
Unconditionally Stable System Incorporated Factorization-Splitting Algorithm for Blackout Re-Entry Vehicle
Abstract
:1. Introduction
2. Formulation
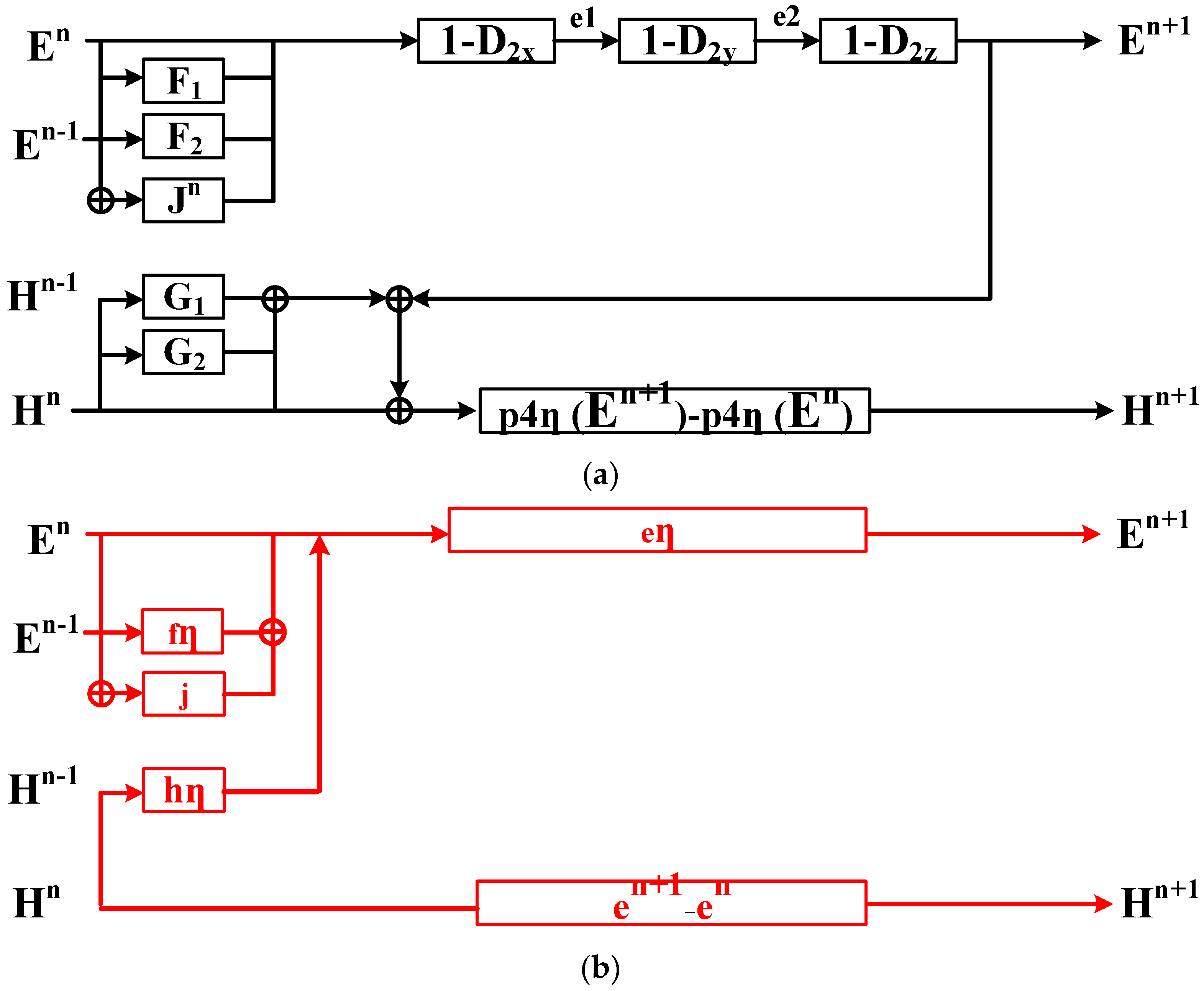
2.1. Modified ADE Algorithm for Unconditionally Stable SI Scheme
2.2. consumption, simulation duration, and time CPML Formulation
3. Numerical Results and Discussion
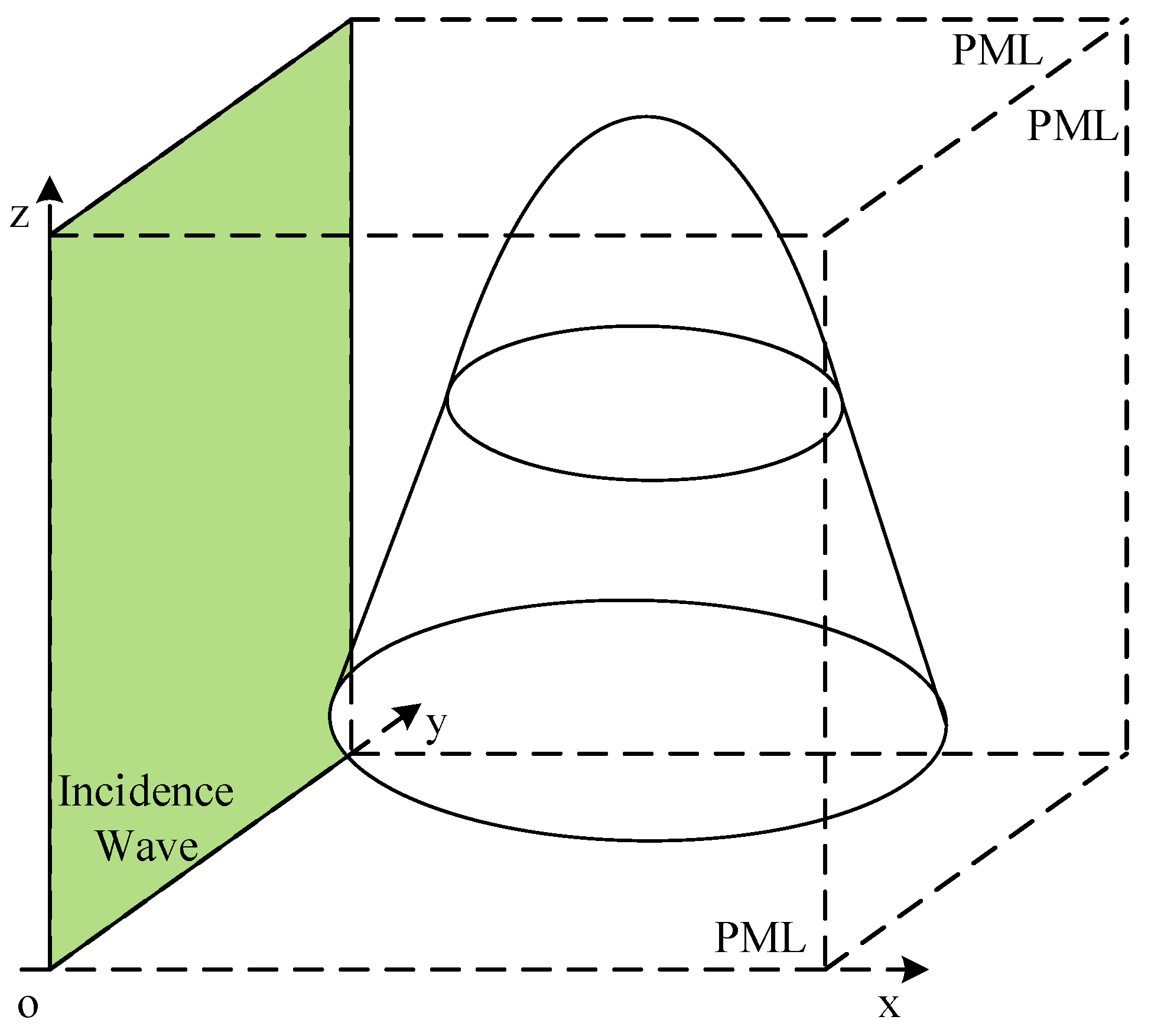
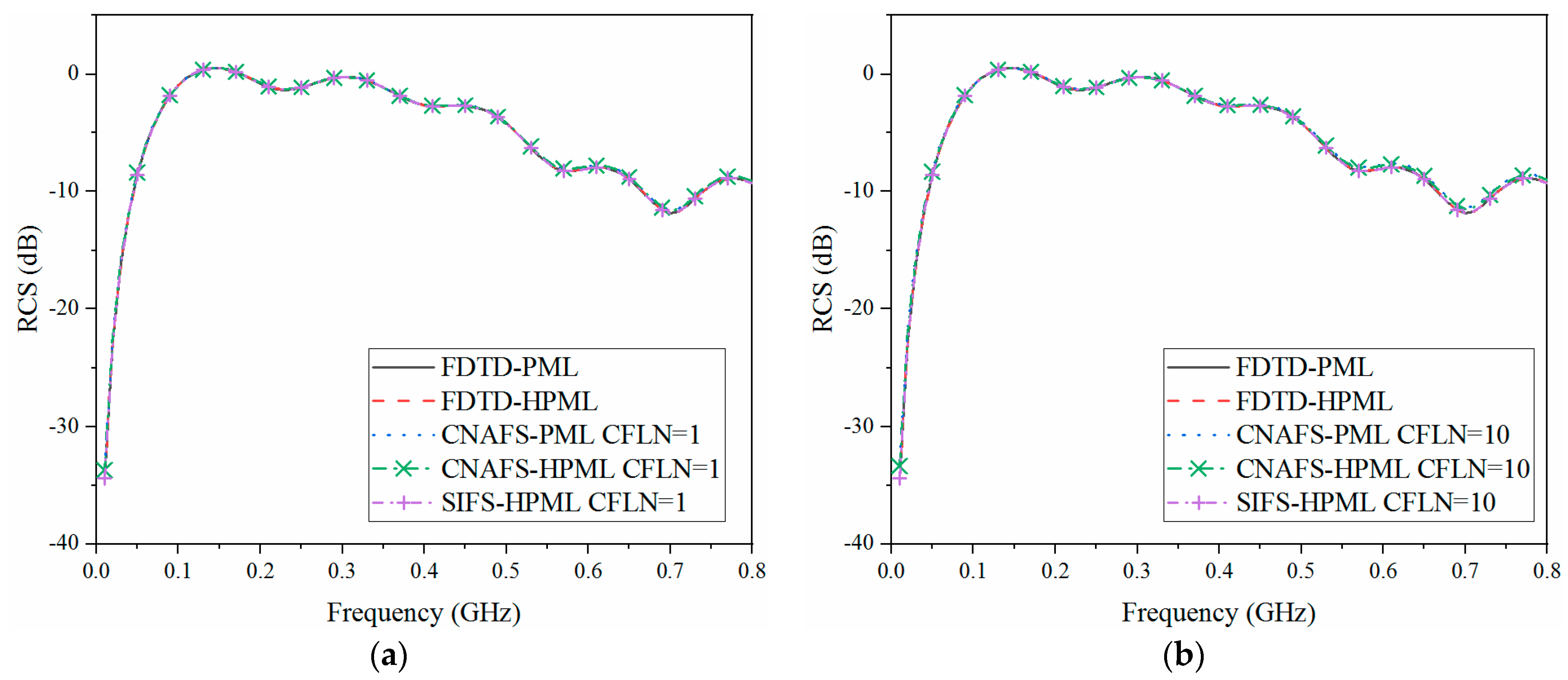
3.1. Target Characteristic Problem: Radar Echo Wave of the Blackout Re-Entry Vehicle
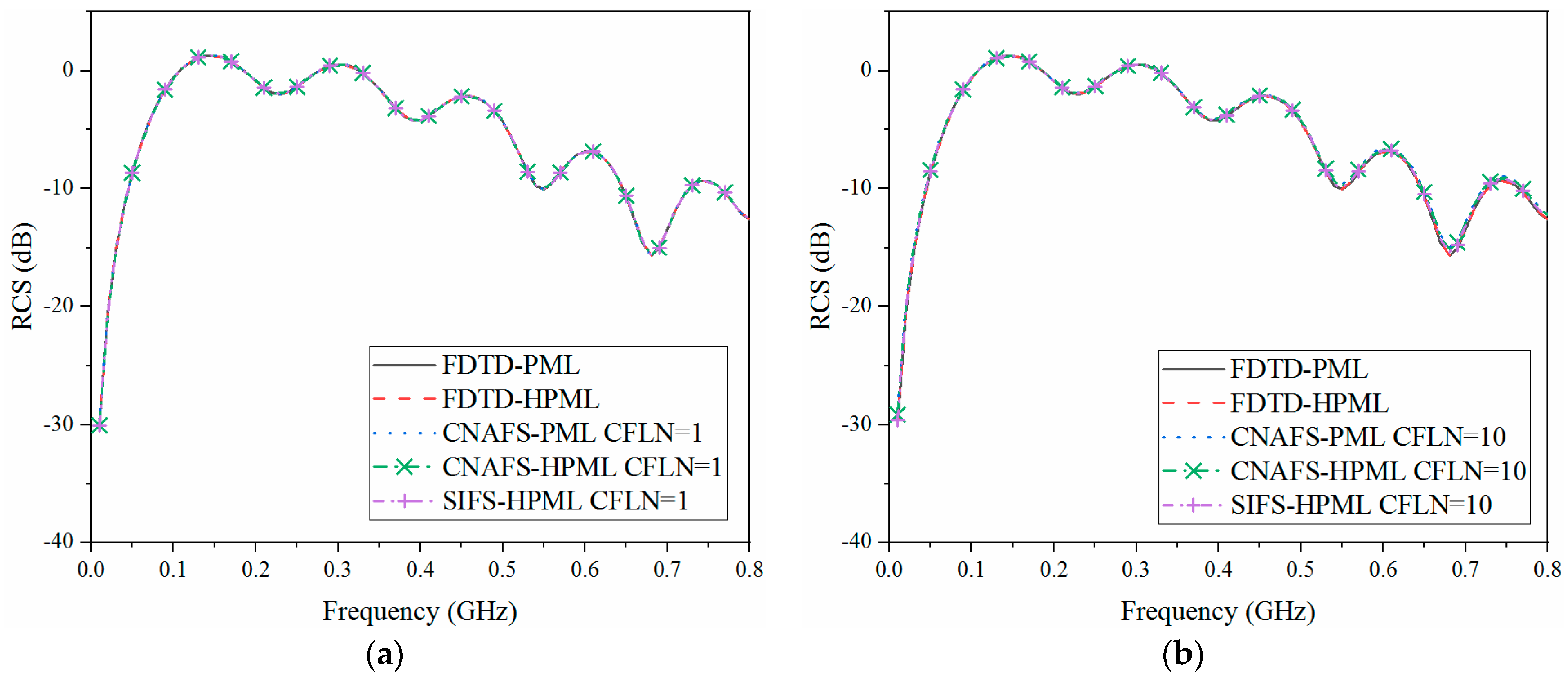
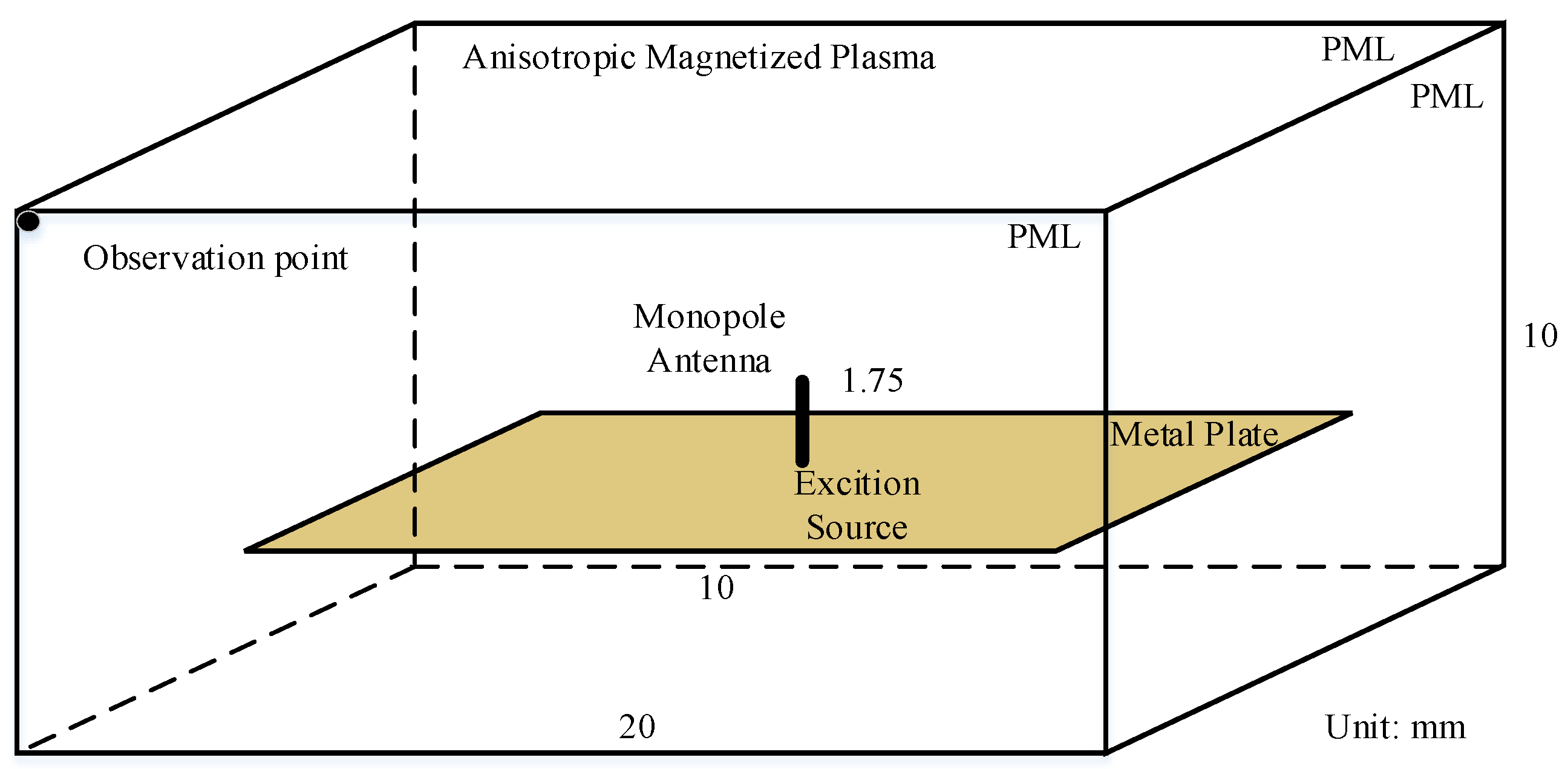
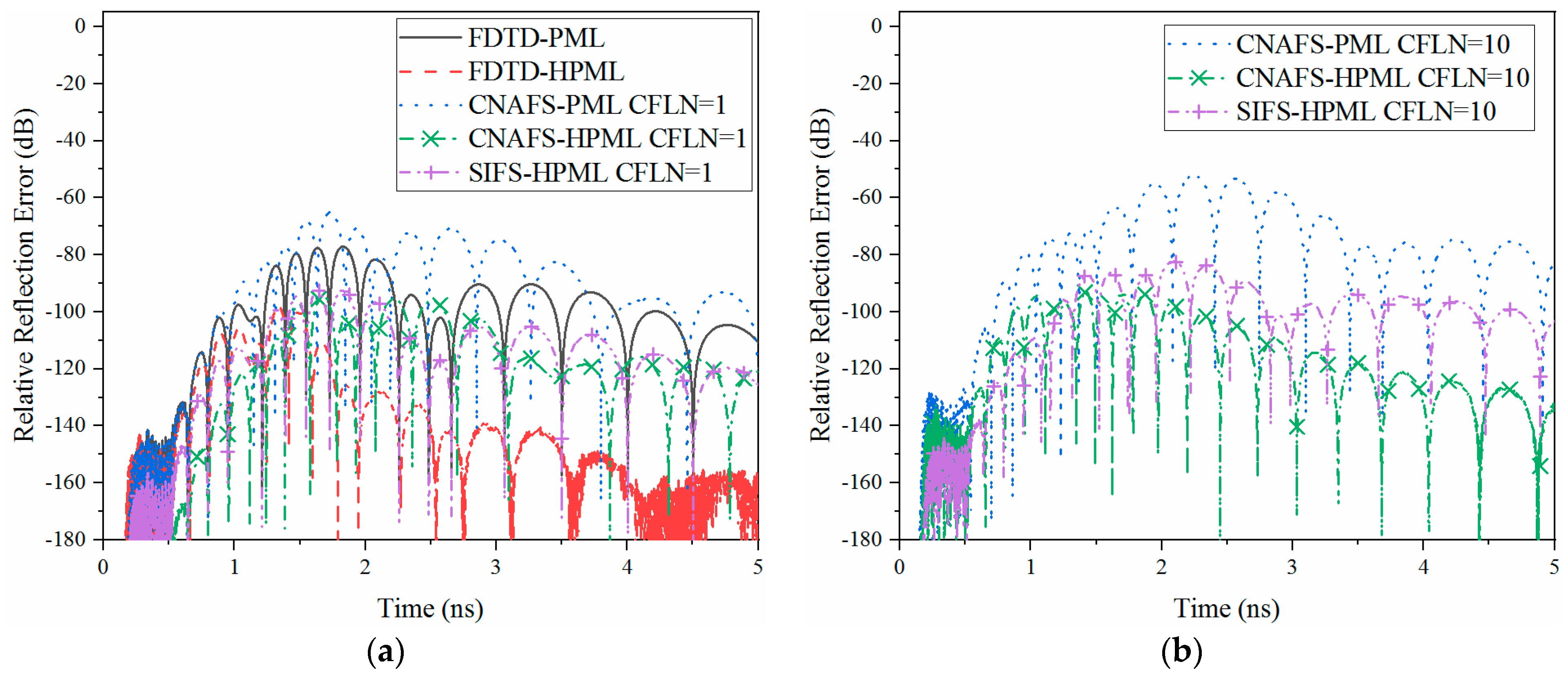
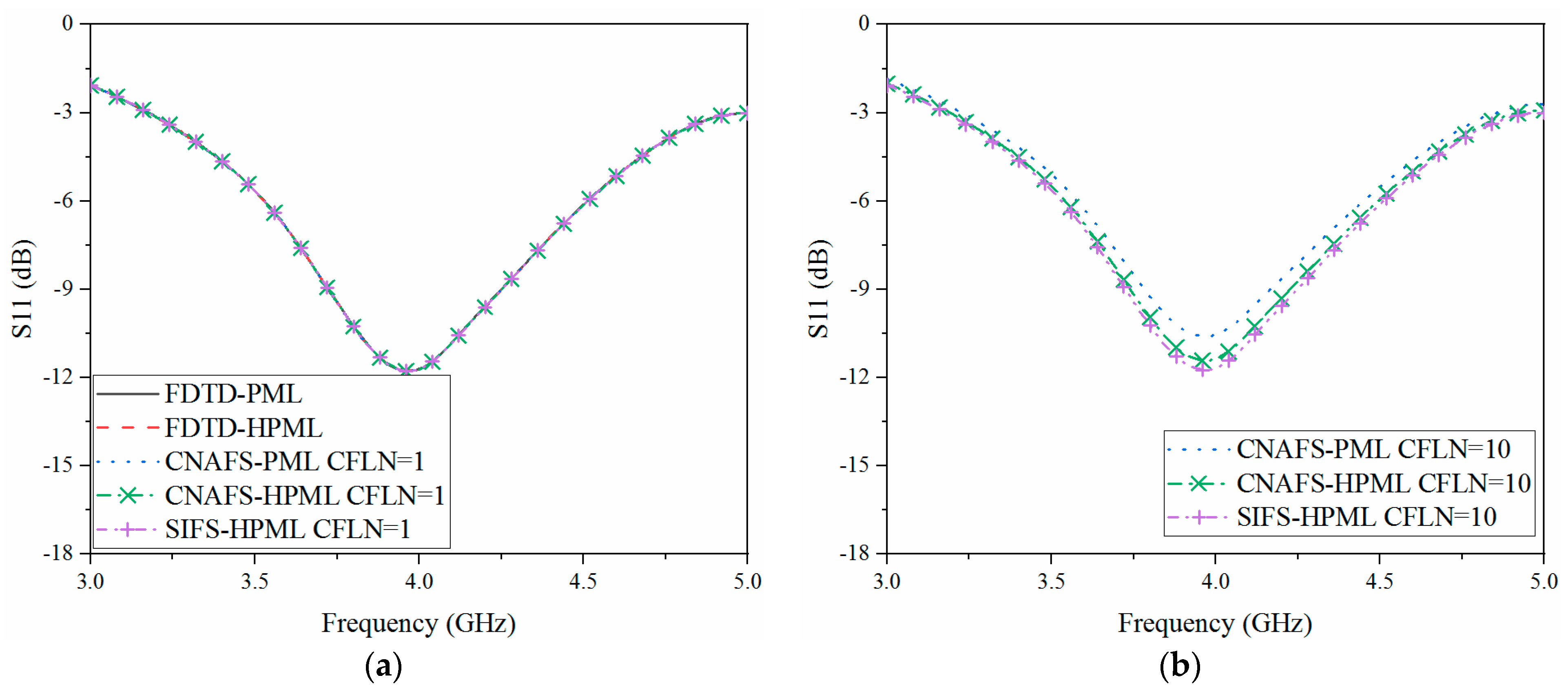
3.2. Wave Radiation Problem: Antenna Communication in the Plasma Sheath on the Surface of the Blackout Re-Entry Vehicle
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
References
- Takahashi, Y.; Nakasato, R.; Oshima, N. Analysis of Radio Frequency Blackout for a Blunt-Body Capsule in Atmospheric Reentry Missions. Aerospace 2016, 3, 2. [Google Scholar] [CrossRef]
- Webb, B.A.; Ziolkowski, R.W. A Metamaterial-Inspired Approach to Mitigating Radio Frequency Blackout When a Plasma Forms Around a Reentry Vehicle. Photonics 2020, 7, 88. [Google Scholar] [CrossRef]
- Yu, M.; Qiu, Z.; Lv, B.; Takahashi, Y. Multiphysics Mathematical Modeling and Flow Field Analysis of an Inflatable Membrane Aeroshell in Suborbital Reentry. Mathematics 2022, 10, 832. [Google Scholar] [CrossRef]
- Niu, G.; Liu, Y.; Bai, B.; Ding, Y.; Song, L.; Li, X. Polarization Scattering Characteristic of Plasma-Sheath-Covered Hypersonic Vehicle. IEEE Trans. Plasma Sci. 2023, 51, 641–648. [Google Scholar] [CrossRef]
- Wang, S.; Guo, L.-X.; Yu, Z.-F.; Wang, J.; Chen, J. Method of 2-D Range-Doppler Imaging for Plasma Wake Based on Range Walk Correction. IEEE Trans. Plasma Sci. 2023, 51, 1076–1084. [Google Scholar] [CrossRef]
- Ding, Y.; Bai, B.; Li, X.; Niu, G.; Liu, Y. Research on EM Shielding Mechanism of the Plasma-Sheath-Covered Target. IEEE Trans. Plasma Sci. 2023, 51, 632–640. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, S.; Song, Z.; Ma, J.; Jiang, T. Fast Analysis of the Electromagnetic Scattering of Targets Coated with Plasma Sheath Based on IBC. IEEE Antennas Wirel. Propag. Lett. 2021, 21, 491–495. [Google Scholar] [CrossRef]
- Liu, S.-H.; Guo, L.-X. Analyzing the Electromagnetic Scattering Characteristics for 3-D Inhomogeneous Plasma Sheath Based on PO Method. IEEE Trans. Plasma Sci. 2016, 44, 2838–2843. [Google Scholar] [CrossRef]
- Yee, K.S. Numerical solution of initial boundary value problems involving maxwell’s equations in isotropic media. IEEE Trans. Antennas Propag. 1966, 14, 302–307. [Google Scholar]
- Taflove, A.; Hagness, S.C. Computational Electrodynamics: The Finite-Difference Time Domain Method, 3rd ed.; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Namiki, T. 3-D ADI-FDTD method-unconditionally stable time-domain algorithm for solving full vector Maxwell’s equations. IEEE Trans. Microw. Theory Tech. 2000, 48, 1743–1748. [Google Scholar] [CrossRef]
- Shibayama, J.; Nomura, A.; Ando, R.; Yamauchi, J.; Nakano, H. A Frequency-Dependent LOD-FDTD Method and Its Application to the Analyses of Plasmonic Waveguide Devices. IEEE J. Quantum Electron. 2009, 46, 40–49. [Google Scholar] [CrossRef] [Green Version]
- Chu, Q.; Kong, Y.-D. Three New Unconditionally-Stable FDTD Methods with High-Order Accuracy. IEEE Trans Antennas Propag. 2009, 57, 2675–2682. [Google Scholar]
- Chen, J.; Wang, J. A Three-Dimensional Semi-Implicit FDTD Scheme for Calculation of Shielding Effectiveness of Enclosure with Thin Slots. IEEE Trans. Electromagn. Compat. 2007, 49, 354–360. [Google Scholar] [CrossRef]
- Tan, E.L. From Time-Collocated to Leapfrog Fundamental Schemes for ADI and CDI FDTD Methods. Axioms 2022, 11, 23. [Google Scholar] [CrossRef]
- Pereda, J.A.; Serroukh, A.; Grande, A.; Vegas, A. Implementation of Absorbing Boundary Conditions Based on the Second-Order One-Way Wave Equation in the LOD- and the ADI-FDTD Methods. IEEE Antennas Wirel. Propag. Lett. 2012, 11, 981–983. [Google Scholar] [CrossRef]
- Tan, E.L. Fundamental Leapfrog ADI and CDI FDTD Methods. In Proceedings of the 2021 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting (APS/URSI), Singapore, 4–10 December 2021; pp. 643–644. [Google Scholar]
- Wang, X.-H.; Yin, W.-Y.; Chen, Z.D. One-step leapfrog ADI-FDTD method for anisotropic magnetized plasma. In Proceedings of the 2013 IEEE MTT-S International Microwave Symposium Digest (MTT), Seattle, WA, USA, 2–7 June 2013; pp. 1–4. [Google Scholar]
- Li, Y.; Wang, N.; Lei, J.; Wang, F.; Li, C. Modeling GPR Wave Propagation in Complex Underground Structures Using Conformal ADI-FDTD Algorithm. Appl. Sci. 2022, 12, 5219. [Google Scholar] [CrossRef]
- Liu, S.; Tan, E.L.; Zou, B.; Zhang, L. Higher Order CPML for Leapfrog Complying-Divergence Implicit FDTD Method and Its Numerical Properties. IEEE Trans. Microw. Theory Tech. 2022, 71, 522–535. [Google Scholar] [CrossRef]
- Sun, G.; Trueman, C.W. Approximate Crank-Nicolson scheme for the 2-D finite-difference time-domain method for TEz waves. IEEE Trans. Antennas Propag. 2004, 52, 2963–2972. [Google Scholar] [CrossRef]
- Sun, G.; Trueman, C.W. Unconditionally stable Crank-Nicolson scheme for solving two-dimensional Maxwell’s equations. Electron. Lett. 2003, 39, 595–597. [Google Scholar] [CrossRef]
- Wu, P.; Xie, Y.; Jiang, H.; Niu, L. Higher-Order Approximate CN-PML Theory for Magnetized Ferrite Simulations. Adv. Theory Simul. 2020, 3, 1900221. [Google Scholar] [CrossRef]
- Sun, G.; Trueman, C. Unconditionally-stable FDTD method based on Crank-Nicolson scheme for solving three-dimensional Maxwell equations. Electron. Lett. 2004, 40, 589–590. [Google Scholar] [CrossRef]
- Sun, G.; Trueman, C. Efficient implementations of the Crank-Nicolson scheme for the finite-difference time-domain method. IEEE Trans. Microw. Theory Tech. 2006, 54, 2275–2284. [Google Scholar] [CrossRef]
- Wu, P.; Wang, J.; Chen, J.; Jiang, H.; Xie, Y.; Natsuki, T. System incorporated direct-splitting algorithm for periodic nonuniform metamaterial design in open regions. Optik 2022, 271, 169812. [Google Scholar] [CrossRef]
- Wu, P.; Xie, Y.; Jiang, H.; Natsuki, T. Complex Envelope Approximate CN-PML Algorithm with Improved Absorption. IEEE Ante. Wirel. Propagat. Lett. 2020, 19, 1521–1525. [Google Scholar] [CrossRef]
- Wu, P.; Xie, Y.; Jiang, H.; Di, H.; Natsuki, T. Implicit Approximate Crank–Nicolson Theory for Anisotropic Ferrite Structure Simulation with Enhanced Absorption. Adv. Theory Simul. 2021, 4, 2000309. [Google Scholar] [CrossRef]
- Rezaee, M.R.; Niknam, A.; Ghomi, H.; Latifi, H. Magnetized plasma sheath dynamics in plasma source ion implantation. In Proceedings of the 2008 IEEE 35th International Conference on Plasma Science, Karlsruhe, Germany, 15–19 June 2008; p. 1. [Google Scholar] [CrossRef]
- Fang, Y.; Xi, X.-L.; Liu, J.-F.; Pu, Y.-R.; Zhang, J.-S. An Iterative WLP-FDTD Method for Wave Propagation in Magnetized Plasma. IEEE Trans. Plasma Sci. 2017, 45, 2215–2219. [Google Scholar] [CrossRef]
- Liu, S.; Liu, S. Runge-Kutta exponential time differencing FDTD method for anisotropic magnetized plasma. IEEE Antennas Wirel. Propag. Lett. 2008, 7, 306–309. [Google Scholar]
- Xu, L.; Yuan, N. JEC-FDTD for 2-D conducting cylinder coated by anisotropic magnetized plasma. IEEE Microw. Wirel. Compon. Lett. 2005, 15, 892–894. [Google Scholar] [CrossRef]
- Samimi, A.; Simpson, J.J. An Efficient 3-D FDTD Model of Electromagnetic Wave Propagation in Magnetized Plasma. IEEE Trans. Antennas Propag. 2015, 63, 269–279. [Google Scholar] [CrossRef]
- Berenger, J.P. A perfectly matched layer for the absorption of electromagnetic waves. J. Com. Phys. 1994, 11, 185–200. [Google Scholar] [CrossRef]
- Chew, W.C.; Weedon, W.H. A 3D perfectly matched medium from modified maxwell’s equations with stretched coordinates. Microw. Opt. Technol. Lett. 1994, 7, 599–604. [Google Scholar] [CrossRef]
- Kuzuoglu, M.; Mittra, R. Frequency dependence of the constitutive parameters of causal perfectly matched anisotropic absorbers. IEEE Microw. Guid. Wave Lett. 1996, 6, 447–449. [Google Scholar] [CrossRef]
- Gedney, S.; Liu, G.; Roden, J.; Zhu, A. Perfectly matched layer media with CFS for an unconditionally stable ADI-FDTD method. IEEE Trans. Antennas Propag. 2001, 49, 1554–1559. [Google Scholar] [CrossRef]
- Correia, D.; Jin, J.-M. Performance of regular PML, CFS-PML, and second-order PML for waveguide problems. Microw. Opt. Technol. Lett. 2006, 48, 2121–2126. [Google Scholar] [CrossRef]
- Berenger, J.P. Perfectly Matched Layer (PML) for Computational Electromagnetics; Morgan & Claypool: San Rafael, CA, USA, 2007. [Google Scholar]
- Giannopoulos, A. Higher-Order Convolution PML (CPML) for FDTD Electromagnetic Modeling. IEEE Trans. Antennas Propag. 2020, 68, 6226–6231. [Google Scholar] [CrossRef]
- Wu, S.; Sun, Y.; Chi, M.; Chen, X. Performance enhanced absorbing boundary condition for electromagnetic modelling and simulation. Int. J. Numer. Model. Electron. Netw. Devices Fields 2020, 33, e2760. [Google Scholar] [CrossRef]
- Wu, P.; Xie, Y.; Jiang, H.; Niu, L. Different implementations of material independent multi-order nearly perfectly matched layers for EM simulations. Microw. Opt. Technol. Lett. 2020, 62, 3485–3498. [Google Scholar] [CrossRef]
- Wu, P.; Wang, X.; Xie, Y.; Jiang, H.; Natsuki, T. Hybrid Implicit-Explicit Procedure With Improved Absorption for Anisotropic Magnetized Plasma in Bandpass Problem. IEEE J. Multiscale Multiphysics Comput. Tech. 2021, 6, 229–238. [Google Scholar] [CrossRef]
- Wu, P.Y.; Jiang, H.L.; Xie, Y.J.; Niu, L.Q. Three-Dimensional Higher Order PML Based on Alternating Direction Implicit Algorithm. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 2592–2596. [Google Scholar] [CrossRef]
- Yu, Y.; Li, Q.; Liu, E.; Png, C.E.; Su, X. Simulation of dispersive plasmas using implicit and explicit ADE-FDTD schemes. In Proceedings of the 2015 IEEE 4th Asia-Pacific Conference on Antennas and Propagation (APCAP), Bali, Indonesia, 30 June–3 July 2015; pp. 128–129. [Google Scholar] [CrossRef]
- Wu, P.; Xie, Y.; Jiang, H.; Zhang, J.; Chen, J.; Natsuki, T. Complex Envelope Weaker HIE with Higher Order PML Algorithm for FDTD Simulation. IEEE Microw. Wirel. Technol. Lett. 2023, 33, 251–254. [Google Scholar] [CrossRef]
- Teixeira, M.; Rodriguez, D. A novel derivation of the Agarwal-Cooley fast cyclic convolution algorithm based on the Good-Thomas Prime Factor algorithm. In Proceedings of the 38th Midwest Symposium on Circuits and Systems, Rio de Janeiro, Brazil, 13–16 August 1995; Volume 1, pp. 89–91. [Google Scholar]
- Jiang, H.L.; Wu, L.T.; Zhang, X.G.; Wang, Q.; Wu, P.Y.; Liu, C.; Cui, T.J. Computationally Efficient CN-PML for EM Simulations. IEEE Trans. Microw. Theory Tech. 2019, 67, 4646–4655. [Google Scholar] [CrossRef]
- Wu, P.; Xie, Y.; Jiang, H.; Natsuki, T. Performance Enhanced Crank-Nicolson Boundary Conditions for EM Problems. IEEE Trans. Antennas Propag. 2020, 69, 1513–1527. [Google Scholar] [CrossRef]
- Haolin, J.; Yongjun, X.; Peiyu, W.; Jianfeng, Z.; Liqiang, N. Unsplit-field higher-order nearly PML for arbitrary media in EM simulation. J. Syst. Eng. Electron. 2021, 32, 1–6. [Google Scholar] [CrossRef]
- Li, J.; Yang, Q.; Niu, P.; Feng, N. An efficient implementation of the higher-order PML based on the Z-transform method. In Proceedings of the 2011 IEEE International Conference on Microwave Technology & Computational Electromagnetics, Beijing, China, 22–25 May 2011; pp. 414–417. [Google Scholar] [CrossRef]
- Jiang, H.L.; Cui, T.J. Efficient PML Implementation for Approximate CN-FDTD Method. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 698–701. [Google Scholar] [CrossRef]
- Niu, L.; Xie, Y.; Gao, J.; Wu, P.; Jiang, H. Approximate Crank–Nicolson Algorithm with Higher-Order PML Implementation for Plasma Simulation in Open Region Problems. Int. J. Antennas Propag. 2021, 2021, 6618492. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | CFLN | Steps | Memory (G) | Time (min) | Reduction (%) |
|---|---|---|---|---|---|
| FDTD-PML | 1 | 32768 | 27.5 | 43.4 | - |
| FDTD-HPML | 1 | 32768 | 35.9 | 91.7 | −111.3 |
| CNAFS-PML | 1 | 32768 | 40.4 | 372.3 | −757.8 |
| CNAFS-HPML | 1 | 32768 | 53.1 | 440.1 | −1006.2 |
| SIFS-HPML | 1 | 32768 | 47.3 | 389.5 | −785.9 |
| CNAFS-PML | 10 | 3277 | 40.4 | 21.9 | 49.5 |
| CNAFS-HPML | 10 | 3277 | 53.1 | 26.4 | 39.2 |
| SIFS-HPML | 10 | 3277 | 47.3 | 22.1 | 49.1 |
| Algorithms | CFLN | Steps | Memory (G) | Time (min) | Reduction (%) |
|---|---|---|---|---|---|
| FDTD-PML | 1 | 32768 | 1.1 | 4.7 | - |
| FDTD-HPML | 1 | 32768 | 1.9 | 22.3 | −377.5 |
| CNAFS-PML | 1 | 32768 | 2.5 | 75.1 | −1497.9 |
| CNAFS-HPML | 1 | 32768 | 3.0 | 90.4 | −1823.4 |
| SIFS-HPML | 1 | 32768 | 2.6 | 81.6 | −1636.2 |
| CNAFS-PML | 10 | 3277 | 2.5 | 2.6 | 44.7 |
| CNAFS-HPML | 10 | 3277 | 3.0 | 4.1 | 12.8 |
| SIFS-HPML | 10 | 3277 | 2.3 | 3.3 | 29.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, Y.; Wang, J.; Xu, H. Unconditionally Stable System Incorporated Factorization-Splitting Algorithm for Blackout Re-Entry Vehicle. Electronics 2023, 12, 2892. https://doi.org/10.3390/electronics12132892
Wen Y, Wang J, Xu H. Unconditionally Stable System Incorporated Factorization-Splitting Algorithm for Blackout Re-Entry Vehicle. Electronics. 2023; 12(13):2892. https://doi.org/10.3390/electronics12132892
Chicago/Turabian StyleWen, Yi, Junxiang Wang, and Hongbing Xu. 2023. "Unconditionally Stable System Incorporated Factorization-Splitting Algorithm for Blackout Re-Entry Vehicle" Electronics 12, no. 13: 2892. https://doi.org/10.3390/electronics12132892