
Design, Optimization and Evaluation of a New Cylinder Attachment Geometry to Improve the Hopping Height of the Bionic One-Legged Robot



Abstract
:1. Introduction
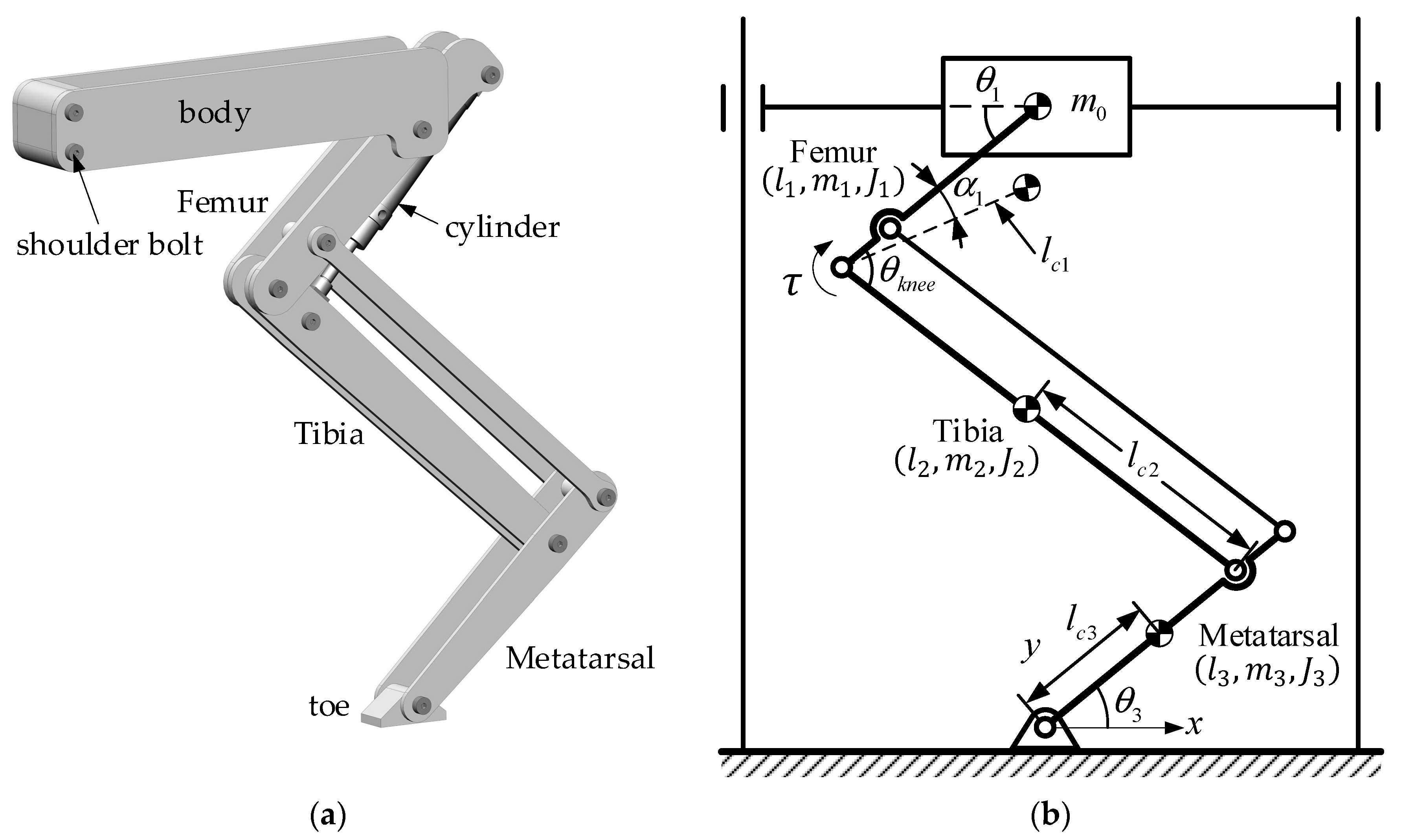
2. Kangaroo Inspired One-Legged Robot
3. Vertical Hopping of the Kangaroo Inspired One-Legged Robot under the DAG and FMAG
3.1. Dynamic of the Vertical Hopping of the Kangaroo Inspired One-Legged Robot
3.2. The DAG of the Cylinder
3.3. The FMAG of the Cylinder in the Knee Joint
3.4. Dynamic of the Pressures of the Cylinder
4. Optimization of These Two Attachment Geometries
5. Experiment
5.1. Experimental Setup
5.2. Experiment Results
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Raibert, M.H.; Brown, H.B. Experiments in Balance with a 2D One-Legged Hopping Machine. J. Dyn. Syst. Meas. Control Trans. ASME 1984, 106, 75–81. [Google Scholar] [CrossRef]
- Hodgins, J.K.; Raibert, M.H. Biped gymnastics. Artif. Intell. MIT 1990, 9, 115–128. [Google Scholar] [CrossRef]
- Raibert, M.H.; Tello, E.R. Legged Robots That Balance; MIT Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Gregorio, P.; Ahmadi, M.; Buehler, M. Design, control, and energetics of an electrically actuated legged robot. IEEE Trans. Syst. Man Cybern. Syst. 1997, 27, 626–634. [Google Scholar] [CrossRef]
- Ahmadi, M.; Buehler, M. Stable control of a simulated one-legged running robot with hip and leg compliance. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 21–27 April 1997; pp. 96–104. [Google Scholar]
- Zhou, X.; Bi, S. A survey of bio-inspired compliant legged robot designs. Bioinspir. Biomim. 2012, 7, 41001. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, J.; Chen, H.; Chen, D. A Survey of Bioinspired Jumping Robot: Takeoff, Air Posture Adjustment, and Landing Buffer. Appl. Bionics Biomech. 2017, 2017, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Mo, X.; Ge, W.; Miraglia, M.; Inglese, F.; Zhao, D.; Stefanini, C.; Romano, D. Jumping Locomotion Strategies: From Animals to Bioinspired Robots. Appl. Sci. 2020, 10, 8607. [Google Scholar] [CrossRef]
- Lee, W.; Raibert, M. Control of hoof rolling in an articulated leg. In Proceedings of the IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; pp. 1386–1391. [Google Scholar]
- Hyon, S.H.; Mita, T. Development of a biologically inspired hopping robot-“Kenken”. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation, Washington DC, USA, 10–17 May 2002; pp. 3984–3991. [Google Scholar]
- Hyon, S.H.; Emura, T.; Mita, T. Dynamics-based control of a one-legged hopping robot. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2003, 217, 83–98. [Google Scholar] [CrossRef]
- Raibert, M.; Blankespoor, K.; Nelson, G.; Playter, R. BigDog, the Rough-Terrain Quadruped Robot. In Proceedings of the 17th World Congress the International Federation of Automatic Control, Seoul, Korea, 6–11 July 2008; pp. 10822–10825. [Google Scholar]
- Semini, C.; Tsagarakis, N.G.; Vanderborght, B.; Yang, Y.; Caldwell, D.G. HyQ—Hydraulically actuated quadruped robot: Hopping leg prototype. In Proceedings of the International Conference on Biomedical Robotics and Biomechatronics, Scottsdale, AZ, USA, 19–22 October 2008; pp. 593–599. [Google Scholar]
- Semini, C.; Tsagarakis, N.G.; Guglielmino, E.; Focchi, M.; Cannella, F.; Caldwell, D.G. Design of HyQ—A hydraulically and electrically actuated quadruped robot. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2011, 225, 831–849. [Google Scholar] [CrossRef]
- Semini, C.; Barasuol, V.; Goldsmith, J.; Frigerio, M.; Focchi, M.; Gao, Y.; Caldwell, D.G. Design of the Hydraulically Actuated, Torque-Controlled Quadruped Robot HyQ2Max. IEEE ASME Trans. Mechatron. 2017, 22, 635–646. [Google Scholar] [CrossRef]
- Rong, X.; Li, Y.; Ruan, J.; Li, B. Design and simulation for a hydraulic actuated quadruped robot. J. Mech. Sci. Technol. 2012, 26, 1171–1177. [Google Scholar] [CrossRef]
- Chen, X.; Gao, F.; Qi, C.; Tian, X.; Zhang, J. Spring Parameters Design for the New Hydraulic Actuated Quadruped Robot. J. Mech. Robot. 2014, 6, 21003. [Google Scholar] [CrossRef]
- Reilly, S.M.; Elias, J.A. Locomotion in Alligator Mississippiensis: Kinematic Effects of Speed and Posture and Their Relevance to the Sprawling-To-Erect Paradigm. J. Exp. Biol. 1998, 201, 2559–2574. [Google Scholar]
- Shriyam, S.; Mishra, A.; Nayak, D.; Thakur, A. Design, fabrication, and gait planning of alligator-inspired robot. Int. J. Curr. Eng. Technol. 2014, 2, 567–575. [Google Scholar] [CrossRef]
- Tian, Y.; Pesika, N.; Zeng, H.; Rosenberg, K.; Zhao, B.; McGuiggan, P.; Autumn, K.; Israelachvili, J.N. Adhesion and friction in gecko toe attachment and detachment. Proc. Natl. Acad. Sci. USA 2006, 103, 19320–19325. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Spenko, M.; Trujillo, S.; Heyneman, B.; Santos, D.; Cutkosky, M.R. Smooth Vertical Surface Climbing with Directional Adhesion. IEEE Trans. Robot. 2008, 24, 65–74. [Google Scholar]
- Astley, H.C.; Roberts, T.J. Evidence for a vertebrate catapult: Elastic energy storage in the plantaris tendon during frog jumping. Biol. Lett. 2012, 8, 386–389. [Google Scholar] [CrossRef] [Green Version]
- Azizi, E.; Roberts, T.J. Muscle performance during frog jumping: Influence of elasticity on muscle operating lengths. Proc. R. Soc. B Biol. Sci. 2010, 277, 1523–1530. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.; Zang, X.Z.; Fan, J.Z.; Zhao, J. Biological jumping mechanism analysis and modeling for frog robot. J. Bionic Eng. 2008, 5, 181–188. [Google Scholar] [CrossRef]
- Aerts, P. Vertical jumping in Galago senegalensis: The quest for an obligate mechanical power amplifier. Philos. Trans. R. Soc. Lond. B Biol. Sci. 1998, 353, 1607–1620. [Google Scholar] [CrossRef] [Green Version]
- Mo, X.; Romano, D.; Miraglia, M.; Ge, W.; Stefanini, C. Effect of Substrates’ Compliance on the Jumping Mechanism of Locusta migratoria. Front. Bioeng. Biotechnol. 2020, 8, 661. [Google Scholar] [CrossRef]
- Romano, D.; Bloemberg, J.; Tannous, M.; Stefanini, C. Impact of Aging and Cognitive Mechanisms on High-Speed Motor Activation Patterns: Evidence from an Orthoptera-Robot Interaction. IEEE Trans. Med. Robot. Bionics 2020, 2, 292–296. [Google Scholar] [CrossRef]
- Romano, D.; Benelli, G.; Stefanini, C. Encoding lateralization of jump kinematics and eye use in a locust via bio-robotic artifacts. J. Exp. Biol. 2019, 222, jeb187427. [Google Scholar] [CrossRef] [Green Version]
- Romano, D.; Benelli, G.; Stefanini, C. Escape and surveillance asymmetries in locusts exposed to a Guinea fowl-mimicking robot predator. Sci. Rep. 2017, 7, 12825. [Google Scholar] [CrossRef] [Green Version]
- Sutton, G.P.; Burrows, M. Biomechanics of jumping in the flea. J. Exp. Biol. 2011, 214, 836–847. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Haldane, D.W.; Plecnik, M.M.; Yim, J.K.; Fearing, R.S. Robotic vertical jumping agility via series-elastic power modulation. Sci. Robot. 2016, 1, eaag2048. [Google Scholar] [CrossRef] [Green Version]
- Plecnik, M.M.; Haldane, D.W.; Yim, J.K.; Fearing, R.S. Design exploration and kinematic tuning of a power modulating jumping monopod. J. Mech. Robot. 2017, 9, 011009. [Google Scholar] [CrossRef]
- Noh, M.; Kim, S.W.; An, S.; Koh, J.S.; Cho, K.J. Flea-inspired catapult mechanism for miniature jumping robots. IEEE Trans. Robot. 2012, 28, 1007–1018. [Google Scholar]
- Kovac, M.; Fuchs, M.; Guignard, A.; Zufferey, J.C.; Floreano, D. A miniature 7 g jumping robot. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 373–378. [Google Scholar]
- Chen, D.; Yin, J.; Zhao, K.; Zheng, W.; Wang, T. Bionic mechanism and kinematics analysis of hopping robot inspired by locust jumping. J. Bionic Eng. 2011, 8, 429–439. [Google Scholar] [CrossRef]
- Zhang, J.; Song, G.; Li, Y.; Qiao, G.; Song, A.; Wang, A. A bio-inspired jumping robot: Modeling, simulation, design, and experimental results. Mechatronics 2013, 23, 1123–1140. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, Q.; Gui, S.; Chang, B.; Zhao, J.; Yang, H.; Chen, D. Mechanism design for locust-inspired robot with one-DOF leg based on jumping stability. Mech. Mach. Theory 2019, 133, 584–605. [Google Scholar] [CrossRef]
- Koh, J.S.; Jung, S.P.; Noh, M.; Kim, S.W.; Cho, K.J. Flea inspired catapult mechanism with active energy storage and release for small scale jumping robot. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 26–31. [Google Scholar]
- Curran, S.; Knox, B.T.; Schmiedeler, J.P.; Orin, D.E. Design of Series-Elastic Actuators for Dynamic Robots with Articulated Legs. J. Mech. Robot. 2009, 1, 11006. [Google Scholar] [CrossRef]
- Vanderborght, B.; Tsagarakis, N.G.; Ham, R.; Thorson, I.; Caldwell, D.G. MACCEPA 2.0: Compliant actuator used for energy efficient hopping robot Chobino1D. Auton. Robot. 2011, 31, 55–65. [Google Scholar] [CrossRef]
- Okada, M.; Takeda, Y. Optimal design of nonlinear profile of gear ratio using non-circular gear for jumping robot. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1958–1963. [Google Scholar]
- Verstraten, T.; Furnemont, R.; Beckerle, P.; Vanderborght, B.; Lefeber, D. A Hopping Robot Driven by a Series Elastic Dual-Motor Actuator. IEEE Robot. Autom. Lett. 2019, 4, 2310–2316. [Google Scholar] [CrossRef]
- Ananthanarayanan, A.; Azadi, M.; Kim, S. Towards a bio-inspired leg design for high-speed running. Bioinspir. Biomim. 2012, 7, 46005. [Google Scholar] [CrossRef]
- Seok, S.O.; Wang, A.D.; Chuah, M.Y.; Hyun, D.J.; Lee, J.; Otten, D.M.; Lang, J.H.; Kim, S. Design Principles for Energy-Efficient Legged Locomotion and Implementation on the MIT Cheetah Robot. IEEE ASME Trans. Mechatron. 2015, 20, 1117–1129. [Google Scholar] [CrossRef] [Green Version]
- McGowan, C.P.; Skinner, J.; Biewener, A.A. Hind limb scaling of kangaroos and wallabies (superfamily Macropodoidea): Implications for hopping performance, safety factor and elastic savings. J. Anat. 2008, 212, 153–163. [Google Scholar] [CrossRef] [PubMed]
- Kear, B.P.; Lee, M.S.Y.; Gerdtz, W.R.; Flannery, T.F. Evolution of hind limb proportions in kangaroos (Marsupialia: Macropodoidea). In Mammalian Evolutionary Morphology. Vertebrate Paleobiology and Paleoanthropology Series; Sargis, E.J., Dagosto, M., Eds.; Springer: Dordrecht, The Netherlands, 2008; pp. 25–35. [Google Scholar]
- Bucolo, M.; Buscarino, A.; Famoso, C.; Fortuna, L.; Frasca, M. Control of imperfect dynamical systems. Nonlinear Dyn. 2019, 98, 2989–2999. [Google Scholar] [CrossRef]
- Dawson, R.S.; Warburton, N.M.; Richards, H.L.; Milne, N. Walking on five legs: Investigating tail use during slow gait in kangaroos and wallabies. Aust. J. Zool. 2015, 63, 192–200. [Google Scholar] [CrossRef]
- McGowan, C.P.; Baudinette, R.V.; Biewener, A.A. Modulation of proximal muscle function during level versus incline hopping in tammar wallabies (Macropus eugenii). J. Exp. Biol. 2007, 210, 1255–1265. [Google Scholar] [CrossRef] [Green Version]
- Biewener, A.A.; McGowan, C.; Card, G.M.; Baudinette, R.V. Dynamics of leg muscle function in tammar wallabies (M. eugenii) during level versus incline hopping. J. Exp. Biol. 2004, 207, 211–223. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| (m) | 0.2 | (kgm2) | 0.05 |
| (kg) | 1.72 | (m) | 0.26 |
| (kgm2) | 0.0631 | (m) | 0.2 |
| (m) | 0.174 | (kg) | 0.52 |
| (°) | 5 | (kgm2) | 0.0131 |
| (m) | 0.4 | (m) | 0.12 |
| (kg) | 0.908 | (kg) | 10 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| (MPa) | (m) | 0.256 | |
| (m3) | cylinder stroke (m) | 0.07 | |
| (m3) | (m2) | ||
| () | (m2) |
| Optimized Design Parameters | |
|---|---|
| DAG | |
| FMAG |
| Maximum Hopping Height | Take-Off Speed | Take-Off Duration | Maximum Pressure Drop | |
|---|---|---|---|---|
| DAG | 1.122 m | 2.69 m/s | 0.32 s | 5.4 MPa |
| FMAG | 1.241 m | 3.04 m/s | 0.27 s | 4 MPa |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, D.; Ge, W.; Mo, X.; Li, Y.; Wang, Z. Design, Optimization and Evaluation of a New Cylinder Attachment Geometry to Improve the Hopping Height of the Bionic One-Legged Robot. Appl. Sci. 2021, 11, 3676. https://doi.org/10.3390/app11083676
Zhao D, Ge W, Mo X, Li Y, Wang Z. Design, Optimization and Evaluation of a New Cylinder Attachment Geometry to Improve the Hopping Height of the Bionic One-Legged Robot. Applied Sciences. 2021; 11(8):3676. https://doi.org/10.3390/app11083676
Chicago/Turabian StyleZhao, Donglai, Wenjie Ge, Xiaojuan Mo, Yuzhu Li, and Zhuo Wang. 2021. "Design, Optimization and Evaluation of a New Cylinder Attachment Geometry to Improve the Hopping Height of the Bionic One-Legged Robot" Applied Sciences 11, no. 8: 3676. https://doi.org/10.3390/app11083676