
Impacts of Variable Illumination and Image Background on Rice LAI Estimation Based on UAV RGB-Derived Color Indices

Abstract
:1. Introduction
2. Materials and Methods
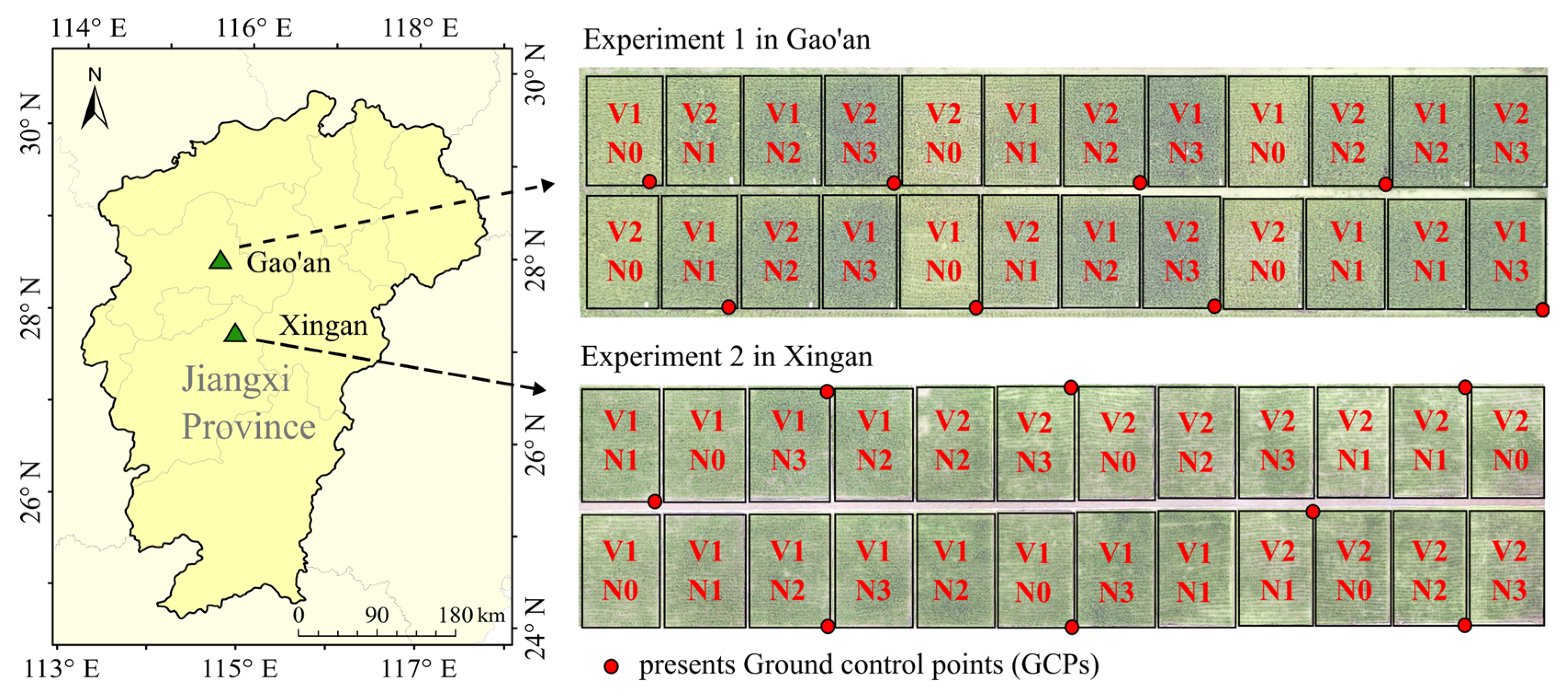
2.1. Site Description and Experimental Design
2.2. Data Collection
2.2.1. UAV-Based Data Collection
2.2.2. LAI Acquisition
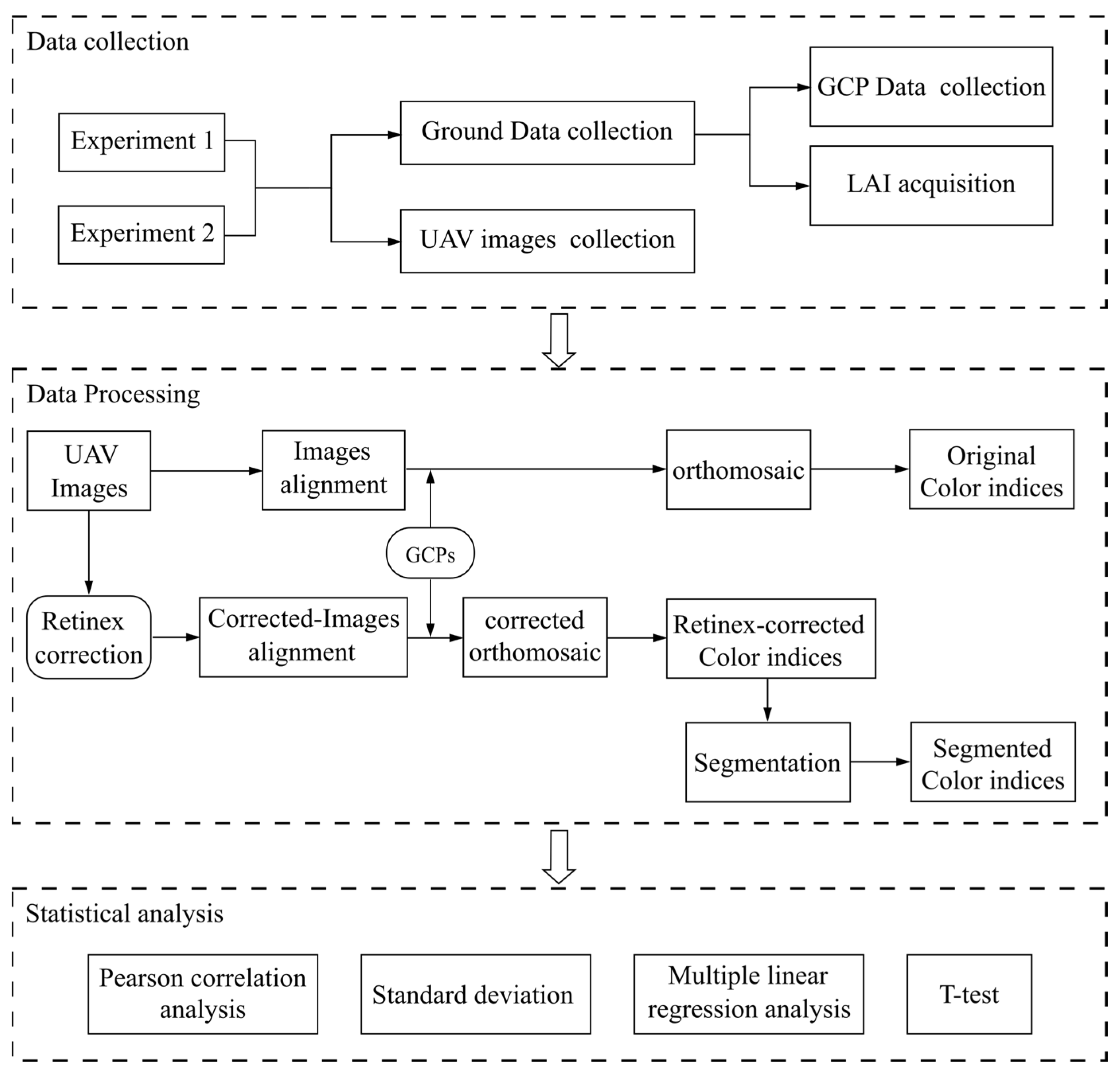
2.3. Data Processing
2.3.1. Image Mosaicking
2.3.2. Illumination Correction
2.3.3. Color Indices
2.3.4. Image Segmentation
2.4. Statistical Analysis
3. Results
3.1. Effects of Illumination on the Estimation of LAI
3.1.1. The Impact of Variable Illumination on CIs
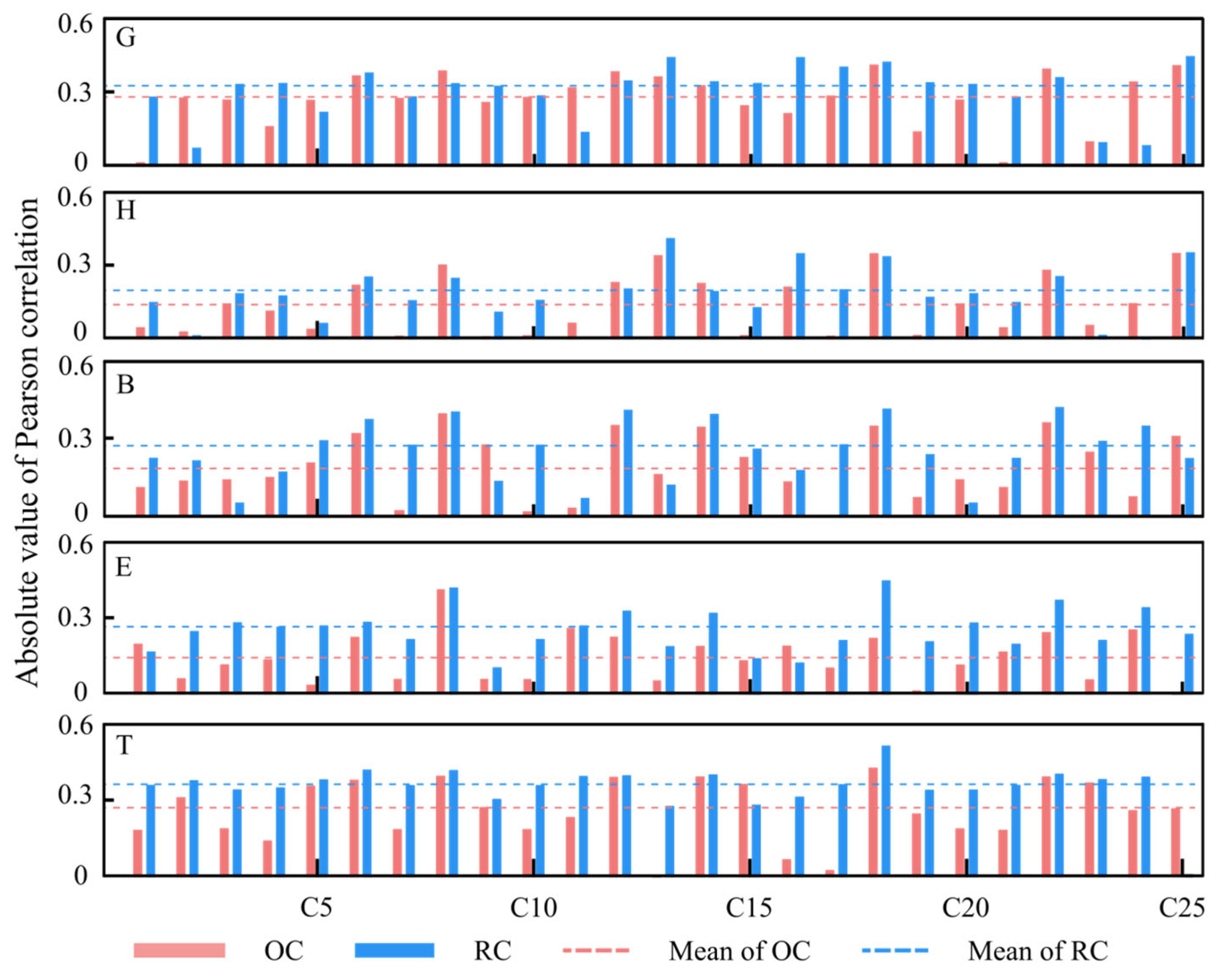
3.1.2. Correlation Analysis of CIs and LAI
3.1.3. Estimation of LAI by Regression Analysis of CIs
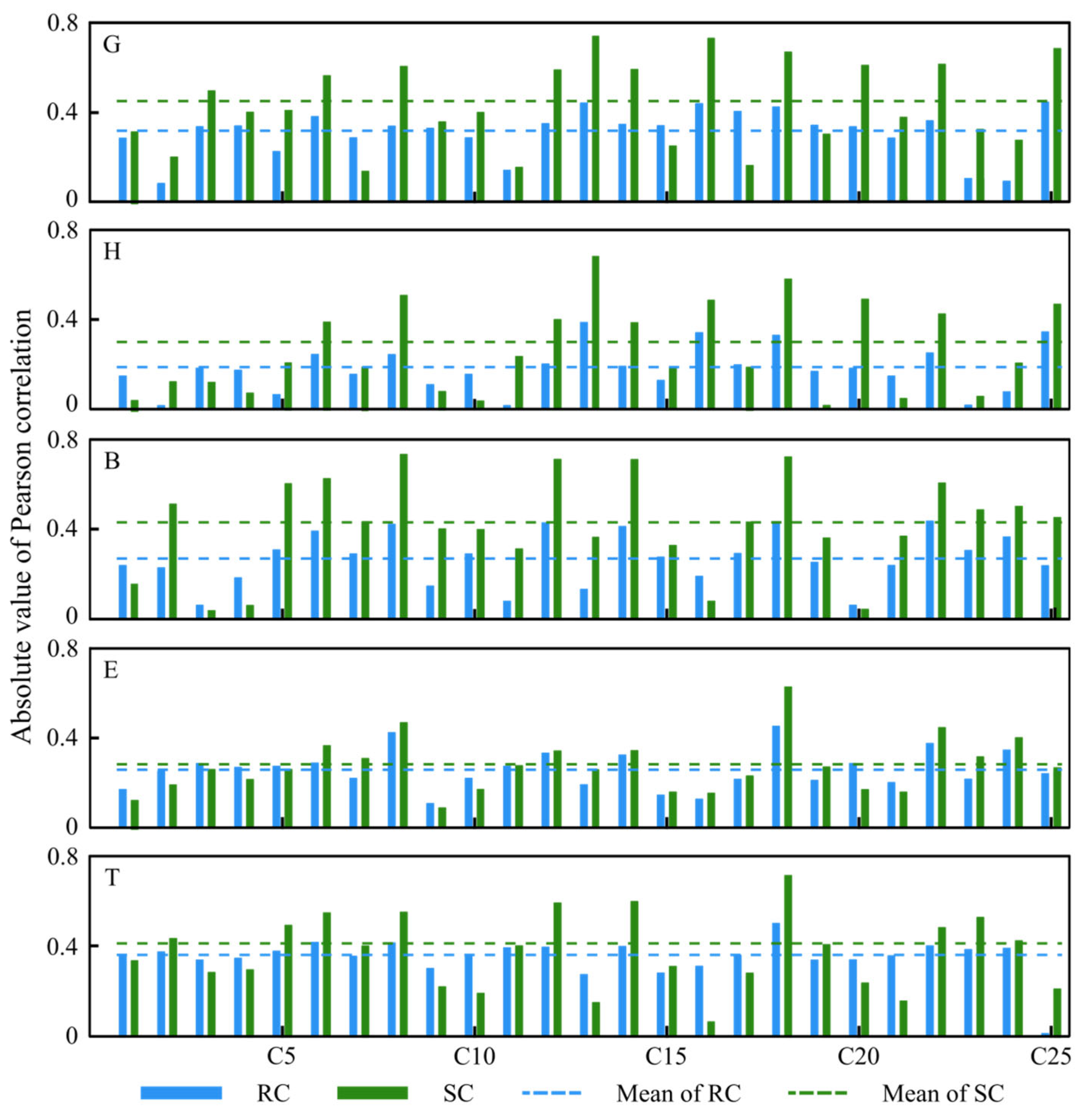
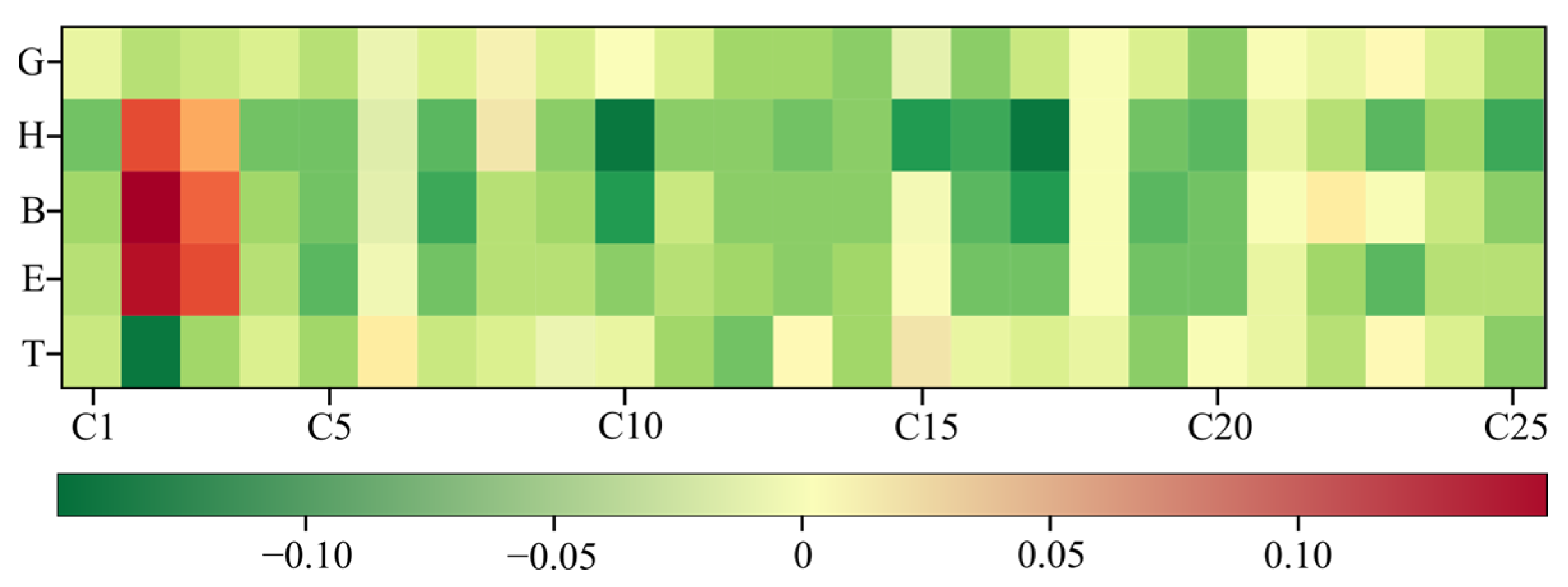
3.2. Effects of the Background on LAI Estimation
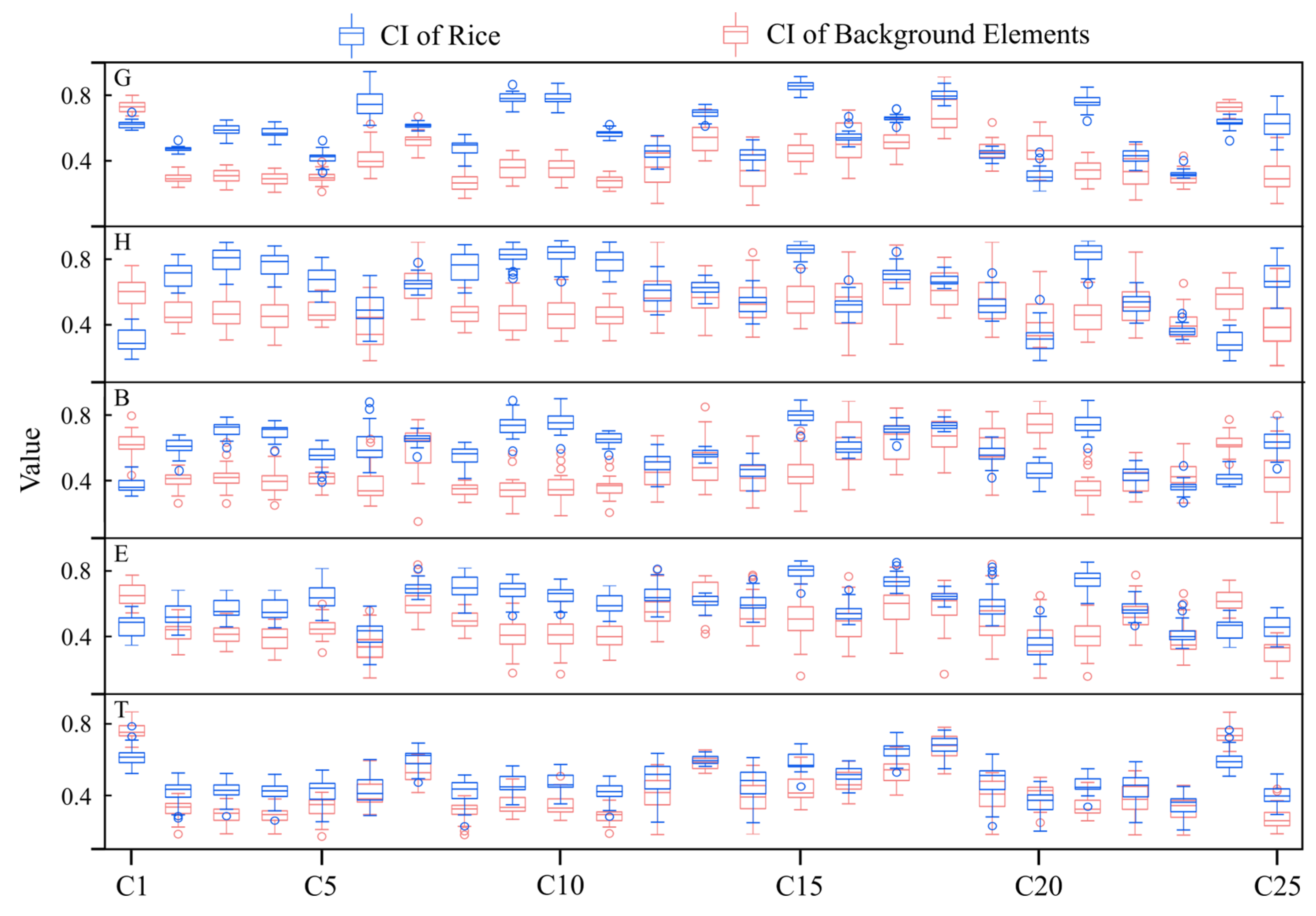
3.2.1. The Impact of Background on CIs
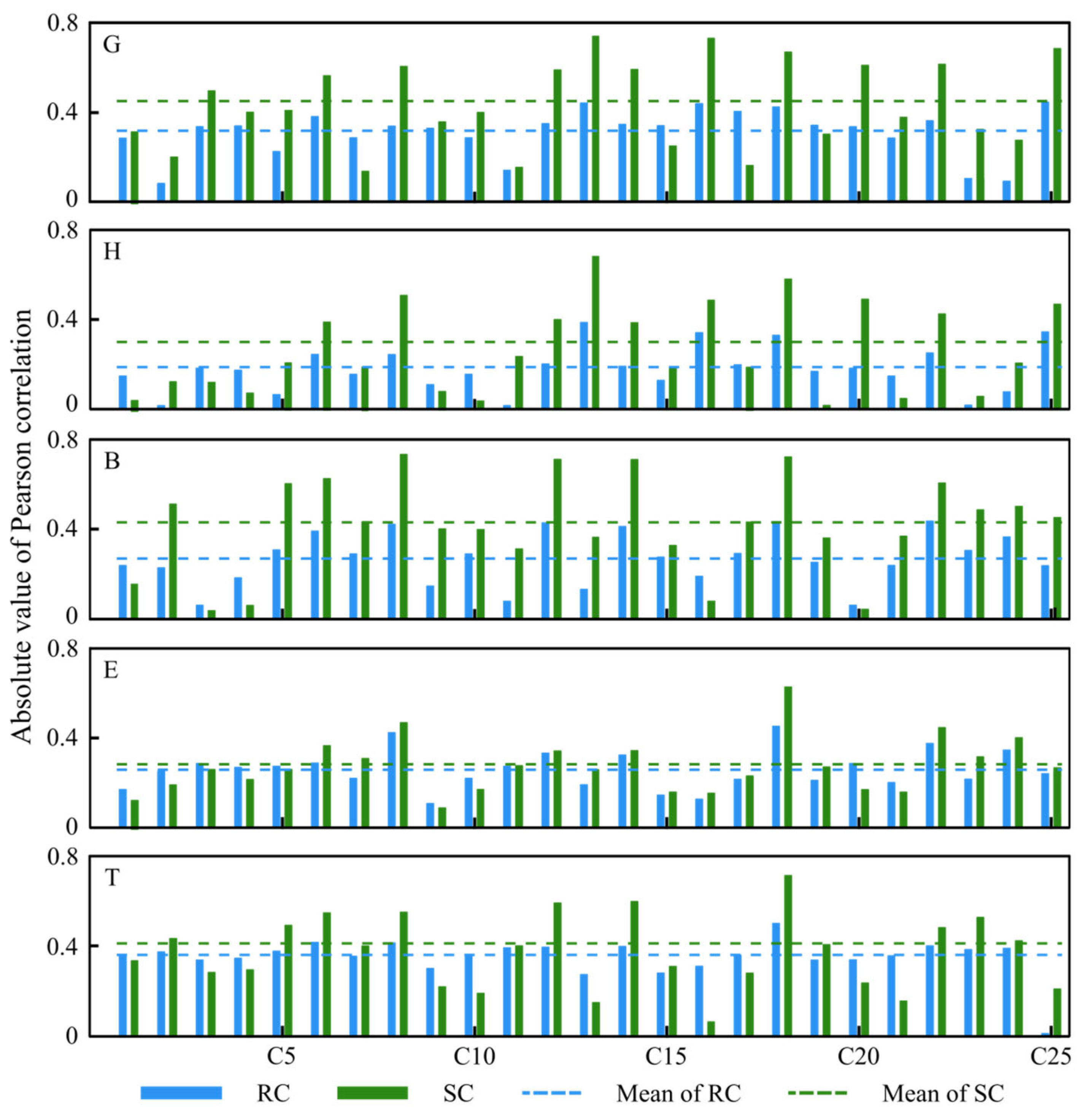
3.2.2. Correlation Analysis between CIs and LAI
3.2.3. Estimation of LAI by Regression Analysis of CIs
4. Discussion
4.1. Influence of Illumination on the Estimation of LAI
4.2. Influence of the Background on LAI Estimation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Muthayya, S.; Sugimoto, J.D.; Montgomery, S.; Maberly, G.F. An Overview of Global Rice Production, Supply, Trade, and Consumption. Ann. N. Y. Acad. Sci. 2014, 1324, 7–14. [Google Scholar] [CrossRef] [PubMed]
- Ren, D.; Ding, C.; Qian, Q. Molecular Bases of Rice Grain Size and Quality for Optimized Productivity. Sci. Bull. 2023, 68, 314–350. [Google Scholar] [CrossRef] [PubMed]
- Peng, S.; Khush, G.S.; Virk, P.; Tang, Q.; Zou, Y. Progress in Ideotype Breeding to Increase Rice Yield Potential. Field Crops Res. 2008, 108, 32–38. [Google Scholar] [CrossRef]
- Bréda, N.J.J. Ground-based Measurements of Leaf Area Index: A Review of Methods, Instruments and Current Controversies. J. Exp. Bot. 2003, 54, 2403–2417. [Google Scholar] [CrossRef]
- Xu, J.; Quackenbush, L.J.; Volk, T.A.; Im, J. Forest and Crop Leaf Area Index Estimation Using Remote Sensing: Research Trends and Future Directions. Remote Sens. 2020, 12, 2934. [Google Scholar] [CrossRef]
- Liu, X.; Cao, Q.; Yuan, Z.; Liu, X.; Wang, X.; Tian, Y.; Cao, W.; Zhu, Y. Leaf Area Index Based Nitrogen Diagnosis in Irrigated Lowland Rice. J. Integr. Agric. 2018, 17, 111–121. [Google Scholar] [CrossRef]
- Ilniyaz, O.; Du, Q.; Shen, H.; He, W.; Feng, L.; Azadi, H.; Kurban, A.; Chen, X. Leaf Area Index Estimation of Pergola-Trained Vineyards in Arid Regions Using Classical and Deep Learning Methods Based on UAV-Based RGB Images. Comput. Electron. Agric. 2023, 207, 107723. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Istiak, M.A.; Syeed, M.M.M.; Hossain, M.S.; Uddin, M.F.; Hasan, M.; Khan, R.H.; Azad, N.S. Adoption of Unmanned Aerial Vehicle (UAV) Imagery in Agricultural Management: A Systematic Literature Review. Ecol. Inform. 2023, 78, 102305. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Tanaka, Y.; Imachi, Y.; Yamashita, M.; Katsura, K. Feasibility of Combining Deep Learning and RGB Images Obtained by Unmanned Aerial Vehicle for Leaf Area Index Estimation in Rice. Remote Sens. 2020, 13, 84. [Google Scholar] [CrossRef]
- Bouguettaya, A.; Zarzour, H.; Kechida, A.; Taberkit, A.M. Deep Learning Techniques to Classify Agricultural Crops through UAV Imagery: A Review. Neural Comput. Appl. 2022, 34, 9511–9536. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Jin, X.; Nie, C.; Wang, S.; Yu, X.; Cheng, M.; Shao, M.; Wang, Z.; Tuohuti, N.; Bai, Y.; et al. Estimating Leaf Area Index Using Unmanned Aerial Vehicle Data: Shallow vs. Deep Machine Learning Algorithms. Plant Physiol. 2021, 187, 1551–1576. [Google Scholar] [CrossRef]
- Qiu, Z.; Ma, F.; Li, Z.; Xu, X.; Du, C. Development of Prediction Models for Estimating Key Rice Growth Variables Using Visible and NIR Images from Unmanned Aerial Systems. Remote Sens. 2022, 14, 1384. [Google Scholar] [CrossRef]
- Gong, Y.; Yang, K.; Lin, Z.; Fang, S.; Wu, X.; Zhu, R.; Peng, Y. Remote Estimation of Leaf Area Index (LAI) with Unmanned Aerial Vehicle (UAV) Imaging for Different Rice Cultivars throughout the Entire Growing Season. Plant Methods 2021, 17, 88. [Google Scholar] [CrossRef] [PubMed]
- Qiao, L.; Gao, D.; Zhao, R.; Tang, W.; An, L.; Li, M.; Sun, H. Improving Estimation of LAI Dynamic by Fusion of Morphological and Vegetation Indices Based on UAV Imagery. Comput. Electron. Agric. 2022, 192, 106603. [Google Scholar] [CrossRef]
- Verrelst, J.; Camps-Valls, G.; Muñoz-Marí, J.; Rivera, J.P.; Veroustraete, F.; Clevers, J.G.P.W.; Moreno, J. Optical Remote Sensing and the Retrieval of Terrestrial Vegetation Bio-Geophysical Properties—A Review. ISPRS J. Photogramm. Remote Sens. 2015, 108, 273–290. [Google Scholar] [CrossRef]
- Guo, X.; Wang, R.; Chen, J.M.; Cheng, Z.; Zeng, H.; Miao, G.; Huang, Z.; Guo, Z.; Cao, J.; Niu, J. Synergetic Inversion of Leaf Area Index and Leaf Chlorophyll Content Using Multi-Spectral Remote Sensing Data. Geo-Spat. Inf. Sci. 2023, 1–14. [Google Scholar] [CrossRef]
- Jiang, J.; Johansen, K.; Stanschewski, C.S.; Wellman, G.; Mousa, M.A.A.; Fiene, G.M.; Asiry, K.A.; Tester, M.; McCabe, M.F. Phenotyping a Diversity Panel of Quinoa Using UAV-Retrieved Leaf Area Index, SPAD-Based Chlorophyll and a Random Forest Approach. Precis. Agric. 2022, 23, 961–983. [Google Scholar] [CrossRef]
- Burdziakowski, P.; Bobkowska, K. UAV Photogrammetry under Poor Lighting Conditions—Accuracy Considerations. Sensors 2021, 21, 3531. [Google Scholar] [CrossRef]
- Arroyo-Mora, J.P.; Kalacska, M.; Løke, T.; Schläpfer, D.; Coops, N.C.; Lucanus, O.; Leblanc, G. Assessing the Impact of Illumination on UAV Pushbroom Hyperspectral Imagery Collected under Various Cloud Cover Conditions. Remote Sens. Environ. 2021, 258, 112396. [Google Scholar] [CrossRef]
- Hassanijalilian, O.; Igathinathane, C.; Doetkott, C.; Bajwa, S.; Nowatzki, J.; Haji Esmaeili, S.A. Chlorophyll Estimation in Soybean Leaves Infield with Smartphone Digital Imaging and Machine Learning. Comput. Electron. Agric. 2020, 174, 105433. [Google Scholar] [CrossRef]
- Wang, S.; Baum, A.; Zarco-Tejada, P.J.; Dam-Hansen, C.; Thorseth, A.; Bauer-Gottwein, P.; Bandini, F.; Garcia, M. Unmanned Aerial System Multispectral Mapping for Low and Variable Solar Irradiance Conditions: Potential of Tensor Decomposition. ISPRS J. Photogramm. Remote Sens. 2019, 155, 58–71. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Z.; Kootstra, G.; Khan, H.A. The Impact of Variable Illumination on Vegetation Indices and Evaluation of Illumination Correction Methods on Chlorophyll Content Estimation Using UAV Imagery. Plant Methods 2023, 19, 51. [Google Scholar] [CrossRef] [PubMed]
- Singh, K.K.; Frazier, A.E. A Meta-Analysis and Review of Unmanned Aircraft System (UAS) Imagery for Terrestrial Applications. Int. J. Remote Sens. 2018, 39, 5078–5098. [Google Scholar] [CrossRef]
- Svensgaard, J.; Jensen, S.M.; Westergaard, J.C.; Nielsen, J.; Christensen, S.; Rasmussen, J. Can Reproducible Comparisons of Cereal Genotypes Be Generated in Field Experiments Based on UAV Imagery Using RGB Cameras? Eur. J. Agron. 2019, 106, 49–57. [Google Scholar] [CrossRef]
- Bai, X.; Cao, Z.; Wang, Y.; Yu, Z.; Hu, Z.; Zhang, X.; Li, C. Vegetation Segmentation Robust to Illumination Variations Based on Clustering and Morphology Modelling. Biosyst. Eng. 2014, 125, 80–97. [Google Scholar] [CrossRef]
- Zheng, H.; Cheng, T.; Zhou, M.; Li, D.; Yao, X.; Tian, Y.; Cao, W.; Zhu, Y. Improved Estimation of Rice Aboveground Biomass Combining Textural and Spectral Analysis of UAV Imagery. Precis. Agric. 2019, 20, 611–629. [Google Scholar] [CrossRef]
- Ren, H.; Zhou, G.; Zhang, F. Using Negative Soil Adjustment Factor in Soil-Adjusted Vegetation Index (SAVI) for Aboveground Living Biomass Estimation in Arid Grasslands. Remote Sens. Environ. 2018, 209, 439–445. [Google Scholar] [CrossRef]
- Hamuda, E.; Glavin, M.; Jones, E. A Survey of Image Processing Techniques for Plant Extraction and Segmentation in the Field. Comput. Electron. Agric. 2016, 125, 184–199. [Google Scholar] [CrossRef]
- Suh, H.K.; Hofstee, J.W.; Van Henten, E.J. Investigation on Combinations of Colour Indices and Threshold Techniques in Vegetation Segmentation for Volunteer Potato Control in Sugar Beet. Comput. Electron. Agric. 2020, 179, 105819. [Google Scholar] [CrossRef]
- Castillo-Martínez, M.Á.; Gallegos-Funes, F.J.; Carvajal-Gámez, B.E.; Urriolagoitia-Sosa, G.; Rosales-Silva, A.J. Color Index Based Thresholding Method for Background and Foreground Segmentation of Plant Images. Comput. Electron. Agric. 2020, 178, 105783. [Google Scholar] [CrossRef]
- Corti, M.; Cavalli, D.; Cabassi, G.; Marino Gallina, P.; Bechini, L. Does Remote and Proximal Optical Sensing Successfully Estimate Maize Variables? A Review. Eur. J. Agron. 2018, 99, 37–50. [Google Scholar] [CrossRef]
- Shi, P.; Wang, Y.; Xu, J.; Zhao, Y.; Yang, B.; Yuan, Z.; Sun, Q. Rice Nitrogen Nutrition Estimation with RGB Images and Machine Learning Methods. Comput. Electron. Agric. 2021, 180, 105860. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, D.; Zhang, G.; Wang, J. Estimating Nitrogen Status of Rice Using the Image Segmentation of G-R Thresholding Method. Field Crops Res. 2013, 149, 33–39. [Google Scholar] [CrossRef]
- Sun, B.; Ye, C.; LI, Y.; Shu, S.; Cao, Z.; Wu, L.; Zhu, Y.; He, Y. Paddy Filed Image Segmentation Based on Color Indices and Thresholding Method. J. China Agric. Univ. 2022, 27, 86–95. [Google Scholar]
- Zheng, H.; Zhou, X.; He, J.; Yao, X.; Cheng, T.; Zhu, Y.; Cao, W.; Tian, Y. Early Season Detection of Rice Plants Using RGB, NIR-G-B and Multispectral Images from Unmanned Aerial Vehicle (UAV). Comput. Electron. Agric. 2020, 169, 105223. [Google Scholar] [CrossRef]
- Barbedo, J. A Review on the Use of Unmanned Aerial Vehicles and Imaging Sensors for Monitoring and Assessing Plant Stresses. Drones. 2019, 3, 40. [Google Scholar] [CrossRef]
- Teixeira Crusiol, L.G.; Nanni, M.R.; Furlanetto, R.H.; Cezar, E.; Silva, G.F.C. Reflectance Calibration of UAV-Based Visible and near-Infrared Digital Images Acquired under Variant Altitude and Illumination Conditions. Remote Sens. Appl. Soc. Environ. 2020, 18, 100312. [Google Scholar] [CrossRef]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially Located Platform and Aerial Photography for Documentation of Grazing Impacts on Wheat. Geocarto Int. 2001, 16, 65–70. [Google Scholar] [CrossRef]
- Burgos-Artizzu, X.P.; Ribeiro, A.; Guijarro, M.; Pajares, G. Real-Time Image Processing for Crop/Weed Discrimination in Maize Fields. Comput. Electron. Agric. 2011, 75, 337–346. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-Based Plant Height from Crop Surface Models, Visible, and near Infrared Vegetation Indices for Biomass Monitoring in Barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Woebbecke, D.M.; Meyer, G.E.; Von Bargen, K.; Mortensen, D.A. Color Indices for Weed Identification Under Various Soil, Residue, and Lighting Conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Wahono, W.; Indradewa, D.; Sunarminto, B.H.; Haryono, E.; Prajitno, D. CIE L*a*b* Color Space Based Vegetation Indices Derived from Unmanned Aerial Vehicle Captured Images for Chlorophyll and Nitrogen Content Estimation of Tea (Camellia sinensis L. Kuntze) Leaves. Ilmu Pertan. Agric. Sci. 2019, 4, 46. [Google Scholar] [CrossRef]
- Sulik, J.J.; Long, D.S. Spectral Considerations for Modeling Yield of Canola. Remote Sens. Environ. 2016, 184, 161–174. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel Algorithms for Remote Estimation of Vegetation Fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef]
- Hague, T.; Tillett, N.D.; Wheeler, H. Automated Crop and Weed Monitoring in Widely Spaced Cereals. Precis. Agric. 2006, 7, 21–32. [Google Scholar] [CrossRef]
- Guijarro, M.; Pajares, G.; Riomoros, I.; Herrera, P.J.; Burgos-Artizzu, X.P.; Ribeiro, A. Automatic Segmentation of Relevant Textures in Agricultural Images. Comput. Electron. Agric. 2011, 75, 75–83. [Google Scholar] [CrossRef]
- Wendel, A.; Underwood, J. Illumination Compensation in Ground Based Hyperspectral Imaging. ISPRS J. Photogramm. Remote Sens. 2017, 129, 162–178. [Google Scholar] [CrossRef]
- Lee, R.L.; Hernández-Andrés, J. Colors of the Daytime Overcast Sky. Appl. Opt. 2005, 44, 5712. [Google Scholar] [CrossRef]
- Zhao, D.; Yang, T.; An, S. Effects of Crop Residue Cover Resulting from Tillage Practices on LAI Estimation of Wheat Canopies Using Remote Sensing. Int. J. Appl. Earth Obs. Geoinf. 2012, 14, 169–177. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Location | Stage | Sampling Data | Weather Condition |
|---|---|---|---|---|
| Experiment 1 2019–2020 | Gao’an | Tillering | 11 May 2019 | Sunny (not cloudy) |
| 11 May 2020 | Partly cloudy | |||
| Elongation | 23 May 2019 | Sunny (not cloudy) | ||
| 20 May 2020 | Sunny (not cloudy) | |||
| Booting | 04 June 2019 | Partly cloudy | ||
| 28 May 2020 | Sunny (not cloudy) | |||
| Heading | 11 June 2019 | Sunny (not cloudy) | ||
| 09 June 2019 | Partly cloudy | |||
| Grouting | 22 June 2019 | Partly cloudy | ||
| 23 June 2019 | Partly cloudy | |||
| Experiment 2 2019 | Xingan | Tillering | 15 May 2019 | Sunny (not cloudy) |
| Elongation | 22 May 2019 | Partly cloudy | ||
| Booting | 03 June 2019 | Partly cloudy | ||
| Heading | 11 June 2019 | Partly cloudy | ||
| Grouting | 24 June 2019 | Overcast |
| Index | Name | Definition | Reference |
|---|---|---|---|
| C1 | Color index of vegetation extraction (CIVE) | 0.441R − 0.881G + 0.385B + 18.78745 | [31] |
| C2 | Combination of green 1 (COM1) | ExG + CIVE + ExGR + VEG | [29] |
| C3 | Combination of green 2 (COM2) | 0.36ExG + 0.47CIVE + 0.17VEG | [29] |
| C4 | Excess green (EXG) | 2G − B − R | [29] |
| C5 | Excess green minus excess red (EXGR) | 3G − 2.4R − B | [29] |
| C6 | Excess red (EXR) | 1.4R-G | [29] |
| C7 | Green leaf index (GLI) | (2G − R − B)/(2G + R+ B) | [39] |
| C8 | Green minus red index (GMR) | G − R | [34] |
| C9 | Color intensity index (INT) | (R + G + B)/3 | [34] |
| C10 | L* component of CIE L*a*b* color spaces | L* | |
| C11 | Modified excess green index (MExG) | 1.262G − 0.884R − 0.311B | [40] |
| C12 | Modified green–red vegetation index (MGRVI) | (G2 − B2)/(G2 + B2) | [41] |
| C13 | Normalized blueness intensity (NBI) | B/(R + G + B) | [34] |
| C14 | Normalized difference index (NDI) | 128((G − R)/(G + R) + 1) | [42] |
| C15 | Normalized difference L*b* index (NDLBI) | (L* − b*)/(L* + b*) | [43] |
| C16 | Normalized green–blue difference index (NGBDI) | (G − B)/(G + B) | [44] |
| C17 | Normalized greenness intensity (NGI) | G/(R + G + B) | [34] |
| C18 | Normalized redness intensity (NRI) | R/(R + G + B) | [34] |
| C19 | Red–green–blue vegetation index (RGBVI) | (G2 − RB)/(G2 + RB) | [41] |
| C20 | Saturation (S) | S | |
| C21 | Value refers to the brightness of the color | V | |
| C22 | Visible atmospherically resistant index (VARI) | (G − R)/(G + R − B) | [45] |
| C23 | Vegetative index (VEG) | G/(RαB(1 − α)) | [46] |
| C24 | a* component of CIE L*a*b* color spaces | a* | |
| C25 | b* component of CIE L*a*b* color spaces | b* |
| Stage | Original CIs | Retinex-Corrected CIs | Segmented CIs |
|---|---|---|---|
| Tillering | 0.47 | 0.57 | 0.64 |
| Elongation | 0.31 | 0.50 | 0.58 |
| Booting | 0.38 | 0.52 | 0.63 |
| Heading | 0.33 | 0.51 | 0.60 |
| Grouting | 0.46 | 0.55 | 0.61 |
| CIs | Tillering | Elongation | Booting | Heading | Grouting |
|---|---|---|---|---|---|
| C1 | −8.098 ** | −9.641 ** | −6.951 ** | −6.716 ** | −9.719 ** |
| C2 | 6.007 ** | 7.835 ** | 6.148 ** | 5.495 ** | 5.118 ** |
| C3 | 8.574 ** | 9.865 ** | 6.839 ** | 6.859 ** | 8.886 ** |
| C4 | 8.509 ** | 9.723 ** | 6.708 ** | 6.848 ** | 9.78 ** |
| C5 | 4.415 ** | 6.435 ** | 3.805 ** | 3.956 ** | 2.036 * |
| C6 | 1.146 | 2.145* | 3.434 ** | 4.195 ** | 5.179 ** |
| C7 | 4.550 ** | 3.508 ** | 1.506 | 0.467 | 1.531 |
| C8 | 6.083 ** | 8.847 ** | 7.583 ** | 5.725 ** | 3.827 ** |
| C9 | 3.470 ** | 6.568 ** | 6.847 ** | 7.080 ** | 11.185 ** |
| C10 | 4.101 ** | 7.181 ** | 6.842 ** | 7.081 ** | 11.044 ** |
| C11 | 8.716 ** | 10.317 ** | 8.399 ** | 7.581 ** | 11.303 ** |
| C12 | 3.265 ** | 3.46 ** | 1.1 | 0.372 | 0.159 |
| C13 | 2.473 * | 1.221 | 1.396 | 1.406 ** | 1.885 ** |
| C14 | 3.051 ** | 2.369 * | 0.776 | −0.168 | −0.142 |
| C15 | 4.823 ** | 6.638 ** | 6.464 ** | 6.176 ** | 11.352 ** |
| C16 | 2.866 ** | 2.526 * | −1.233 | −0.464 | −2.390 * |
| C17 | 3.266 ** | 6.471 ** | 1.894 | 2.143 * | 2.793 ** |
| C18 | 0.738 | 2.615 * | 1.868 | 2.163 * | 2.042 * |
| C19 | 3.106 ** | 3.173 ** | −3.21 ** | −0.691 | −3.752 ** |
| C20 | −1.984 | 0.038 | −7.274 ** | −3.552 ** | −5.415 ** |
| C21 | 4.224 ** | 7.565 ** | 7.312 ** | 7.655 ** | 11.146 ** |
| C22 | 2.900 ** | 1.106 | 0.622 | 0.062 | −0.044 |
| C23 | 1.620 ** | 0.146 | −2.257 ** | −1.955 | −3.755 ** |
| C24 | −7.669 ** | −9.385 ** | −8.219 ** | −6.752 ** | −9.043 ** |
| C25 | 7.467 ** | 8.009 * | 8.170 ** | 3.564 ** | 4.443 ** |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, B.; Li, Y.; Huang, J.; Cao, Z.; Peng, X. Impacts of Variable Illumination and Image Background on Rice LAI Estimation Based on UAV RGB-Derived Color Indices. Appl. Sci. 2024, 14, 3214. https://doi.org/10.3390/app14083214
Sun B, Li Y, Huang J, Cao Z, Peng X. Impacts of Variable Illumination and Image Background on Rice LAI Estimation Based on UAV RGB-Derived Color Indices. Applied Sciences. 2024; 14(8):3214. https://doi.org/10.3390/app14083214
Chicago/Turabian StyleSun, Binfeng, Yanda Li, Junbao Huang, Zhongsheng Cao, and Xinyi Peng. 2024. "Impacts of Variable Illumination and Image Background on Rice LAI Estimation Based on UAV RGB-Derived Color Indices" Applied Sciences 14, no. 8: 3214. https://doi.org/10.3390/app14083214