
Controlling the Generator in a Series of Hybrid Electric Vehicles Using a Positive Position Feedback Controller



Abstract
:1. Introduction
2. Closed Loop Model
2.1. System Dynamics without Control
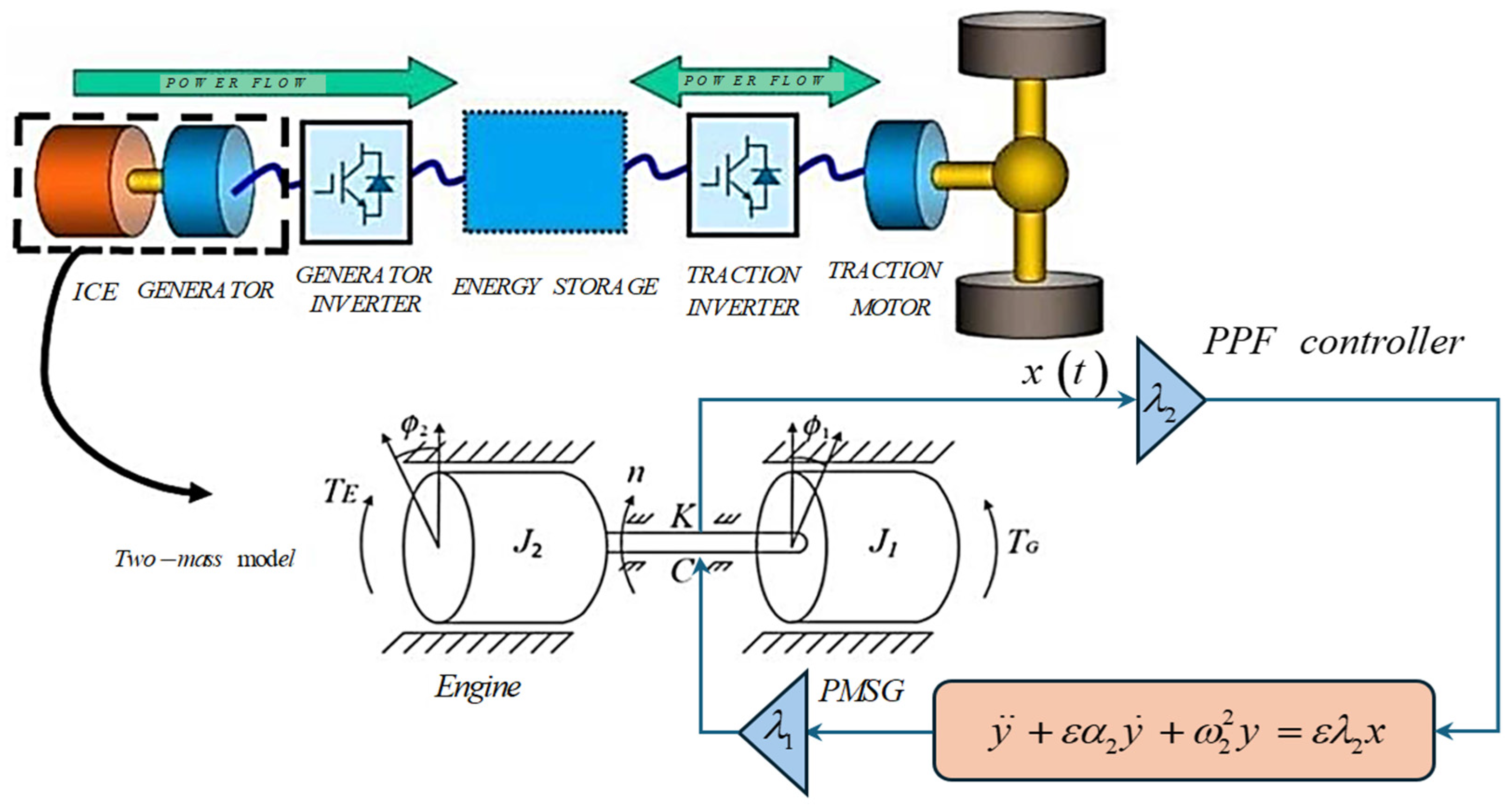
2.2. System Dynamics with PPF Control
3. Mathematical Investigations
3.1. Perturbation Analysis
- SHR: .
- IR: .
3.2. Periodic Solutions
3.3. A Certain Solution
3.4. Stability Analysis via Linearizing the above System
4. Results and Discussion
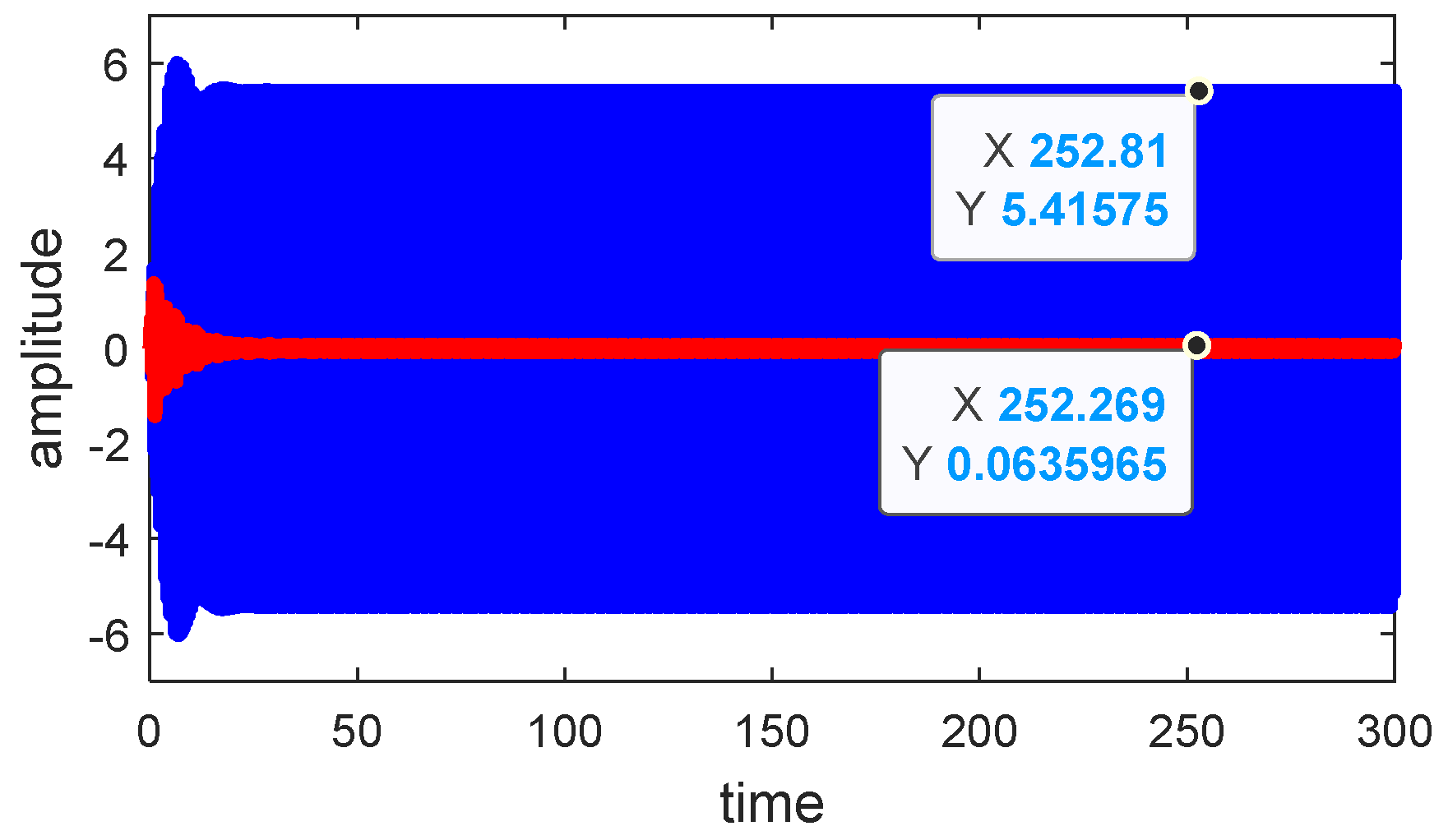
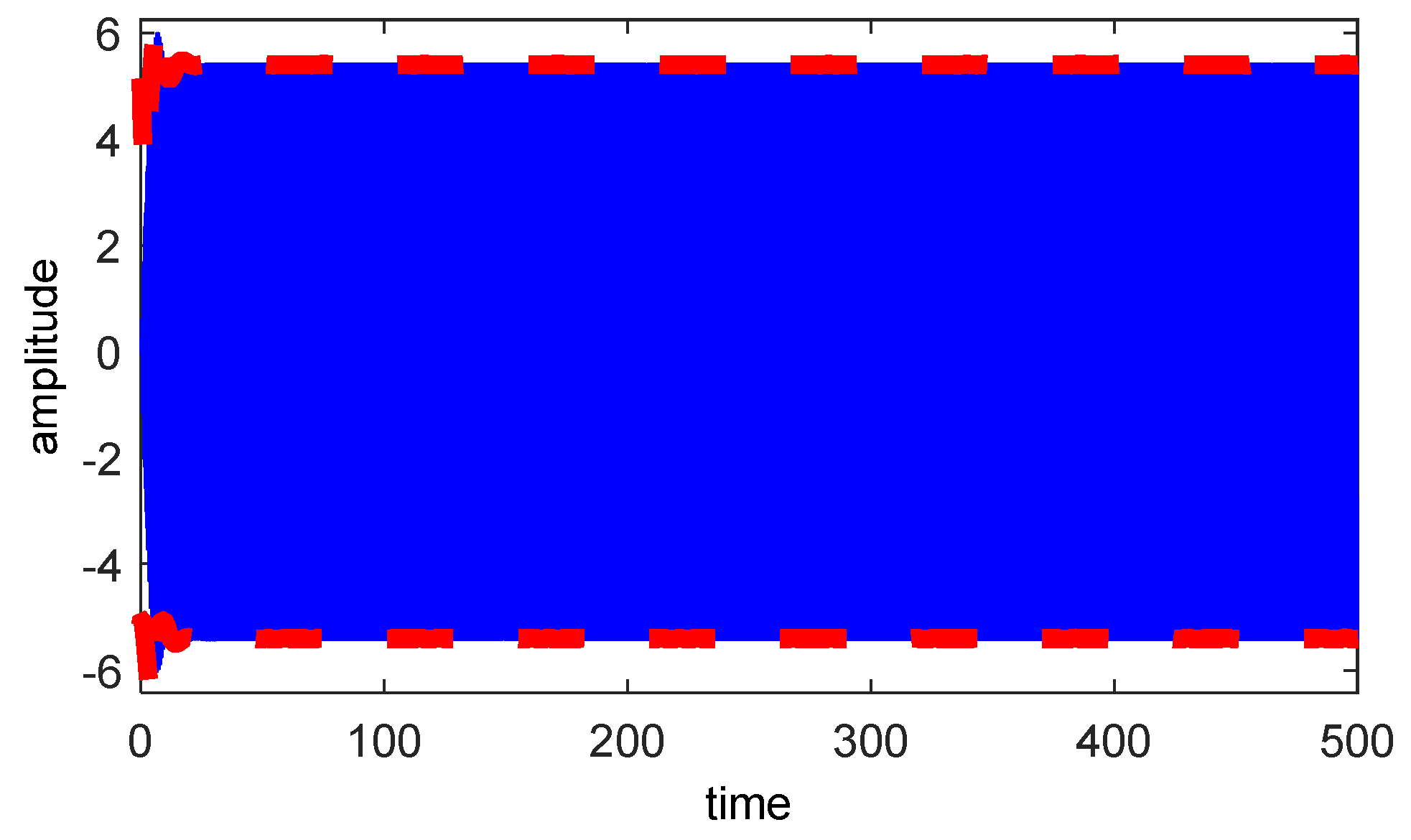
4.1. Effectiveness of PPF Control on Time History
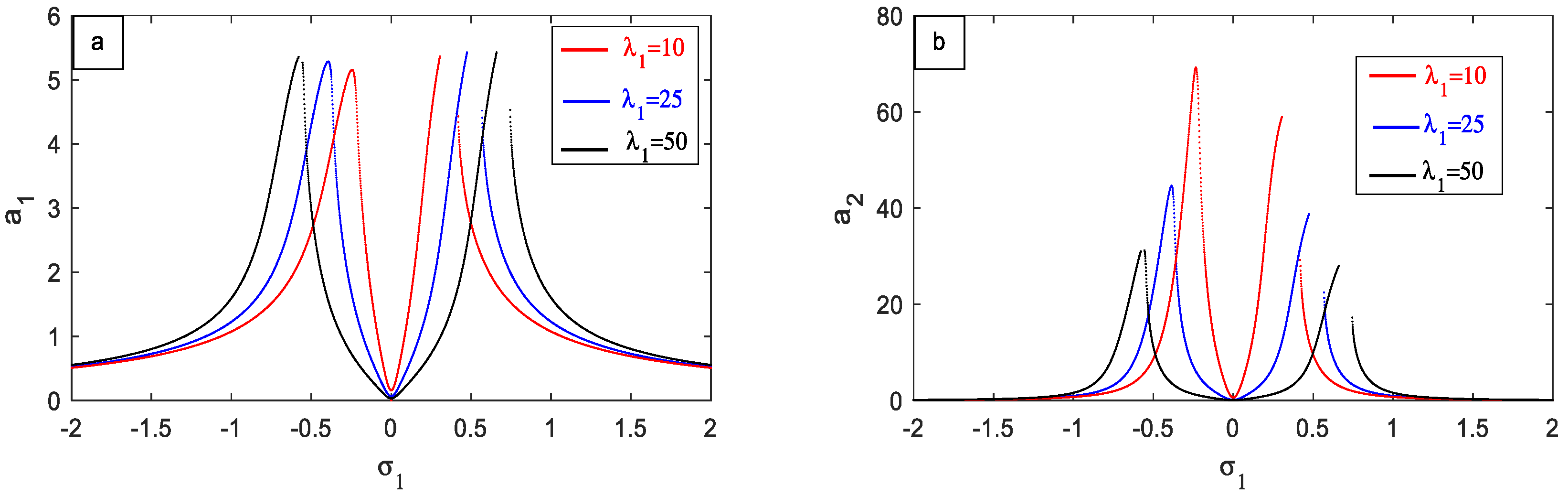
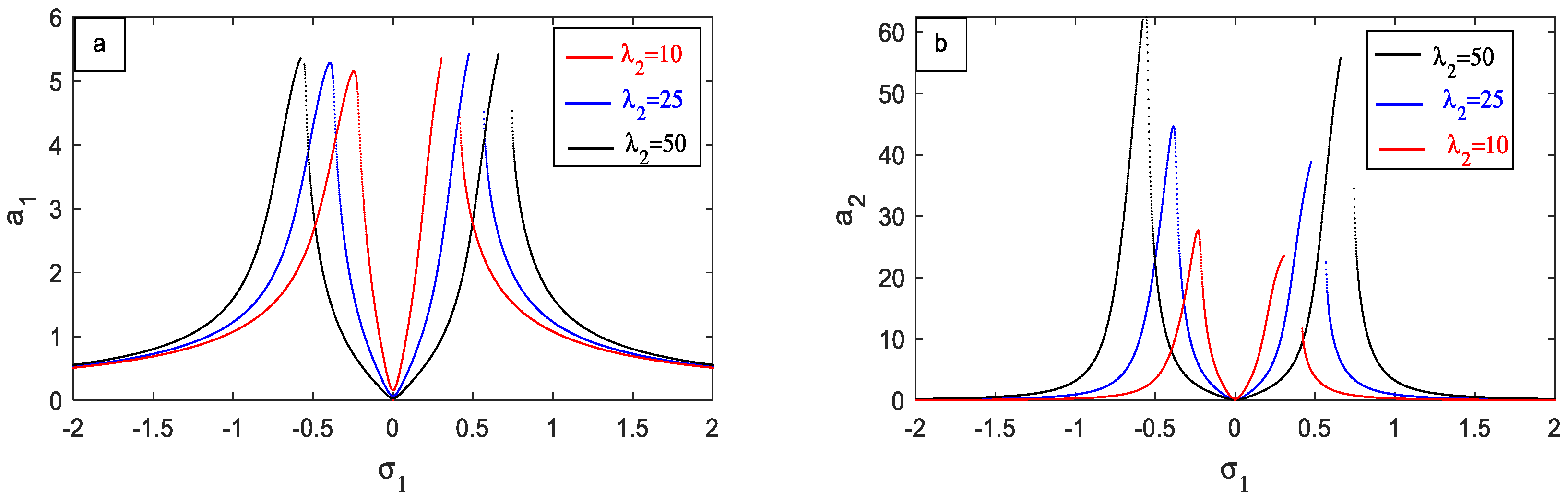
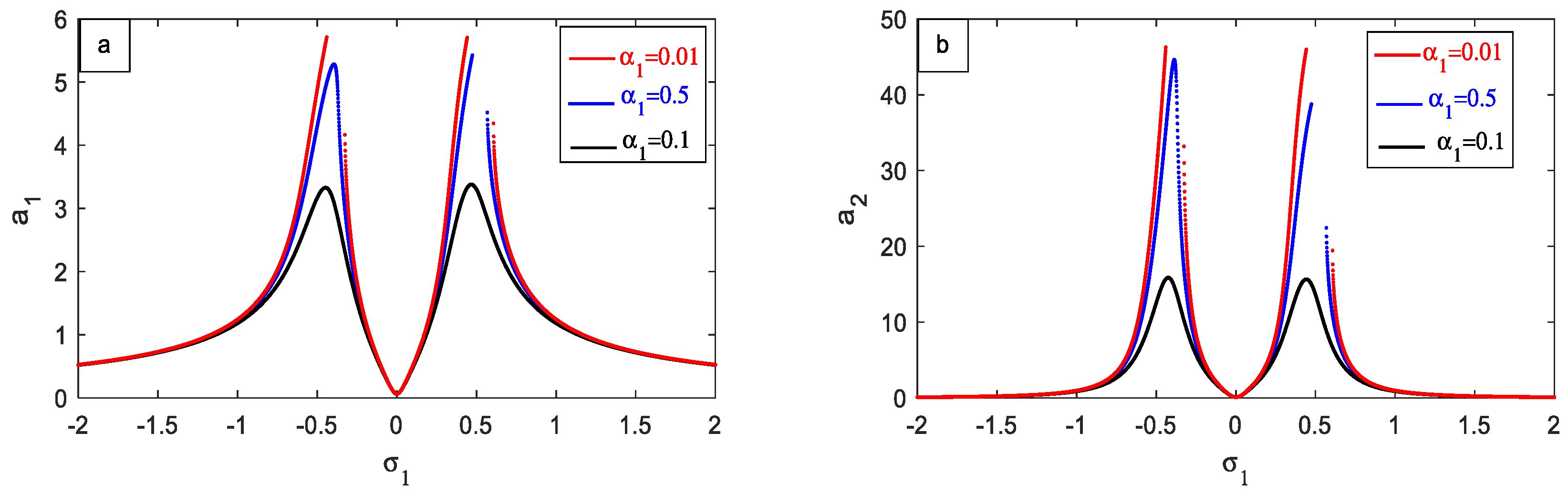
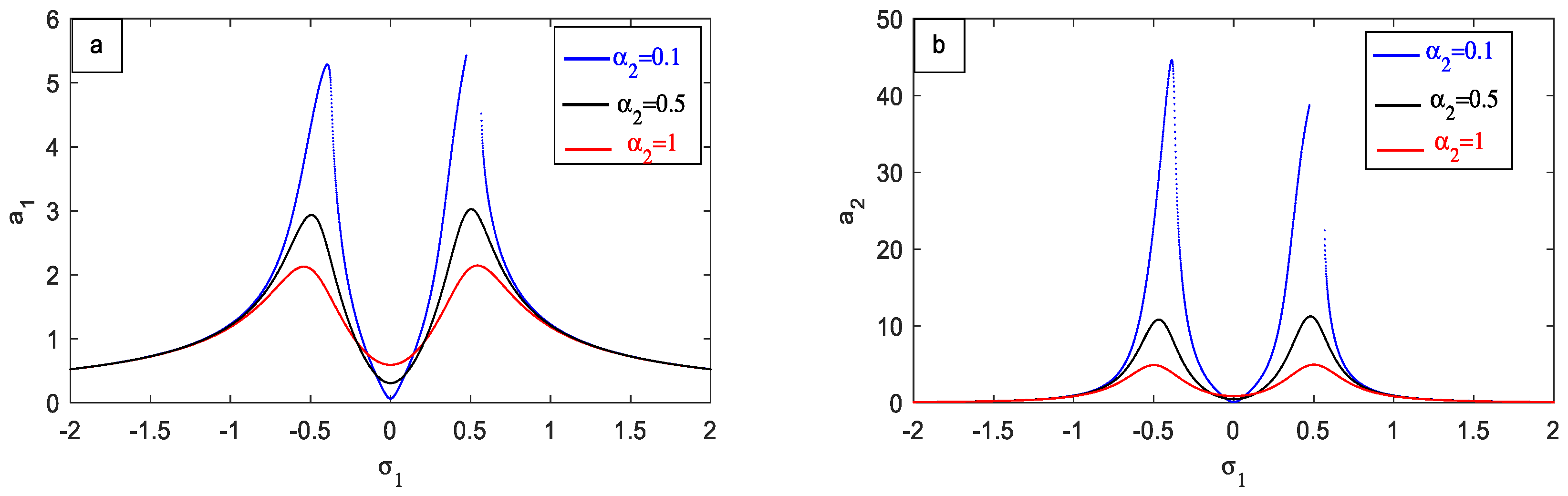
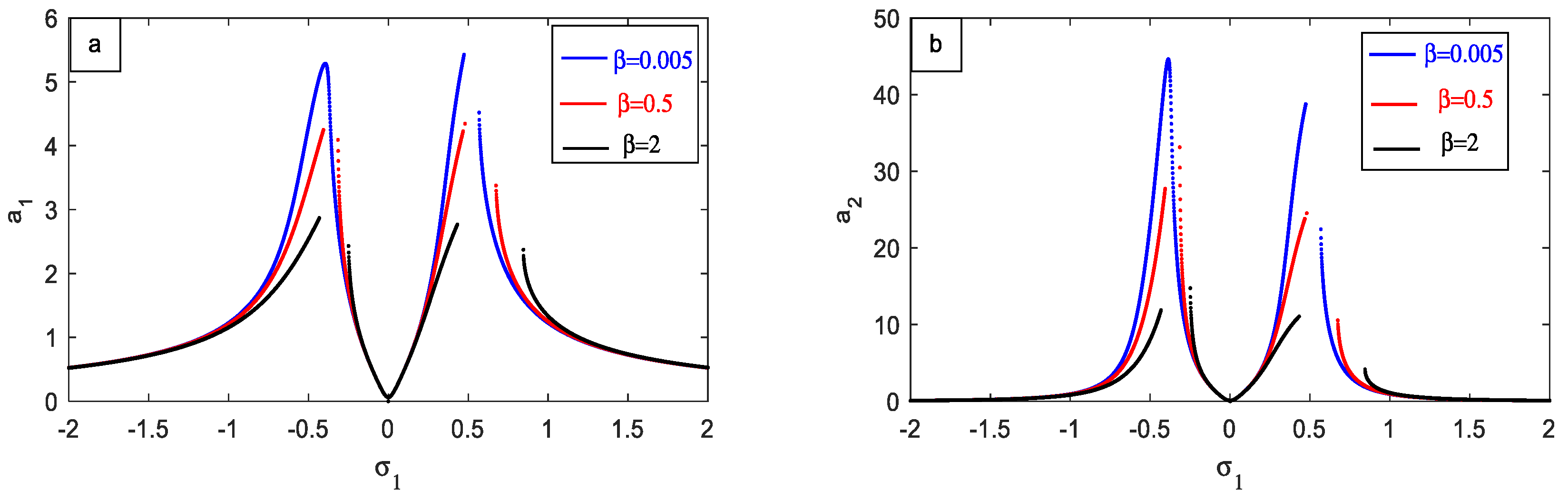
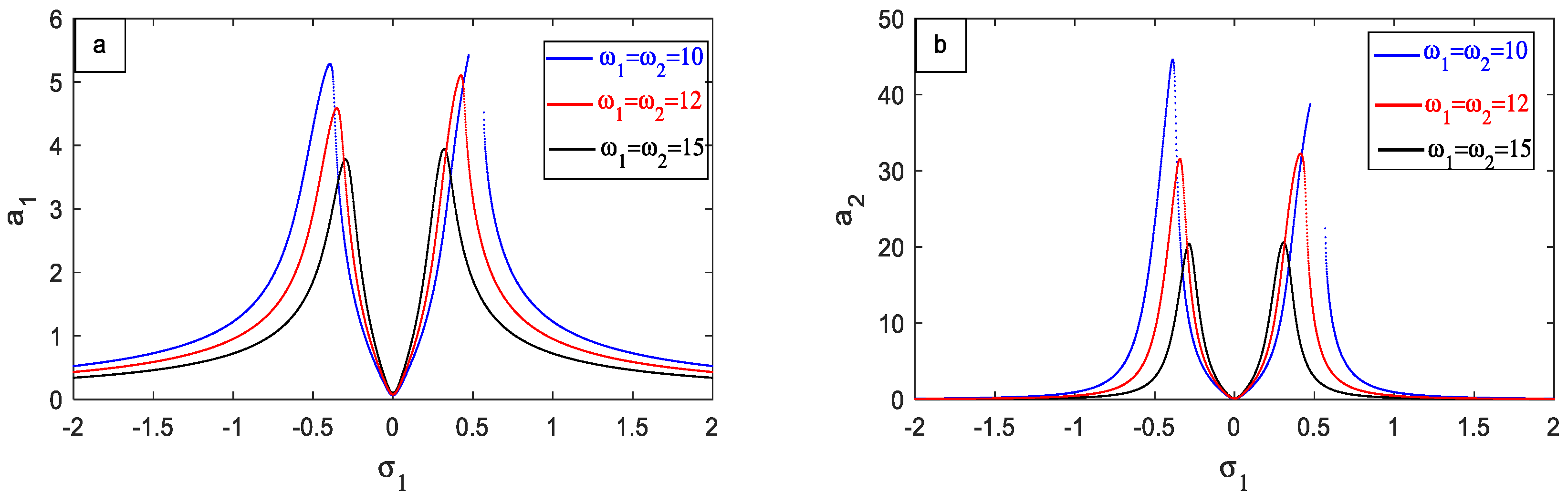
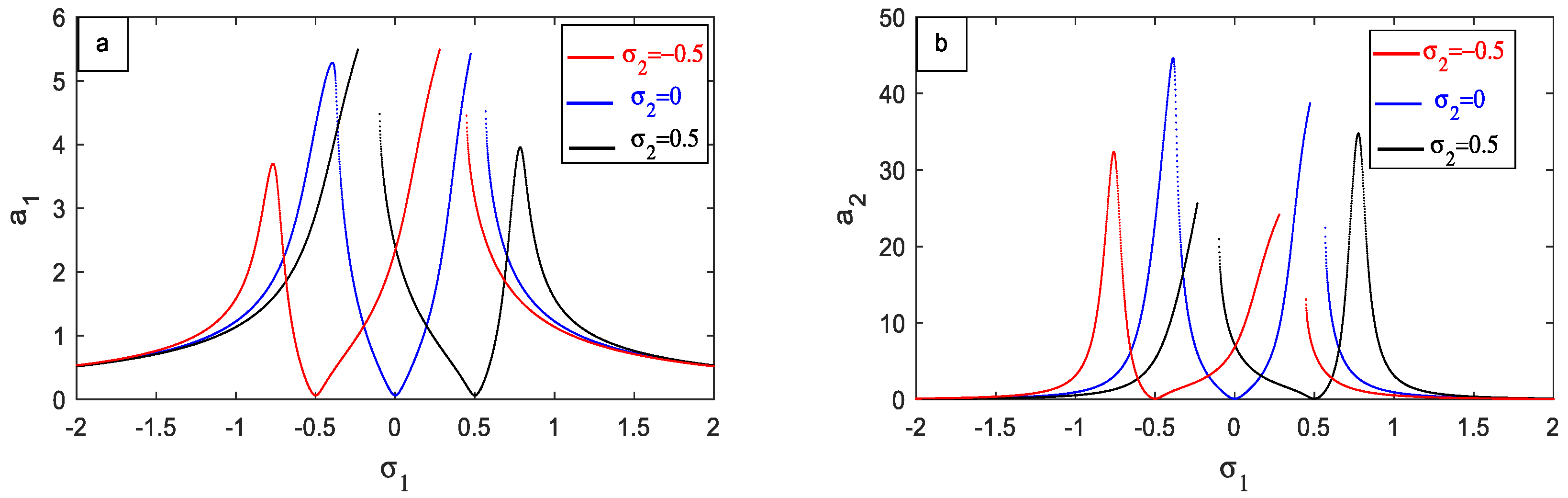
4.2. Frequency Response Curves (FRC)
5. Comparison
5.1. Comparison between Different Controllers with Time History Performance
5.2. Comparison between Time History and Frequency Response Curves
5.3. Comparison between Analytical and Numerical Solutions before and after the Controller
5.4. Comparison with Previous Work
6. Conclusions
- In order to design the PPF controller effectively, it is essential to adjust its natural frequency, denoted as , to match the frequencies of both the external force, represented by , and the natural frequency of the (HEVs), denoted as . This alignment ensures the optimal performance and stability of the controller in response to the external force and the inherent dynamics of the (HEVs) system.
- The positive position feedback (PPF) controller demonstrates notable effectiveness in mitigating high-amplitude vibrations within nonlinear systems.
- The SHR and IR case & is one of the vibrating system’s most severe resonance cases.
- The amplitude of the vibrating system has decreased by approximately 98% after utilizing the PPF feedback controller compared to its value without control.
- The effectiveness of the PPF feedback controller, denoted as Ea., reaches approximately 90, showcasing its high efficacy in controlling the system’s behavior.
- The response or behavior of the controlled system intensifies with the escalation of the external excitation force .
- The response of the main system has decreased with increasing the natural frequency .
- The curves are shifted to right with increasing the value of the PPF parameter , which is advantageous in the performance of the PPF controller.
- For the PPF parameter, the amplitude of the controlled system decreases very slowly.
- The solutions obtained from the frequency response curves (FRC) align well with those derived from the Runge–Kutta 4th order (RK-4) method.
- The closed loop response of relative displacement is obtained with PPF controller which comprises the peak-overshoot.
- The modified structure of the PPF controller is used for the control of relative displacement of suspension system. From the results, the PPF controller provided better closed loop performance in terms peak overshoot and settling time are minimized.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Displacement, velocity, and acceleration of the initial mood of the system, correspondingly. | |
| System control influencing displacement, velocity, and acceleration. | |
| System and control damping coefficients, respectively. | |
| The regularity of nature of system and control respectively. | |
| The magnitude and frequency of an external excitation force or external forces applied to a system. | |
| Nonlinear coefficients of the main system. | |
| The coefficient of PPF control signal | |
| Small perturbation parameter | |
| Abbreviation | |
| MTSM | Multiple Time Scales Method |
| PPF | The Positive Position Feedback Controller |
| SHR | Super-Harmonic Resonance |
| FREs | Frequency Response Equations |
| IR | Internal Resonance |
| NVC | Negative Velocity Controller |
| ‘RK-4’ | Fourth-order Runge–Kutta |
Appendix A
References
- Wang, H.; Huang, Y.; Khajepour, A.; Zhang, Y.; Rasekhipour, Y.; Cao, D. Crash mitigation in motion planning for autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3313–3323. [Google Scholar] [CrossRef]
- Matharu, H.S.; Girase, V.; Pardeshi, D.B.; William, P. Design and deployment of hybrid electric vehicle. In Proceedings of the 2022 International Conference on Electronics and Renewable Systems (ICEARS), Tuticorin, India, 16–18 March 2022; pp. 331–334. [Google Scholar]
- Belkhier, Y.; Oubelaid, A.; Shaw, R.N. Hybrid power management and control of fuel cells-battery energy storage system in hybrid electric vehicle under three different modes. Energy Storage 2024, 6, e511. [Google Scholar] [CrossRef]
- Al Hla, Y.A.; Othman, M.; Saleh, Y. Optimizing an eco-friendly vehicle routing problem model using regular and occasional drivers integrated with driver behavior control. J. Clean. Prod. 2019, 234, 984–1001. [Google Scholar] [CrossRef]
- Rajagopal, K.; Hussain, I.; Rostami, Z.; Li, C.; Pham, V.T.; Jafari, S. Magnetic induction can control the effect of external electrical stimuli on the spiral wave. Appl. Math. Comput. 2021, 390, 125608. [Google Scholar] [CrossRef]
- Tame tang Meli, M.I.; Leutcho, G.D.; Yemele, D. Multistability analysis and nonlinear vibration for generator set in series hybrid electric vehicle through electromechanical coupling. Chaos: Interdiscip. J. Nonlinear Sci. 2021, 31, 073126. [Google Scholar] [CrossRef]
- Shen, Z.; Luo, C.; Dong, X.; Lu, W.; Lv, Y.; Xiong, G.; Wang, F.Y. Two-Level Energy Control Strategy Based on ADP and A-ECMS for Series Hybrid Electric Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 13178–13189. [Google Scholar] [CrossRef]
- Wang, J.; Yang, H. Low carbon future of vehicle sharing, automation, and electrification: A review of modeling mobility behavior and demand. Renew. Sustain. Energy Rev. 2023, 177, 113212. [Google Scholar] [CrossRef]
- Alatise, O.; Deb, A.; Bashar, E.; Ortiz Gonzalez, J.; Jahdi, S.; Issa, W. A Review of Power Electronic Devices for Heavy Goods Vehicles Electrification: Performance and Reliability. Energies 2023, 16, 4380. [Google Scholar] [CrossRef]
- Smith, D.; Ozpineci, B.; Graves, R.L.; Jones, P.T.; Lustbader, J.; Kelly, K.; Mosbacher, J. Medium-and Heavy-Duty Vehicle Electrification: An Assessment of Technology and Knowledge Gaps (No. ORNL/SPR-2020/7); Oak Ridge National Lab. (ORNL): Oak Ridge, TN, USA; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2020.
- Amer, Y.A.; EL-Sayed, A.T.; Abd EL-Salam, M.N. On controlling of vibrations of a suspended cable via positive position feedback controller. Int. J. Dyn. Control 2023, 11, 370–384. [Google Scholar] [CrossRef]
- He, C.; Tian, D.; Moatimid, G.M.; Salman, H.F.; Zekry, M.H. Hybrid rayleigh–van der pol–duffing oscillator: Stability analysis and controller. J. Low Freq. Noise Vib. Act. Control. 2022, 41, 244–268. [Google Scholar] [CrossRef]
- Jamshidi, R.; Collette, C. Optimal negative derivative feedback controller design for collocated systems based on H2 and H∞ method. Mech. Syst. Signal Process. 2022, 181, 109497. [Google Scholar] [CrossRef]
- Saeed, N.A.; El-Shourbagy, S.M.; Kamel, M.; Raslan, K.R.; Aboudaif, M.K. Nonlinear dynamics and static bifurcations control of the 12-pole magnetic bearings system utilizing the integral resonant control strategy. J. Low Freq. Noise Vib. Act. Control 2022, 41, 1532–1560. [Google Scholar] [CrossRef]
- Ebrahimi, F.; Ahari, M.F. Active vibration control of the multilayered smart nanobeams: Velocity feedback gain effects on the system’s behavior. Acta Mech. 2024, 235, 493–510. [Google Scholar] [CrossRef]
- Kandil, A.; Hamed, Y.S.; Alsharif, A.M. Rotor active magnetic bearings system control via a tuned nonlinear saturation oscillator. IEEE Access 2021, 9, 133694–133709. [Google Scholar] [CrossRef]
- Saeed, N.A.; Awrejcewicz, J.; Elashmawey, R.A.; El-Ganaini, W.A.; Hou, L.; Sharaf, M. On 1/2-DOF active dampers to suppress multistability vibration of a 2-DOF rotor model subjected to simultaneous multiparametric and external harmonic excitations. Nonlinear Dyn. 2024, 112, 12061–12094. [Google Scholar] [CrossRef]
- Amer, Y.A.; El-Sayed, A.T.; Abdel-Wahab, A.M.; Salman, H.F. Positive position feedback controller for nonlinear beam subject to harmonically excitation. Asian Res. J. Math. 2019, 12, 1–19. [Google Scholar] [CrossRef]
- El-Shourbagy, S.M.; Saeed, N.A.; Kamel, M.; Raslan, K.R.; Abouel Nasr, E.; Awrejcewicz, J. On the performance of a nonlinear position-velocity controller to stabilize rotor-active magnetic-bearings system. Symmetry 2021, 13, 2069. [Google Scholar] [CrossRef]
- Bauomy, H.; Taha, A. Nonlinear saturation controller simulation for reducing the high vibrations of a dynamical system. Math. Biosci. Eng. 2022, 19, 3487–3508. [Google Scholar] [CrossRef]
- Moatimid, G.M.; El-Sayed, A.T.; Salman, H.F. Different controllers for suppressing oscillations of a hybrid oscillator via non-perturbative analysis. Sci. Rep. 2024, 14, 307. [Google Scholar] [CrossRef] [PubMed]
- Bauomy, H. Safety action over oscillations of a beam excited by moving load via a new active vibration controller. Math. Biosci. Eng. 2023, 20, 5135–5158. [Google Scholar] [CrossRef]
- Amer, Y.A.; Abd EL-Salam, M.N.; EL-Sayed, M.A. Behavior of a Hybrid Rayleigh-Van der Pol-Duffing Oscillator with a PD Controller. J. Appl. Res. Technol. 2022, 20, 58–67. [Google Scholar]
- Hamed, Y.S.; Alotaibi, H.; El-Zahar, E.R. Nonlinear vibrations analysis and dynamic responses of a vertical conveyor system controlled by a proportional derivative controller. IEEE Access 2020, 8, 119082–119093. [Google Scholar] [CrossRef]
- Kevorkian, J.; Cole, J.D.; Kevorkian, J.; Cole, J.D. The method of multiple scales for ordinary differential equations. In Multiple Scale and Singular Perturbation Methods; Springer: Berlin/Heidelberg, Germany, 1996; pp. 267–409. [Google Scholar]
- Nayfeh, A. Perturbation Methods; Wiley: New York, NY, USA, 1973. [Google Scholar]
- Dukkipati, R.V. Solving Vibration Analysis Problems Using Matlab; New Age International Pvt Ltd. Publishers: Delhi, India, 2007. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RK-4 Solution | FRC | ||
|---|---|---|---|
| −3 | 0.463124975460432 | 0.100187814076129 | 0.362937161384303 |
| −2.7 | 0.463124975460483 | 0.111368846389836 | 0.351756129070647 |
| −2.4 | 0.463124975460878 | 0.125367175821846 | 0.337757799639032 |
| −2.1 | 0.463124975460678 | 0.143405678035335 | 0.319719297425343 |
| −1.8 | 0.463124975460543 | 0.167538818881606 | 0.295586156578937 |
| −1.5 | 0.463361256829522 | 0.201510240778341 | 0.261851016051181 |
| −1.2 | 0.463124975460479 | 0.252961129489559 | 0.21016384597092 |
| −0.9 | 0.463124975460708 | 0.340411579702025 | 0.122713395758683 |
| −0.6 | 0.463124975460622 | 0.524477232033863 | 0.061352256573241 |
| −0.3 | 0.463124975461229 | 1.22474096509607 | 0.761615989634841 |
| 0 | 0.463124975461430 | 0.063492063492063 | 0.399632911969367 |
| 0.3 | 0.463124975460857 | 1.226201951876355 | 0.763076976415498 |
| 0.6 | 0.463569183270159 | 0.524497879643075 | 0.060928696372916 |
| 0.9 | 0.463124975460831 | 0.340411579702025 | 0.122713395758806 |
| 1.2 | 0.463124975460638 | 0.252961129489559 | 0.210163845971079 |
| 1.5 | 0.463124975460543 | 0.201510240778341 | 0.261614734682202 |
| 1.8 | 0.463124975460607 | 0.167538818881606 | 0.295586156579001 |
| 2.1 | 0.463124975461053 | 0.100187814076129 | 0.362937161384924 |
| 2.4 | 0.463124975460740 | 0.111368846389836 | 0.351756129070904 |
| 2.7 | 0.463703390512664 | 0.125367175821846 | 0.338336214690818 |
| 3 | 0.463124975461298 | 0.143405678035335 | 0.319719297425963 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alluhydan, K.; Amer, Y.A.; EL-Sayed, A.T.; EL-Sayed, M.A. Controlling the Generator in a Series of Hybrid Electric Vehicles Using a Positive Position Feedback Controller. Appl. Sci. 2024, 14, 7215. https://doi.org/10.3390/app14167215
Alluhydan K, Amer YA, EL-Sayed AT, EL-Sayed MA. Controlling the Generator in a Series of Hybrid Electric Vehicles Using a Positive Position Feedback Controller. Applied Sciences. 2024; 14(16):7215. https://doi.org/10.3390/app14167215
Chicago/Turabian StyleAlluhydan, Khalid, Yasser A. Amer, Ashraf Taha EL-Sayed, and Marwa A. EL-Sayed. 2024. "Controlling the Generator in a Series of Hybrid Electric Vehicles Using a Positive Position Feedback Controller" Applied Sciences 14, no. 16: 7215. https://doi.org/10.3390/app14167215