
High-Precision Position Detection and Communication Fusion Technology Using Beacon Spread-Spectrum Modulation with Four-Quadrant Detector


Abstract
1. Introduction
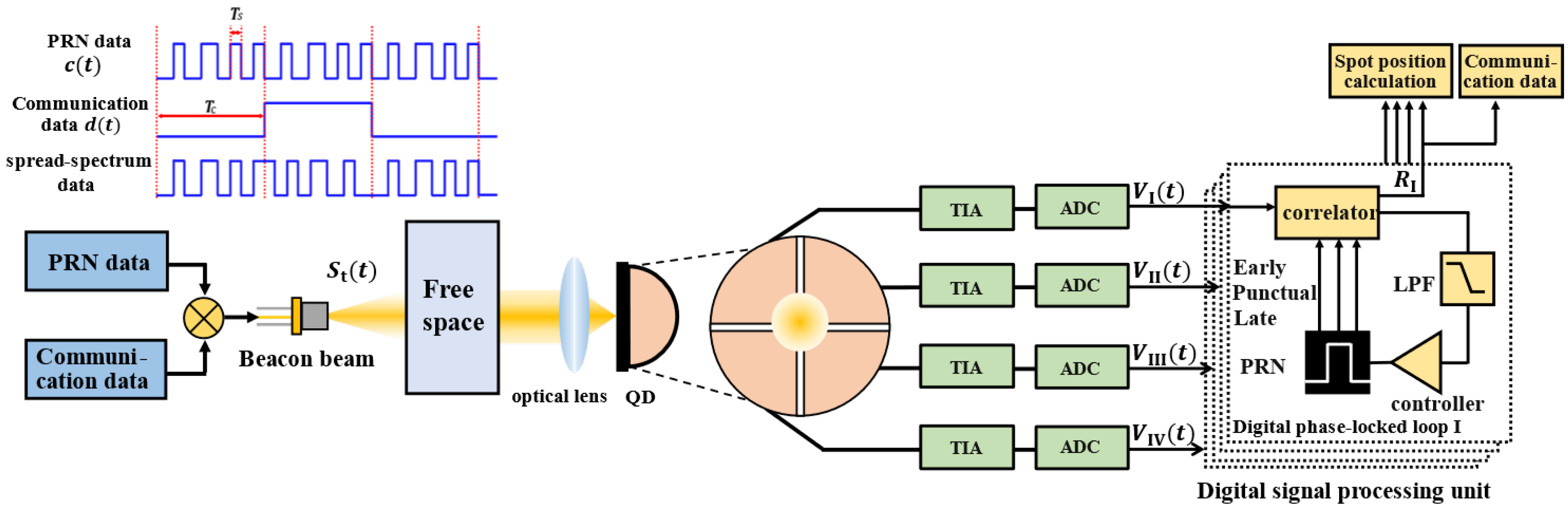
2. Principle and Methods
3. Detection Precision and Sensitivity Analysis
3.1. Precision Analysis of Quadrant Detector under Beacon Spread-Spectrum Modulation
3.2. Analysis of Detection Sensitivity for QD under Spread-Spectrum Technology
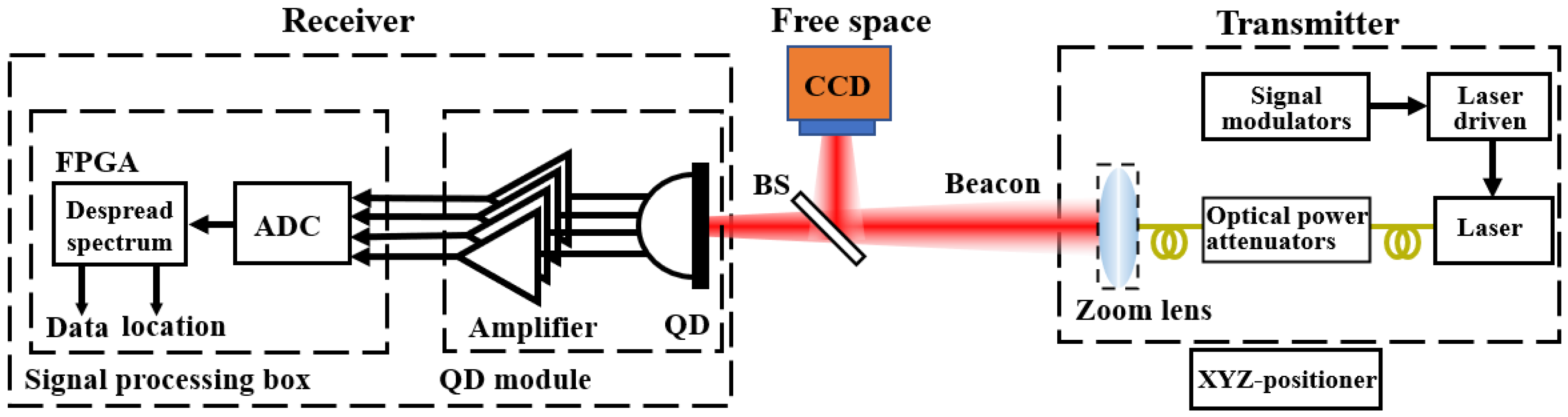
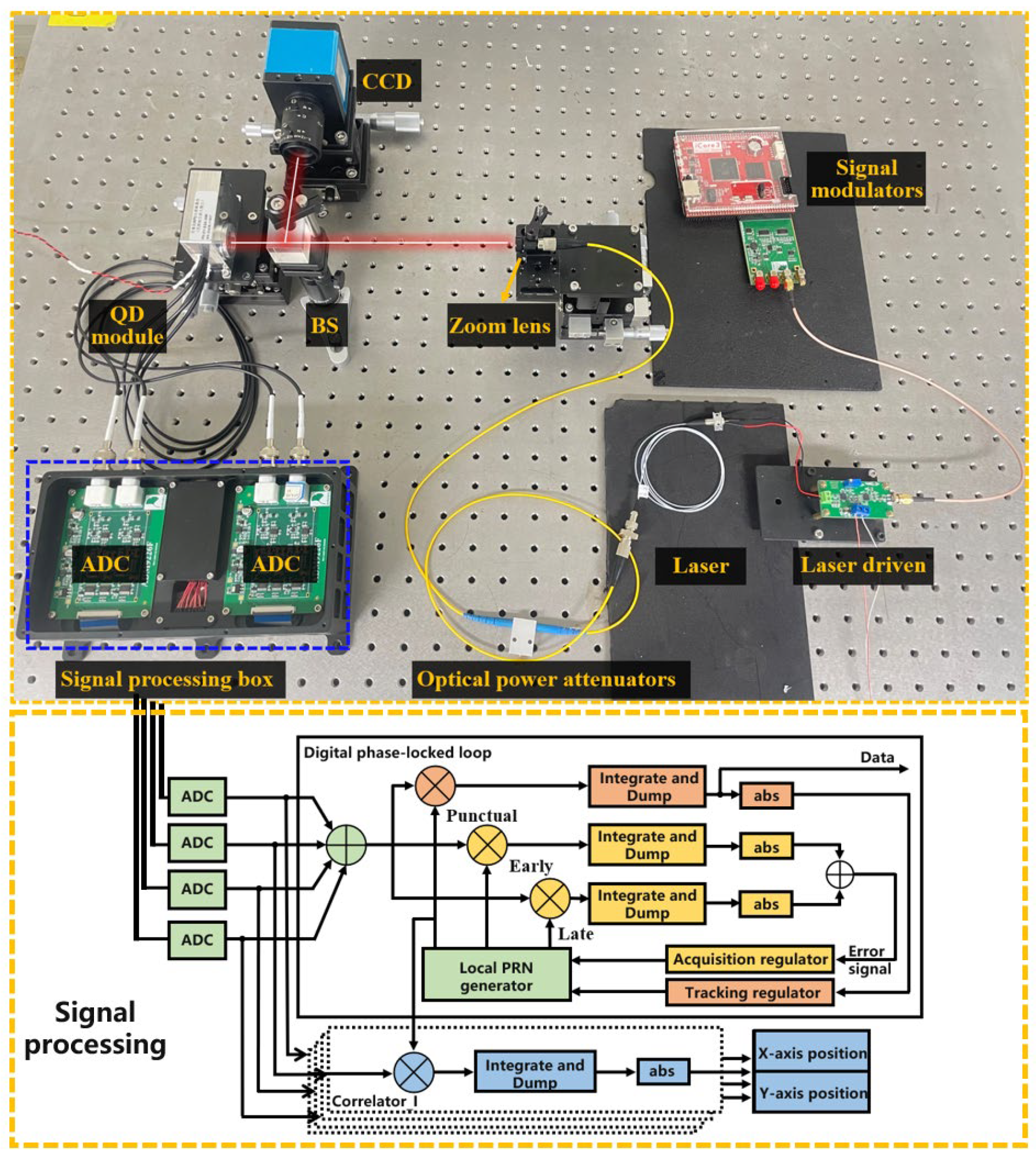
4. Construction of QD Experimental System and Digital Signal Processing
5. Simulation and Analysis
5.1. Position Detection of Light Spot under Beacon Spread-Spectrum Modulation
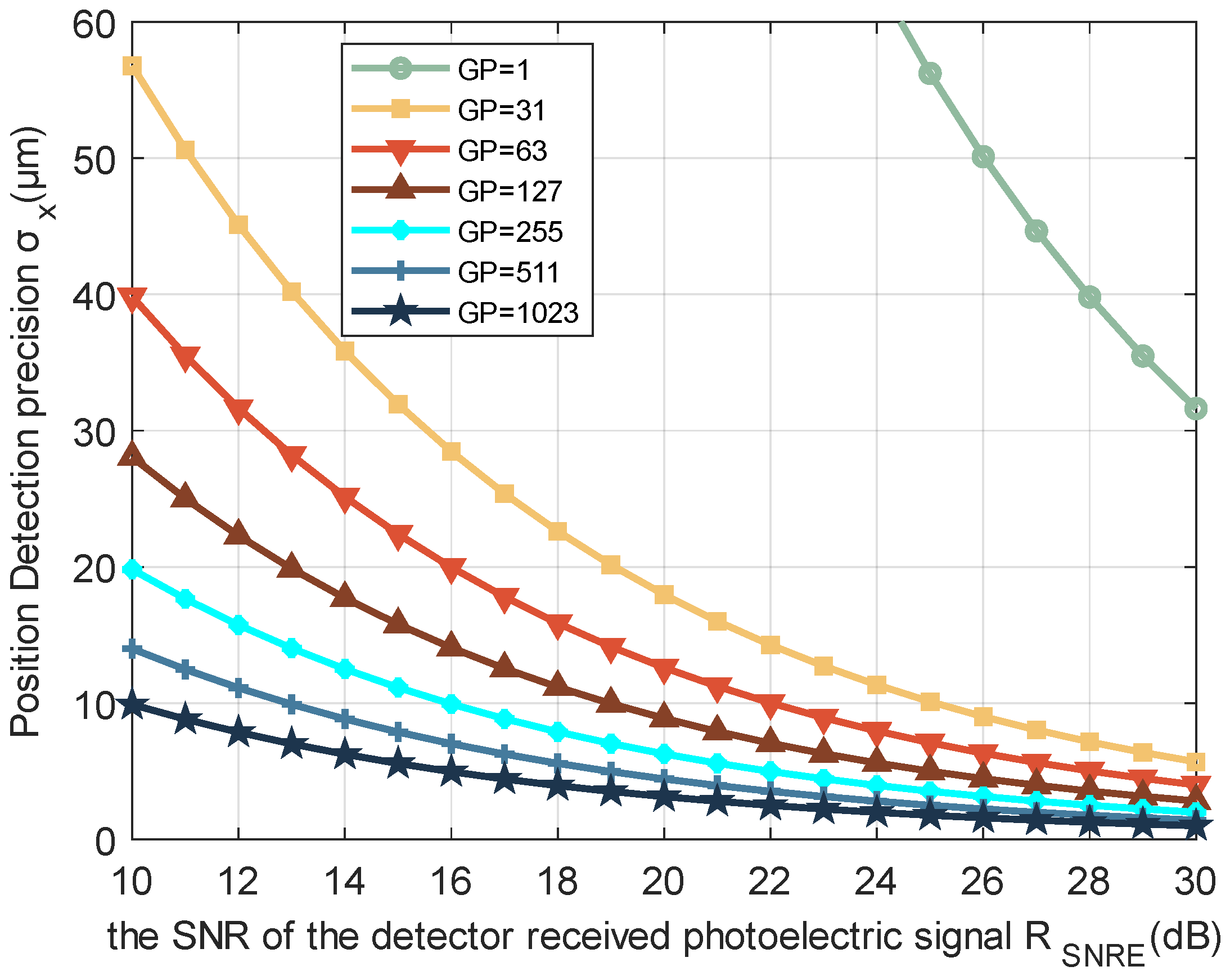
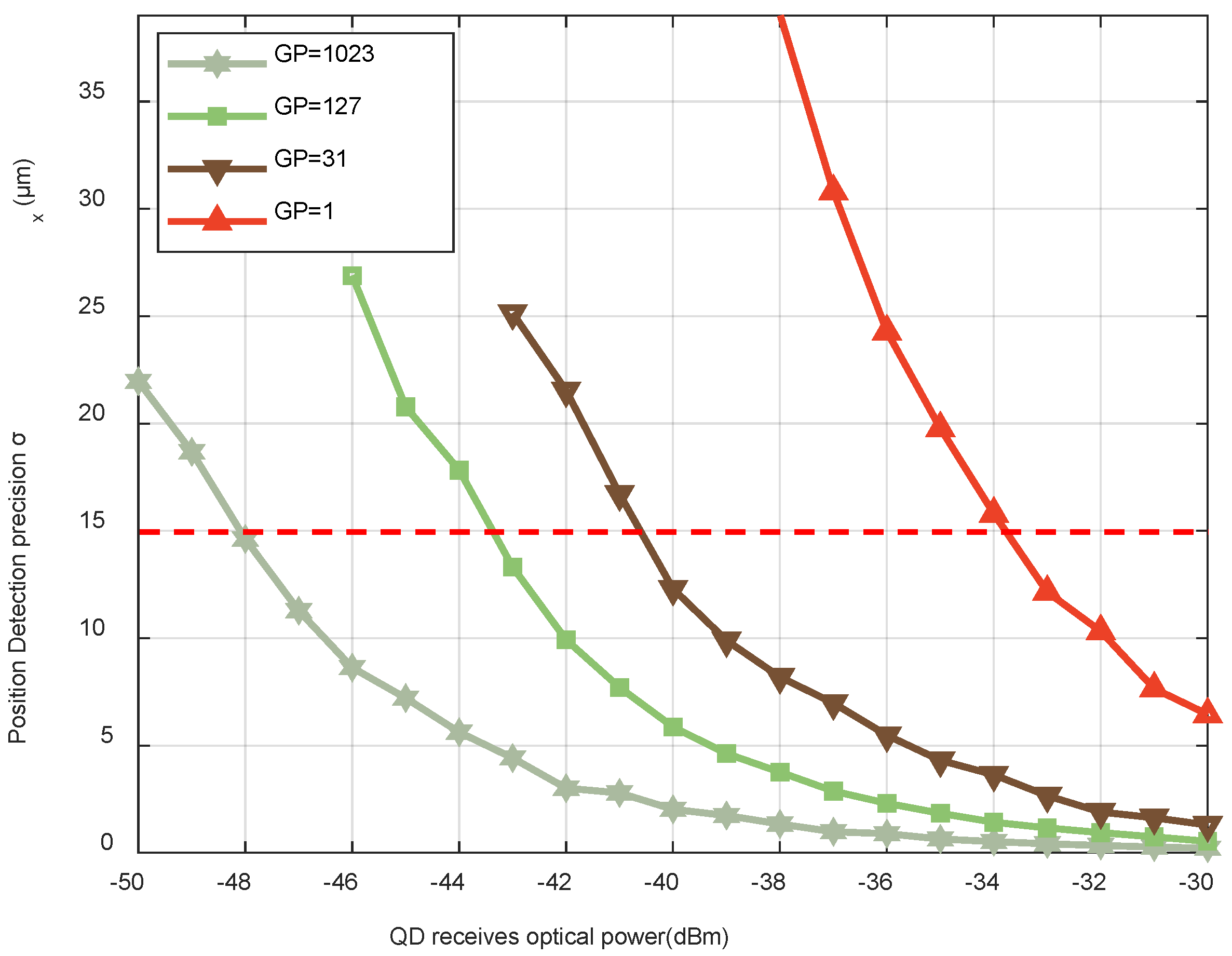
5.2. The Impact of Spread-Spectrum Sequence Depth on Position-Detection Precision
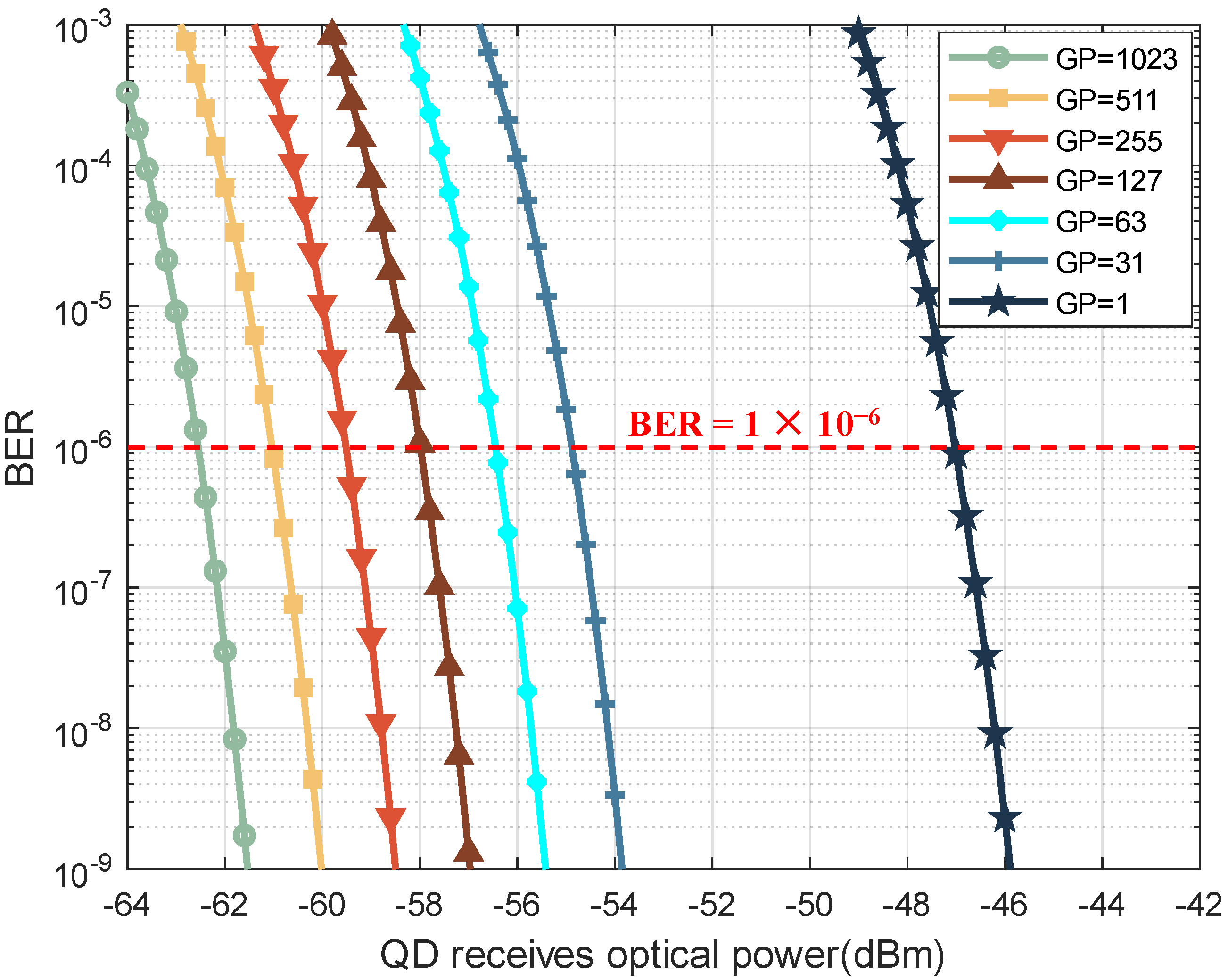
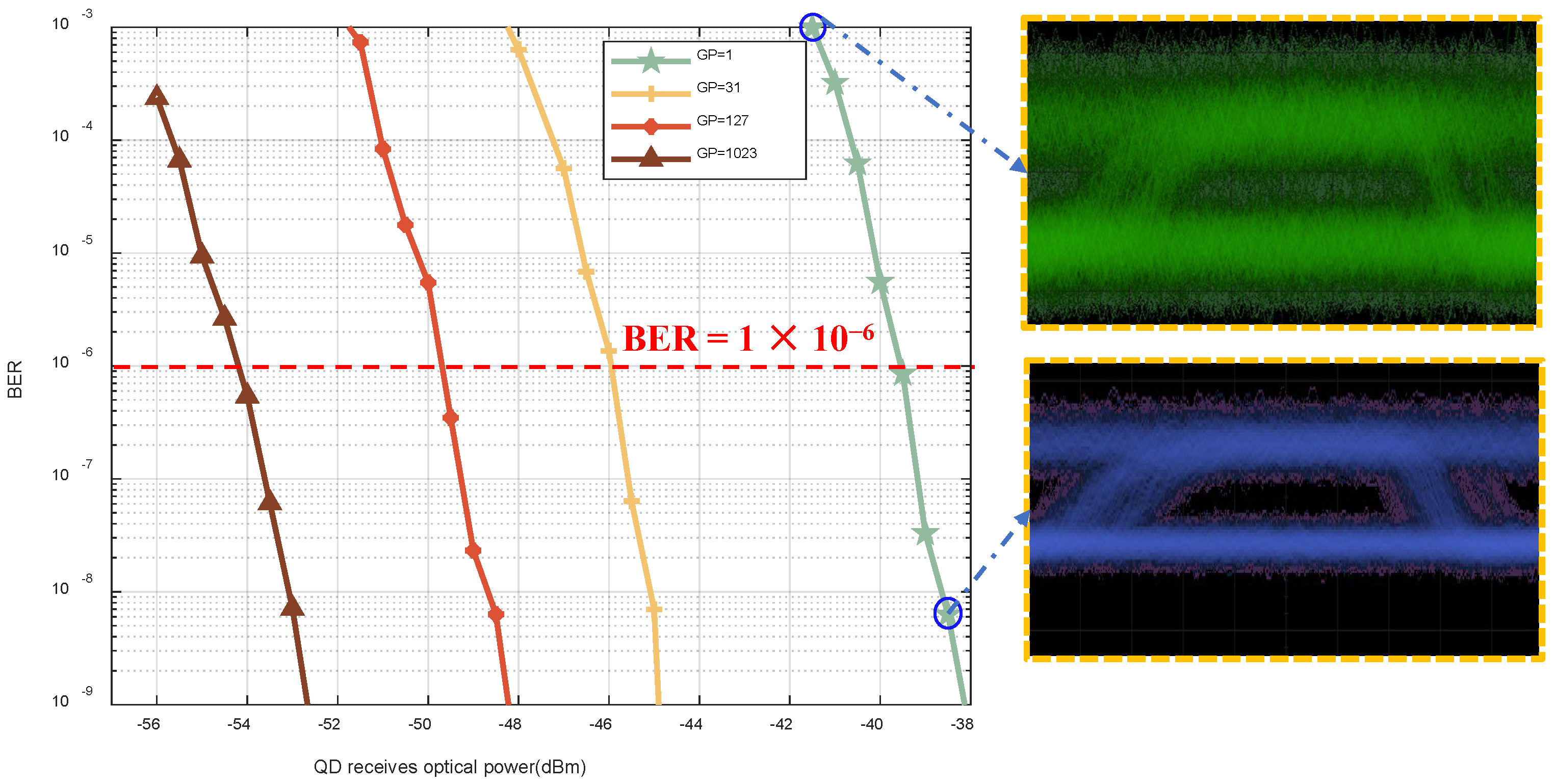
5.3. The Impact of Spread-Spectrum Sequence Depth on System Sensitivity
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pimentel, P.M.; Rödiger, B.; Schmidt, C.; Fuchs, C.; Rochow, C.; Hiemstra, T.; Zager, A.; Wertz, P.; Knopp, M.; Lehmann, M.; et al. Cube laser communication terminal (CubeLCT) state of the art. Acta Astronaut. 2023, 211, 326–332. [Google Scholar] [CrossRef]
- Gao, D.; Li, T.; Sun, Y.; Wang, W.; Hu, H.; Meng, J.; Zheng, Y.; Xie, X. Latest developments and trends of space laser communication. Chin. Opt. 2018, 11, 901–913. [Google Scholar]
- Toyoshima, M. Recent trends in space laser communications for small satellites and constellations. J. Light. Technol. 2021, 39, 693–699. [Google Scholar] [CrossRef]
- Li, R.; Lin, B.; Liu, Y.; Dong, M.; Zhao, S. A survey on laser space network: Terminals, links, and architectures. IEEE Access 2022, 10, 34815–34834. [Google Scholar] [CrossRef]
- Li, L.; Xuejiao, Z.; Jianhua, Z.; Changzhi, X.; Yi, J. Advanced space laser communication technology on cubesats. ZTE Commun. 2021, 18, 45–54. [Google Scholar]
- Jiang, H.L.; Tong, S.F. Space Laser Communication Technology and System; National Defence Industry Press: Beijing, China, 2011; pp. 9–22. [Google Scholar]
- Zhang, W.; Guo, W.; Zhang, C.; Zhang, S. An Improved Method for Spot Position Detection of a Laser Tracking and Positioning System Based on a Four-Quadrant Detector. Sensors 2019, 19, 4722. [Google Scholar] [CrossRef] [PubMed]
- Bao, R.; Yu, D.; Chen, F.; Lv, Z.; Xue, J.; Pan, Q.; Zhang, R. Research on High-Precision Position Detection Based on a Driven Laser Spot in an Extreme Ultraviolet Light Source. Photonics 2024, 11, 75. [Google Scholar] [CrossRef]
- Jiabin, W.; Bo, Z.; Zhiyong, W. Improved measurement accuracy of the spot position on an InGaAs quadrant detector by introducing Boltzmann function. In Proceedings of the 2015 International Conference on Optoelectronics and Microelectronics (ICOM), Changchun, China, 16–18 July 2015; pp. 183–185. [Google Scholar]
- Wang, X.; Su, X.; Liu, G.; Han, J.; Wang, K.; Zhu, W. A Method for Improving the Detection Accuracy of the Spot Position of the Four-Quadrant Detector in a Free Space Optical Communication System. Sensors 2020, 20, 7164. [Google Scholar] [CrossRef] [PubMed]
- Baleya, M.; Shalaby, H.; Kato, K.; Elsabrouty, M. Neural Network Ensemble for Precise Laser Spot Position Determination on a Quadrant Detector. IEEE Photonics Technol. Lett. 2023, 36, 115–118. [Google Scholar] [CrossRef]
- Wang, X.; Su, X.; Liu, G.; Han, J.; Zhu, W.; Liu, Z. Method to improve the detection accuracy of quadrant detector based on neural network. IEEE Photonics Technol. Lett. 2021, 33, 1254–1257. [Google Scholar] [CrossRef]
- Vo, Q.; Zhang, X.; Fang, F. Extended the linear measurement range of four-quadrant detector by using modified polynomial fitting algorithm in micro-displacement measuring system. Opt. Laser Technol. 2019, 112, 332–338. [Google Scholar] [CrossRef]
- Huo, L.; Wu, Z.; Wu, J.; Gao, S.; Chen, Y.; Song, Y.; Wang, S. High-Precision Log-Ratio Spot Position Detection Algorithm with a Quadrant Detector under Different SNR Environments. Sensors 2022, 22, 3092. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, Y.; Geng, T.; Wu, J.; Chen, T. Study on main factors affecting position detection accuracy of four-quadrant detector. Chin. J. Lasers 2015, 42, 1217002. [Google Scholar] [CrossRef]
- Li, Q.; Xu, S.; Yu, J.; Yan, L.; Huang, Y. An improved method for the position detection of a quadrant detector for free space optical communication. Sensors 2019, 19, 175. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Li, Q.; Li, H.; Wang, Q.; Zhou, G.; He, D.; Xu, S.; Xia, Y.; Huang, Y. High-precision light spot position detection in low SNR condition based on quadrant detector. Appl. Sci. 2019, 9, 1299. [Google Scholar] [CrossRef]
- Bai, W.; Zou, X.; Li, P.; Ye, J.; Yang, Y.; Yan, L.; Pan, W.; Yan, L. Photonic millimeter-wave joint radar communication system using spectrum-spreading phase-coding. IEEE Trans. Microw. Theory Tech. 2022, 70, 1552–1561. [Google Scholar] [CrossRef]
- Deshmukh, S.; Bhosle, U. Performance evaluation of spread spectrum system using different modulation schemes. Procedia Comput. Sci. 2016, 85, 176–182. [Google Scholar] [CrossRef][Green Version]
- Elayan, H.; Amin, O.; Shihada, B.; Shubair, R.M.; Alouini, M.-S. Terahertz band: The last piece of RF spectrum puzzle for communication systems. IEEE Open J. Commun. Soc. 2019, 1, 1–32. [Google Scholar] [CrossRef]
- Lyu, W.; Zhao, M.; Chen, X.; Yang, X.; Qiu, Y.; Tong, Z.; Xu, J. Experimental demonstration of an underwater wireless optical communication employing spread spectrum technology. Opt. Express 2020, 28, 10027–10038. [Google Scholar] [CrossRef] [PubMed]
- Lu, T.; Hu, Q.; Xu, D.; Feng, X.; Zhang, Y. Design and Verification of Underwater Electric Field Communication System Based Spread Spectrum Techniques. In Proceedings of the International Conference on Autonomous Unmanned Systems, Xi’an, China, 23–25 September 2022; Springer Nature: Singapore, 2022; pp. 1421–1431. [Google Scholar]
- Zhang, L.; Tang, X.; Sun, C.; Chen, Z.; Li, Z.; Wang, H.; Jiang, R.; Shi, W.; Zhang, A. Over 10 attenuation length gigabits per second underwater wireless optical communication using a silicon photomultiplier (SiPM) based receiver. Opt. Express 2020, 28, 24968–24980. [Google Scholar] [CrossRef] [PubMed]
- Spilker, J.J., Jr.; Axelrad, P.; Parkinson, B.W.; Enge, P. (Eds.) . Global Positioning System: Theory and Applications; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1996; Volume I. [Google Scholar]
- Gavriloaia, G.; Halunga, S.; Narita, R.M. Coarse/Acquisition GPS Codes Correlation Properties and Vulnerability to Noise. In Proceedings of the 2007 8th International Conference on Telecommunications in Modern Satellite, Cable and Broadcasting Services, Nis, Serbia and Montenegro, Nis, Serbia, 26–28 September 2007; pp. 554–557. [Google Scholar] [CrossRef]
- Ndili, A. GPS pseudolite signal design. In Proceedings of the Institute of Navigation GPS-94, Salt Lake City, UT, USA, 20–23 September 1994; pp. 1375–1382. [Google Scholar]
- El-Khamyj, S.E.; Balamesh, A.S.; Morfequ, B.H. On the generation and correlation measurements of Gold codes. Int. J. Electron. 1988, 64, 481–492. [Google Scholar] [CrossRef]
- Sarwate, D.V.; Pursley, M.B. Crosscorrelation properties of pseudorandom and related sequences. Proc. IEEE 1980, 68, 593–619. [Google Scholar] [CrossRef]
- Sharma, A.; Anwar, T.; Sharma, D.K. Simulation of Gold Code Sequences for Spread Spectrum Application. Int. J. Eng. Tech. Res. (IJETR) 2014, 2, 129–132. [Google Scholar]
- Guo, X.; Qian, W.; Gu, G.; Chen, Q.; Cao, E.; Hu, X. Study of laser location based on four-quadrant detector APD. In Advanced Laser Manufacturing Technology; SPIE: Bellingham, WA, USA, 2016; Volume 10153, pp. 153–162. [Google Scholar]
- Cao, W.; Huang, Y.; Fan, K.-C.; Zhang, J. A novel machine learning algorithm for large measurement range of quadrant photodetector. Optik 2021, 227, 165971. [Google Scholar] [CrossRef]
- Reynders, B.; Pollin, S. Chirp spread spectrum as a modulation technique for long range communication. In Proceedings of the 2016 Symposium on Communications and Vehicular Technologies (SCVT), Mons, Belgium, 22 November 2016; pp. 1–5. [Google Scholar]
- Fakatselis, J. Processing gain in spread spectrum signals. Harris Semiconductor application note. 1998.
- Milstein, L.B.; Simon, M.K. Spread spectrum communications. In The Mobile Communications Handbook; CRC Press: Boca Raton, FL, USA, 1999; p. 19990749. [Google Scholar]
- Trichili, A.; Cox, M.A.; Ooi, B.S.; Alouini, M.S. Roadmap to free space optics. JOSA B 2020, 37, A184–A201. [Google Scholar] [CrossRef]
- Basudewa, M.I.; Bagaskara, Z.H.; Damita, S.S.A.; Putra, R.F.; Ahmadi, D. Bit error rate performance analysis for free space optic communication. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2020; Volume 850, p. 012056. [Google Scholar]
- Wang, R.; Yu, X.; Tong, S.; Chen, X.; Wu, T.; Zhao, B. Design of digital tracking and communication composite receiver for four quadrant detector. In Fiber Optic Sensing and Optical Communication; SPIE: Bellingham, WA, USA, 2018; Volume 10849, pp. 196–203. [Google Scholar]
- Yu, X.; Chen, X.; Song, Y.; Zhang, L.; Jiang, J.; Wang, T.; Tong, S. Design and evaluation of a high-sensitivity digital receiver with the finite impulse response filter algorithm for free-space laser communication. Opt. Eng. 2020, 59, 036105. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Name | Description | Variable Name | Description |
|---|---|---|---|
| Average optical power output of the laser | -th quadrant | ||
| Communication data | Takes values of I, II, III, and IV | ||
| PRN data | The responsivity of the QD | ||
| Output optical power signal of the laser | -th quadrant | ||
| Autocorrelation value | -th quadrant | ||
| Period of communication data bits | Transimpedance amplifier gain of the circuit | ||
| Bit period of the PRN | -th quadrant photoelectric signal collected by the ADC | ||
| Clock delay between pseudo-random codes | -th quadrant | ||
| A non-zero integer | Correlation value between the j-th quadrant beacon signal and the PRN | ||
| The depth of the PRN periodic sequence | -th quadrant and the PRN | ||
| Bit width of the PRN register | The relative position coordinates of the optical spot center |
| Pseudocode Sequence Depth | 1 | 31 | 63 | 127 | 255 | 511 | 1023 |
|---|---|---|---|---|---|---|---|
| (dB) | 0 | 14.91 | 17.9 | 21.03 | 24.06 | 27.08 | 30.09 |
| (μm) | 100 | 17.96 | 12.59 | 8.87 | 6.26 | 4.42 | 3.12 |
| 0 | 7.45 | 8.99 | 10.52 | 12.03 | 13.54 | 15.05 |
| Experimental Apparatus | Parameters |
|---|---|
| Quadrant Detector | Model: QA4000-10-TO Responsivity: 36 A/W Active Area: 4000 μm |
| Laser | Model: CTLP-850-002m-4-B-PD Wavelength: 850 nm |
| Fiber Optic Attenuators | Wavelength Range: 780 nm~980 nm |
| Beam Splitter | T:R = 50%:50% |
| ADC | Sampling rate: 65 MSPS |
| FPGA | Model: EP4CE10F17I7N |
| Pseudocode Sequence Depth | Received Optical Power is −34 dBm, (μm) | The Improvement in Position Detection Precision | Received Optical Power is −37 dBm, (μm) | The Improvement in Position-Detection Precision | Theoretical Optimization |
|---|---|---|---|---|---|
| 1 | 15.395 | 1 | 30.811 | 1 | 0 |
| 31 | 3.641 | 6.26 | 7.275 | 6.26 | 7.45 |
| 127 | 1.425 | 10.33 | 2.876 | 10.29 | 10.52 |
| 1023 | 0.525 | 14.67 | 0.983 | 14.96 | 15.05 |
| Pseudocode Sequence Depth | Received Optical Power (dBm) | Comparison of Detection Sensitivity Improvement with Direct Detection (dB) | Theoretical Sensitivity Improvement (dB) |
|---|---|---|---|
| 1 | −39.6 | 0 | 0 |
| 31 | −46 | 6.4 | 7.45 |
| 127 | −49.7 | 10.1 | 10.51 |
| 1023 | −54.2 | 14.6 | 15.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Yu, X.; Ye, J.; Lin, P.; Zhang, Z.; Wang, T.; Xu, L. High-Precision Position Detection and Communication Fusion Technology Using Beacon Spread-Spectrum Modulation with Four-Quadrant Detector. Appl. Sci. 2024, 14, 3362. https://doi.org/10.3390/app14083362
Chen S, Yu X, Ye J, Lin P, Zhang Z, Wang T, Xu L. High-Precision Position Detection and Communication Fusion Technology Using Beacon Spread-Spectrum Modulation with Four-Quadrant Detector. Applied Sciences. 2024; 14(8):3362. https://doi.org/10.3390/app14083362
Chicago/Turabian StyleChen, Shuai, Xiaonan Yu, Jingmei Ye, Peng Lin, Ziqi Zhang, Tong Wang, and Li Xu. 2024. "High-Precision Position Detection and Communication Fusion Technology Using Beacon Spread-Spectrum Modulation with Four-Quadrant Detector" Applied Sciences 14, no. 8: 3362. https://doi.org/10.3390/app14083362
APA StyleChen, S., Yu, X., Ye, J., Lin, P., Zhang, Z., Wang, T., & Xu, L. (2024). High-Precision Position Detection and Communication Fusion Technology Using Beacon Spread-Spectrum Modulation with Four-Quadrant Detector. Applied Sciences, 14(8), 3362. https://doi.org/10.3390/app14083362