
Investigation of the Effect of Physical Ability on the Fall Mitigation Motion Using the Combination of Experiment and Simulation


Abstract
1. Introduction
2. Methods
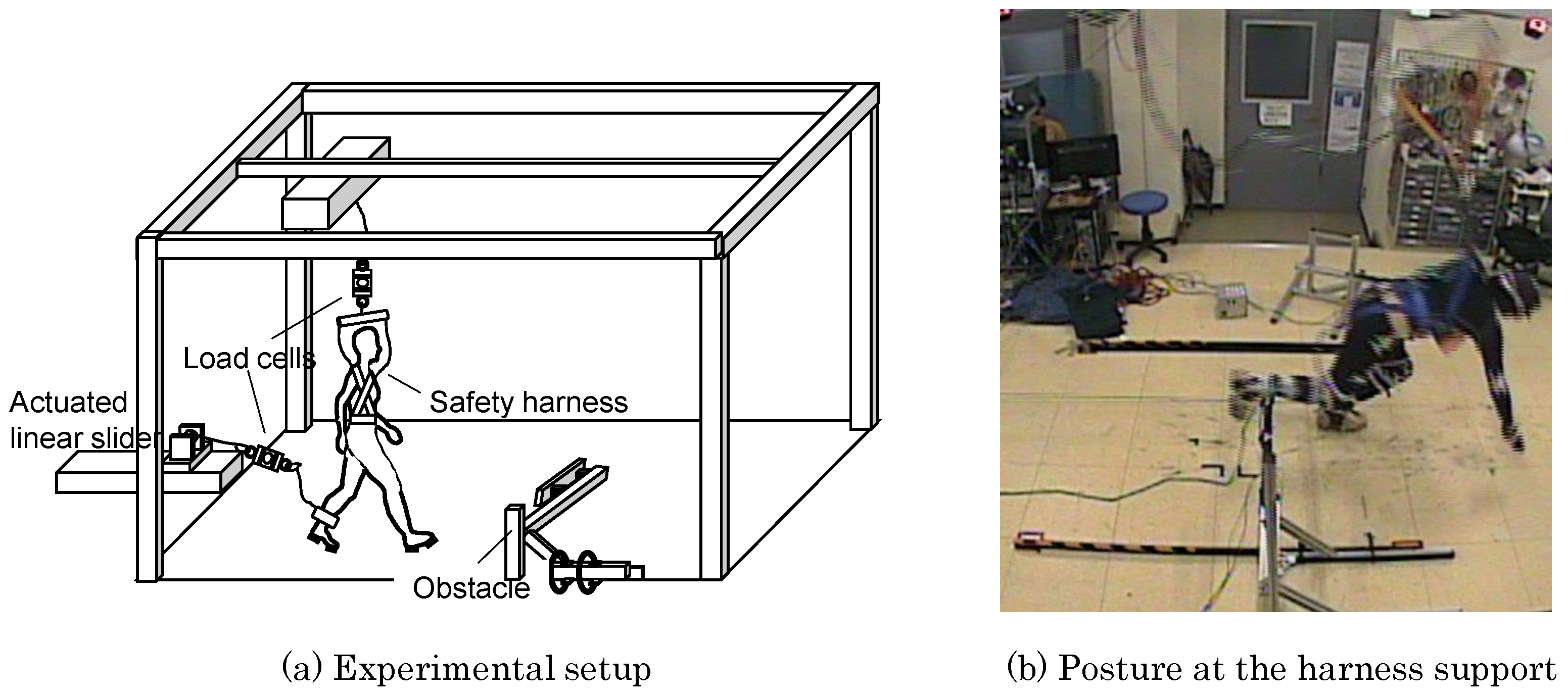
2.1. Fall Movement
2.1.1. Overview
2.1.2. Participant
2.1.3. Data Overview
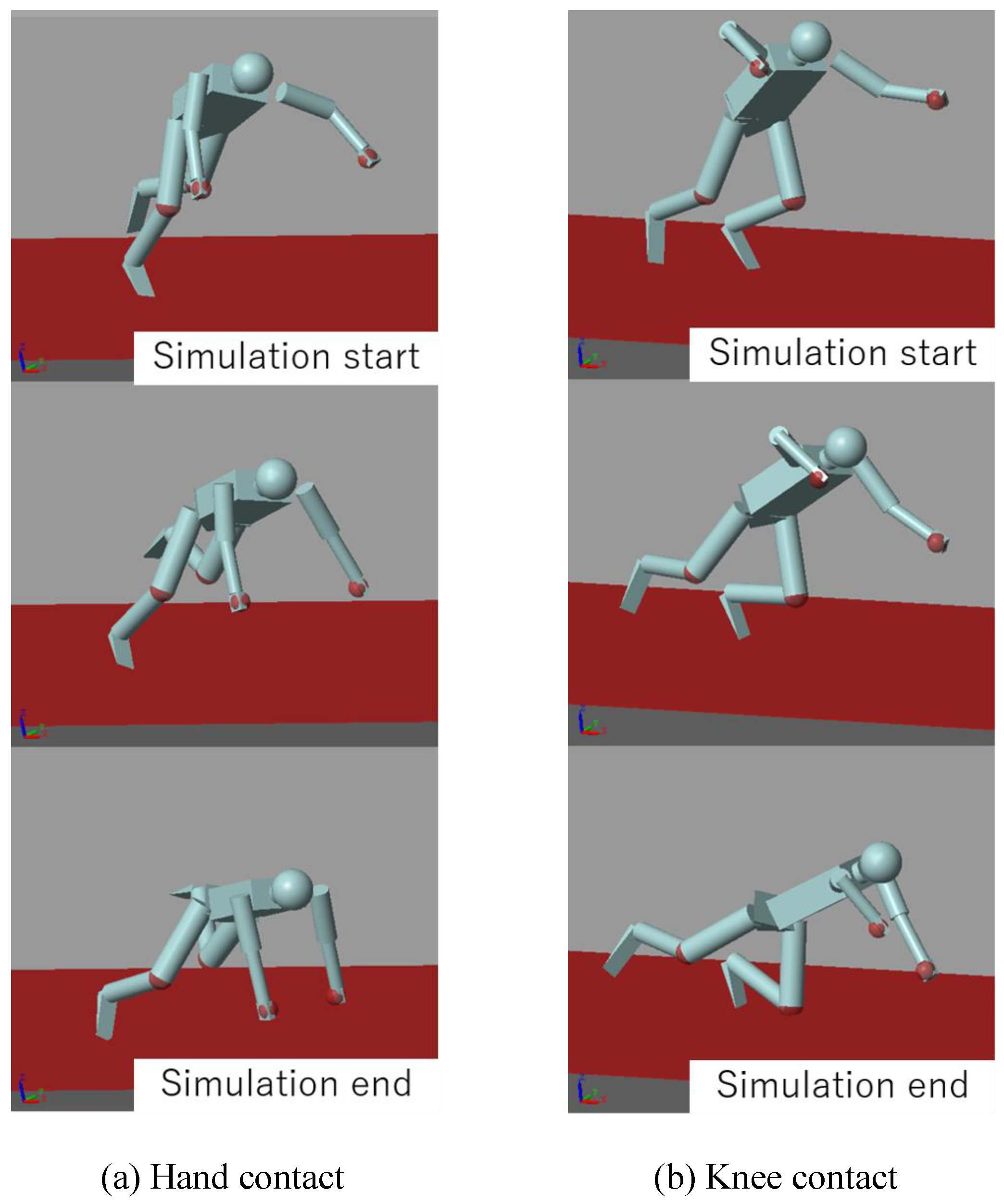
2.2. Fall Simulation
2.2.1. Model and Physical Limits
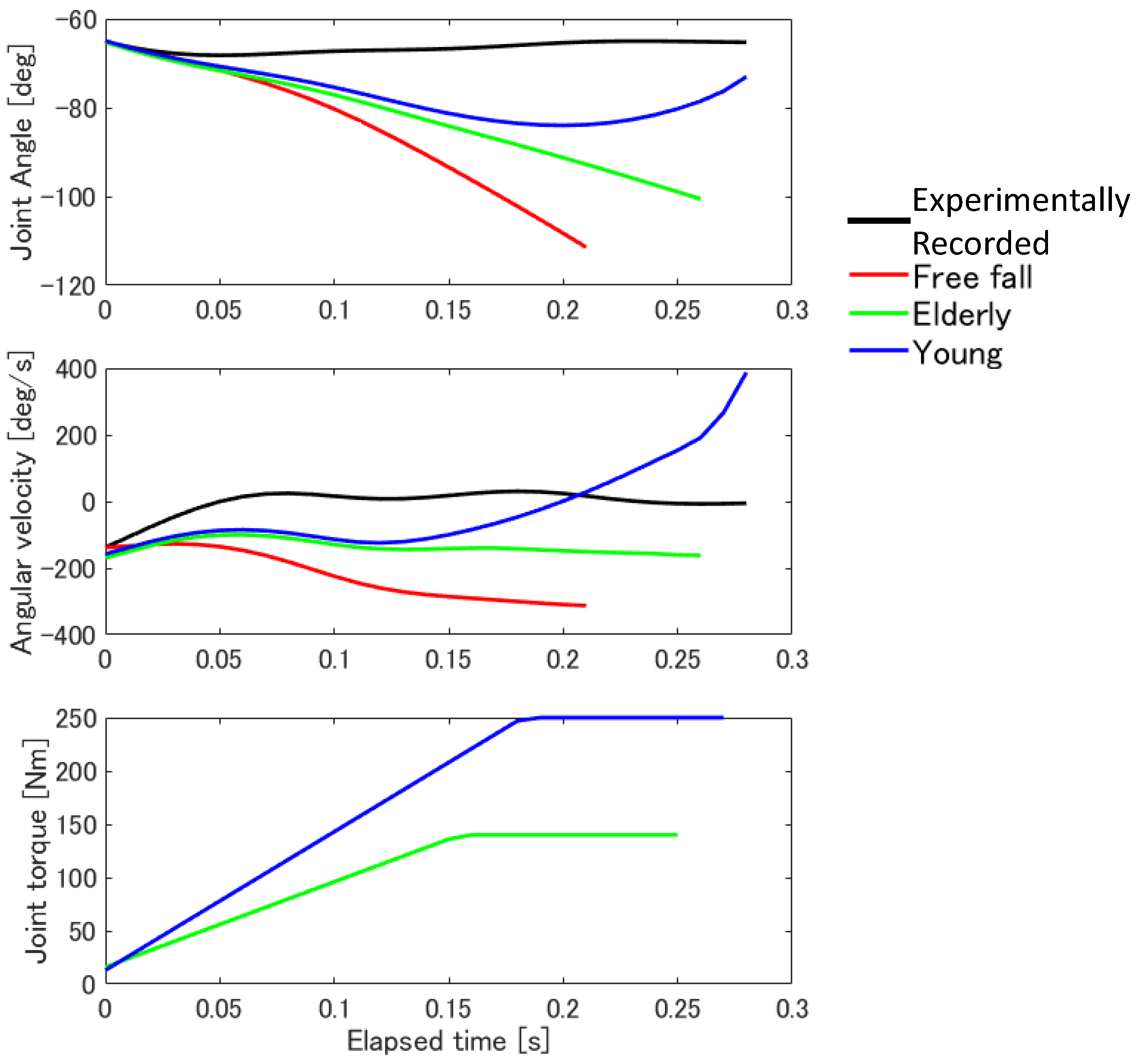
2.2.2. Joint Motion Simulation
2.2.3. Process of Fall Simulation
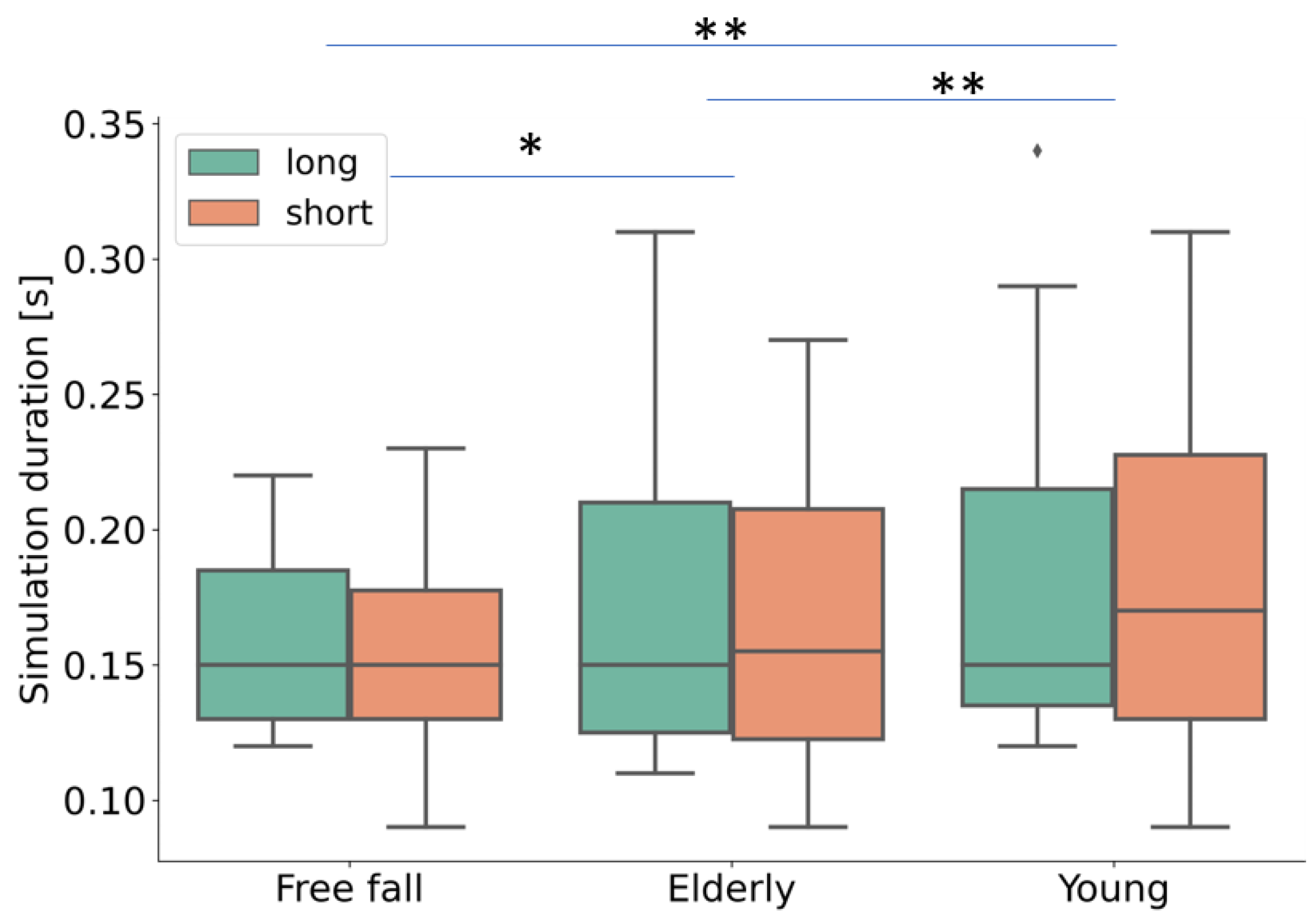
2.3. Data and Statistical Analysis
3. Results
4. Discussion
4.1. The Parameter That Affects Contact Velocity
4.2. The Effect of Condition
4.3. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Luukinen, H.; Herala, M.; Koski, K.; Honkanen, R.; Laippala, P.; Kivelä, S.L. Fracture risk associated with a fall according to type of fall among the elderly. Osteoporos. Int. 2000, 11, 631–634. [Google Scholar] [CrossRef] [PubMed]
- Robinovitch, S.N.; Feldman, F.; Yang, Y.; Schonnop, R.; Leung, P.M.; Sarraf, T.; Sims-Gould, J.; Loughin, M. Video capture of the circumstances of falls in elderly people residing in long-term care: An observational study. Lancet 2013, 381, 47–54. [Google Scholar] [CrossRef]
- Feldman, F.; Robinovitch, S.N. Reducing hip fracture risk during sideways falls: Evidence in young adults of the protective effects of impact to the hands and stepping. J. Biomech. 2007, 40, 2612–2618. [Google Scholar] [CrossRef] [PubMed]
- Sabick, M.; Hay, J.; Goel, V.; Banks, S. Active responses decrease impact forces at the hip and shoulder in falls to the side. J. Biomech. 1999, 32, 993–998. [Google Scholar] [CrossRef] [PubMed]
- Pavol, M.J.; Owings, T.M.; Foley, K.T.; Grabiner, M.D. Mechanisms leading to a fall from an induced trip in healthy older adults. J. Gerontol. Ser. A Biol. Sci. Med Sci. 2001, 56, M428–M437. [Google Scholar] [CrossRef] [PubMed]
- Lo, J.; Ashton-Miller, J. Effect of pre-impact movement strategies on the impact forces resulting from a lateral fall. J. Biomech. 2008, 41, 1969–1977. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Grabiner, M.D.; Koh, T.J.; Lundin, T.M.; Jahnigen, D.W. Kinematics of recovery from a stumble. J. Gerontol. 1993, 48, M97–M102. [Google Scholar] [CrossRef]
- Burkhart, T.A.; Clarke, D.; Andrews, D.M. Reliability of impact forces, hip angles and velocities during simulated forward falls using a novel Propelled Upper Limb fall ARrest Impact System (PULARIS). J. Biomech. Eng. 2012, 134, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Abdolshah, S.; Rajaei, N.; Akiyama, Y.; Yamada, Y.; Okamoto, S. Longitudinal rollover strategy as effective intervention to reduce wrist injuries during forward fall. IEEE Robot. Autom. Lett. 2018, 3, 4187–4192. [Google Scholar] [CrossRef]
- Abdolshah, S.; Rajaei, N.; Akiyama, Y.; Yamada, Y.; Okamoto, S. Investigation into hand impact force during forward falls on uneven terrain. Int. J. Precis. Eng. Manuf. 2020, 21, 509–517. [Google Scholar] [CrossRef]
- Lattimer, L.J.; Lanovaz, J.L.; Farthing, J.P.; Madill, S.; Kim, S.Y.; Robinovitch, S.; Arnold, C.M. Biomechanical and physiological age differences in a simulated forward fall on outstretched hands in women. Clin. Biomech. 2018, 52, 102–108. [Google Scholar] [CrossRef] [PubMed]
- Akiyama, Y.; Mitsuoka, K.; Okamoto, S.; Yamada, Y. Experimental analysis of the fall mitigation motion caused by tripping based on the motion observation until shortly before ground contact. J. Biomech. Sci. Eng. 2019, 14, 18–00510. [Google Scholar] [CrossRef]
- Grzelczyk, D.; Biesiacki, P.; Mrozowski, J.; Awrejcewicz, J. Dynamic simulation of a novel “broomstick” human forward fall model and finite element analysis of the radius under the impact force during fall. J. Theor. Appl. Mech. 2018, 56, 239–253. [Google Scholar] [CrossRef][Green Version]
- Abdolshah, S.; Akiyama, Y.; Mitsuoka, K.; Yamada, Y.; Okamoto, S. Analysis of upper extremity motion during trip-induced falls. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28–31 August 2017; pp. 1485–1490. [Google Scholar]
- Klemetti, R.; Moilanen, P.; Avela, J.; Timonen, J. Effects of gait speed on stability of walking revealed by simulated response to tripping perturbation. Gait Posture 2014, 39, 534–539. [Google Scholar] [CrossRef]
- Sugihara, T.; Nakamura, Y.; Inoue, H. Real-time humanoid motion generation through ZMP manipulation based on inverted pendulum control. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 2, pp. 1404–1409. [Google Scholar]
- Troy, K.L.; Grabiner, M.D. Asymmetrical ground impact of the hands after a trip-induced fall: Experimental kinematics and kinetics. Clin. Biomech. 2007, 22, 1088–1095. [Google Scholar] [CrossRef] [PubMed]
- Roos, P.E.; McGuigan, M.P.; Trewartha, G. The role of strategy selection, limb force capacity and limb positioning in successful trip recovery. Clin. Biomech. 2010, 25, 873–878. [Google Scholar] [CrossRef] [PubMed]
- Zatsiorsky, V. The mass and inertia characteristics of the main segments of the human body. Biomechanics 1983, 1152–1159. [Google Scholar]
- De Leva, P. Adjustments to Zatsiorsky-Seluyanov’s segment inertia parameters. J. Biomech. 1996, 29, 1223–1230. [Google Scholar] [CrossRef]
- Thelen, D.G.; Schultz, A.B.; Alexander, N.B.; Ashton-Miller, J.A. Effects of age on rapid ankle torque development. J. Gerontol. Ser. A Biol. Sci. Med Sci. 1996, 51, M226–M232. [Google Scholar] [CrossRef]
- Sale, D.; Quinlan, J.; Marsh, E.; McComas, A.; Belanger, A. Influence of joint position on ankle plantarflexion in humans. J. Appl. Physiol. 1982, 52, 1636–1642. [Google Scholar]
- Marsh, E.; Sale, D.; McComas, A.; Quinlan, J. Influence of joint position on ankle dorsiflexion in humans. J. Appl. Physiol. 1981, 51, 160–167. [Google Scholar] [CrossRef]
- Simoneau, E.; Martin, A.; Van Hoecke, J. Muscular performances at the ankle joint in young and elderly men. J. Gerontol. Ser. A Biol. Sci. Med. Sci. 2005, 60, 439–447. [Google Scholar] [CrossRef]
- Bento, P.C.B.; Pereira, G.; Ugrinowitsch, C.; Rodacki, A.L.F. Peak torque and rate of torque development in elderly with and without fall history. Clin. Biomech. 2010, 25, 450–454. [Google Scholar] [CrossRef]
- Harbo, T.; Andersen, H.; Jakobsen, J. Length-dependent weakness and electrophysiological signs of secondary axonal loss in chronic inflammatory demyelinating polyradiculoneuropathy. Muscle Nerve 2008, 38, 1036–1045. [Google Scholar] [CrossRef] [PubMed]
- Harbo, T.; Brincks, J.; Andersen, H. Maximal isokinetic and isometric muscle strength of major muscle groups related to age, body mass, height, and sex in 178 healthy subjects. Eur. J. Appl. Physiol. 2012, 112, 267–275. [Google Scholar] [CrossRef]
- Abdolshah, S.; Rajaei, N.; Akiyama, Y.; Yamada, Y.; Okamoto, S. Safety considerations for forward falls. J. Musculoskelet. Neuronal Interact. 2020, 20, 176. [Google Scholar] [PubMed]
- Chiu, J.; Robinovitch, S.N. Prediction of upper extremity impact forces during falls on the outstretched hand. J. Biomech. 1998, 31, 1169–1176. [Google Scholar] [CrossRef] [PubMed]
- Pijnappels, M.; Bobbert, M.F.; van Dieën, J.H. Push-off reactions in recovery after tripping discriminate young subjects, older non-fallers and older fallers. Gait Posture 2005, 21, 388–394. [Google Scholar] [CrossRef] [PubMed]
- Pijnappels, M.; Reeves, N.D.; Maganaris, C.N.; Van Dieen, J.H. Tripping without falling; lower limb strength, a limitation for balance recovery and a target for training in the elderly. J. Electromyogr. Kinesiol. 2008, 18, 188–196. [Google Scholar] [CrossRef]
- Kawalilak, C.; Lanovaz, J.; Johnston, J.; Kontulainen, S. Linearity and sex-specificity of impact force prediction during a fall onto the outstretched hand using a single-damper-model. J. Musculoskelet. Neuronal Interact. 2014, 14, 286–293. [Google Scholar]
- DeGoede, K.; Ashton-Miller, J. Fall arrest strategy affects peak hand impact force in a forward fall. J. Biomech. 2002, 35, 843–848. [Google Scholar] [CrossRef]
- Groen, B.E.; Weerdesteyn, V.; Duysens, J. Martial arts fall techniques decrease the impact forces at the hip during sideways falling. J. Biomech. 2007, 40, 458–462. [Google Scholar] [CrossRef] [PubMed]
- Caplan, B.; Bogner, J.; Brenner, L.; Yang, Y.; Mackey, D.C.; Liu-Ambrose, T.; Leung, P.M.; Feldman, F.; Robinovitch, S.N. Clinical risk factors for head impact during falls in older adults: A prospective cohort study in long-term care. J. Head Trauma Rehabil. 2017, 32, 168–177. [Google Scholar]
- Yang, Y.; Komisar, V.; Shishov, N.; Lo, B.; Korall, A.M.; Feldman, F.; Robinovitch, S.N. The effect of fall biomechanics on risk for hip fracture in older adults: A cohort study of video-captured falls in long-term care. J. Bone Miner. Res. 2020, 35, 1914–1922. [Google Scholar] [CrossRef] [PubMed]
- Robinovitch, S.N.; Hayes, W.C.; McMahon, T.A. Distribution of contact force during impact to the hip. Ann. Biomed. Eng. 1997, 25, 499–508. [Google Scholar] [CrossRef]
- Van der Zijden, A.; Groen, B.; Tanck, E.; Nienhuis, B.; Verdonschot, N.; Weerdesteyn, V. Can martial arts techniques reduce fall severity? An in vivo study of femoral loading configurations in sideways falls. J. Biomech. 2012, 45, 1650–1655. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Segment | Mass | Length | Mass Center Position [%] | Inertia [kg·cm2] |
|---|---|---|---|---|
| 1.43 M + 1.73 H − 112 | ||||
| Head and Neck | 0.069 M | 0.140 H | 59.8 (from top) | 1.17 M + 1.52 H − 78 |
| 1.72 M + 0.08 H + 61.6 | ||||
| 18.30 M − 5.73 H + 367 | ||||
| Trunk | 0.160 M | 0.139 H | 50.7 (from neck) | 36.03 M − 9.98 H + 561 |
| 36.73 M − 5.97 H + 81.2 | ||||
| 26.70 M − 8.00 H + 263 | ||||
| Abdomen | 0.163 M | 0.124 H | 45.0 (from trunk) | 43.14 M − 19.80 H + 1501 |
| 39.80 M − 12.87 H + 618.5 | ||||
| 11.80 M + 3.44 H − 934 | ||||
| Pelvis | 0.112 M | 0.084 H | 61.1 (from abdomen) | 14.70 M + 1.69 H − 775 |
| 12.00 M + 7.74 H − 1568 | ||||
| 1.53 M + 1.34 H − 232 | ||||
| Upper arm | 0.027 M | 0.162 H | 57.7 (from shoulder) | 1.56 M + 1.51 H − 250.7 |
| 0.55 M + 0.04 H − 16.9 | ||||
| 0.86 M + 0.38 H − 67.9 | ||||
| Forearm | 0.016 M | 0.154 H | 45.7 (from elbow) | 0.95 M + 0.34 H − 64 |
| 0.31 M + 0.09 H + 5.66 | ||||
| 0.08 M + 0.03 H − 6.26 | ||||
| Hand | 0.006 M | 0.050 H | 79.0 (from wrist) | 0.09 M + 0.09 H − 13.68 |
| 0.17 M + 0.12 H − 19.5 | ||||
| 32.02 M + 19.24 H − 3690 | ||||
| Thigh | 0.142 M | 0.243 H | 41.0 (from hip) | 31.70 M + 18.61 H − 3557 |
| 11.30 M − 2.28 H − 13.5 | ||||
| 4.59 M + 6.82 H − 1152 | ||||
| Shank | 0.043 M | 0.249 H | 44.6 (from knee) | 4.59 M + 6.63 H − 1105 |
| 1.13 M + 0.30 H − 70.5 | ||||
| 0.41 M + 0.61 H − 97.09 | ||||
| Foot | 0.013 M | 0.148 H | 44.2 (from heel) | 0.14 M + 0.09 H − 15.48 |
| 0.48 M + 0.63 H − 100 |
| Gain | Max Torque [Nm] | Max Torque Change Rate [Nm/10 ms] | ||||
|---|---|---|---|---|---|---|
| Kp/Kd | Direction | Young (20 s) | Elderly (70 s) | Young (20 s) | Elderly (70 s) | |
| Ankle | 200/1.5 | Dorsal flexion | 45 | 35 | 3.0 | 2.0 |
| Planter flexion | 150 | 100 | 10 | 7.0 | ||
| Knee | 200/1.5 | Flexion | 0 | 0 | 13 | 8.0 |
| Extension | 260 | 180 | 13 | 8.0 | ||
| Hip | 100/1.5 | Flexion | 0 | 0 | 7.5 | 4.5 |
| Extension | 150 | 100 | 7.5 | 4.5 | ||
| Lumbar | 150/1.5 | Backward | 0 | 0 | 15 | 8.9 |
| Forward | 300 | 200 | 15 | 8.9 | ||
| Long-Step Case | Short-Step Case | p-Value | |
|---|---|---|---|
| Initial height [m] | 0.75 ± 0.039 | 0.76 ± 0.034 | 0.296 |
| Initial descent velocity [m/s] | −1.0 ± 0.23 | −1.1 ± 0.33 | 0.196 |
| Contact Part | Free Fall | Elderly | Young | |
|---|---|---|---|---|
| Hand | Support side | 16 | 15 | 16 |
| Swing side | 24 | 26 | 24 | |
| Knee | Support side | 8 | 7 | 8 |
| Swing side | 1 | 1 | 1 | |
| Total | 49 | 49 | 49 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akiyama, Y.; Yamada, S.; Okamoto, S.; Yamada, Y. Investigation of the Effect of Physical Ability on the Fall Mitigation Motion Using the Combination of Experiment and Simulation. Appl. Sci. 2024, 14, 3051. https://doi.org/10.3390/app14073051
Akiyama Y, Yamada S, Okamoto S, Yamada Y. Investigation of the Effect of Physical Ability on the Fall Mitigation Motion Using the Combination of Experiment and Simulation. Applied Sciences. 2024; 14(7):3051. https://doi.org/10.3390/app14073051
Chicago/Turabian StyleAkiyama, Yasuhiro, Shuto Yamada, Shogo Okamoto, and Yoji Yamada. 2024. "Investigation of the Effect of Physical Ability on the Fall Mitigation Motion Using the Combination of Experiment and Simulation" Applied Sciences 14, no. 7: 3051. https://doi.org/10.3390/app14073051
APA StyleAkiyama, Y., Yamada, S., Okamoto, S., & Yamada, Y. (2024). Investigation of the Effect of Physical Ability on the Fall Mitigation Motion Using the Combination of Experiment and Simulation. Applied Sciences, 14(7), 3051. https://doi.org/10.3390/app14073051