

Multi-Robot Exploration Employing Harmonic Map Transformations



Abstract
1. Introduction
1.1. Related Works
1.2. Contributions
- The extension of the concept of HMT to incorporate frontier points on the boundary of the perceived workspace, enabling its use for exploration tasks.
- The design of a comprehensive exploration method that integrates the HMT for effective navigation and mapping in unknown environments.
- The extension of the proposed method to facilitate multi-robot exploration, enabling collaborative exploration efforts with improved efficiency and coverage.
2. Problem Formulation
3. Methodology
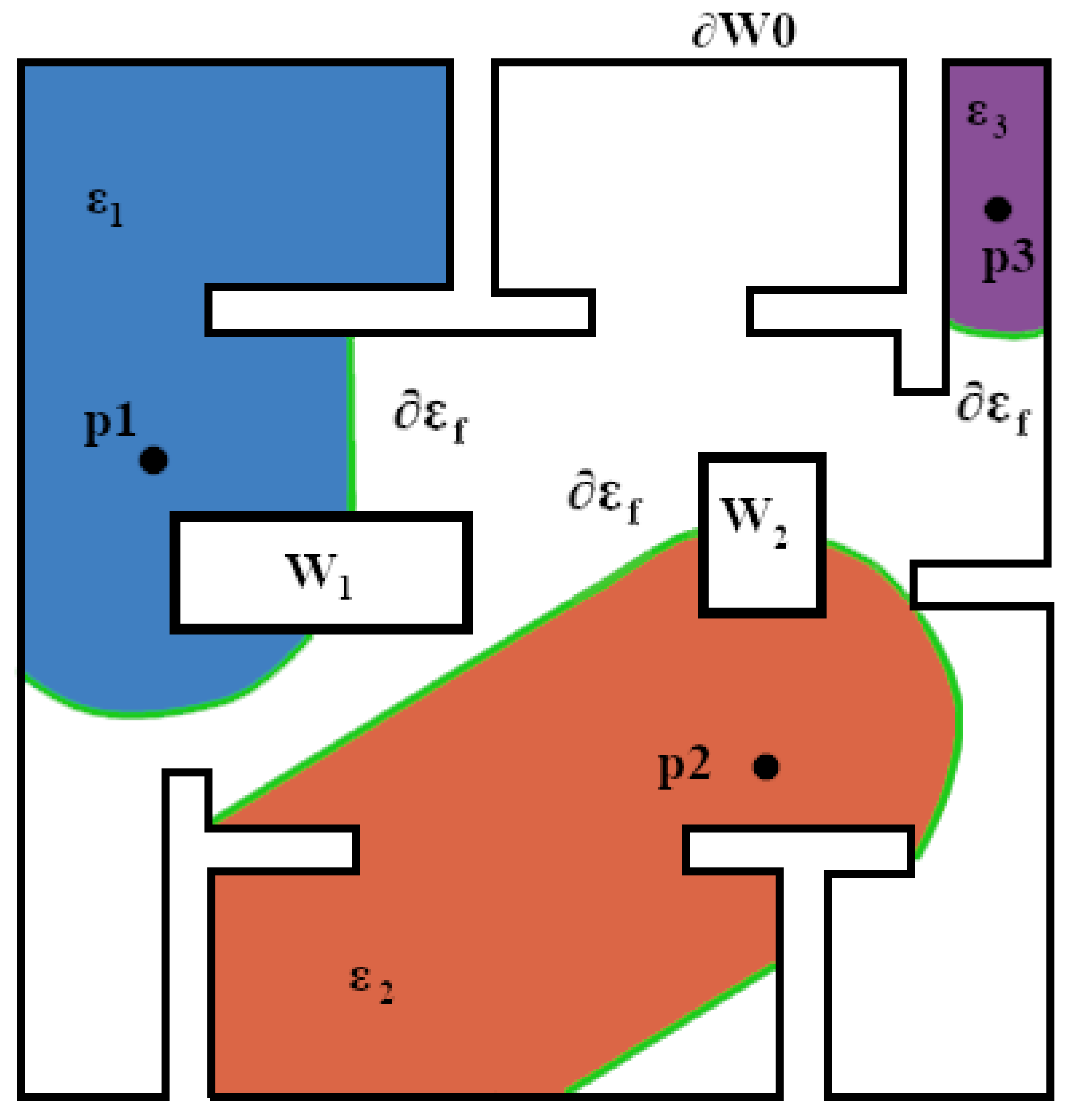
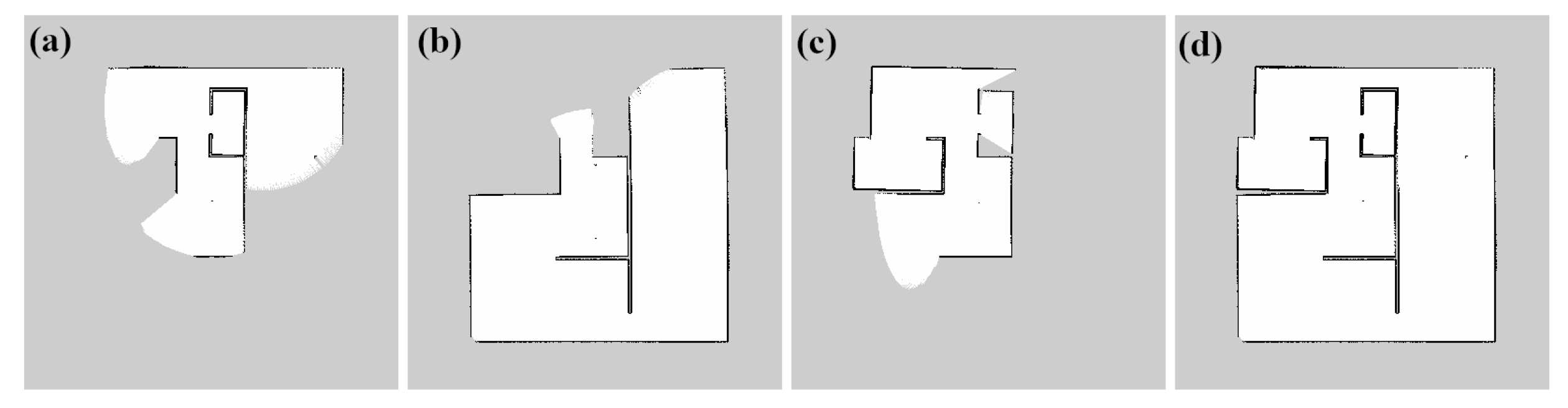
3.1. Filtering and Boundary Extraction
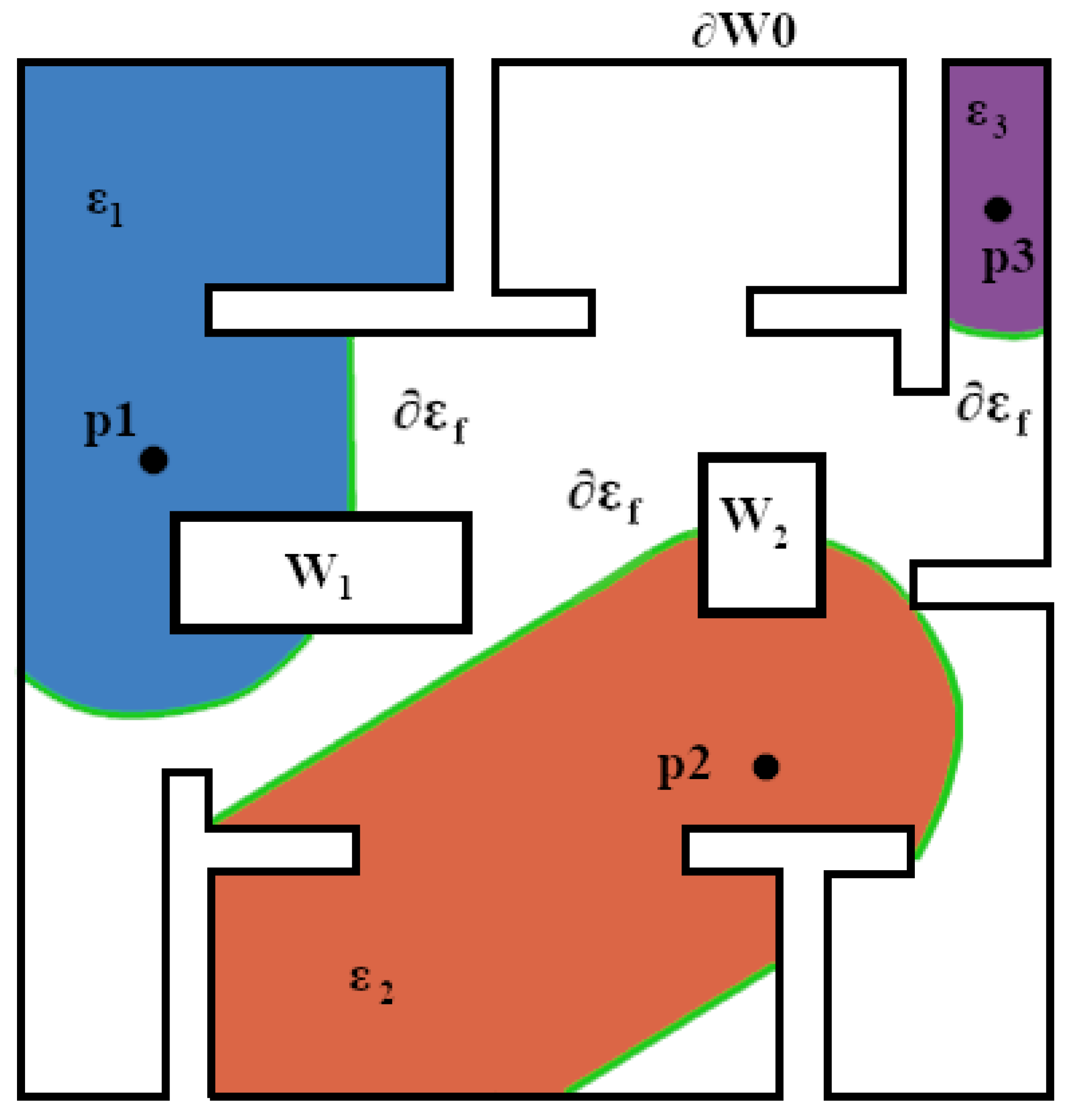
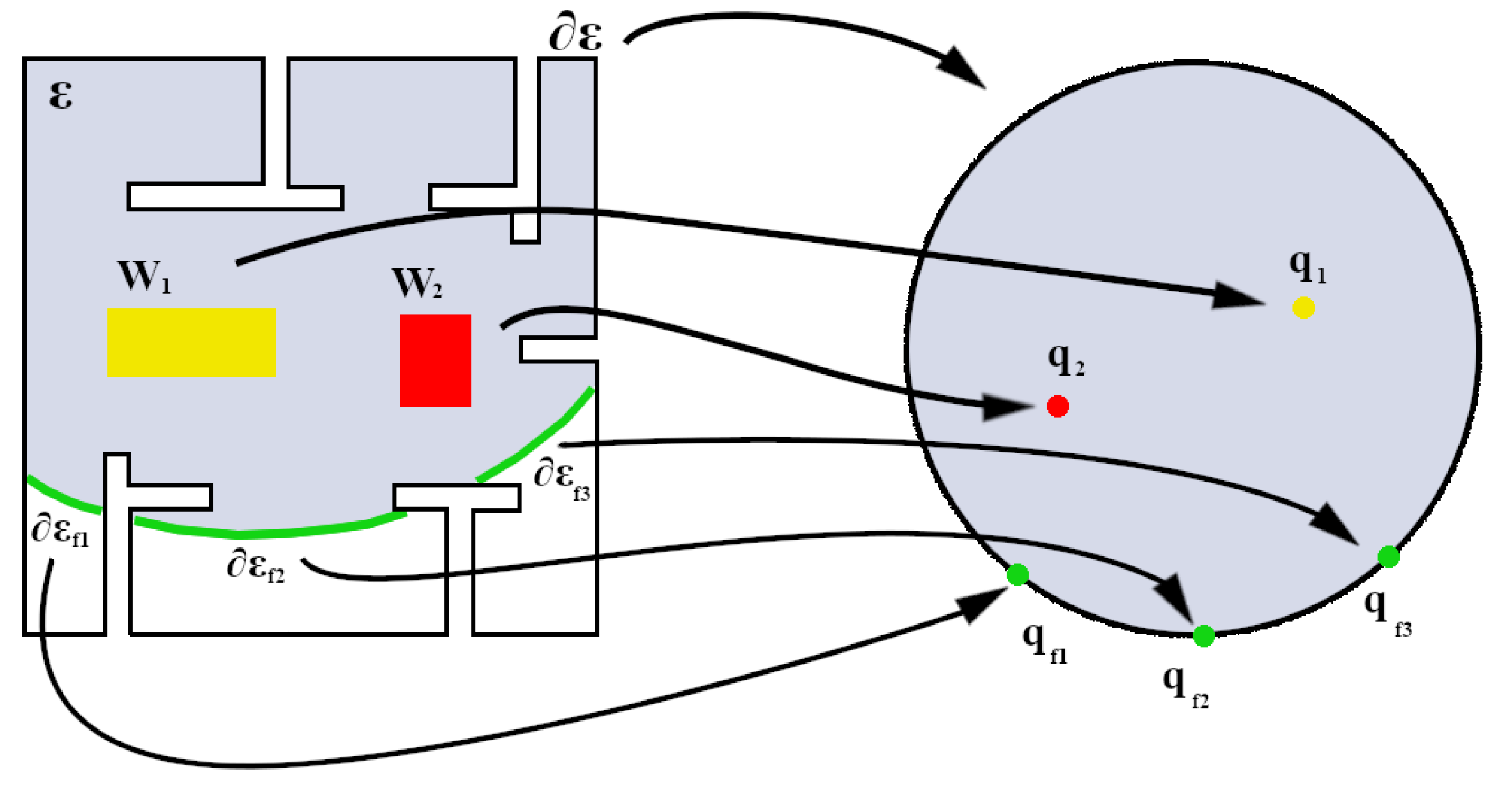
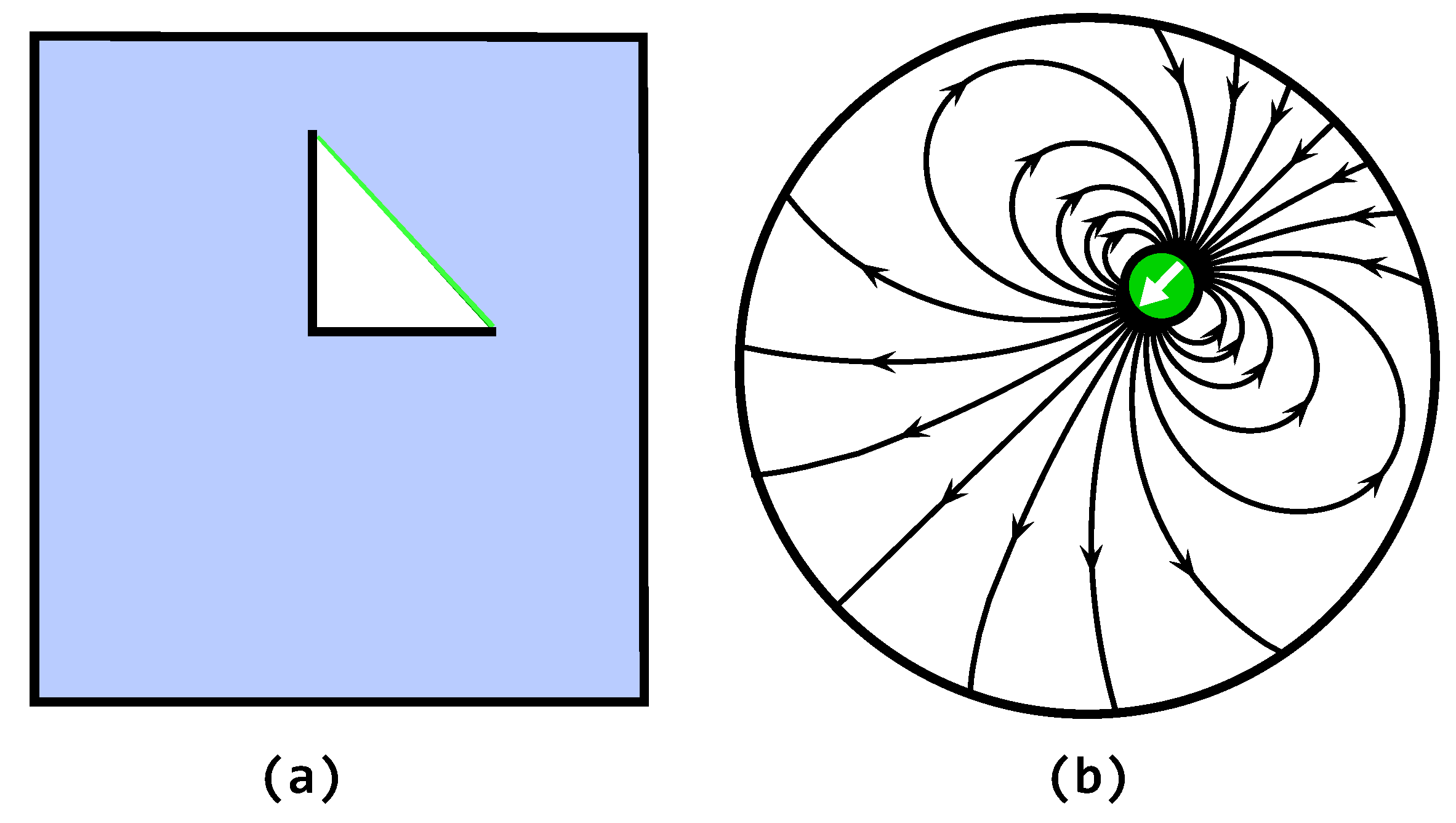
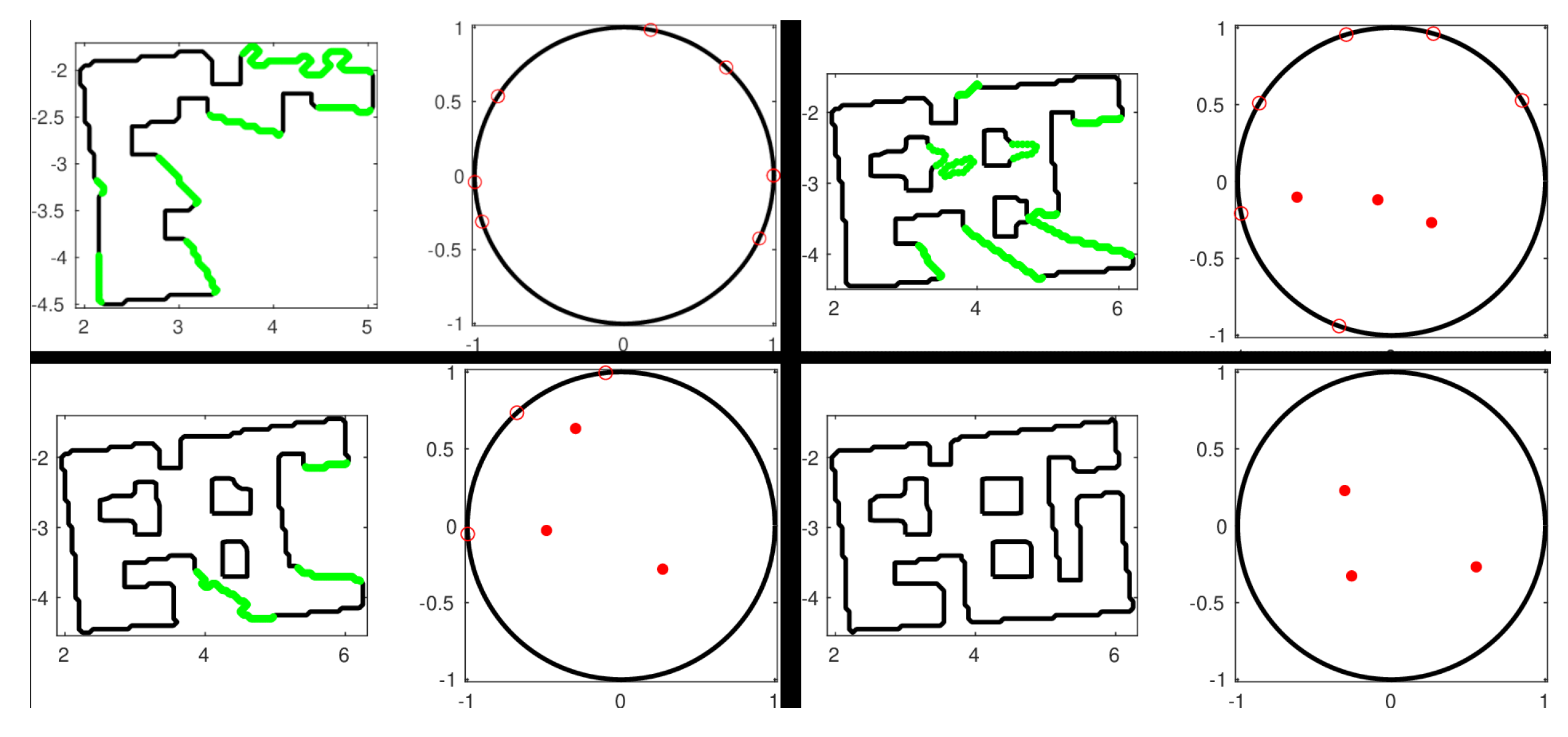
3.2. Harmonic Maps Transformation for Exploration
- Maps the explored region’s outer boundary onto the unit circle
- Maps each of the frontiers of the outer boundary into a single point
- Maps the inner obstacle boundaries that are within the explored region to a distinct point
- The transformation is a diffeomorphism for all .
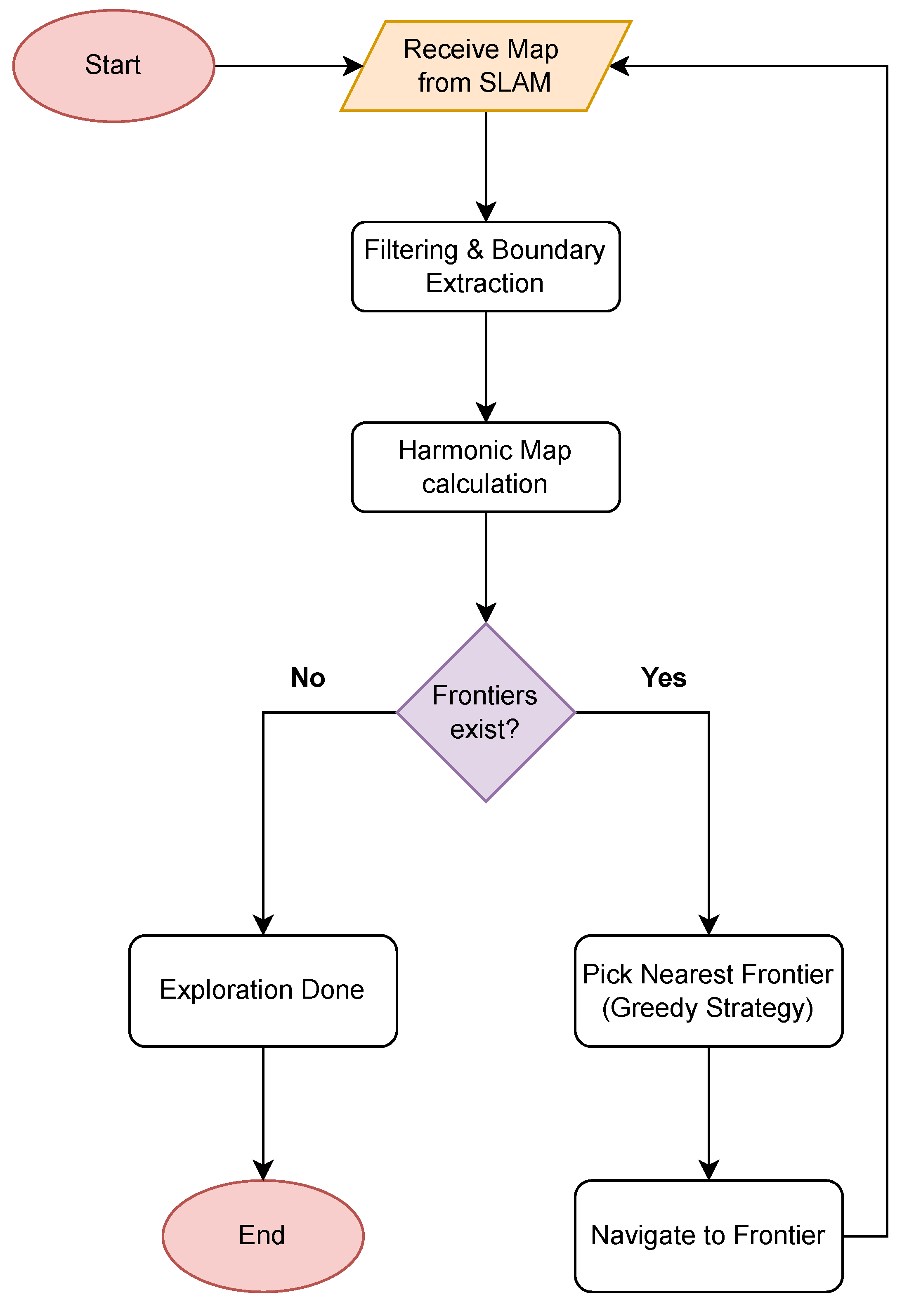
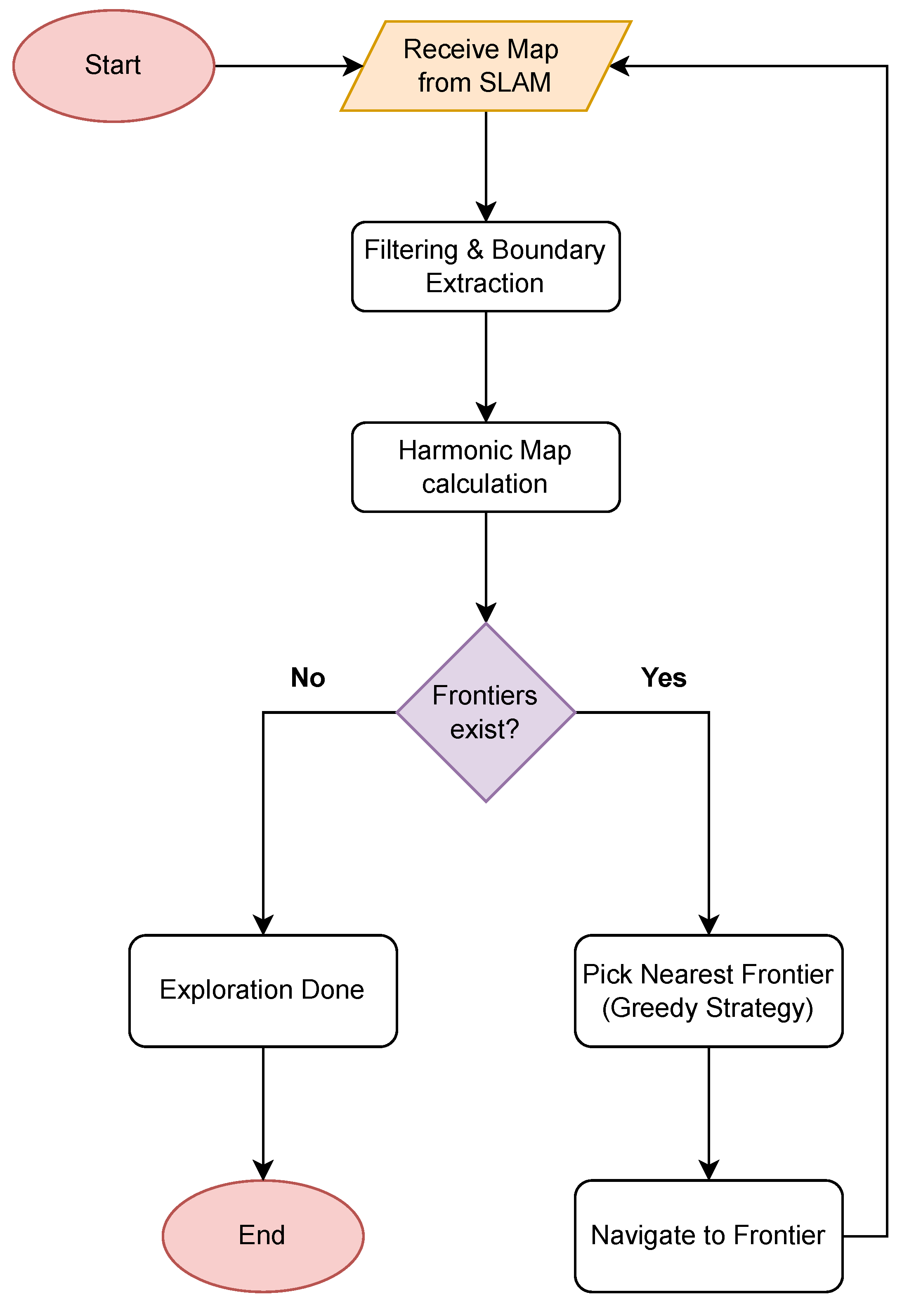
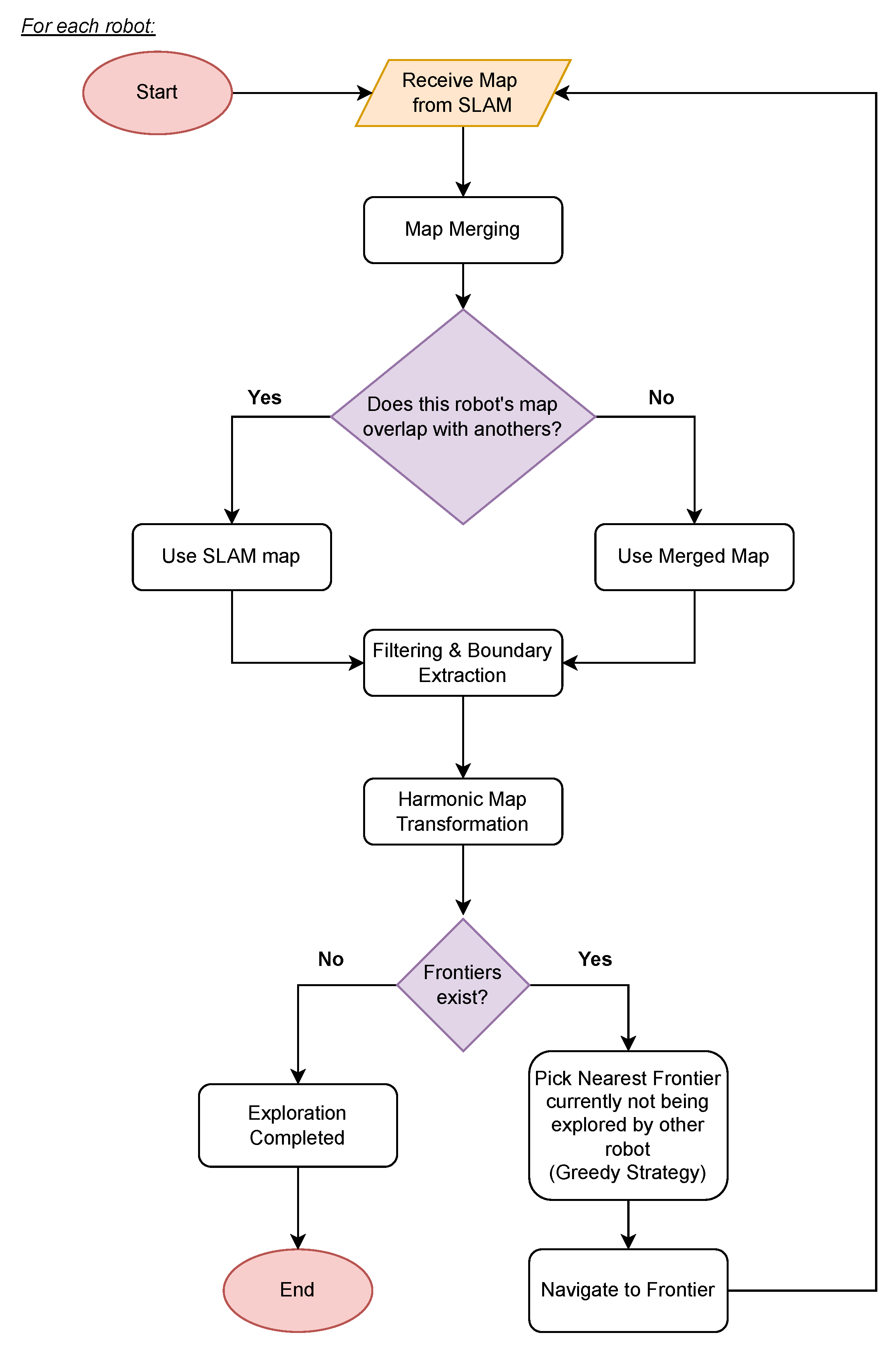
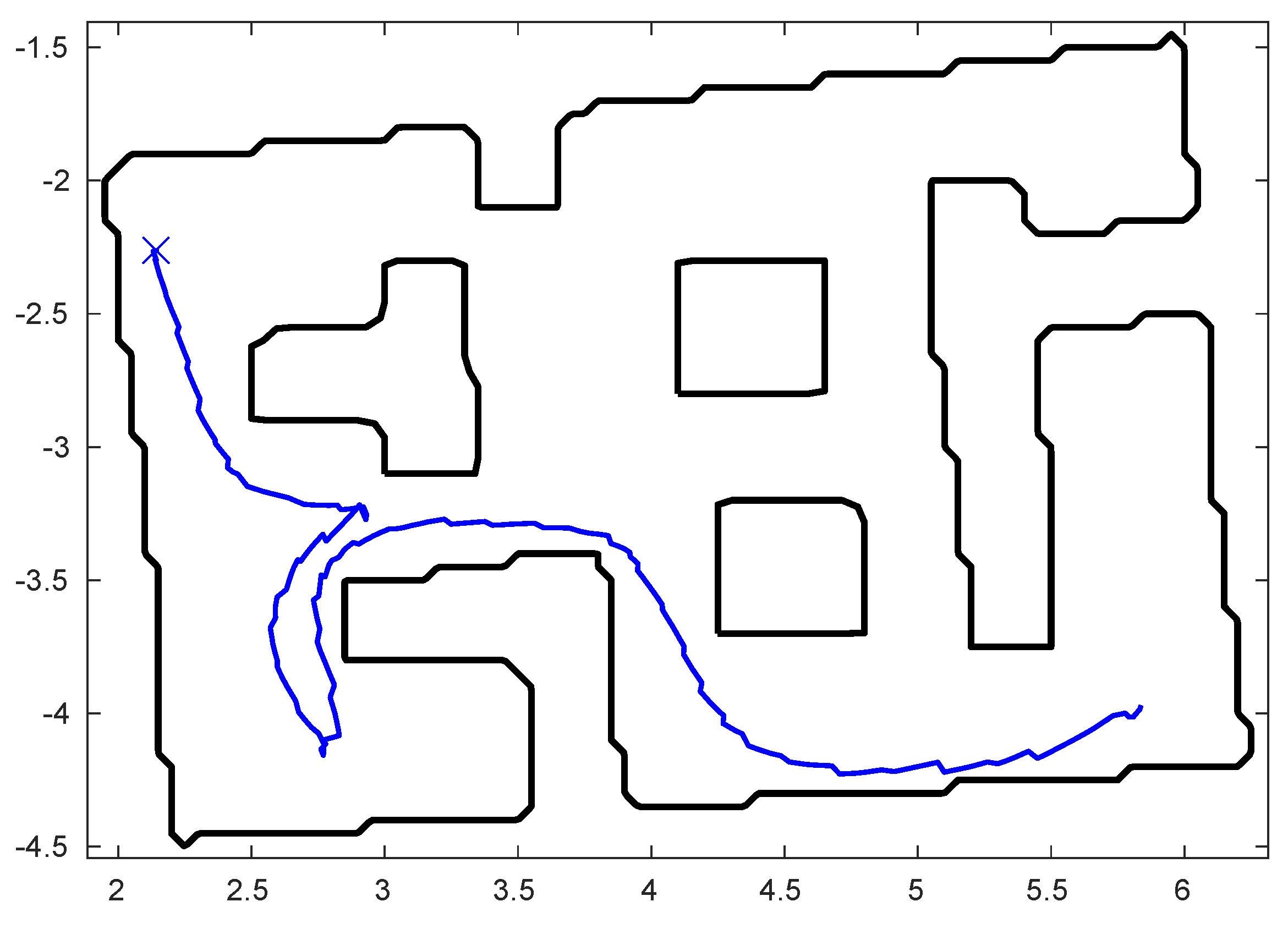
3.3. Robot Exploration
3.3.1. Single Robot

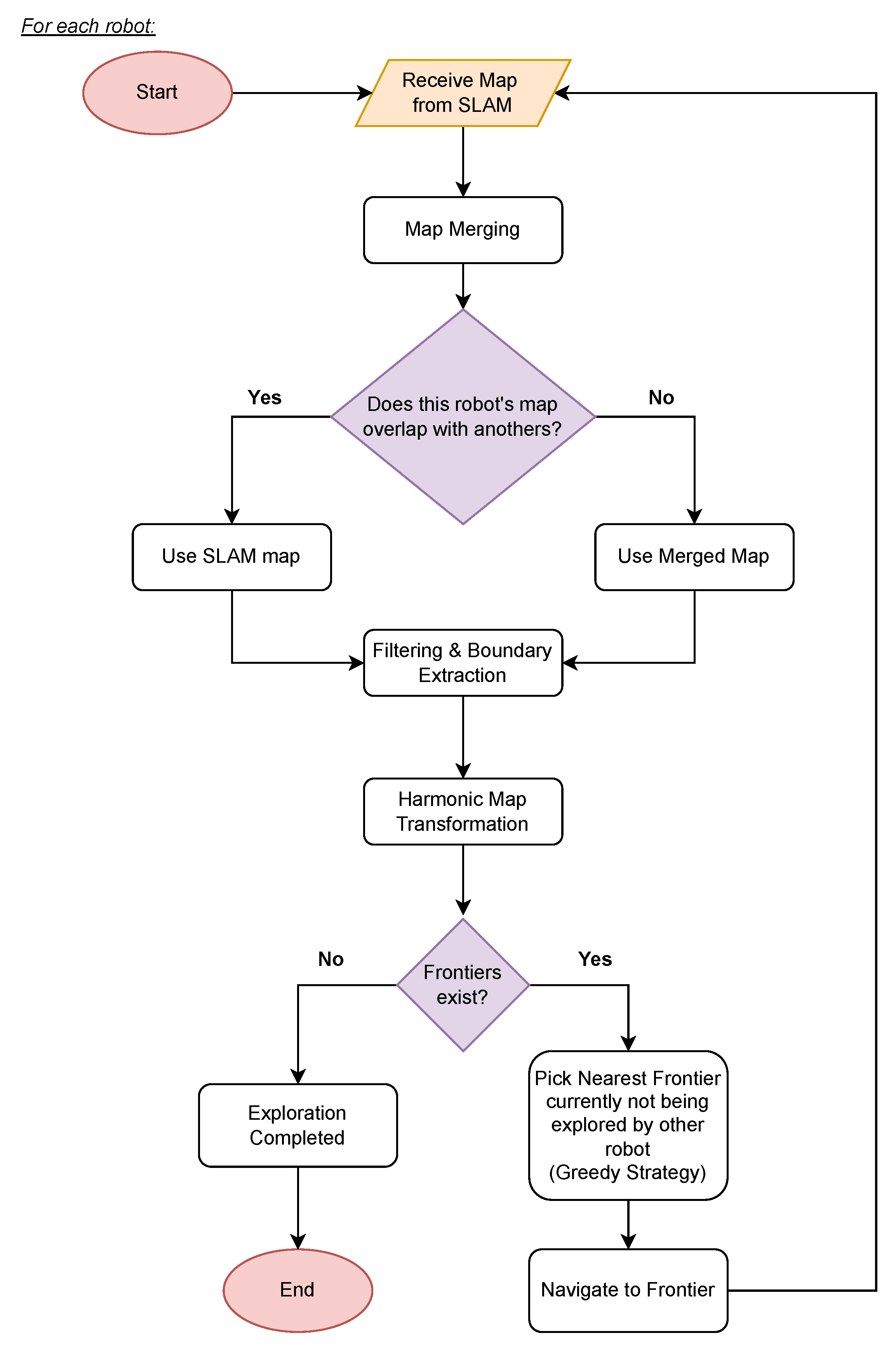
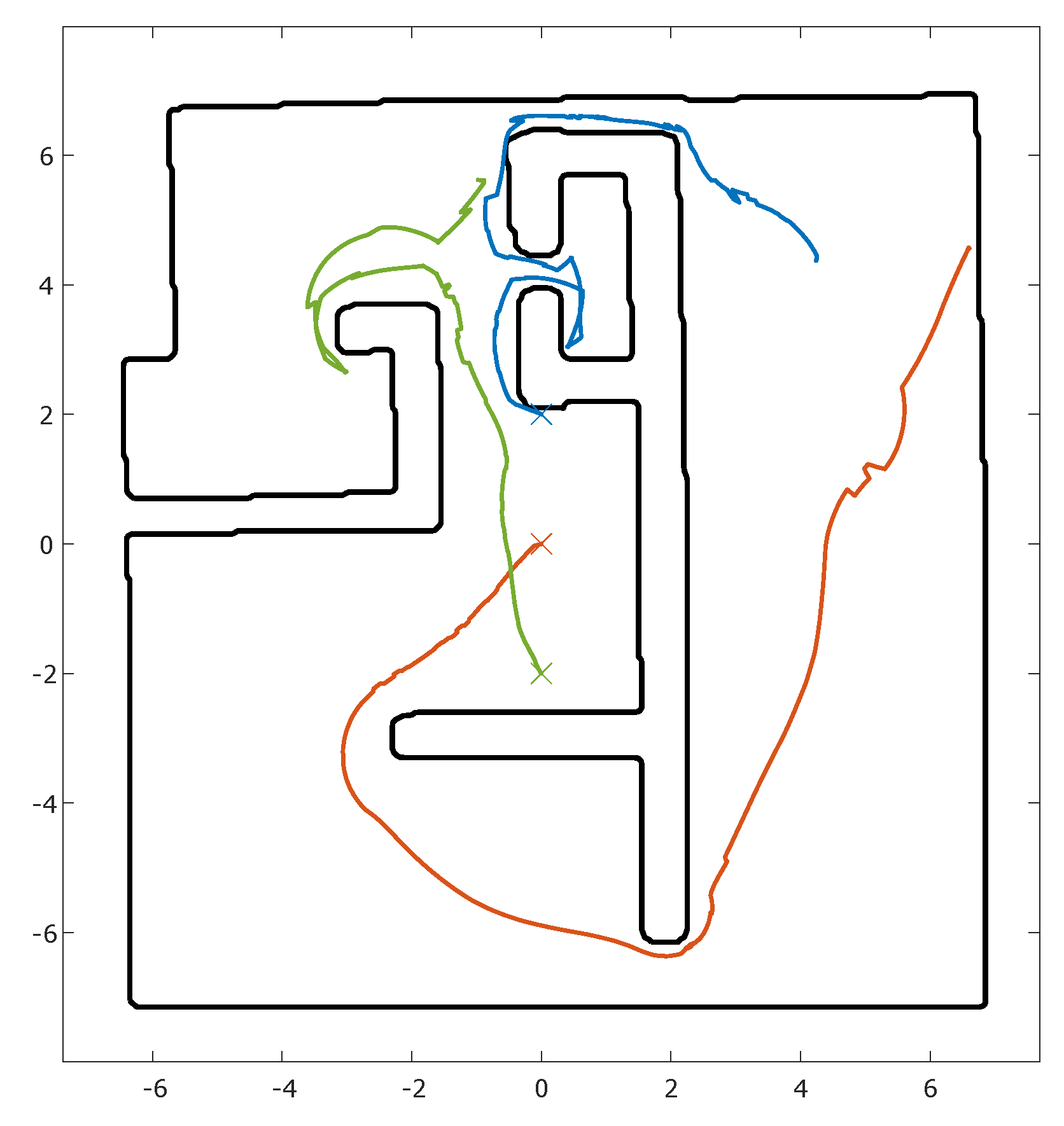
3.3.2. Multi-Robot Setup
4. Results
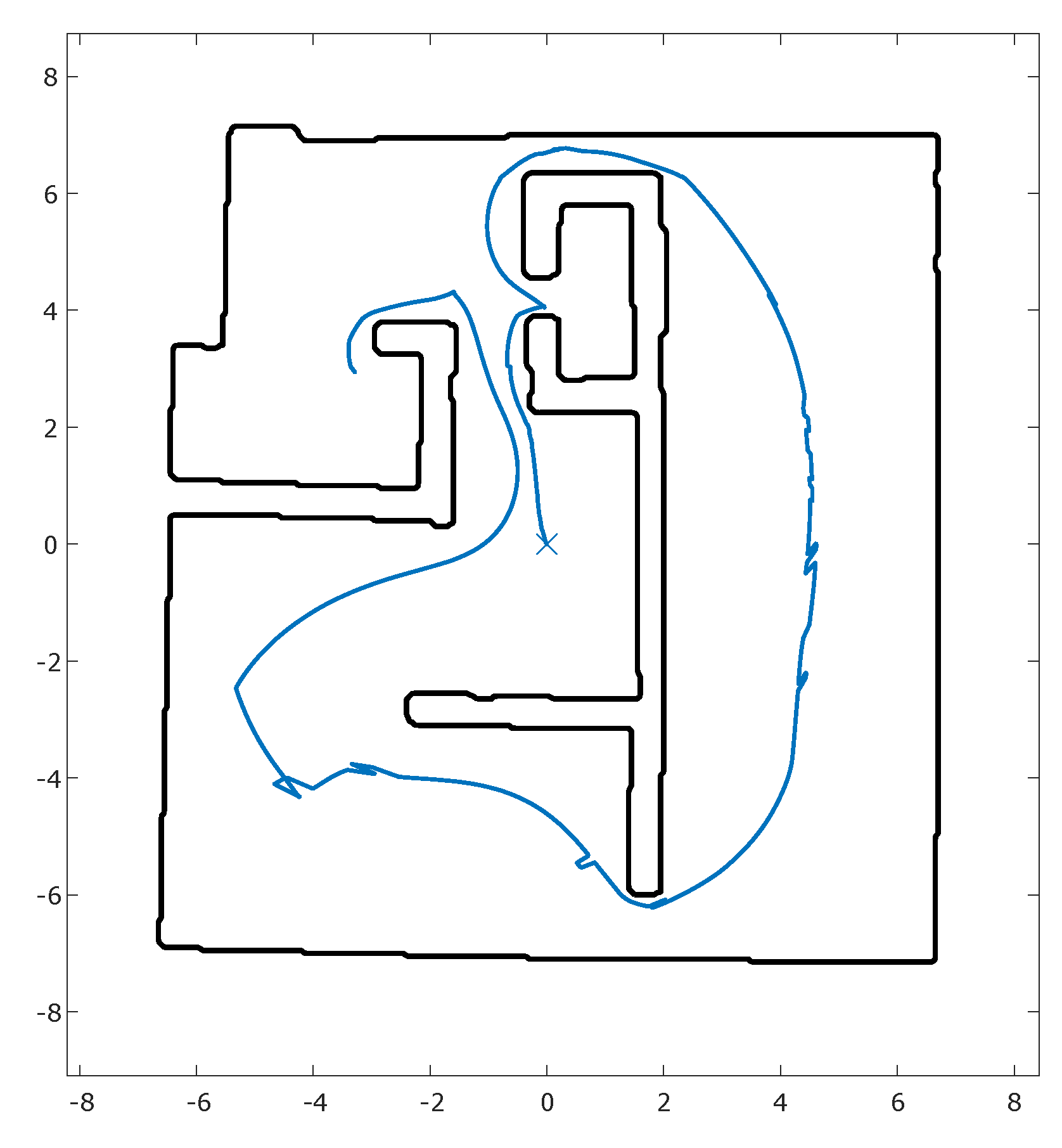
4.1. Single Robot Results
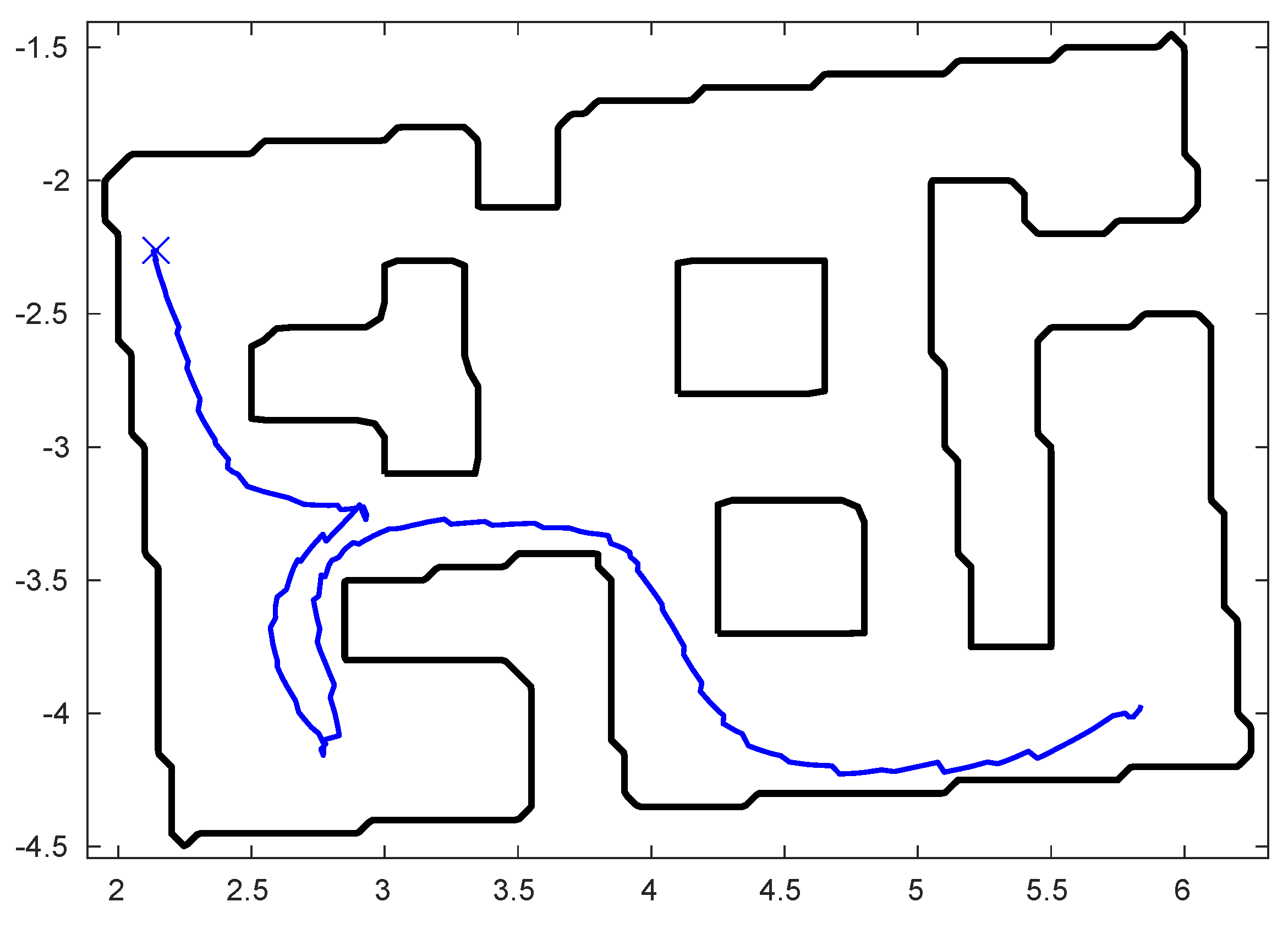
4.1.1. Simulation Results
4.1.2. Experimental Results
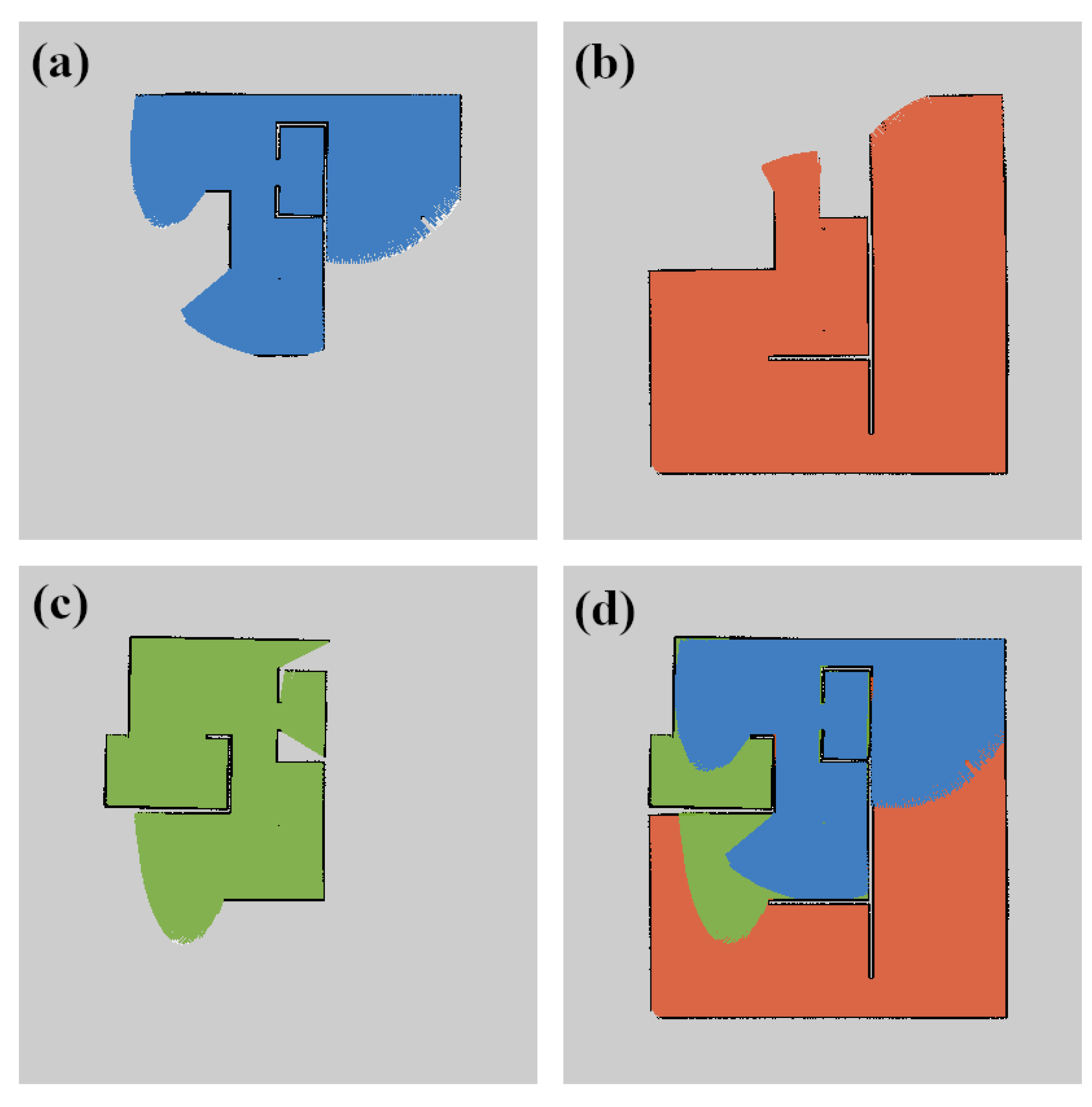
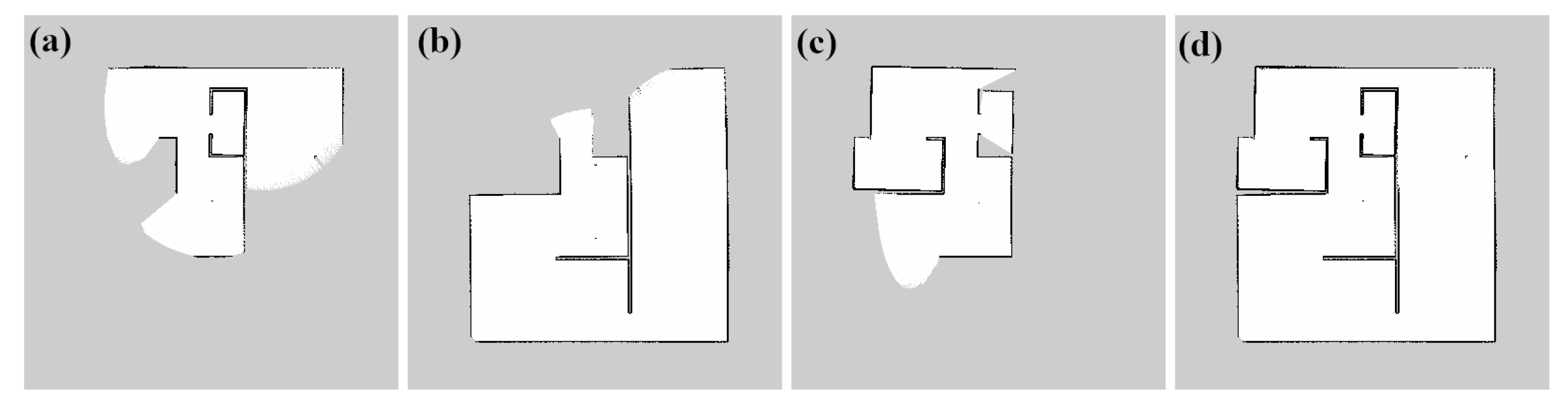
4.2. Multi-Robot Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| HMT | Harmonic Map Transformation |
| SLAM | Simultaneous Localization And Mapping |
| DRL | Deep Reinforcement Learning |
| RRT | Rapidly-exploring Random Tree |
| LIDAR | Laser Imaging, Detection, and Ranging |
| ROS | Robotic Operating System |
| PD | Path Distance |
| ET | Elapsed Time |
| CPU | Central Processing Unit |
| RAM | Random Access Memory |
| M-RRTs | Multiple-RRTs |
| RRT-GFB | RRT-Greedy Frontier-Based |
| RRT-BFS | RRT-Breadth-First Search |
| E-RRT | Extended-RRT |
| ID-RRT | Information-Driven-RRT |
| HMS-RRT | Hybrid Multi-Strategy-RRT |
References
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Yamauchi, B. A Frontier-Based Approach for Autonomous Exploration. In Proceedings of the 1997 IEEE International Symposium on Computational Intelligence in Robotics and Automation CIRA’97—‘Towards New Computational Principles for Robotics and Automation’, Monterey, CA, USA, 10–11 July 1997; pp. 146–151. [Google Scholar] [CrossRef]
- Keidar, M.; Sadeh-Or, E.; Kaminka, G.A. Fast Frontier Detection for Robot Exploration. In Advanced Agent Technology; Dechesne, F., Hattori, H., ter Mors, A., Such, J.M., Weyns, D., Dignum, F., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 281–294. [Google Scholar]
- Mobarhani, A.; Nazari, S.; Tamjidi, A.H.; Taghirad, H.D. Histogram Based Frontier Exploration. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1128–1133. [Google Scholar] [CrossRef]
- Niroui, F.; Zhang, K.; Kashino, Z.; Nejat, G. Deep Reinforcement Learning Robot for Search and Rescue Applications: Exploration in Unknown Cluttered Environments. IEEE Robot. Autom. Lett. 2019, 4, 610–617. [Google Scholar] [CrossRef]
- Zhu, D.; Li, T.; Ho, D.; Wang, C.; Meng, M.Q.H. Deep Reinforcement Learning Supervised Autonomous Exploration in Office Environments. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 7548–7555. [Google Scholar] [CrossRef]
- Duberg, D.; Jensfelt, P. UFOExplorer: Fast and Scalable Sampling-Based Exploration With a Graph-Based Planning Structure. IEEE Robot. Autom. Lett. 2022, 7, 2487–2494. [Google Scholar] [CrossRef]
- Umari, H.; Mukhopadhyay, S. Autonomous Robotic Exploration Based on Multiple Rapidly-Exploring Randomized Trees. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1396–1402. [Google Scholar] [CrossRef]
- Prestes e Silva, E.; Engel, P.M.; Trevisan, M.; Idiart, M.A. Exploration method using harmonic functions. Robot. Auton. Syst. 2002, 40, 25–42. [Google Scholar] [CrossRef]
- Grontas, P.D.; Vlantis, P.; Bechlioulis, C.P.; Kyriakopoulos, K.J. Computationally Efficient Harmonic-Based Reactive Exploration. IEEE Robot. Autom. Lett. 2020, 5, 2280–2285. [Google Scholar] [CrossRef]
- Yamauchi, B. Frontier-Based Exploration Using Multiple Robots. In Proceedings of the AGENTS ’98: Second International Conference on Autonomous Agents, Minneapolis, MN, USA, 10–13 May 1998; pp. 47–53. [Google Scholar] [CrossRef]
- Burgard, W.; Moors, M.; Fox, D.; Simmons, R.; Thrun, S. Collaborative Multi-Robot Exploration. In Proceedings of the 2000 ICRA. Millennium Conference—IEEE International Conference on Robotics and Automation—Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 476–481. [Google Scholar] [CrossRef]
- Pal, A.; Tiwari, R.; Shukla, A. Multi Robot Exploration Using a Modified A* Algorithm. In Intelligent Information and Database Systems; Nguyen, N.T., Kim, C.G., Janiak, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 506–516. [Google Scholar]
- Mukhopadhyay, S.; Umari, H.; Koirala, K. Multi-robot Map Exploration Based on Multiple Rapidly-Exploring Randomized Trees. SN Comput. Sci. 2023, 5, 31. [Google Scholar] [CrossRef]
- Ning, Y.; Li, T.; Yao, C.; Du, W.; Zhang, Y. HMS-RRT: A novel hybrid multi-strategy rapidly-exploring random tree algorithm for multi-robot collaborative exploration in unknown environments. Expert Syst. Appl. 2024, 247, 123238. [Google Scholar] [CrossRef]
- Bautin, A.; Simonin, O.; Charpillet, F. MinPos: A Novel Frontier Allocation Algorithm for Multi-robot Exploration. In Intelligent Robotics and Applications; Su, C.Y., Rakheja, S., Liu, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 496–508. [Google Scholar] [CrossRef]
- Yu, J.; Tong, J.; Xu, Y.; Xu, Z.; Dong, H.; Yang, T.; Wang, Y. SMMR-Explore: SubMap-Based Multi-Robot Exploration System with Multi-robot Multi-Target Potential Field Exploration Method. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 8779–8785. [Google Scholar] [CrossRef]
- Rousseas, P.; Karras, G.C.; Bechlioulis, C.P.; Kyriakopoulos, K.J. Indoor Visual Exploration with Multi-Rotor Aerial Robotic Vehicles. Sensors 2022, 22, 5194. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Niu, H.; Carrasco, J.; Lennox, B.; Arvin, F. Voronoi-Based Multi-Robot Autonomous Exploration in Unknown Environments via Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2020, 69, 14413–14423. [Google Scholar] [CrossRef]
- Latif, E.; Parasuraman, R. SEAL: Simultaneous Exploration and Localization for Multi-Robot Systems. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 5358–5365. [Google Scholar] [CrossRef]
- Bone, S.; Bartolomei, L.; Kennel-Maushart, F.; Chli, M. Decentralised Multi-Robot Exploration Using Monte Carlo Tree Search. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 7354–7361. [Google Scholar] [CrossRef]
- Vlantis, P.; Bechlioulis, C.P.; Kyriakopoulos, K.J. Robot Navigation in Complex Workspaces Employing Harmonic Maps and Adaptive Artificial Potential Fields. Sensors 2023, 23, 4464. [Google Scholar] [CrossRef] [PubMed]
- Olfati-Saber, R. Near-Identity Diffeomorphisms and Exponential /spl epsi/-Tracking and /spl epsi/-Stabilization of First-Order Nonholonomic SE(2) Vehicles. In Proceedings of the 2002 American Control Conference (IEEE Cat. No.CH37301), Anchorage, AK, USA, 8–10 May 2002; Volume 6, pp. 4690–4695. [Google Scholar] [CrossRef]
- Loizou, S.G.; Kyriakopoulos, K.J. Navigation of Multiple Kinematically Constrained Robots. IEEE Trans. Robot. 2008, 24, 221–231. [Google Scholar] [CrossRef]
- Kim, J.O.; Khosla, P. Real-time obstacle avoidance using harmonic potential functions. IEEE Trans. Robot. Autom. 1992, 8, 338–349. [Google Scholar] [CrossRef]
- Birk, A.; Carpin, S. Merging Occupancy Grid Maps From Multiple Robots. Proc. IEEE 2006, 94, 1384–1397. [Google Scholar] [CrossRef]
- Wu, C.Y.; Lin, H.Y. Autonomous Mobile Robot Exploration in Unknown Indoor Environments Based on Rapidly-Exploring Random Tree. In Proceedings of the 2019 IEEE International Conference on Industrial Technology (ICIT), Melbourne, VIC, Australia, 13–15 February 2019; pp. 1345–1350. [Google Scholar] [CrossRef]
- Jin, Y. Multi-Robot Exploration and Path Planning Algorithms of Mobile Robots. Master’s Thesis, Xidian University, Xi’an, China, 2020. [Google Scholar]
- Zhang, L.; Lin, Z.; Wang, J.; He, B. Rapidly-exploring Random Trees multi-robot map exploration under optimization framework. Robot. Auton. Syst. 2020, 131, 103565. [Google Scholar] [CrossRef]
- Pimentel, J.M.; Alvim, M.S.; Campos, M.F.M.; Macharet, D.G. Information-Driven Rapidly-Exploring Random Tree for Efficient Environment Exploration. J. Intell. Robot. Syst. 2018, 91, 313–331. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ET (s) | PD Robot 1 (m) | PD Robot 2 (m) | PD Robot 3 (m) | Total PD (m) | |
|---|---|---|---|---|---|
| Mean Values | 168.75 | 15.10 | 23.86 | 17.54 | 56.50 |
| Std Dev | 1.2698 | 1.9450 | 2.3356 | 1.1087 | 9.1234 |
| Algorithm | ET (s) | Total PD (m) | PD (m) | Mean-PD | Std-PD |
|---|---|---|---|---|---|
| M-RRTs [8] | 244.21 | 110.30 | {32.49, 25.38, 52.43} | 36.7667 | 14.0229 |
| RRT-GFB [27] | 234.49 | 107.82 | {27.41, 34.87, 45.54} | 35.9400 | 9.1122 |
| RRT-BFS [28] | 202.10 | 97.34 | {26.28, 30.47, 40.59} | 32.4467 | 7.3569 |
| E-RRT [29] | 219.07 | 102.89 | {29.70, 27.52, 45.67} | 34.2967 | 9.9097 |
| ID-RRT [30] | 194.33 | 86.26 | {17.69, 25.01, 43.56} | 28.7533 | 13.3351 |
| HMS-RRT [15] | 144.18 | 67.28 | {21.33, 16.43, 29.52} | 22.4267 | 6.6135 |
| HMT | 168.75 | 56.50 | {15.10, 23.86, 17.54} | 18.8333 | 4.5209 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blounas, T.-F.; Bechlioulis, C.P. Multi-Robot Exploration Employing Harmonic Map Transformations. Appl. Sci. 2024, 14, 3215. https://doi.org/10.3390/app14083215
Blounas T-F, Bechlioulis CP. Multi-Robot Exploration Employing Harmonic Map Transformations. Applied Sciences. 2024; 14(8):3215. https://doi.org/10.3390/app14083215
Chicago/Turabian StyleBlounas, Taxiarchis-Foivos, and Charalampos P. Bechlioulis. 2024. "Multi-Robot Exploration Employing Harmonic Map Transformations" Applied Sciences 14, no. 8: 3215. https://doi.org/10.3390/app14083215
APA StyleBlounas, T.-F., & Bechlioulis, C. P. (2024). Multi-Robot Exploration Employing Harmonic Map Transformations. Applied Sciences, 14(8), 3215. https://doi.org/10.3390/app14083215