Abstract
Unmanned aerial vehicles (UAVs) have been employed to perform aerial surveys in many industries owing to their versatility, relatively low cost, and efficiency. Ground control points (GCPs) are used for georeferencing to ensure orthophoto geolocation/positioning accuracy. In this study, we investigate the impact of the number and distribution of GCPs on the accuracy of orthophoto production based on images acquired by UAVs. A test site was selected based on regulatory requirements, and several scenarios were developed considering the specifications of the UAVs used in this study. The locations of GCPs were varied to obtain the results. Based on the results obtained for different numbers of GCPs per unit area and distribution of GCPs, it is shown that UAV-based platforms can be more extensively utilized in a range of applications. The findings of this study will significantly impact the development process of GCP automation algorithms and enable a more cost-effective approach when determining target sites for UAV-based orthophoto production.
1. Introduction
In recent years, the development of various types of unmanned aerial vehicles (UAVs) has led to the active use of UAV-based platforms or systems across various industrial sectors. In particular, there has been a significantly increased interest in the use of UAVs to acquire low-altitude images [1,2]. UAV-based aerial photogrammetry has emerged as a relatively low-cost alternative to the traditional manned aerial photogrammetry, enabling fast and efficient data acquisition and processing for surveying, even for locations that are difficult for humans to access or over large areas.
The versatility and advantages of UAV platforms have attracted continuous research interest owing to their potential in a wide range of applications [3]. The use of UAVs provides a rapid, cost-effective, and efficient method for the generation of high-resolution datasets, including digital elevation models (DEMs) and orthophotos [4,5].
When creating DEMs or producing orthophotos based on UAVs, images and altitude data should be properly aligned with the Earth’s surface to obtain accurate positioning information. This is essential for ensuring accuracy in mapping, geospatial analysis, and integration of UAV data with data from other geomatic systems [6]. When used properly, UAV-based systems enable the production of orthophotos and DEMs with a sufficient level of accuracy and quality; however, the quality of these resulting models or photos largely depends on how the mission and surveys are optimally performed to achieve the highest possible accuracy under given settings [7]. For applications including surveying or mapping, the acquisition of geospatial information with minimal error is essential to obtaining accurate measurements. A high positional accuracy ensures the reliability of information about distances, areas, and volumes calculated from the data acquired with UAVs, which is useful in a variety of applications including construction, agriculture, and environmental monitoring.
To achieve a practical degree of positional accuracy for orthophotos produced based on the structure from motion (SFM) algorithm by acquiring aerial photos, an appropriate georeferencing strategy needs to be adopted [8]. This step is critical to ensuring the accuracy of these images for various purposes including mapping, surveying, and environmental monitoring. Accurate georeferencing allows the reliable comparison of heterogeneous datasets acquired at different times. It also plays an important role in monitoring changes over time, including the tracking of vegetation growth, evaluation of land use changes, and detection of changes in surface topography.
In the UAV-based image mapping stage, ground control points (GCPs) are usually used for georeferencing to ensure orthophoto geolocation/positioning accuracy [9]. A GCP is an artificial or natural point on the Earth’s surface with defined coordinates. This refers to the point of observation by installing a target signboard for aerial surveying on the ground for geometric correction of the acquired photo. In some cases, other objects such as crosswalk signs, manholes, or braille blocks are used instead of installing target signboards. To use something other than the target signboards as a GCP, requirements that must be considered consist of the following: first, the location of the pixels, enabling the clear identification of a point; second, locations with a clear difference in brightness; and third, points invariant to the time at which photos are taken and changes in time. After determining the GCPs, devices used for stereo matching, such as a global positioning system (GPS), are used to obtain values of the stereo corresponding with the applicable points [10].
Without GCPs, orthophotos are at risk of experiencing distortions and errors from factors such as GPS inaccuracy, sensor drift, and topographic changes. GCPs help to minimize these errors and improve the overall quality of orthophotos. If orthophotos or DEMs are produced in units of cities of districts without GCPs or other control points, significant geolocation errors may occur. In order to minimize such errors, an analysis from a previous study [11] reported that GCPs could be installed to guarantee a certain degree of precision and reduce the error rate. In summary, GCPs play an important role in ensuring the accuracy, precision, and reliability of orthophotos produced with UAV-based platforms, providing the necessary references for georeferencing and contributing to the overall quality of mapping or surveying results.
With a growing demand for accurate and up-to-date geospatial information/data, there is a clear need to establish a standardized methodology for UAV-based orthophoto production. An important challenge is to identify the ideal density, spatial distribution, and optimal number of GCPs considering changes in topography, land cover, and characteristics of the UAV used and the target site. Georeferencing involves assigning real-world coordinates to digital data (usually images or maps). A GCP functions as a key player in this process by providing a known reference location. The geolocation of GCPs is measured using surveying techniques that provide accurate and known coordinates for a specific point on the Earth’s surface. Commonly used methods include real-time kinematic (RTK) GPS, high-precision global navigation satellite system (GNSS) receivers, and terrestrial light detection and ranging (LiDAR) [12]. Among these methods, RTK GPS is often considered one of the most reliable methods for achieving high positioning accuracy. RTK GPS uses satellite signals for the real-time determination of the exact location of a GPS receiver. By using a base station with known coordinates to transmit corrected data to the rover (GPS receiver of a GCP), centimeter-level resolution/accuracy can be achieved.
The absence of clear guidelines in general regulations/specifications about measuring geolocations of GCPs for georeferencing may result in suboptimal georeferencing, affecting the overall quality of the resulting orthophoto.
According to the current version of the Guideline for Public Survey Using Unmanned Aerial Vehicles in Korea, the requirements for the installation of the target signboard for aerial surveying and the number of GCPs are set as nine points per km2 in principle. However, it can be verified that a larger than necessary number of GCPs against the size of the target site or inefficient placement of GCPs would result in wasted time and manpower. Therefore, in this study, we aim to achieve improved accuracy by adjusting the number and placement of GCPs to increase their process efficiency and speed. However, considering the previous studies conducted to date, although there has been a range of comparative evaluations or analyses on the impact of having no GCPs or GCPs on the X and Y coordinates, few studies have investigated the impact of the number and distribution of GCPs on the accuracy of the resulting orthophoto. Therefore, considering the potential for utilization in practical applications, more in-depth research is needed on the impact of the number and distribution of GCPs.
Against this backdrop, in this study, we aim to analyze the impact of the number and distribution of GCPs on the accuracy of orthophoto production based on images acquired by UAVs, to understand the impact on the quality of the survey results. In addition, based on the results, we propose the optimal number per unit area and distribution of GCPs. If the findings of this study can contribute to an improved accuracy in UAV-based photogrammetry, it is expected that UAV-based platforms can be more extensively utilized in a range of applications such as process control at construction sites or facility inspection, as well as surveying, building status surveys, and investigations of unauthorized buildings.
2. Related Work
Unmanned aerial photogrammetry with UAV-based systems is a relatively low-cost method compared to traditional manned aerial photogrammetry and is capable of fast and efficient data acquisition and processing for surveying, even for places for which human access is difficult or over large areas. The distinctive advantages of UAV platforms have attracted continuous research interest such as producing orthophotos with UAV imagery over a wide range of applications. An orthophoto refers to an image from which image displacement caused by terrain relief and camera orientation at the time of taking the image has been removed. Upon the process of correction, an image is expressed as a vertically looking-down image. Orthophotography can be utilized for the inspection of buildings/facilities, analysis of land cover/land use, etc., and the anticipated effects include cost saving from reducing the number of field surveys to the facilitation of visual and geospatial analyses in construction projects such as in the case of urban planning.
According to previous research, orthophoto production in units of cities or districts without GCPs often generates many errors. The installation of GCPs helps to guarantee a certain degree of precision and minimize the occurrence of errors. Furthermore, the efficient placement of GCPs against the entire area of the target site, which plays a key role in orthophoto production, is expected to reduce the time involved and increase cost-effectiveness.
In Korea, according to the current version of the Guideline for Public Survey Using Unmanned Aerial Vehicles, the requirements on the installation of the target signboards for aerial surveying and the number of GCPs are set as nine points per km2 in principle. The placement or arrangement of GCPs is also described in the provision in the Guidelines, but in this study, we aim to achieve efficiency in obtaining the results with high accuracy using a small number of GCPs by modifying the number and distribution of GCPs specified in the Guidelines. Considering the previous studies to date [13,14], although there have been comparative evaluations or analyses on the impact of having no GCPs or GCPs on the RMSE values of X, Y, and Z coordinates, few studies have investigated the impact of the number and distribution of GCPs on the accuracy of the resulting orthophoto. Therefore, to facilitate active utilization in practical applications, more in-depth research is needed on the impact of the number and distribution of GCPs.
Thus, in this study, we aim to analyze the impact of the number and distribution of GCPs on the accuracy of UAV-based orthophoto production, ultimately explaining the impact on the quality of the survey results. In addition, based on the results obtained, we propose the optimal number per unit area and the optimal distribution of GCPs. Realizing an increased accuracy in UAV-based photogrammetry will enable UAV-based platforms to be more extensively utilized in diverse applications such as process control at construction sites or during facility inspection, surveying, building status surveys, and investigations of unauthorized buildings.
First, for a brief overview of previous studies related to GCPs in UAV photogrammetry, Lee et al. [15] reported the installation of nine GCPs at points per 1 km2 in accordance with the regulations of Korea. Yoo et al. [16] installed three GCPs in the test site of approximately 0.2 km2, and the orthophoto and DSM results were within the margin of error. Kim et al. [17] proposed a method of automatically creating a building model using a UAV-based point cloud and reported that the method can be applied not only to update two-dimensional (2D) data such as digital maps, but also for the three-dimensional (3D) modeling of buildings based on 2D data.
Benassi F. et al. [18] conducted experiments using eBee-RTK (SenseFly), which is a survey-grade fixed-wing drone, and installed 12 GCPs in the test site over an area of about 0.2 km2. The number density of GCPs was about 5.4 times higher than that of GCPs in Korea. In [19], the authors used Phantom 4 Pro, which is a fixed-wing drone, and by conducting tests with varying numbers of GCPs from 4 to 24, a trend of a decreasing error rate with an increasing number of GCPs was confirmed. In [20], the authors conducted a survey without using GCPs, and their results showed that the error of the Z-axis coordinate value was larger than other values. In [21], a rotary-wing drone was used and the number of GCPs was 9, 19, and 33, while the RMSE values of the X, Y, and Z coordinates were compared. In addition, analyses of how different physical properties of GCPs affect the identification of GCPs from orthophotos [22] helped to improve the understanding of the actual impact of GCPs; the results confirmed that the color, material, size, and shape of GCPs can affect their accurate identification in orthophotos [23].
The study by James et al. [24] analyzed the effects of the number and distribution of GCPs, as well as bundle adjustment, on the accuracy of SfM-based UAV surveys. This study showed that while increasing the number of GCPs improves accuracy, the improvement effect becomes insignificant above a certain level. Additionally, it confirmed that the spatial distribution of GCPs can greatly influence accuracy, and the bundle adjustment process also contributes to improving accuracy.
In the study by Stott et al. [25], they used an RTK-GNSS UAV and SfM techniques to perform large-scale topographic mapping and proposed a GCP distribution strategy for this purpose. They experimentally analyzed the influence of GCP number and placement on terrain accuracy. The study found that an even the distribution of GCPs plays a crucial role in improving accuracy. In particular, a GCP arrangement spanning the entire area was shown to be important.
Synthesizing the findings from these prior studies, optimizing both the number and spatial distribution of GCPs is critical for maximizing the accuracy of UAV-based orthophotos and terrain models. It is efficient to devise a placement strategy that can satisfy the required accuracy with a minimum number of GCPs, considering the scale and terrain characteristics of the target area.
Based on these previous studies on GCPs, we can see that GCPs play an important role in improving geolocation/positioning accuracy in various applications of mapping and surveying, especially in applications related to aerial or satellite imagery. Furthermore, to achieve a high degree of positioning/geolocation accuracy when building geospatial datasets of a specific target site, it is believed that by adjusting the number and distribution of GCPs, the desired level of accuracy can be achieved when a minimum number of GCPs is installed relative to the area of the target site.
3. Methodology
3.1. Overview of Test Sites and UAVs
From the regulations related to aerial photogrammetry with UAV, the workflow is the following: 1. Establishment of a plan/process; 2. Installation of target signboards for aerial surveying and surveying of GCPs; 3. Unmanned aerial photography; 4. Aerial triangulation; 5. Creation of a digital surface model (DSM), etc.; 6. Orthophoto production; 7. Description of topography (with topographical features); 8. Production of a digital topographic map; and 9. Quality control and evaluation/summary. In this study, the values of the geolocation RMSE of an orthophoto were analyzed through the workflow, up to No. 6.
Considering the current regulatory requirements and applying the required standards to the target area of this study, because the study site was a flat, low-lying area, the appropriate percentages of overlap (65%) and sidelap (60%) were determined for performing unmanned photogrammetry with UAVs. In addition, the modeling and analysis results indicated that the values of the root mean square error (RMSE) needed to be within ±0.5 based on the map scale of 1/500 to 1/600.
With respect to the selection of a study site, the “ultralight vehicle flight areas” as prescribed by the relevant regulations were considered as the top priority. In addition, an area of at least 500 m × 500 m needed to be be secured, and the site could not have restrictions on the installation of GCPs. Considering these considerations, an area in Gyeongsan-si, Gyeongsangbuk-do Province, in Korea, was selected, as depicted in Figure 1 for conducting the activities of UAV photogrammetry and research, and the area of the study site was approximately 1,000,000 m2 (~1 km2). The specifications of the UAV used in the experiments of this study are presented in Table 1.

Table 1.
Specifications of the UAV used in this study.
3.2. Establishment of Experimental Scenarios
The experiment involves planning for aerial photography with the UAV, the actual photography, alignment of photos, and geospatial data construction. In this study, Phantom 4 RTK (DJI), which is a rotary-wing drone, was used, and the study site was the area around Hayang-eup. The settings for the aerial photography with the drone were the following: average altitude of 100 m, flight speed of 7.9 m/s, camera angle of −90° (vertical), horizontal overlap of 65%, and vertical overlap of 60%. In addition, the area of the drone-mapping zone was approximately 650,000 m2, with a flight time of approximately 40 min. A total of 473 photos were acquired. After completion of the photography process, VRS-RTK was used to measure the geolocation for four GCPs and five checkpoints (CPs) within the study site, as shown in Figure 1. Based on the image data acquired through the UAV photography, scenarios for experimental analysis were developed. Based on the four GCPs installed, Scenarios 1 to 5 were created with different numbers of GCPs, including the case without any GCP. For scenarios with multiple GCPs, the total number of all possible cases that could be created by varying the GCP placement could be obtained using the following: ;. Therefore, the final number of models was 16, and PIX4D Mapper v4.5.6 (professional photogrammetry software) was used for modeling to generate an orthophoto; the RMSE values were analyzed through the derived data.
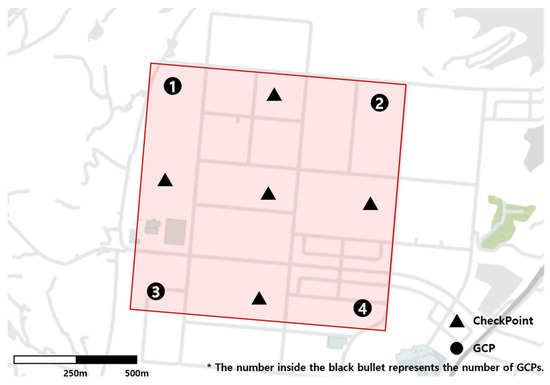
Figure 1.
Locations of GCPs number and CPs.
Figure 1.
Locations of GCPs number and CPs.

3.3. Development of Scenarios
Scenarios were developed for experimental analysis based on the data acquired from the aerial photography in the previous stage. The locations of the GCPs and CPs within the study site are shown in Figure 2.
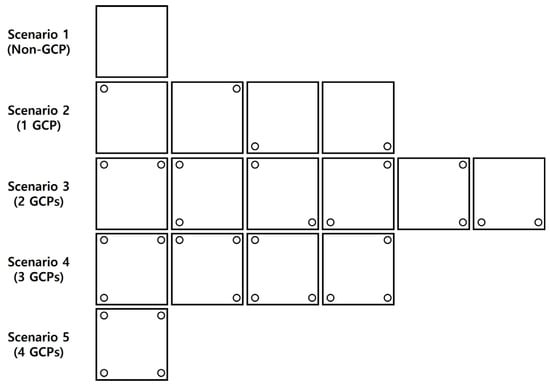
Figure 2.
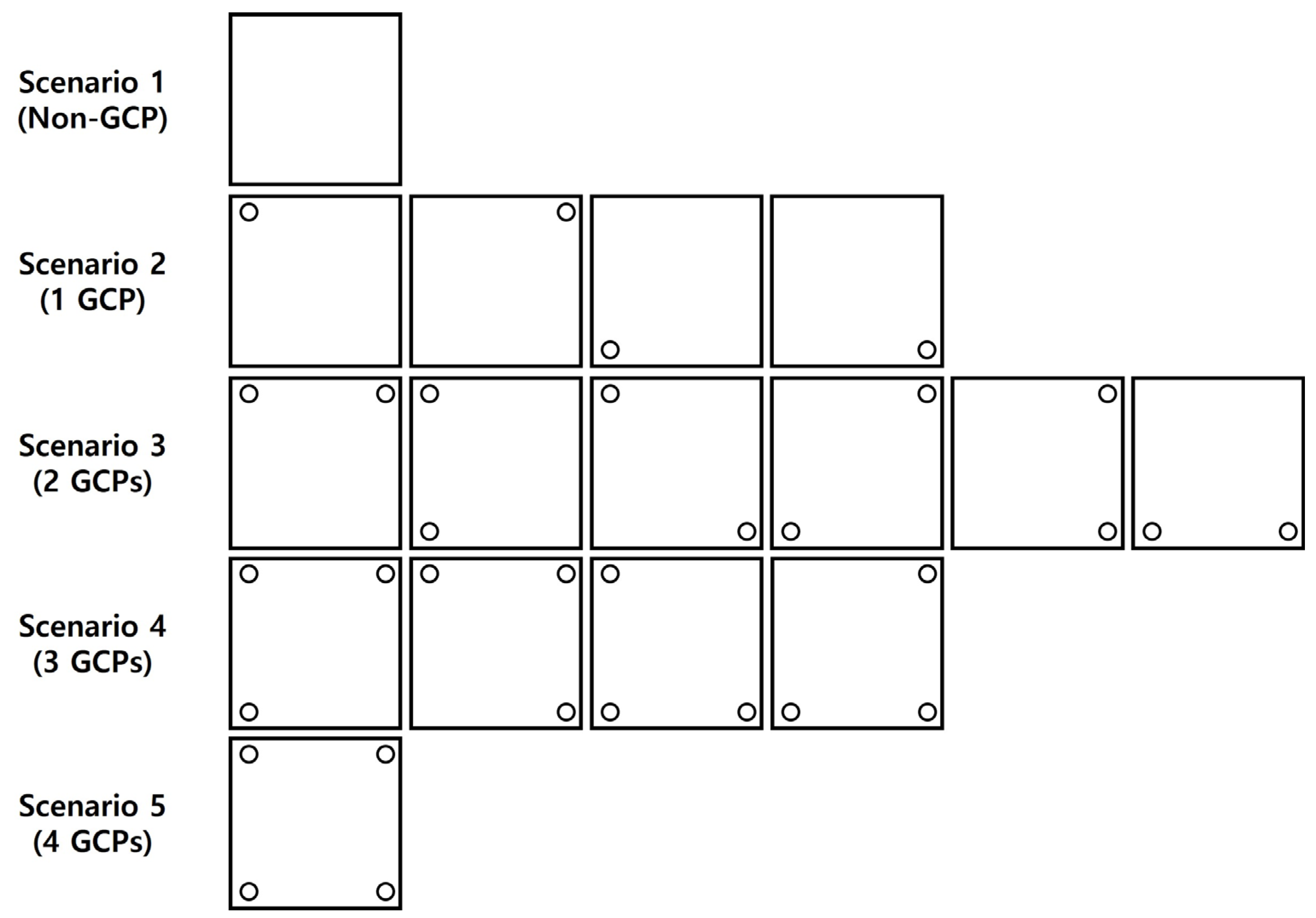
Different numbers and distributions of GCPs for each scenario.
Based on the image data acquired through the drone photography, the scenarios required for experimental analysis were developed. Based on the four GCPs that were installed, Scenarios 1 to 5 were set as shown in Table 2 by varying the number of selected GCPs in each scenario. Additional scenarios were created by changing the placement of GCPs included in each scenario. The number of all possible cases that could be generated was ; a total of 16 cases were generated, as shown in Table 3. Therefore, the final number of models is 16.
Table 2.
GCP locations for Scenarios 1–5.
Table 3.
RMSE values calculated for each scenario in the study site.
Based on the formulated scenarios, the selected GCPs were placed as shown in Figure 2 and modeling was performed with PIX4D Mapper. An orthophoto was created, the resulting values for the geolocation of GCPs were produced, and the data were analyzed.
4. Analysis of Experimental Data
4.1. Analysis of Modeling Results
Modeling was performed according to the steps of the process, as shown in Figure 3. First, the images were aligned by analyzing the position of the camera for each image, and after entering the measured GCPs for geometric correction, the Align Photos step was performed to extract tie points from the overlapping area in the image. In the Build Dense Point Cloud step, depth information was calculated from individual images based on the point cloud model built during the Align Photos step to create a denser point cloud model. In the Build Mesh step, a polygon mesh model was created using the mesh-building process based on the dense point cloud model. Finally, in the Build Texture step, which was a step that involved creating texture based on the original image and mapping the texture to the polygon mesh model, a 2D orthophoto was produced.

Figure 3.
Process of 3D modeling for the study site.
4.2. Analysis and Validation of Orthoimage RMSE
Based on the images acquired from the Phantom4 RTK camera, an orthophoto was produced with PIX4D Mapper. As shown in the first step of Figure 3, an orthophoto was built using the method of a point cloud model. First, the images were aligned by analyzing the position of the camera for each image, and after entering the measured GCPs for geometric correction, the Align Photos step was performed to extract tie points from the overlapping area in the image.
Through the Build Dense Point Cloud step, depth information was calculated from individual images based on the point cloud model built in the Align Photos step, to create a denser point cloud model as can be seen in the second step of Figure 3.
Next, through the Build Mesh step, a polygon mesh model was created through the mesh-building process based on the dense point cloud model. Finally, through the Build Texture step, a step involving creating texture based on the original image and mapping the texture to the polygon mesh model, a 2D orthophoto was produced, as shown in the last step in Figure 4.

Figure 4.
Orthophoto of the study site created using UAV data.
Based on the image data taken with the UAV from an altitude of 100 m, which was an altitude expected to be commonly used in the field, the product acquired using Pix4D Mapper was analyzed. Figure 4 shows the orthophoto produced from the acquired data.
To evaluate the accuracy of the image data captured, the RMSE value, which was the standard metric for the evaluation of accuracy for each of the 16 scenarios developed based on the four GCPs, was calculated using software. The results derived through this process are presented in Table 3.
In Scenario 1, the X- and Y-coordinate values of the RMSE were the following: (RMSE X, RMSE Y) = (0.161024 m, 0.120645 m); for Scenario 2, (RMSE X, RMSE Y) = (0.076477 m, 0.092455 m); for Scenario 3, (RMSE X, RMSE Y) = (0.054049 m, 0.081462 m); for Scenario 4, (RMSE X, RMSE Y) = (0.018381 m, 0.031209 m); and for Scenario 5, (RMSE X, RMSE Y) = (0.008412 m, 0.011855 m).
Figure 5 shows a plot of the analysis results of the RMSE values of the X and Y coordinates for each scenario for images taken at an altitude of 100 m. According to the Aerial Photogrammetry Work Regulations of Korea, which were discussed in a previous study, the margin of error for 2D GCP is specified to be within ±0.05 m based on map scales from 1/500 to 1/600.
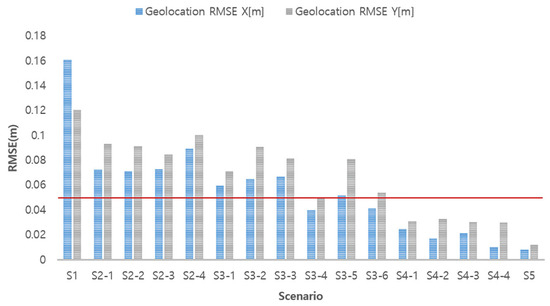
Figure 5.
RMSE by scenario.
To further validate the accuracy of the orthophotos produced in each scenario, an additional analysis was conducted using checkpoints independent from the GCPs. Five checkpoints were separately measured within the study area, in addition to the four GCPs. For each scenario, the coordinates of the checkpoints on the modeled orthophotos were compared with the actual measured coordinates of the checkpoints, and the RMSE values were calculated to evaluate their accuracy. The RMSE values obtained from the checkpoint analysis corroborated the findings derived from the GCP analysis, providing further confidence in the reliability of the results. This additional validation step strengthens the conclusions drawn from the experimental analysis regarding the optimal number and distribution of GCPs required to achieve the desired accuracy for UAV-based orthophoto production in urban areas. Based on this validation, optimizing the number and placement of GCPs can not only improve accuracy but also provide benefits such as reducing field work time, saving labor costs, and increasing overall cost savings.
5. Discussion
In this study, the impact of GCPs on the accuracy of UAV photogrammetry was examined, and the results indicated that at least three GCPs were needed for the optimal improvement in the image accuracy. This finding contrasts with the result reported by Yu et al. [26], who proposed that eight to nine GCPs were required for a similar level of accuracy for a target area of 342 ha. The methodology presented in this study, which focuses on various types of topographic features, proposes a more efficient approach in terms of GCP placement without compromising quality. The results of this study indicate that the new GCP configuration that was tested can significantly improve the efficiency and accuracy in the practice of UAV photogrammetry. This study focused on cost-effective and rapid map production by achieving the desired level of geolocation/positioning accuracy through the installation of a minimal number of GCPs. The GCP installation standards were set based on the Aerial Photogrammetry Work Regulations of Korea. Contrary to the findings obtained from a previous study by Kim and Hong (2020) [27], which emphasized the placement of GCPs over the number of GCPs, our findings indicate that the strategic placement of GCPs can reduce the need for the installation of more GCPs, resulting in the provision of a cost-effective solution for UAV photogrammetry. In addition, the findings of this study underline the importance of the balance between the number of GCPs and their strategic placement, presenting a new perspective on the optimization of photogrammetry projects. In this study, we analyzed the influence of the number and distribution of GCPs on the accuracy of UAV-based orthoimages. The experimental results showed that a minimum of three GCPs could achieve the desired level of accuracy. Future research could further optimize the GCP placement strategy by considering various factors such as terrain and feature characteristics, flight altitude, and overlap ratios. Employing machine learning techniques to automatically explore optimal GCP locations could also be explored.
This finding is consistent with the results of Ozgur Hastaoglu et al. (2022) [28]. In their study, they experimentally analyzed the impact of GCP height differences and geometric distribution on the positional accuracy of UAV point cloud data. They found that larger height differences between GCPs and clustered GCP configurations led to lower positional accuracy of the point cloud data. These results suggest that an appropriate vertical and horizontal distribution of GCPs is crucial for improving accuracy. In our study, we were able to obtain accurate results by evenly distributing GCPs throughout the entire study area. The findings of Ozgur Hastaoglu et al. (2022) provide practical guidelines for establishing an optimal GCP distribution strategy.
However, according to other previous research (James et al., 2017 [24]), accuracy improvement diminishes when the number of GCPs increases beyond a certain level. In our study, the accuracy improvement was not significant when more than four GCPs were used. Therefore, it is important to develop a distribution strategy that achieves the target accuracy with the minimum number of GCPs, considering the size and topographic characteristics of the study area.
In conclusion, by synthesizing the results of our study and several previous studies, it is evident that both the vertical/horizontal distribution and the total number of GCPs influence accuracy. The most efficient approach for producing UAV-based orthoimages would be to establish a distribution strategy that satisfies the accuracy requirements with the minimum number of GCPs, taking into account the characteristics of the study area.
6. Conclusions
In this study, we performed a comparative analysis of the accuracy of orthophoto production with UAVs by setting different scenarios according to the number of GCPs and their distribution. Furthermore, we presented the optimal number and distribution of GCPs in urban areas. The findings of this study can be summarized as follows.
First, through an analysis of previous studies, the margin of error for the geolocation of 2D GCPs based on a map scale from 1/500 to 1/600 was analyzed according to the Aerial Photogrammetry Work Regulations of Korea. For a comparative evaluation of accuracy according to the number and distribution of GCPs, the area around Gyeongsangbuk-do Province in South Korea was selected as the study site, UAV-based aerial photography was performed, and 473 photos were collected as image data. Using the acquired aerial imagery data, 3D modeling was performed for each scenario based on a point cloud model, and an orthophoto was produced.
To meet the margin of error specified in the Aerial Photogrammetry Work Regulations for an area of approximately 1,000,000 m2 and an average altitude of 100 m, the optimal strategy was found to be installing a minimum of three GCPs and distributing them evenly across the entire study area. This configuration allowed the desired accuracy requirements to be satisfied while minimizing the number of GCPs needed. However, it is important to note that the optimal number and spatial arrangement of GCPs may vary depending on the characteristics of the target site, such as its size, terrain complexity, and land cover features.
Regardless of the GCP distribution status, the analyses showed that at least three GCPs would be needed to secure the desired accuracy. The optimal number and distribution of GCPs may vary depending on the nature of the project, characteristics of the target site, and techniques used. However, to establish an optimal strategy that satisfies the goals of individual projects, it is necessary to determine the optimal number of GCPs and develop a strategy for efficient placement.
This study provides important insights into the optimal number and placement strategy of GCPs for UAV-based orthophoto production. Through system validation, we were able to determine the minimum required number of GCPs to maximize the accuracy of orthophotos. Furthermore, the discussion on the generalization capability of the system to various applications demonstrates the potential for widespread applicability of this technology in real-world scenarios.
In conclusion, this study offers practical guidelines for the efficient utilization of GCPs in UAV-based orthophoto production. These findings will prove valuable for both researchers and practitioners in the field. We anticipate that this study will contribute to the advancement of UAV-based surveying and related domains.
Author Contributions
Conceptualization, D.-M.S. and W.-J.N.; methodology, D.-M.S. and H.S.; software, H.-J.W.; validation, D.-M.S. and W.-H.H.; formal analysis, W.-J.N.; investigation, D.-M.S.; resources, H.S.; data curation, W.-H.H. and H.-J.W.; writing—original draft preparation, D.-M.S.; writing—review and editing, W.-J.N.; visualization, D.-M.S.; supervision, W.-J.N. and H.S.; project administration, W.-H.H.; funding acquisition, W.-J.N. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korean government (Ministry of Education) (NRF2020R1I1A3068406).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The original contributions presented in the study are included in the article; further inquiries can be directed to the corresponding author/s.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Wierzbicki, D.; Kedzierski, M.; Fryskowska, A. Assessment of the influence of UAV image quality on the orthophoto production. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 1–8. [Google Scholar] [CrossRef]
- Liu, Y.; Zheng, X.; Ai, G.; Zhang, Y.; Zuo, Y. Generating a high-precision true digital orthophoto map based on UAV images. ISPRS Int. J. Geo-Inf. 2018, 7, 333. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D Mapping Applications: A Review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Rangel, J.M.G.; Gonçalves, G.R.; Pérez, J.A. The impact of number and spatial distribution of GCPs on the positional accuracy of geospatial products derived from low-cost UASs. Int. J. Remote Sens. 2018, 39, 7154–7171. [Google Scholar] [CrossRef]
- Gomes Pessoa, G.; Caceres Carrilho, A.; Takahashi Miyoshi, G.; Amorim, A.; Galo, M. Assessment of UAV-based digital surface model and the effects of quantity and distribution of ground control points. Int. J. Remote Sens. 2021, 42, 65–83. [Google Scholar] [CrossRef]
- Syetiawan, A.; Gularso, H.; Kusnadi, G.I.; Pramudita, G.N. Precise topographic mapping using direct georeferencing in UAV. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2020; Volume 500, p. 012029. [Google Scholar]
- Blistan, P.; Kovanič, Ľ.; Patera, M.; Hurčík, T. Evaluation quality parameters of DEM generated with low-cost UAV photogrammetry and structure-from-motion (SfM) approach for topographic surveying of small areas. Acta Montan. Slovaca 2019, 24, 198–212. [Google Scholar]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of unmanned aerial vehicle (UAV) and SfM photogrammetry survey as a function of the number and location of ground control points used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef]
- Mirko, S.; Eufemia, T.; Alessandro, R.; Giuseppe, F.; Umberto, F. Assessing the impact of the number of GCPS on the accuracy of photogrammetric mapping from UAV imagery. Balt. Surv. 2019, 43, 43–51. [Google Scholar]
- Spyropoulos, A.; Komodakis, N.; Mordohai, P. Learning to detect ground control points for improving the accuracy of stereo matching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1621–1628. [Google Scholar]
- Woo, H.; Baek, S.; Hong, W.; Chung, M.; Kim, H.; Hwang, J. Evaluating ortho-photo production potentials based on UAV real-time geo-referencing points. Spat. Inf. Res. 2018, 26, 639–646. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Seidl, J.; Reindl, T.; Brouček, J. Photogrammetry using UAV-mounted GNSS RTK: Georeferencing strategies without GCPs. Remote Sens. 2021, 13, 1336. [Google Scholar] [CrossRef]
- Yun, B.Y.; Yoon, W.S. A study on the improvement of orthophoto accuracy according to the flight photographing technique and GCP location distance in orthophoto generation using UAV. J. Kor. Soc. Ind. Converg. 2018, 21, 345–354. [Google Scholar]
- Yun, B.Y.; Sung, S.M. Location accuracy of unmanned aerial photogrammetry results according to change of number of ground control points. J. Kor. Assoc. Geogr. Inf. Stud. 2018, 21, 24–33. [Google Scholar]
- Lee, S.U.; Mun, D.Y.; Seong, W.K.; KIM, J.W. Accuracy analysis according to the number of GCP matching. J. Kor. Assoc. Geogr. Inf. Stud. 2018, 21, 127–137. [Google Scholar]
- Yoo, Y.H.; Choi, J.W.; Choi, S.K.; Jung, S.H. Quality evaluation of orthoimage and DSM based on fixed-wing UAV corresponding to overlap and GCPs. J. Kor. Soc. Geospat. Inf. Sci. 2016, 24, 3–9. [Google Scholar]
- Kim, H.G.; Hwang, Y.; Rhee, S. Automatic building modeling method using planar analysis of point clouds from unmanned aerial vehicles. Kor. J. Remote Sens. 2019, 35, 973–985. [Google Scholar]
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; Morra di Cella, U.; Roncella, R.; Santise, M. Testing accuracy and repeatability of UAV blocks oriented with GNSS-supported aerial triangulation. Remote Sens. 2017, 9, 172. [Google Scholar] [CrossRef]
- Villanueva, J.K.S.; Blanco, A.C. Optimization of ground control point (GCP) configuration for unmanned aerial vehicle (UAV) survey using structure from motion (SFM). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 167–174. [Google Scholar] [CrossRef]
- Tsai, M.L.; Chu, C.H. The performance analysis of a UAV borne direct georeferenced photogrammetric platform in GCP free applications. In Proceedings of the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 1947–1964. [Google Scholar]
- Tahar, K.N.; Ahmad, A.; Akib, W.A.A.W.M.; Mohd, W.M.N.W. Assessment on ground control points in unmanned aerial system image processing for slope mapping studies. Int. J. Sci. Eng. Res. 2012, 3, 1–10. [Google Scholar]
- Hruška, J.; Pádua, L.; Adão, T.; Peres, E.; Martinho, J.; Sousa, J.J. Target influence on ground control points (GCPs) identification in aerial images. In Proceedings of the IGARSS 2020-2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 6487–6490. [Google Scholar]
- Tahar, K.N. An evaluation on different number of ground control points in unmanned aerial vehicle photogrammetric block. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 93–98. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Stott, E.; Williams, R.D.; Hoey, T.B. Ground control point distribution for accurate kilometre-scale topographic mapping using an RTK-GNSS unmanned aerial vehicle and SfM photogrammetry. Drones 2020, 4, 55. [Google Scholar] [CrossRef]
- Yu, J.J.; Kim, D.W.; Lee, E.J.; Son, S.W. Determining the optimal number of ground control points for varying study sites through accuracy evaluation of unmanned aerial system-based 3D point clouds and digital surface models. Drones 2020, 4, 49. [Google Scholar] [CrossRef]
- Kim, J.S.; Hong, I.Y. Accuracy Analysis of Photogrammetry Based on the Layout of Ground Control Points Using UAV. J. Korean Cartogr. Assoc. 2020, 20, 41–55. [Google Scholar] [CrossRef]
- Hastaoglu, K.O.; Kapicioglu, H.S.; Gül, Y.; Poyraz, F. Investigation of the effect of height difference and geometry of GCP on position accuracy of point cloud in UAV photogrammetry. Surv. Rev. 2023, 55, 325–337. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).