

Evaluation of Interval Type-2 Fuzzy Neural Super-Twisting Control Applied to Single-Phase Active Power Filters


Abstract
1. Introduction
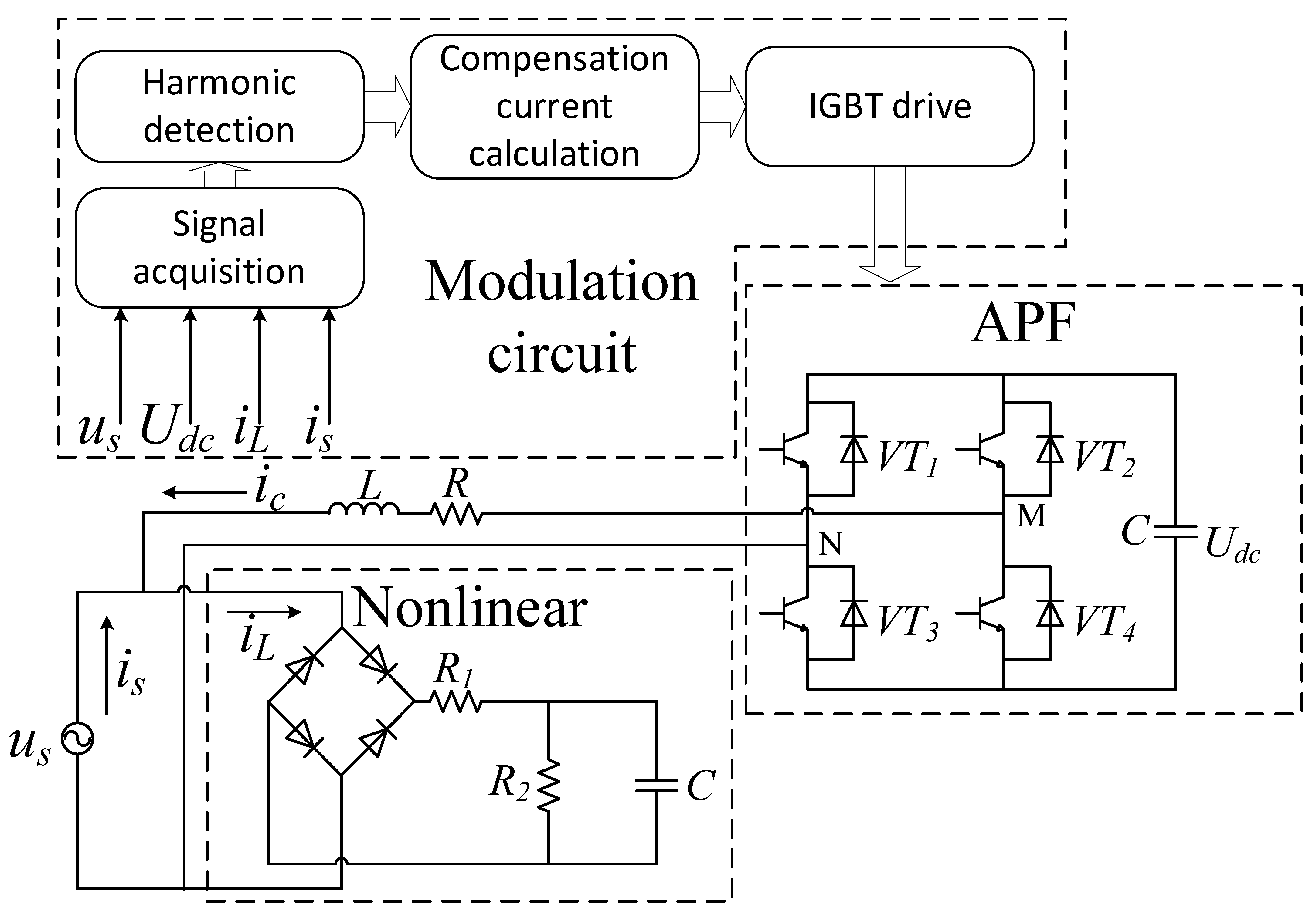
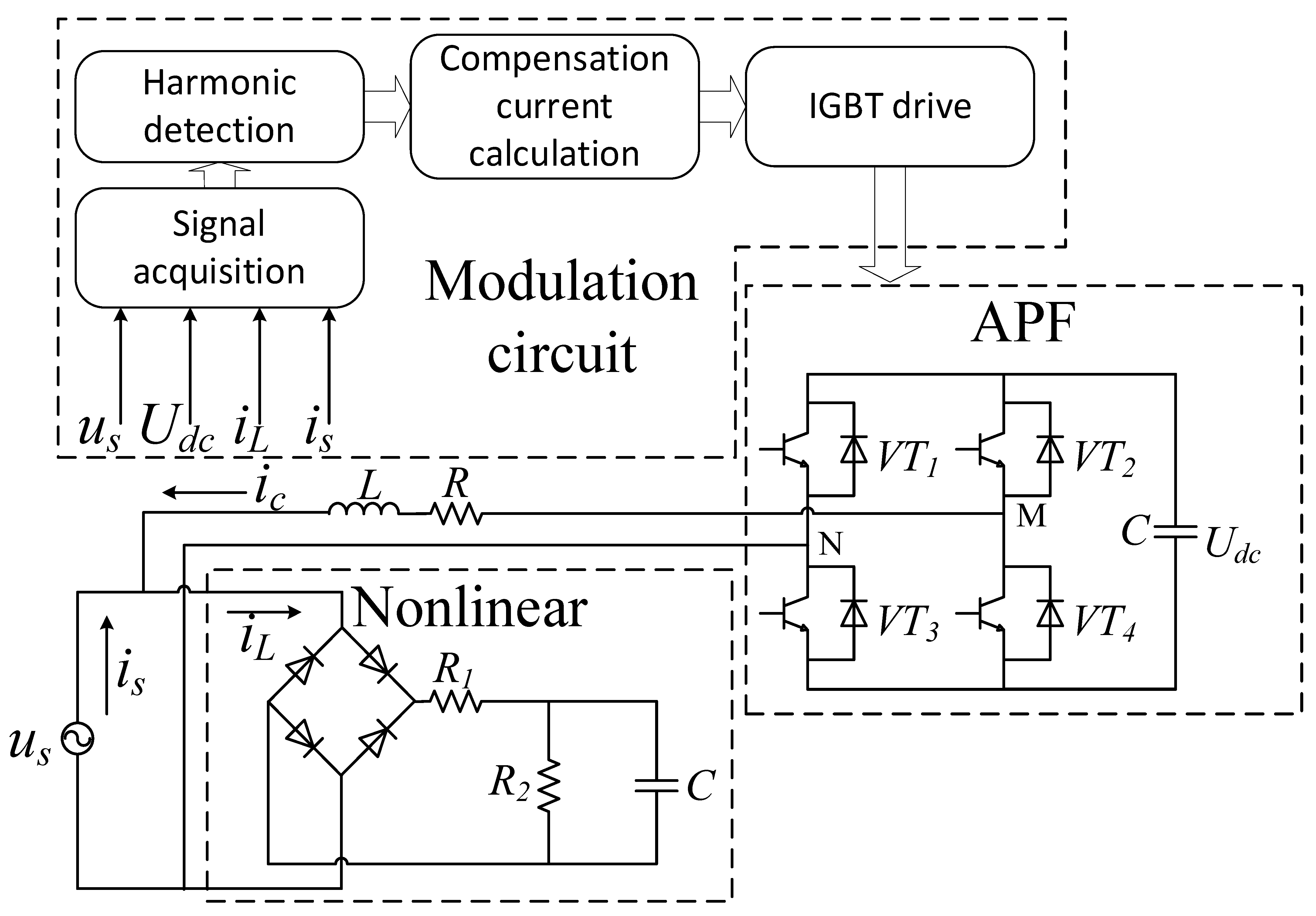
2. Mathematical Model of Active Power Filter
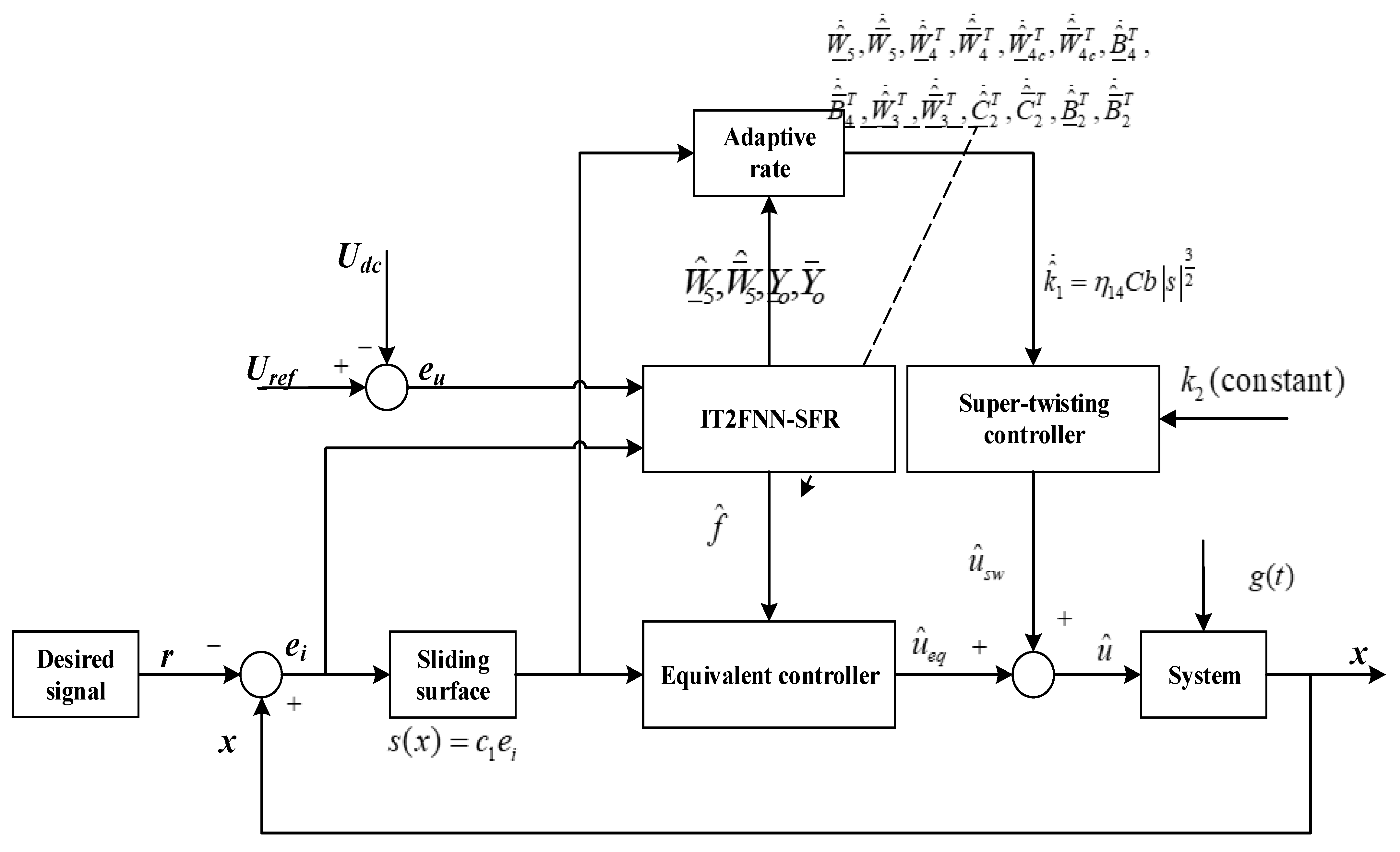
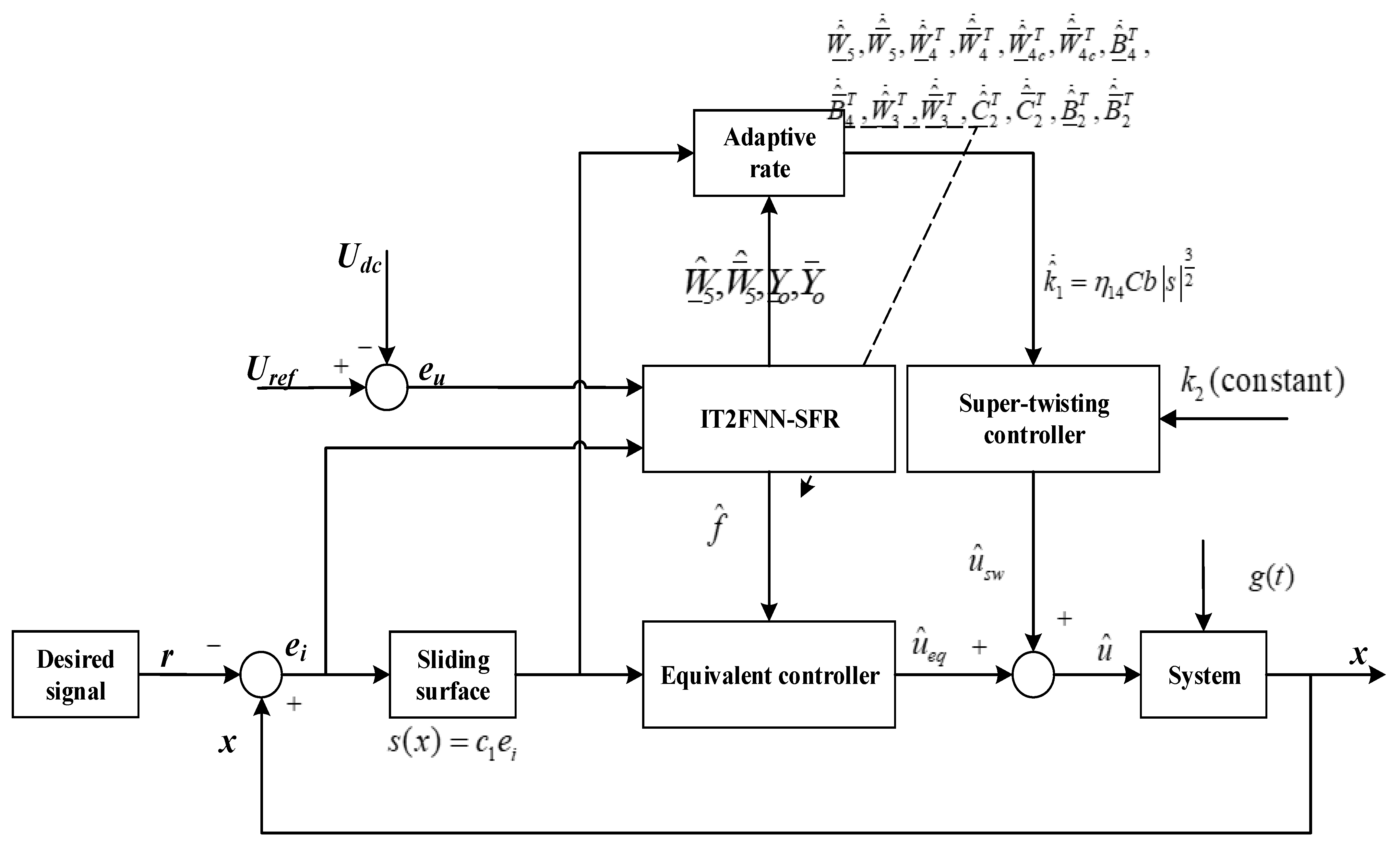
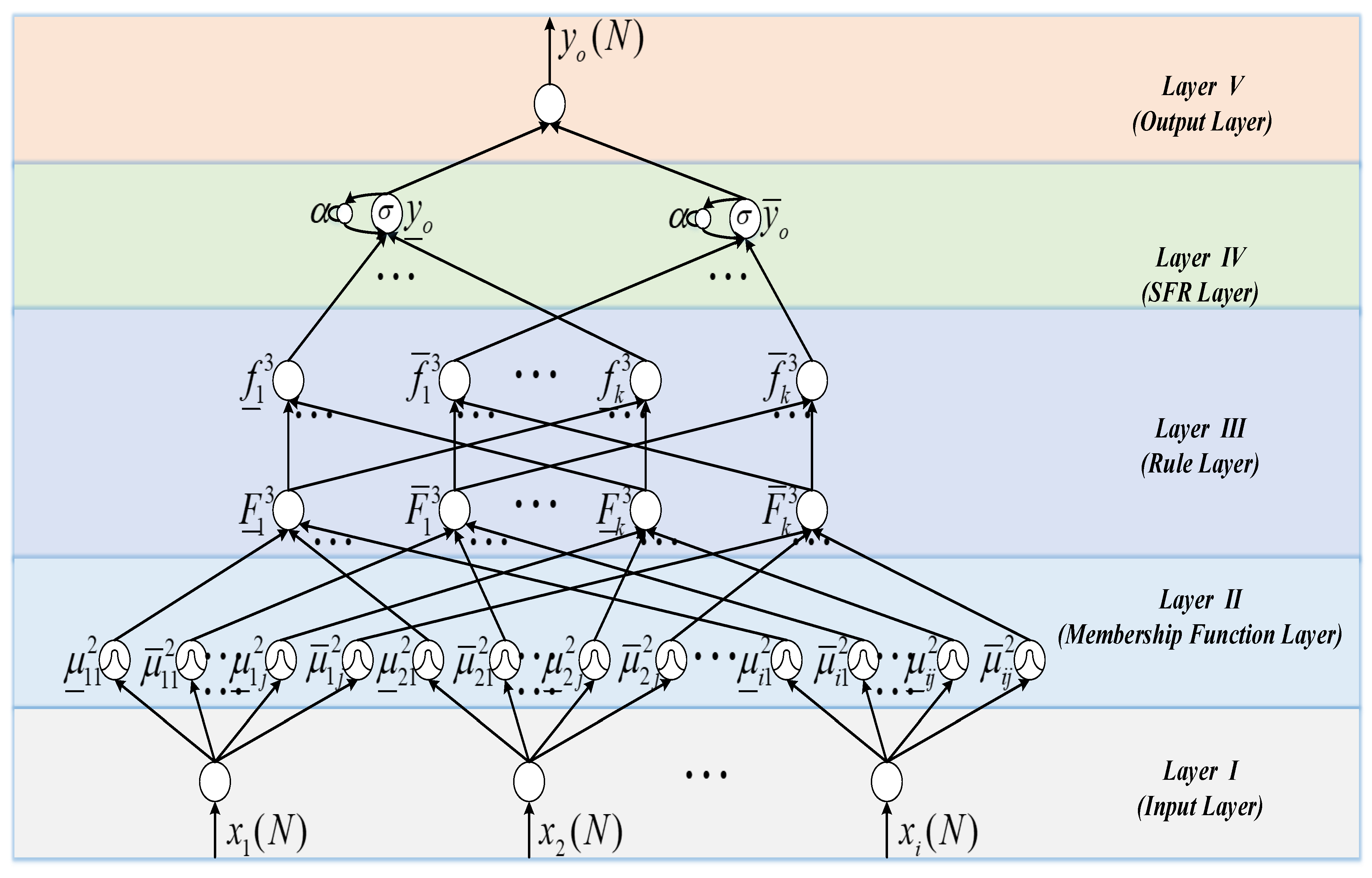
3. Controller Design and Analysis
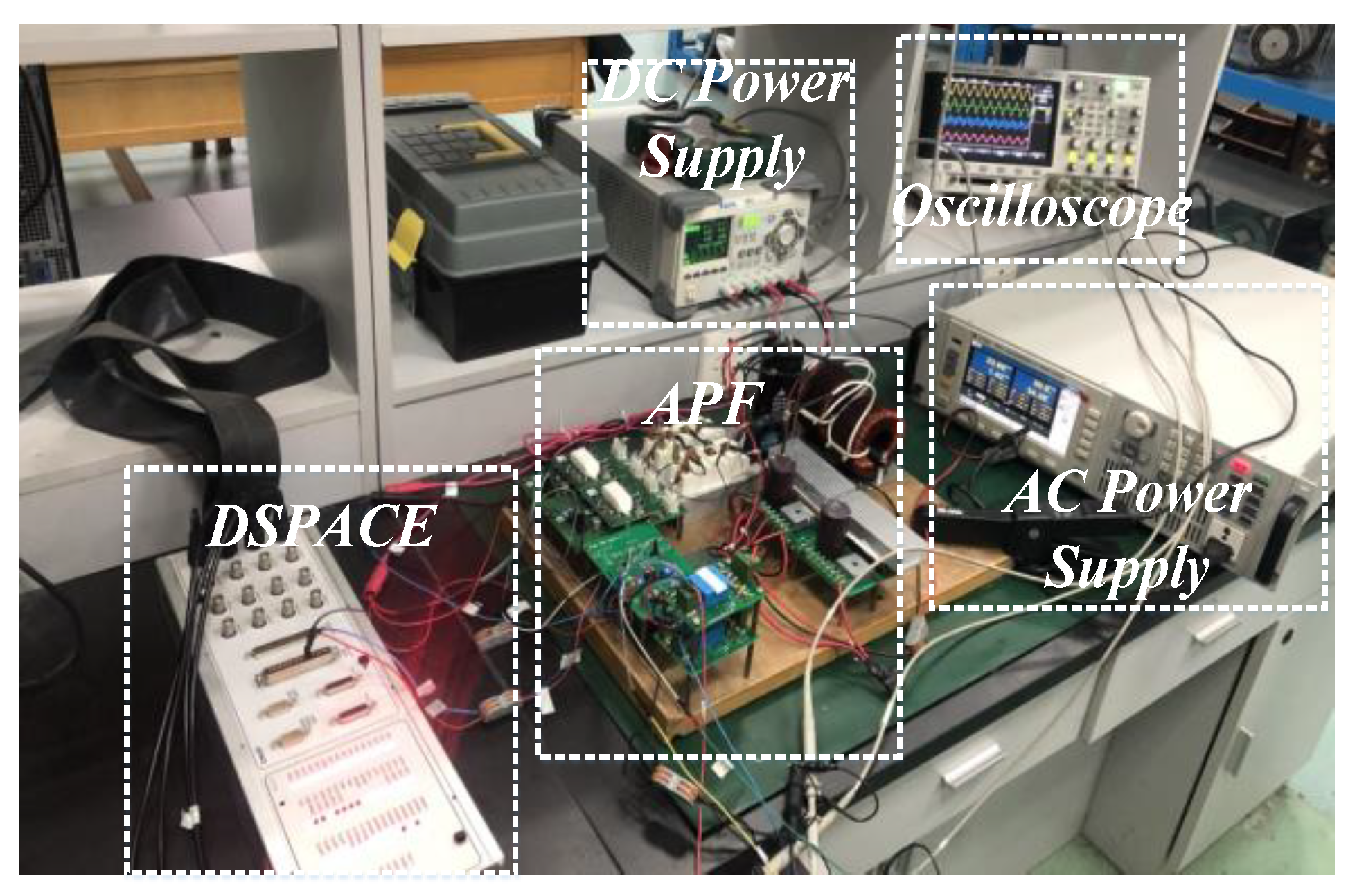
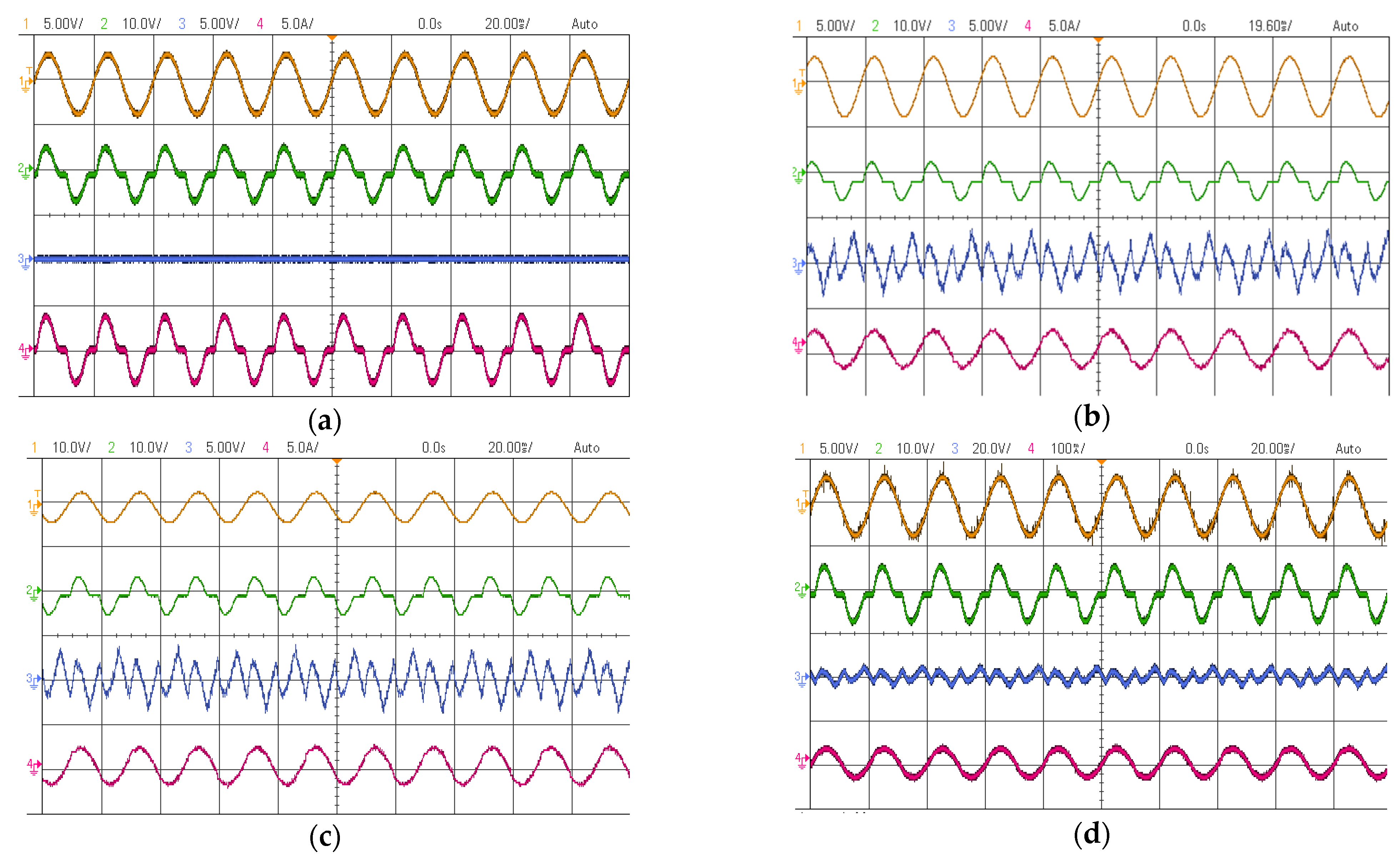
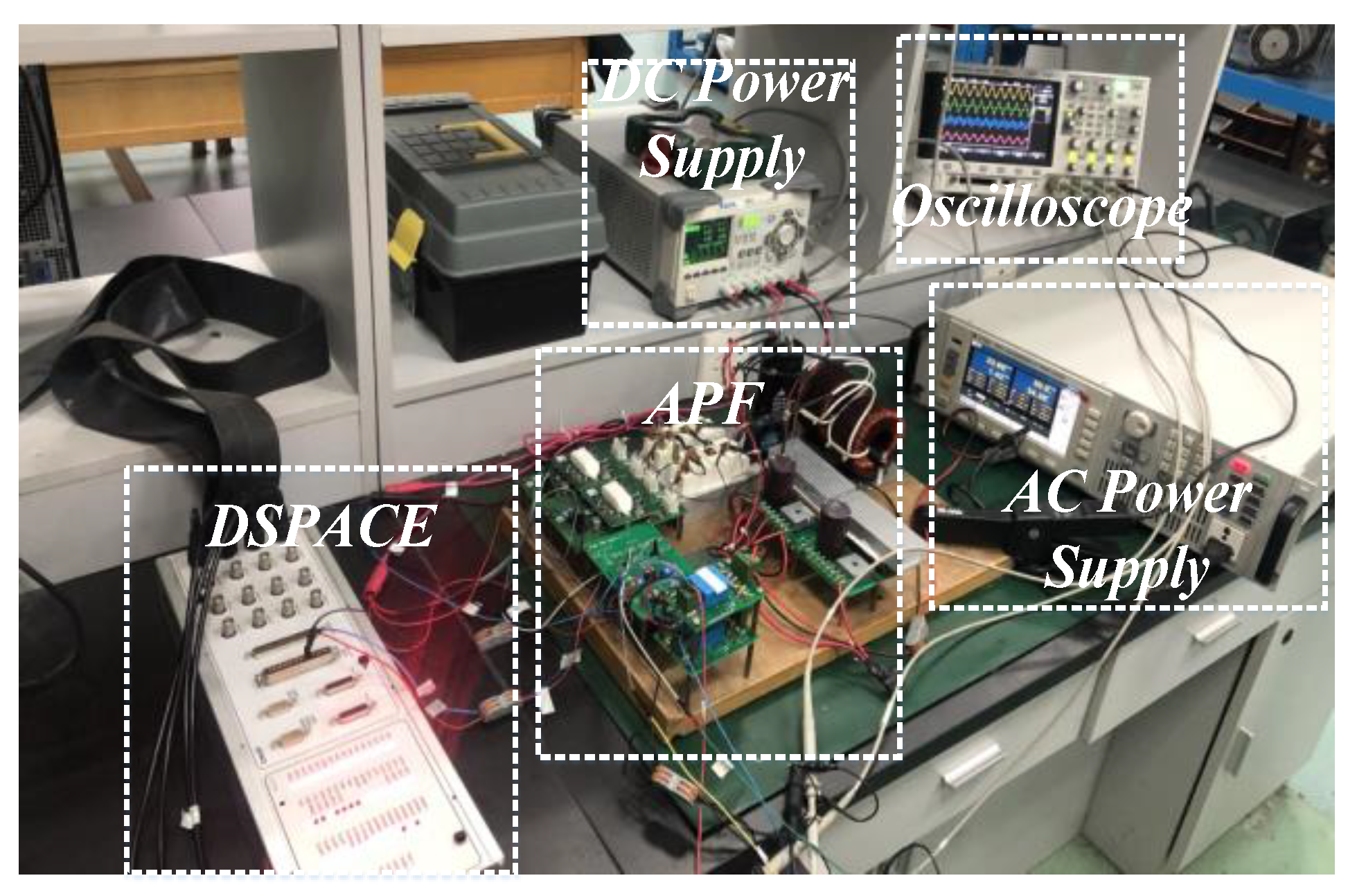
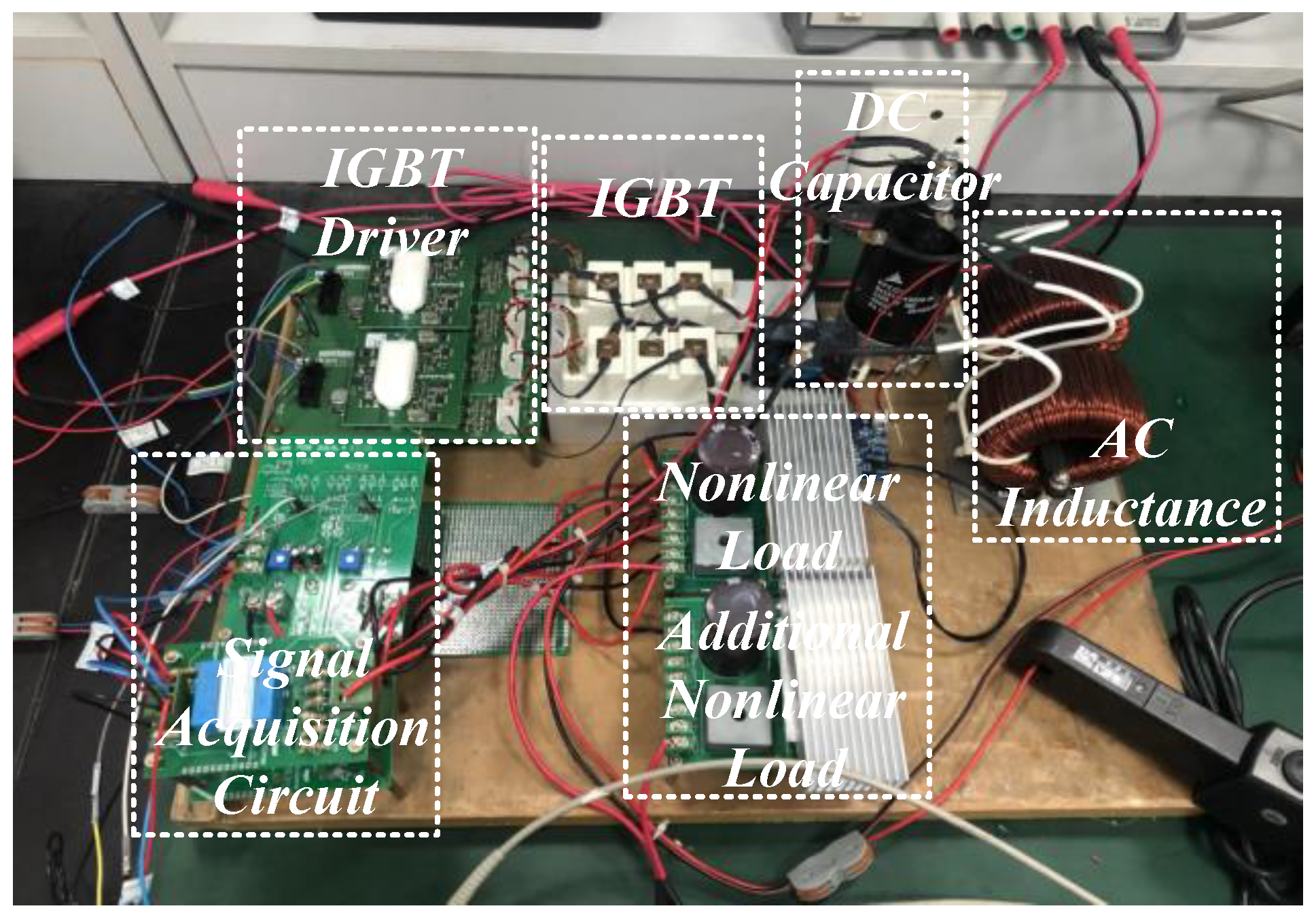
4. Experiment Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, R.; Huang, W.; Hu, B.; Du, Q.; Guo, X. Harmonic Detection for Active Power Filter Based on Two-Step Improved EEMD. IEEE Trans. Instrum. Meas. 2022, 71, 1–10. [Google Scholar] [CrossRef]
- Mishra, A.K.; Das, S.R.; Ray, P.K.; Mallick, R.K.; Mohanty, A.; Mishra, D.K. PSO-GWO Optimized Fractional Order PID Based Hybrid Shunt Active Power Filter for Power Quality Improvements. IEEE Access 2020, 8, 74497–74512. [Google Scholar] [CrossRef]
- Noureddine, K.; Abedlhafid, S. ADALINE Harmonics Extraction Algorithm of Three-Level Shunt Active Power Filter Based on Predictive Current Control. In Proceedings of the 2020 International Conference on Electrical Engineering (ICEE), Istanbul, Turkey, 25–27 September 2020; pp. 1–7. [Google Scholar]
- Mousavi, Y.; Bevan, D.; Kucukdemiral, I.; Fekih, A. Sliding mode control of wind energy conversion systems: Trends and applications. Renew. Sustain. Energy Rev. 2022, 167, 112734. [Google Scholar] [CrossRef]
- Qu, L.; Qiao, W.; Qu, L. An Extended-State-Observer-Based Sliding-Mode Speed Control for Permanent-Magnet Synchronous Motors. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 1605–1613. [Google Scholar] [CrossRef]
- Fei, J.; Wang, Z.; Pan, Q. Self-Constructing Fuzzy Neural Fractional-Order Sliding Mode Control of Active Power Filter. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 10600–10611. [Google Scholar] [CrossRef] [PubMed]
- Fei, J.; Xin, M. Robust Adaptive Sliding Mode Controller for Semi-active Vehicle Suspension System. Int. J. Innov. Comput. Inf. Control 2012, 8, 691–700. [Google Scholar]
- Fei, J.; Zhang, L. Self-Constructing Chebyshev Fuzzy Neural Complementary Sliding Mode Control and Its Application. IEEE Trans. Neural Netw. Learn. Syst. 2024, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Lin, X.; Liu, J.; Liu, F.; Liu, Z.; Gao, Y.; Sun, G. Fractional-Order Sliding Mode Approach of Buck Converters with Mismatched Disturbances. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 3890–3900. [Google Scholar] [CrossRef]
- Fei, J.; Wang, H.; Fang, Y. Novel Neural Network Fractional-order Sliding Mode Control with Application to Active Power Filter. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 3508–3518. [Google Scholar] [CrossRef]
- Hou, Q.; Ding, S.; Yu, X. Composite Super-Twisting Sliding Mode Control Design for PMSM Speed Regulation Problem Based on a Novel Disturbance Observer. IEEE Trans. Energy Convers. 2021, 36, 2591–2599. [Google Scholar] [CrossRef]
- Zholtayev, D.; Rubagotti, M.; Do, T.D. Adaptive super-twisting sliding mode control for maximum power point tracking of PMSG-based wind energy conversion systems. Renew. Energy 2022, 183, 877–889. [Google Scholar] [CrossRef]
- Wu, Y.; Ma, F.; Liu, X.; Hua, Y.; Liu, X.; Li, G. Super Twisting Disturbance Observer-Based Fixed-Time Sliding Mode Backstepping Control for Air-Breathing Hypersonic Vehicle. IEEE Access 2020, 8, 17567–17583. [Google Scholar] [CrossRef]
- Shah, I.; Rehman, F. Smooth Second Order Sliding Mode Control of a Class of Underactuated Mechanical Systems. IEEE Access 2018, 6, 7759–7771. [Google Scholar] [CrossRef]
- Fei, J.; Chen, Y.; Liu, L.; Fang, Y. Fuzzy Multiple Hidden Layer Recurrent Neural Control of Nonlinear System Using Terminal Sliding-Mode Controller. IEEE Trans. Cybern. 2022, 52, 9519–9534. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Su, C.; Li, H.; Lu, R. Barrier Function-Based Adaptive Control for Uncertain Strict-Feedback Systems Within Predefined Neural Network Approximation Sets. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 2942–2954. [Google Scholar] [CrossRef] [PubMed]
- Deng, F.; Hua, M. Robust delay-dependent exponential stability for uncertain stochastic neural networks with mixed delays. Neurocomputing 2011, 74, 1503–1509. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, J.; Lin, G.; Sun, N. Adaptive neural network control for maglev vehicle systems with time-varying mass and external disturbance. Neural Comput. Appl. 2023, 35, 12361–12372. [Google Scholar] [CrossRef]
- Xiao, J.; Cheng, J.; Shi, K.; Zhang, R. A General Approach to Fixed-Time Synchronization Problem for Fractional-Order Multidimension-Valued Fuzzy Neural Networks Based on Memristor. IEEE Trans. Fuzzy Syst. 2022, 30, 968–977. [Google Scholar] [CrossRef]
- Li, Y.; Dong, S.; Li, K. Fuzzy adaptive finite-time event-triggered control of time-varying formation for nonholonomic multirobot systems. IEEE Trans. Intell. Veh. 2023, 9, 725–737. [Google Scholar] [CrossRef]
- Fei, J.; Liu, L. Real-Time Nonlinear Model Predictive Control of Active Power Filter Using Self-Feedback Recurrent Fuzzy Neural Network Estimator. IEEE Trans. Ind. Electron. 2022, 69, 8366–8376. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, R.; Li, S.; He, W.; Shi, Z. Composite Neural Learning Based Nonsingular Terminal Sliding Mode Control of MEMS Gyroscopes. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 1375–1386. [Google Scholar] [CrossRef] [PubMed]
- Zhao, T.; Liu, J.; Dian, S.; Guo, R.; Li, S. Sliding-Mode-Control-Theory-Based Adaptive General Type-2 Fuzzy Neural Network Control for Power-line Inspection Robots. Neurocomputing 2020, 401, 281–294. [Google Scholar] [CrossRef]
- Du, G.; Liang, Y.; Gao, B.; Al Otaibi, S.; Li, D. A Cognitive Joint Angle Compensation System Based on Self-Feedback Fuzzy Neural Network with Incremental Learning. IEEE Trans. Ind. Inform. 2021, 17, 2928–2937. [Google Scholar] [CrossRef]
- Li, Y.; Feng, K.; Li, K. Finite-time fuzzy adaptive dynamic event-triggered formation tracking control for USVs with actuator faults and multiple constraints. IEEE Trans. Ind. Inform. 2023, 20, 5285–5296. [Google Scholar] [CrossRef]
- Kumar, R.; Srivastava, S. A novel dynamic recurrent functional link neural network-based identification of nonlinear systems using Lyapunov stability analysis. Neural Comput. Appl. 2021, 33, 7875–7892. [Google Scholar] [CrossRef]
- Cheng, T.; Wu, J.; Wang, H.; Zheng, H. Dynamic Optimization of Rotor-Side PI Controller Parameters for Doubly-Fed Wind Turbines Based on Improved Recurrent Neural Networks Under Wind Speed Fluctuations. IEEE Access 2023, 11, 102713–102726. [Google Scholar] [CrossRef]
- Wang, J.; Fang, Y.; Fei, J. Adaptive Super-Twisting Sliding Mode Control of Active Power Filter Using Interval Type-2-Fuzzy Neural Networks. Mathematics 2023, 11, 2785. [Google Scholar] [CrossRef]
- Blooming, T.M.; Carnovale, D.J. Application of IEEE STD 519-1992 Harmonic Limits. In Proceedings of the Conference Record of 2006 Annual Pulp and Paper Industry Technical Conference, Appleton, WI, USA, 18–22 June 2006; pp. 1–9. [Google Scholar]
- Wallace, I. Key Changes and Differences between the New IEEE 519-2014 Standard and IEEE 519-1992. Alcatel Telecommun. Rev. 2014, 11, 1–2. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Supply voltage | |
| APF main circuit | , , , |
| Nonlinear load at steady state | , |
| Additional nonlinear load in parallel | , |
| Sampling time |
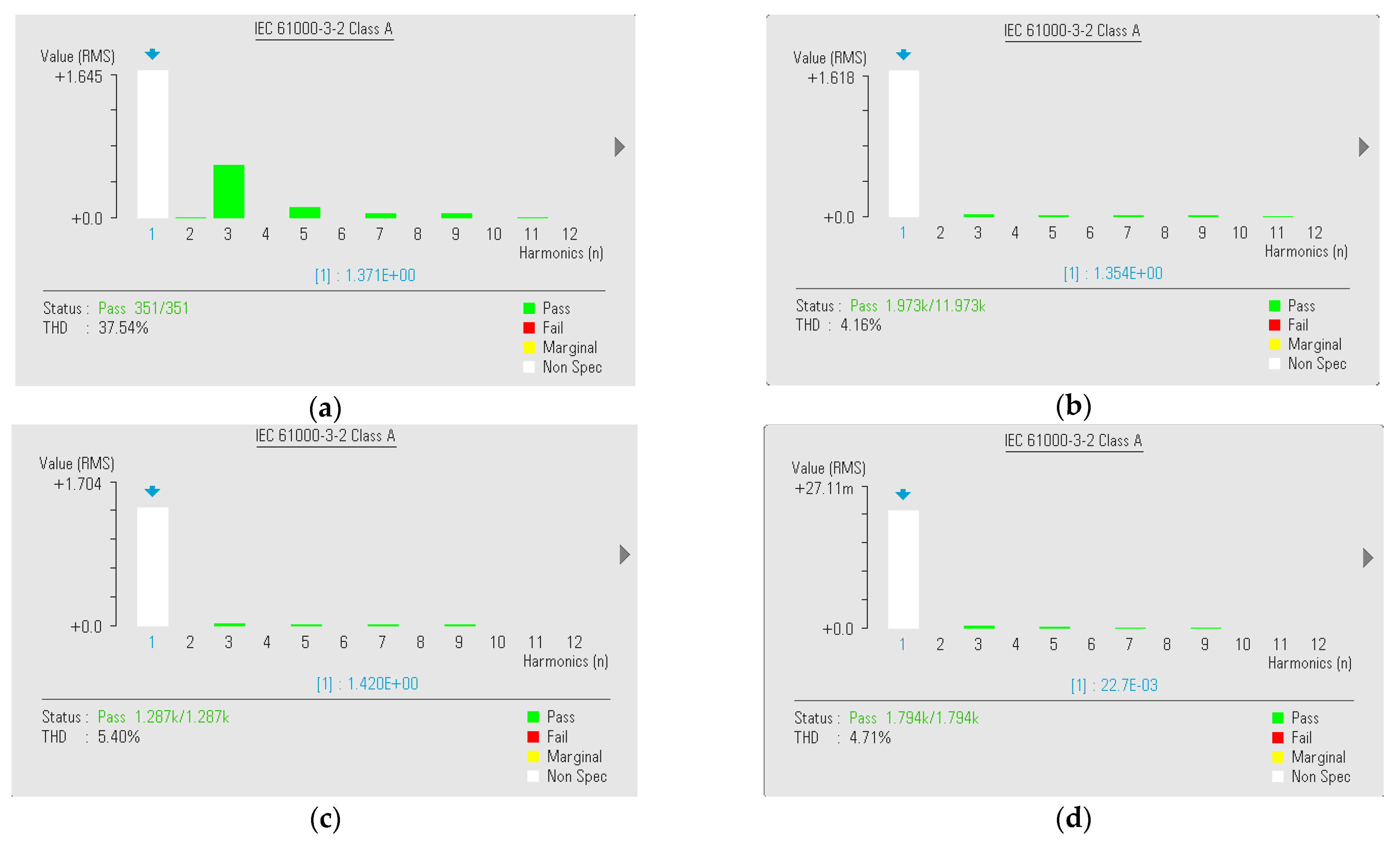
| ASMC | STSMC | IT2FNN-SFR STSMC | |
|---|---|---|---|
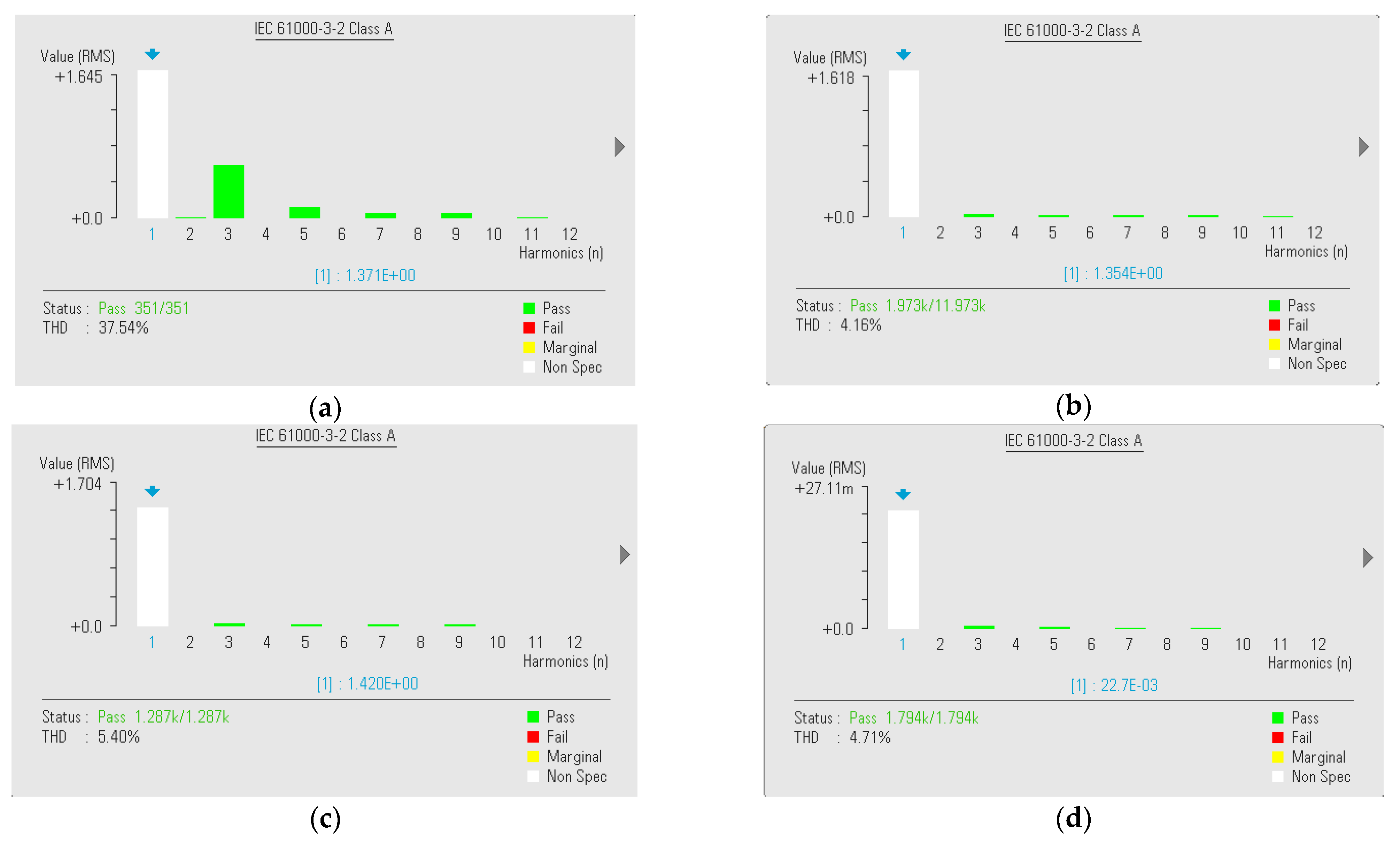
| Steady state | 5.40% | 4.71% | 4.16% |
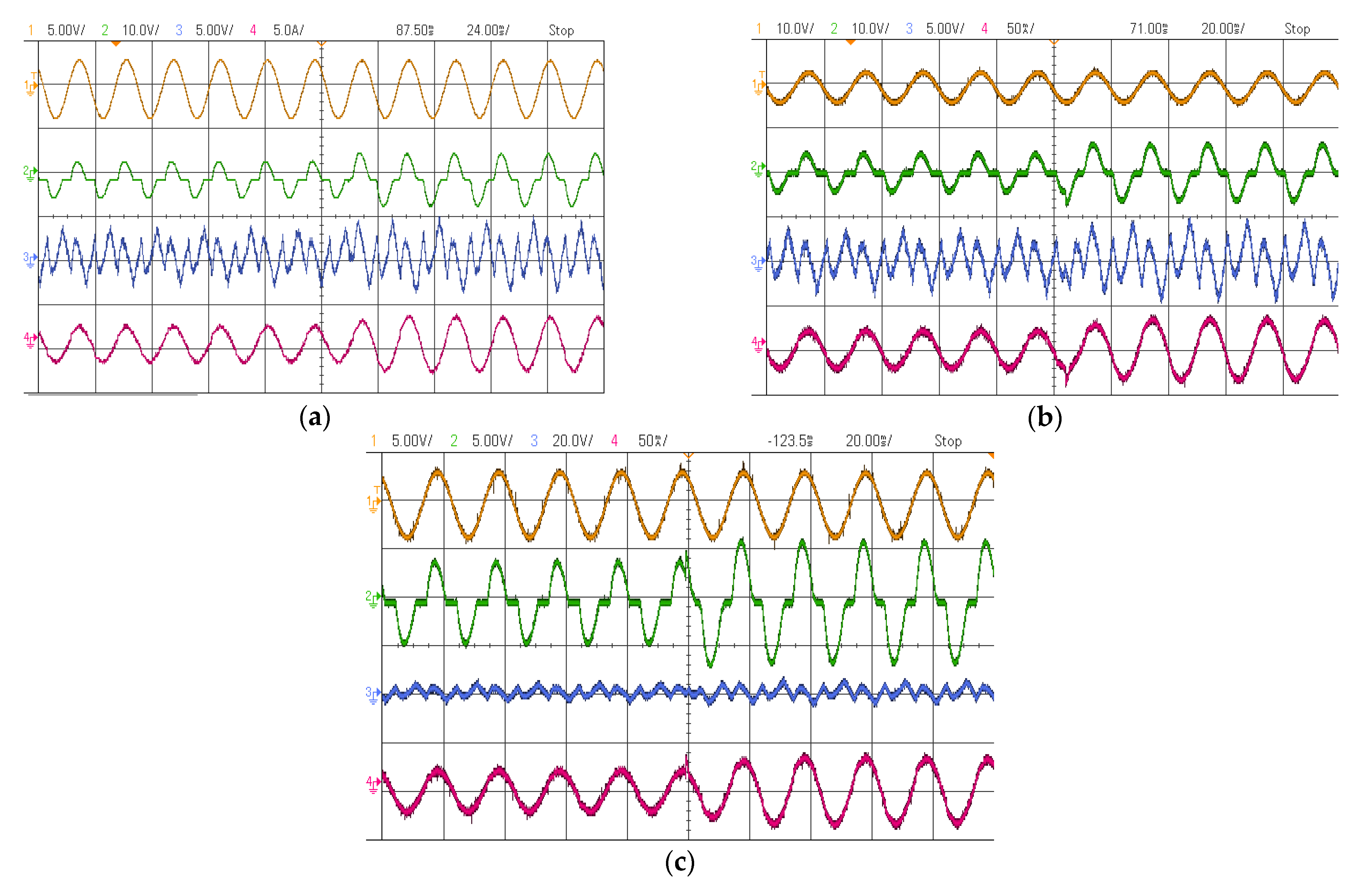
| Additional load connected | 4.94% | 4.23% | 3.87% |
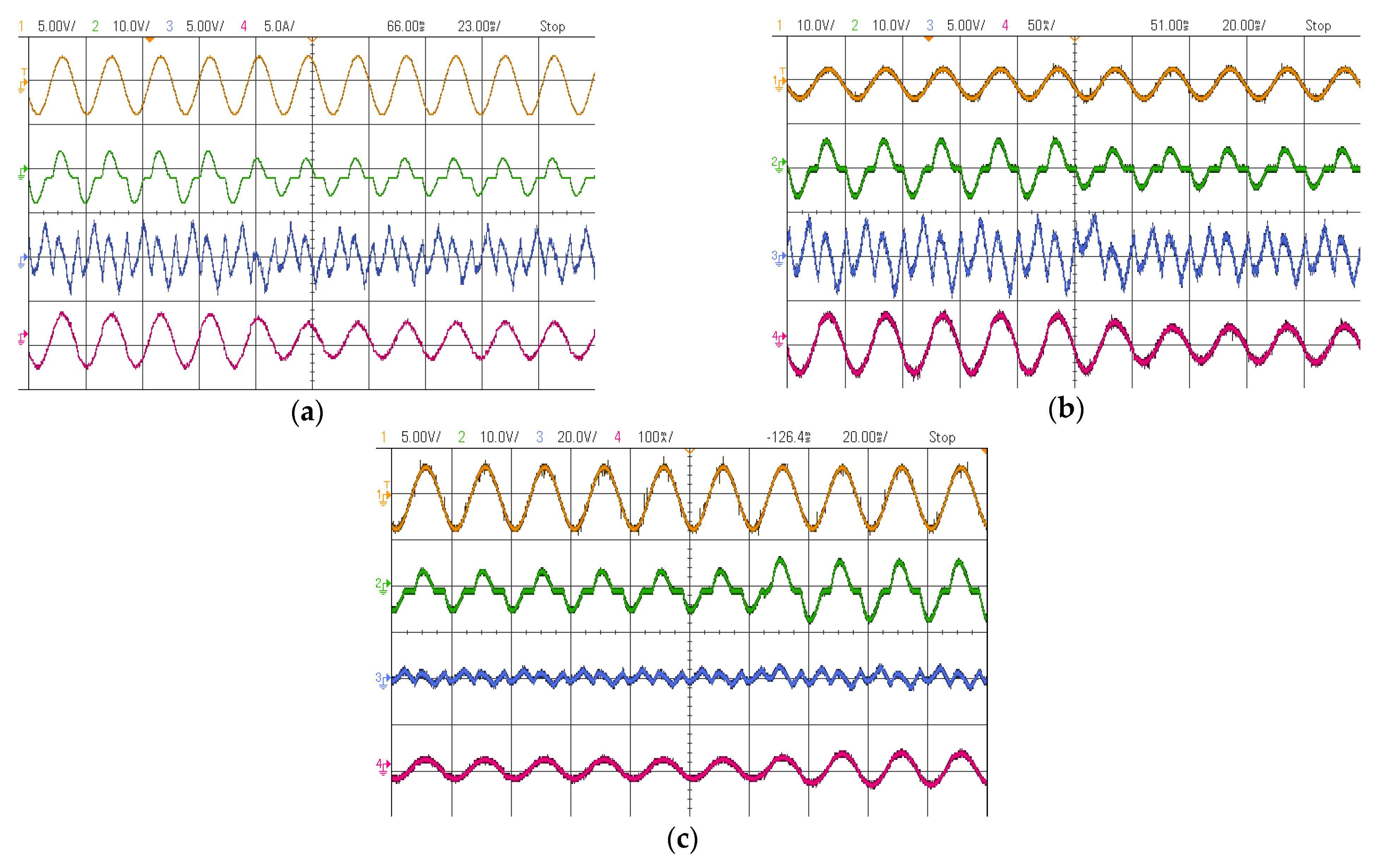
| Additional load disconnected | 5.87% | 5.10% | 4.72% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Li, X.; Fei, J. Evaluation of Interval Type-2 Fuzzy Neural Super-Twisting Control Applied to Single-Phase Active Power Filters. Appl. Sci. 2024, 14, 3271. https://doi.org/10.3390/app14083271
Wang J, Li X, Fei J. Evaluation of Interval Type-2 Fuzzy Neural Super-Twisting Control Applied to Single-Phase Active Power Filters. Applied Sciences. 2024; 14(8):3271. https://doi.org/10.3390/app14083271
Chicago/Turabian StyleWang, Jiacheng, Xiangguo Li, and Juntao Fei. 2024. "Evaluation of Interval Type-2 Fuzzy Neural Super-Twisting Control Applied to Single-Phase Active Power Filters" Applied Sciences 14, no. 8: 3271. https://doi.org/10.3390/app14083271
APA StyleWang, J., Li, X., & Fei, J. (2024). Evaluation of Interval Type-2 Fuzzy Neural Super-Twisting Control Applied to Single-Phase Active Power Filters. Applied Sciences, 14(8), 3271. https://doi.org/10.3390/app14083271