



Bi-Level Inverse Robust Optimization Dispatch of Wind Power and Pumped Storage Hydropower Complementary Systems

Abstract
1. Introduction
2. Inverse Robust Optimization Preliminaries
- (1)
- The mapping function satisfies .
- (2)
- There is no region that satisfies both and , so that .
3. Bi-Level Inverse Robust Model for Wind Power–PSH Complementary Systems
- (1)
- Power balance constraints:where is the total power load.
- (2)
- Generation limit constraints:where are the lower/upper limits of thermal unit i, respectively. are the lower/upper output limits of wind farm j, respectively.
- (3)
- Climbing constraints for thermal units:where are the maximum upward/downward ramping rates, respectively. is the dispatch time interval.
- (4)
- Spinning reserve constraints:where is the binary variable and denotes the working state of thermal unit i at period t; are the minimum/maximum feasible outputs of thermal unit i at period t; and are the upward/downward requirements of power systems at period t. are the spinning reserve rates of the thermal unit and the wind farm.
- (5)
- Transmission constraints:where are the lower/upper power flow limits of line l and denotes the power transfer distribution factors from unit i to line l.
- (6)
- Minimum on and off time constraints:where are the start-up/shut-down times of thermal unit i at period t − 1, respectively and represent the minimum start-up/shut-down times of the thermal power unit i.
- (7)
- PSH’s capacity constraints:
- (8)
- Start–stop frequency constraints:where is the maximum daily start–stop times of PSH k. Frequent starts and stops can accelerate the deterioration of the generator, leading to increased maintenance requirements, higher repair costs, and a potentially shorter operational lifespan. Equation (19) refers to limitations imposed on how frequently the PSH can be start up or shut down within a given period. When the PSH k starts up or shuts down, is equal to 1. Summing up over an operating cycle T yields the total number of start-ups and shut-downs of PSH k.
- (9)
- Ideal perturbation constraint:
4. Solution Procedure
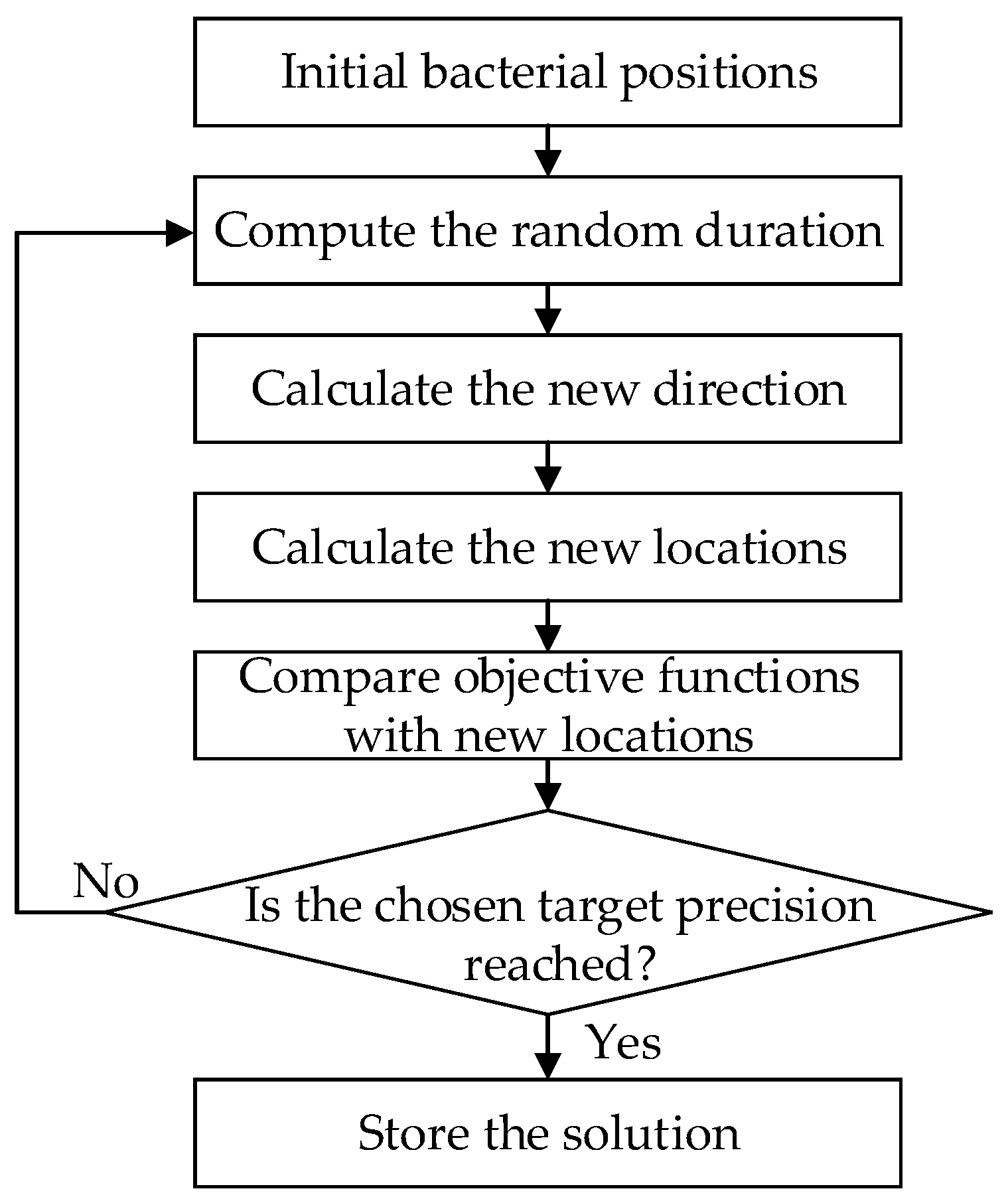
4.1. Brief Introduction of the Multi-Objective Bacterial Colony Chemotaxis Algorithm
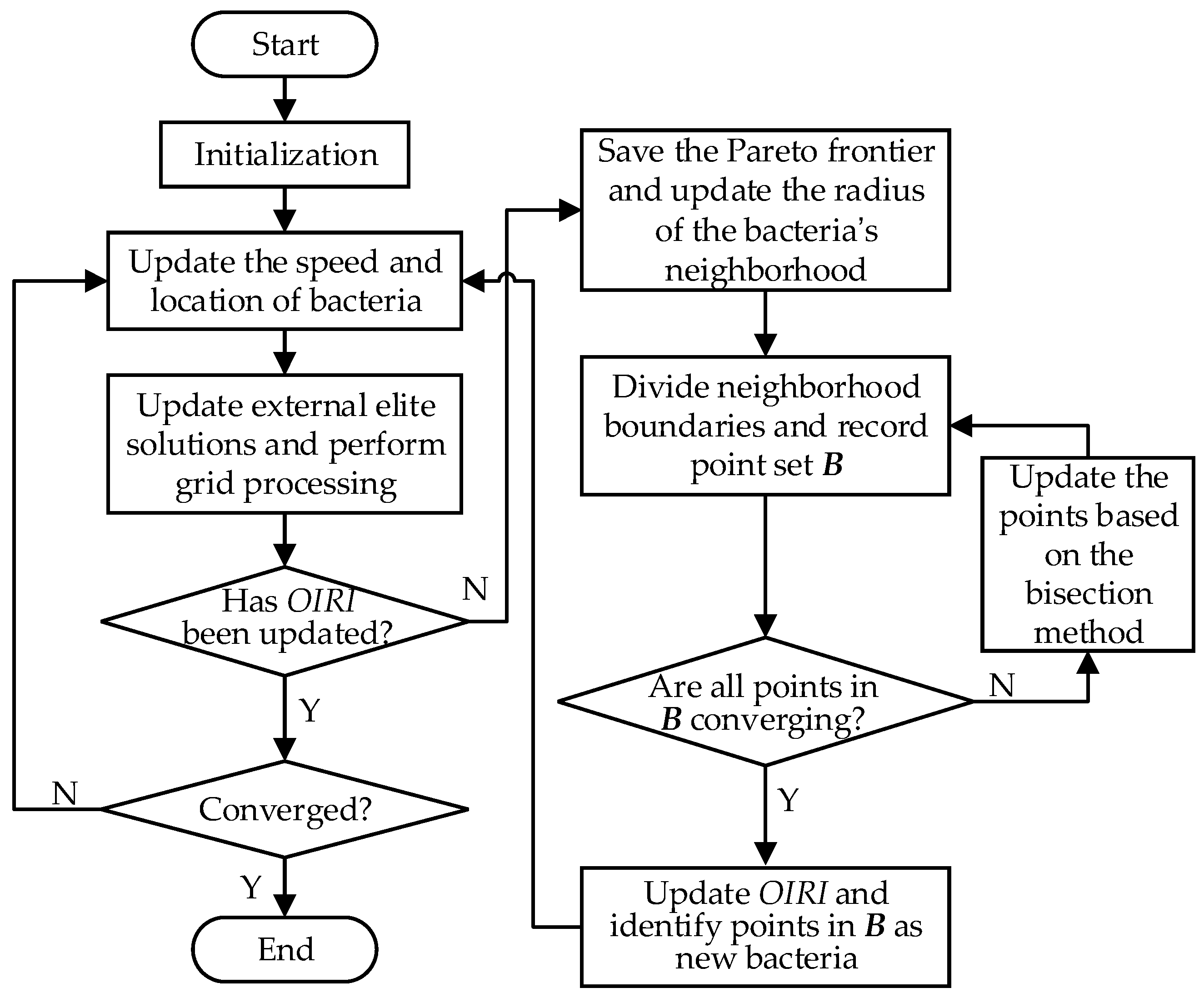
4.2. Solution Method for the Bi-Level Inverse Robust Model
5. Case Study
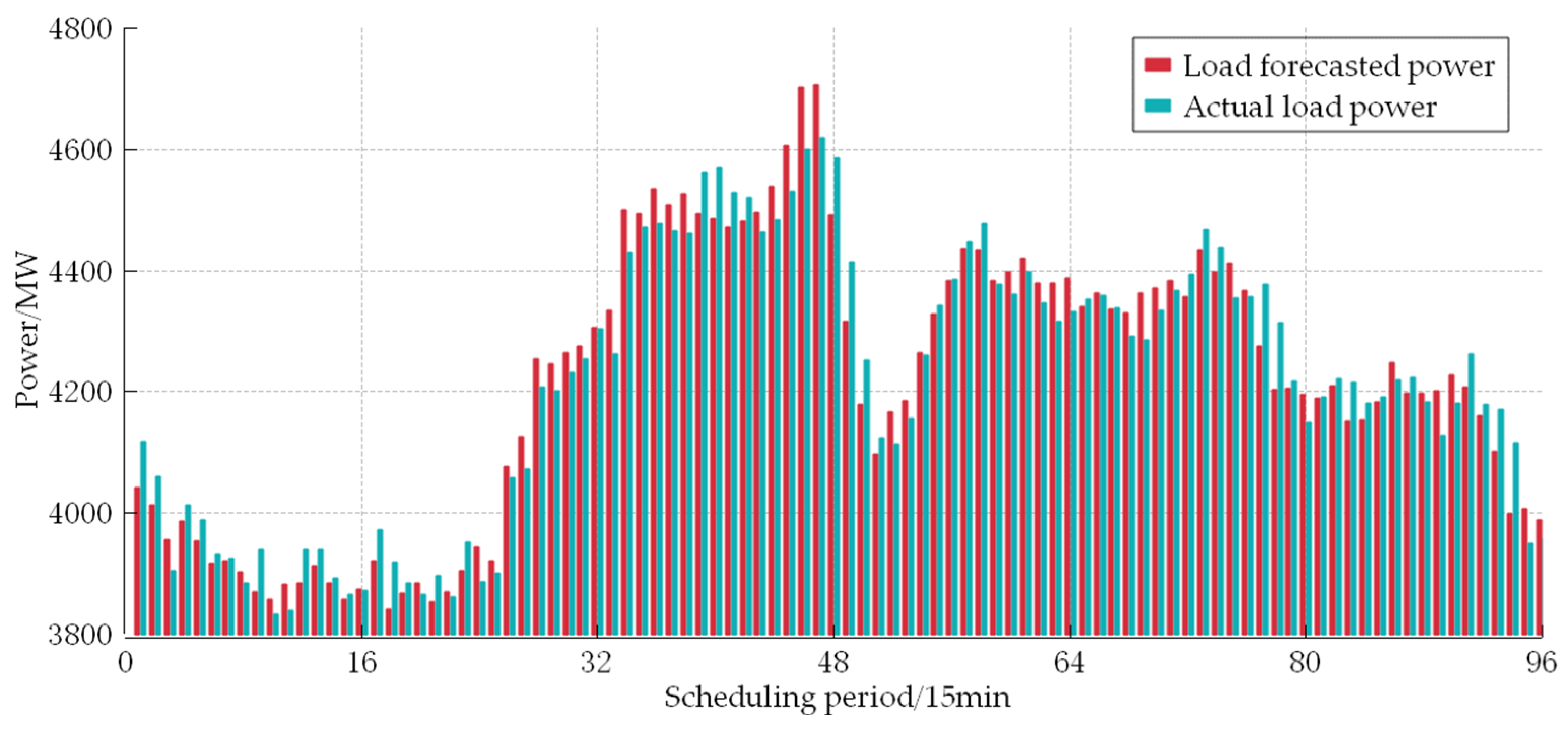
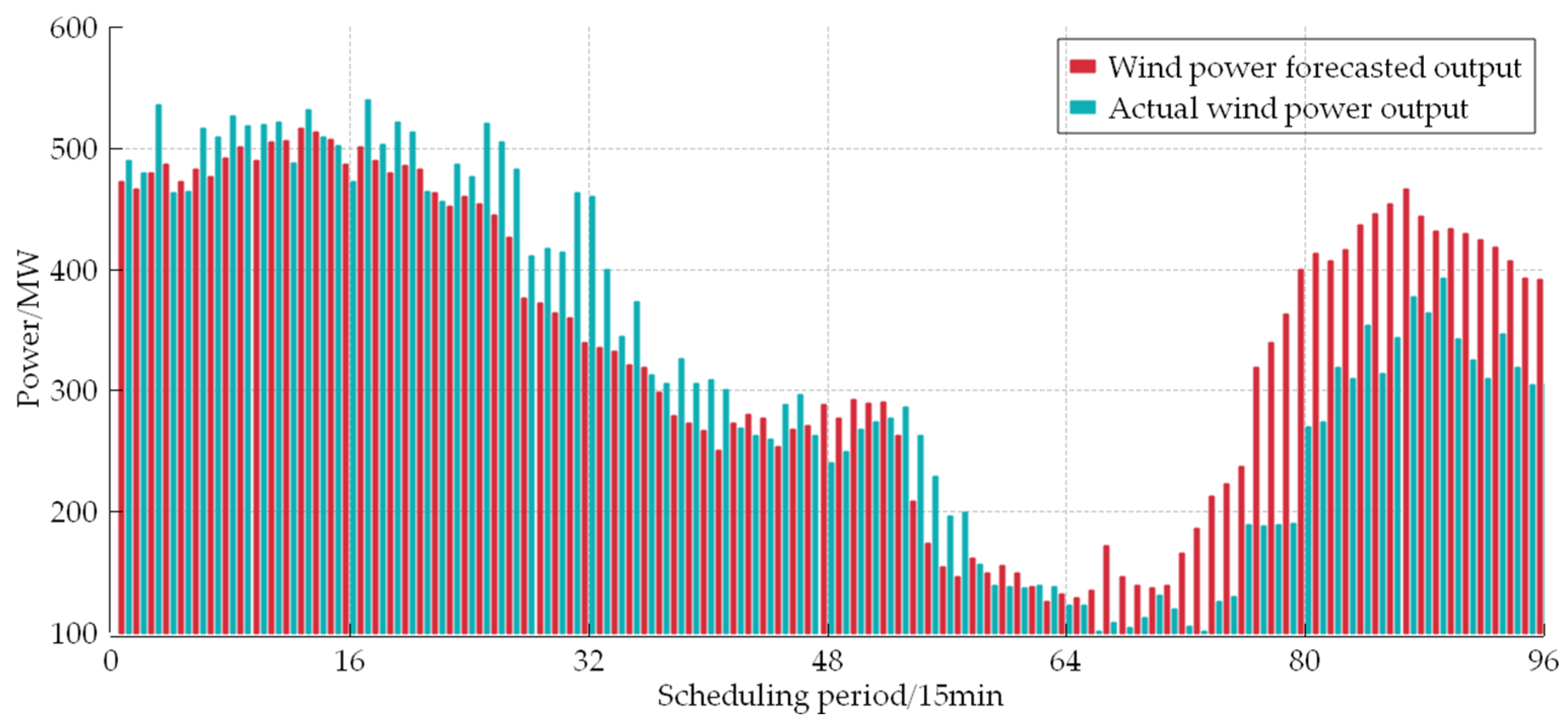
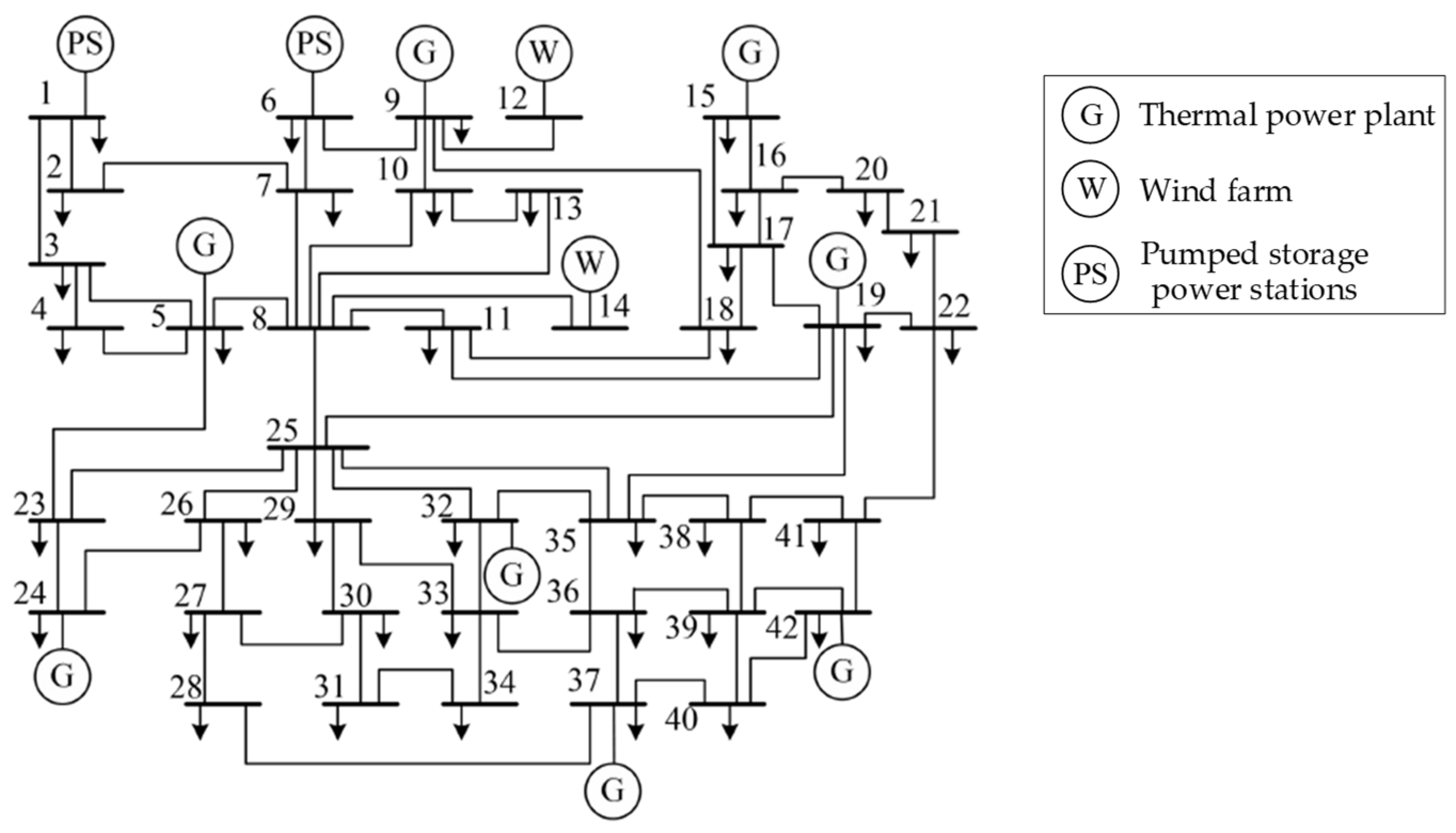
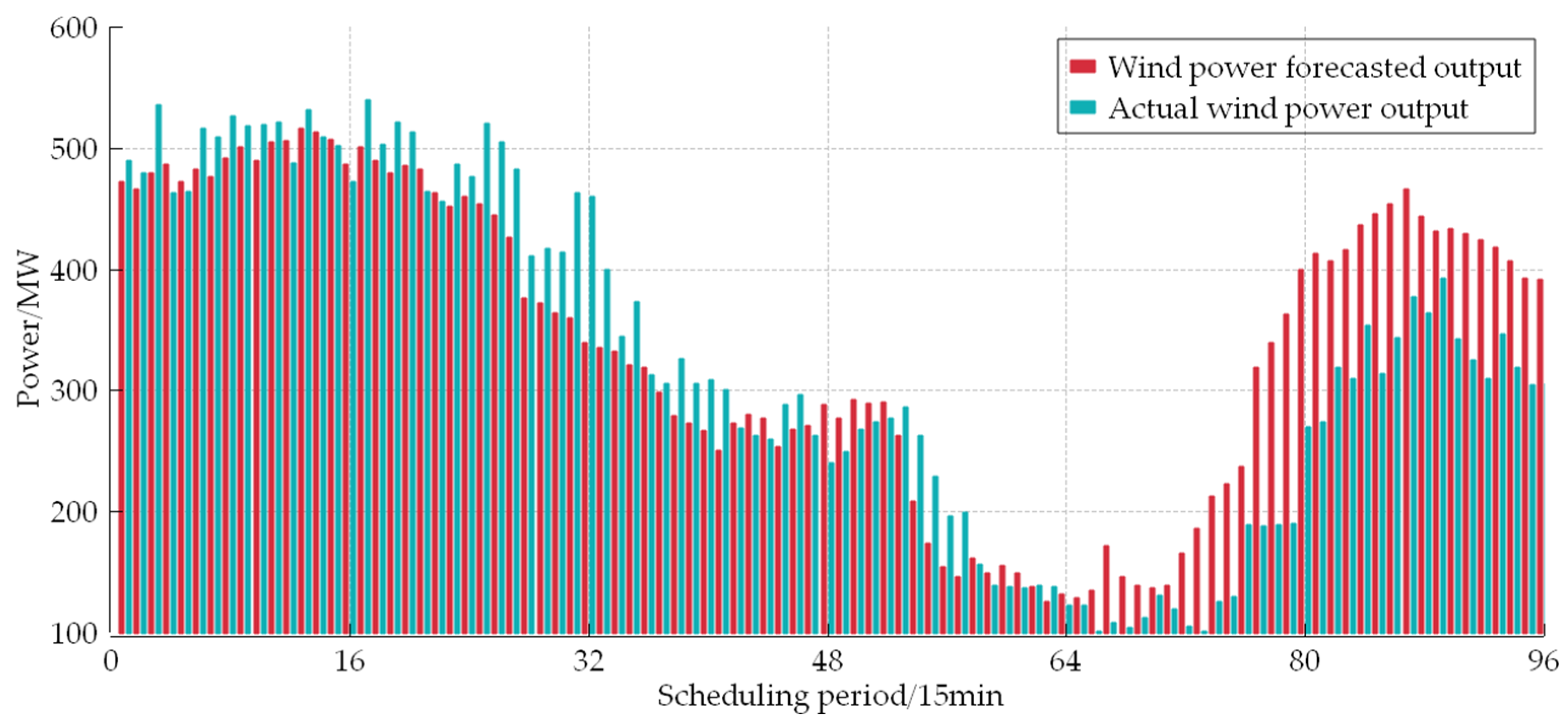
5.1. Modified 42-Bus Power System
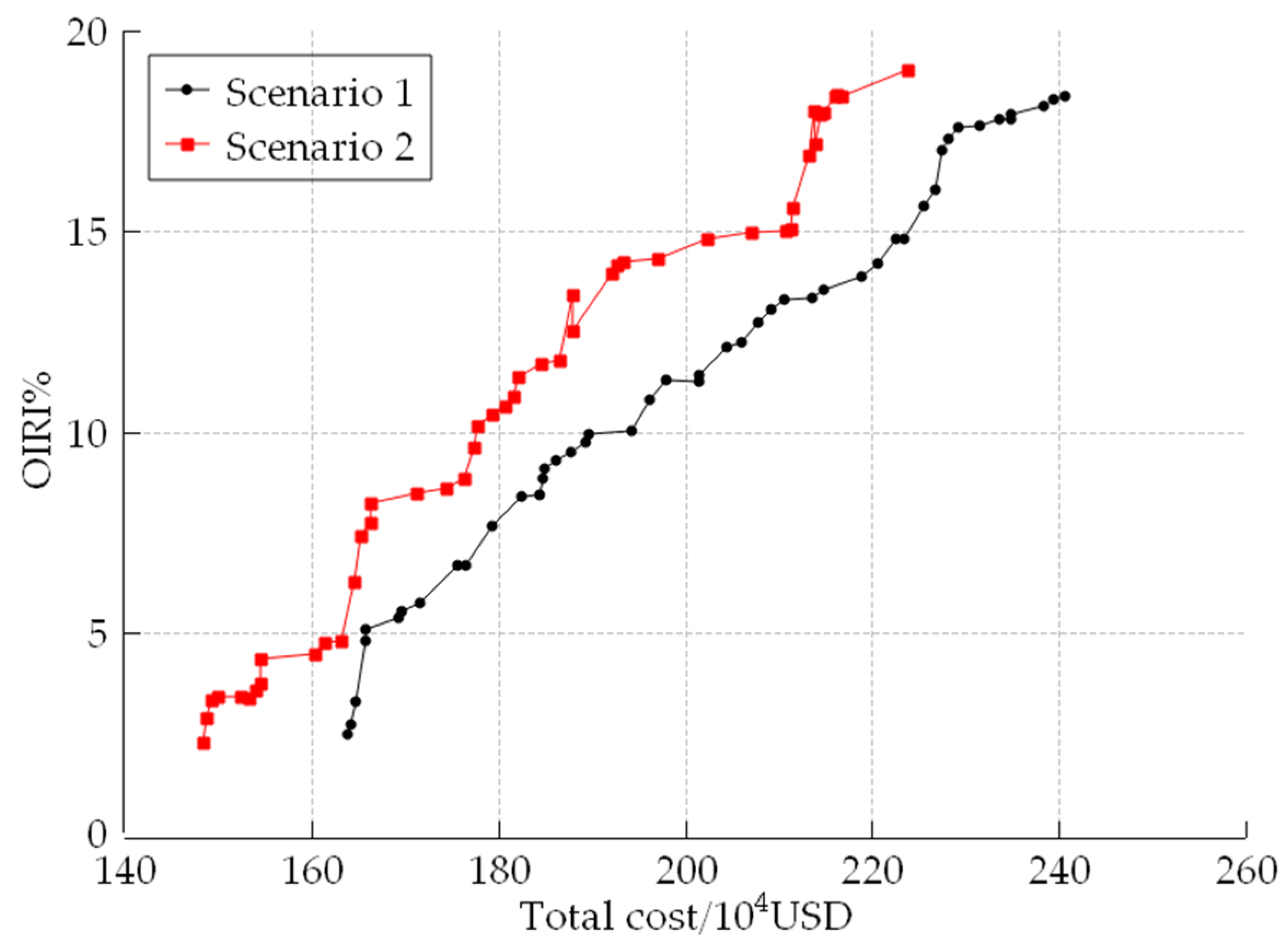
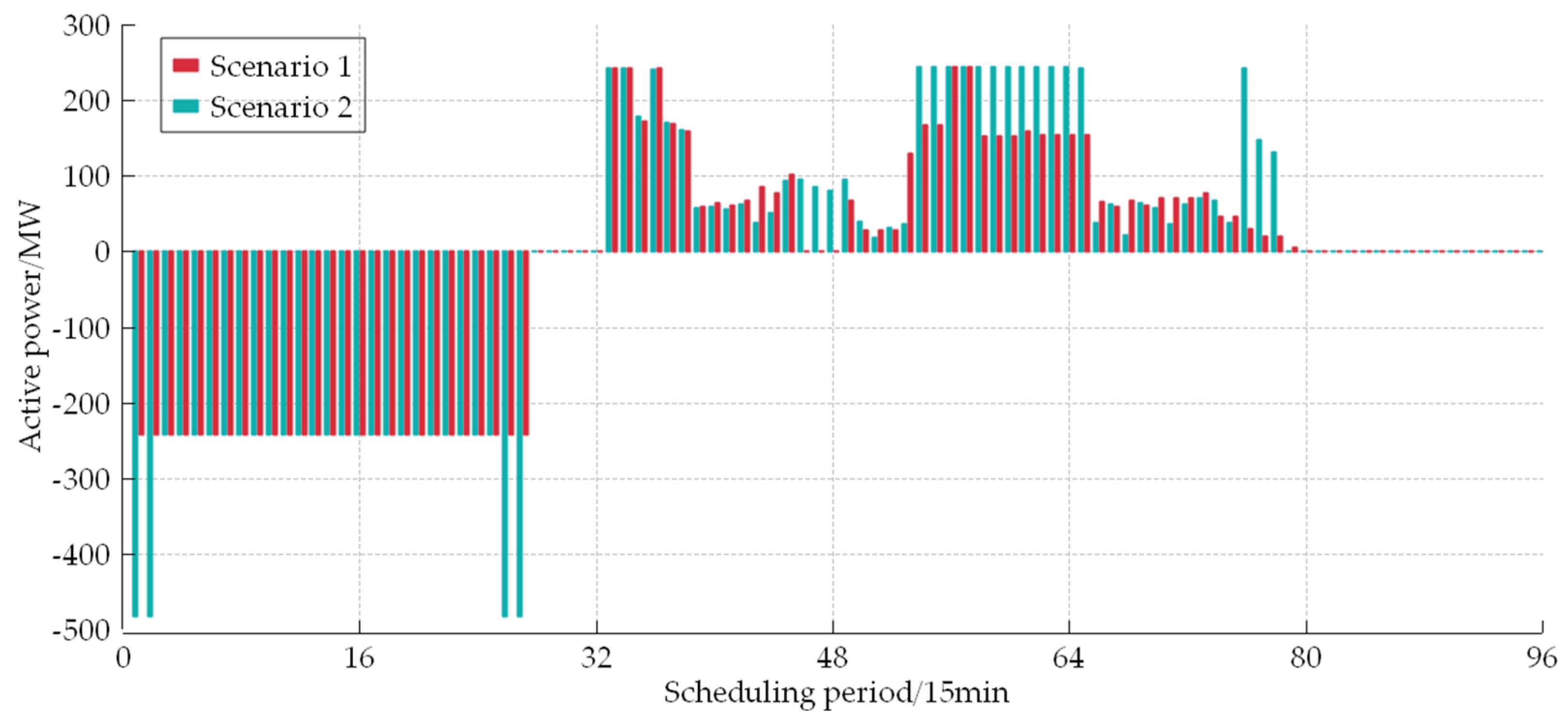
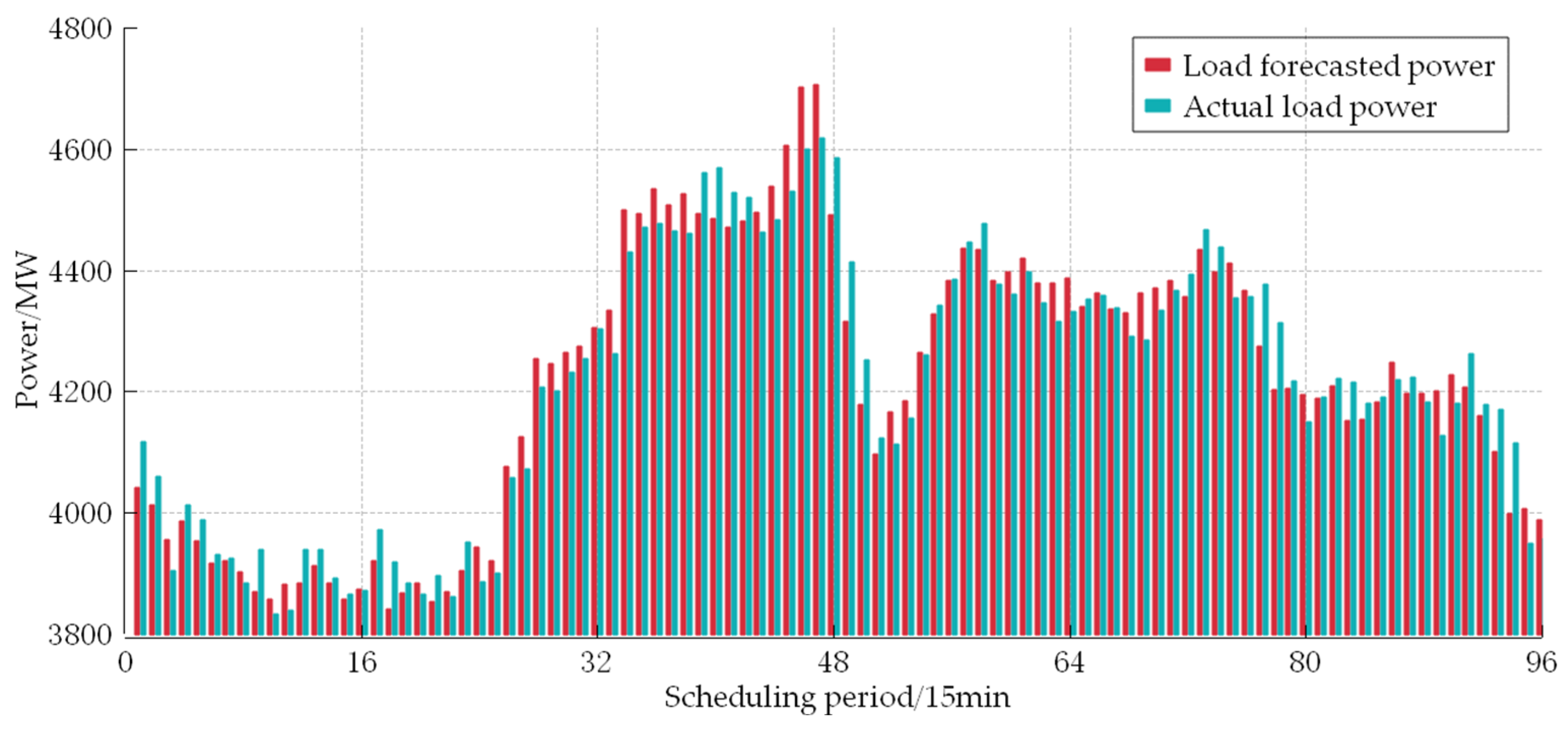
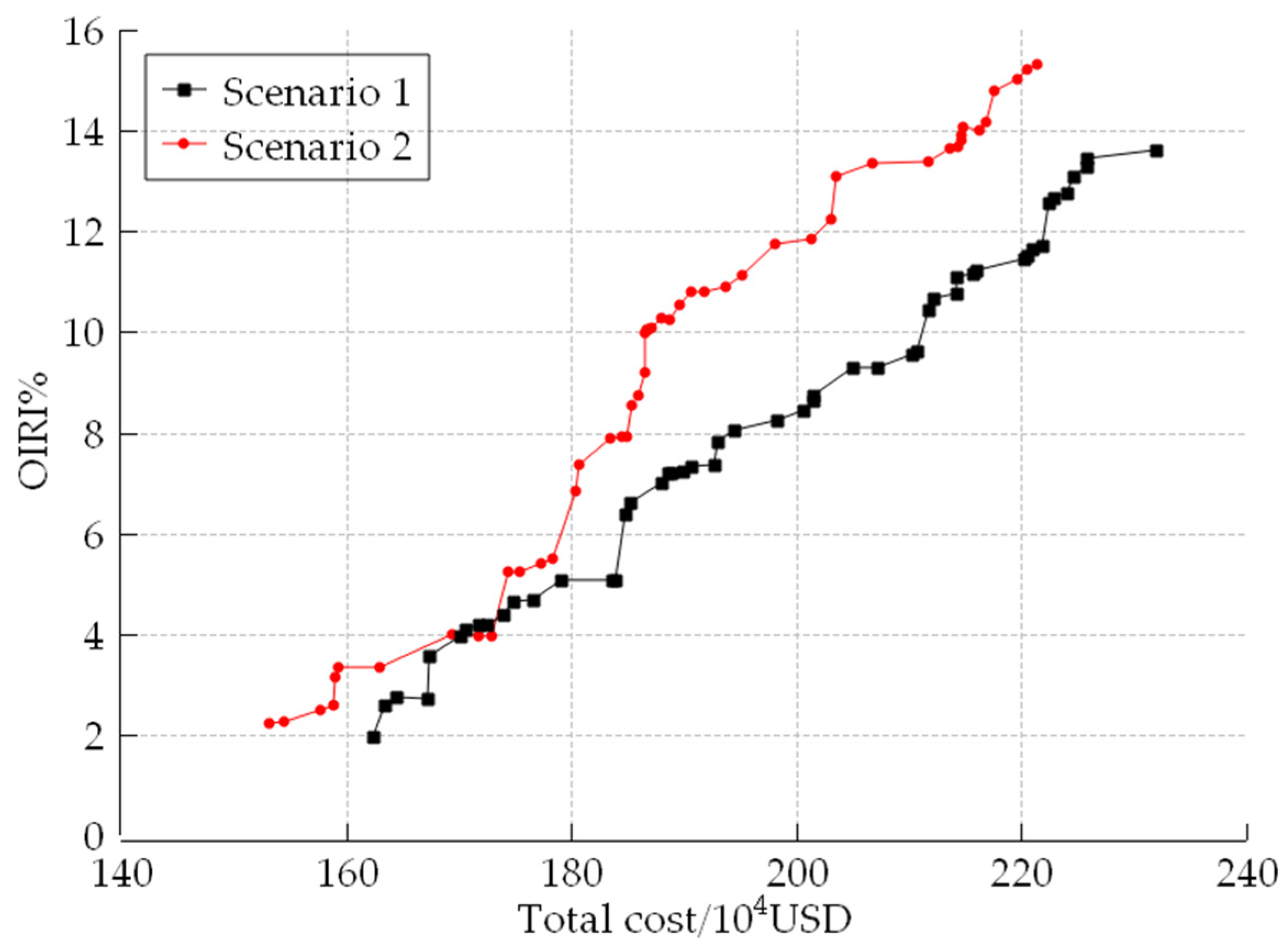
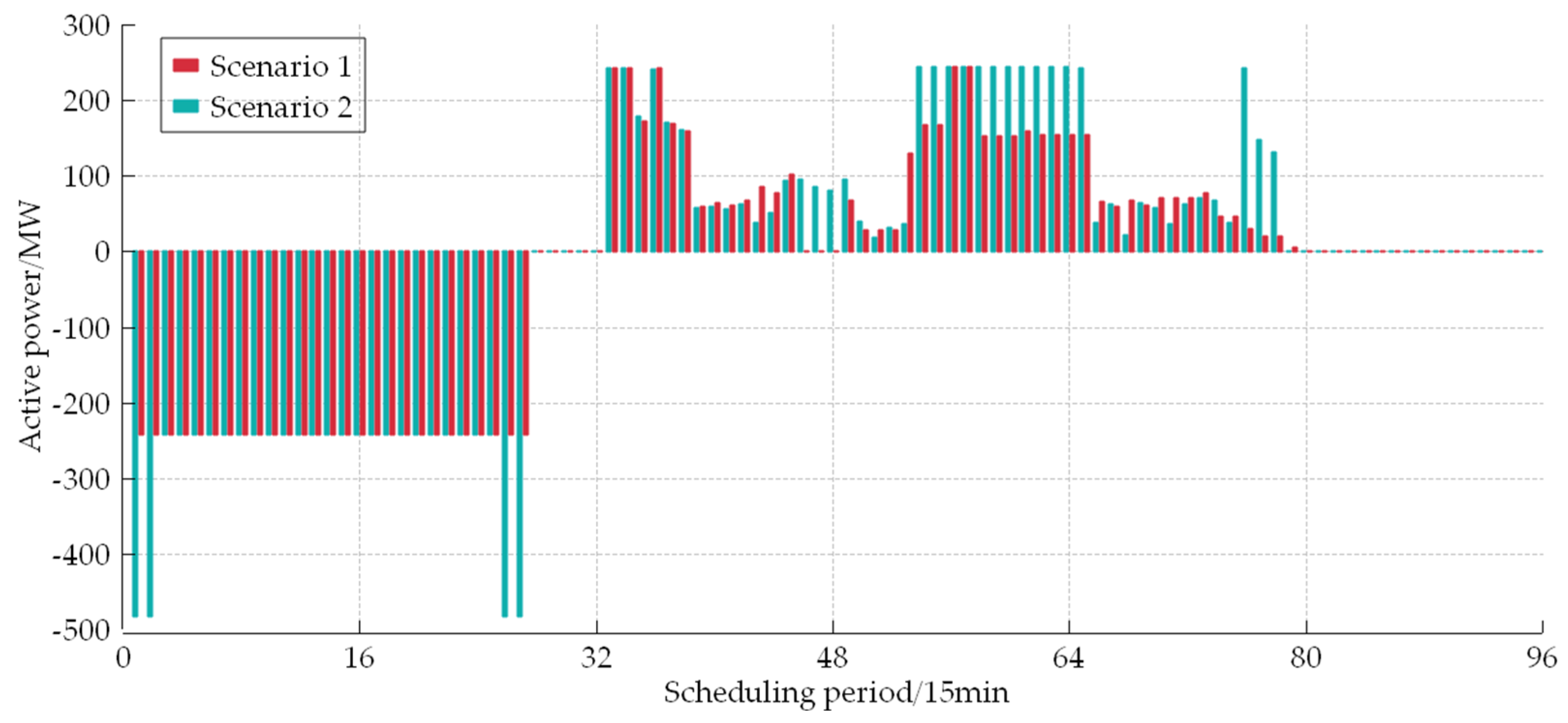
5.2. Inverse Robust Optimization Results Analysis
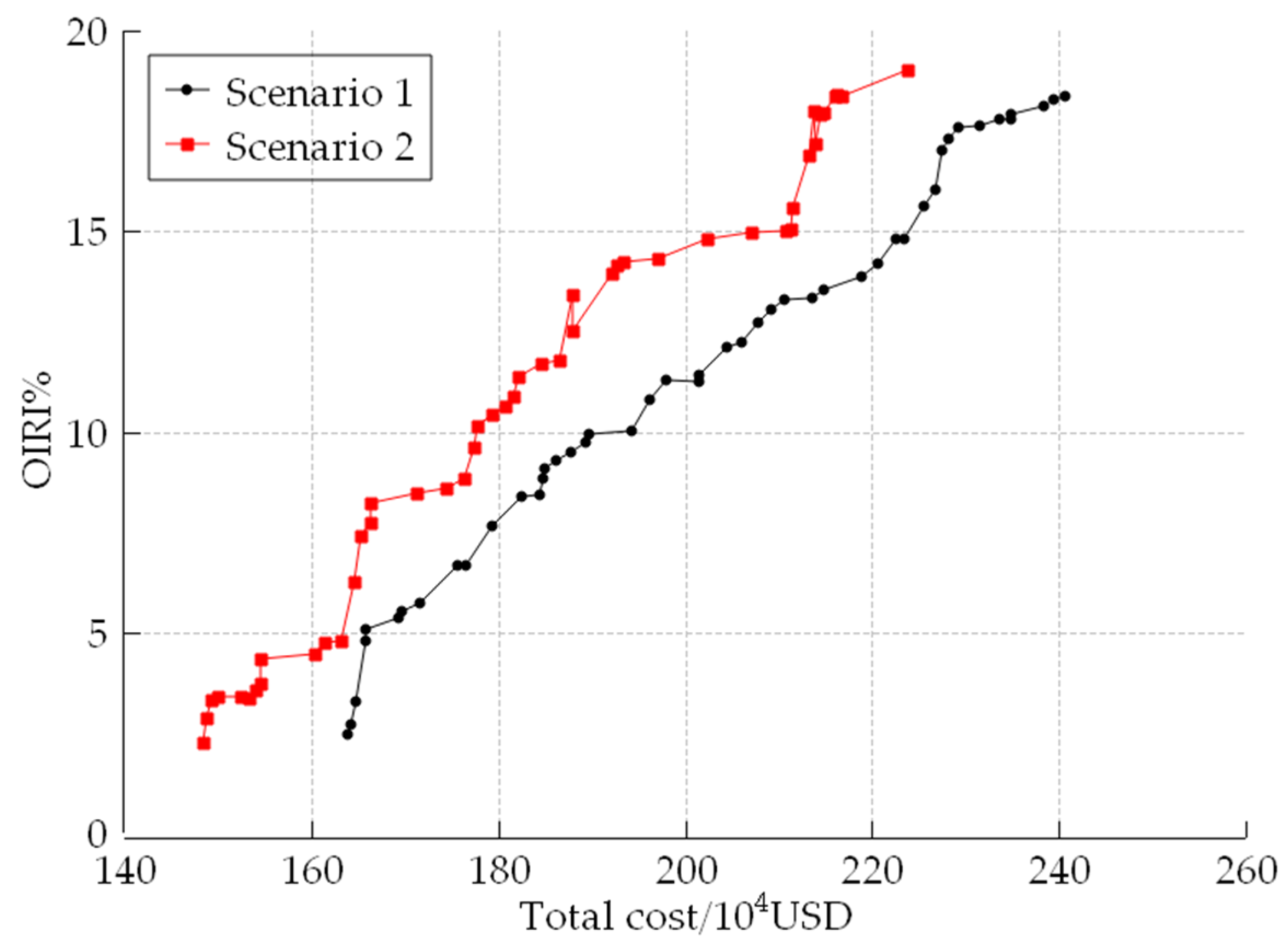
5.3. Indictor Comparison Analysis
5.4. Large-Scale System Testing
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| J | Number of inequality constraints |
| K | Number of equality constraints |
| T | Number of dispatch time intervals |
| ∆T | Dispatch time interval |
| m-dimensional vector consisting of ideal disturbance coefficients | |
| Number of thermal units | |
| Number of wind farms | |
| Number of pumped storage hydropower | |
| Output power of wind farm j in the inner level at period t | |
| Forecasted power of wind farm j in the inner level at period t | |
| Output power of wind farm j in the outer level at period t | |
| Output power of PSH j in the inner level at period t | |
| Forecasted power of PSH j in the inner level at period t | |
| Penalty coefficients | |
| Binary variable; it equals 1/0 if equipment i is ON/OFF at period t | |
| Start-up/shut-down cost of the PSH k | |
| Lower/upper limits of thermal unit i | |
| Lower/upper output limits of wind farm j | |
| Maximum upward/downward ramping rates of thermal unit i | |
| Minimum/maximum feasible outputs of thermal unit i at period t | |
| Upward/downward requirement of power systems at period t | |
| Spinning reserve rates of thermal unit and wind farm | |
| Lower/upper power flow limits of line l | |
| Power transfer distribution factors from unit i to line l | |
| Start-up/shut-down time of thermal unit i at period t−1 | |
| Minimum start-up/shut-down time of the thermal power unit i | |
| Energy conversion efficiency of PSH k | |
| Maximum daily start–stop times of PSH k | |
| Predefined convergence accuracy | |
| Cost function of thermal unit i at period t | |
| Sum of start-up and shut-down costs |
References
- Zhao, J.F.; Oh, U.J.; Park, J.C.; Park, E.S.; Im, H.B.; Lee, K.Y.; Choi, J.S. A Review of World-wide Advanced Pumped Storage Hydropower Technologies. IFAC-Pap. 2022, 55, 170–174. [Google Scholar] [CrossRef]
- Javed, M.S.; Ma, T.; Jurasz, J.; Amin, M.Y. Solar and Wind Power Generation Systems with Pumped Hydro Storage: Review and Future Perspectives. Renew. Energy 2020, 148, 176–192. [Google Scholar] [CrossRef]
- Yuan, W.Y.; Xin, W.P.; Su, C.G.; Cheng, C.; Yan, D.; Wu, Z. Cross-regional Integrated Transmission of Wind Power and Pumped-Storage Hydropower Considering the Peak Shaving Demands of Multiple Power Grids. Renew. Energy 2022, 190, 1112–1126. [Google Scholar] [CrossRef]
- Hu, Z.J.; Zhang, M.L.; Wang, X.F.; Li, C.; Hu, M.Y. Bi-level Robust Dynamic Economic Emission Dispatch Considering Wind Power Uncertainty. Electr. Power Syst. Res. 2016, 135, 35–47. [Google Scholar] [CrossRef]
- Bentsen, L.; Warakagoda, N.D.; Stenbro, R.; Engelstad, P. Relative Evaluation of Probabilistic Methods for Spatio-Temporal Wind Forecasting. J. Clean. Prod. 2024, 434, 139944. [Google Scholar] [CrossRef]
- Tang, C.H.; Xu, J.; Tan, Y.S.; Sun, Y.Z.; Zhang, B.S. Lagrangian Relaxation with Incremental Proximal Method for Economic Dispatch with Large Numbers of Wind Power Scenarios. IEEE Trans. Power Syst. 2019, 11, 436–447. [Google Scholar] [CrossRef]
- Xu, X.; Yan, Z.; Shahidehpour, M.; Li, Z.; Yan, M.; Kong, X. Data-Driven Risk-Averse Two-Stage Optimal Stochastic Scheduling of Energy and Reserve with Correlated Wind Power. IEEE Trans. Sustain. Energy 2020, 27, 206–215. [Google Scholar] [CrossRef]
- Wu, C.Y.; Wei, G.; Zhou, S.Y.; Chen, X.G. Coordinated Optimal Power Flow for Integrated Active Distribution Network and Virtual Power Plants Using Decentralized Algorithm. IEEE Trans. Power Syst. 2021, 36, 3541–3551. [Google Scholar] [CrossRef]
- Ran, X.H.; Zhang, J.H.; Zhu, W.J.; Liu, K.P.; Liu, Y.S. A Model of Correlated Interval–Probabilistic Conditional Value-at-Risk and Optimal Dispatch with Spatial Correlation of Multiple Wind Power Generations. Int. J. Electr. Power Energy Syst. 2024, 155, 109500. [Google Scholar] [CrossRef]
- Wang, Z.N.; Fang, G.H.; Wen, X.; Tan, Q.F.; Zhang, P.; Liu, Z.H. Coordinated Operation of Conventional Hydropower Plants as Hybrid Pumped Storage Hydropower with Wind and Photovoltaic Plants. Energy Convers. Manag. 2023, 277, 116654. [Google Scholar] [CrossRef]
- Soyster, A.L. Convex Programming and Set-Inclusion Constraints and Applications to Inexact Linear Programming. Oper. Res. 1973, 21, 1154–1157. [Google Scholar] [CrossRef]
- Ahmed, S.; Sahinididis, N.V. Robust Process Planning under Uncertainty. Ind. Eng. Chem. Res. 1998, 37, 1883–1892. [Google Scholar] [CrossRef]
- Jin, Y.C.; Branke, J. Evolutionary Optimization in Uncertain Environments-A Survey. IEEE Trans. Evol. Comput. 2005, 9, 303–317. [Google Scholar] [CrossRef]
- Zhao, C.Y.; Wang, J.H.; Watson, J.P.; Guan, Y.P. Multi-Stage Robust Unit Commitment Considering Wind and Demand Response Uncertainties. IEEE Trans. Power Syst. 2013, 28, 2708–2717. [Google Scholar] [CrossRef]
- Xiong, H.B.; Shi, Y.H.; Chen, Z.; Guo, C.X.; Ding, Y. Multi-Stage Robust Dynamic Unit Commitment Based on Pre-Extended—Fast Robust Dual Dynamic Programming. IEEE Trans. Power Syst. 2023, 38, 2411–2422. [Google Scholar] [CrossRef]
- Wu, W.C.; Chen, J.H.; Zhang, B.M.; Sun, H.B. A Robust Wind Power Optimization Method for Look-Ahead Power Dispatch. IEEE Trans. Sustain. Energy 2014, 5, 507–515. [Google Scholar] [CrossRef]
- Zhang, R.F.; Chen, Y.; Li, B.X.; Jiang, T.; Li, X.; Chen, H.H.; Ning, R.X. Adjustable Robust Interval Economic Dispatch of Integrated Electricity and District Heating Systems under Wind Power Uncertainty. Energy Rep. 2022, 8, 13138–13149. [Google Scholar] [CrossRef]
- Xu, M.; Li, W.W.; Feng, Z.H.; Bai, W.W.; Jia, L.L.; Wei, Z.H. Economic Dispatch Model of High Proportional New Energy Grid-Connected Consumption Considering Source Load Uncertainty. Energies 2023, 16, 1696. [Google Scholar] [CrossRef]
- Gunawan, S.; Azarm, S. Multi-objective Robust Optimization Using A Sensitivity Region Concept. Struct. Multidiscip. Optim. 2005, 29, 50–60. [Google Scholar] [CrossRef]
- Lu, Z.; Zhao, H.; Xiao, H.F.; Wang, H.R.; Wang, H.J. An Improved Multi-Objective Bacteria Colony Chemotaxis Algorithm and Convergence Analysis. Appl. Soft Comput. 2015, 31, 274–292. [Google Scholar] [CrossRef]
- Lu, Z.; Feng, T.; Li, X.P. Low-carbon Emission/Economic Power Dispatch Using the Multi-Objective Bacterial Colony Chemotaxis Optimization Algorithm Considering Carbon Capture Power Plant. Int. J. Electr. Power Energy Syst. 2013, 53, 106–112. [Google Scholar] [CrossRef]
- Basu, M. A Nondominated Sorting Genetic Algorithm III with Three Crossover Strategies for the Combined Heat and Power Dynamic Economic Emission Dispatch with or without Prohibited Operating Zones. Eng. Appl. Artif. Intell. 2023, 123, 106443. [Google Scholar]
- Zhang, Q.; Ding, J.J.; Shen, W.X.; Ma, J.H.; Li, G.L. Multiobjective Particle Swarm Optimization for Microgrids Pareto Optimization Dispatch. Math. Probl. Eng. 2020, 2020, 5695917. [Google Scholar] [CrossRef]
- Abido, M.A. A Niched Pareto Genetic Algorithm for Multiobjective Environmental/Economic Dispatch. Int. J. Electr. Power Energy Syst. 2003, 25, 97–105. [Google Scholar] [CrossRef]
- Jiang, S.Y.; Yang, S.X. A Strength Pareto Evolutionary Algorithm Based on Reference Direction for Multiobjective and Many-Objective Optimization. IEEE Trans. Evol. Comput. 2017, 21, 329–346. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated Power/MW | Pmax/MW | Pmin/MW | ai | bi | ci |
|---|---|---|---|---|---|
| 540 | 540 | 270 | 0.00037 | 18.315 | 807.11 |
| 315 | 315 | 157.5 | 0.00051 | 17.435 | 843.80 |
| 297 | 297 | 148.5 | 0.00053 | 19.241 | 710.68 |
| 270 | 270 | 135 | 0.00063 | 22.789 | 521.00 |
| 180 | 180 | 90 | 0.00066 | 22.181 | 634.71 |
| OIRI (max) | f/104 USD | OIRI | f(min)/104 USD | |
|---|---|---|---|---|
| Scenario 1 | 17.48% | 247.82 | 0.018% | 164.09 |
| Scenario 2 | 20.01% | 232.59 | 0.027% | 147.20 |
| Classification | Conventional Method | Scenario 1 | Scenario 2 | ||
|---|---|---|---|---|---|
| OIRI | WCSR | OIRI | WCSR | ||
| the total cost/104 USD | 276.41 | 225.60 | 229.04 | 192.11 | 203.91 |
| coal consumption cost/104 USD | 233.15 | 193.74 | 220.62 | 185.94 | 197.45 |
| wind power penalty cost/104 USD | 31.94 | 0 | 5.04 | 0 | 0 |
| pumped storage start–stop cost/104 USD | 11.32 | 2.9 | 2.9 | 5.76 | 5.76 |
| pumped storage penalty cost/104 USD | 0 | 0.29 | 0.48 | 0.41 | 0.69 |
| wind curtailment/MWh | 4487.16 | 0 | 708.45 | 0 | 0 |
| CPU time (s) | 153.1 | 219.9 | 253.9 | 228.4 | 261.7 |
| Proposed Method | NSGA | MOPSO | NPGA | SPEA | |
|---|---|---|---|---|---|
| the total cost/104 USD | 309.21 | 352.62 | 316.19 | 316.42 | 315.81 |
| coal consumption cost/104 USD | 299.28 | 319.24 | 306.03 | 306.21 | 306.61 |
| wind power penalty cost/104 USD | 0 | 0 | 0 | 0 | 0 |
| pumped storage start–stop cost/104 USD | 9.27 | 31.92 | 8.97 | 8.95 | 8.97 |
| pumped storage penalty cost/104 USD | 0.66 | 1.46 | 1.19 | 1.26 | 0.23 |
| wind curtailment/MWh | 0 | 0 | 0 | 0 | 0 |
| CPU time (s) | 542.4 | 549.8 | 590.7 | 560.1 | 571.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, X.; Ji, L.; Xie, H. Bi-Level Inverse Robust Optimization Dispatch of Wind Power and Pumped Storage Hydropower Complementary Systems. Processes 2024, 12, 729. https://doi.org/10.3390/pr12040729
Jing X, Ji L, Xie H. Bi-Level Inverse Robust Optimization Dispatch of Wind Power and Pumped Storage Hydropower Complementary Systems. Processes. 2024; 12(4):729. https://doi.org/10.3390/pr12040729
Chicago/Turabian StyleJing, Xiuyan, Liantao Ji, and Huan Xie. 2024. "Bi-Level Inverse Robust Optimization Dispatch of Wind Power and Pumped Storage Hydropower Complementary Systems" Processes 12, no. 4: 729. https://doi.org/10.3390/pr12040729
APA StyleJing, X., Ji, L., & Xie, H. (2024). Bi-Level Inverse Robust Optimization Dispatch of Wind Power and Pumped Storage Hydropower Complementary Systems. Processes, 12(4), 729. https://doi.org/10.3390/pr12040729