
Two-Step Intelligent Control for a Green Flexible EV Energy Supply Station Oriented to Dual Carbon Targets

Abstract
:1. Introduction
- The 24 h daily control and regulation problem of simultaneously optimizing operation modes and outputs for four subsystems is a mixed-integer programming problem [2], which should solve two issues. One is to determine the operation mode of each subsystem for all 24 h of a day, and the other is to determine the best output of each subsystem.
- The dynamic characteristics of distributed energy sources including photovoltaic, energy storage, charging and battery changes in the EVs’ “Photovoltaic-Storage-Charging-Change” stations are different from each other in terms of time-scale, and are mostly nonlinear and multi-dimensional. This increases the complexity of the optimization control and regulation problem.
- There are coupling and restriction relationships between different subsystems, which also increases their complexity.
- Additional carbon transaction costs and carbon emission constraints also increase the complexity.
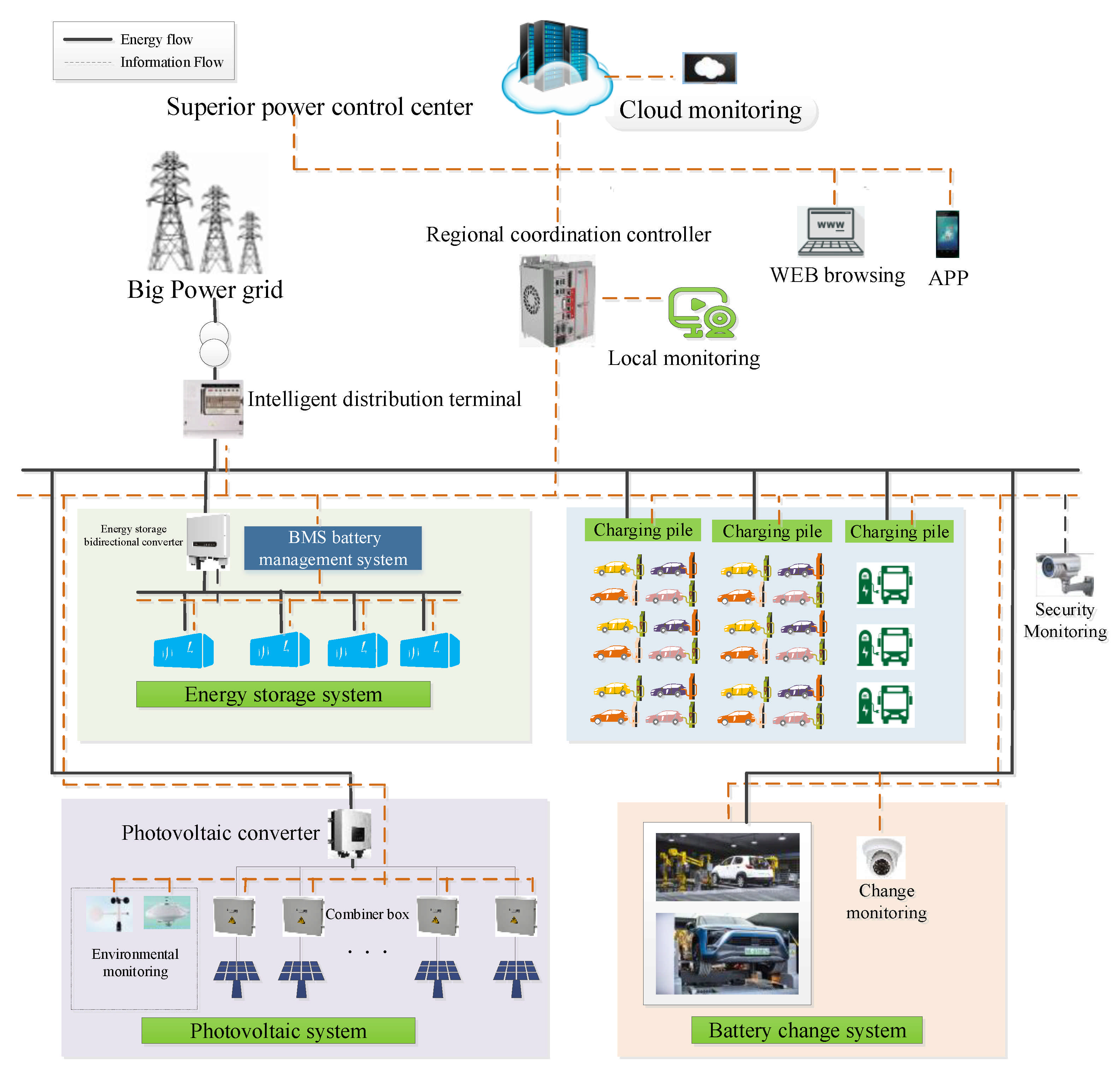
2. “Photovoltaic-Storage-Charging-Change” System Architecture and Control Model Description
2.1. “Photovoltaic-Storage-Charging-Change” System Architecture
2.2. Control Model of “Photovoltaic-Storage-Charging-Change” Integrated System
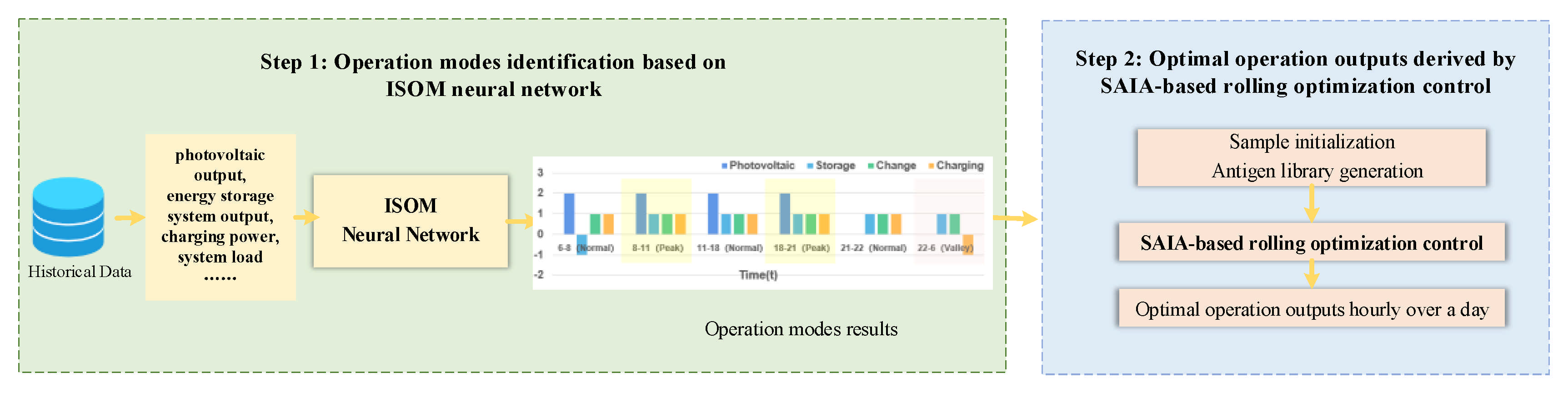
3. Two-Step Intelligent Control of “Photovoltaic-Storage-Charging-Change” System Based on ISOM-SAIA
3.1. Overall Architecture of Two-Step Intelligent Control ISOM-SAIA
3.2. Step 1: Classification of Operation Modes Based on ISOM
3.3. Step 2: SAIA-Based Rolling Optimization Control
- (a)
- Based on the classification results from Step 1 in Section 3.2, the operation modes of four subsystems in each time period of peak, flat, and valley are obtained.
- (b)
- Starting from t = 1, check which special time period t belongs to, and derive the optimal operation output of all subsystems using the SAIA algorithm based on the objective function and constraints given in Formulas (9)–(24). The SAIA optimization calculation process is given from (1) to (8) as follows:
- (c)
- If t < 24 h, t = t + 1; otherwise, the algorithm ends and derives the optimal operation modes of all subsystems in each hour of a day.
4. Simulation Analysis
4.1. Data Source and System Parameters of “Photovoltaic-Storage-Charging-Change” System
4.2. Tests for Two-Step Intelligent Control of “Photovoltaic-Storage-Charging-Change” System
4.2.1. Tests for Step 1: Classification of Daily Operation Modes Based on ISOM Neural Network
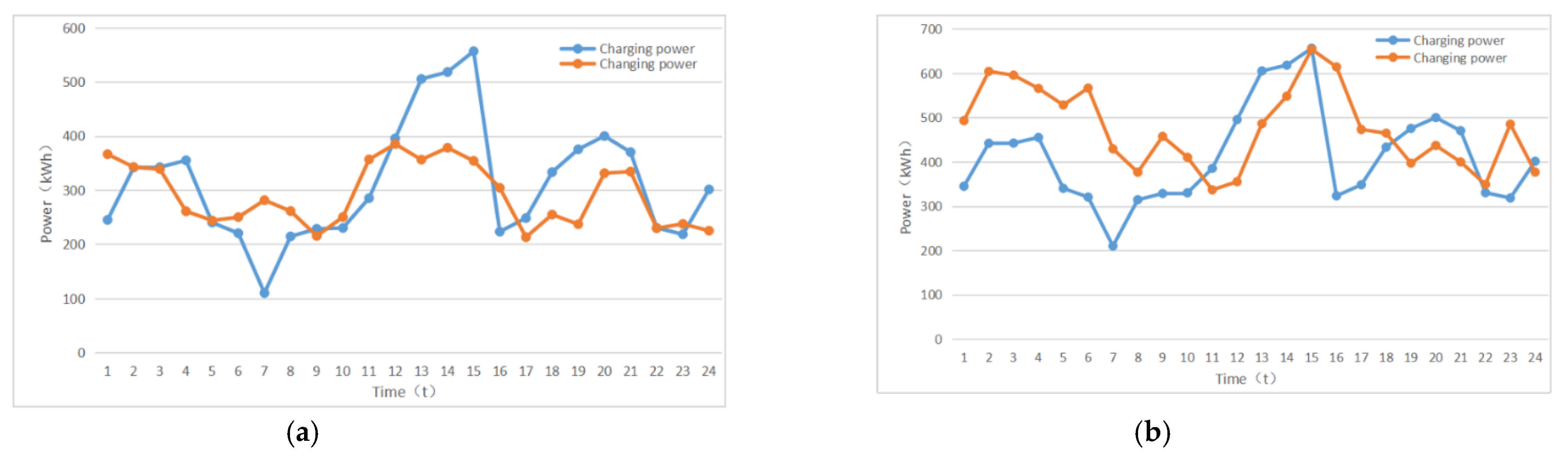
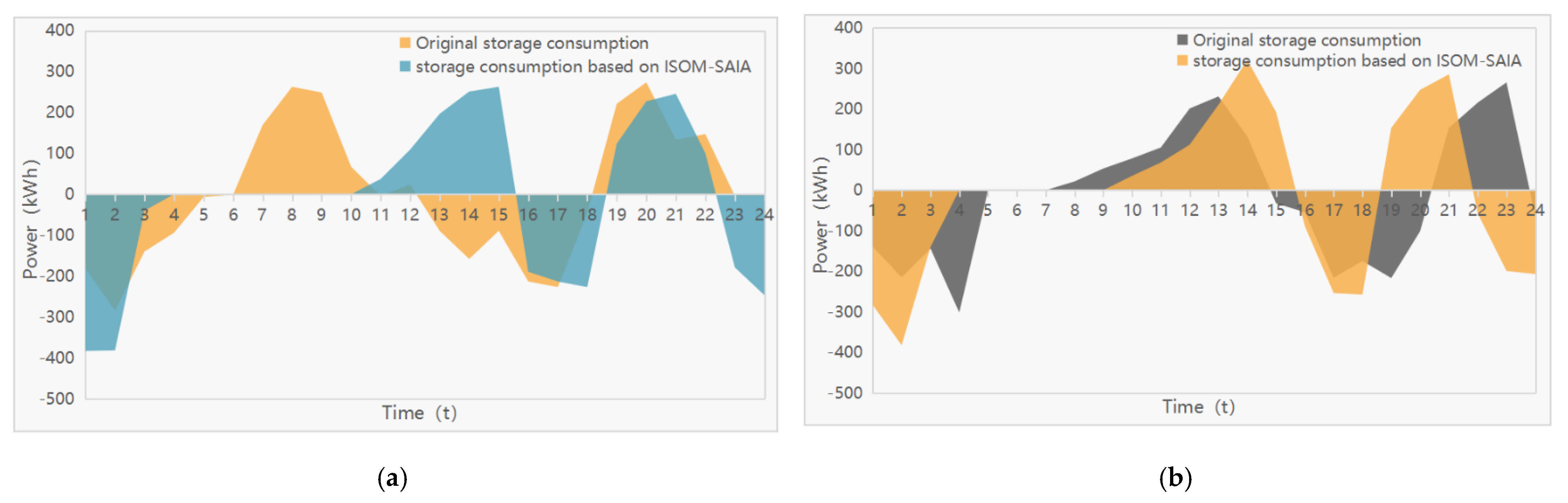
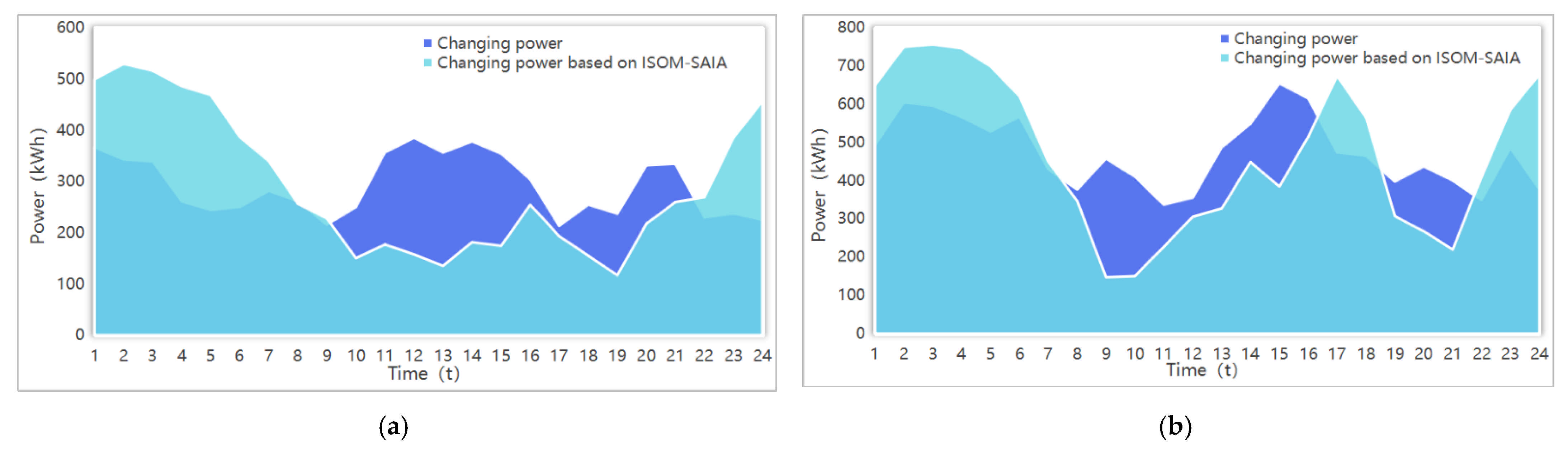
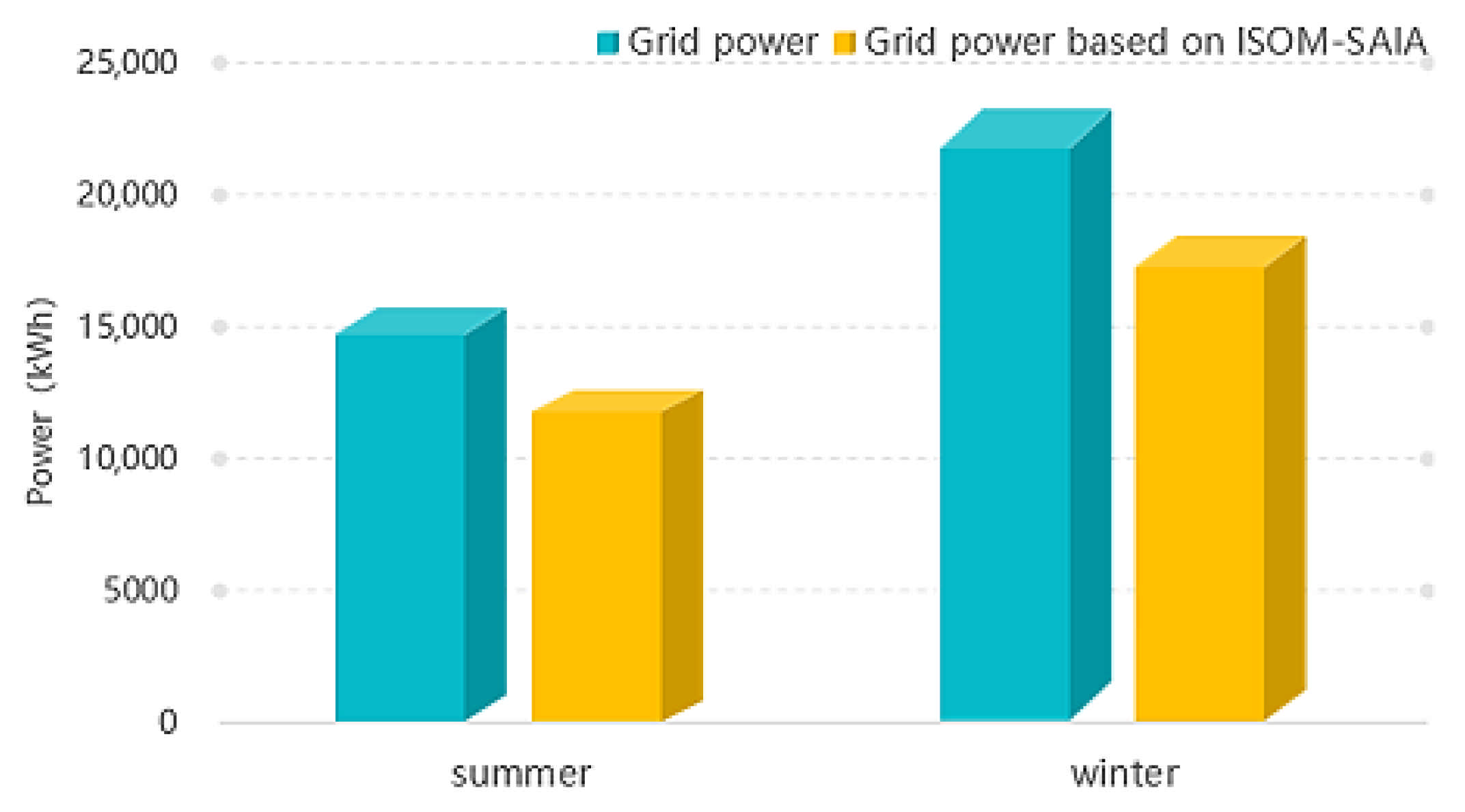
4.2.2. Tests for Step 2: Optimal Daily Operation Outputs by SAIA-Based Rolling Optimization
- A.
- Simulation analysis of power grid peak shaving and valley filling performance
- B.
- Simulation analysis of carbon transaction costs and carbon emission constraints
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- IEA. Global EV Outlook 2021; IEA: Paris, France, 2021; Available online: https://www.iea.org/reports/global-ev-outlook-2021 (accessed on 31 July 2021).
- Xu, L.; Zhang, J.; Bao, Z.; Cao, Y. A comparative study between IPSO and MIP for co-ordinated scheduling of electricity and heat within a microgrid. Trans. Inst. Meas. Control 2013, 35, 444–456. [Google Scholar] [CrossRef]
- Yang, T.; Zhao, L.; Wang, C. Review on application of artificial intelligence in power system and integrated energy system. Autom. Electr. Power Syst. 2019, 43, 2–14. [Google Scholar]
- Jha, M.; Blaabjerg, F.; Khan, M.A.; Bharath Kurukuru, V.S.; Haque, A. Intelligent Control of Converter for Electric Vehicles Charging Station. Energies 2019, 12, 2334. [Google Scholar] [CrossRef] [Green Version]
- Beigvand, S.D.; Abdi, H.; La Scala, M. Combined heat and power economic dispatch problem using gravitational search algorithm. Electr. Power Syst. Res. 2016, 33, 160–172. [Google Scholar] [CrossRef]
- Jiang, X.; Jing, Z.; Li, Y.; Wu, Q.; Tang, W. Modelling and operation optimization of an integrated energy based direct district water-heating system. Energy 2014, 64, 375–388. [Google Scholar] [CrossRef]
- Meng, A.; Mei, P.; Lu, H. Crisscross optimization algorithm for combined heat and power economic dispatch. Power Syst. Prot. Control 2016, 44, 90–97. [Google Scholar]
- Ndiaye, E.H.M.; Ndiaye, A.; Faye, M.; Gueye, S. Intelligent Control of a Photovoltaic Generator for Charging and Discharging Battery Using Adaptive Neuro-Fuzzy Inference System. Int. J. Photoenergy 2020, 2020, 8649868. [Google Scholar] [CrossRef]
- Qu, K.; Zhang, X.; Yu, T.; Han, C.J. Knowledge transfer based Q-learning algorithm for optimal dispatch of multi-energy system. Autom. Electr. Power Syst. 2017, 41, 18–25. [Google Scholar]
- Liu, X. Heterogeneous Multi-Agent Cooperative Control and Its Application in DC Microgrid; Huazhong University of Science and Technology: Wuhan, China, 2019. [Google Scholar]
- Meng, Y.; Cao, Y.; Zeng, J. Design and Implementation of Intelligent Management System for Electric Vehicle Charging Station. Instrum. Technol. 2016, 33, 22–24. [Google Scholar]
- Zhang, Y.; Luo, H.; Wang, Y. Research on Hybrid Energy Storage Power Distribution and Bus Voltage Stabilization of Photovoltaic DC Microgrid Based on Fuzzy-Sag Control. Electr. Meas. Instrum. 2020, 1–9. Available online: http://kns.cnki.net/kcms/detail/23.1202.TH.20200806.1637.014.html (accessed on 26 March 2021).
- Qu, F.; Zhao, J.; Cai, Z.; Hu, C.; Dai, S.; Sun, Q. Cooperative optimization control strategy of electric vehicle and temperature-controlled load virtual power plant. J. Electr. Power Syst. Autom. 2021, 33, 48–56. [Google Scholar]
- Tang, M.; Qu, X.; Yao, R.; Zhang, Y.; Chen, W.; Jia, K. Multi-photovoltaic Coordinated Control Strategy in DC Distribution Network Based on Discrete Consensus Algorithm. Autom. Electr. Power Syst. 2020, 44, 89–95. [Google Scholar]
- Blasius, E.; Federau, E.; Janik, P.; Leonowicz, Z. Heuristic Storage System Sizing for Optimal Operation of Electric Vehicles Powered by Photovoltaic Charging Station. Int. J. Photoenergy 2016, 2016, 3980284. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Li, L.; Fu, Y. Stability Analysis and Regional Cooperative Control of Controllable Inertia Optical Storage Interconnection System. High Volt. Technol. 2021, 47, 1694–1705. [Google Scholar]
- Jiang, Y. Simulation of electric vehicle charging load cooperative control based on microgrid. Comput. Simul. 2020, 37, 87–90. [Google Scholar]
- Ramadhani, U.H.; Shepero, M.; Munkhammar, J.; Widén, J.; Etherden, N. Review of probabilistic load flow approaches for power distribution systems with photovoltaic generation and electric vehicle charging. Int. J. Electr. Power Energy Syst. 2020, 120, 106003. [Google Scholar] [CrossRef]
- Shimazu, T.; Takahashi, A.; Shimofuji, K.; Funabiki, S.; Nagata, T. Reactive power control of power conditioning systems to avoid voltage deviation in high-voltage distribution systems caused by both of photovoltaic generation and electric vehicle charging. Electr. Eng. Jpn. 2018, 138, 416–422. [Google Scholar]
- Meng, C.; Jiang, Y.; Dai, J. Study on the scheduled performance control of a class of nonlinear multi-agent systems. J. Nanchang Hangkong Univ. 2019, 33, 1–6. [Google Scholar]
- Xu, S.; Yan, Z.; Feng, D.; Zhang, L. Electric vehicle charging collaborative control strategy based on multi-agent. Electr. Power Autom. Equip. 2014, 34, 7–13. [Google Scholar]
- Hao, R.; Ai, Q.; Zhu, Y. Energy Internet collaborative optimization control based on multi-agent consistency. Autom. Electr. Power Syst. 2017, 41, 10–17. [Google Scholar]
- Zhou, Y.; Wang, K.; Li, G.; Han, B.; Liu, Z. Distributed hierarchical control strategy of microgrid based on multi-agent consensus algorithm. Autom. Electr. Power Syst. 2017, 41, 142–149. [Google Scholar]
- Mesbahi, T.; Bartholomeüs, P.; Rizoug, N.; Sadoun, R.; Khenfri, F.; Le Moigne, P. Advanced Model of Hybrid Energy Storage System Integrating Lithium-Ion Battery and Supercapacitor for Electric Vehicle Applications. IEEE Trans. Ind. Electron. 2021, 68, 3962–3972. [Google Scholar] [CrossRef]
- Shin, M.; Choi, D.; Kim, J. Cooperative Management for PV/ESS-Enabled Electric Vehicle Charging Stations: A Multiagent Deep Reinforcement Learning Approach. IEEE Trans. Ind. Inform. 2020, 16, 3493–3503. [Google Scholar] [CrossRef]
- Vavilapalli, S.; Padmanaban, S.; Subramaniam, U.; Mihet-Popa, L. Power Balancing Control for Grid Energy Storage System in Photovoltaic Applications-Real Time Digital Simulation Implementation. Energies 2017, 10, 928. [Google Scholar] [CrossRef] [Green Version]
- Kohonen, T. Self-organized formation of topologically correct feature maps. Biol. Cybern. 1982, 43, 59–69. [Google Scholar] [CrossRef]
- Musharavati, F.; Hamouda, A.S.M. Enhanced simulated-annealing-based algorithms and their applications to process planning in reconfigurable manufacturing systems. Adv. Eng. Softw. 2012, 45, 80–90. [Google Scholar] [CrossRef]
- Trung, N.T.; Anh, D.T. Comparing Three Improved Variants of Simulated Annealing for Optimizing Dorm Room Assignments. In Proceedings of the IEEE-RIVF International Conference on Computing and Communication Technologies, Danang, Vietnam, 13–17 July 2009. [Google Scholar]
- Zhang, Y.; Liu, C. An Improved Evolution Algorithm of Immune Detectors for Network Data Analysis. In Proceedings of the International Conference on Intelligent Computing and Human-Computer Interaction (ICHCI), Sanya, China, 4–6 December 2020. [Google Scholar]
- Jiang, J.; Song, C.; Ping, H.; Zhang, C. Convergence Analysis of Self-adaptive Immune Particle Swarm Optimization Algorithm. In Proceedings of the 15th International Symposium on Neural Networks (ISNN), Minsk, Belarus, 25–28 June 2018. [Google Scholar]
- Shi, J.; Su, Y.D.; Xie, M. Research on Application of IGA (Immune Genetic Algorithm) to the Solution of Course-Timetabling Problem. In Proceedings of the 4th International Conference on Computer Science and Education, Nanning, China, 25–28 July 2009. [Google Scholar]
- Yang, Y. Research on Control Strategy of Power Electronic Transformer with Access of Photovoltaic-Storage System and Charging Station; North China Electric Power University: Beijing, China, 2020. [Google Scholar]
- Ni, C.; Liu, X. Battery Capacity Optimal Configuration and Economical Analysis of Energy Storage Photovoltaic System. Zhejiang Electr. Power 2019, 38, 1–10. [Google Scholar]
- Chen, T.; Xu, X.; Yan, Z.; Zhu, Y. Optimal operation based on deep reinforcement learning for energy storage system in photovoltaic-storage charging station. Electric Power Autom. Equip. 2021, 41, 1–9. [Google Scholar]
- Shang, Z.; Wang, G. Research on Day-ahead Optimal Economic Dispatching Strategy for Micro-energy-grid and Analysis of Electric Energy Storage Strategy. Electr. Power Sci. Eng. 2020, 36, 9–16. [Google Scholar]
- Tang, W.; Zhang, Y.; Xuan, D.; Jiang, D. Low-carbon Park Economic Operation Scheduling Strategy Taking into Account the Tiered Carbon Trading Mechanism. Distrib. Util. 2021, 38, 10–18. [Google Scholar]
- Mei, G.; Gong, J.; Zhang, Y. Scheduling Strategy for Multi-energy Complementary Virtual Power Plant Considering the Correlation Between Wind and Solar Output and Carbon Emission Quota. Proc. CSU-EPSA 2021, 33, 62–69. [Google Scholar]
- Hananeh, F.; Alireza, Z.; Shahram, J. The role of demand response in single and multi-objective wind-thermal generation scheduling: A stochastic programming. Energy 2014, 64, 853–867. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Installed Capacity (kWh) | Power Generation Cost (Yuan kWh) | Maintenance Cost (Yuan kWh) |
|---|---|---|---|
| Photovoltaic | 10 | 0.41 | 0.0401 |
| Energy Storage | 1000 | 0.68 | 0.0843 |
| Charging System | 4000 | 0.56 | 0.0512 |
| Battery Changing System | 2340 | 0.68 | 0.0753 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, S.; Fang, C.; Wang, H.; Li, J.; Li, Y.; Peng, D.; Zhao, H. Two-Step Intelligent Control for a Green Flexible EV Energy Supply Station Oriented to Dual Carbon Targets. Processes 2021, 9, 1918. https://doi.org/10.3390/pr9111918
Shi S, Fang C, Wang H, Li J, Li Y, Peng D, Zhao H. Two-Step Intelligent Control for a Green Flexible EV Energy Supply Station Oriented to Dual Carbon Targets. Processes. 2021; 9(11):1918. https://doi.org/10.3390/pr9111918
Chicago/Turabian StyleShi, Shanshan, Chen Fang, Haojing Wang, Jianfang Li, Yuekai Li, Daogang Peng, and Huirong Zhao. 2021. "Two-Step Intelligent Control for a Green Flexible EV Energy Supply Station Oriented to Dual Carbon Targets" Processes 9, no. 11: 1918. https://doi.org/10.3390/pr9111918