
Tensor Product Alternatives for Nonlinear Field-Oriented Control of Induction Machines



Abstract
1. Introduction
- Defining the state-space model;
- Finding the optimal polytopic model (TP model in this paper);
- Deriving the controller.
2. Materials and Methods
2.1. Tensor Product Model Transformation
2.2. Induction Machine Model
2.3. Model Parameters
- Number of pole pairs, ;
- Stator resistance, ;
- Rotor resistance, ;
- Stator self inductance, ;
- Rotor self inductance, ;
- Mutual inductance, ;
- Moment of inertia, ;
- Viscous friction coefficient, .
2.4. Model Discretization Parameters
- The problem region for models 0, 4, 16, and 20 is
- The problem region for models 8, 9, 10, 11, 12, and 13 is
- The problem region for models 1, 2, 3, 5, 17, 18, 19, 21, 24, 25, 26, 27, 28, and 29 is
- The problem region for models 6, 7, 22, 23, 30, and 31 is
- The problem region for models 14 and 15 is
- , ;
- , ;
- , ;
- , ;
- , .
2.5. Tensor Product-Based Controller Design
2.5.1. Reference and Disturbance Data
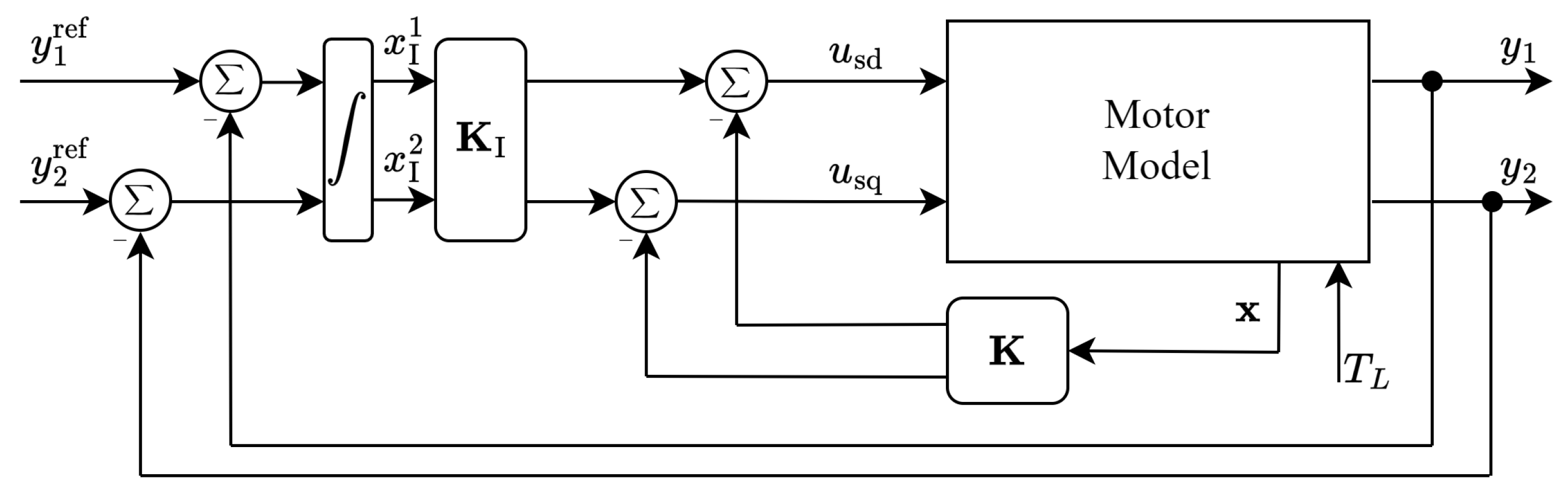
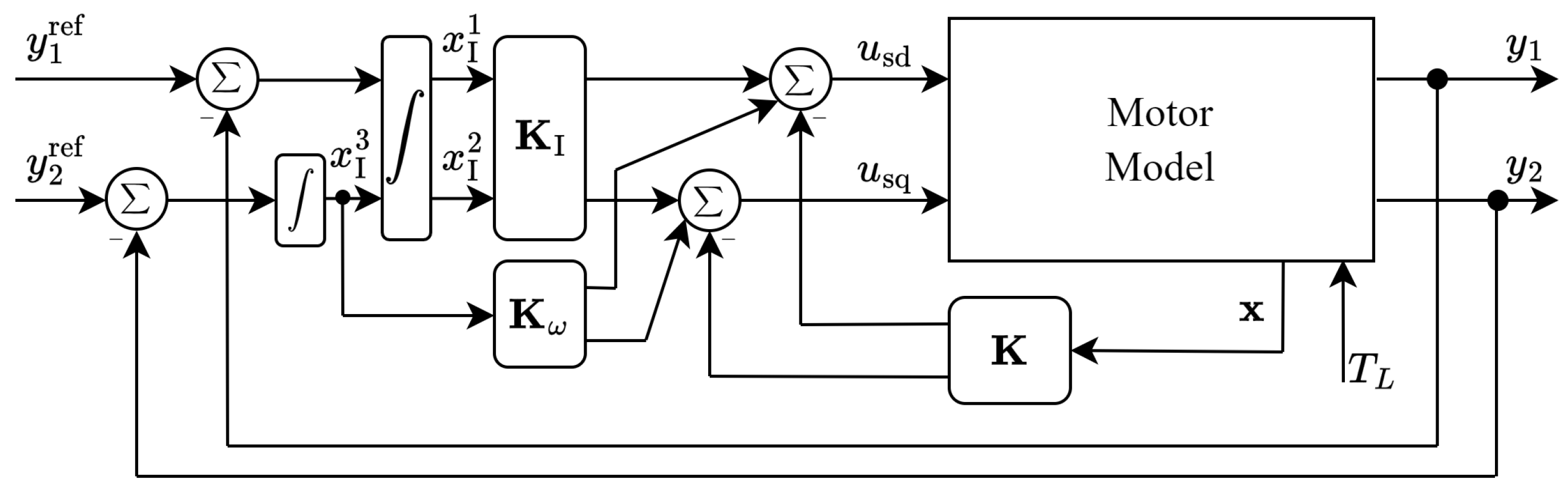
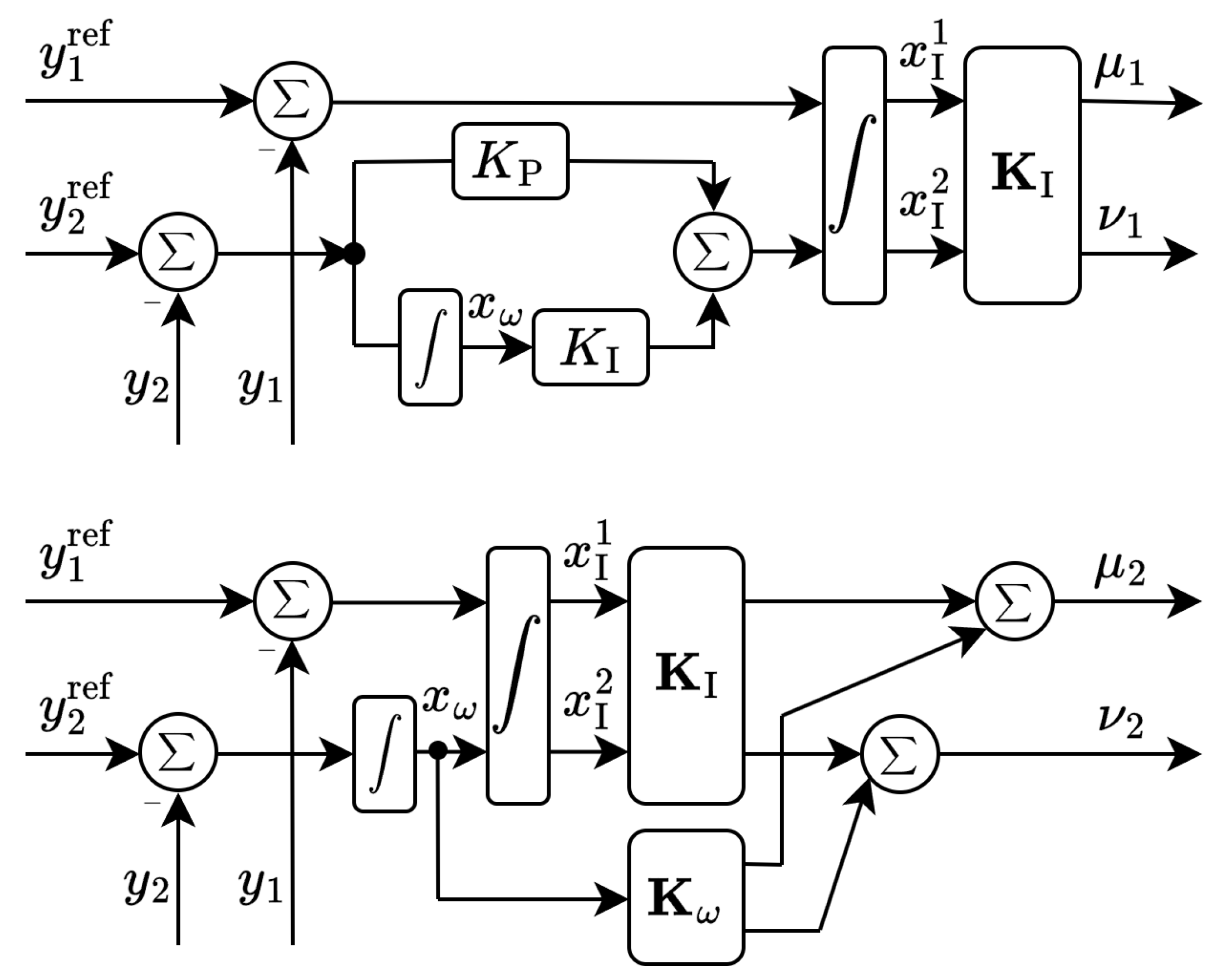
2.5.2. Controller Block Diagrams
- The torque control scheme
- The speed control scheme
2.5.3. Controller Design
- Define the motor parameters, references, and other data such as the load torque signal (see Section 2.3 and Section 2.5.1).
- Define parameter vector according to the analyzed TP model alternative (i.e., select parameters A, B, C, D, and E). It is based on Table 1.
- Define the parameter space , and its discretization (see Section 2.4).
- Set up system matrix , input and output matrices and () based on Table 1 and on the equations in Section 2.2.
- Run higher-order singular value decomposition using the above mentioned matrix;
- Set up weighting functions and vertex systems according to the approximation bywhere R is the number vertex systems (see Table 1 for the applied linear systems of the different TP model alternatives), and are the linear system matrices in the vertices, and is the weighting function. In this study, only CNO (Close-To-Normality) and IRNO (Inverse-Relaxed-Normality) functions are studied; however, other weighting functions can be selected, such as SNNN (Sum-Normalized and Non Negativeness) [31,32,33,34];
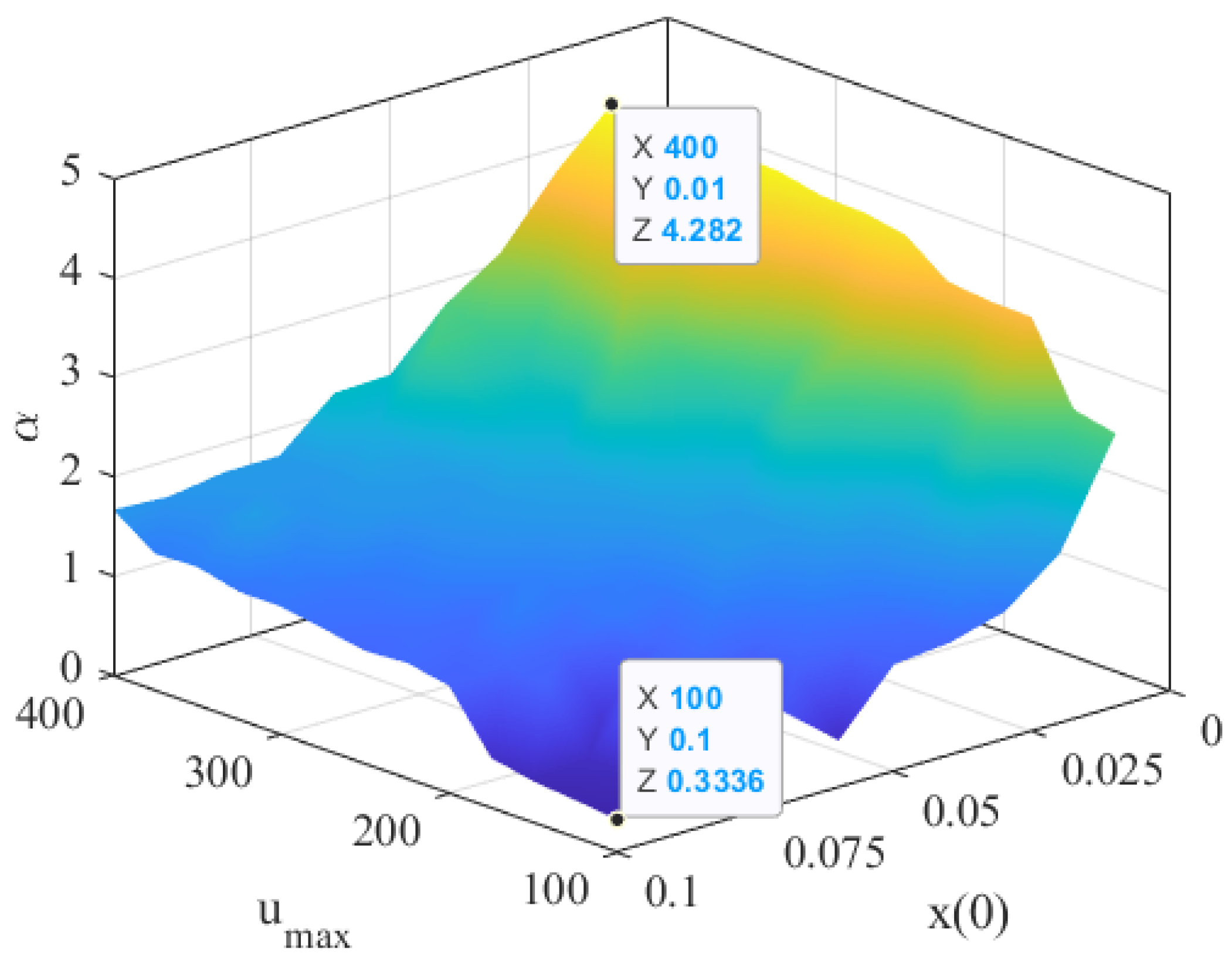
- The control goal is to speed up the system response. In this case, the so-called decay rate control can be applied, i.e., to solve the following generalized eigenvalue minimization problem with linear matrix inequalities [35]:where , and .The control goal is augmented by the control value constraint. Assuming that the state initial value is bounded, i.e., ( is predefined), the constraint can be enforced at all times if the following linear matrix inequalities hold:The maximum value of the parameter can be found by the simple bisection method as follows:
- –
- Set the interval where is assumed;
- –
- While do the following iteration ( is a small positive limit, is used):
- *
- ;
- *
- Solve the above mentioned LMI with ;
- *
- If LMI is feasible, then ; otherwise, .
- –
- .
- Check the closed-loop control system. Feasibility and applicability checks are performed, and the results are shown in the next section.
3. Results
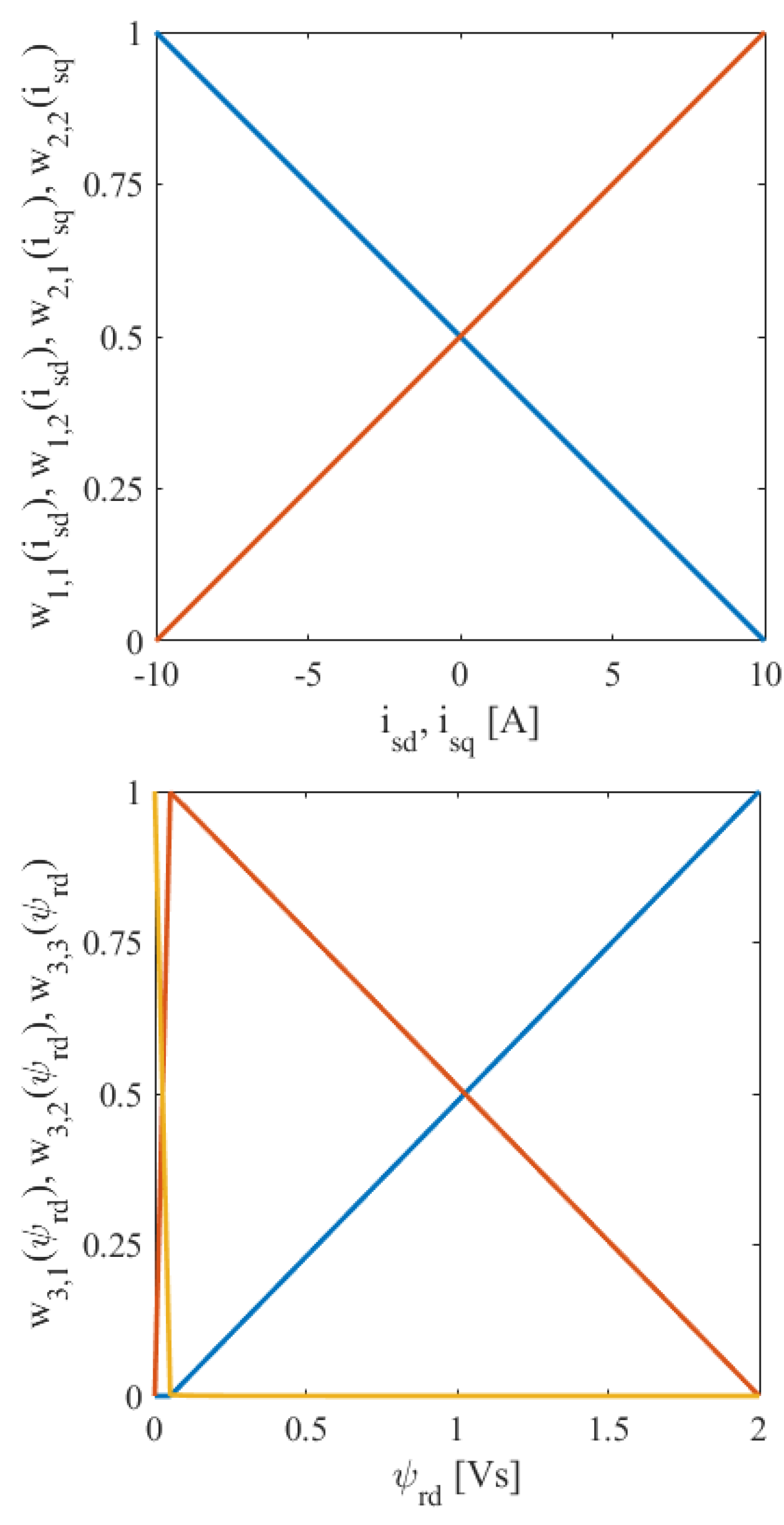
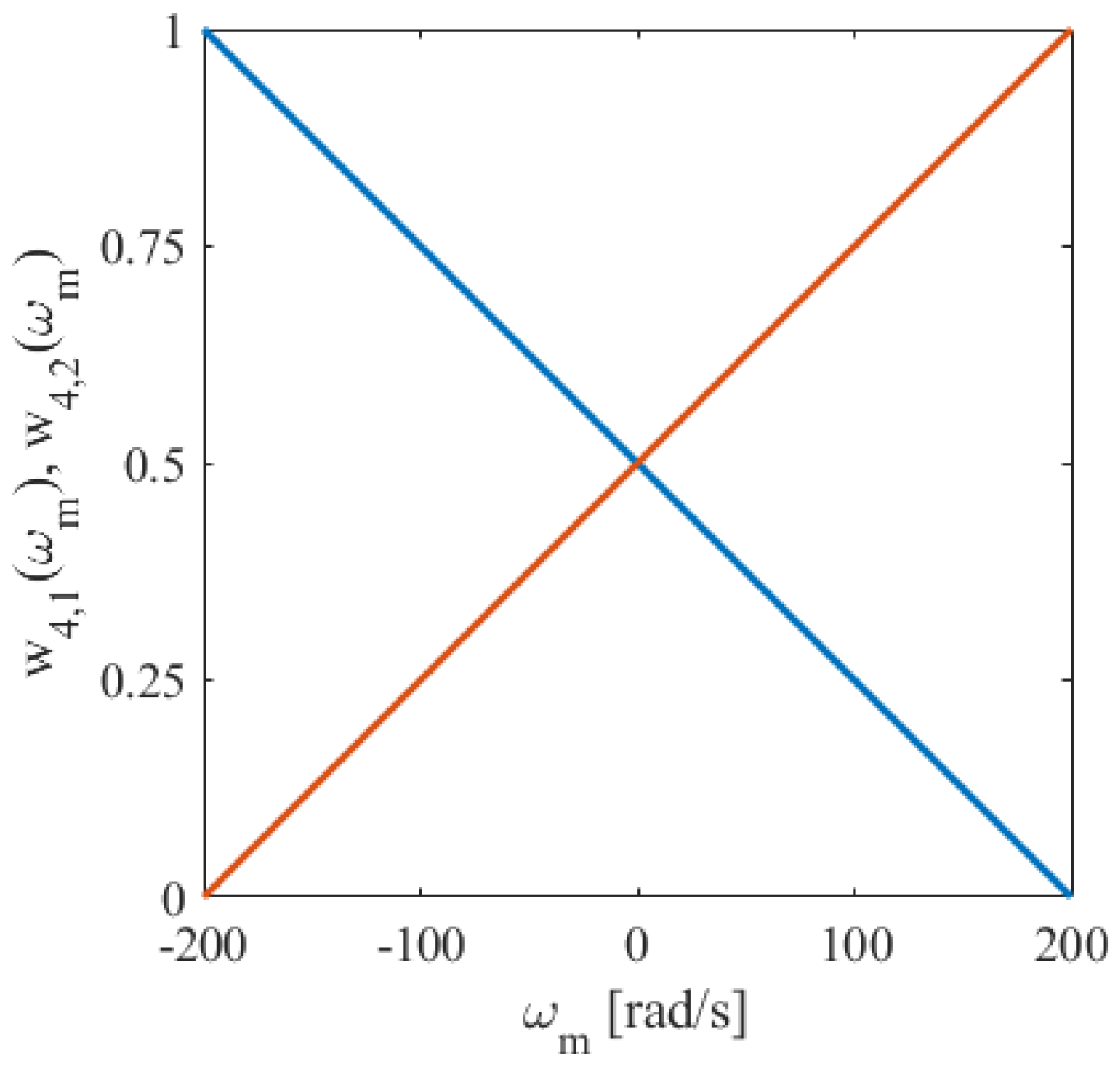
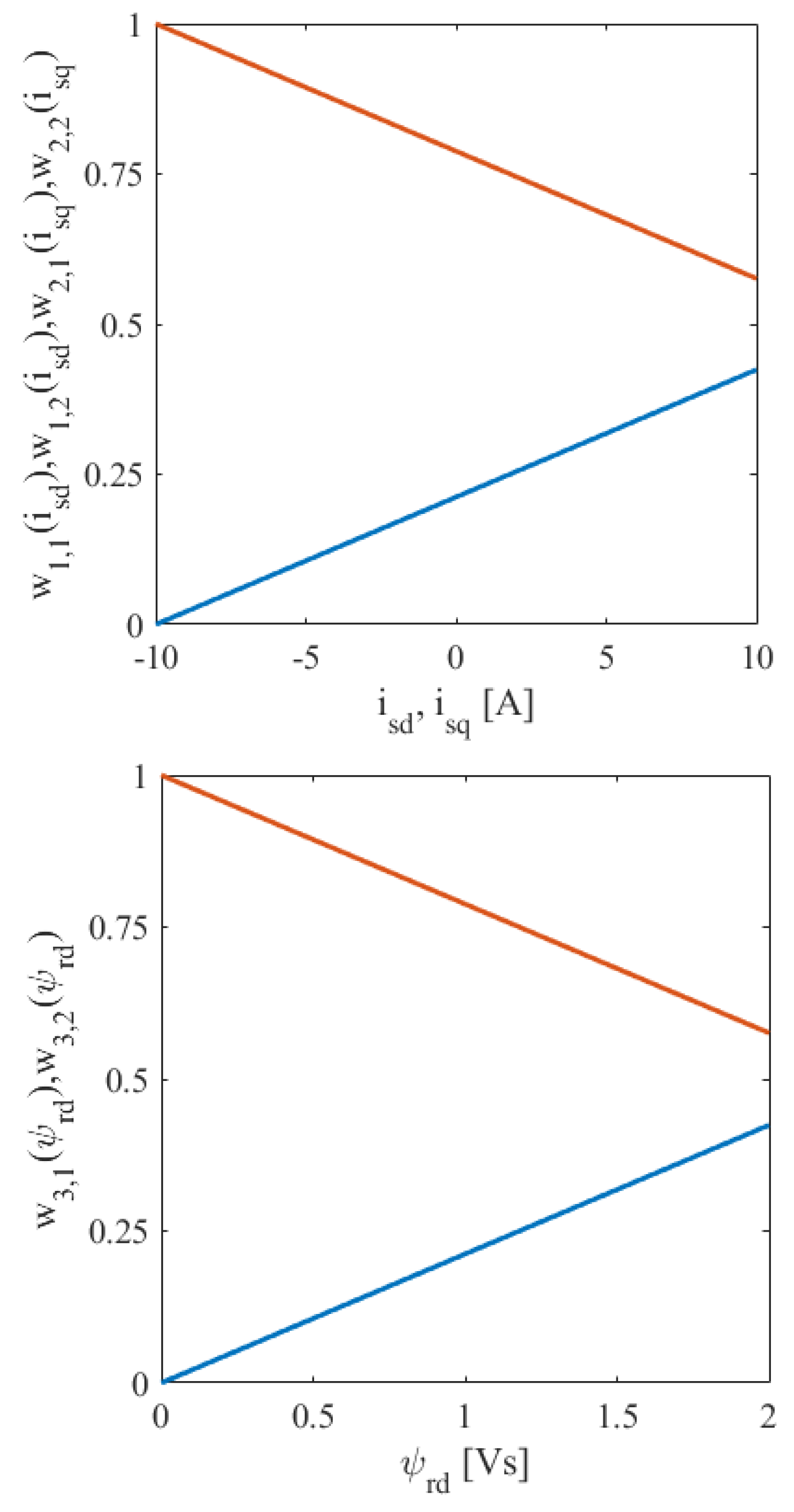
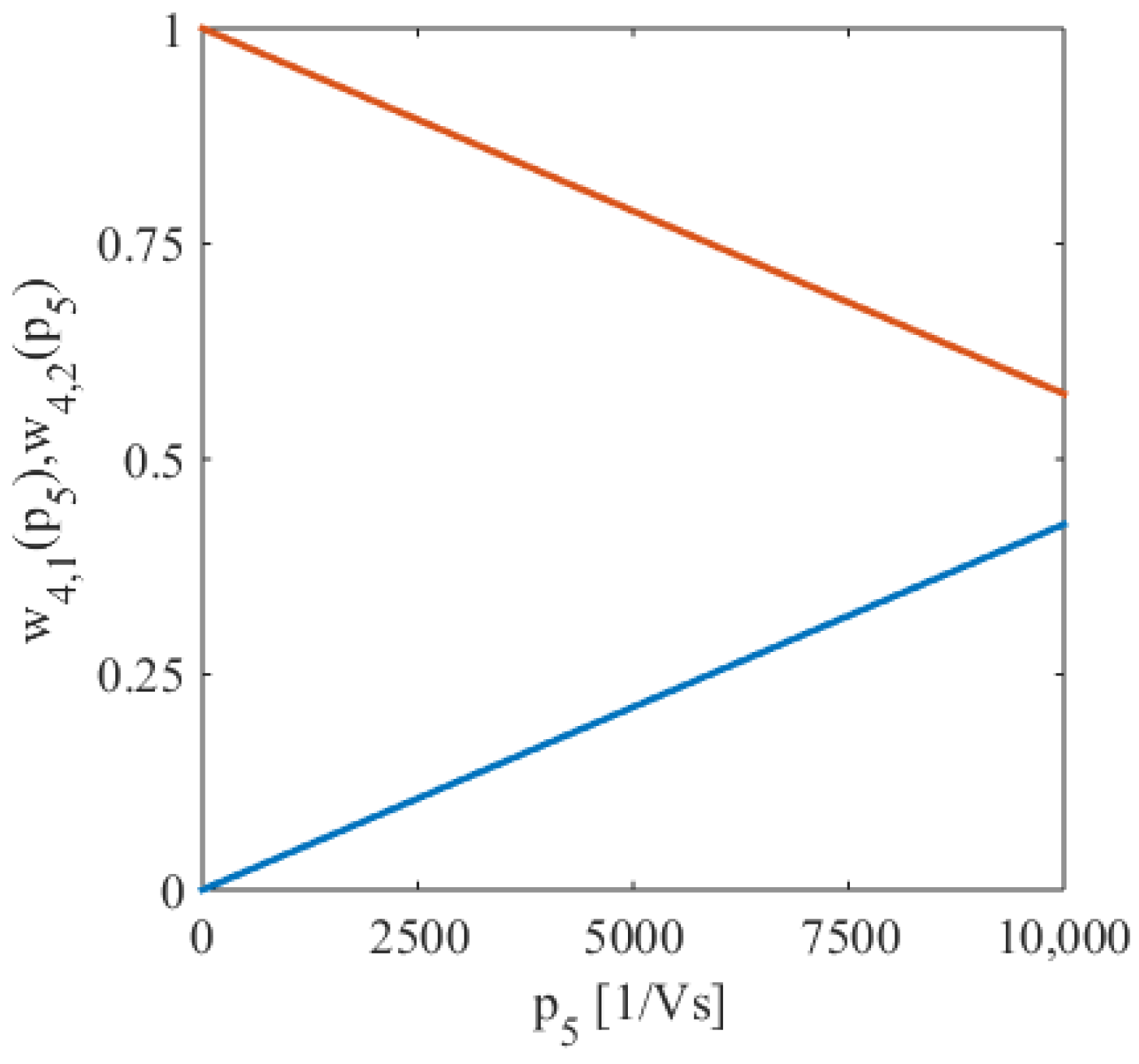
3.1. The Weighting Functions
3.2. Results with the Output Matrix
3.3. Results with the Output Matrix
3.4. Results with the Output Matrix
3.5. Results with the Output Matrix
3.6. Changing of the Weighting Functions
3.7. The Control Matrix
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Orłowska-Kowalska, T.; Dybkowski, M. Industrial drive systems. Current state and development trends. Power Electron. Drives 2016, 1, 5–25. [Google Scholar] [CrossRef]
- Boldea, I.; Tutelea, L.N.; Parsa, L.; Dorrell, D. Automotive electric propulsion systems with reduced or no permanent magnets: An overview. IEEE Trans. Ind. Electron. 2014, 61, 5696–5711. [Google Scholar] [CrossRef]
- Aktas, M.; Awaili, K.; Ehsani, M.; Arisoy, A. Direct torque control versus indirect field-oriented control of induction motors for electric vehicle applications. Eng. Sci. Technol. Int. J. 2020, 23, 1134–1143. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Lee, C.H.T.; Song, Z. A critical review of advanced electric machines and control strategies for electric vehicles. Proc. IEEE 2021, 109, 1004–1028. [Google Scholar] [CrossRef]
- Trzynadlowski, A. The Field Orientation Principle in Control of Induction Motors; Springer: New York, NY, USA, 1993. [Google Scholar] [CrossRef]
- Boldea, I.; Moldovan, A.; Tutelea, L. Scalar V/f and I-f control of AC motor drives: An overview. In Proceedings of the 2015 International Aegean Conference on Electrical Machines & Power Electronics (ACEMP), 2015 International Conference on Optimization of Electrical & Electronic Equipment (OPTIM) & 2015 International Symposium on Advanced Electromechanical Motion Systems (ELECTROMOTION), Side, Turkey, 2–4 September 2015; pp. 8–17. [Google Scholar] [CrossRef]
- Blaschke, F. The principle of field-orientation as applied to the transvector closed-loop control system for rotating-field machines. Siemens Rev. 1972, 34, 217–220. [Google Scholar]
- Hasse, K. Drehzahlgelverfahren für schnelle umkehrantriebe mit stromrichtergespeisten asynchron-kurzschlusslaufer-motoren. Regelungstechnik 1972, 20, 60–62. [Google Scholar]
- Xu, X.; De Doncker, R.; Novotny, D. A stator flux oriented induction machine drive. In Proceedings of the 19th Annual IEEE Power Electronics Specialists Conference (PESC), Kyoto, Japan, 11–14 April 1988; pp. 870–876. [Google Scholar] [CrossRef]
- De Doncker, R.; Novotny, D. The universal field oriented controller. IEEE Trans. Ind. Appl. 1994, 30, 92–100. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kennel, R.M.; Espinoza, J.R.; Trincado, M.; Silva, C.A.; Rojas, C.A. High-performance control strategies for electrical drives: An experimental assessment. IEEE Trans. Ind. Electron. 2012, 59, 812–820. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Z.; Mei, X.; Rodríguez, J.; Kennel, R. Advanced control strategies of induction machine: Field oriented control, direct torque control and model predictive control. Energies 2018, 11, 120. [Google Scholar] [CrossRef]
- Aziz, A.G.M.A.; Abdelaziz, A.Y.; Ali, Z.M.; Diab, A.A.Z. A comprehensive examination of vector-controlled induction motor drive techniques. Energies 2023, 16, 2854. [Google Scholar] [CrossRef]
- Takahashi, I.; Noguchi, T. A new quick-response and high-efficiency control strategy of an induction motor. IEEE Trans. Ind. Appl. 1986, IA-22, 820–827. [Google Scholar] [CrossRef]
- Depenbrock, M. Direct self-control (DSC) of inverter-fed induction machine. IEEE Trans. Power Electron. 1988, 3, 420–429. [Google Scholar] [CrossRef]
- Lascu, C.; Boldea, I.; Blaabjerg, F. Direct torque control of sensorless induction motor drives: A sliding-mode approach. IEEE Trans. Ind. Appl. 2004, 40, 582–590. [Google Scholar] [CrossRef]
- Orlowska-Kowalska, T.; Dybkowski, M. Stator-current-based MRAS estimator for a wide range speed-sensorless induction-motor drive. IEEE Trans. Ind. Electron. 2010, 57, 1296–1308. [Google Scholar] [CrossRef]
- Orlowska-Kowalska, T.; Korzonek, M.; Tarchala, G. Stability improvement methods of the adaptive full-order observer for sensorless induction motor drive—Comparative study. IEEE Trans. Ind. Inform. 2019, 15, 6114–6126. [Google Scholar] [CrossRef]
- Yildiz, R.; Barut, M.; Zerdali, E. A comprehensive comparison of extended and unscented Kalman filters for speed-sensorless control applications of induction motors. IEEE Trans. Ind. Inform. 2020, 16, 6423–6432. [Google Scholar] [CrossRef]
- Degner, M.; Lorenz, R. Using multiple saliencies for the estimation of flux, position, and velocity in AC machines. IEEE Trans. Ind. Appl. 1998, 34, 1097–1104. [Google Scholar] [CrossRef]
- Ha, J.I.; Sul, S.K. Sensorless field-orientation control of an induction machine by high-frequency signal injection. IEEE Trans. Ind. Appl. 1999, 35, 45–51. [Google Scholar] [CrossRef]
- Yoon, Y.D.; Sul, S.K. Sensorless control for induction machines based on square-wave voltage injection. IEEE Trans. Power Electron. 2014, 29, 3637–3645. [Google Scholar] [CrossRef]
- Casadei, D.; Profumo, F.; Serra, G.; Tani, A. FOC and DTC: Two viable schemes for induction motors torque control. IEEE Trans. Power Electron. 2002, 17, 779–787. [Google Scholar] [CrossRef]
- Buja, G.; Kazmierkowski, M. Direct torque control of PWM inverter-fed AC motors—A survey. IEEE Trans. Ind. Electron. 2004, 51, 744–757. [Google Scholar] [CrossRef]
- Kumar, R.H.; Iqbal, A.; Lenin, N.C. Review of recent advancements of direct torque control in induction motor drives—A decade of progress. IET Power Electron. 2018, 11, 1–15. [Google Scholar] [CrossRef]
- Marino, R.; Peresada, S.; Valigi, P. Adaptive input-output linearizing control of induction motors. IEEE Trans. Autom. Control 1993, 38, 208–221. [Google Scholar] [CrossRef]
- Chiasson, J. Dynamic feedback linearization of the induction motor. IEEE Trans. Autom. Control 1993, 38, 1588–1594. [Google Scholar] [CrossRef]
- Kuczmann, M.; Horváth, K. Design of feedback linearization controllers for induction motor drives by using stator reference frame models. In Proceedings of the 2021 IEEE 19th International Power Electronics and Motion Control Conference (PEMC), Gliwice, Poland, 25–29 April 2021; pp. 766–773. [Google Scholar] [CrossRef]
- Chiasson, J. A new approach to dynamic feedback linearization control of an induction motor. IEEE Trans. Autom. Control 1998, 43, 391–397. [Google Scholar] [CrossRef]
- Kuczmann, M. Feedback linearization based induction machine control. In Proceedings of the 2020 2nd IEEE International Conference on Gridding and Polytope Based Modelling and Control (GPMC), Győr, Hungary, 21–22 November 2020; pp. 9–12. [Google Scholar] [CrossRef]
- Baranyi, P. TP model transformation as a way to LMI-based controller design. IEEE Trans. Ind. Electron. 2004, 51, 387–400. [Google Scholar] [CrossRef]
- Baranyi, P. The generalized TP model transformation for T-S fuzzy model manipulation and generalized stability verification. IEEE Trans. Fuzzy Syst. 2014, 22, 934–948. [Google Scholar] [CrossRef]
- Baranyi, P. Extracting LPV and qLPV structures from state-space functions: A TP model transformation based framework. IEEE Trans. Fuzzy Syst. 2020, 28, 499–509. [Google Scholar] [CrossRef]
- Baranyi, P. How to vary the input space of a T-S fuzzy model: A TP model transformation-based approach. IEEE Trans. Fuzzy Syst. 2022, 30, 345–356. [Google Scholar] [CrossRef]
- Tanaka, K.; Wang, H.O. Fuzzy Control Design and Analysis, A Linear Matrix Inequality Approach; John Wiley and Sons, Inc.: New York, NY, USA, 2001. [Google Scholar]
- Moez, A.; Mansour, S.; Mohamed, C.; Driss, M. Takagi-Sugeno fuzzy control of induction motor. Int. J. Electr. Electron. Eng. 2009, 2, 25–31. [Google Scholar]
- Allouche, M.; Chaabane, M.; Souissi, M.; Mehdi, D.; Tadeo, F. State feedback tracking control for indirect field-oriented induction motor using fuzzy approach. Int. J. Autom. Comput. 2013, 10, 99–110. [Google Scholar] [CrossRef]
- Zina, H.B.; Allouche, M.; Chaabane, M. Tracking control for induction motor using Takagi-Sugeno approach. In Proceedings of the 14th International Conference on Sciences and Techniques of Automatic Control & Computer Engineering, Sousse, Tunisia, 20–22 December 2013; pp. 25–30. [Google Scholar] [CrossRef]
- Iles, S.; Matusko, J.; Kolonić, F. Tensor product transformation based speed control of permanent magnet synchronous motor drives. In Proceedings of the 17th International Conference on Electrical Drives and Power Electronics, The High Tatras, Slovakia, 25–27 September 2011; pp. 323–328. [Google Scholar]
- Cai, S.; Zhao, G. Tensor product model transformation-based controller for induction motor using sum of square method. In Proceedings of the 41st Chinese Control Conference, Hefei, China, 25–27 July 2022; pp. 2473–2477. [Google Scholar] [CrossRef]
- Németh, Z.; Kuczmann, M. Tensor product transformation-based modeling of an induction machine. Asian J. Control 2021, 23, 1280–1289. [Google Scholar] [CrossRef]
- Németh, Z.; Kuczmann, M. Linear-matrix-inequality-based controller and observer design for induction machine. Electronics 2022, 11, 3894. [Google Scholar] [CrossRef]
- Kuczmann, M. Study of tensor product model alternatives. Asian J. Control 2021, 23, 1249–1261. [Google Scholar] [CrossRef]
- Khalil, K.H. Nonlinear Systems; Pearson: Harlow, UK, 2014. [Google Scholar]
- Gabriel, R.; Leonhard, W.; Nordby, C.J. Field-oriented control of a standard AC motor using microprocessors. IEEE Trans. Ind. Appl. 1980, IA-16, 186–192. [Google Scholar] [CrossRef]
- Sathikumar, S.; Vithayathil, J. Digital simulation of field-oriented control of induction motor. IEEE Trans. Ind. Electron. 1984, -IE-31, 141–148. [Google Scholar] [CrossRef]
- Lorenz, R.; Lawson, D. Flux and torque decoupling control for field-weakened operation of field-oriented induction machines. IEEE Trans. Ind. Appl. 1990, 26, 290–295. [Google Scholar] [CrossRef]
- Leonhard, W. Control of Electrical Drives; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar] [CrossRef]
- Horváth, K.; Kuslits, M.; Lovas, S. Model-based control algorithm development of induction machines by using a well-defined model architecture and rapid control prototyping. Electr. Eng. 2020, 102, 1103–1116. [Google Scholar] [CrossRef]
- Astrom, K.J.; Murray, R.M. Feedback Systems; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | E | D | C | B | A | R | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 | x a | x | x | - | x | 16 |
| 1 | 0 | 0 | 0 | 0 | 1 | x | x | x | x | x | 32 |
| 2 | 0 | 0 | 0 | 1 | 0 | x | x | x | x | x | 32 |
| 3 | 0 | 0 | 0 | 1 | 1 | x | x | x | x | x | 32 |
| 4 | 0 | 0 | 1 | 0 | 0 | x | x | x | - | x | 16 |
| 5 | 0 | 0 | 1 | 0 | 1 | x | x | x | x | x | 32 |
| 6 | 0 | 0 | 1 | 1 | 0 | - | x | x | x | x | 16 |
| 7 | 0 | 0 | 1 | 1 | 1 | - | x | x | x | x | 16 |
| 8 | 0 | 1 | 0 | 0 | 0 | x | x | - | x | x | 16 |
| 9 | 0 | 1 | 0 | 0 | 1 | x | x | - | x | x | 16 |
| 10 | 0 | 1 | 0 | 1 | 0 | x | x | - | x | x | 16 |
| 11 | 0 | 1 | 0 | 1 | 1 | x | x | - | x | x | 16 |
| 12 | 0 | 1 | 1 | 0 | 0 | x | x | - | x | x | 16 |
| 13 | 0 | 1 | 1 | 0 | 1 | x | x | - | x | x | 16 |
| 14 | 0 | 1 | 1 | 1 | 0 | - | x | - | x | x | 8 |
| 15 | 0 | 1 | 1 | 1 | 1 | - | x | - | x | x | 8 |
| 16 | 1 | 0 | 0 | 0 | 0 | x | x | x | - | x | 16 |
| 17 | 1 | 0 | 0 | 0 | 1 | x | - | x | x | x | 16 |
| 18 | 1 | 0 | 0 | 1 | 0 | x | x | x | x | x | 32 |
| 19 | 1 | 0 | 0 | 1 | 1 | x | - | x | x | x | 16 |
| 20 | 1 | 0 | 1 | 0 | 0 | x | x | x | - | x | 16 |
| 21 | 1 | 0 | 1 | 0 | 1 | x | x | x | x | x | 32 |
| 22 | 1 | 0 | 1 | 1 | 0 | - | x | x | x | x | 16 |
| 23 | 1 | 0 | 1 | 1 | 1 | - | x | x | x | x | 16 |
| 24 | 1 | 1 | 0 | 0 | 0 | x | x | x | x | x | 32 |
| 25 | 1 | 1 | 0 | 0 | 1 | x | - | x | x | x | 16 |
| 26 | 1 | 1 | 0 | 1 | 0 | x | x | x | x | x | 32 |
| 27 | 1 | 1 | 0 | 1 | 1 | x | - | x | x | x | 16 |
| 28 | 1 | 1 | 1 | 0 | 0 | x | x | x | x | x | 32 |
| 29 | 1 | 1 | 1 | 0 | 1 | x | x | x | x | x | 32 |
| 30 | 1 | 1 | 1 | 1 | 0 | - | x | x | x | x | 16 |
| 31 | 1 | 1 | 1 | 1 | 1 | - | x | x | x | x | 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuczmann, M.; Horváth, K. Tensor Product Alternatives for Nonlinear Field-Oriented Control of Induction Machines. Electronics 2024, 13, 1405. https://doi.org/10.3390/electronics13071405
Kuczmann M, Horváth K. Tensor Product Alternatives for Nonlinear Field-Oriented Control of Induction Machines. Electronics. 2024; 13(7):1405. https://doi.org/10.3390/electronics13071405
Chicago/Turabian StyleKuczmann, Miklós, and Krisztián Horváth. 2024. "Tensor Product Alternatives for Nonlinear Field-Oriented Control of Induction Machines" Electronics 13, no. 7: 1405. https://doi.org/10.3390/electronics13071405
APA StyleKuczmann, M., & Horváth, K. (2024). Tensor Product Alternatives for Nonlinear Field-Oriented Control of Induction Machines. Electronics, 13(7), 1405. https://doi.org/10.3390/electronics13071405