

Riemann–Hilbert Method Equipped with Mixed Spectrum for N-Soliton Solutions of New Three-Component Coupled Time-Varying Coefficient Complex mKdV Equations


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Lax Pair and the Relevant RH Problem
3. Solvability of Relevant RH Problem and Time-Dependences of Scattering Data
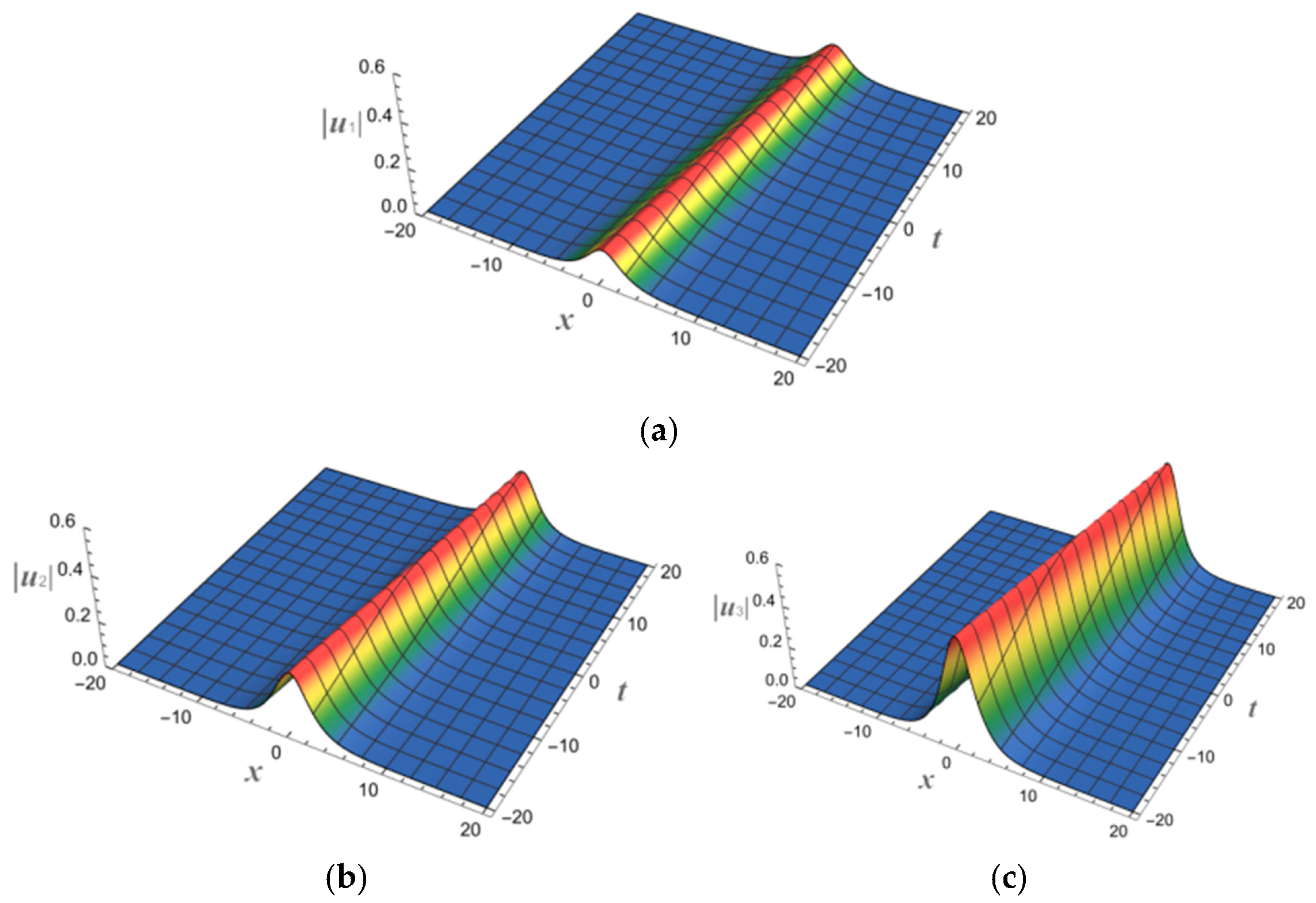
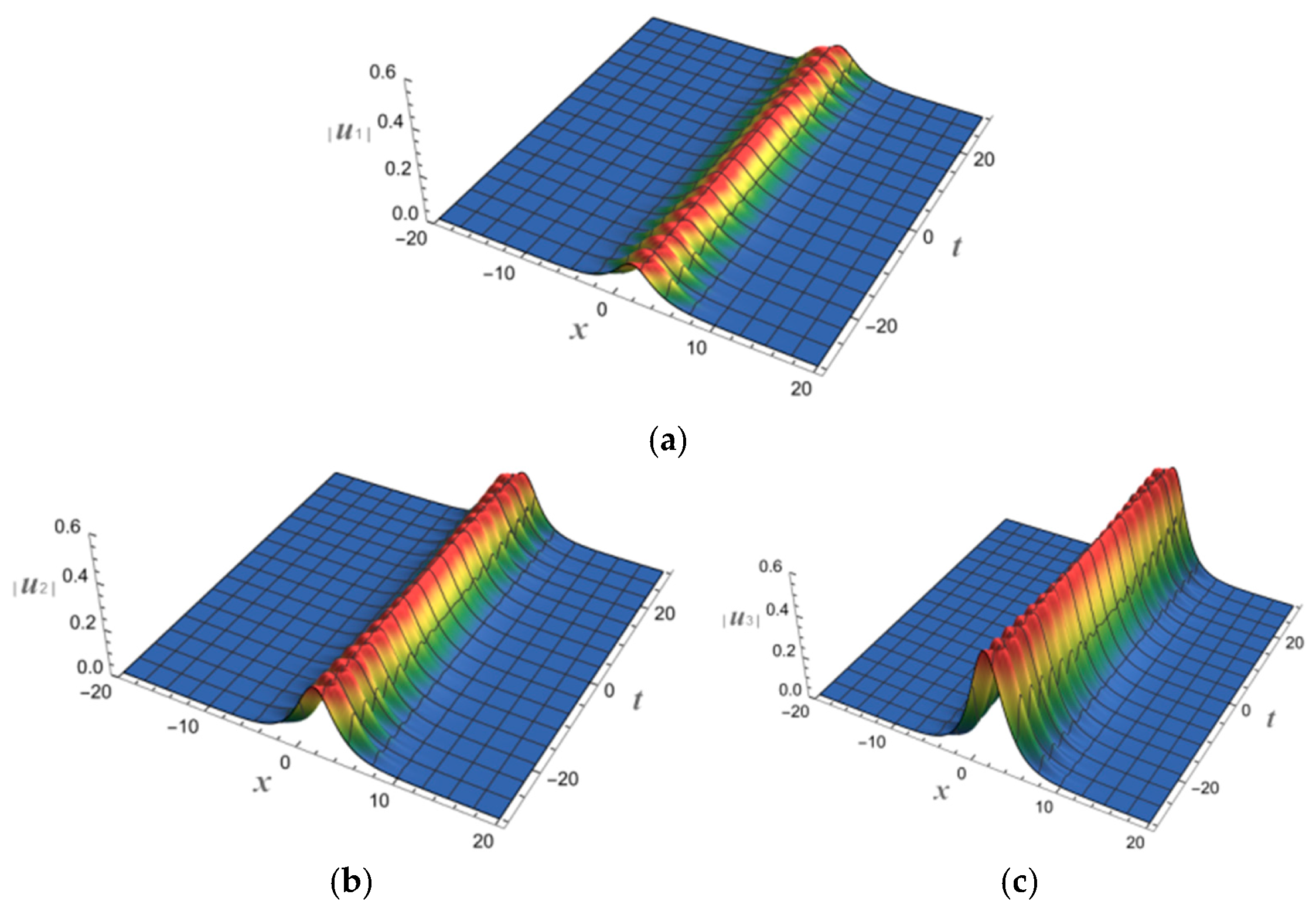
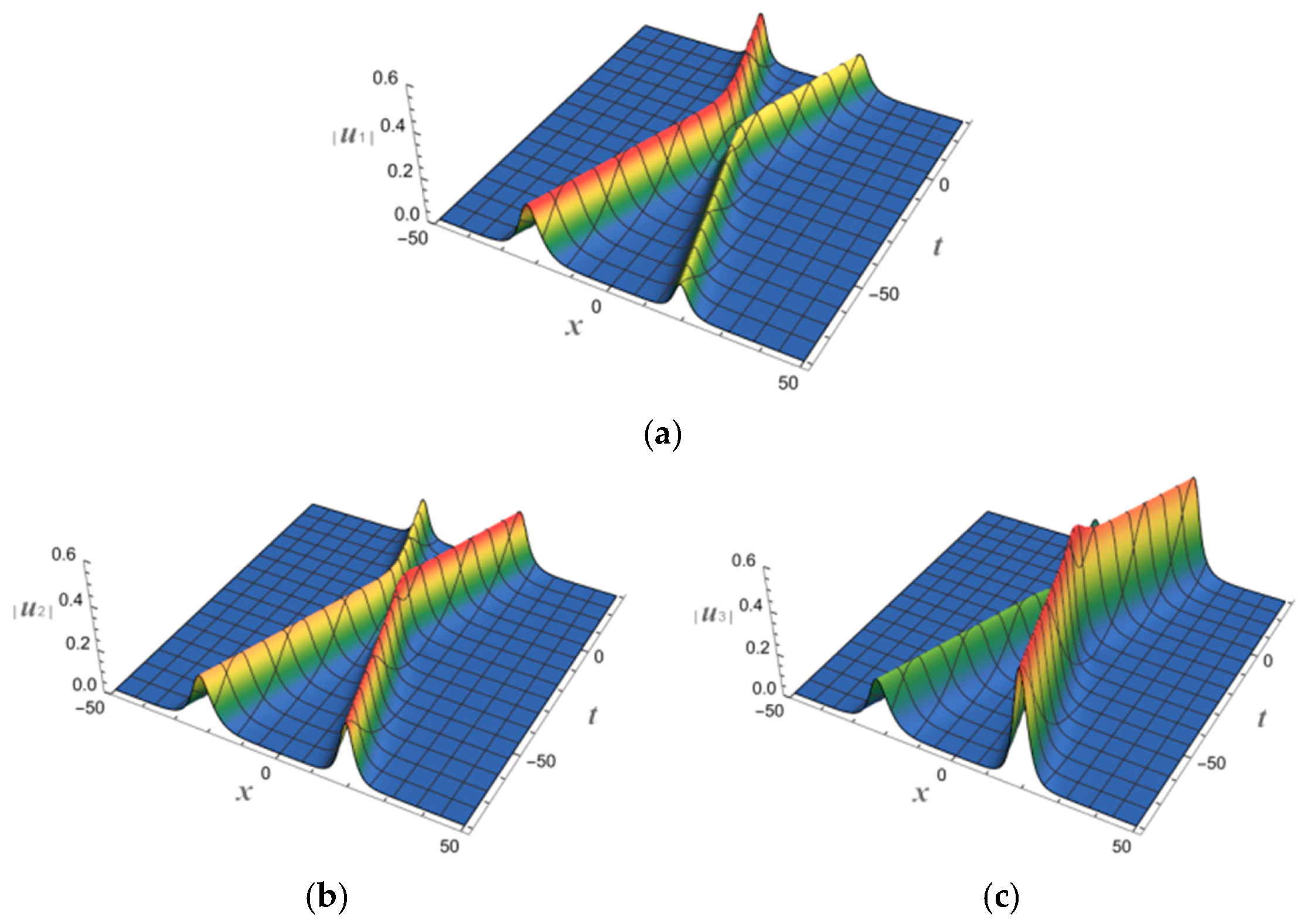
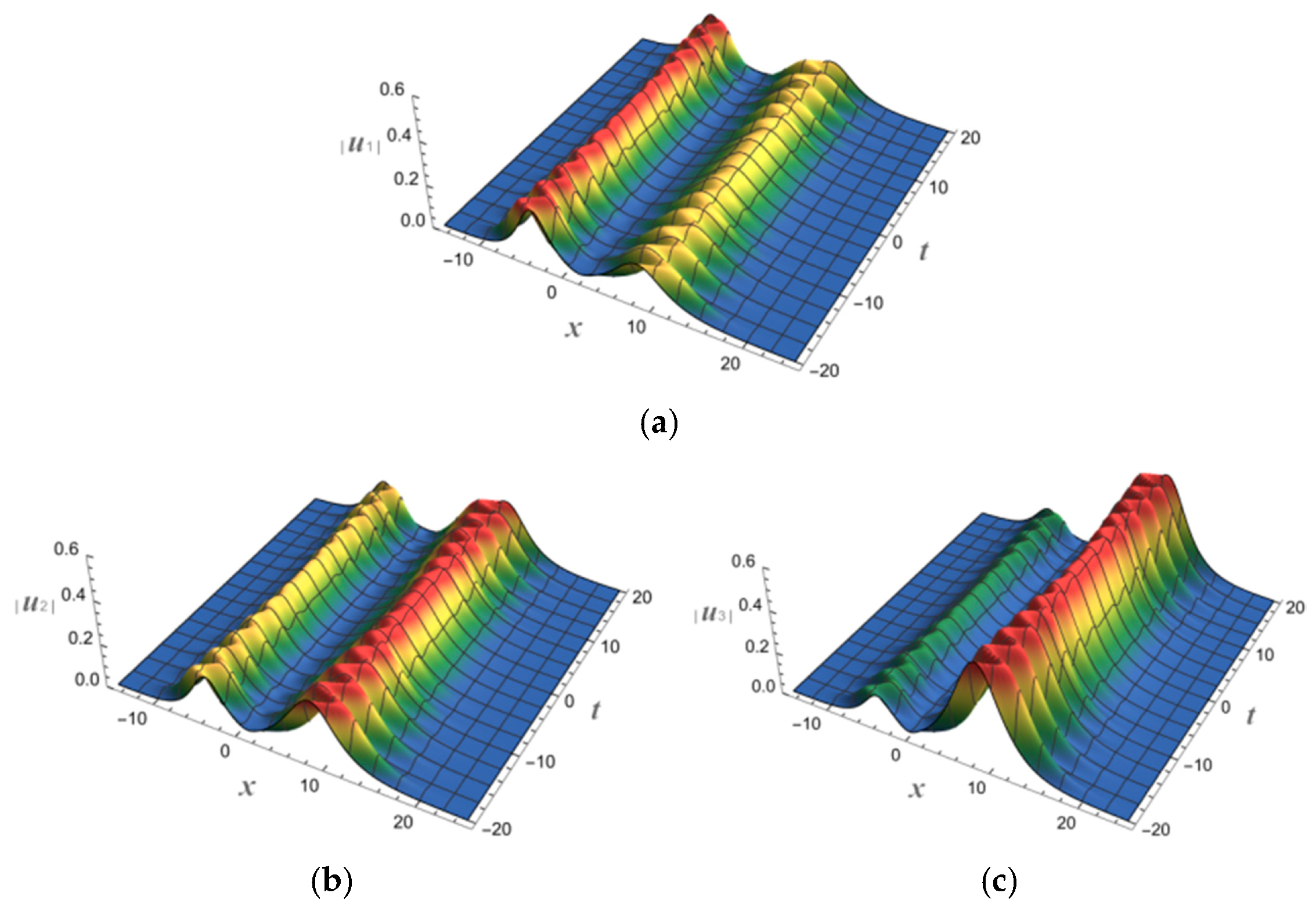
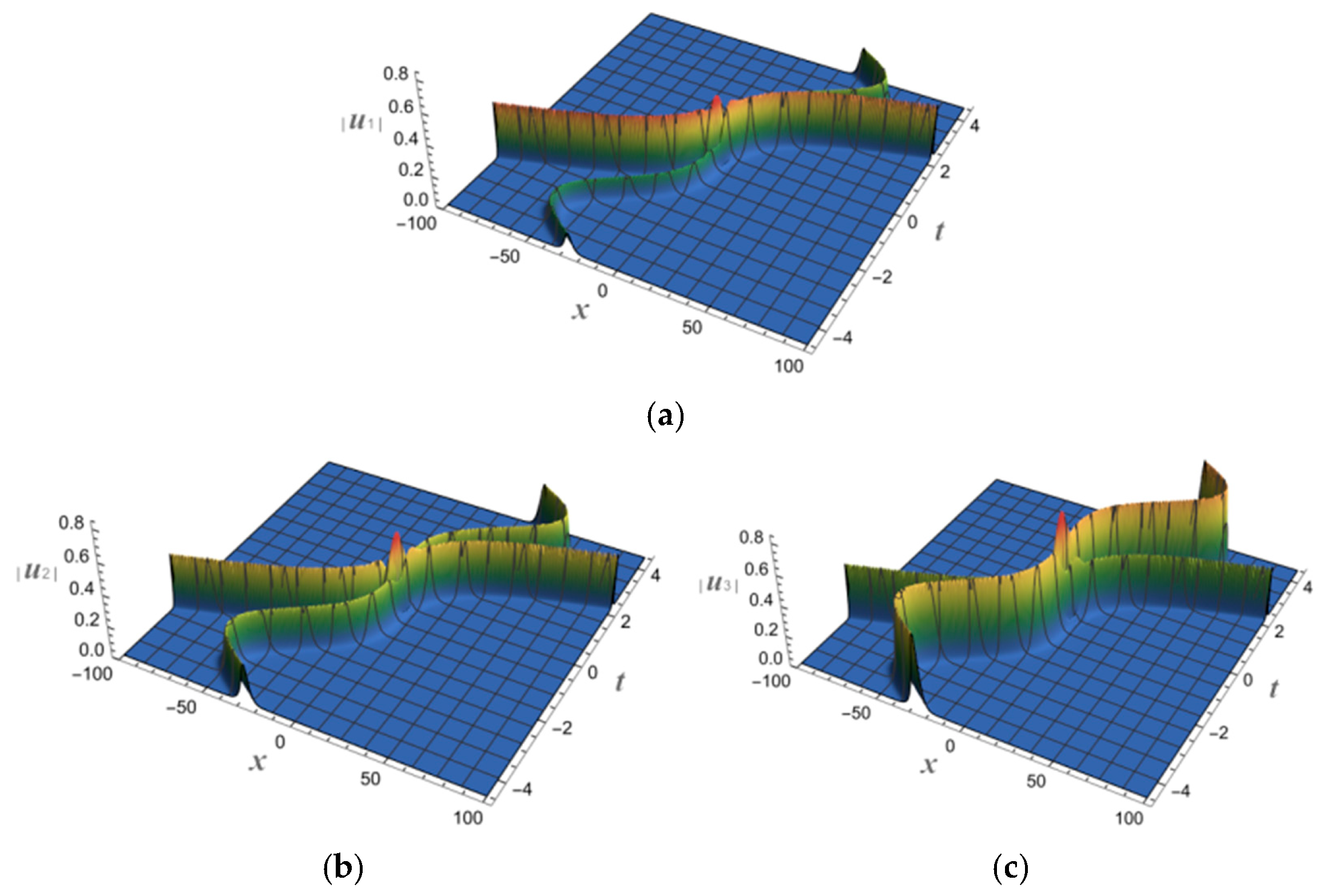
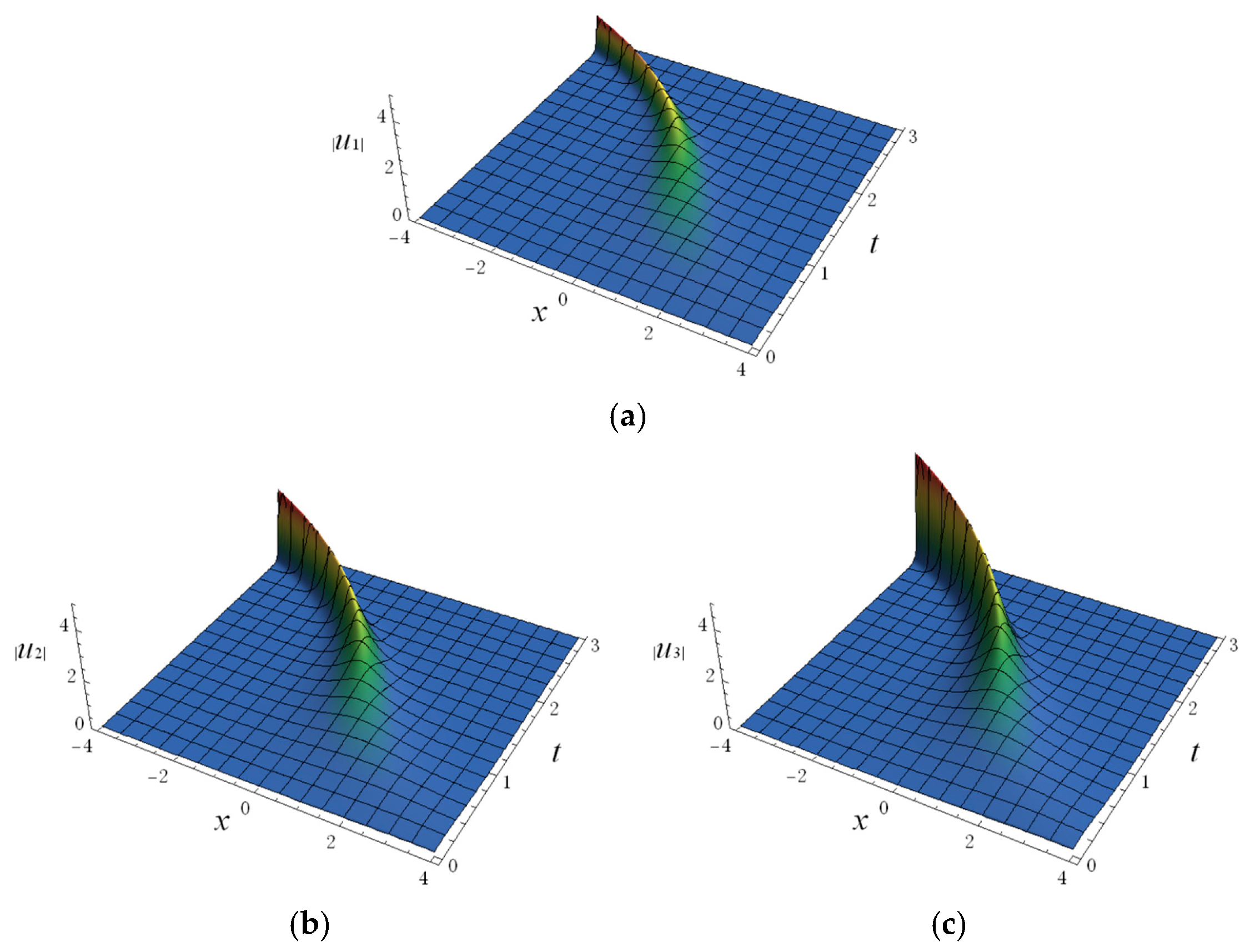
4. N-Soliton Solutions and Their Spatial Structures
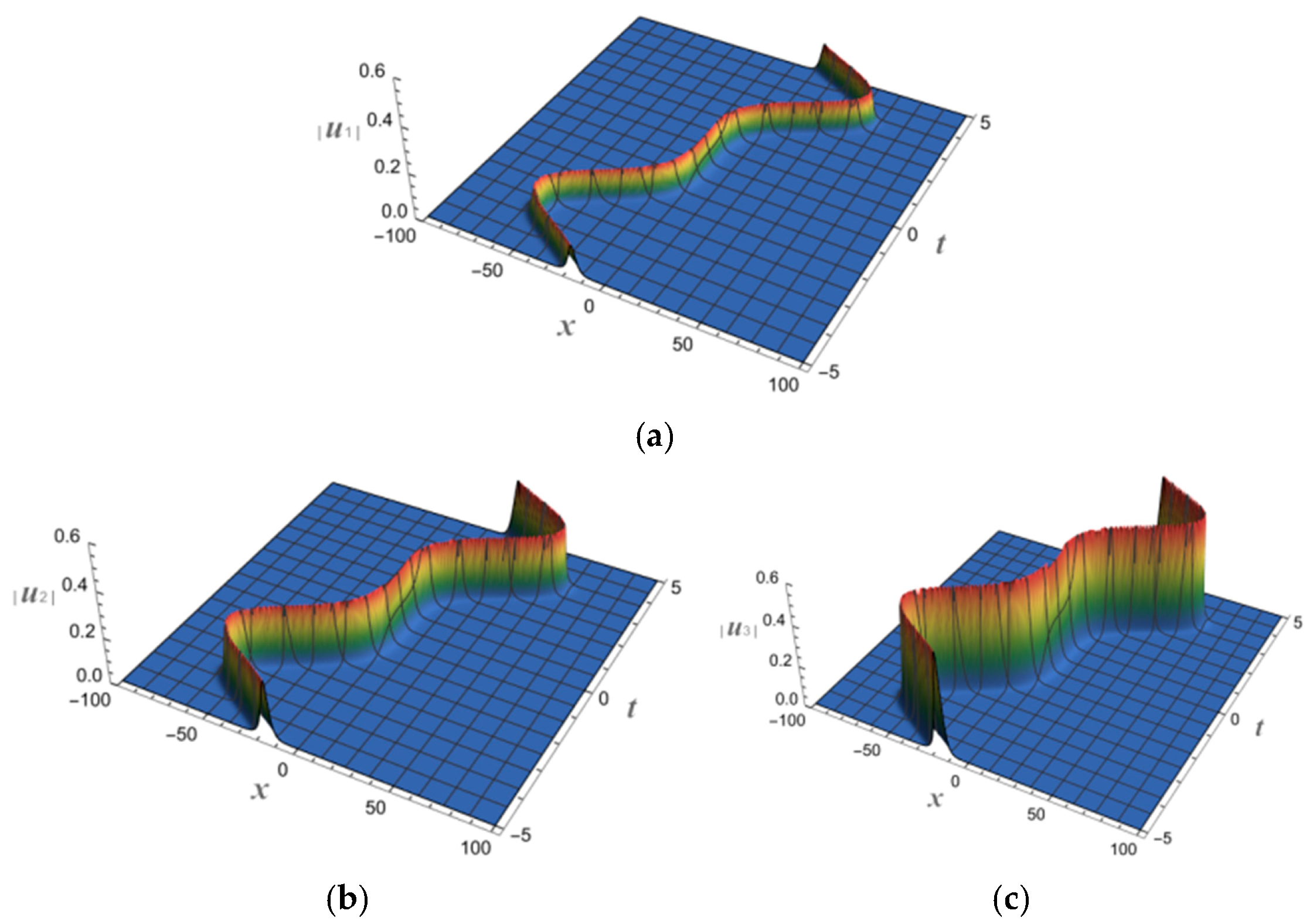
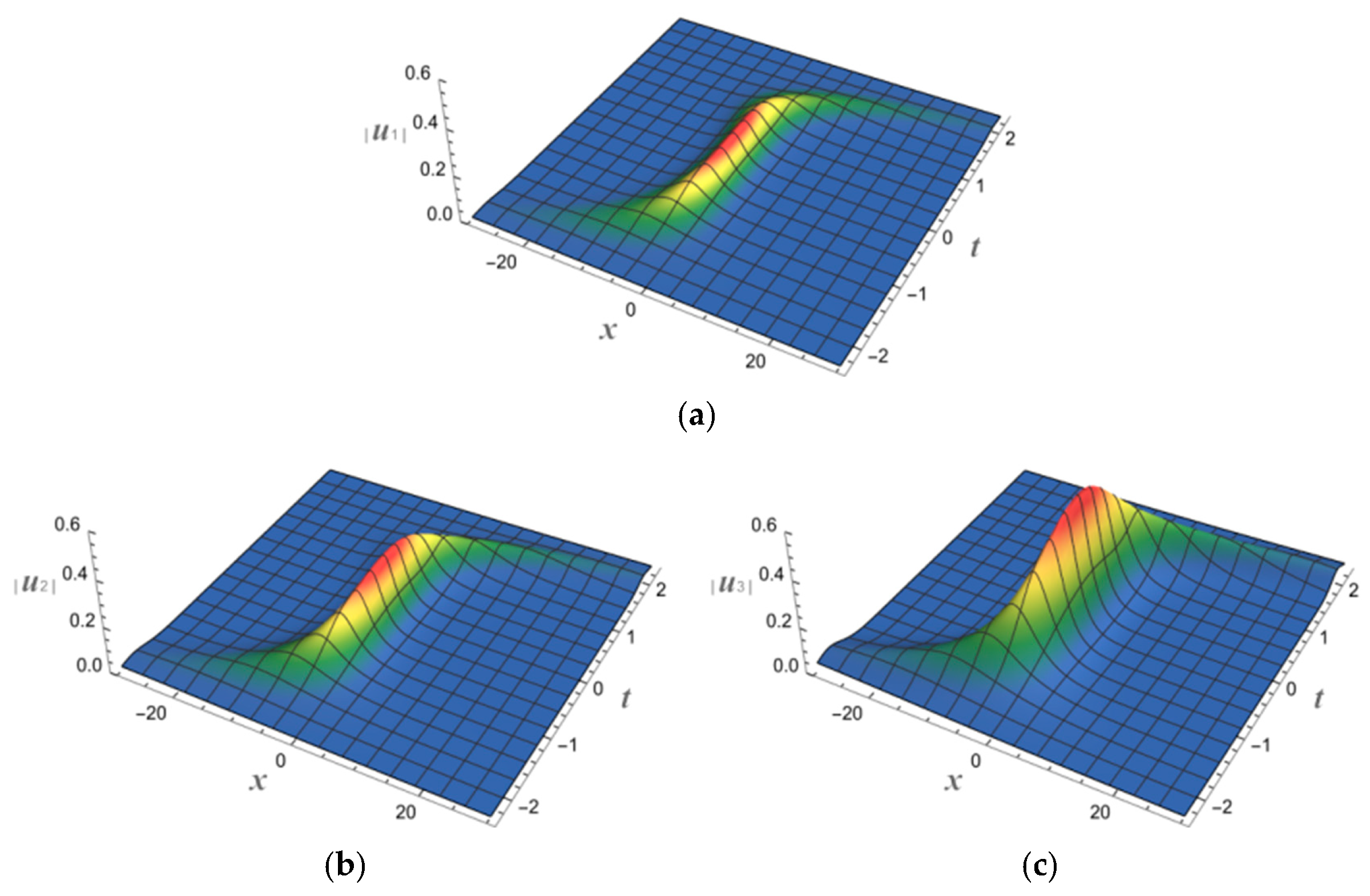
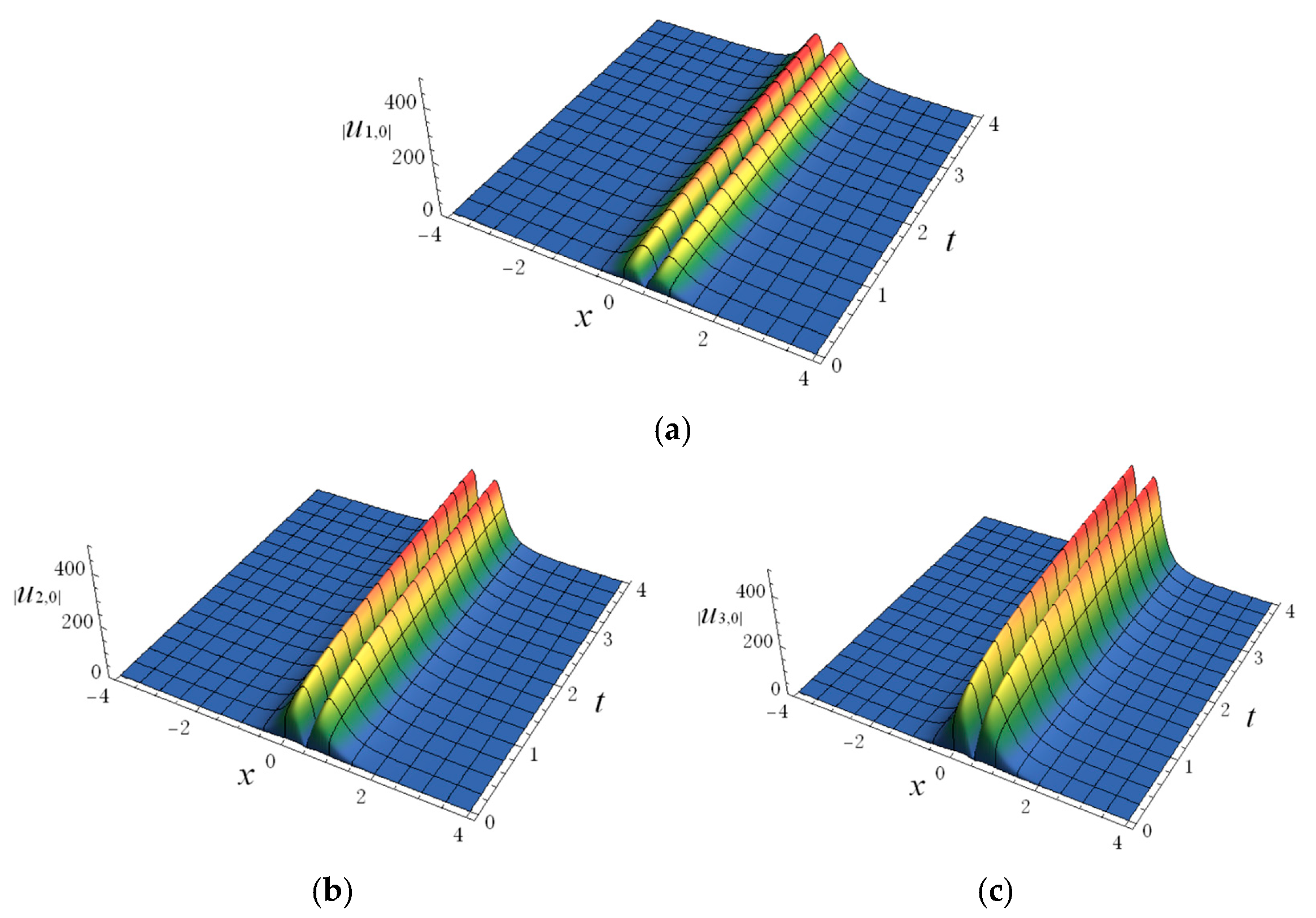
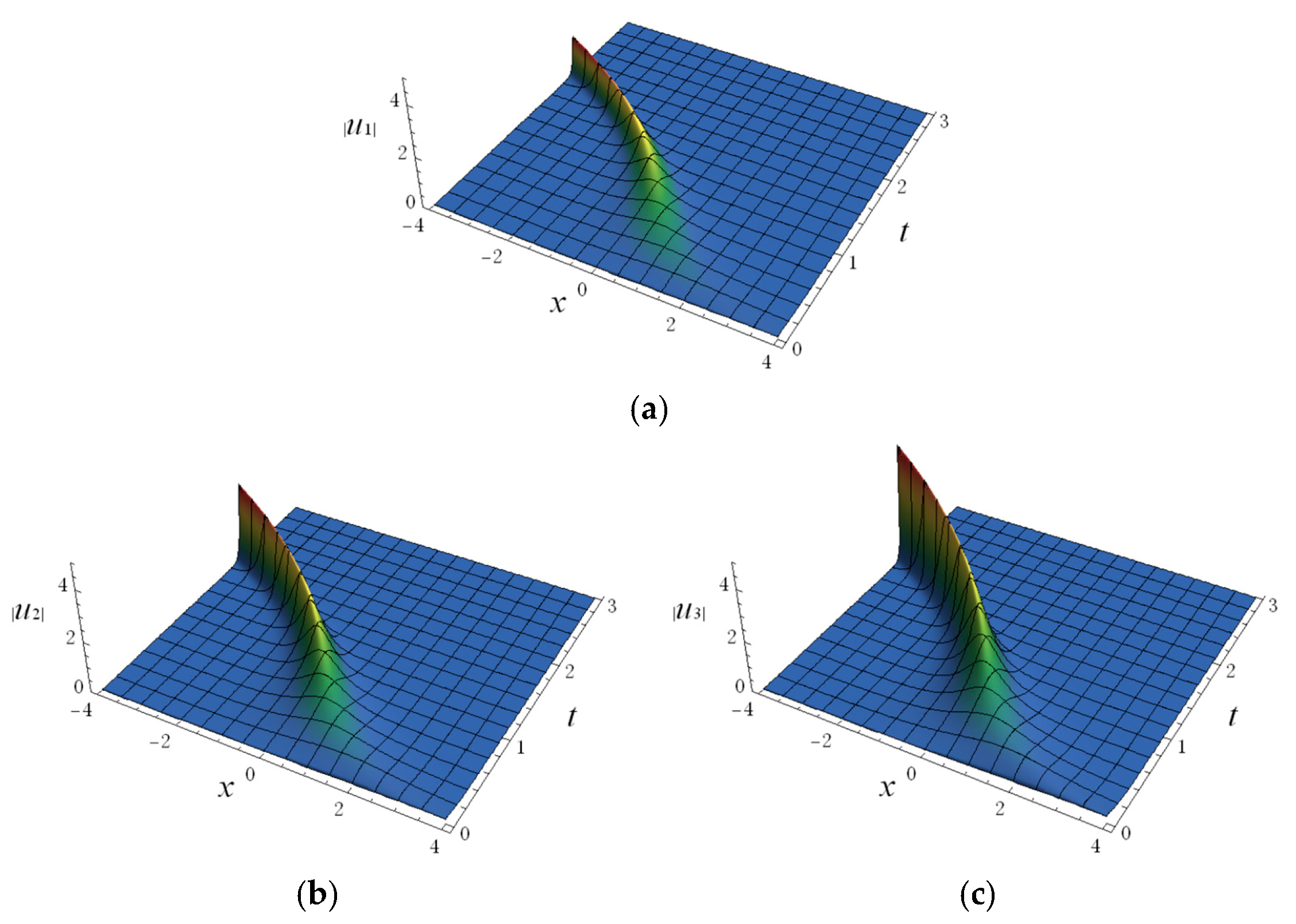
5. Application to Fractional Order System
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, J.K. Nonlinear Waves in Integrable and Nonintegrable Systems; SIAM: Philadelphia, PA, USA, 2010; pp. 16–36. [Google Scholar]
- Biondini, G.; Kovaci, G. Inverse scattering transform for the focusing nonlinear Schrödinger equation with nonzero boundary conditions. J. Math. Phys. 2014, 55, 031506. [Google Scholar] [CrossRef]
- Xu, J.; Fan, E.G. A Riemann–Hilbert approach to the initial-boundary problem for derivative nonlinear Schrödinger equation. Acta Math. Sci. 2014, 34B, 973–994. [Google Scholar] [CrossRef]
- Wang, D.S.; Guo, B.L.; Wang, X.L. Long-time asymptotics of the foucusing Kundu–Eckhaus equation with nonzero boundary conditions. J. Differ. Equ. 2014, 229, 296–309. [Google Scholar]
- Ma, W.X. Riemann–Hilbert problems of a six-component mKdV system and its soliton solutions. Acta Math. Sci. 2019, 39B, 509–523. [Google Scholar] [CrossRef]
- Bilman, D.; Buckingham, R. Large-order asymptotics for multiple-pole solitons of the focusing nonlinear Schrödinger equation. J. Nonlinear Sci. 2019, 29, 2185–2229. [Google Scholar] [CrossRef]
- Gardner, C.S.; Greene, J.M.; Kruskal, M.D.; Miura, R.M. Method for solving the Korteweg–deVries equation. Phys. Rev. Lett. 1967, 19, 1095–1097. [Google Scholar] [CrossRef]
- Matveev, V.B.; Salle, M.A. Darboux Transformation and Soliton; Springer: Berlin/Heidelberg, Germany, 1991; pp. 7–106. [Google Scholar]
- Hirota, R. Exact envelope-soliton solutions of a nonlinear wave equation. J. Math. Phys. 1973, 14, 805–809. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Two-mode fifth-order KdV equations: Necessary conditions for multiple-soliton solutions to exist. Nonlinear Dyn. 2017, 87, 1685–1691. [Google Scholar] [CrossRef]
- Wazwaz, A.M.; El-Tantawy, S.A. Solving the (3+1)-dimensional KP–Boussinesq and BKP-Boussinesq equations by the simplified Hirota’s method. Nonlinear Dyn. 2017, 88, 3017–3021. [Google Scholar] [CrossRef]
- Wazwaz, A.M. New Painlevé integrable (3+1)-dimensional combined pKP-BKP equation: Lump and multiple soliton solutions. Chinese Phys. Lett. 2023, 40, 120501. [Google Scholar] [CrossRef]
- Wang, M.L. Exact solutions for a compound KdV–Burgers equation. Phys. Lett. A 1996, 213, 279–287. [Google Scholar] [CrossRef]
- Fan, E.G. Soliton solutions for a generalized Hirota–Satsuma coupled KdV equation and a coupled MKdV equation. Phys. Lett. A 2001, 282, 18–22. [Google Scholar] [CrossRef]
- Dai, C.Q.; Wang, Y.Y. Coupled spatial periodic waves and solitons in the photovoltaic photorefractive crystals. Nonlinear Dyn. 2020, 102, 1733–1741. [Google Scholar] [CrossRef]
- Zhang, R.F.; Li, M.C.; Gan, J.Y.; Li, Q.; Lan, Z.Z. Novel trial functions and rogue waves of generalized breaking soliton equation via bilinear neural network method. Chaos Soliton. Fract. 2022, 154, 111692. [Google Scholar] [CrossRef]
- Abdelwahed, H.G.; Alsarhana, A.F.; El-Shewy, E.K.; Abdelrahman, M.A.E. Higher-order dispersive and nonlinearity modulations on the propagating optical solitary breather and super huge waves. Fractal Fract. 2023, 7, 127. [Google Scholar] [CrossRef]
- Zakharov, V.E.; Shabat, A.B. A scheme for integrating the nonlinear equations of mathematical physics by the method of the inverse scattering problem. II. Funkc. Anal. Prilozh. 1979, 13, 13–22. [Google Scholar]
- Deift, P.; Zhou, X. A steepest descent method for oscillatory Riemann–Hilbert problems. Asymptotics for the mKdV equation. Ann. Math. 1993, 137, 295–368. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Clarkson, P.A. Solitons, Nonlinear Evolution Equations and Inverse Scattering; Cambridge University Press: New York, NY, USA, 1991; pp. 24–32. [Google Scholar]
- Chen, H.H.; Liu, C.S. Solitons in nonuniform media. Phys. Rev. Lett. 1976, 37, 693–697. [Google Scholar] [CrossRef]
- Chan, W.L.; Li, K.S. Nonpropagating solitons of the variable coefficient and nonisospectral Korteweg–de Vries equation. J. Math. Phys. 1989, 30, 2521–2526. [Google Scholar] [CrossRef]
- Ning, T.K.; Chen, D.Y.; Zhang, D.J. The exact solutions for the nonisospectral AKNS hierarchy through the inverse scattering transform. Physica A 2004, 339, 248–266. [Google Scholar] [CrossRef]
- Serkin, V.N.; Hasegawa, A.; Belyaeva, T.L. Nonautonomous solitons in external potentials. Phys. Rev. Lett. 2007, 98, 074102. [Google Scholar] [CrossRef]
- Zhang, J.B.; Zhang, D.J.; Chen, D. Exact solutions to a mixed Toda lattice hierarchy through the inverse scattering transform. J. Phys. A Math. Theor. 2011, 44, 115201. [Google Scholar] [CrossRef]
- Zhang, S.; Gao, J.; Xu, B. An integrable evolution system and its analytical solutions with the help of mixed spectral AKNS matrix problem. Mathematics 2022, 10, 3975. [Google Scholar] [CrossRef]
- Wu, J.P. Riemann–Hilbert approach of the Newell-type long-wave–short-wave equation via the temporal-part spectral analysis. Nonlinear Dyn. 2019, 98, 749–760. [Google Scholar] [CrossRef]
- Wang, J.; Su, T.; Geng, X.G.; Li, R.M. Riemann–Hilbert approach and N-soliton solutions for a new two-component Sasa–Satsuma equation. Nonlinear Dyn. 2020, 101, 597–609. [Google Scholar] [CrossRef]
- Pu, J.C.; Chen, Y. Double and triple-pole solutions for the third-order flow equation of the Kaup–Newell system with zero/nonzero boundary conditions. J. Math. Phys. 2023, 64, 103502. [Google Scholar] [CrossRef]
- Ling, L.M.; Zhang, X.E. Large and infinite-order solitons of the coupled nonlinear Schrödinger equation. Physica D 2024, 457, 133981. [Google Scholar] [CrossRef]
- Li, Z.Q.; Tian, S.F.; Yang, J.J. On the soliton resolution and the asymptotic stability of N-soliton solution for the Wadati–Konno–Ichikawa equation with finite density initial data in space-time solitonic regions. Adv. Math. 2022, 402, 108639. [Google Scholar] [CrossRef]
- Li, Z.Q.; Tian, S.F.; Zhang, T.T.; Yang, J.J. Riemann–Hilbert approach and multi-soliton solutions of a variable-coefficient fifth-order nonlinear Schrodinger equation with N distinct arbitrary-order poles. Mod. Phys. B 2021, 35, 2150194. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, S. Analytical method for generalized nonlinear Schrödinger equation with time-varying coefficients: Lax representation, Riemann–Hilbert problem solutions. Mathematics 2022, 10, 1043. [Google Scholar] [CrossRef]
- Zhou, H.J.; Chen, Y. High-order soliton solutions and their dynamics in the inhomogeneous variable coefficients Hirota equation. Commun. Nonlinear Sci. Numer. Simulat. 2023, 120, 107149. [Google Scholar] [CrossRef]
- Ma, L.N.; Li, S.; Wang, T.M.; Xie, X.Y.; Du, Z. Multi-soliton solutions and asymptotic analysis for the coupled variable-coefficient Lakshmanan–Porsezian–Daniel equations via Riemann–Hilbert approach. Phys. Scripta 2023, 98, 75222. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, Y.; Ye, R. Riemann–Hilbert approach of the coupled nonisospectral Gross–Pitaevskii system and its multi-component generalization. Appl. Anal. 2021, 100, 2200–2209. [Google Scholar] [CrossRef]
- Zhang, S.; Zhou, H.M. Riemann–Hilbert method and soliton dynamics for a mixed spectral complex mKdV equation with time-varying coefficients. Nonlinear Dyn. 2023, 111, 18231–18243. [Google Scholar] [CrossRef]
- Jiang, Y.; Qu, Q.X. Some semirational solutions and their interactions on the zero-intensity background for the coupled nonlinear Schrdinger equations. Commun. Nonlinear Sci. Numer. Simula. 2019, 67, 403–413. [Google Scholar] [CrossRef]
- Li, Y.H.; Li, R.M.; Xue, B.; Geng, X.G. A generalized complex mKdV equation: Darboux transformations and explicit solutions. Wave Motion 2020, 98, 102639. [Google Scholar] [CrossRef]
- Radhakrishnan, R.; Lakshmanan, M. Exact soliton solutions to coupled nonlinear Schrödinger equations with higher-order effects. Phys. Rev. E 1996, 54, 2949–2955. [Google Scholar] [CrossRef] [PubMed]
- Anco, S.C.; Mohiuddin, M.; Wolf, T. Traveling waves and conservation laws for complex mKdV-type equations. Appl. Math. Comput. 2012, 219, 679–698. [Google Scholar] [CrossRef]
- Wadati, M. The modified Korteweg–de Vries equation. J. Phys. Soc. Jpn. 1973, 34, 1289–1296. [Google Scholar] [CrossRef]
- Marchant, T.R. Asymptotic solitons on a non-zero mean level. Chaos Soliton. Fract. 2007, 32, 1328–1336. [Google Scholar] [CrossRef]
- Laskin, N. Fractional quantum mechanics. Phys. Rev. E 2000, 62, 3135–3145. [Google Scholar] [CrossRef] [PubMed]
- Brockmann, D.; Hufnagel, L.; Geisel, T. The scaling laws of human travel. Nature 2006, 439, 462–465. [Google Scholar] [CrossRef] [PubMed]
- Fujioka, J.; Espinosa, A.; Rodríguez, R.F. Fractional optical solitons. Phys. Lett. A 2010, 374, 1126–1134. [Google Scholar] [CrossRef]
- He, J.H. A tutorial review on fractal spacetime and fractional calculus. Int. J. Theor. Phys. 2014, 53, 3698–3718. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Been, J.B.; Carr, L.D. Fractional integrable nonlinear soliton equation. Phys. Rev. Lett. 2022, 128, 184101. [Google Scholar] [CrossRef] [PubMed]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Vosika, Z.B.; Lazovic, G.M.L.; Misevic, G.N.; Simic-Krstic, J.B.; Rubinsky, B. Fractional calculus model of electrical impedance applied to human skin. PLoS ONE 2013, 8, e59483. [Google Scholar] [CrossRef] [PubMed]
- Fan, J.; Zhu, N.; Wang, L.L.; Liu, Z.; Wang, C.Y.; Liu, Y. Influence of hierarchic structure on the moisture permeability of biomimic woven fabric using fractal derivative method. Adv. Math. Phys. 2015, 2015, 817437. [Google Scholar] [CrossRef]
- Plemelj, J. Riemannsche Funktionenscharen mit gegebener Monodromiegruppe. Monatsch. Math. Phys. 1908, 19, 211–246. [Google Scholar] [CrossRef]
- He, J.H. A new approach to nonlinear partial differential equations. Commun. Nonlinear Sci. Numer. Simulat. 1997, 2, 203–205. [Google Scholar] [CrossRef]
- He, J.H. A variational iteration approach to nonlinear problems and its applications. Mech. Appl. 1998, 20, 30–31. [Google Scholar]
- He, J.H. Variational iteration method-a kind of nonlinear analytical technique: Some examples. Int. J. Non-Linear Mech. 1999, 34, 699–708. [Google Scholar] [CrossRef]
- Khalil, R.; Horani, M.A.; Yousef, A.; Sababheh, M. A new definition of fractional derivative. J. Comput. Appl. Math. 2014, 264, 65–70. [Google Scholar] [CrossRef]
- Liang, Z.X.; Zhang, Z.D.; Liu, W.M. Dynamics of a bright soliton in Bose–Einstein condensates with time-dependent atomic scattering length in an expulsive parabolic potential. Phys. Rev. Lett. 2005, 94, 050402. [Google Scholar] [CrossRef] [PubMed]
- Zhong, W.P.; Belić, M.R. Soliton tunneling in the nonlinear Schrödinger equation with variable coefficients and an external harmonic potential. Phys. Rev. E 2010, 81, 056604. [Google Scholar] [CrossRef]
- Bayındır, C.; Altintas, A.A.; Ozaydin, F. Self-localized solitons of a q-deformed quantum system. Commun. Nonlinear Sci. Numer. Simulat. 2021, 92, 105474. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Wang, X.; Xu, B. Riemann–Hilbert Method Equipped with Mixed Spectrum for N-Soliton Solutions of New Three-Component Coupled Time-Varying Coefficient Complex mKdV Equations. Fractal Fract. 2024, 8, 355. https://doi.org/10.3390/fractalfract8060355
Zhang S, Wang X, Xu B. Riemann–Hilbert Method Equipped with Mixed Spectrum for N-Soliton Solutions of New Three-Component Coupled Time-Varying Coefficient Complex mKdV Equations. Fractal and Fractional. 2024; 8(6):355. https://doi.org/10.3390/fractalfract8060355
Chicago/Turabian StyleZhang, Sheng, Xianghui Wang, and Bo Xu. 2024. "Riemann–Hilbert Method Equipped with Mixed Spectrum for N-Soliton Solutions of New Three-Component Coupled Time-Varying Coefficient Complex mKdV Equations" Fractal and Fractional 8, no. 6: 355. https://doi.org/10.3390/fractalfract8060355
APA StyleZhang, S., Wang, X., & Xu, B. (2024). Riemann–Hilbert Method Equipped with Mixed Spectrum for N-Soliton Solutions of New Three-Component Coupled Time-Varying Coefficient Complex mKdV Equations. Fractal and Fractional, 8(6), 355. https://doi.org/10.3390/fractalfract8060355