Abstract
Hybrid electric vehicles (HEVs) have certain advantages over internal combustion engines in terms of energy consumption and emission performance. However, the transmission system parameters are uncertain. The low matching between the engine and the power transmission system makes it a big problem to improve the efficiency of hybrid vehicles. Therefore, the multi-objective optimization design of hybrid vehicles is studied. The transmission system parameters of hybrid vehicles are analyzed from the objective function, decision variables, and constraints. The NSGA-II algorithm with elite strategy is introduced to realize the optimal selection of parameters and formulation of energy consumption optimization strategy. The results showed that the multi-objective optimization algorithm could adjust the position of the working point of the engine and improve the efficiency by more than 10%. There was an average difference of 2.15% after the improvement in the fuel consumption of four-gear vehicles. The fuel consumption per 100 km decreases by more than 3%. The maximum climbing gradient of the whole vehicle was 33.9%. The power factor of the direct gear of the maximum power factor increases by 15% after the improvement. The multi-objective energy consumption optimization design of hybrid vehicles proposed in the study can effectively improve the economic and dynamic performance of the whole vehicle and reduce fuel consumption. It provides a reference for the optimization of the hybrid vehicle transmission system.
1. Introduction
Hybrid electric vehicles (HEVs) have a large advantage in energy emission performance compared to internal combustion engines, and their continued voyage is better than that of pure electric vehicles, which can effectively improve transport efficiency. The main part parameters of a hybrid car include the engine, driving motor, transmission as well as main deceleration, and the performance difference of its car’s power, as well as fuel economy, which largely depends on the rationality of the power transfer system [1]. The main purpose of HEVs is to continuously reduce the emission of cars, so it has a high economic requirement for fuel. In parallel and hybrid HEVs, when the energy of the batteries is insufficient, the batteries will be involved in the conversion problems of their energy efficiency, and then the phenomenon of increased oil consumption of the cars occurs. The diversity of the design of the composition structure of the power system (as well as the state of vehicle driving, individual driver differences, and so on) can cause different degrees of impact on the transformation of the efficiency of HEVs. The current research focus on the energy consumption issues for hybrid cars is mainly on their energy management, i.e., finding the most suitable car operation mode to improve their energy consumption issues. The improvement of engine efficiency can effectively achieve its goal of fuel economy, and improving the efficiency of automotive batteries can, to some extent, ensure a reduction in energy consumption. The adaptive concept is often applied in the battery condition assessment, which can effectively ensure that the state of charge (SOC) can reach the maximum level and, thereby, reduce energy consumption. At the same time, in the process of vehicle planning, its supply chain problem is mostly transformed into a double objective linear programming problem, and the setting of the relevant economic objective functions and conditional parameters is reasonable to achieve the cost minimization of the planned route. The non-dominated genetic algorithm can effectively set constraints and reduce the problem of size constraints in the process of the car’s energy consumption. On the basis of guaranteeing the dynamic performance of vehicles, reducing fuel consumption, elevating the operation efficiency of the vehicles, and improving them, are the most important contents of this current research. The high range of parameter conditions and engineering constraints, as well as the high number of influencing factors, should strengthen the objective optimization of hybrid parameters and the parameter objective design for their performance development needs. The energy consumption parameters of hybrid electric vehicles are highly nonlinear and discontinuous and gradient-based optimization algorithms are often difficult to produce good application results when performing problem-solving [2,3]. The NSGA-II algorithm, as a global optimization search algorithm, has a better global search ability, problem-solving ability, and performs parallel processing. The NSGA-II algorithm can effectively determine the evaluation indicators and objective functions for the requirements of the power and fuel economy in the analysis of automobile energy consumption, taking into account factors such as vehicle mass, transmission system quality, and transmission system efficiency, and achieving the construction of multi-objective optimization models for power transmission systems. Additionally, this algorithm can solve the objective function through mutation operation and optimal solution calculation when optimizing speed and accuracy, so it can achieve the minimization of energy consumption on the basis of grasping the vehicle’s power performance. In this study, based on the performance advantages of the non-dominated sorting genetic algorithm (non-dominated sorting genetic algorithm-II generation, NSGA-II), the multi-objective optimization theory and methods are used to transform the energy optimization problem of hybrid electric vehicles into a multi-objective solution problem with the smallest energy consumption. With the help of other scholars for the analysis of automobile energy consumption problems, and with the help of genetic algorithms which focus on the limitations of the algorithm accuracy effect, the research also analyzes the influencing factors that affect the efficiency of automobile energy consumption and purposefully selects the parameters of the power vehicle driveline for optimal selection, in the hopes of better research on automobile energy consumption and the design of related strategies to improve its power and economy.
2. Related Work
In the research of automobile fuel cell engines, the classical Pontryagin minimum principle (PMP) and Dynamic programming (DP) theory can be used to improve the efficiency of fuel application. The practicability of these two theories has been verified by practice. However, this method needs to know the driving conditions so as to judge the actual driving conditions of the vehicle and, finally, apply them to the actual vehicle. In the study of fuel cell engine systems by Fu J et al., adaptive regulation and PMP could manage the engine energy in layers and estimate the future vehicle power demand according to the Energy Management Strategy (EMS). Compared with the global optimization method, the EMS maximized the capacity of vehicle batteries and improved fuel economy [4]. The optimal power of hybrid electric vehicles can be solved according to the PMP principle. On this basis, Shi et al. introduced a neural network to solve the parameters of power prediction and adopted an adaptive adjustment method to calculate the SOC of the battery. The simulation results showed that the hybrid improved method could evaluate the vehicle speed and had good power prediction ability. While ensuring the economic cost of the vehicle, it also ensured the sustainability of battery charging [5]. In the study of the battery life of electric vehicles, the way to increase vehicle mileage includes the improvement of energy efficiency. Zhang Q. G. found that the multi-island genetic algorithm (GA) could optimize the parameters of the control strategy in the hybrid electric vehicle, thus improving the accuracy of the model control strategy. The results showed that this method could improve the effective utilization rate of automobile energy. In the energy consumption optimization of hybrid vehicles, it was necessary to focus on the oil pump components in the power system. The efficiency of the oil pump had a significant impact on the efficiency of the hybrid vehicle [6]. Huang M. and other researchers used the NSGA-II algorithm to adjust the proportion of the oil pump rotor to achieve the adjustment of the oil supply system, thus improving its functional accuracy. The prototype test results showed that the proportion designed by this method is reasonable [7].
The energy consumption solution of hybrid vehicles can be considered as the solution to multi-objective optimization problems, mainly including mathematical programming and heuristic intelligent algorithm [8]. The mathematical programming method requires the variables to meet the requirements of continuous differentiability, which leads to the poor universality of the method. Heuristic intelligent algorithms include the genetic algorithm, ant colony algorithm, particle swarm algorithm, etc. These methods have a strong global search ability. It has wide applicability in solving high-latitude nonlinear problems [9]. S. Kumar et al. used fuzzy mathematics to establish the model and then adopted a genetic algorithm to optimize the parameters of the mathematical model. In the evaluation and prediction of the relationship between parameters and targets, the predicted value of the model was slightly different from the experimental value, indicating that the newly established model had a good prediction performance [10]. The combination of different heuristic algorithms also has advantages in solving multi-objective optimization problems. Xue B. applied the ant colony algorithm and the GA to wireless power transmission. For the multi-objective optimization of energy transmission and information transmission, this method could optimize both objectives at the same time and had a high efficiency and information transmission capacity [11]. The vehicle battery system has a strong correlation with EMS. To prolong the life of the vehicle battery system, on the basis of the GA and other methods, Liang J. and others used the PMP principle to optimize the function and constructed the cost function as the objective optimization function. PMP had good performance after optimization and could be used to evaluate the durability and economic cost of the battery [12]. Dutta J. solved the multi-objective vehicle planning problem with the help of the cluster main path and fully considered the operating costs and fuel consumption to reduce the vehicle’s pollution emissions. The cluster concept and multi-objective model were used to realize the selection of the best planning route and linked customers to the planning route [13]. The decision information is judged and selected optimally with the help of the strength Pareto evolutionary algorithm and the non-dominated genetic algorithm (NSGA). Yuen T. J. used evolutionary algorithms to achieve multi-objective optimization and adopted constraints to standardize the powertrain design. The non-dominated sequencing genetic algorithm and differential constraint algorithm were used to analyze the motor transmission ratio, motor torque, and wheel pressure ratio. The results showed that this method could complete the convergence in a short time and greatly reduce the energy consumption of vehicles [14]. Jin L. et al. proposed an improved NSGA-II algorithm to analyze the search problem of motor multi-objective parameters. A redundant mutation operator was used to improve the recognition performance of non-dominant individuals. The rotor clearance, rotor tooth width, and other parameters affecting the motor performance were optimized. The optimization model based on the maximum output shaft torque was established. The experimental results showed that the optimized parameters could shorten the 100-km acceleration time in the background experimental simulation environment. The battery SOC value had good stability and was suitable for the design of the motor system. Electric vehicles had a relatively wide application space due to the advantages of distributed energy storage [15]. Wei H. proposed to maximize the diversity of the NSGA-II to achieve the relationship between the charge distribution, the charging cost, and the goal optimization and to dynamically adjust the time. The results showed that this method could improve the durability and practicability of electric vehicles, reduce the over-dependence on data, and have high applicability [16]. Dao D. N. proposed an evolutionary algorithm based on the strength Pareto and multi-objective optimization parameters, which was an innovative combination of the NSGA-III algorithm and SPEA/R algorithm. The benchmark function was the test tool and the suspension system was the simulation environment. The results showed that the algorithm had good applicability and potential in parameter optimization [17].
In summary, enhancing the research on energy management strategies for fuel cell engines can effectively achieve the estimation of power demand. Many scholars use neural network algorithms, genetic algorithms, and multi-objective algorithms to study the issue of energy consumption. In addition, the NSGA-II algorithm has received more attention due to its advantages in solving the multi-objective parameter problem, but most of the problems focus on solving the parameters and battery cost, and less consideration is given to the factors affecting the automobile’s power. As for how to carry out the analysis of automobile energy consumption problems, D. Shi et.al., in the literature [7], solve the power prediction, Zhang Q. Y. et.al., in the literature [8], carry out the control strategy of hybrid cars with the help of the multi-Island GA parameter optimization and Huang M et.al., in the literature [9] scale the rotor of the oil pumps with the help of NSGA-II algorithm. The research content of the literature is to analyze the impact on the energy consumption and operation efficiency of hybrid cars, different from that, the research translates the energy consumption problems of the cars into multi-objective solution problems and performs efficiency optimal problem-solving from the impact factor evaluation, the control of the power index, and so on, instead of analyzing them only from a single dimension. In the analysis of the objective problem of energy optimization for hybrid electric vehicles, Liang J et al., in Reference [13], use the principle of PMP for the optimization of the cost objective function and construct the cost function as the objective optimization function. In the literature [15] Yuen T. J. et.al. combine the Pareto algorithm with the NSGA algorithm to realize the judgment of decision information, Jin L et.al. then implement the improvement of the NSGA-II algorithm with the operation of redundant mutation operators and realize the improvement of the motor multi-objective parameters search efficiency. In the literature [16], Wei H et.al. performed a charge cost analysis with the NSGA-II algorithm for better dynamic regulation. Most scholars conduct automobile problem analysis with the help of the NSGA-II algorithm, indicating its better application efficacy. Different from other scholars in the NSGA-II algorithm, to improve the research of the concept of the energy impression unit of hybrid cars to conduct the problem, the factor analysis from the nature of its problem, to some extent, reduces the computational effort but also reduces the experimental error caused by the uniformity of the parameter environment. Therefore, combined with the above analysis, the research is based on the advantages of the NSGA-II algorithm to construct the objective problem based on the parameter indicators that affect the power and economy of hybrid electric vehicles, to control the constraints of the parameter conditions, to establish the constraints that meet the practical needs, to use the economy, and power as the criterion goals for the optimal value solution of the problem to achieve its energy consumption optimization effect.
3. Hybrid Vehicle Energy Consumption Optimization Strategy Based on NSGA-II Genetic Algorithm
3.1. Multi-Objective Design Optimization of Hybrid Electric Vehicle Transmission System
The power performance and fuel economy of hybrid vehicles have an important role and internal relationship with the reasonable matching of the optimal transmission. However, the conventional power transmission system is mostly matched with a large number of experimental data, which costs a lot of time. The application effect is poor. Therefore, with the help of computer simulation technology, the selection and optimization of the power drive system of hybrid electric vehicles are realized. This operation can avoid excessive dependence on experimental samples and reduce the cost and complexity of repeated experiments, which is highly feasible [18]. The research proposes to solve the optimal decision problem with the multi-objective optimization theory. The optimal solution of multiple objectives is the optimal solution of multiple objectives in the feasible region. It can solve the optimal solution of the involved contradictory and incomparable optimization objects. The general form can be expressed as Formula (1).
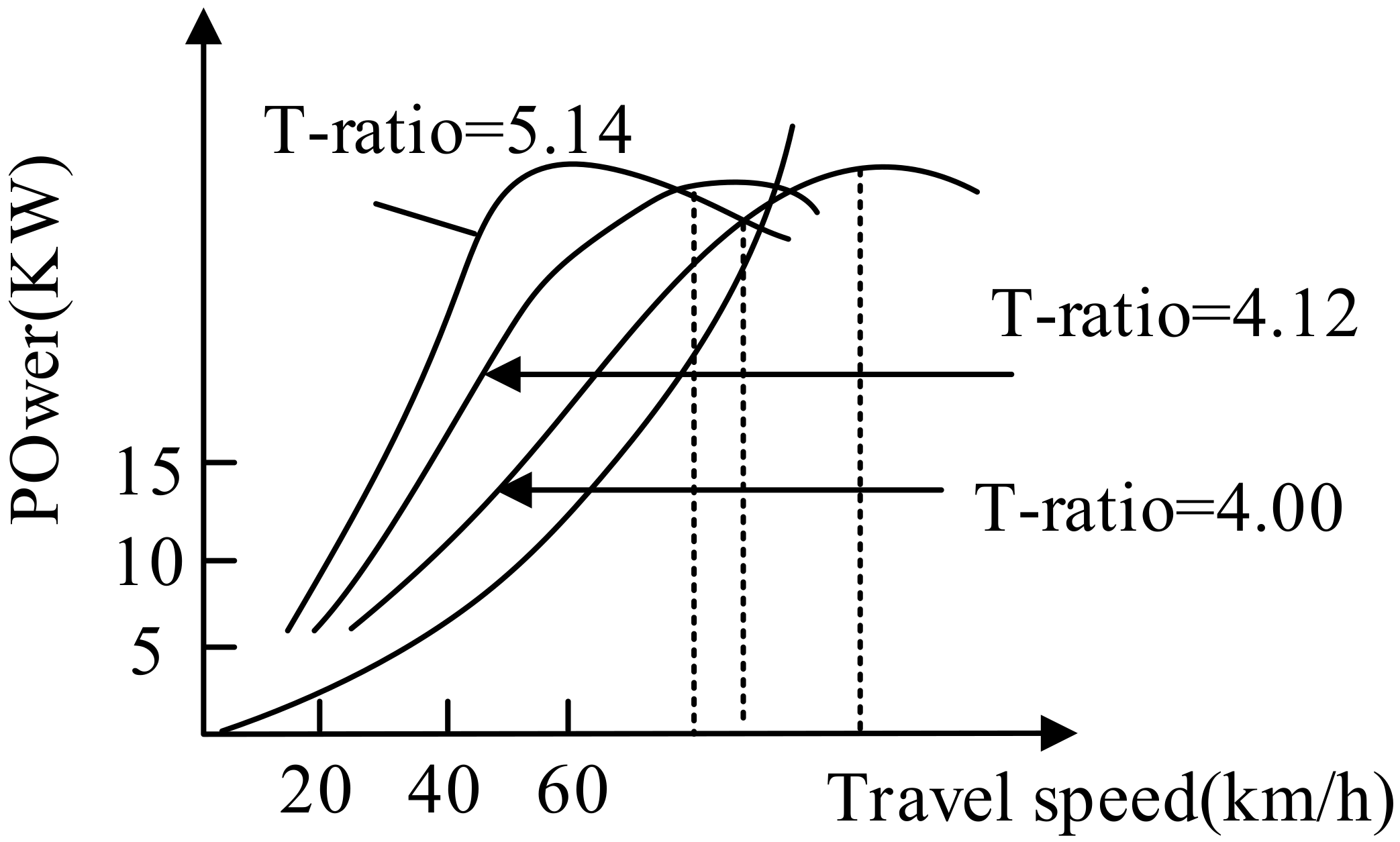
In Formula (1), c represents the target variable. They are all in the corresponding variable space . is the number of target variables. is the decision variable. The decision points are all in the corresponding decision space . represents the number of decision variables, represents random error. Multi-objective optimization includes objective function, decision variables, and constraints. According to the functional relationship among the three, the solution of the optimal result can be effectively achieved. The effectiveness and pertinence of the selection of decision variables will have a great impact on the experimental results. The transmission system parameters of hybrid vehicles include the reduction ratio, the number of transmission gears, and the transmission ratio of each gear. The maximum transmission ratio selected is inversely proportional to the fuel economy of the vehicle, that is, the smaller the maximum transmission ratio is, the better the fuel economy of the vehicle is. The change in the transmission ratio of the main reducer will cause a change in the position of the power balance curve. Although the reduction of the transmission ratio can improve the economy of energy consumption, it will also reduce the power of the vehicle [19]. Figure 1 is the schematic diagram of the influence change of the main reduction ratio.
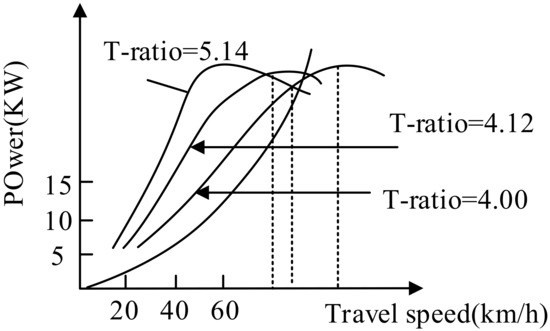
Figure 1.
Schematic diagram of vehicle power change under different main reduction ratios.
An increase in the number of transmission gears will increase the chances of the engine working in low-fuel consumption areas, while also improving the maximum power utilization of the engine, thereby improving both power performance and fuel economy [20]. However, the complexity of the structure makes the maintenance more difficult. Based on the above analysis, it is considered that the rotation ratio is an important indicator that affects the power and economy of the whole vehicle. Therefore, the optimal configuration of the transmission system parameters is studied. The decision variable is defined as Formula (2).
In Formula (2), represents the number of transmission gears. is the gear ratio of the transmission. is the number of gears. represents the turning ratio of the final drive. The dynamic performance indicators of the hybrid vehicles are different due to their focus. However, in terms of ultimate form capacity, it is shown as a grade ability and maximum speed. The ability to achieve high speed in the shortest time is the most important indicator to measure the dynamic characteristics of the vehicle, and also the main concentrated reflection of the dynamic performance of the vehicle.
In Formula (3), represents the transmission rotation ratio. is the rotating arm of the final drive. represents the driving speed of the car. is the wheel radius. The starting acceleration time can be expressed as Formula (4).
In Formula (4), represents the minimum starting speed. are the driving force, rolling resistance and air resistance faced by the vehicle during acceleration. is the starting time. is the conversion factor of the rotational mass of the vehicle, and the value is greater than 1. The mathematical expression is shown in Equation (5).
In Formula (5), represents the moment of inertia of the wheel axle. is the flywheel moment of inertia, is the efficiency of the transmission system. The mass conversion coefficient has a different value range due to the difference between different vehicle types. For example, the coefficient value of a freight car is between 0.04 and 0.05. The conventional car is between 0.03 and 0.05. At the same time, the consumption of the vehicle at constant speed per unit of time is related to factors such as engine power, fuel density, and engine torque. In the case of accelerated driving, the acceleration of the vehicle, the starting speed, and the ending speed should also be considered. There are certain differences in the influencing factors of vehicle fuel economy under different working conditions. It can be expressed as the contents in Table 1. Its content is referenced in reference [21].

Table 1.
Influencing Factors of Vehicle Fuel Economy under Different Working Conditions.
At the same time, when optimizing the transmission system parameters, the power factor of the vehicle itself should be considered. Therefore, the constraint design of the driving force adhesion under the maximum gear is studied. The speed ratio constraints and constraints to prevent power interruptions are also considered. The constraints can be expressed in Table 2. Its content is referenced in Reference [22].
Table 2.
Constraints in Three Cases.
The optimization model of the transmission system parameters of hybrid electric vehicles can include the transmission ratio decision variables under two types, the objective function under the two dimensions of power and economy, and three constraints to achieve the multi-objective optimization of the model.
3.2. Energy Consumption Optimization Control Strategy Based on NSGA-II Genetic Algorithm
A simple genetic algorithm (SGA), as a biological computing model, can realize individual selection by searching and calculating the fitness of spatial individuals. The population is updated by cross-mutation until the algorithm achieves the solution of the optimal individual in the final convergence result. As a basic framework, the SGA can provide basic support for its algorithm improvement. The mathematical definition is shown in Formula (6).
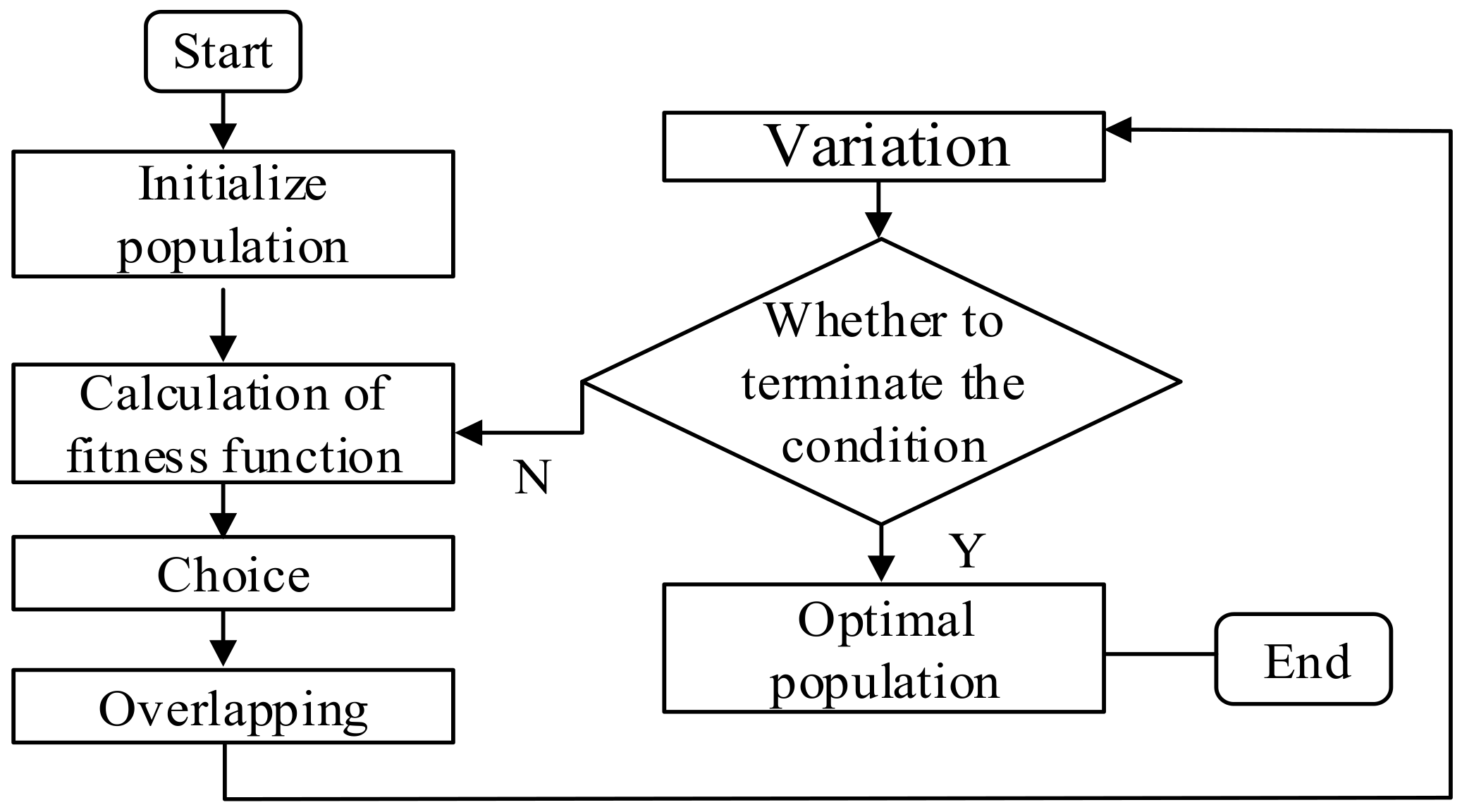
In Formula (6), represents the individual coding method. represents fitness evaluation function. is the initial population. is the population size. is the selection operator. is a cross operator. is a mutation operator. is the termination condition. The algorithm flow is shown in Figure 2.
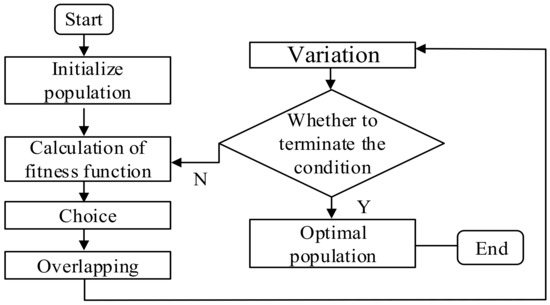
Figure 2.
SGA Algorithm Flow Diagram.
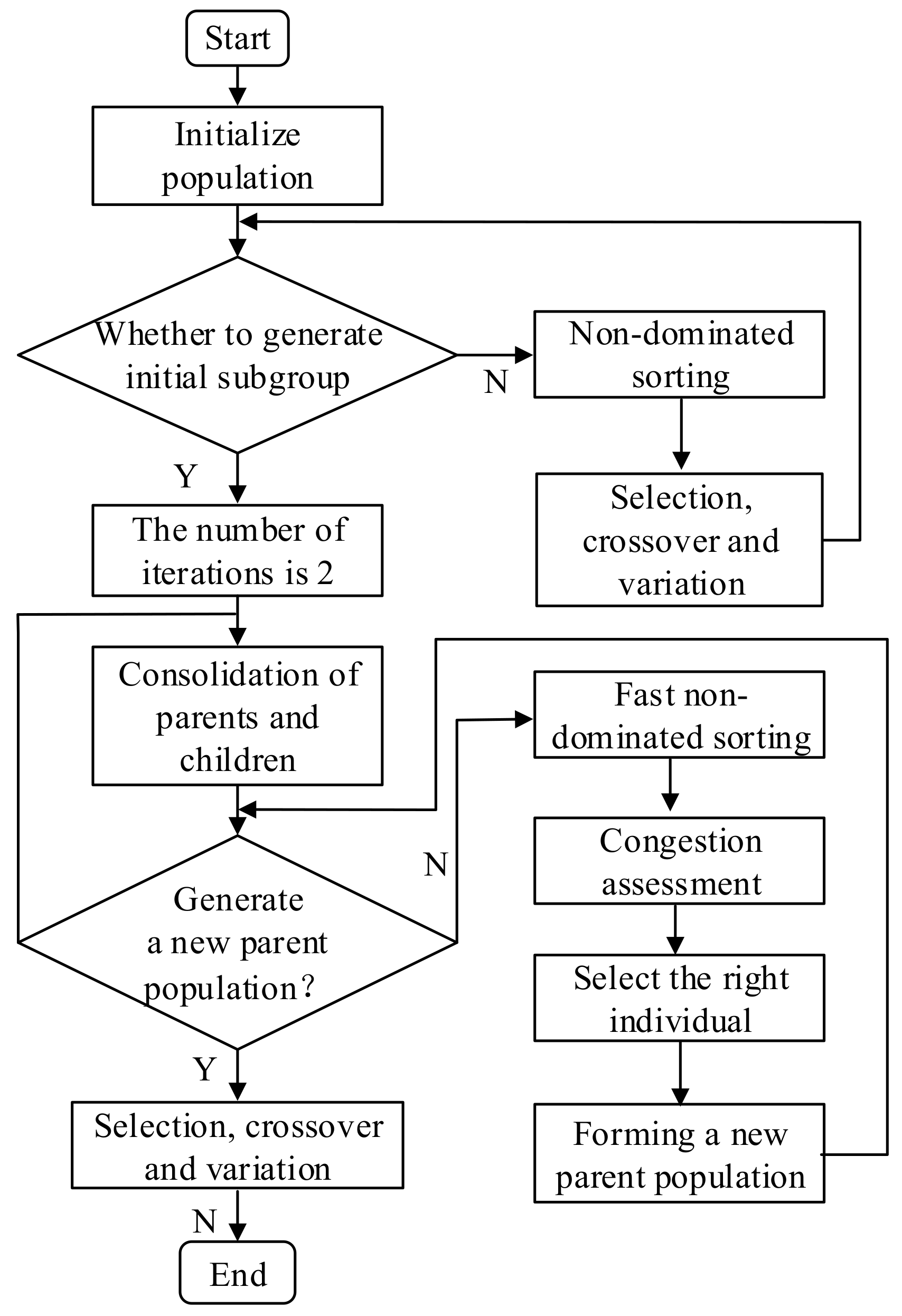
The SGA algorithm encodes the problem space parameters, converts them into binary codes, and then initializes the population. Then, the fitness function, selection operator, and cross-mutation are used for calculation. When the number of evolution iterations reaches the termination condition, or the individual optimal value has been found, the algorithm operation is completed. However, when solving the multi-objective problem, there is an interaction relationship between the sub-objectives. The SGA algorithm is difficult to ensure the balance between the different sub-objectives by finding the optimal solution globally. Therefore, the research selects the non-dominated sorting genetic algorithms (NSGA), which are suitable for a high-dimensional, multi-objective solution to solve the model to obtain the Pareto optimal solution. The NSGA-II algorithm, with an elite strategy, can effectively reduce the complexity of computation compared to the NSGA algorithm. It has good performance in low-dimensional optimization problems. The solution set has good distribution, high operation efficiency, and good application in the optimization of two-objective problems. Figure 3 shows the flow diagram of the NSGA-II algorithm.
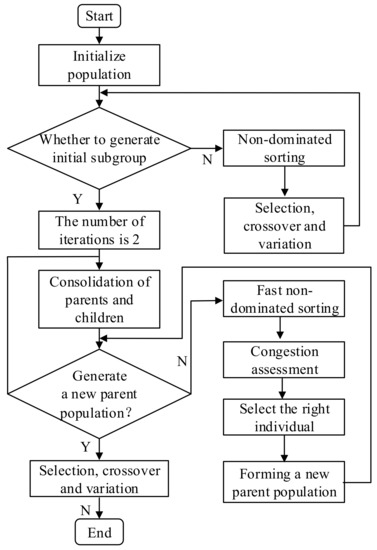
Figure 3.
Flow Diagram of NSGA-II Algorithm.
The NSGA-II algorithm realizes the distribution of the fit value with the help of a fast and non-advantageous sorting method. That is, each individual in the group is divided into different individuals according to their degree of non-dominance. It preliminarily realizes the marking of the individual strengths and weaknesses of the multiple non-dominant layers with the same dominance. Then the objective function between neighboring individuals is calculated, and the individuals are further classified by the congestion index. Combining the above two aspects, the distribution of population fitness is completed. The difference between the two groups can be considered from two aspects. If the two individuals are in the same non-dominated layer, the individuals with the maximum crowding degree will be marked optimally. On the contrary, the individuals with a lower dominant status will be marked as dominant, thus achieving the balance of population diversity in the search process. At the same time, the elite strategy of the NSGA-II algorithm can effectively avoid the loss of excellent individuals in the parent generation. The calculation of the objective function, selection operator, and crossover mutation of the algorithm are the same as those of the genetic algorithm.
The engine, drive motor, and power battery are the main power sources and auxiliary systems of a hybrid electric vehicle. There is an independent driving relationship between the two systems. There are differences in vehicle driving modes under different driving conditions. This mode is related to vehicle speed, target required torque, SOC, and other factors. Therefore, improving the reasonable performance of the drive torque distribution control can effectively ensure that the mode is more stable and rapid in the switching process. It mainly includes the division of the engine operation area and the judgment of the battery status. The driver’s acceleration and braking operation commands are transformed into a demand matrix. When the demand matrix value is greater than 0, the torque relationship between the engine and motor can be expressed as Formula (7).
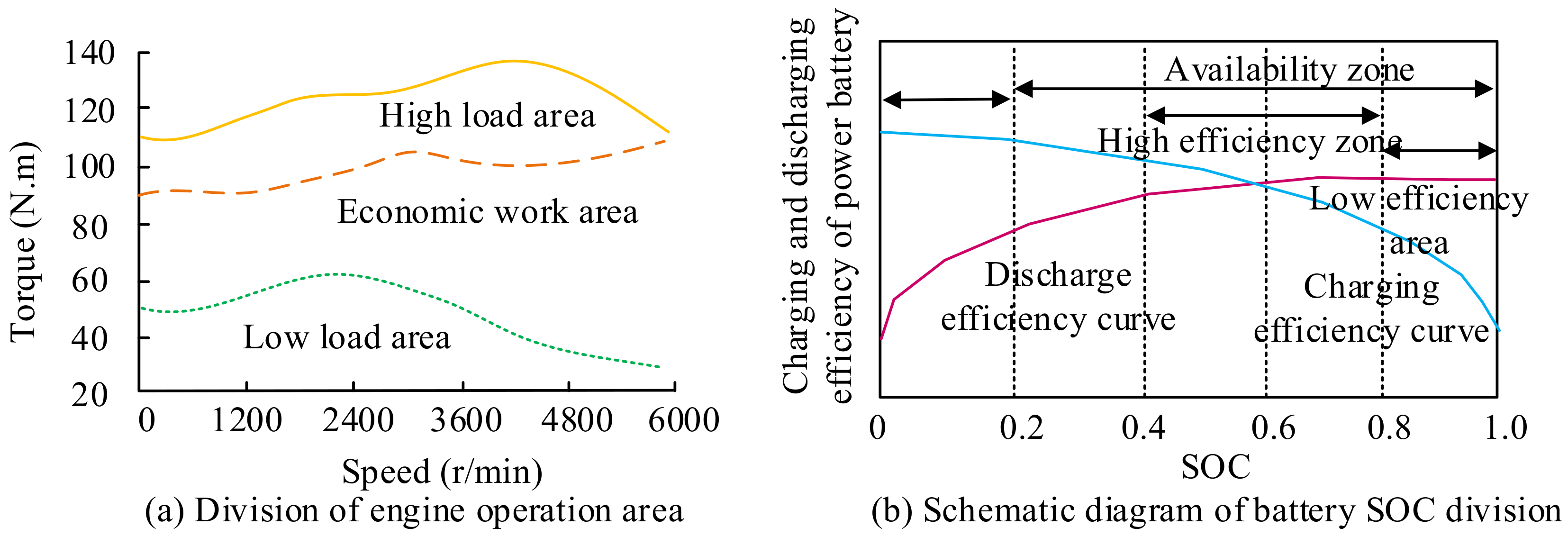
In Formula (7), represents the engine torque. represents the motor torque. The driving mode changes instantaneously during actual driving. Therefore, from the point of view of the logic threshold control, the minimum working torque and the motor assist torque of the motor are designed by the steady-state efficiency characteristic curve of the engine. It is combined with the torque-speed characteristics of the motor to realize the division of the engine working area. The division diagram is shown in Figure 4a.
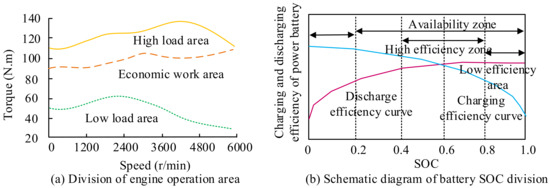
Figure 4.
Engine Operation Area and Battery SOC Division.
In Figure 4b, when the state of charge (SOC) of the battery is high, the value is within the target torque range between curves B-C. At this time, the cooperative control of the control strategy is used to optimize the engine operation point. When the SOC value is low, the engine runs independently and the motor is used as a generator to charge the battery.
4. Application Evaluation of Hybrid Vehicle Energy Consumption Optimization Strategy Based on NSGA-II Genetic Algorithm
The research analyzes the external feature-fitting data of the selected engine. The external characteristics are analyzed through programming with MATLAB software, and the engine torque and power are analyzed at different engine speeds. Table 3 presents the specific data.
Table 3.
Engine Torque and Power at Different Engine Speeds.
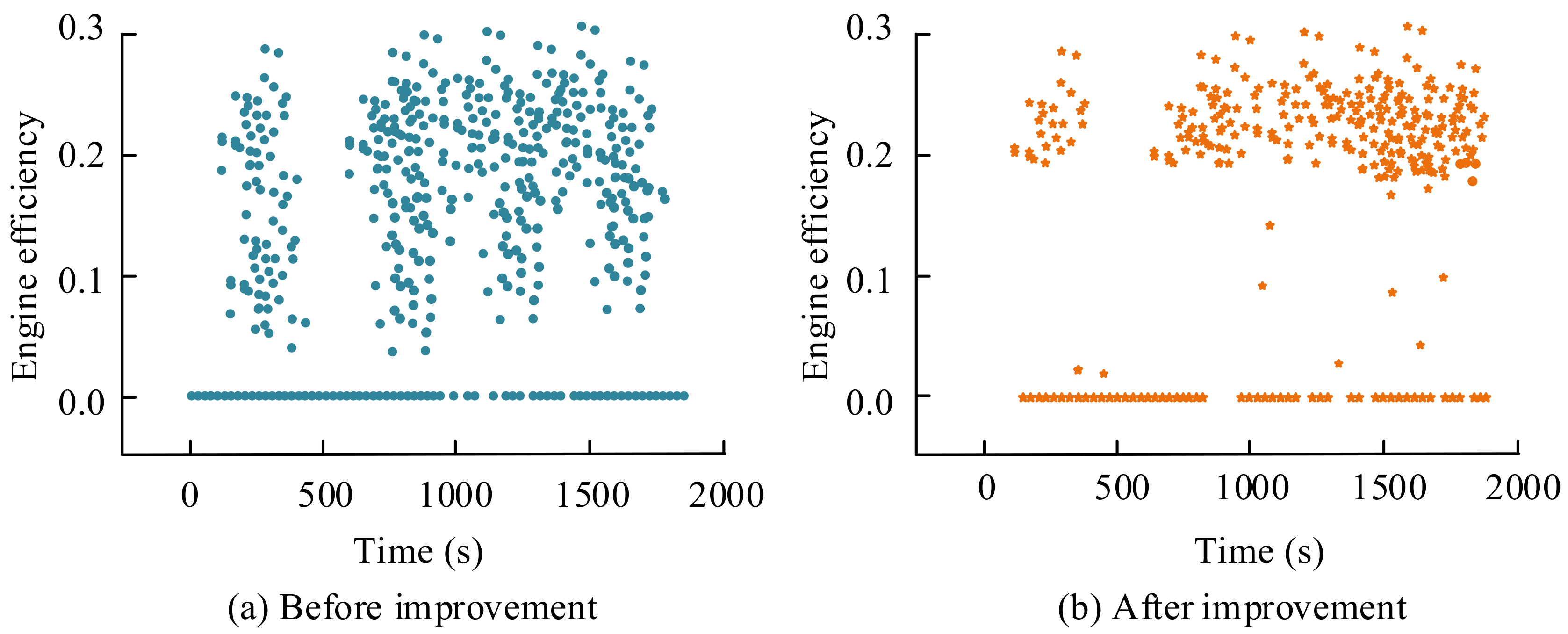
Table 3 shows that when the engine speed is less than 4000, the corresponding engine matrix shows an overall upward trend. After the rotational speed exceeds 4000, the engine matrix value shows a downward trend and the maximum value reaches 103.3 (r/min). The relevant engine power also increases first and then decreases and the engine speed is 5600 N.m. The change in fuel consumption rate reaches the minimum value of 265.4 when the engine speed is 4200. Then the engine efficiency before and after the improvement of the multi-objective optimization algorithm is statistically analyzed. Figure 5 shows the specific results.
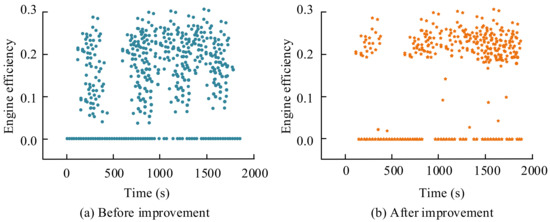
Figure 5.
Engine Efficiency before and after Improvement of Multi-Objective Optimization Algorithm.
Figure 5 shows that before applying the multi-objective optimization algorithm, the working efficiency of the engine changes in varying degrees with the increase in working time. The adjustment of working points is large. After algorithm improvement, the working points of the engine are mostly concentrated in the high-value area, which effectively reduces the energy consumption and improves the efficiency by 13.25%.
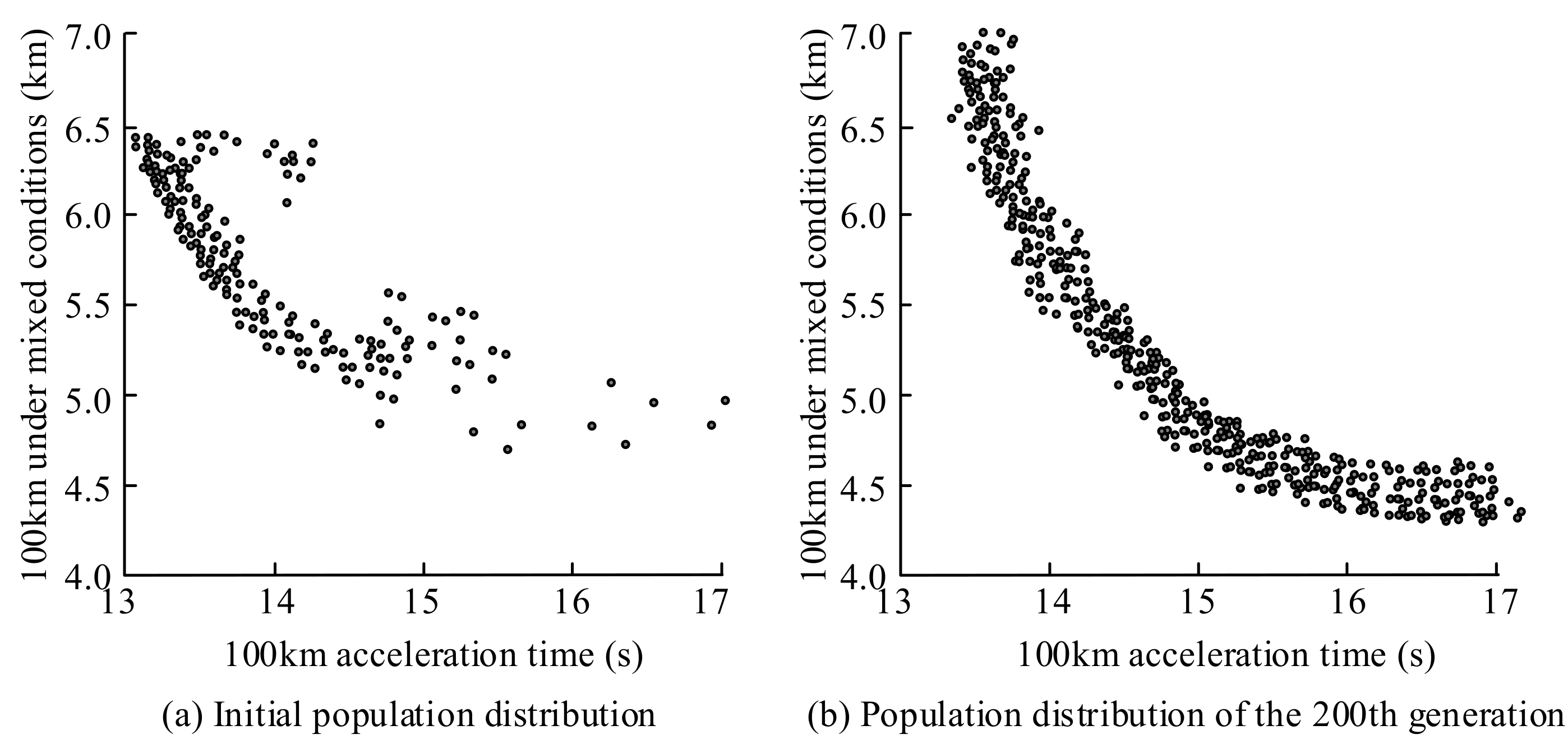
Figure 6 shows the convergence curve changes before and after the improvement, labeled as population points. Figure 6 shows that the convergence curve of population evolution under the initial parameters is relatively scattered. When the acceleration time is greater than 15 s, data loss occurs, the population converges to a small region, and the convergence of the Pareto front is poor. The proposed algorithm is in the optimal solution set when the number of iterations reaches 200. The individuals of each group are evenly distributed and can better maintain the edge individuals, achieving satisfactory optimization results. The Pareto optimal solutions obtained correspond to the corresponding points and there is no difference between good and bad. The ADVISOR simulation system is used to simulate the power performance and fuel economy of the engine. It is optimized to analyze the multi-objective optimization control performance of hybrid electric vehicles. The dynamic characteristics of the vehicle can be fitted by optimizing the gear ratio before and after. Figure 7 shows the relevant dynamic characteristic curve.
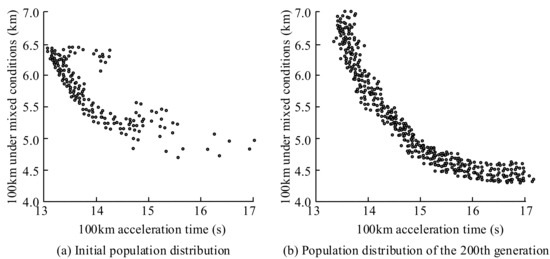
Figure 6.
Multi-Objective Optimization Results.
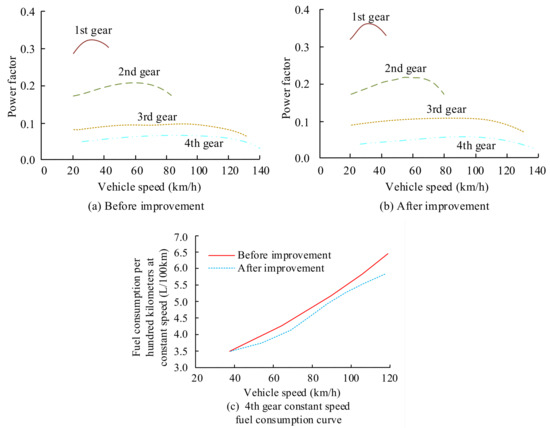
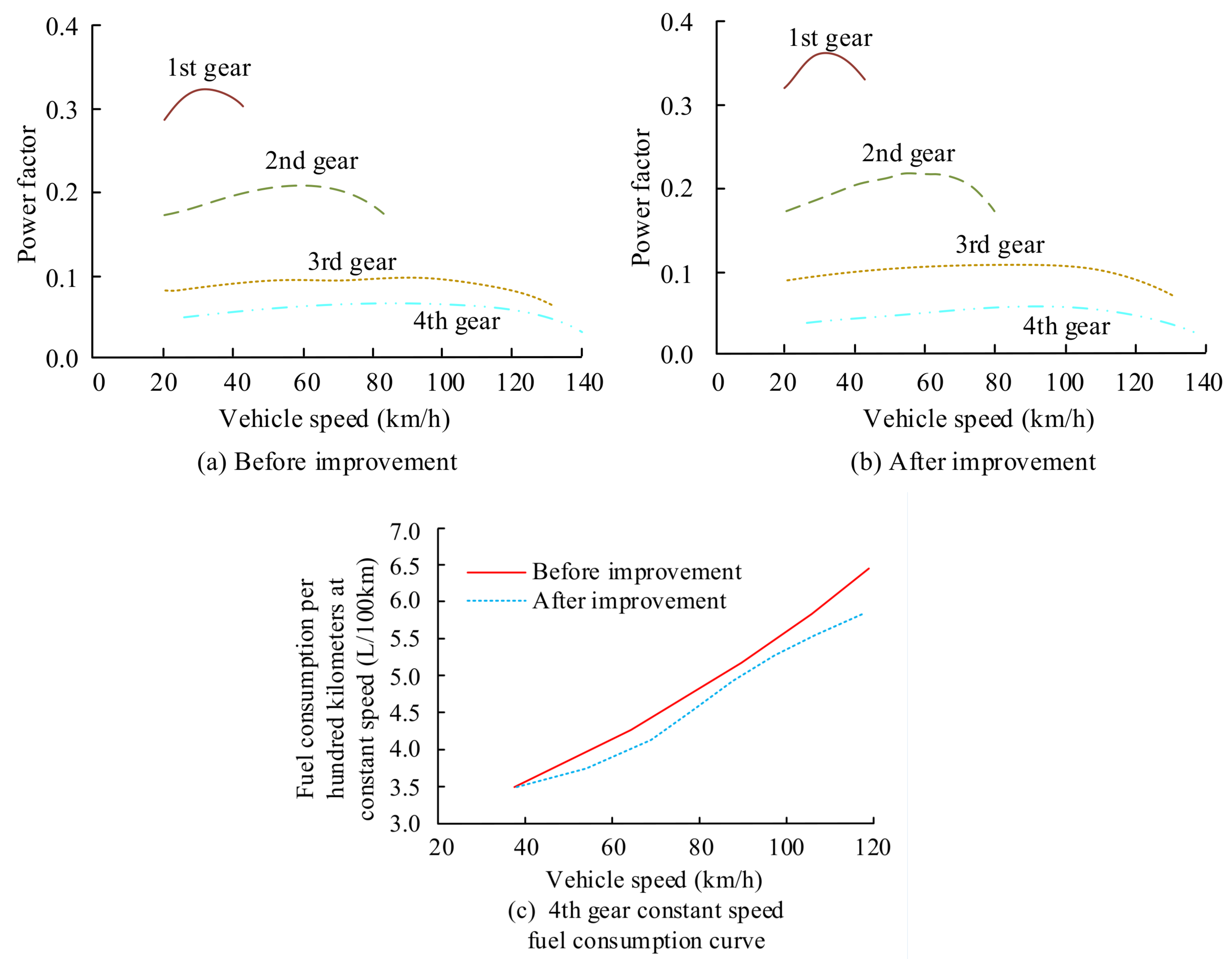
Figure 7.
Power Factor Change of Vehicle Gear at Different Speeds.
Figure 7 shows that the power factor displayed by the different vehicle gears at different speeds is quite different. Specifically, after the improvement, the power factor of the first gear increases by 6.74%, and the power factor of the third gear increases by 14.28%. The dynamic characteristics of gears 1~3 have been greatly improved. The average value of the power factor of the fourth gear, before and after improvement, is 0.48 and 0.45, respectively. There is an average difference range of 2.15% when using the fourth gear in the analysis of the vehicle’s fuel consumption performance. The slope of the fuel consumption curve of the fourth gear at constant speed before the improvement is significantly greater than after the improvement. The maximum fuel consumption reaches 6.45 L/km at 120 km/h. After optimization, the fuel consumption of the fourth gear vehicle at 40 km/h per 100 km decreases by 3.75%. The fuel consumption per 100 km at 80 km/h decreases by 4.92%. The fuel economy has been greatly improved. The results show that this method can improve the power performance of low-grade vehicles and reduce the energy consumption of high-grade vehicles. Table 4 compares the target data of hybrid electric vehicles before and after the algorithm optimization.
Table 4.
Target Data of Hybrid Electric Vehicles before and after Algorithm Optimization.
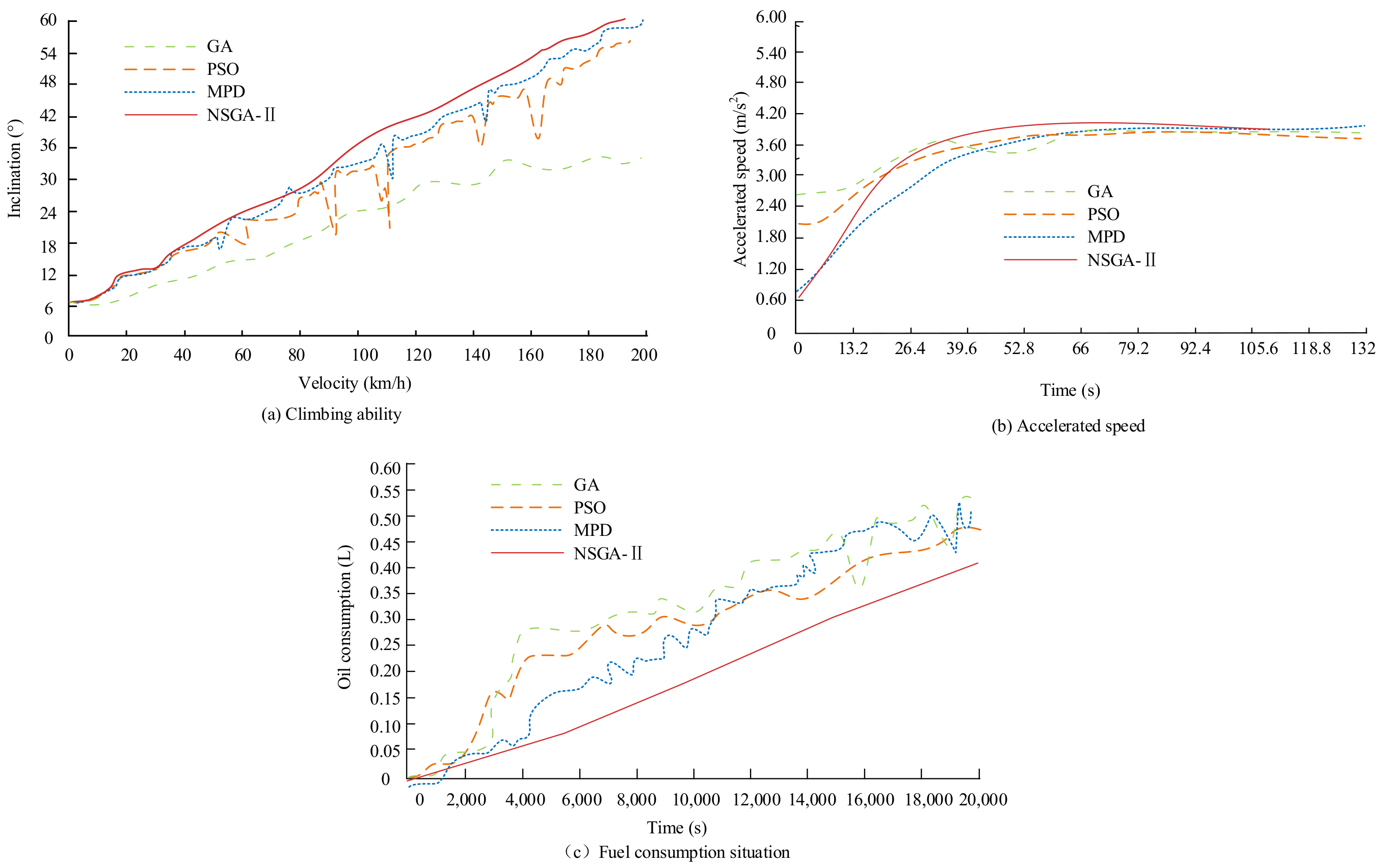
Table 4 shows that the dynamic index and economic index change to a certain extent after the algorithm optimization. Among them, the starting acceleration time and fuel consumption per hundred kilometers have decreased to varying degrees after optimization. The value of mixed fuel consumption at 100 km has changed from 5.41 to 5.21, with a decrease of 1.4%. The maximum climbing gradient of the whole vehicle after improvement is 33.9%. The constant speed fuel consumption of the whole vehicle in different gears has decreased after improvement. The overall performance of the car has been improved. The power factor of direct gear is more than 15%. Therefore, the multi-objective control optimization strategy proposed in the study has good applicability and rationality. We evaluated the vehicle power performance of the NSGA-II genetic algorithm proposed in the study and analyze it from the aspects of climbing ability, acceleration status, and energy consumption. The comparison algorithms are genetic algorithm, particle swarm optimization (PSO), and model predictive adaptive control (MPD) based on the model’s prediction. The results are shown in Figure 8.
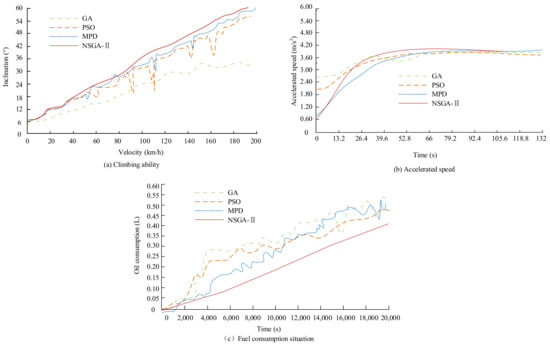
Figure 8.
Climbing Ability, Acceleration Status, and Energy Consumption of Four Algorithms in Automotive Power Applications.
The results in Figure 8 indicate that, in terms of climbing ability, the performance of the four algorithms from large to small is: NSGA-II > MPD > PSO > GA. Among them, the average number of climbing degrees of the PSO algorithm and the GA is small at different driving speeds, and the overall node fluctuation is more obvious. Although the MPD algorithm performs well and the overall curve changes smoothly, its climbing curve slope is smaller than the NSGA-II proposed in the study. In terms of vehicle acceleration status, the NSGA-II algorithm and MPD algorithm spend less time on acceleration improvements, and the overall performance is relatively stable. When the time is greater than 13.2 s, the NSGA-II algorithm still has a different amplitude of 0.64% compared to the MPD algorithm. In terms of fuel consumption, the proportion of fuel consumption for the four algorithms varies from high to low: GA > PSO > MPD > NSGA-II. The overall fuel consumption of the NSGA-II algorithm proposed in the study is relatively low, and there are fewer fluctuations under power acceleration. The above results indicate that the NSGA-II algorithm can achieve energy consumption optimization while retaining the power of the vehicle and maintaining a relatively stable driving state of the power vehicle.
5. Conclusions
Improving the power and fuel economy of hybrid electric vehicles is an important measure to ensure application efficiency. Based on the original genetic algorithm, the energy consumption optimization strategy is established with the goal of multi-objective optimization. The optimization results show that when the engine speed is less than 4000, the corresponding engine matrix shows an overall upward trend. After the rotational speed exceeds 4000, the engine matrix value shows a downward trend and the maximum value reaches 103.3 (r/min). After applying the multi-objective optimization algorithm, the working points of the engine are mostly concentrated in the high-value area, which effectively reduces the energy consumption and improves the efficiency by 13.25%. After improvement, the power factor of the first gear increases by 6.74%. The power factor of the third gear increases by 14.28%. The average value of the power factor of the fourth gear, after improvement, is 0.48 and 0.45 respectively. There is an average difference range of 2.15% when using the fourth gear in the analysis of vehicle fuel consumption performance. The fuel consumption of fourth gear vehicles at 40 km/h and 80 km/h per hundred kilometers decreases by 3.75% and 4.92%. The fuel economy has been greatly improved. The consumption of mixed fuel decreases by 1.4%. The maximum climbing gradient of the whole vehicle after improvement is 33.9%. The power factor of the direct gear of the maximum power factor shows an increase of more than 15%. The above results show that the vehicle’s energy consumption strategy, under multi-objective control, can effectively reduce the vehicle’s energy consumption. Strengthening the stability analysis of the engine in the actual driving process is an aspect that needs further attention in future research.
Author Contributions
Conceptualization, writing—original draft preparation, data curation, X.W. and W.J.; methodology, W.J.; writing—review and editing, formal analysis, Y.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
All the data used in the study is in the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zhang, Q.; Wu, X.J.; Yuan, Y.; Xu, S.; Lu, Z. Research on power transmission optimisation of dual motor coupling drive for pure electric car based on genetic algorithm. Int. J. Veh. Syst. Model. Test. 2022, 16, 165–181. [Google Scholar] [CrossRef]
- Lee, W.; Jeung, H.; Park, D.; Kim, N. An adaptive concept of PMP-based control for saving operating costs of extended-range electric vehicles. IEEE Trans. Veh. Technol. 2019, 68, 11505–11512. [Google Scholar] [CrossRef]
- Rabbani, M.; Akbarian-Saravi, N.; Ansari, M.; Musavi, M. A bi-objective vehicle-routing problem for optimization of a bioenergy supply chain by using NSGA-II algorithm. J. Qual. Eng. Prod. Optim. 2020, 5, 87–102. [Google Scholar]
- Fatemi-Anaraki, S.; Mokhtarzadeh, M.; Rabbani, M.; Abdolhamidi, D. A hybrid of K-means and genetic algorithm to solve a bi-objective green delivery and pick-up problem. J. Ind. Prod. Eng. 2022, 39, 146–157. [Google Scholar] [CrossRef]
- Dhiman, G.; Kaur, A. HKn-RVEA: A novel many-objective evolutionary algorithm for car side impact bar crashworthiness problem. Int. J. Veh. Des. 2019, 80, 257–284. [Google Scholar] [CrossRef]
- Fu, J.; Fu, Z.; Song, S. Energy management strategy integrating self-adaptive adjustment and Pontryagin’s minimum principle-based optimization for fuel-cell hybrid electric vehicle. Optim. Control Appl. Methods 2022, 43, 1059–1075. [Google Scholar] [CrossRef]
- Shi, D.; Liu, S.; Cai, Y.; Wang, S.; Chen, L. Pontryagin’s minimum principle based fuzzy adaptive energy management for hybrid electric vehicle using real-time traffic information. Appl. Energy 2021, 286, 116467. [Google Scholar] [CrossRef]
- Zhang, Q.Y.; Luo, Y.J.; Lin, W.P.; Wang, Y.R.; Wu, X.J. Control and optimisation of a dual-motor coupling drive system of pure electric vehicle based on multi-island genetic algorithm. Int. J. Electr. Hybrid Veh. 2021, 13, 21–37. [Google Scholar] [CrossRef]
- Huang, M.; Shi, C.; Zhu, Y.; Zhang, J.; Zhang, F. Design of gerotor pump and influence on oil supply system for hybrid transmission. Energies 2021, 14, 5649. [Google Scholar] [CrossRef]
- Pan, Z.; Fang, S. Combined random forest and NSGA-II for optimal design of permanent magnet arc motor. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 10, 1800–1812. [Google Scholar] [CrossRef]
- Kumar, S.; Gupta, A.K.; Chandna, P.; Bhushan, G.; Kumar, A. A novel approach of GEF and GA for the optimization of multi-objective wire EDM process during the machining of DC53 super alloy. Proc. Inst. Mech. Eng. Part E J. Process Mech. Eng. 2021, 235, 1119–1131. [Google Scholar] [CrossRef]
- Xue, B. Petri-net based multi-objective optimization in multi-UAV aided large-scale wireless power and information transfer networks. Remote Sens. 2021, 13, 2611–2629. [Google Scholar]
- Liang, J.; Li, Y.; Jia, W.; Lin, W.; Ma, T. Comparison of two energy management strategies considering power system durability for PEMFC-LIB hybrid logistics vehicle. Energies 2021, 14, 3262. [Google Scholar] [CrossRef]
- Dutta, J.; Barma, P.S.; Mukherjee, A.; Kar, S.; De, T. A hybrid multi-objective evolutionary algorithm for open vehicle routing problem through cluster primary-route secondary approach. Int. J. Manag. Sci. Eng. Manag. 2022, 17, 132–146. [Google Scholar] [CrossRef]
- Yuen, T.J.; Ramli, R. Multi-objective optimization of all-wheel drive electric formula vehicle for performance and energy efficiency using evolutionary algorithms. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 1472–1479. [Google Scholar] [CrossRef]
- Ferreira, J.C.; Steiner, M.T.A. A Bi-objective green vehicle routing problem: A new hybrid optimization algorithm applied to a newspaper distribution. J. Geogr. Inf. Syst. 2021, 13, 410–433. [Google Scholar] [CrossRef]
- Xu, W.; Pi, D.; Wang, H.; Xie, B. Improved NSGA-II to solve a novel multi-objective task allocation problem with collaborative tasks. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 3106–3123. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, J.; Tang, J.; Wang, W.; Wang, X. Scheduling optimisation of multi-type special vehicles in an airport. Transp. B Transp. Dyn. 2022, 10, 954–970. [Google Scholar] [CrossRef]
- Luo, Z.; Wei, X.; Pearce MG, S.; Covic, G.A. Multiobjective optimization of inductive power transfer double-D pads for electric vehicles. IEEE Trans. Power Electron. 2020, 36, 5135–5146. [Google Scholar] [CrossRef]
- Yin, C.; Wang, S.; Yu, C.; Li, J.; Zhang, S. Fuzzy optimization of energy management for power split hybrid electric vehicle based on particle swarm optimization algorithm. Adv. Mech. Eng. 2019, 11, 1687814019830797. [Google Scholar] [CrossRef]
- Redsell, M.; Lucas, G.G.; Ashford, N.J. Factors affecting car fuel consumption. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 1993, 207, 1–22. [Google Scholar] [CrossRef]
- Sundstrom, O.; Binding, C. Flexible charging optimization for electric vehicles considering distribution grid constraints. IEEE Trans. Smart Grid 2011, 3, 26–37. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).