
Methods for Noise Event Detection and Assessment of the Sonic Environment by the Harmonica Index





Abstract
:1. Introduction
2. Materials and Methods
2.1. Noise Monitoring Sites and Data Set
2.1.1. Andorra la Vella, Principality of Andorra
- Site “Aa” (Figure 1a), connecting the three main roads of Andorra’s capital, showing the heaviest and loudest road traffic during rush hour time, especially on weekdays; it is the main noise source, with rather constant, high sound levels, and low variations over time, compared to the other areas during the rush hours.
- Site “Ab” (Figure 1b), being the intersection between the main road from the capital to the north valley and a wide pedestrian and commercial area. This is one of the most common promenade points for residents and tourists. In this area, the noise sources are “wider” than site (a) throughout the day; it recently became the largest pedestrian area in the country.
- Site “Ac” (Figure 1c), the crossing of a main road and the final part of a pedestrian and commercial street, similar to site (b), but not totally pedestrianized, since it depends on traffic lights for people to cross the road. Thus, a high variability of noise sources during the day was observed, as in site (b), but with the additional—and presumably not usual—street works occurring during the noise monitoring days.
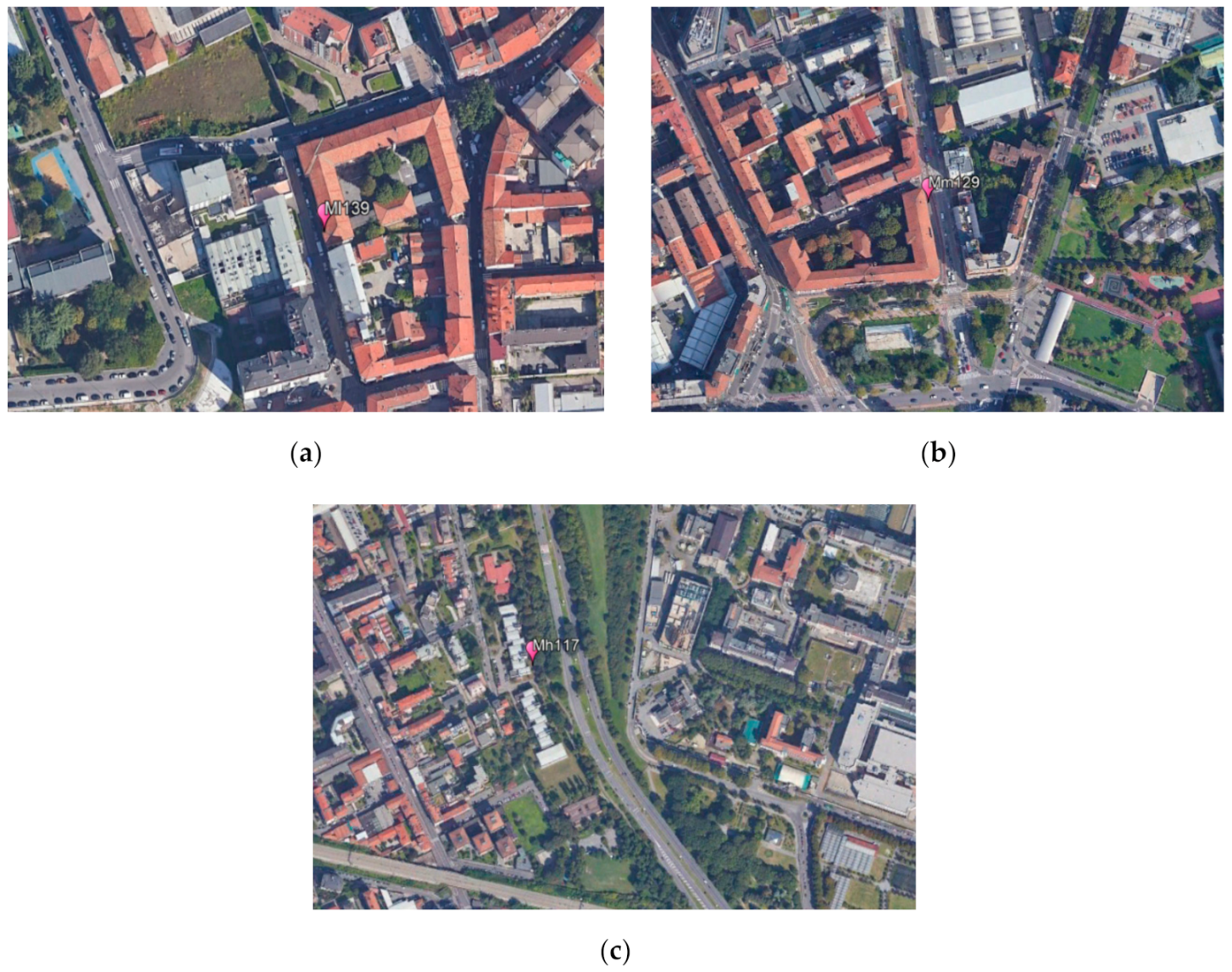
2.1.2. Milan, Italy
2.2. Data Processing
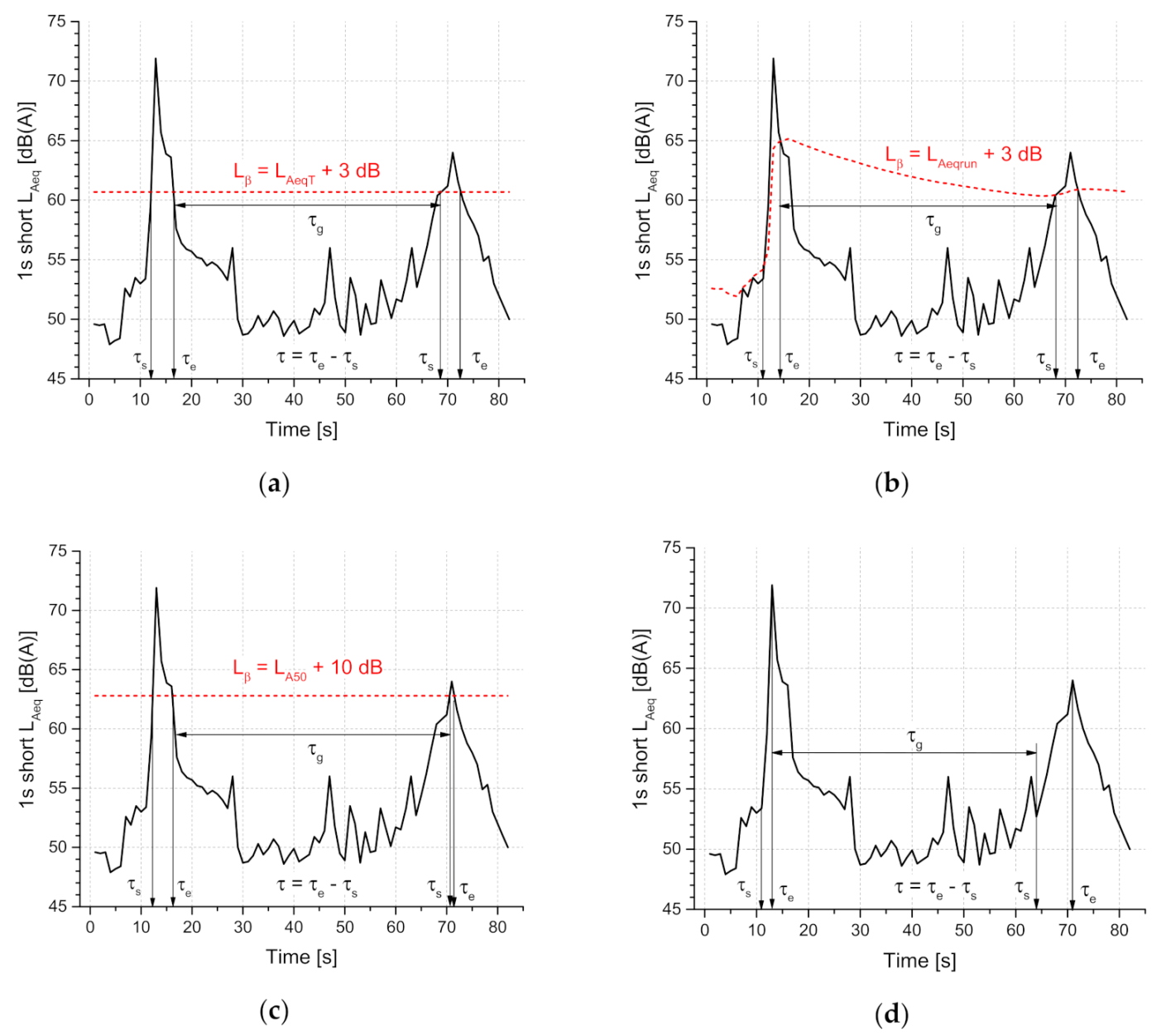
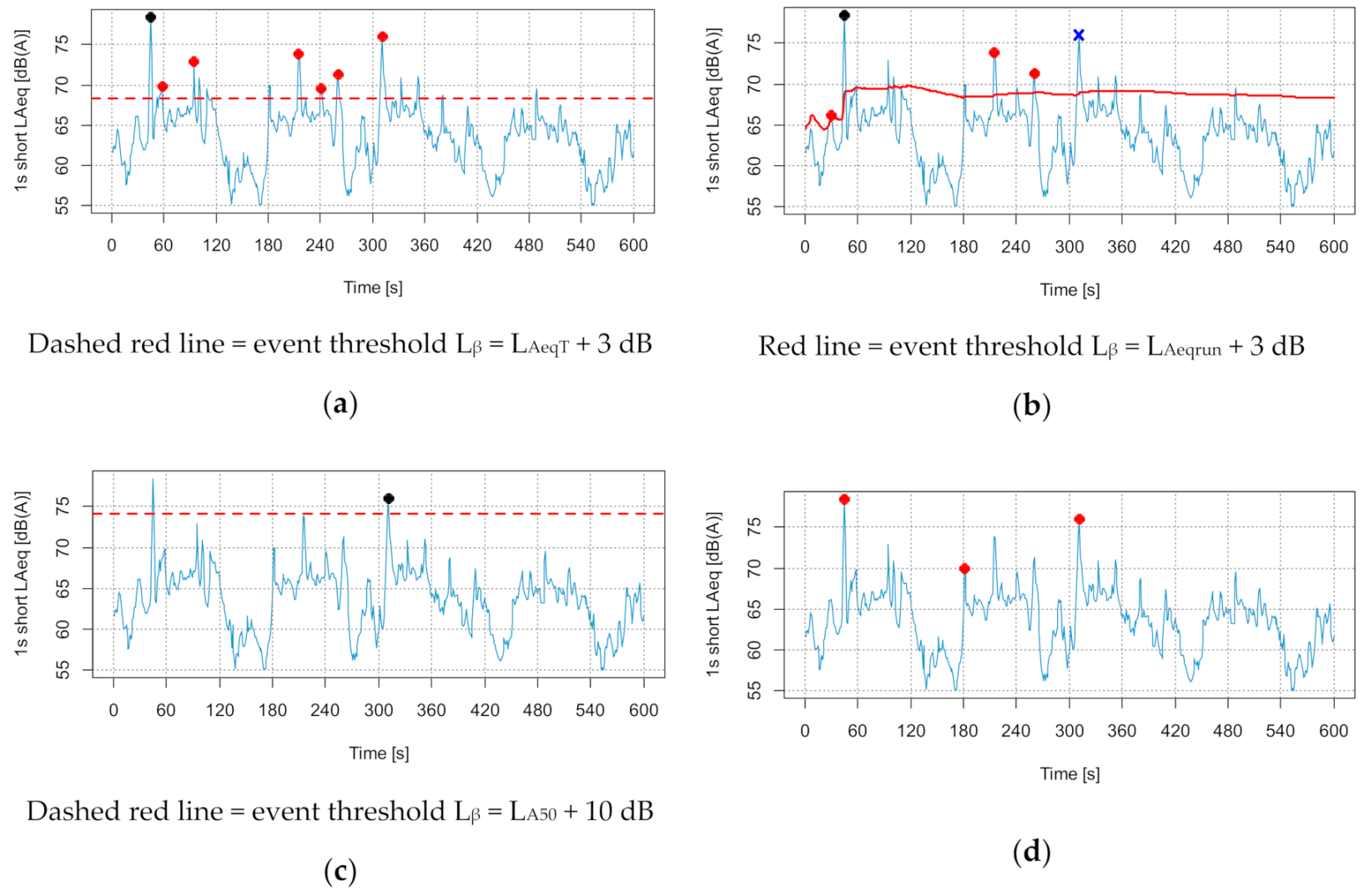
2.2.1. Detection of Noise Events
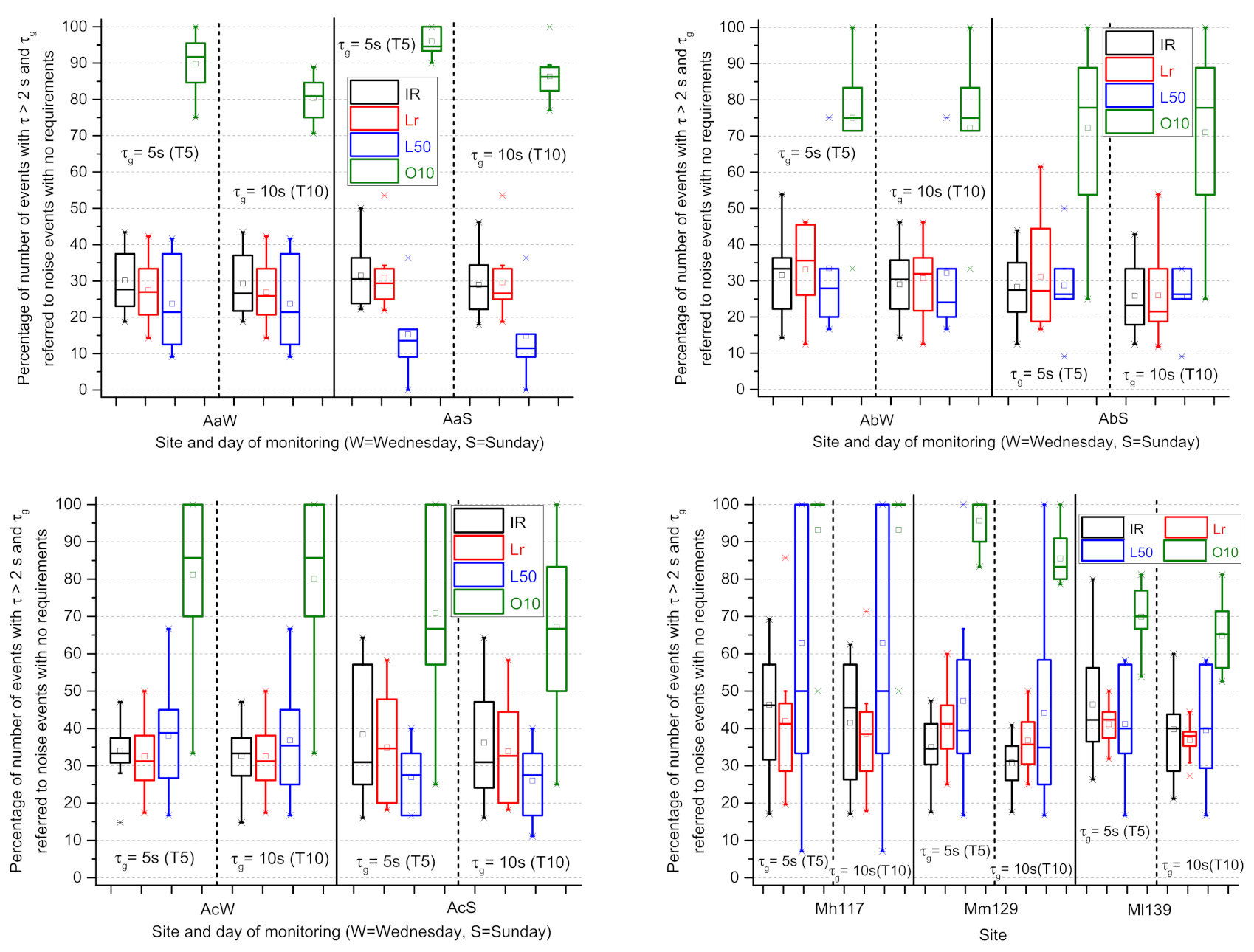
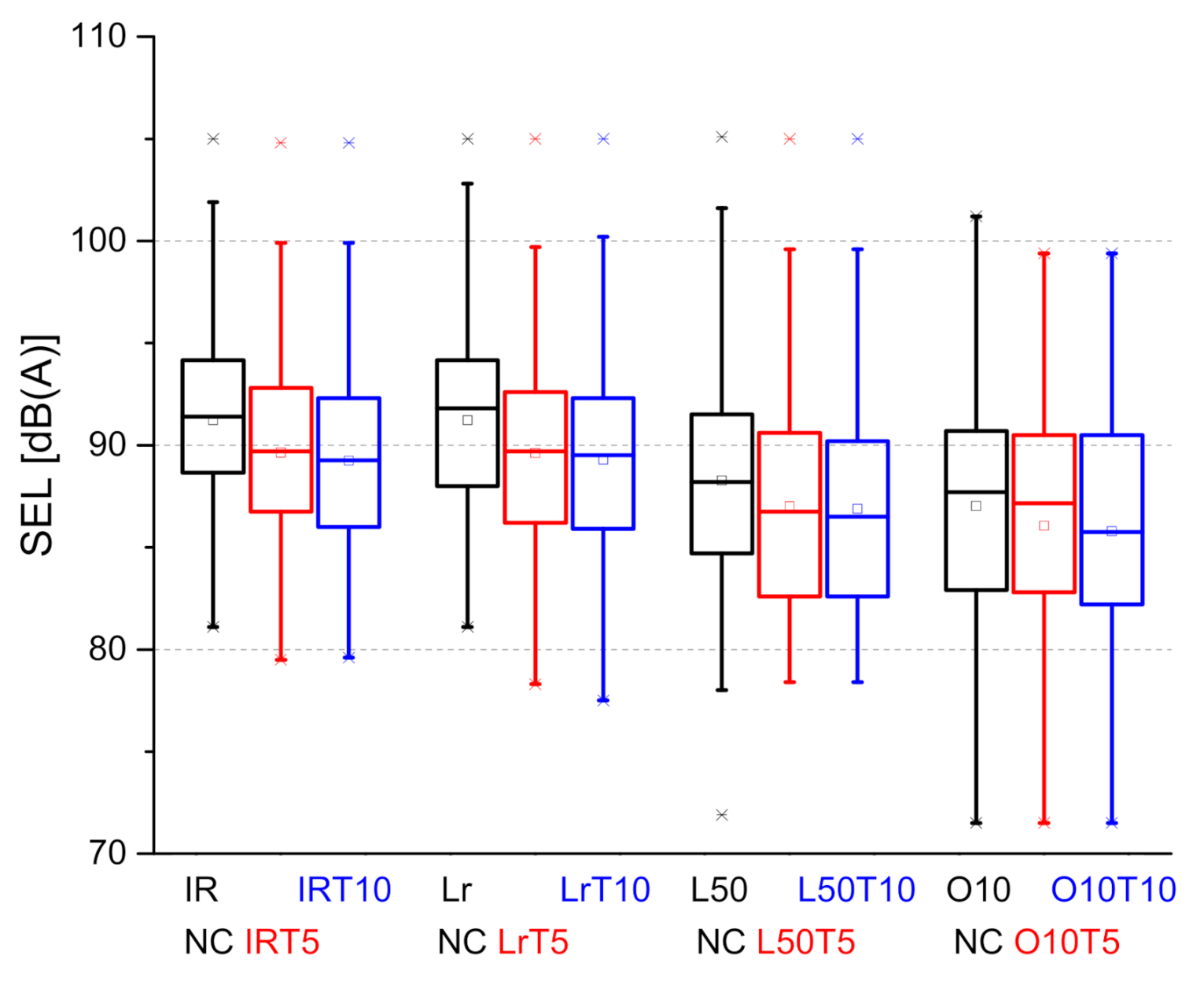
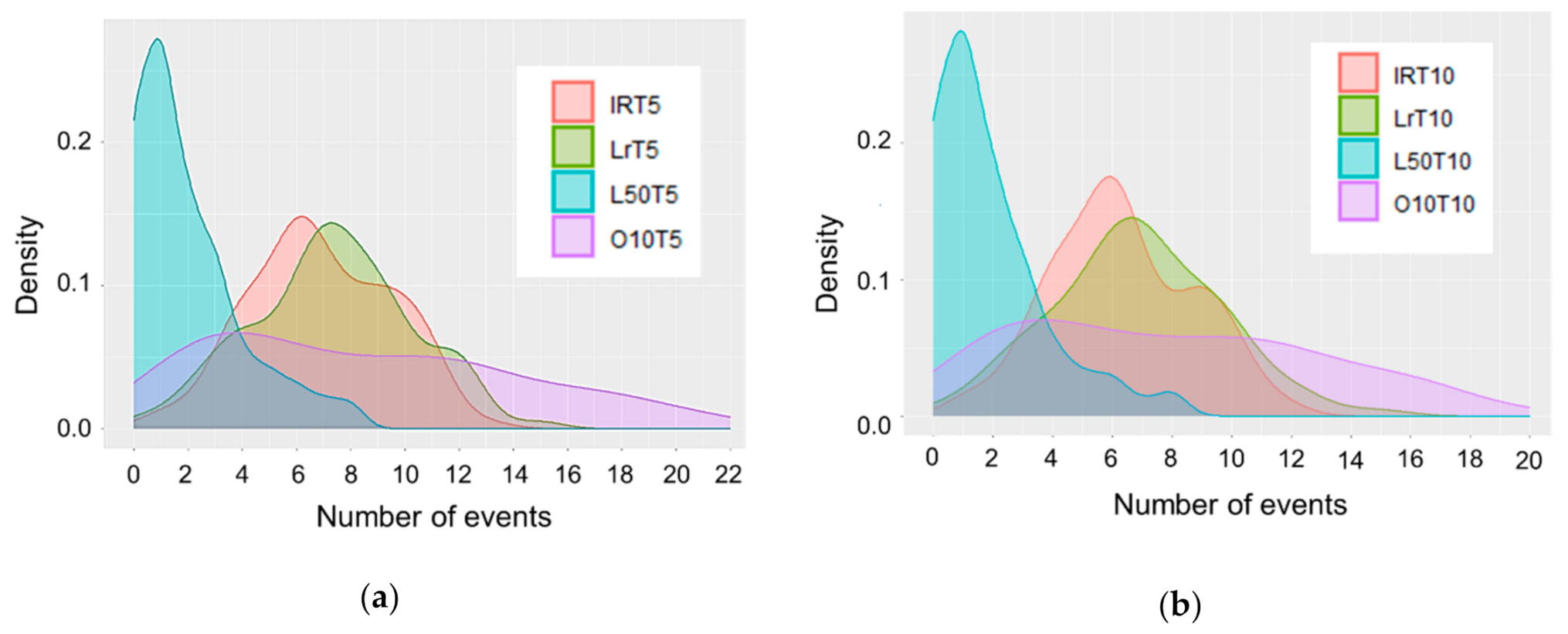
- Noise levels exceeding the threshold Lβ = LAeqT + C dB, according to the formulation of the intermittency ratio (IR) [17], where LAeqT is the continuous equivalent level referred to the measurement time T and 3 dB is the value chosen for the constant term C [17] (Figure 3a). This algorithm is denoted as “IR” hereinafter.
- Noise levels exceeding the threshold Lβ = LAeq,run + 3 dB, where LAeq,run is the running LAeq (Figure 3b). This algorithm is denoted as “Lr” hereinafter.
- SPL onset, as sum of progressive positive SPL increments, greater than 10 dB from the event start time τs (Figure 3d). This algorithm is denoted as “O10” hereinafter.
- Without any condition on the event duration τ and time gap τg (or noise free interval) between adjacent events, hereinafter denoted as NC.
- Event duration τ > 2 s and time gap τg equal to 5 (T5) and 10 (T10) s, hereinafter denoted as C.
- Unique source labels, assigned source corresponding to that indicated by all the labels when they were always the same (either road traffic noise (RTN), or something else, i.e., anomalous noise event (ANE).
- Mixed source labels, assigned source corresponding to that indicated by the majority of the labels when they differed.
- Equal number of RTN and ANE labels, no source assignment.
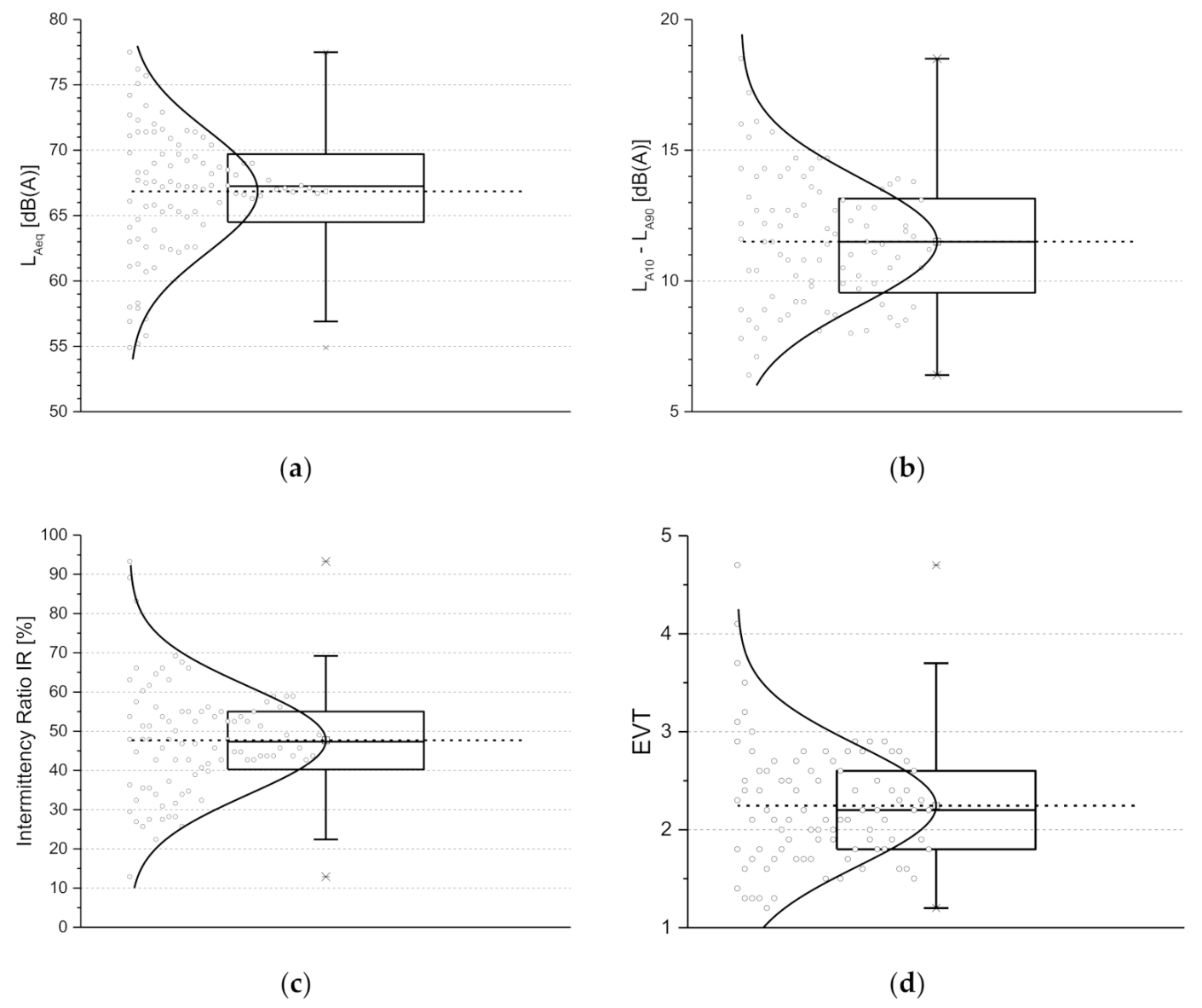
- The continuous equivalent level LAeq,T in dB(A), referred to measurement time T of 10 min.
- The running equivalent level LAeq,run in dB(A).
- The standard deviation (sdLA) and the kurtosis (kLA) of the 1 s short LAeq levels during the measurement time T to describe the level distribution.
- The noise climate, as difference between the percentiles levels LA10 and LA90 in dB(A) along the measurement time T.
- The intermittency ratio (IR) in %, calculated according to [17].
- The event-related component EVT of the Harmonica index [24], representing the acoustic energy provided by noise peaks that emerged above the background noise, and calculated as follows:
- The total number of noise events detected by the four algorithms with (C) and without (NC) conditions on event duration and time gap.
- Start time τs, duration τ, SEL and LAeq levels of each detected noise event.
- Number of detected noise events.
- Number of noise events due to mixed sources as recognized by the ANED procedure [19].
- Number of noise events due to road traffic noise recognized as unique labels or majority of mixed labels as provided by the ANED procedure [19].
- Number of noise events with an equal number of RTN and ANE labels.
- Plot of 1 s short LAeq levels versus time, with indication of the detected noise events and the recognized source for each algorithm.
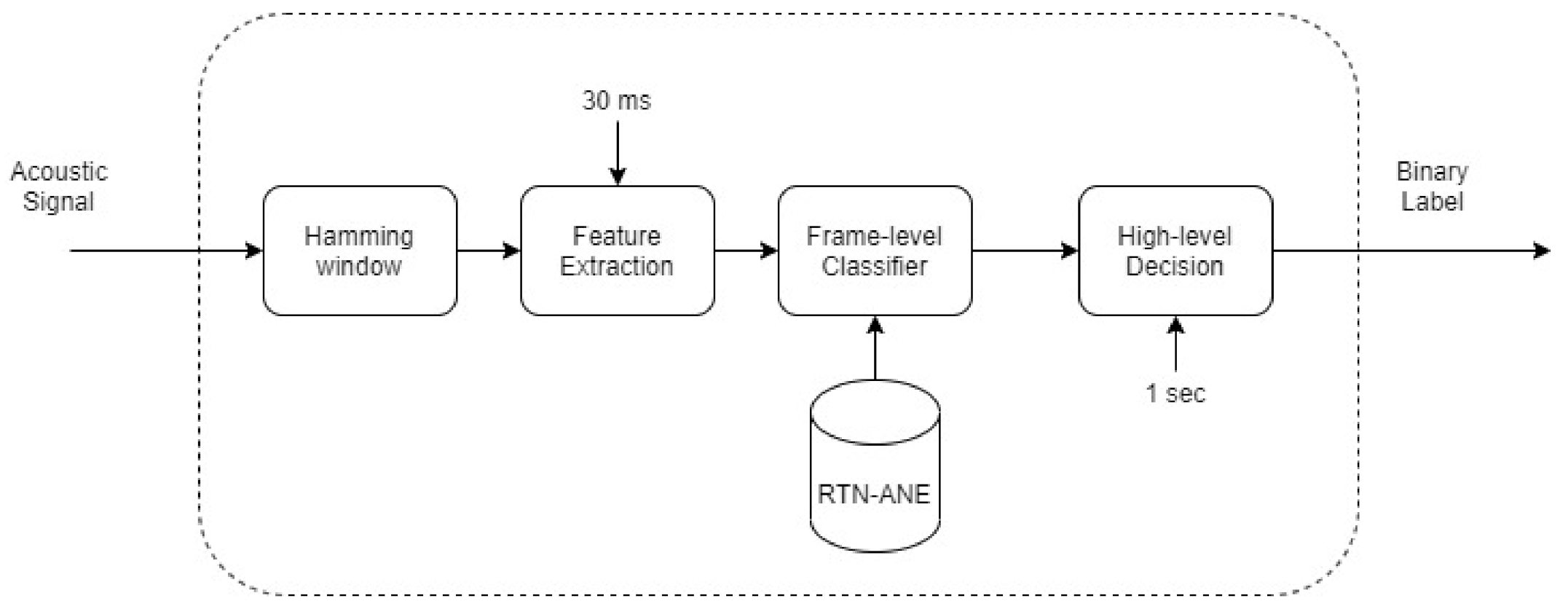
2.2.2. Recognition of the Noise Event Source
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Acronyms
| ANE | anomalous noise event |
| ANED | anomalous noise event detector |
| BGN | background component of the Harmonica index |
| DYNAMAP | dynamic acoustic mapping |
| END | European noise directive 2002/49/EC |
| EVT | event component of the Harmonica index |
| GMM | Gaussian mixture models |
| IR | intermittency ratio |
| MAD | median absolute deviation |
| MFCC | Mel-frequency cepstral coefficient |
| RTN | road traffic noise |
| SEL | single event level |
| SPL | sound pressure level |
References
- European Environment Agency. Good Practice Guide on Noise Exposure and Potential Health Effects; EEA Technical Report 11/2010; EEA: Copenhagen, Denmark, 2010. [Google Scholar]
- Stansfeld, S.A.; Matheson, M.P. Noise pollution: Non-auditory effects on health. Br. Med. Bull. 2003, 68, 243–257. [Google Scholar] [CrossRef] [PubMed]
- Fritschi, L.; Brown, A.L.; Kim, R.; Schwela, D.H.; Kephalopoulos, S. Burden of Disease from Environmental Noise. Quantification of Healthy Life Years Lost in Europe; World Health Organization Regional Office for Europe, JRC European Commission: Copenhagen, Denmark, 2011. [Google Scholar]
- Directive 2002/49/EC of the European Parliament and of the Council of 25 June 2002 relating to the assessment and management of environmental noise. Off. J. Eur. Communities 2002, 189, 12.
- Kephalopoulos, S.; Paviotti, M.; Anfosso-Lédée, F. Common Noise Assessment Methods in Europe (CNOSSOS-EU); Publications Office of the European Union: Luxembourg, 2012. [Google Scholar]
- Bertrand, A. Applications and trends in wireless acoustic sensor networks: A signal processing perspective. In Proceedings of the 18th IEEE Symposium on Communications and Vehicular Technology in the Benelux (SCVT), Ghent, Belgium, 22–23 November 2011; pp. 1–6. [Google Scholar]
- Alsina Pagès, R.M.; Alias, F.; Bellucci, P.; Cartolano, P.; Coppa, I.; Peruzzi, L.; Bisceglie, A.; Zambon, G. Noise at the time of COVID 19: The impact in some areas in Rome and Milan, Italy. Noise Mapp. 2020, 7, 248–264. [Google Scholar] [CrossRef]
- Bockstael, A.; De Coensel, B.; Lercher, P.; Botteldooren, D. Influence of temporal structure of the sonic environment on annoyance. In Proceedings of the 10th International Congress on Noise as a Public Health Problem (ICBEN), London, UK, 24–28 July 2011; pp. 945–952. [Google Scholar]
- De Coensel, B.; Botteldooren, D.; De Muer, T.; Berglund, B.; Nilsson, M.E.; Lercher, P. A model for the perception of environmental sound based on notice-events. J. Acoust. Soc. Am. 2009, 126, 656–665. [Google Scholar] [CrossRef] [PubMed]
- Lercher, P. Environmental noise and Analysis of an Annotated health: An integrated research perspective. Environ. Int. 1996, 22, 117–129. [Google Scholar] [CrossRef]
- Vidaña-Vila, E.; Duboc, L.; Alsina-Pagès, R.M.; Polls, F.; Vargas, H. BCNDataset: Description and night urban leisure sound dataset. Sustainability 2020, 12, 8140. [Google Scholar] [CrossRef]
- Brambilla, G.; Confalonieri, C.; Benocci, R. Application of the intermittency ratio metric for the classification of urban sites based on road traffic noise events. Sensors 2019, 19, 5136. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brambilla, G.; Benocci, R.; Confalonieri, C.; Roman, H.E.; Zambon, G. Classification of urban road traffic noise based on sound energy and eventfulness indicators. Appl. Sci. 2020, 10, 2451. [Google Scholar] [CrossRef] [Green Version]
- Brown, A.L.; Banerjee, D.; Tomerini, D. Noise events in road traffic and sleep disturbance studies. In Proceedings of the Internoise 2012, New York, NY, USA, 19–22 August 2012. [Google Scholar]
- Brown, A.L.; De Coensel, B. A study of the performance of a generalized exceedance algorithm for detecting noise events caused by road traffic. Appl. Acoust. 2018, 138, 101–114. [Google Scholar] [CrossRef] [Green Version]
- De Coensel, B.; Brown, A.L. Event-based Indicators for road traffic noise exposure assessment. In Proceedings of the Euronoise 2018, Crete, Greece, 27–31 May 2018; pp. 485–490. [Google Scholar]
- Wunderli, J.M.; Pieren, R.; Habermacher, M.; Vienneau, D.; Cajochen, C.; Probst-Hensch, N.; Röösli, M.; Brink, M. Intermittency ratio: A metric reflecting short-term temporal variations of transportation noise exposure. J. Expo. Sci. Environ. Epidemiol. 2016, 26, 575–585. [Google Scholar] [CrossRef] [PubMed]
- Orga, F.; Alías, F.; Alsina-Pagès, R.M. On the impact of anomalous noise events on road traffic noise mapping in urban and suburban environments. Int. J. Environ. Res. Public Health 2018, 15, 13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Socoró, J.C.; Ribera, G.; Sevillano, X.; Alías, F. Development of an anomalous noise event detection algorithm for dynamic road traffic noise mapping. In Proceedings of the ICSV 2015, Florence, Italy, 12–16 July 2015. [Google Scholar]
- Bellucci, P.; Peruzzi, L.; Zambon, G. LIFE DYNAMAP: Making dynamic noise maps a reality. In Proceedings of the Euronoise 2018, Crete, Greece, 27–31 May 2018; pp. 1181–1188. [Google Scholar]
- Alsina-Pagès, R.M.; Almazán, R.G.; Vilella, M.; Pons, M. Noise events monitoring for urban and mobility planning in Andorra la Vella and Escaldes-Engordany. Environments 2019, 6, 24. [Google Scholar] [CrossRef] [Green Version]
- Benocci, R.; Confalonieri, C.; Roman, H.E.; Angelini, F.; Zambon, G. Accuracy of the dynamic acoustic map in a large city generated by fixed monitoring units. Sensors 2020, 20, 412. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brink, M.; Schäffer, B.; Vienneau, D.; Foraster, M.; Pieren, R.; Eze, I.C.; Cajochen, C.; Probst-Hensch, N.; Röösli, M.; Wunderli, J.-M. A survey on exposure-response relationships for road, rail, and aircraft noise annoyance: Differences between continuous and intermittent noise. Environ. Int. 2019, 125, 277–290. [Google Scholar] [CrossRef] [PubMed]
- Mietlicki, C.; Mietlicki, F.; Ribeiro, C.; Gaudibert, P.; Vincent, B. The HARMONICA project, new tools to assess environmental noise and better inform the public. In Proceedings of the Forum Acusticum 2014, Kraków, Poland, 7–12 September 2014. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2018; Available online: https://www.R-project.org/ (accessed on 28 August 2021).
- Lercher, P.; Boeckstael, A.; De Coensel, B.; Dekoninck, L.; Botteldooren, D. The application of a notice-event model to improve classical exposure-annoyance estimation. In Proceedings of the Acoustics 2012, Hong Kong, China, 13–18 May 2012. [Google Scholar]
- Decree of the Italian Ministry of Environment, D.M. Ambiente 16/3/1998 Tecniche di rilevamento e di misurazione dell’inquinamento acustico (Measurement techniques of noise pollution). Gazz. Uff. 1998, 76, 15–19. (In Italian) [Google Scholar]
- Sevillano, X.; Socoró, J.C.; Alías, F.; Bellucci, P.; Peruzzi, L.; Radaelli, S.; Coppi, P.; Nencini, L.; Cerniglia, A.; Bisceglie, A.; et al. DYNAMAP—Development of low cost sensors networks for real time noise mapping. Noise Mapp. 2016, 3, 172–189. [Google Scholar] [CrossRef]
- Socoró, J.C.; Alías, F.; Alsina-Pagès, R.M. An anomalous noise events detector for dynamic road traffic noise mapping in real-life urban and suburban environments. Sensors 2017, 17, 2323. [Google Scholar] [CrossRef] [PubMed]
- Mermelstein, P. Distance measures for speech recognition, psychological and instrumental. Pattern Recognit. Artif. Intell. 1976, 116, 374–388. [Google Scholar]
- Alías, F.; Socoró, J.C.; Alsina-Pagès, R.M. WASN-based day–night characterization of urban anomalous noise events in narrow and wide streets. Sensors 2020, 20, 4760. [Google Scholar] [CrossRef] [PubMed]
- Orga, F.; Socoró, J.C.; Alías, F.; Alsina-Pagès, R.M.; Zambon, G.; Benocci, R.; Bisceglie, A. Anomalous noise events considerations for the computation of road traffic noise levels: The DYNAMAP’s Milan case study. In Proceedings of the 24th International Congress on Sound and Vibration, ICSV 2017, London, UK, 23–27 July 2017. [Google Scholar]
- Alsina-Pagès, R.M.; Alías, F.; Socoró, J.C.; Orga, F. Development and validation of an anomalous noise events detector focused on salient events through an urban and suburban WASN adapted to real-operation. In Proceedings of the ICSV27, online, 11–16 July 2021. [Google Scholar]
- Lê, S.; Josse, J.; Husson, F. FactoMineR: An R Package for Multivariate Analysis. J. Stat. Softw. 2008, 25, 1–18. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IRT5 | IRT10 | LrT5 | LrT10 | L50T5 | L50T10 | O10T5 | O10T10 | |
|---|---|---|---|---|---|---|---|---|
| Median | −1.2 | −1.6 | −1.3 | −1.6 | −1.5 | −1.4 | −0.4 | −0.9 |
| MAD | 0.4 | 0.7 | 0.6 | 0.8 | 1.4 | 1.4 | 0.4 | 0.9 |
| pvalue | ||||||||
| Not conditioned events (NC) vs. Conditioned (C) | 0.016 | 0.037 | 0.020 | 0.006 | 0.115 | 0.083 | 0.331 | 0.186 |
| T5 vs. T10 | 0.528 | 0.646 | 0.894 | 0.705 | ||||
| % | IRT5 | LrT5 | L50T5 | O10T5 | IRT10 | LrT10 | L50T10 | O10T10 |
|---|---|---|---|---|---|---|---|---|
| RTN | 78.9 | 79.2 | 75.7 | 86.0 | 79.6 | 79.2 | 74.9 | 86.2 |
| ANE | 17.9 | 17.5 | 19.9 | 11.8 | 17.4 | 17.7 | 20.5 | 11.7 |
| Mixed | 33.0 | 34.0 | 40.3 | 30.3 | 32.5 | 33.4 | 39.8 | 31.0 |
| Even | 3.1 | 3.1 | 3.9 | 2.3 | 3.1 | 3.0 | 4.1 | 2.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsina-Pagès, R.M.; Benocci, R.; Brambilla, G.; Zambon, G. Methods for Noise Event Detection and Assessment of the Sonic Environment by the Harmonica Index. Appl. Sci. 2021, 11, 8031. https://doi.org/10.3390/app11178031
Alsina-Pagès RM, Benocci R, Brambilla G, Zambon G. Methods for Noise Event Detection and Assessment of the Sonic Environment by the Harmonica Index. Applied Sciences. 2021; 11(17):8031. https://doi.org/10.3390/app11178031
Chicago/Turabian StyleAlsina-Pagès, Rosa Ma, Roberto Benocci, Giovanni Brambilla, and Giovanni Zambon. 2021. "Methods for Noise Event Detection and Assessment of the Sonic Environment by the Harmonica Index" Applied Sciences 11, no. 17: 8031. https://doi.org/10.3390/app11178031
APA StyleAlsina-Pagès, R. M., Benocci, R., Brambilla, G., & Zambon, G. (2021). Methods for Noise Event Detection and Assessment of the Sonic Environment by the Harmonica Index. Applied Sciences, 11(17), 8031. https://doi.org/10.3390/app11178031