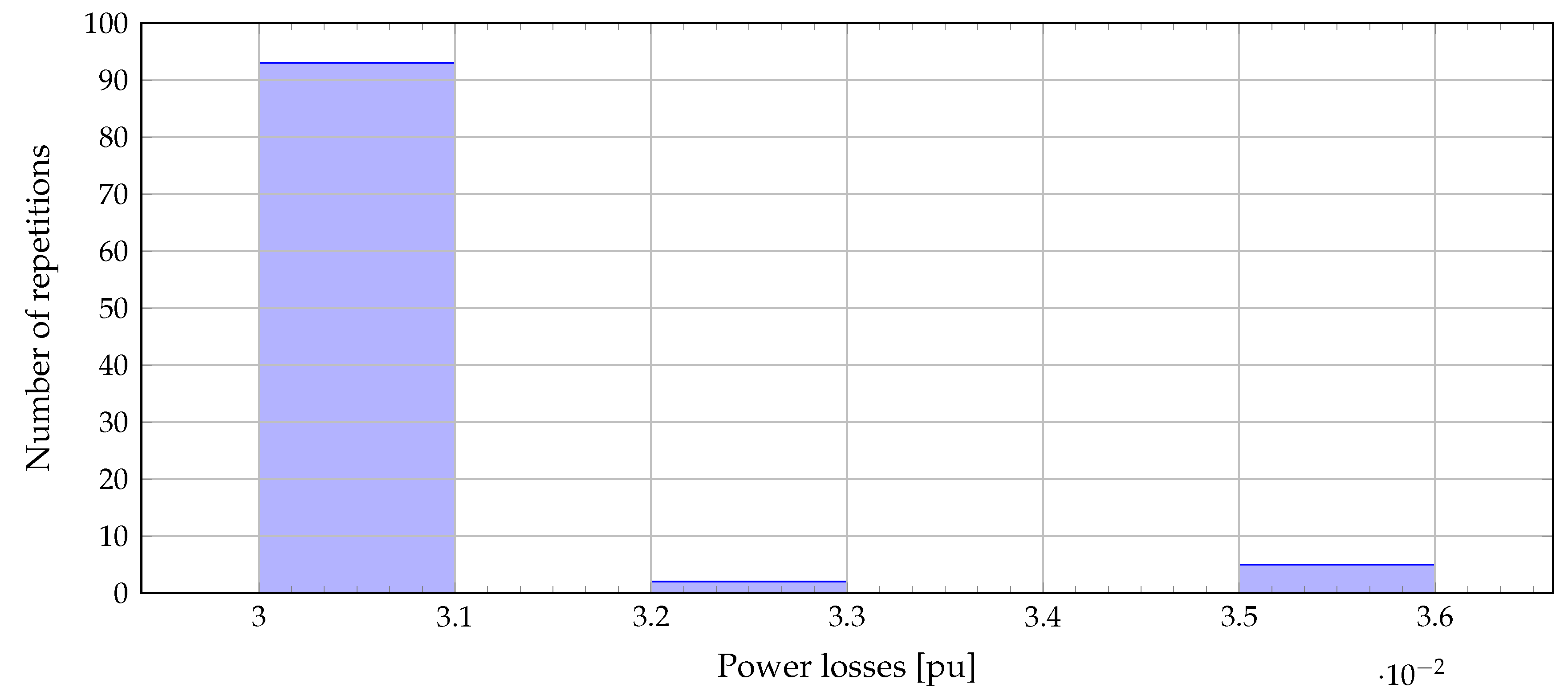
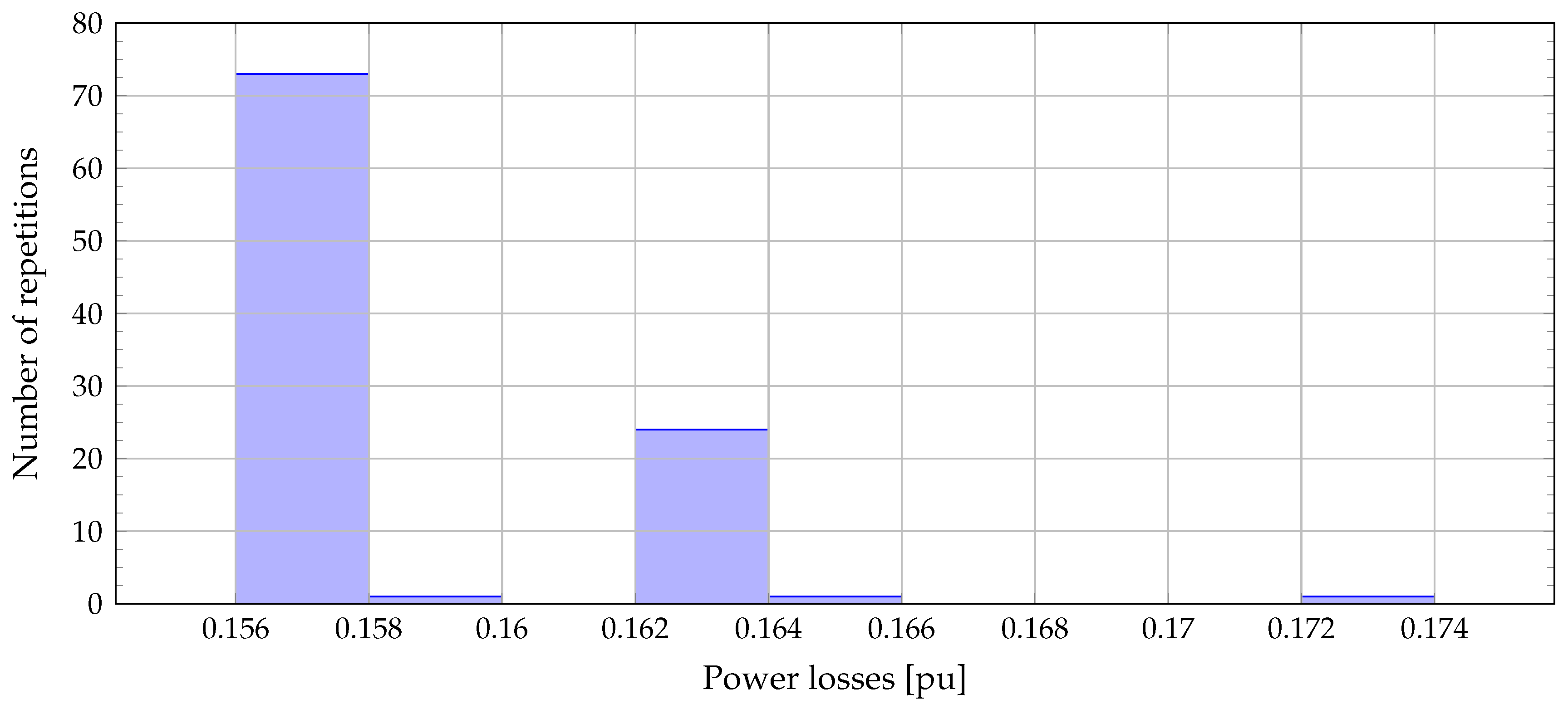
Figure 3 presents the histogram after the 100 consecutive evaluations of the proposed methodology for optimal placement and sizing distributed generators in DC distribution networks in order to present the efficiency of the proposed GA-SOCP approach.
Note that the histogram presented in
Figure 3 shows that more than 90 solutions (93 exactly) reached by the proposed hybrid GA-SOCP method has the capability of finding the global optimal solution (i.e., 0.0306 pu) regarding power losses, which confirms the efficiency and robustness of the studied methodology for optimal placement and sizing DGs in DC distribution networks.
Remark 7. We can ensure that the solution finds by the proposed GA-SOCP approach is the optimal one, since all the possibilities (i.e., 1140 options) for the location of DGs in the 21-node test feeder have been evaluated comprehensively via nested loops, which have confirmed that nodes 9, 12 and 16 are the best possible location for these DGs reaching a final power losses of pu. It is worth mentioning that this exhaustive evaluation takes about s.
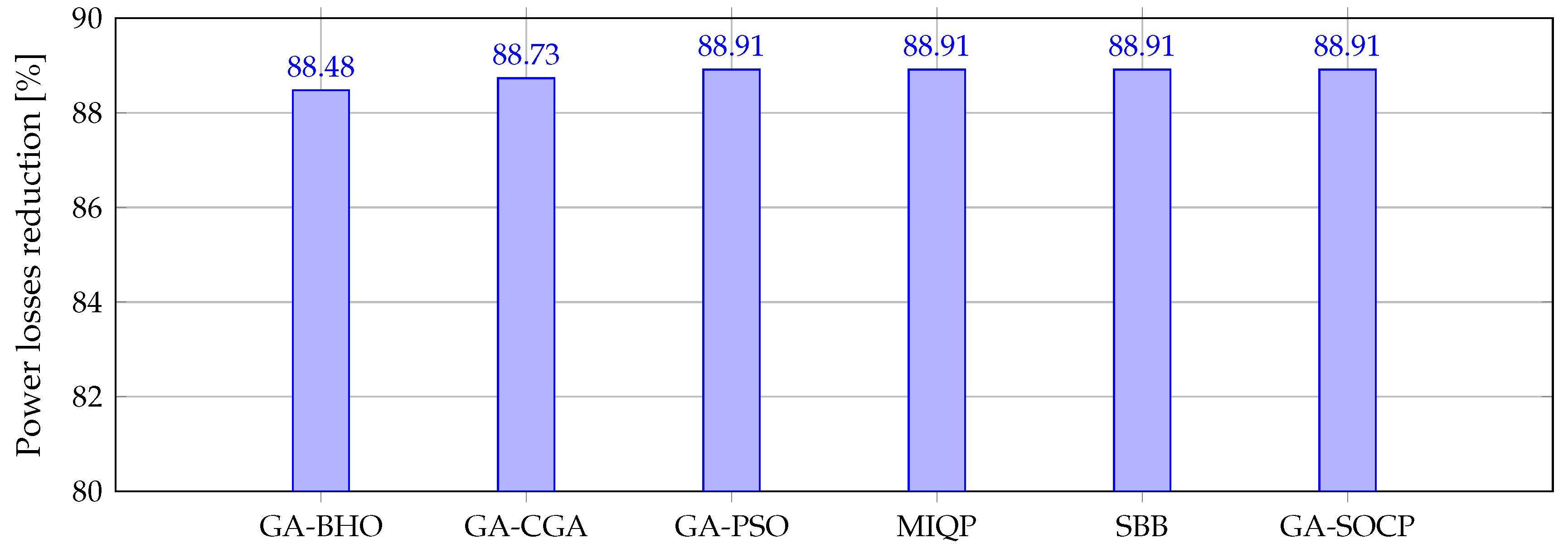
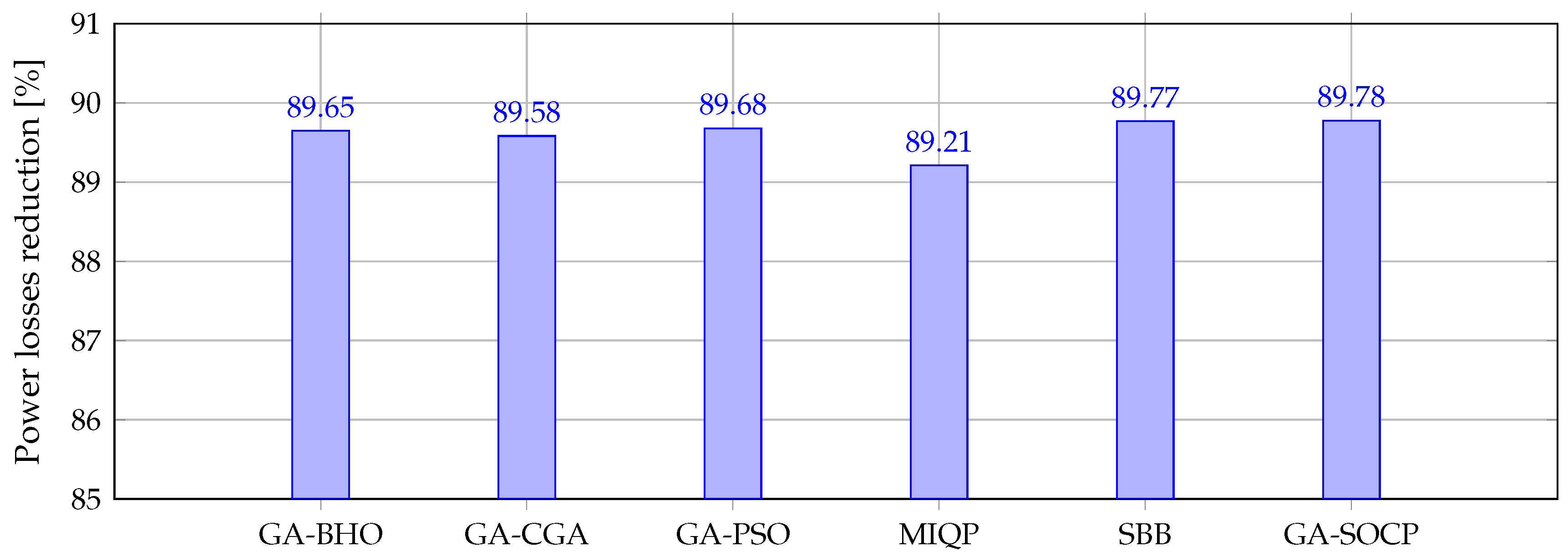
Figure 4, which presents the percentage of improvement reached by the comparative methods in contrast to the proposed hybrid optimization approach, shows the total grid improvement about the power losses minimization.
Figure 4 shows the positive impact that has the inclusion of distributed generation in DC distribution networks, since all of the comparative methods and the proposed hybrid approach present improvements that are higher than
with a total penetration of 60% in a distributed generation regarding total power consumption. In addition, these results confirm the global capabilities of the proposed hybrid GA-SOCP method for dealing with the problem of the optimal location and sizing DGs in DC feeders.
5.2. 69-Node Test Feeder
Table 4 presents the numerical results of the proposed and comparative methods. These results allow observing that:
- 🗸
All of the comparative methods are stuck in locally optimal solutions, including the MIQP approach and the MINLP model solved in GAMS through the SBB solver since these finds final power losses about pu and pu, respectively. However, the best optimal solution is reached by the GA-SOCP method with pu.
- 🗸
Some of the metaheuristic approaches (i.e., GA-CGA and GA-PSO) find the best positions for installing the GDs being these nodes 21, 61, and 64; nevertheless, due to the random procedures in the slave stages, these find local solutions.
- 🗸
Even if standard deviations of the GA-PSO and GA-CGA are lower than the proposed GA-SOCP, these values imply that these methods are always trapped in the local solutions, and they do not have the capacity of scape from these solutions to explore other promissory regions of the solution space.
Note that the best optimal solution reported by the GA-SOCP proposed approach connects DGs in nodes 21, 61, and 64 with generation capabilities of about pu, pu, and , respectively. Once again, we can confirm that this solution is the global optimum, since, after the exhaustive evaluation of the solution space (i.e., 50116 possible locations) via nested loops, the same set of nodes and power generations have been identified as the best global solution. It is important to highlight that this exhaustive evaluation takes about 7000 s to revise the whole solution space, which implies that s reported by the proposed GA-SOCP approach demonstrates its efficiency and robustness global finding capabilities.
Figure 5 presents the histogram with the optimization behavior of the proposed GA-SOCP method for locating and sizing DGs in DC distribution networks.
From
Figure 5, it can be noted that more than
of the solutions that were found by the proposed GA-SOCP method find the global optimal solution, and
of the additional solutions are better than the mean solutions reported in
Table 4 (see
column). These results confirm the proposed GA-SOCP optimization approach’s efficiency and robustness for solving the optimal placement and sizing of DGs in DC distribution networks with global optimum finding capabilities.
Figure 6 presents the percentage of power losses improvement reached by the comparative and the proposed optimization approaches.
Note that the percentage of reduction of power losses reported in plot
Figure 6 confirms the global optimization capabilities of the proposed GA-SOCP approach, since it is the only one methodology that reports the highest percentage of reduction with
, only followed by the SBB methodology with
of reduction.
5.3. General Commentaries
After applying the comparative and the proposed optimization methodology for optimal locating and sizing DGs in DC distribution networks, we can affirm that:
- 🗸
The processing times in both test systems have been lower than 70 s, which implies that for planning purposes, our approach is perfectly applicable since, with a fraction of the time taken by the exhaustive search method, this can deal with the global optimal solution. In addition, the processing times of the comparative metaheuristic methods increase rapidly as a function of the test feeder size (see the last columns of
Table 3 and
Table 4) with the main disadvantage that due to the random behavior of the slave stages, i.e., BHO, CGA, and PSO, it is not possible to find the optimal solution of the studied optimization problem.
- 🗸
The methodologies implemented in GAMS, i.e., the MIQP and the MINLP model, both solved with the SBB tool available in GAMS, have speedy processing times. However, the linearization of the power flow equations in the MIQP approach and the nonlinear and non-convex structure of the exact MINLP model make that these get stuck in optimal locations as the solution space grows.
- 🗸
The main advantages of the proposed hybrid GA-SOCP master-slave optimization method are: (i) the possibility of using a compact codification with integer numbers (nodes) that allows for guaranteeing feasibility in all the stages of the genetic algorithm procedures, and (ii) the guarantee of the global optimal solution for each combination of distributed generators thanks to the second-order cone structure of the optimal power flow problem in the slave stage.
6. Conclusions and Future Works
A hybrid master-slave optimization approach for optimal placement and sizing distributed generators in DC distribution networks while using a combination of the classical Chu & Beasley genetic algorithm in the master stage and a second-order cone programming model in the slave stage, i.e., GA-SOCP. This algorithm has an important advantage regarding classical metaheuristics, since solving the optimal power flow problem for optimal dimensioning the distributed generators provided by the master stage with a SCOP model guarantees the existence and uniqueness of the optimal solution, which is not possible with combination methods, such as BHO, CGA, and PSO, where random procedures affect the optimization process. Numerical comparisons with classical metaheuristics and exact methodologies demonstrate that, for the studied test feeders, the proposed GA-SOCP approach deals with the global optimal solution. Simultaneously, it is not the case of the comparative methods in the 69-node test feeder scenario. The effectiveness of the proposed GA-SOCP method to find the optimal solution after 100 consecutive evaluations is about for the 21-node test feeder, and in the case of the 69-node test system, which implies the high efficiency of the studied hybrid optimization approach to deal with MINLP problems.
Regarding future works, it will be possible to make the following researches: (i) extend the proposed optimization methodology to the optimal location and sizing of distributed generators and capacitor banks in AC distribution networks, (ii) to apply the proposed GA-SOCP approach to the problem of the optimal placement and sizing battery energy storage systems in AC and DC networks, and (iii) to develop an economic dispatch approach to optimal locating renewable generation at isolated distribution networks when considering variations in the load curve and the primary energy resources.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}