4.1. Numerical Analysis Using Simulated Data
The detection of imbalances and shaft bowing in Jeffcott rotor systems is an immensely significant task within numerous industrial domains. To tackle this challenge, the use of ANN models has proven to be highly effective. Our investigation commenced by employing an FNN that comprised multiple hidden layers, an input layer, and an output layer, all lacking feedback connections or loops [
46].
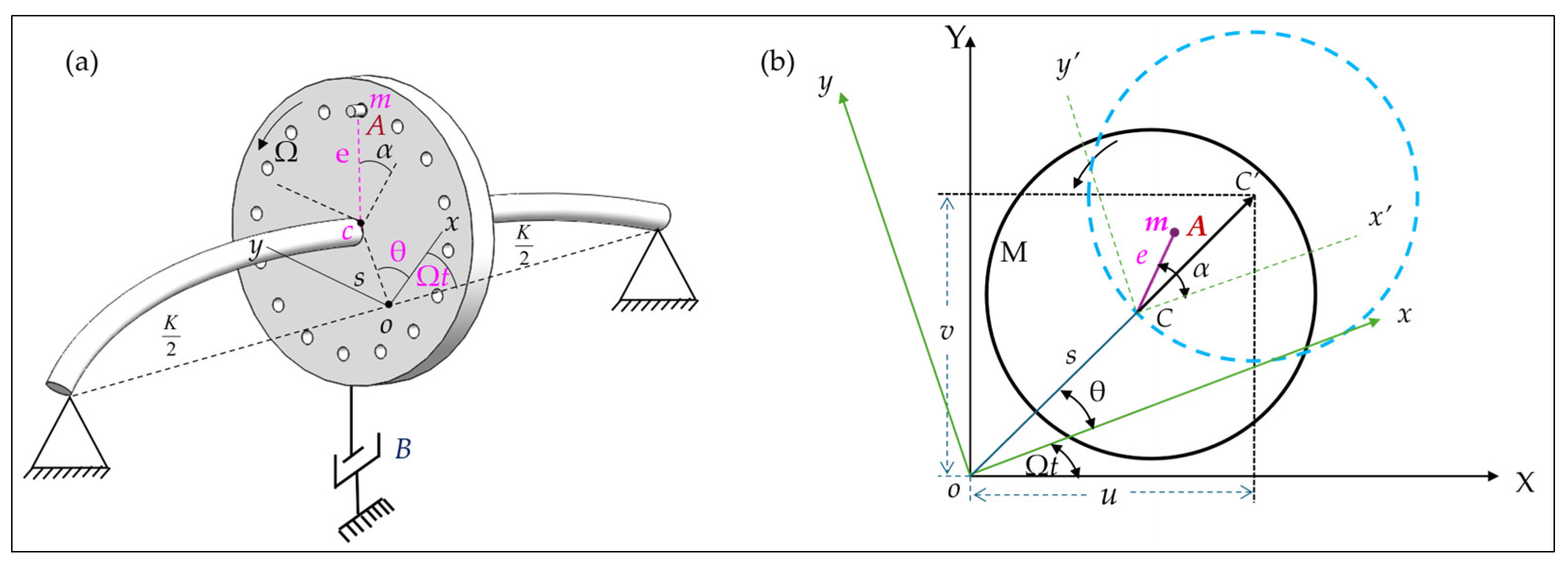
In the context of diagnosing multiple faults, the input layer adeptly receives the vibration signals or response components originating from the horizontal and vertical directions of the Jeffcott rotor system. Subsequently, these signals are skillfully processed by the neurons residing within the concealed layers, which judiciously employ activation functions such as the tan-sigmoid function or the rectified linear unit (ReLU) function. The outcome obtained from the hidden layer is then skillfully mapped to the ultimate output through the neurons residing within the output layer. It is worth noting that the output layer typically employs a linear transfer function, such as the purelin transfer function, to carry out this mapping process.
To train the FNN, 10,000 datasets are randomly generated, and 70% of them are used for training, 15% for validation, and the last 15% for testing. The Levenberg–Marquardt backpropagation (LM) training algorithm, specifically the
trainlm training function in MATLAB, was employed to train the network. To determine the most suitable number of hidden nodes, a trial-and-error approach was employed, as there is no precise method that can be used to select this parameter based solely on the number of inputs and outputs. However, in many ANN applications, including for FNNs applied to rotor systems, a single hidden layer has been proven sufficient [
37,
47]. Once the FNN is trained, it can be used to accurately detect and diagnose imbalances and shaft bowing in Jeffcott rotor systems based on the input vibration signals.
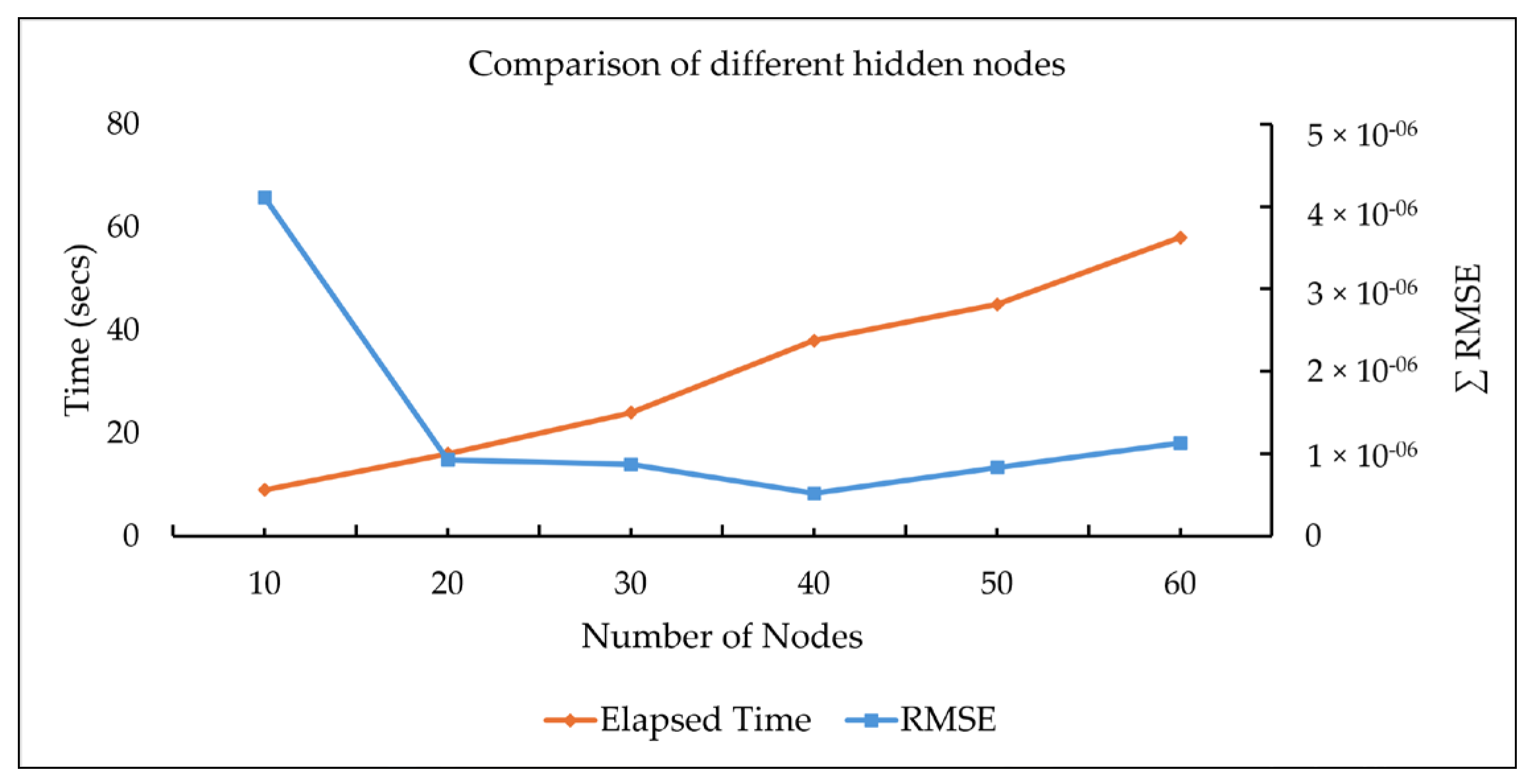
To examine the performance of the models, networks were trained with 10, 20, 30, 40, 50, and 60 hidden nodes. The results of the study revealed that a single hidden layer with 40 nodes had the lowest RMSE, as shown in
Figure 4. The number of errors drops rapidly and reaches the minimum for the configuration involving 40 nodes. The elapsed time periods vary with the node number, as also shown in
Figure 4, and it can be seen that the time increases almost linearly with the number of nodes. The errors of the testing set were reported in
Table 1 in terms of (
Ux,
Uy,
sx,
sy) rather than (
U,
s,
α,
θ), because the phase angle values (
α and
θ) did not align accurately because of their periodic nature. This change was made to mitigate concerns regarding potentially misleading outcomes. In
Table 1, the lowest numbers of errors for the four components all occur with 40 nodes.
During our investigation of the performance of the FNN using simulated data, we proposed a variety of fault conditions so that the diagnosis accuracy rates could be observed and compared. Different fault combinations can be classified as imbalance-dominant, shaft-bowing-dominant, and equal. When the imbalance dominates, the U values range from 0.6 to 0.9 kg·m and the s values from 0.5 to 0.1 mm. This means that the imbalance component is 100 times the shaft bowing component. In contrast, shaft bowing dominance involves U values ranging from 0.00001 to 0.00002 kg·m and s values ranging from 2 to 3 mm, opposing the imbalance scenario. The U and s parameters vary from 0.002 to 0.003 kg·m and 2 to 3 mm, respectively, in the equal case.
In addition, the effects of imbalances and shaft bowing vary with the rotational speed. The FNN performance results under three different operational ranges, namely sub-critical speed (τ < 1), near-critical speed (τ ≈ 1), and trans-critical speed (τ > 1), were also investigated. The RMSE was used as the metric for the performance evaluation in each scenario, and lower RMSE values indicate better performance or closer alignment with the FNN predictions.
The data illustrated in
Table 2 demonstrate the performance of the FNN across various fault dominations at different speeds. Let us first look at the third column for the imbalance-dominant case, where it can be observed that the estimated error sum of the FNN is the lowest (green face) when running at near-critical speed
τ ≈ 1, then
τ > 1 and
τ < 1. The identification error sum of the shaft bowing case, however, exhibits no significant differences for the different speed ranges. For the cases that are shaft-bowing-dominant, there are no significant differences in imbalance and bowing estimation errors under various speeds. When these two faults are of equal weight, the lowest estimation errors for imbalances and shaft bowing happen in different speed regions. Imbalances are best identified at
τ > 1, while the bowing identification process shows the lowest error with the rotor running at
τ < 1.
From the results shown above, it can be concluded that imbalances are better diagnosed at higher speeds (
τ ≈ 1 or
τ > 1), while the shaft bowing is better diagnosed at lower speeds (
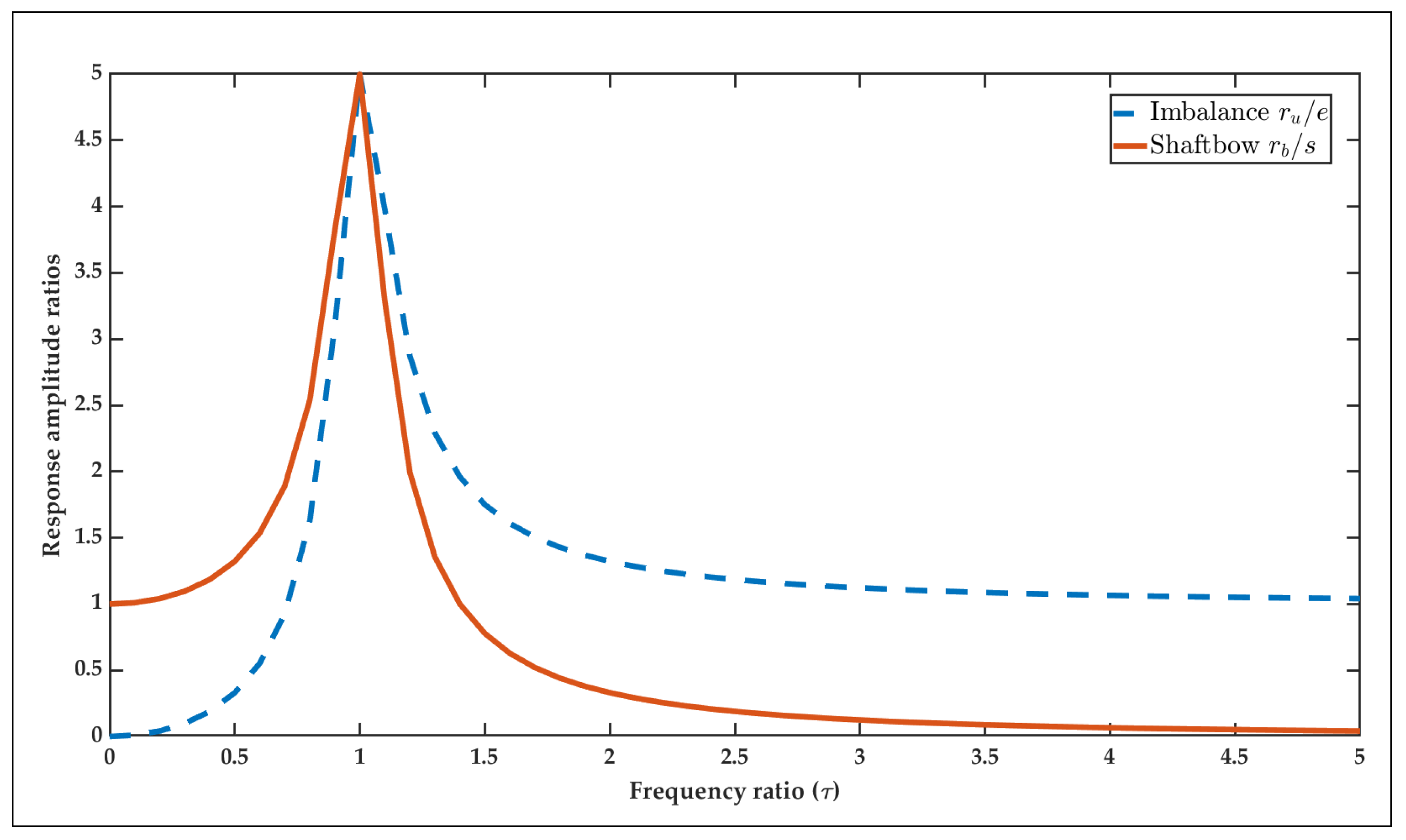
τ < 1). This conclusion can be explained and verified using the frequency responses of these two types of faults, as shown in
Figure 5. In this figure, it can clearly be seen that the imbalance response is significantly magnified at higher speeds, while conversely the shaft bowing response diminishes with increasing speeds. In other words, shaft bowing dominates at sub-critical speeds and imbalances take over after the critical speed is reached. Both reach their maximum response at near-critical speeds.
Moreover, in
Table 2, it is noteworthy that the equal scenario case exhibits much smaller RMSE values than the others for both the imbalance and shaft bowing faults. This means that the FNN diagnosis of the simultaneous imbalance and shaft bowing faults would be the most accurate when the shaft bowing and imbalance faults are not unduly dominant.
Damping is another factor that affects the response amplitude and phase. In most rotor-bearing systems, the damping ratio is relatively low. Nevertheless, to look into the damping effect in depth, cases with equal fault–weight ratios but with different damping ratios (underdamped, critically damped, and overdamped) were tested at sub-critical speeds (
τ < 1). The diagnosis accuracy results for the fault components are shown in
Table 3 as RMSE values.
As seen in
Table 3, the RMSEs all fall in the order of 10
−5 and the effects of the damping on the accuracy are not significant.
4.2. Experimental Verification and Real-Time Diagnosis
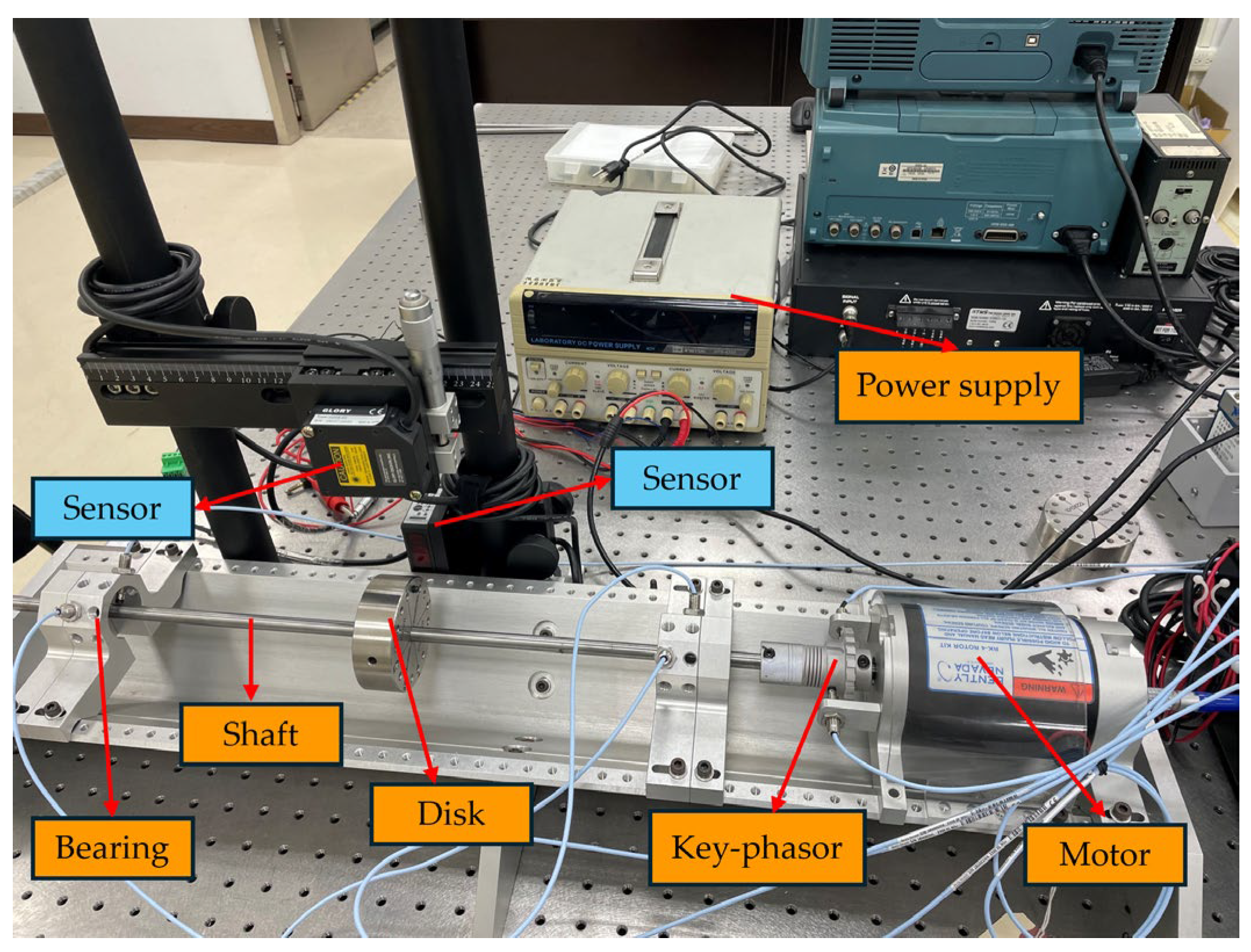
The model RK 4 Bently Nevada experimental rig depicted in
Figure 6 was used for the rotor fault experiment. This consisted of a motor attached to a single-disk rotor. The motor ran counterclockwise as viewed from the motor side. The rotor shaft was upheld by simple, identical bearings of an unknown stiffness. The diameter of the rotor shaft was 10 mm. A disk of 75 mm in diameter and 800 g in mass was mounted on the rotor shaft by radial screws. There were 16 tapped holes symmetrically placed on each side of the disk with flat faces at
e = 30 mm to attach any desired amount of imbalance mass. Memstec Glory Laser CD3S-30 and CD3S-50 sensors were precisely positioned on the corresponding disk along the X and Y axes, which were positioned at a separation angle of 90 degrees. After installation, the sensors were integrated into the power supply system to ensure a reliable and uninterrupted power source to ease the measurement operation.
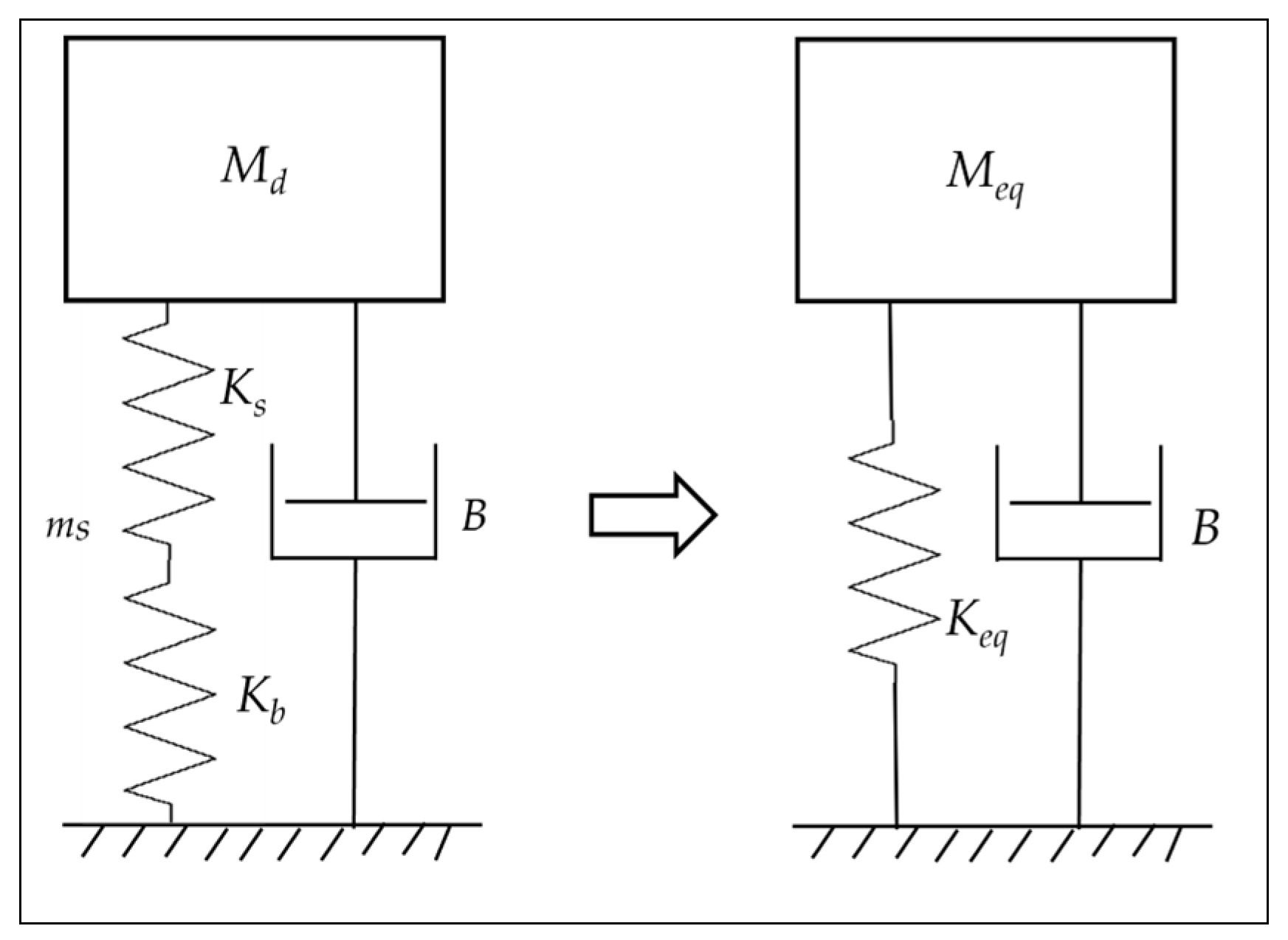
The rotor in the study encountered flexible support conditions, whereby the stiffness and damping coefficients were determined by the combination of the shaft and bearing components in the rotor system, as shown in
Figure 7. The support stiffness consisted of the combination of
Ks (shaft stiffness) and
Kb (bearing stiffness). It is important to acknowledge that the mass of the shaft,
ms, cannot be ignored and it must be lumped into a certain fraction with the mass of the disk,
Md. To determine the amount of shaft mass to be lumped with the disk mass, calculations can be carried out using an equivalent system. This entails establishing an equivalent system by analyzing the total kinetic energy (KE) of the shaft under the assumption of vibration in the static deflection mode.
Subsequently, the effective mass of the shaft that should be lumped onto the disk is 0.48 ms. Additionally, the mass of the disk (Md) is increased by 0.48 ms. Therefore, the value of Meq would be 0.96 kg.
The system’s overall stiffness is determined by the series connection of the shaft and the bearings, as shown in
Figure 7. The stiffness of the shaft under simple supports can be easily calculated to be
Ks = (48EI/L3). Nonetheless, the bearing stiffness
Kb is difficult to calculate theoretically; therefore, a practical approach is used to run the rotor experimentally to identify its critical speed (
ωcr), which was found to be 2300 rpm for the present case. The identified system critical speed
can be used in reverse to evaluate the bearing stiffness
Kb.
The critical speeds associated with X and Y vibrations for an asymmetric rotor are different. However, the asymmetry in the rotor rig is too small to be differentiable in the vibration measurements. While evaluating the critical speeds, it was assumed that the first recorded critical speed pertains to the Y direction. Additionally, it was noted that the critical speed in the X direction, as referenced in prior research [
48], is approximately 5% greater than in the Y direction.
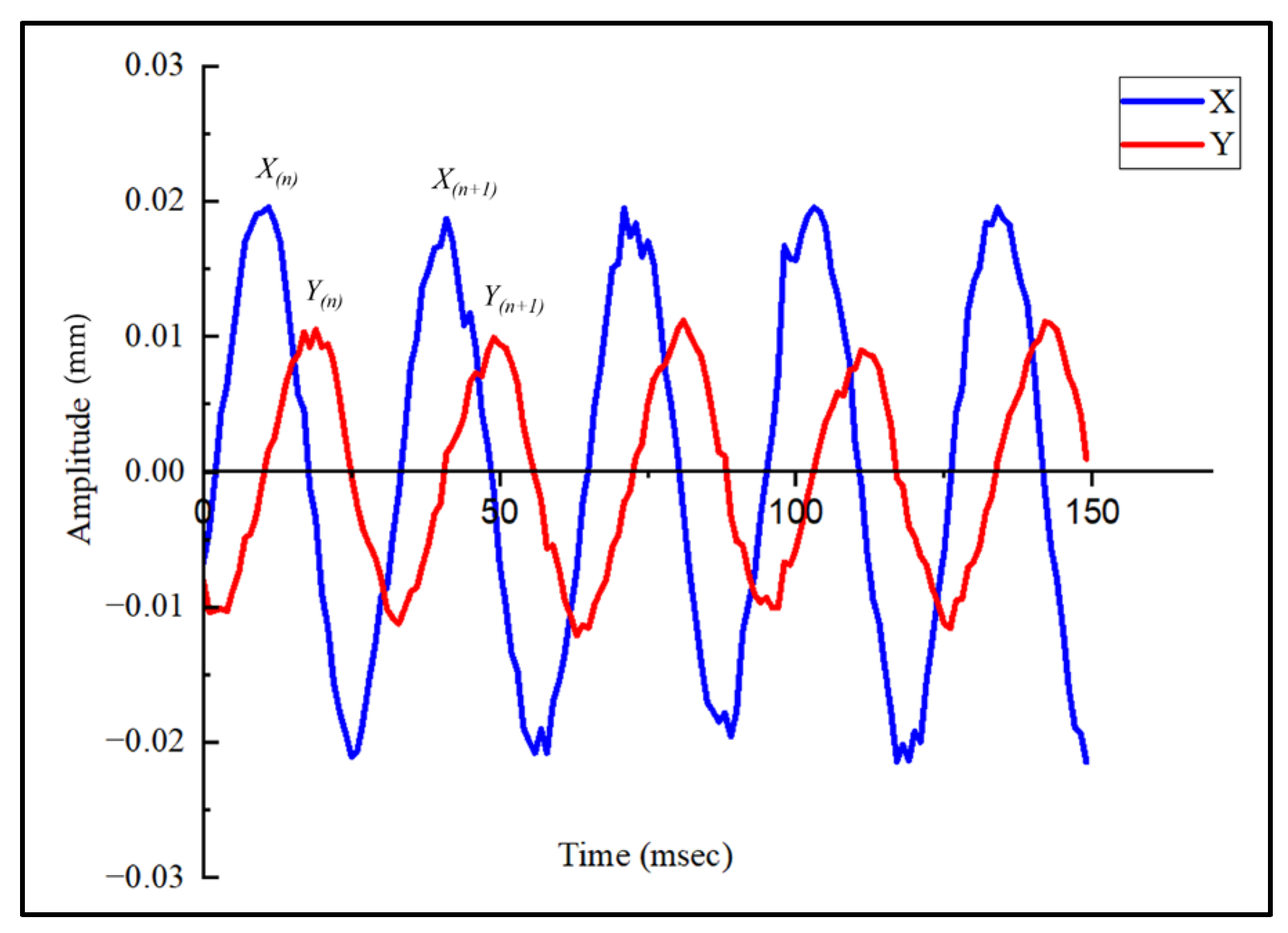
The damping ratios in the X and Y directions of the fundamental (1st) mode can be calculated using the logarithmic decrement (LD) from the measured transient response after shutting down the motor from steady operation, as shown in
Figure 8. Nevertheless, the LD is designed for a simple 1-dof vibratory system. The shaft-disk-bearing system on the test rig, however, contains an infinite number of modes. The participation of higher modes in the transient response inevitably interferes with the fundamental wave, as seen in the saw-toothed waves. The rotor involves light damping, such that a slight interference at the peak will make the succeeding peak greater than the previous. To avoid the noise from higher frequencies, we picked two adjacent waves with the least interference in the peaks and smoothed them out for the damping calculation. The values obtained after averaging for
ζx and
ζy were 0.5% and 0.47%, respectively.
Table 4 summarizes all model parameters of the rotor-bearing system in the test rig.
The experimental rotor was connected to a computer, enabling the acquisition of data via sensors, which were then analyzed using LabVIEW Version 20.0.1f1 (32-bit) software. The rotor’s vibration signals were recorded by the sensors located on the rotor disk, measuring the vibrations in both the X and Y axes. The rotor was subjected to single-frequency excitation and the steady state response, as expected, showed an almost simple harmonic wave, unlike the transient response in
Figure 8.
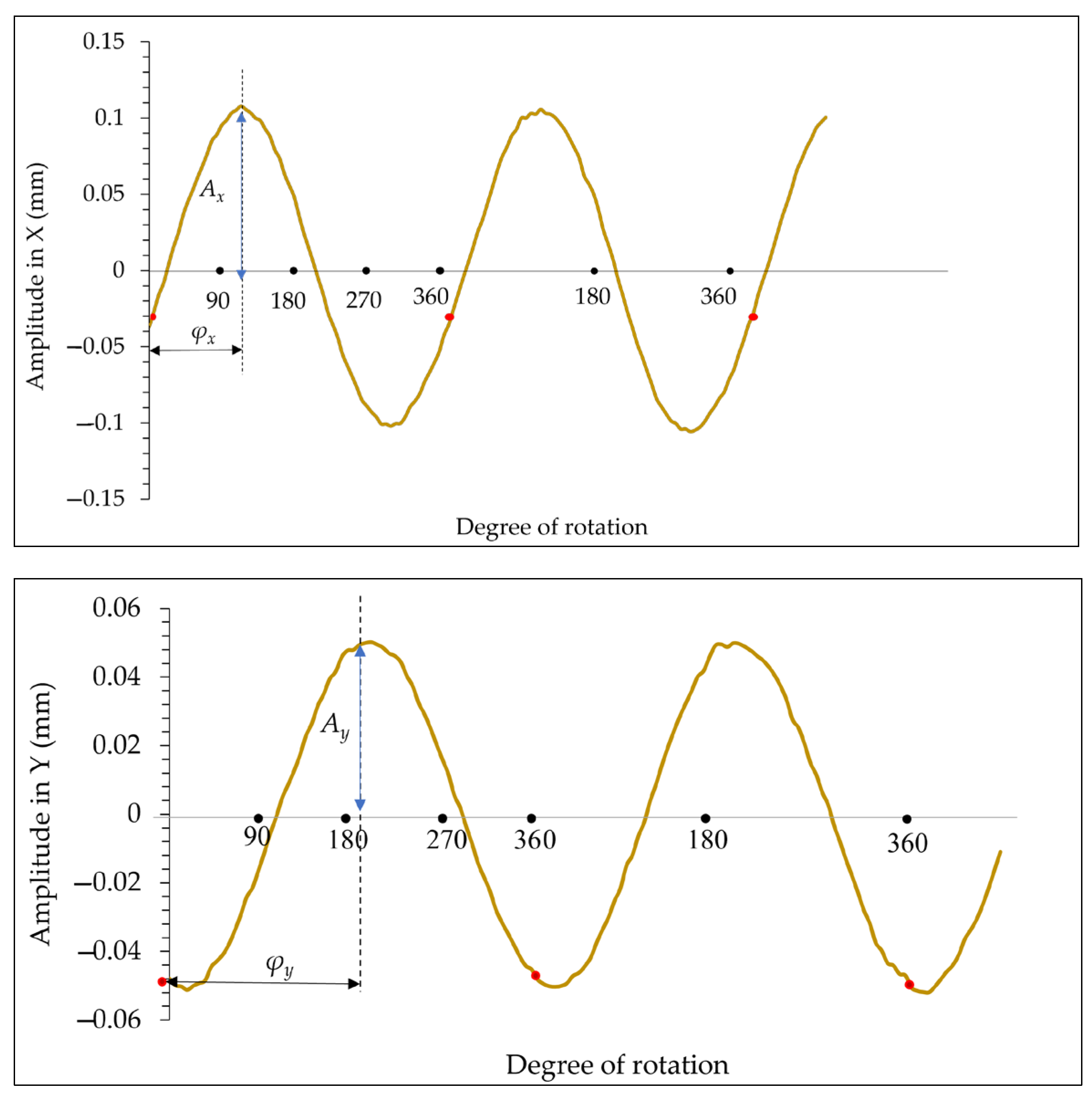
Figure 9 demonstrates one example of a recorded sensor response, in which the red-colored dots represent the key phasor pulses in the X and Y directions. The response phase angle
φ is defined as the angular displacement in degrees from the key phasor pulse to the first positive peak of the vibration amplitude. From
Figure 9, the estimated value of
φx is roughly 110°, whereas
φy is approximately 200°, with
φy lagging behind the X probe sensor by 90°. This phase difference somewhat verifies the correctness of the data sequences, as the Y sensor is precisely positioned 90° behind the X sensor.
The vibration responses from the sensor outputs can be expressed as:
where the vibration amplitudes and phases in the X and Y directions can be obtained from
Figure 9. The four feature responses
(f1,
f2,
f3, and
f4) from the experimental study can be assessed using the equations shown above and Equations (20)–(23). This response can be fed into a trained FNN implemented into the monitoring system for real-time fault component (
U,
α,
s,
θ) diagnosis.
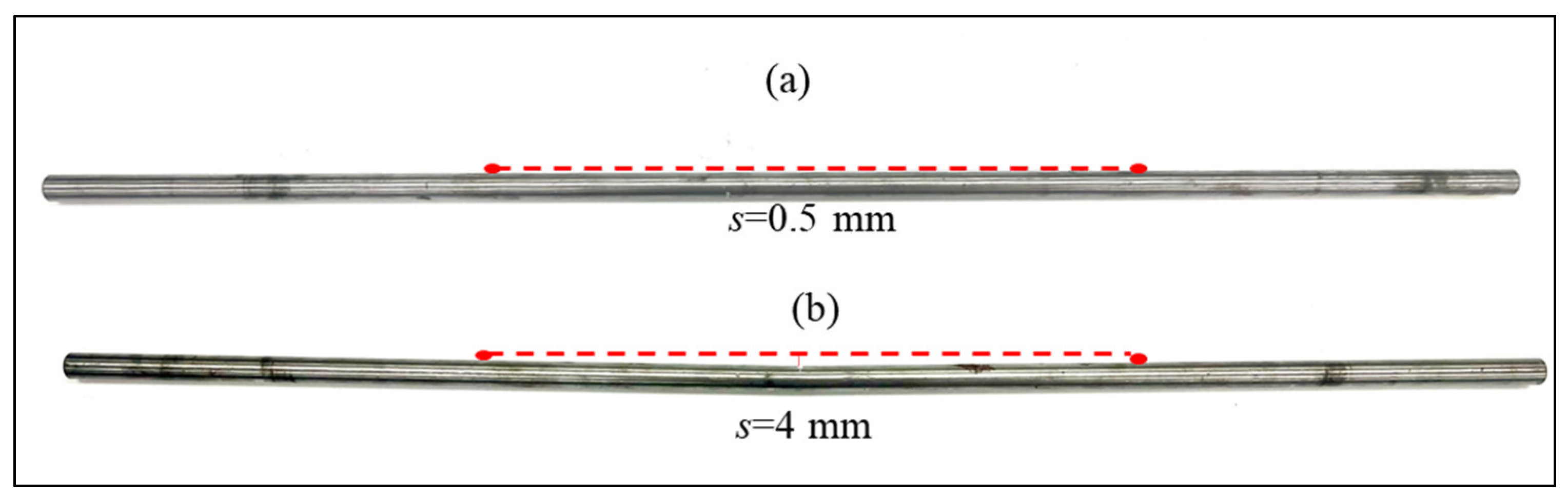
The disk in the test rig features 16 holes with an angular separation of 22.5° between each hole, facilitating the determination of the imbalance phase angle
α measured from the key phasor. The formation of a small permanent shaft bow is difficult to control because the shaft must be heated and bent to reach the plastic deformation region. Therefore, only two shaft bows were employed in the study, each with residual bowing of 0.5 mm and 4 mm, as shown in
Figure 10. These shafts were installed on the rotor kit and the mass imbalances on the disk were varied before initiating the rotor operation.
The operational parameters were deliberately set to 1600 rpm and 3200 rpm, corresponding to the sub-critical (
τ = 0.69) and trans-critical speeds (
τ = 1.39), respectively, given initial bowing of 0.5 mm. In the interest of safety, the machinery was deliberately operated at a speed far below the critical threshold during the initial bowing phase of 4 mm. This experimental validation approach is used to determine an FNN’s capability in identifying fault components related to imbalances and shaft bowing (
U,
α,
s,
θ). However, the real fault component was employed with four different values while keeping
s constant to estimate the fault components using the FNN. A detailed comparison between the real experimental data and the FNN’s estimated values is given in
Table 5,
Table 6 and
Table 7. Each table illustrates four scenarios of imbalance and shaft bowing combinations—case 1 reveals two fault angles in the same quadrant with a difference, case 2 demonstrates the two fault angles in the phase, case 3 depicts faults almost in the anti-phase, and case 4 demonstrates two faults almost perpendicular to each other, i.e., almost a 90° difference.
In the following tables, the diagnosed errors are expressed as two types. First, they are expressed in terms of the fault amplitude percentage error and the phase difference, as shown in column 5. Columns 6 and 7, however, express the errors in terms of the in-line and vertical amplitude error percentages Δ
U//, Δ
s// and Δ
U⊥, Δ
s⊥. The error in line with the fault vector indicates the amplitude error, while the vertical component can be viewed as the direction error. Based on the results presented in
Table 5, it can be observed that under sub-critical speeds and with the amplitude error of concern, the imbalance and shaft bowing errors both exhibit the lowest values, as they are in-phase. The biggest errors for the two faults occur in case 4, in which the two faults are perpendicular to each other.
Table 6 shows similar cases to
Table 5 except that the rotor was running at a trans-critical speed of 3200 rpm. It can be observed that the lowest error value for the imbalance occurred in case 4 and the lowest bow error value occurred in case 3. A peculiar feature can be observed in
Table 6, in which the shaft bowing exhibits significant error values of up to 38% for all cases except case 3, when two faults were in the anti-phase. This is because the bowing response diminishes at high speeds, such that the identification process generates larger errors.
Table 7 illustrates the case of
s = 4 mm at a very slow running speed. Under such conditions, the overall imbalance errors are bigger because the bow strongly dominates the response, such that the imbalance response becomes a fraction of the total response and generates a larger error during the data fitting process. The lowest imbalance error happens in the anti-phase situation. The overall shaft bow errors are small, except for case 4.
However, an observable error disparity related to the imbalance and shaft bowing becomes apparent when the rotor is rotating over the critical speed, particularly above 3200 rpm. Investigating the vibration patterns caused by imbalance and shaft bow faults suggests that a smaller discrepancy in inaccuracy occurs for the imbalance when the frequency ratio surpasses one, which can be observed at 3200 rpm in
Figure 5. Upon further examination, it is evident that the imbalance error at 3200 rpm exceeds the prediction based on the theoretical explanation. This variation is caused by various practical engineering issues that can impact the results, adding complexities beyond the reduced theoretical models.
For
s = 4 mm at 650 rpm in this state, the rotor’s frequency ratio is lower than the critical speed.
Figure 5 shows that when the frequency ratio is smaller than one, the system’s behavior indicates that the response is mostly influenced by the shaft bowing amplitude. This crucial finding suggests that in specific circumstances, the influence of the shaft bowing on the system’s behavior is greater than that of the imbalance. The small discrepancy in the error margins indicates that both types of faults have a substantial role in the observed vibrations, despite their theoretical differences. The consistent error gaps highlight the complex relationship between imbalance and shaft bow effects on the system’s dynamic behavior. This shows a situation where both causes have similar effects, and their combined impact is seen in the total inaccuracy in the system’s response.
The more significant disparities between the actual and diagnosed faults can be prominently observed for all experiments, unlike the scenarios using simulated data, in which very high accuracy rates were achieved. These larger errors may be attributed to several causes. For instance, there may have been an existing imbalance and bowing before we intentionally added the trial weight or because the notable clearance between the shaft and bearing was not a good fit for the simple support assumption. Both of these issues would generate vibration noises and reduce the diagnosis accuracy in the experiments.
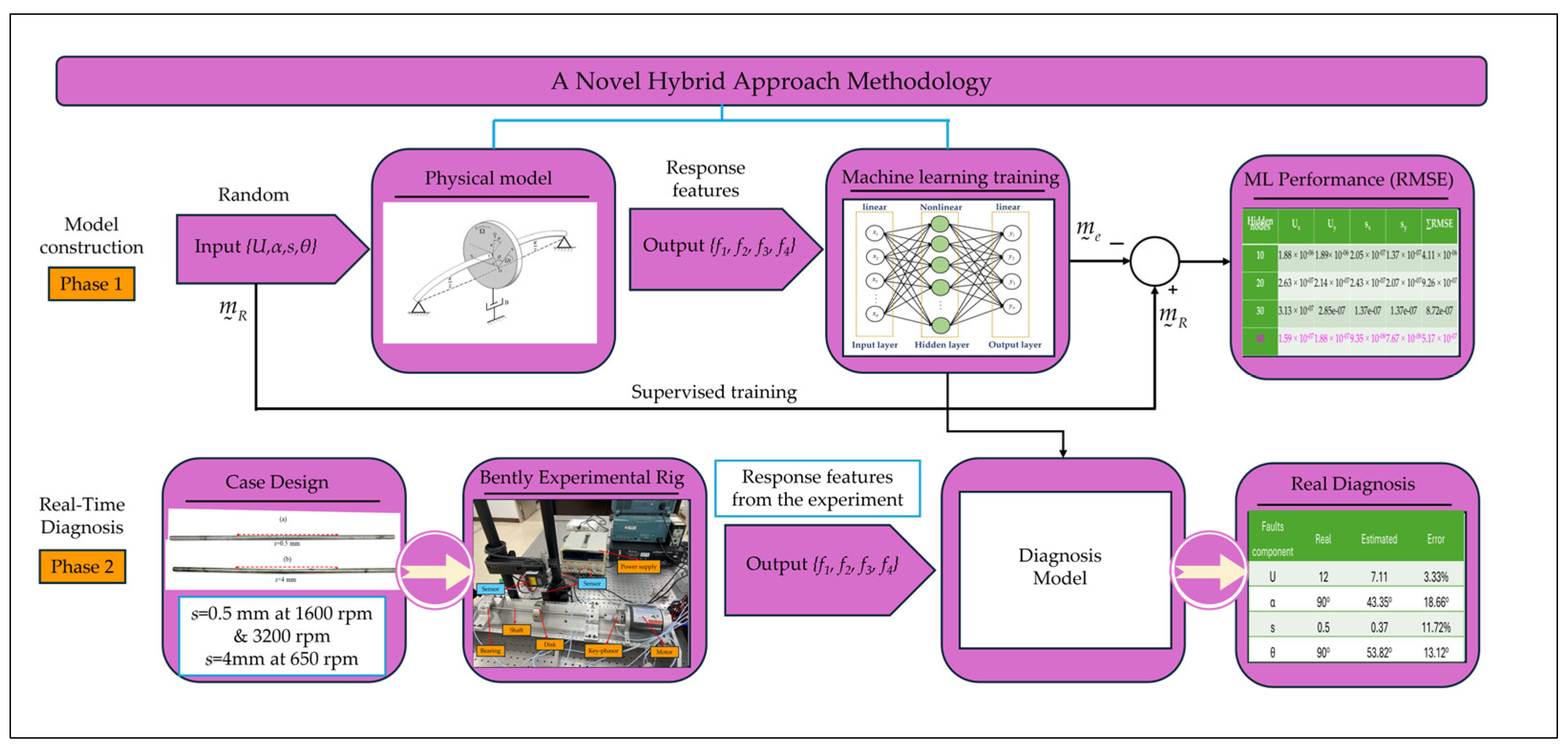
In essence, this research demonstrates the efficacy of the combined physical model and machine learning approach in identifying multiple faults. The integration of the physical model ensures an accurate representation of the Jeffcott rotor system, while the FNN provides efficient and reliable diagnosis capabilities. This research can provide new possibilities for advanced rotor system diagnosis and maintenance strategies in various industrial applications.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}