
Finite Element Analysis for Linear Viscoelastic Materials Considering Time-Dependent Poisson’s Ratio: Variable Stiffness Method



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Basic Principles of the Variable Stiffness Method in Finite Element Analysis of Viscoelastic Materials
2.1. The Generalized Maxwell Model for Viscoelastic Materials
2.2. Integral Constitutive Relationship of Viscoelastic Materials
3. Finite Element Analysis of Viscoelastic Materials Considering Time-Dependent Poisson’s Ratio
3.1. The Foundation of Convolutional Integral for Viscoelastic Materials
3.2. Calculation Steps of Finite Element Analysis for Viscoelastic Materials Considering Time-Dependent Poisson’s Ratio
- (1)
- Data Initialization
- (2)
- Elastic calculation at the initial time ()
- (3)
- Calculation at the second time point, i.e.,
- (4)
- From the third time point onwards, repeat the following steps:
4. Verification and Discussion of the Example
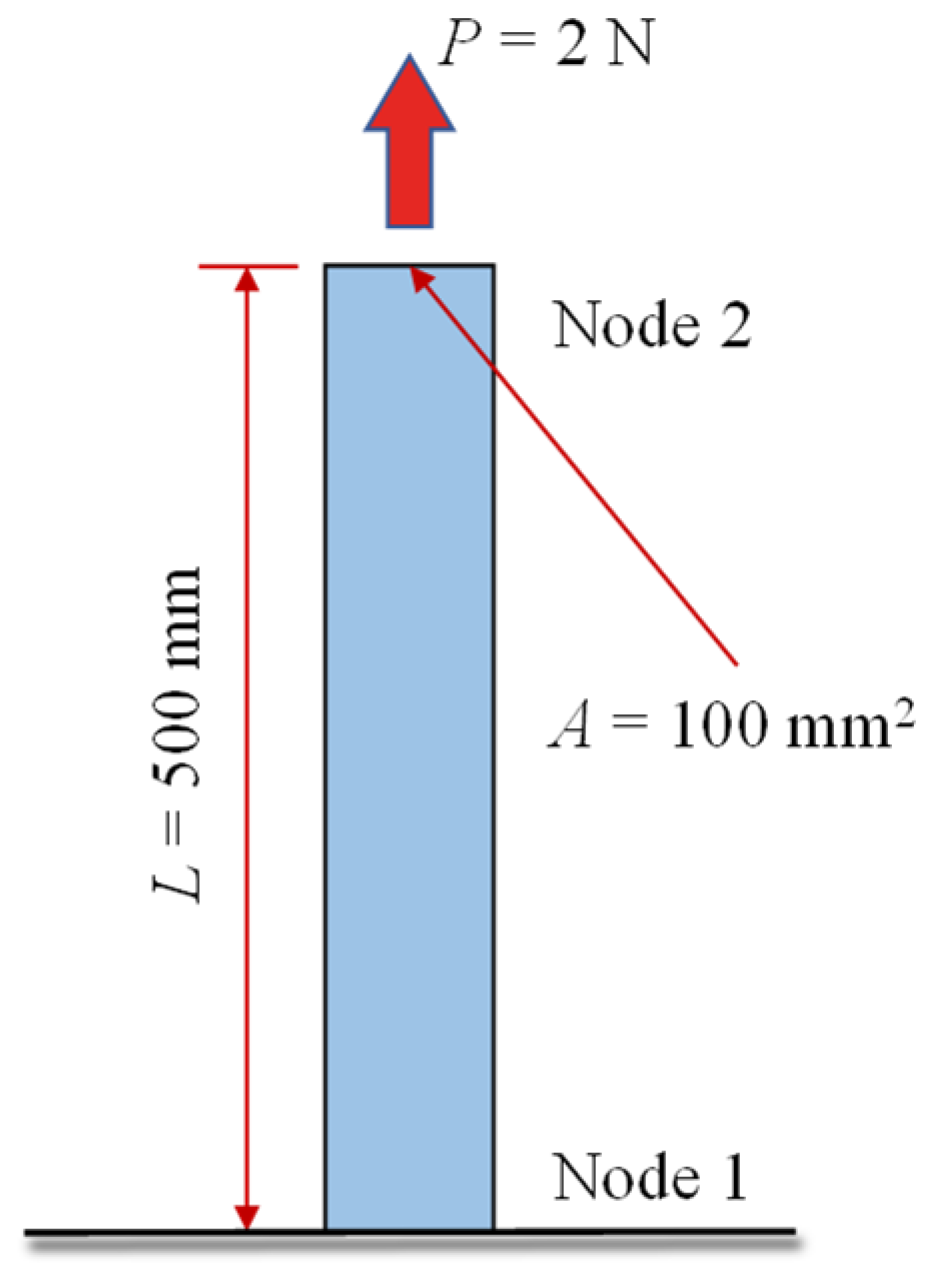
4.1. Viscoelastic Displacement of the Rod Subject to Uniaxial Tension
4.1.1. Parameter Specification
4.1.2. Analytical Solution
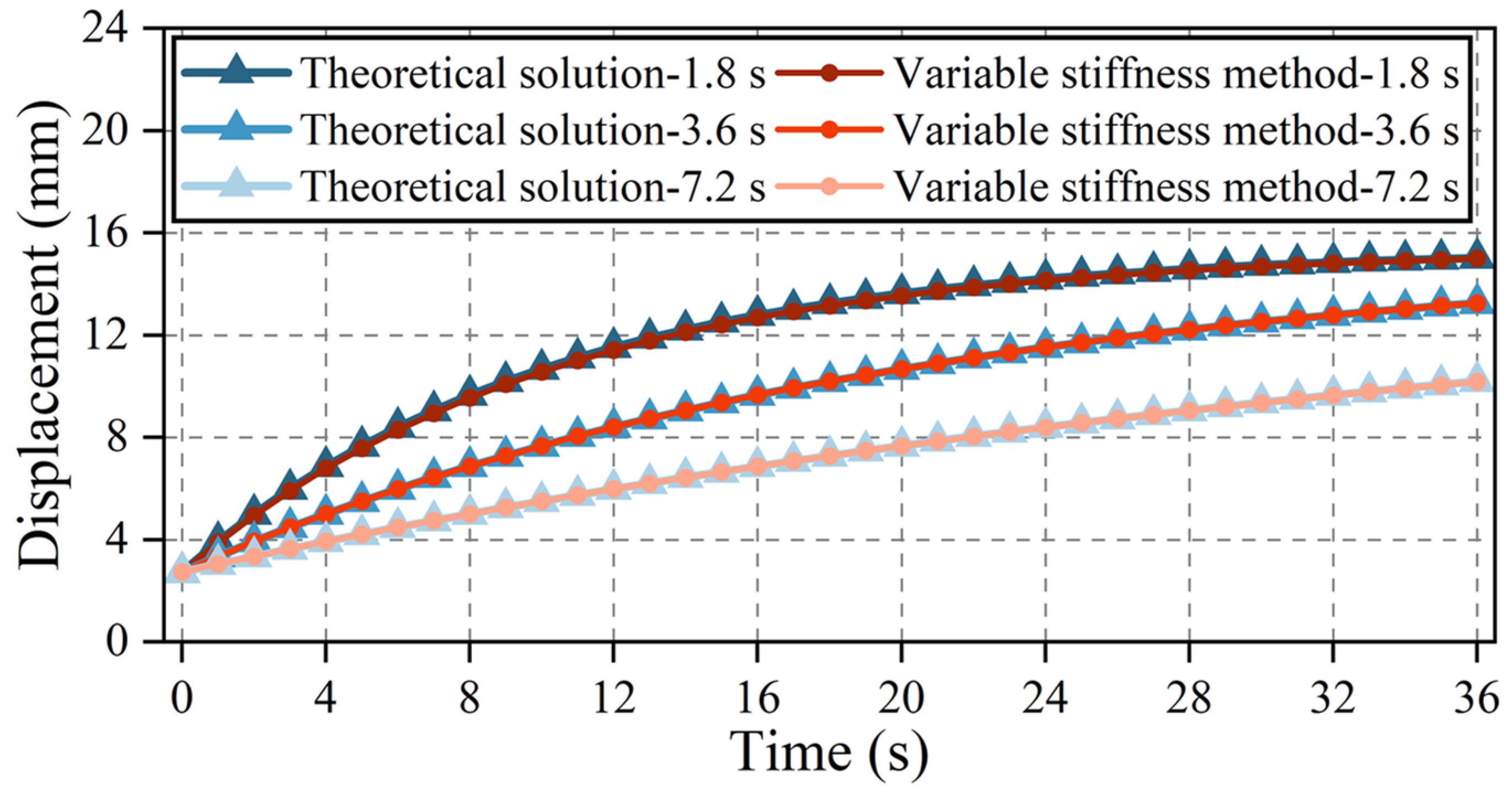
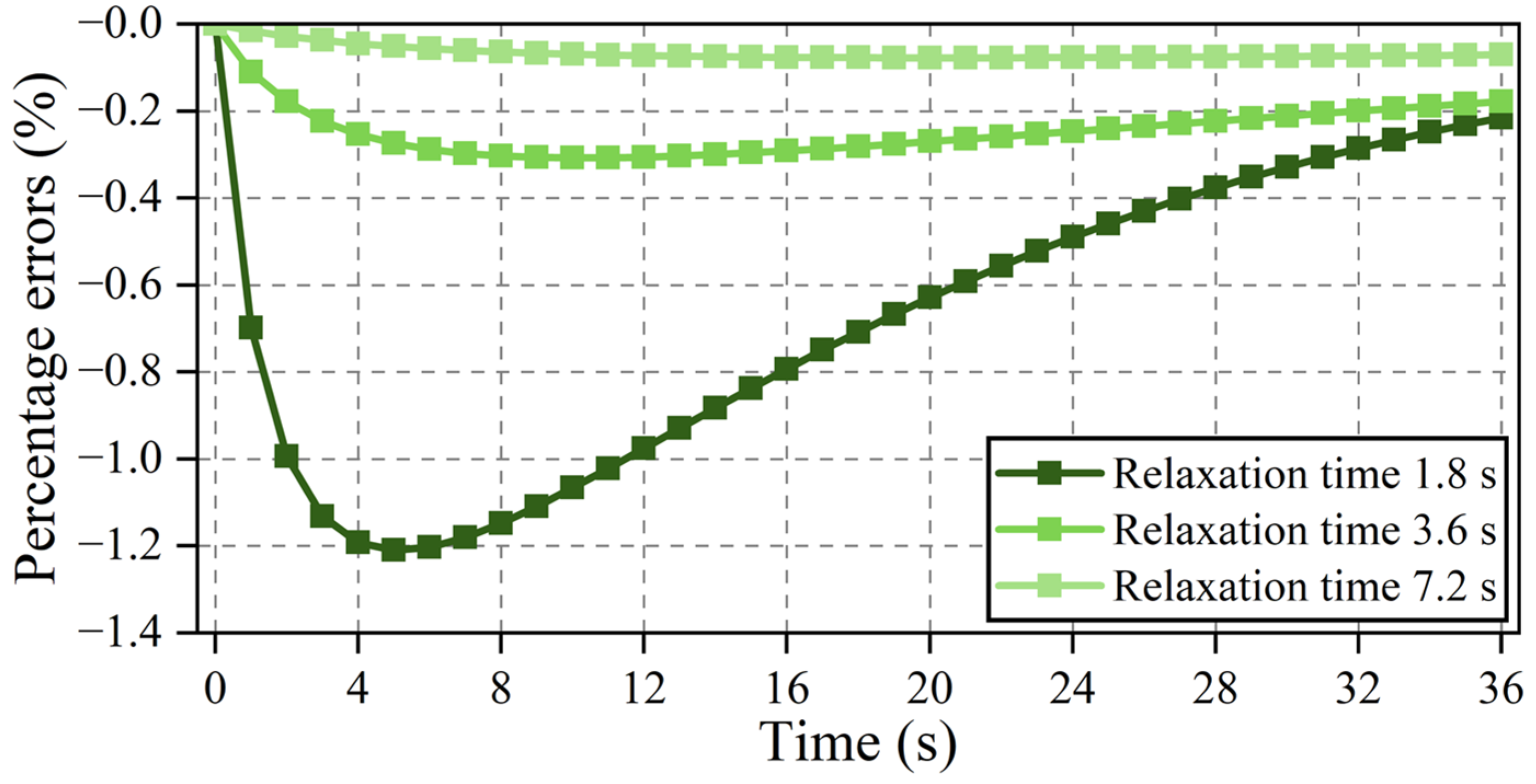
4.1.3. Comparison and Discussion of Simulation Results
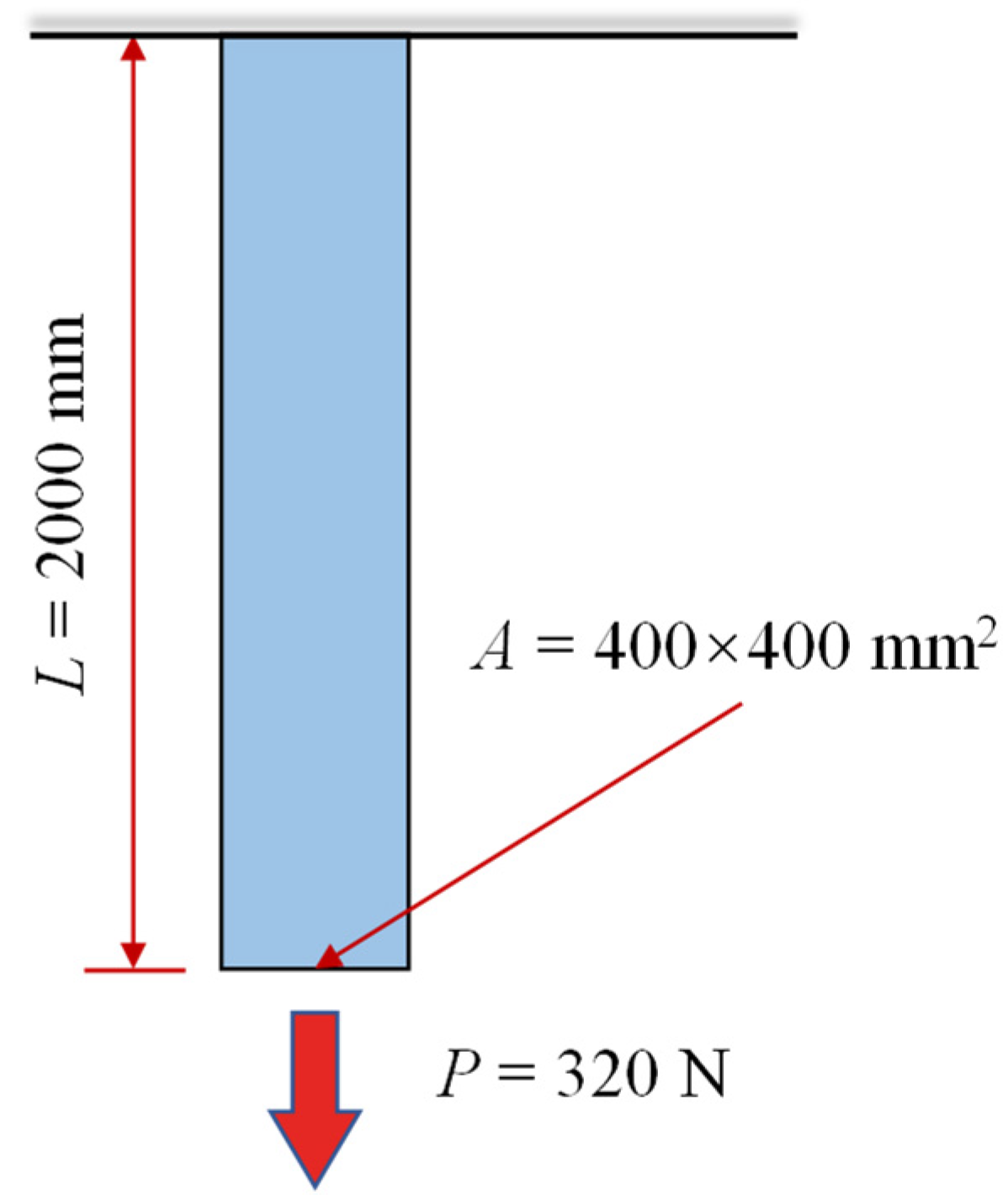
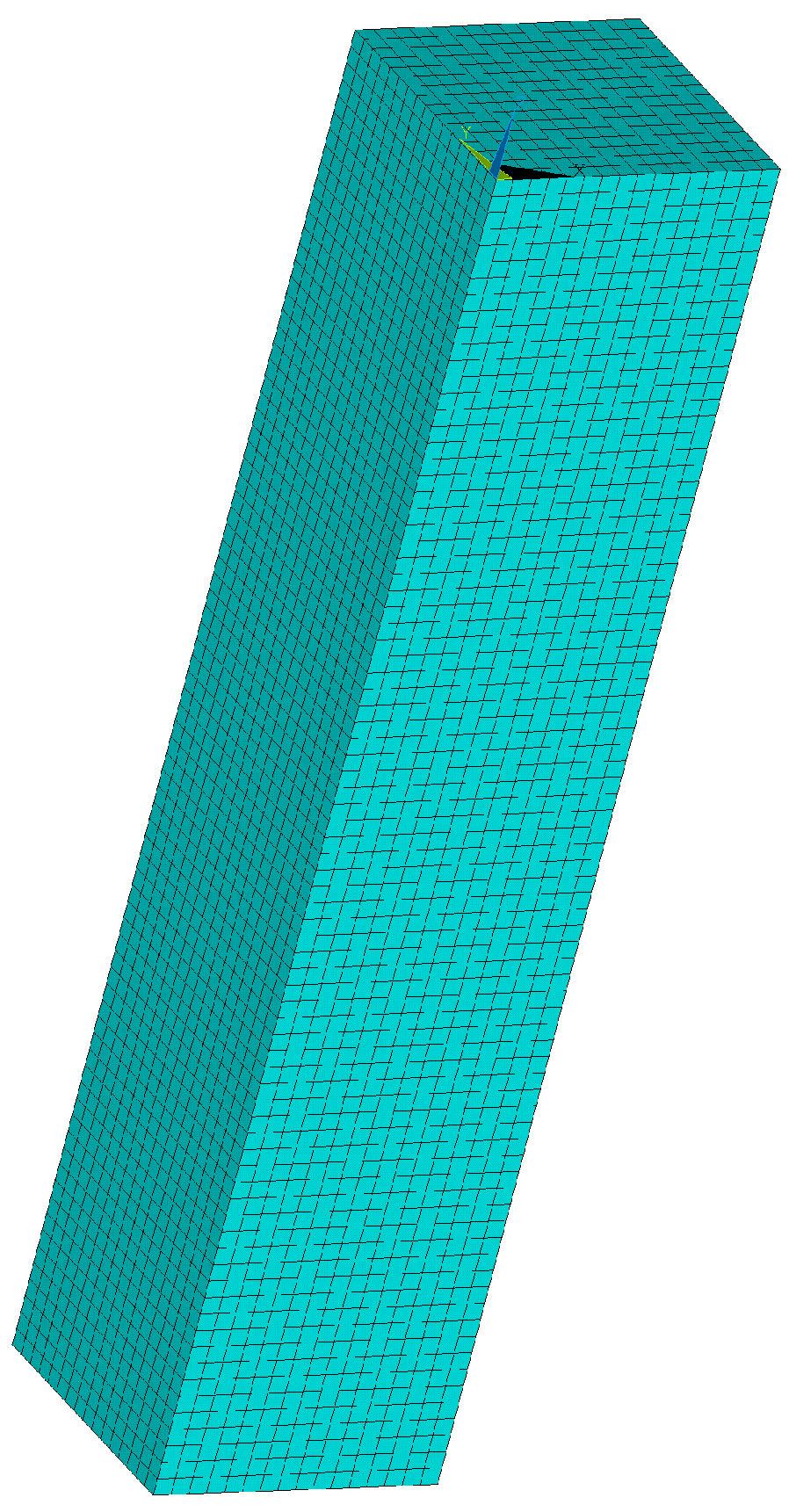
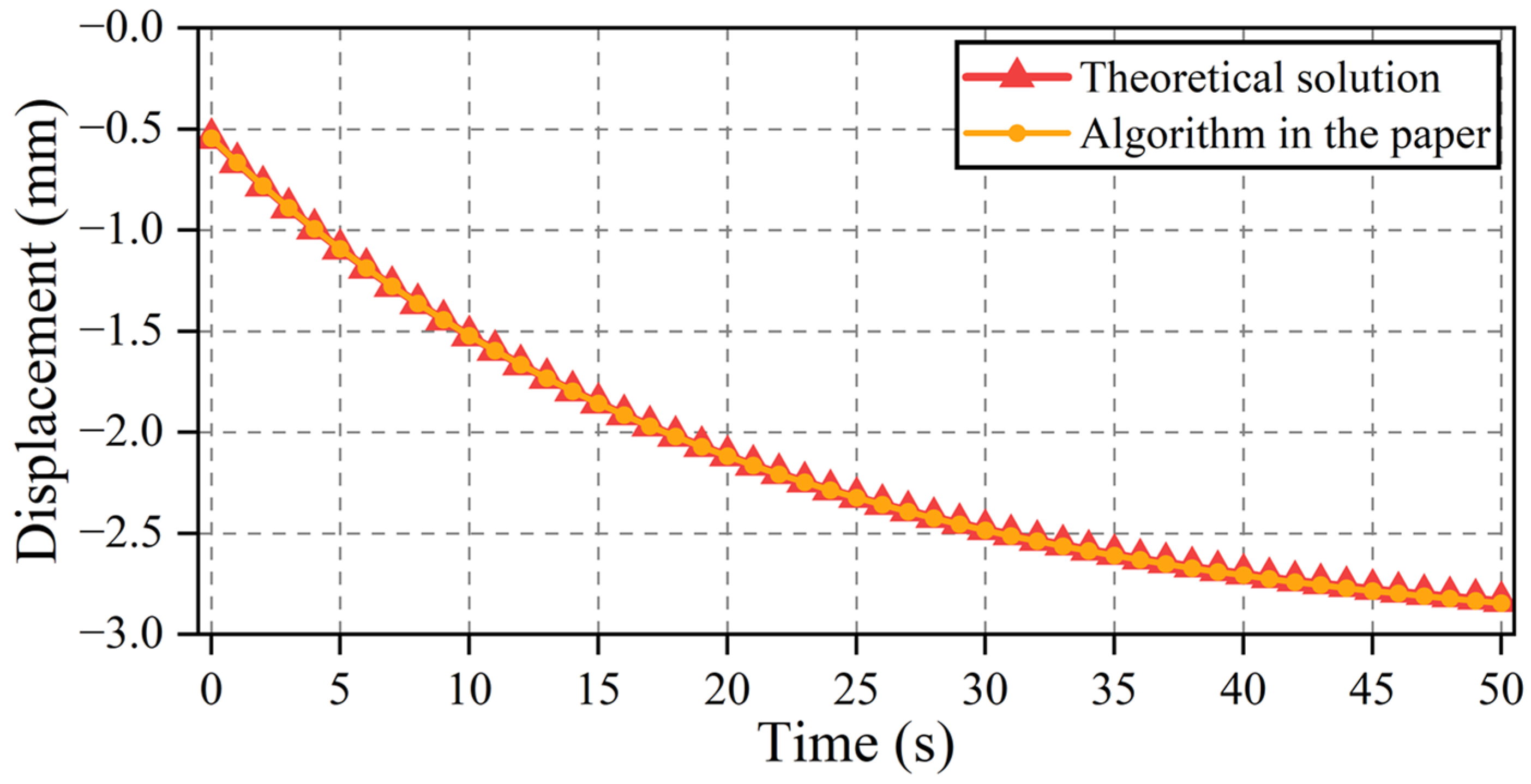
4.2. Viscoelastic Displacement of Slender Members with Equal Cross-Section under Self-Weight Effect
4.2.1. Information Detail
4.2.2. Analytical Solution of Viscoelastic Displacement
5. Conclusions
- (1)
- In contrast to the initial strain method derived from the differential constitutive relationship, this algorithm can simultaneously account for the variation in the elastic modulus and Poisson’s ratio over time, thus establishing a more precise simulation pathway and a novel perspective for modeling the mechanical properties of viscoelastic materials.
- (2)
- Compared to the initial strain method for linear viscoelastic materials, the proposed variable stiffness method considering the time-dependent Poisson’s ratio effectively avoids the assumption of constant stress over small time intervals, thereby significantly enhancing the accuracy of the finite element calculations for linear viscoelastic materials.
- (3)
- Compared to the finite element method commonly used in commercial software, the proposed variable stiffness method considering the time-dependent Poisson’s ratio, with the elastic modulus and Poisson’s ratio as material parameters, establishes a simulation algorithm that aligns with experiments on viscoelastic materials.
- (4)
- The proposed variable stiffness method considering the time-dependent Poisson’s ratio and its calculation process effectively fits the coefficients of the Prony series for the elastic modulus and Poisson’s ratio directly based on experimental data, thereby reducing errors introduced during the transformation of material parameters when using commercial software. Future research will include additional experimental testing, convergence analysis, and investigation into computational efficiency.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Isono, Y. Viscoelastic Properties of Rubbery Materials: 1. Polymer Viscoelasticity. Nippon Gomu Kyokaishi 2018, 91, 351–357. [Google Scholar] [CrossRef]
- Hayashi, M.; Noro, A.; Matsushita, Y. Viscoelastic properties of supramolecular soft materials with transient polymer network. J. Polym. Sci. Part B Polym. Phys. 2014, 52, 755–764. [Google Scholar] [CrossRef]
- Findley, W.N.; Lai, J.S.; Onaran, K.; Christensen, R.M. Creep and Relaxation of Nonlinear Viscoelastic Materials With an Introduction to Linear Viscoelasticity. J. Appl. Mech. 1977, 44, 505–509. [Google Scholar] [CrossRef]
- Ferreira, J.A.; Oliveira, P.D.; Silva, P.M.D. Reaction–diffusion in viscoelastic materials. J. Comput. Appl. Math. 2012, 236, 3783–3795. [Google Scholar] [CrossRef][Green Version]
- Chen, D.L.; Yang, P.-F.; Lai, Y.-S. A review of three-dimensional viscoelastic models with an application to viscoelasticity characterization using nanoindentation. Microelectron. Reliab. 2012, 52, 541–558. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, H.; Li, L.; Zhang, Y.; Bai, Y. Viscoelastic Properties of Asphalt Mixtures with Different Modifiers at Different Temperatures Based on Static Creep Tests. Appl. Sci. 2019, 9, 4246. [Google Scholar] [CrossRef]
- Zhao, Y.; Ni, Y.; Zeng, W. A consistent approach for characterising asphalt concrete based on generalised Maxwell or Kelvin model. Road Mater. Pavement Des. 2014, 15, 674–690. [Google Scholar] [CrossRef]
- Huang, W.; Wang, H.; Yin, Y.; Zhang, X.; Yuan, J. Microstructural Modeling of Rheological Mechanical Response for Asphalt Mixture Using an Image-Based Finite Element Approach. Materials 2019, 12, 2041. [Google Scholar] [CrossRef]
- Makris, N. The frequency response function of the creep compliance. Meccanica 2019, 54, 19–31. [Google Scholar] [CrossRef]
- Tola, C.; Nikbay, M. Solid rocket motor propellant optimization with coupled internal ballistic–structural interaction approach. J. Spacecr. Rocket. 2018, 55, 936–947. [Google Scholar] [CrossRef]
- Yıldırım, H.; Özüpek, Ş. Structural assessment of a solid propellant rocket motor: Effects of aging and damage. Aerosp. Sci. Technol. 2011, 15, 635–641. [Google Scholar] [CrossRef]
- Chen, X.; Xu, J.S.; Zheng, J. Solid Propellant Viscoelastic Mechanics; Beijing Institute of Technology Press: Beijing, China, 2016. [Google Scholar]
- Cialdea, A.; Dolce, E.; Leonessa, V.; Malaspina, A. New integral representations in the linear theory of viscoelastic materials with voids. Publ. l’Inst. Math. 2014, 96, 49–65. [Google Scholar] [CrossRef]
- Sedef, M.; Samur, E.; Basdogan, C. Real-Time Finite-Element Simulation of Linear Viscoelastic Tissue Behavior Based on Experimental Data. IEEE Comput. Graph. Appl. 2006, 26, 58–68. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Liu, J. Viscoelastic creep properties and mesostructure modeling of basalt fiber-reinforced asphalt concrete. Constr. Build. Mater. 2018, 259, 119680. [Google Scholar] [CrossRef]
- Bakhshi, B.; Arabani, M. Numerical Evaluation of Rutting in Rubberized Asphalt Mixture Using Finite Element Modeling Based on Experimental Viscoelastic Properties. J. Mater. Civ. Eng. 2018, 30, 04018088. [Google Scholar] [CrossRef]
- Kolsky, H. An Investigation of the Mechanical Properties of Materials Very High Rates of Loading. Proc. Phys. Soc. Sect. B 1949, 62, 676–700. [Google Scholar] [CrossRef]
- Chen, W.; Lu, F.; Cheng, M. Tension and compression tests of two polymers under quasi-static and dynamic loading. Polym. Test. 2002, 21, 113–121. [Google Scholar] [CrossRef]
- Liu, J.; Lin, P.; Li, X.; Wang, S.-Q. Nonlinear stress relaxation behavior of ductile polymer glasses from large extension and compression. Polymer 2015, 81, 129–139. [Google Scholar] [CrossRef]
- Tschoegl, N.W.; Knauss, W.G.; Emri, I. Poisson’s ratio in linear viscoelasticity–a critical review. Mech. Time Depend. Mater. 2002, 6, 3–51. [Google Scholar] [CrossRef]
- Lakes, R.S.; Wineman, A. On Poisson’s ratio in linearly viscoelastic solids. J. Elast. 2006, 85, 45–63. [Google Scholar] [CrossRef]
- Hilton, H.H. Elastic and viscoelastic Poisson’s ratios: The theoretical mechanics perspective. Mater. Sci. Appl. 2017, 8, 291–332. [Google Scholar] [CrossRef]
- Hilton, H.H.; Yi, S. The significance of (an)isotropic viscoelastic Poisson ratio stress and time dependencies. Int. J. Solids Struct. 1998, 35, 3081–3095. [Google Scholar] [CrossRef]
- Chyuan, S.W. Studies of poisson’s ratio variation for solid propellant grains under ignition pressure loading. Int. J. Press. Vessel. Pip. 2003, 80, 871–877. [Google Scholar] [CrossRef]
- Angel, J.B.; Banks, J.W.; Henshaw, W.D.; Jenkinson, M.J.; Kildishev, A.V.; Kovacic, G.; Prokopeva, L.J.; Schwendeman, D.W. A high-order accurate scheme for Maxwell’s equations with a generalized dispersive material model. J. Comput. Phys. 2019, 378, 411–444. [Google Scholar] [CrossRef]
- Babaei, B.; Davarian, A.; Pryse, K.M.; Elson, E.L.; Genin, G.M. Efficient and optimized identification of generalized Maxwell viscoelastic relaxation spectra. J. Mech. Behav. Biomed. Mater. 2016, 55, 32–41. [Google Scholar] [CrossRef]
- Renaud, F.; Dion, J.-L.; Chevallier, G.; Tawfiq, I.; Lemaire, R. A new identification method of viscoelastic behavior: Application to the generalized Maxwell model. Mech. Syst. Signal Process. 2011, 25, 991–1010. [Google Scholar] [CrossRef]
- Lv, H.; Ye, W.; Tan, Y.; Zhang, D. Inter-conversion of the generalized Kelvin and generalized Maxwell model parameters via a continuous spectrum method. Constr. Build. Mater. 2022, 351, 128963. [Google Scholar] [CrossRef]
- Serra-Aguila, A.; Puigoriol-Forcada, J.; Reyes, G.; Menacho, J. Viscoelastic models revisited: Characteristics and interconversion formulas for generalized Kelvin–Voigt and Maxwell models. Acta Mech. Sin. 2019, 35, 1191–1209. [Google Scholar] [CrossRef]
- Belfiore, L.A. Mechanical Properties of Viscoelastic Materials: Basic Concepts in Linear Viscoelasticity; Wiley-Blackwell: Hoboken, NJ, USA, 2010. [Google Scholar]
- Silva, H.N.; Soares, J.B.; Parente, E., Jr.; Sousa, P.C. Implementation of a Viscoelastic Constitutive Model Using the Object-Oriented Programming Approach; Tech Science Press: Henderson, NV, USA, 2008. [Google Scholar]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Gao, J.; Wang, Y.; Bai, J.; Zhao, Z.; Luo, C. Finite Element Analysis for Linear Viscoelastic Materials Considering Time-Dependent Poisson’s Ratio: Variable Stiffness Method. Appl. Sci. 2024, 14, 3189. https://doi.org/10.3390/app14083189
Wang X, Gao J, Wang Y, Bai J, Zhao Z, Luo C. Finite Element Analysis for Linear Viscoelastic Materials Considering Time-Dependent Poisson’s Ratio: Variable Stiffness Method. Applied Sciences. 2024; 14(8):3189. https://doi.org/10.3390/app14083189
Chicago/Turabian StyleWang, Xueren, Jie Gao, Yanchao Wang, Jianfang Bai, Zhipeng Zhao, and Chao Luo. 2024. "Finite Element Analysis for Linear Viscoelastic Materials Considering Time-Dependent Poisson’s Ratio: Variable Stiffness Method" Applied Sciences 14, no. 8: 3189. https://doi.org/10.3390/app14083189
APA StyleWang, X., Gao, J., Wang, Y., Bai, J., Zhao, Z., & Luo, C. (2024). Finite Element Analysis for Linear Viscoelastic Materials Considering Time-Dependent Poisson’s Ratio: Variable Stiffness Method. Applied Sciences, 14(8), 3189. https://doi.org/10.3390/app14083189