
Applicability of an Ionising Radiation Measuring System for Real-Time Effective-Dose-Optimised Route Finding Solution during Nuclear Accidents

 , , and
, , and
Abstract
1. Introduction
1.1. Presentation of the Professional Foundations of the Research Problem from the Perspective of Rescue Operations
1.2. Introduction of Effective Dose Radiation Measurement Systems for Route Finding Rescue Procedures
1.3. Analysis of State of Research for Route Finding Methods and Its Application in the Present Study
1.4. Determination of the Research Objectives of the Present Study
2. Materials and Methods
2.1. Introduction of Research Design and Main Steps of the Experiments
- Creating large-scale homogeneous surface sources with different isotopes.
- Determination of the energy- and position-dependent radiation shielding efficiency of shielded vehicles to calculate the dose rate inside of the vehicle from any unshielded detector reading.
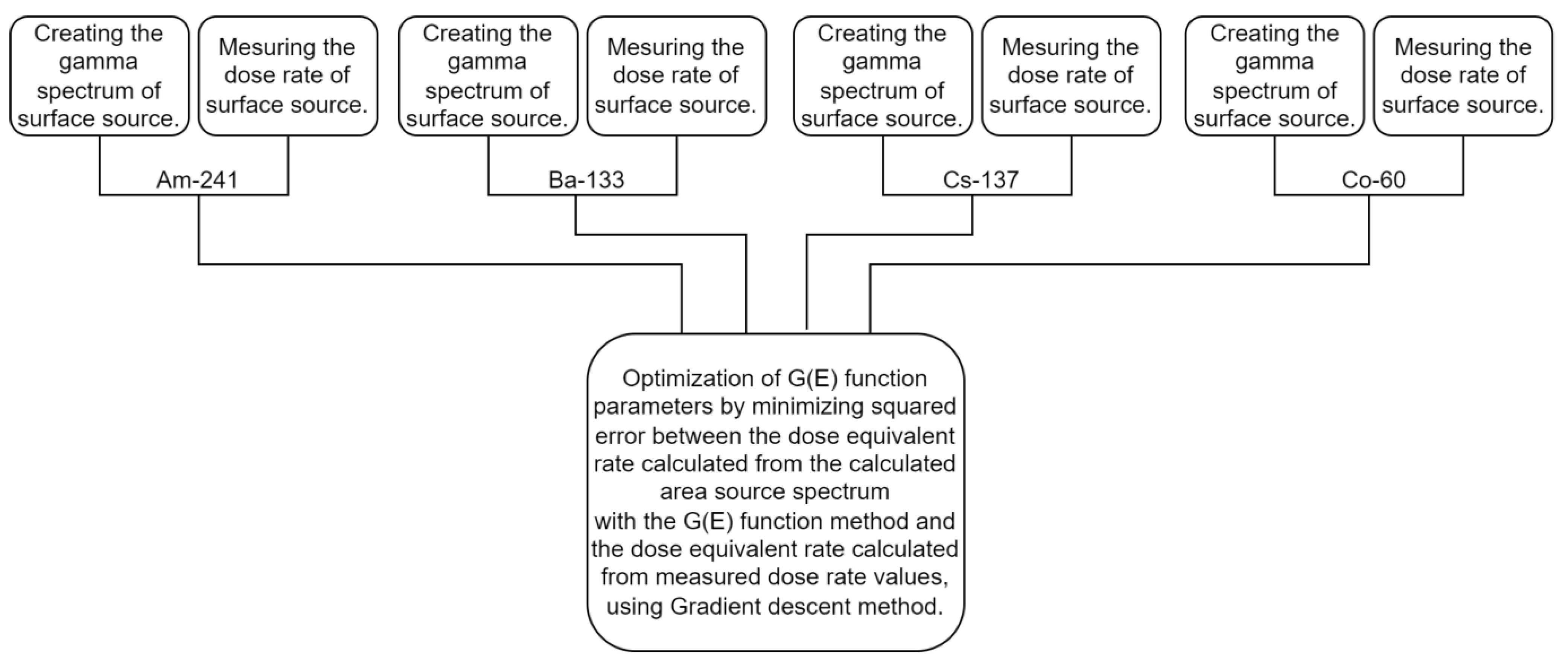
- Determination of the G(E) functions for different vehicles.
- Determination of the external and internal radiation exposure with and without the use of different individual and collective protective equipment.
- Investigation of the performance of a dose-optimising pathfinding algorithm based on nuclear measurements.
- Validation of the necessity of the decision support algorithm on constrained paths with known dose rates.
2.2. Description of the Vehicles Used for Research Experiments
2.3. Introduction of the Radiation Measuring Instruments and Radioactive Reference Sources
2.4. Introduction of the Radiation Protection Features of the Firefighting Rescue Vehicle
2.5. Presentation of the Measurement and Calculation Methodology
2.5.1. Calculations for Radiation Measurements
2.5.2. Calculations for the Determination of Protection against Airborne Contamination
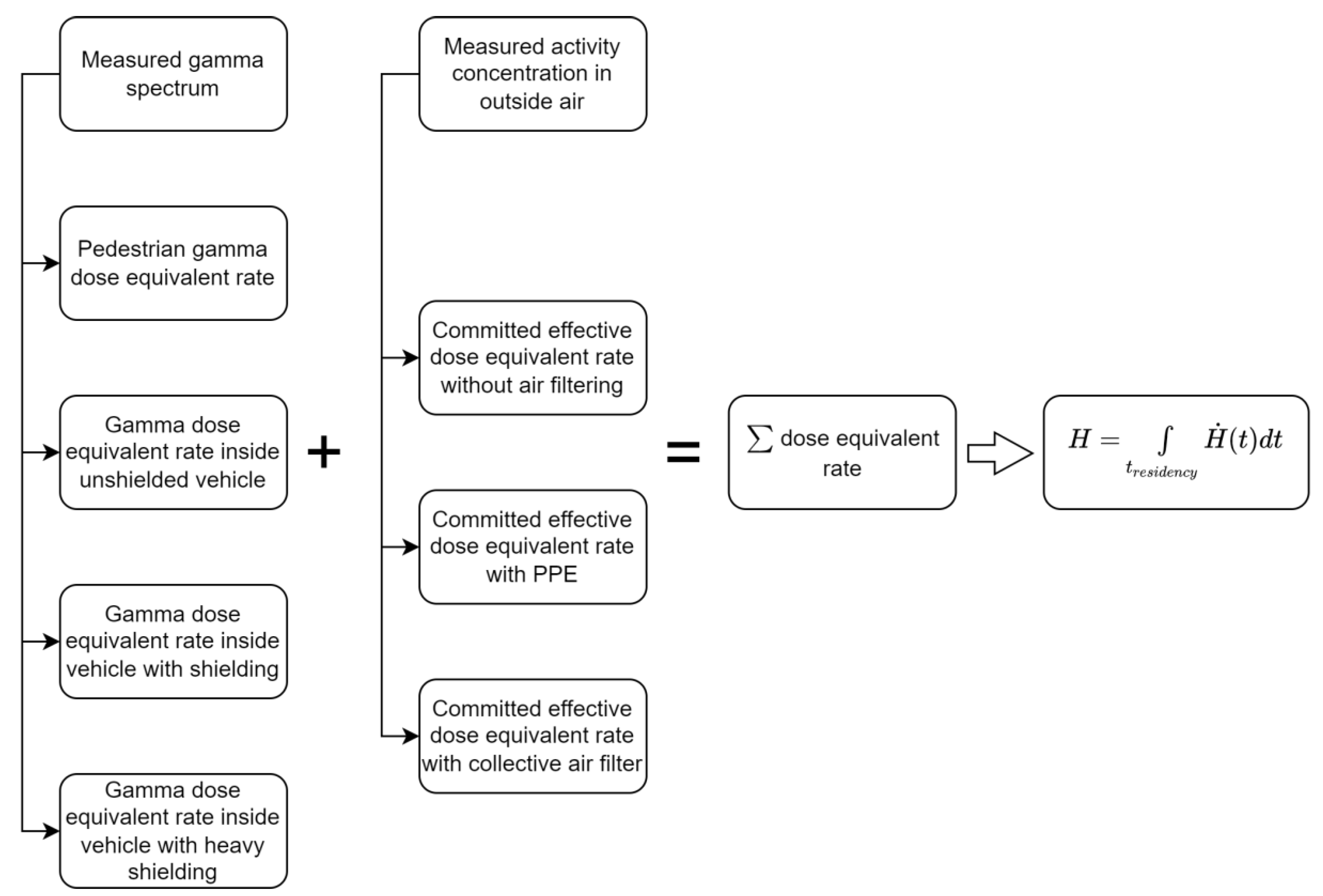
2.5.3. Summarised Dose Rate Calculation
2.6. Validation of the Experimental Results
3. Results and Discussion
3.1. Summary and Discussion of Research Measurements, Calculation, and Validation Results
- Measurement of the ambient dose equivalent rate H*(10) with a RadGM GM tube-based gamma dose rate transmitter.
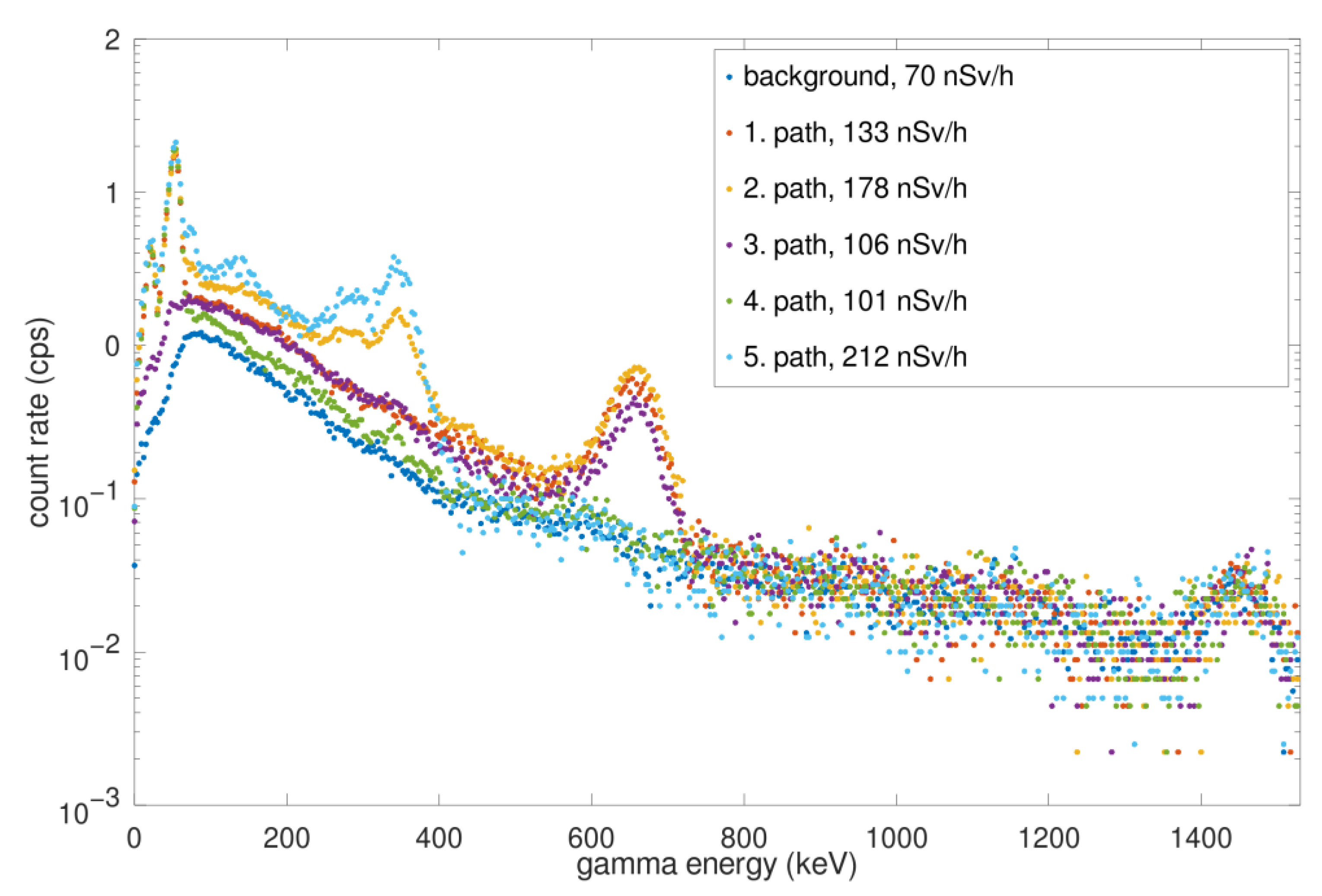
- Measurements of the isotopic composition by the RadNDI scintillation detector along with the utilisation of RadSpect spectrometry software.
- Airborne radioactive aerosols and iodine, causing internal radiation exposure by inhalation, have been measured using the OnRIM alpha, beta, and gamma aerosol and iodine monitor.
- During the estimation of the effective dose for each route, the dose rate measured inside and outside the vehicle, the shielding effect of the vehicle, the filtering efficiency of the collective protection system, and the speed and travel time of the vehicle were taken into account.
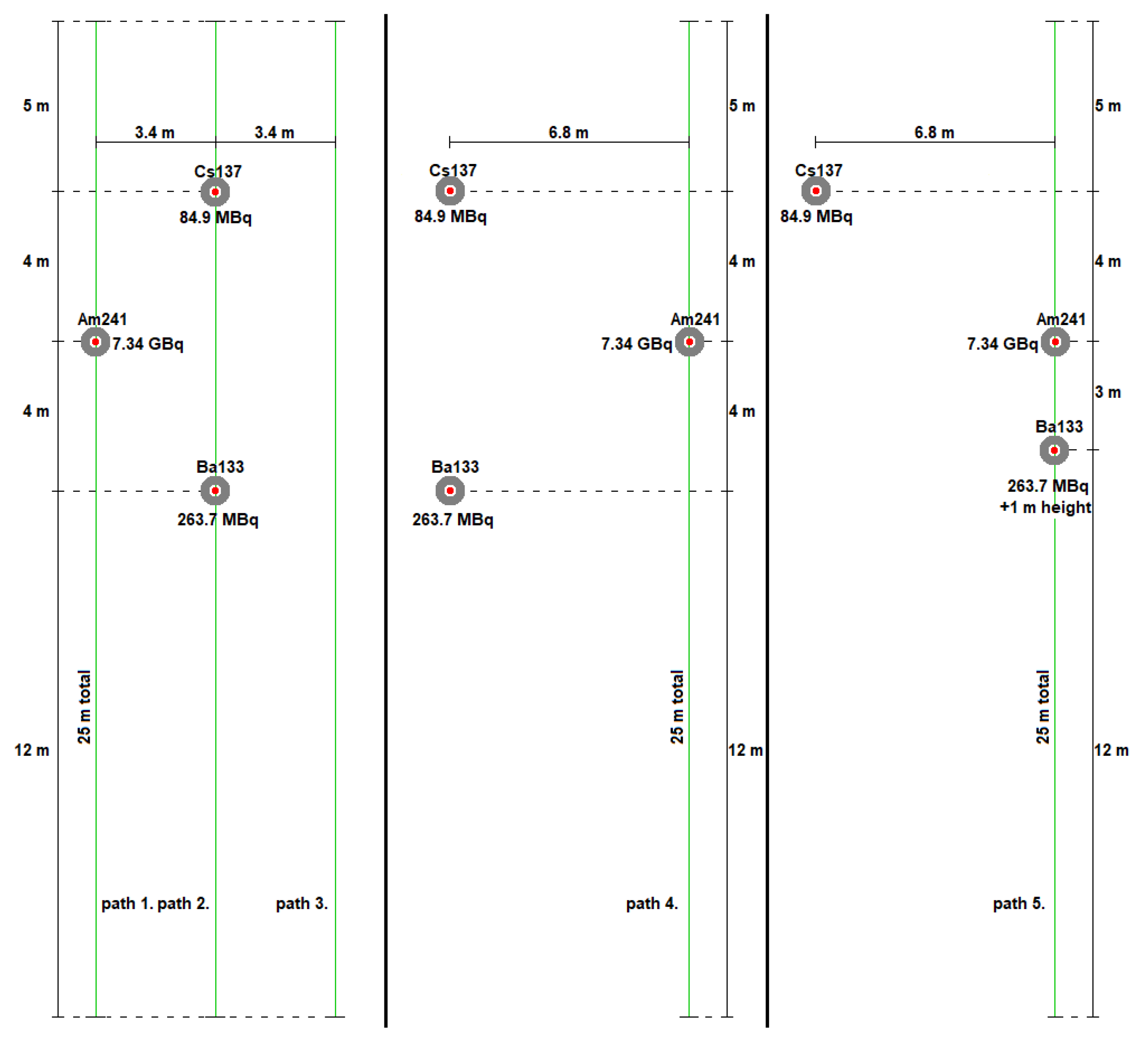
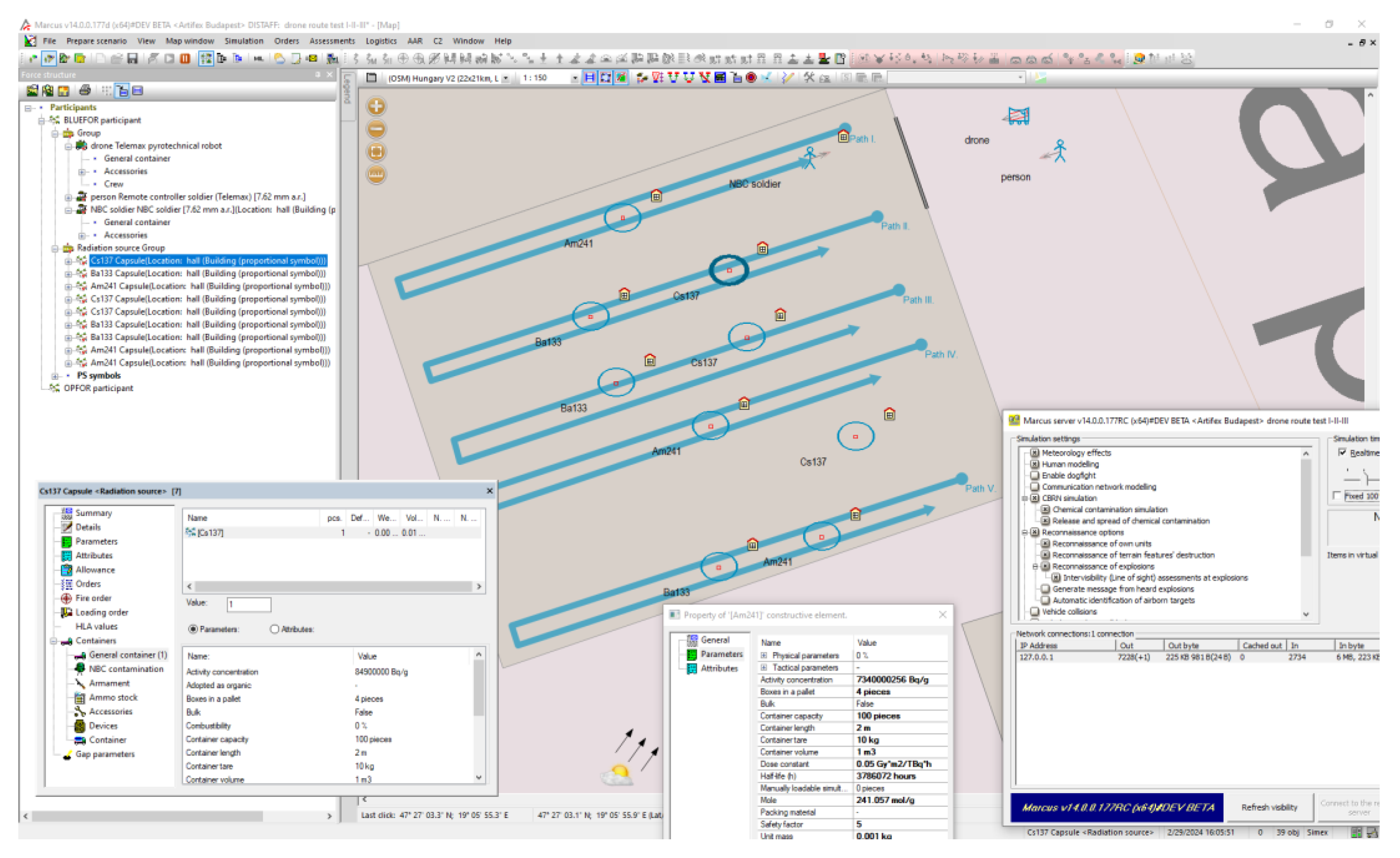
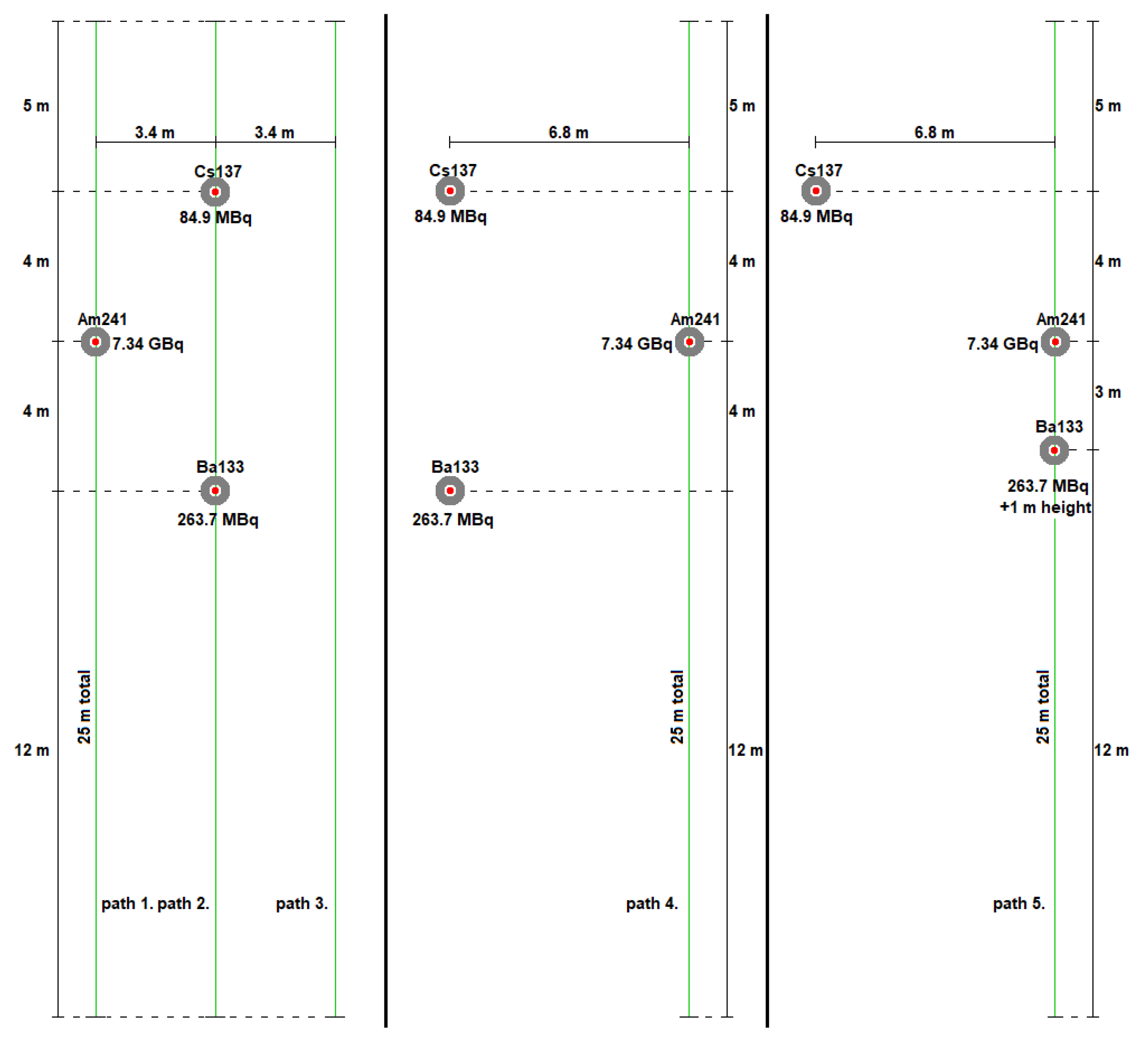
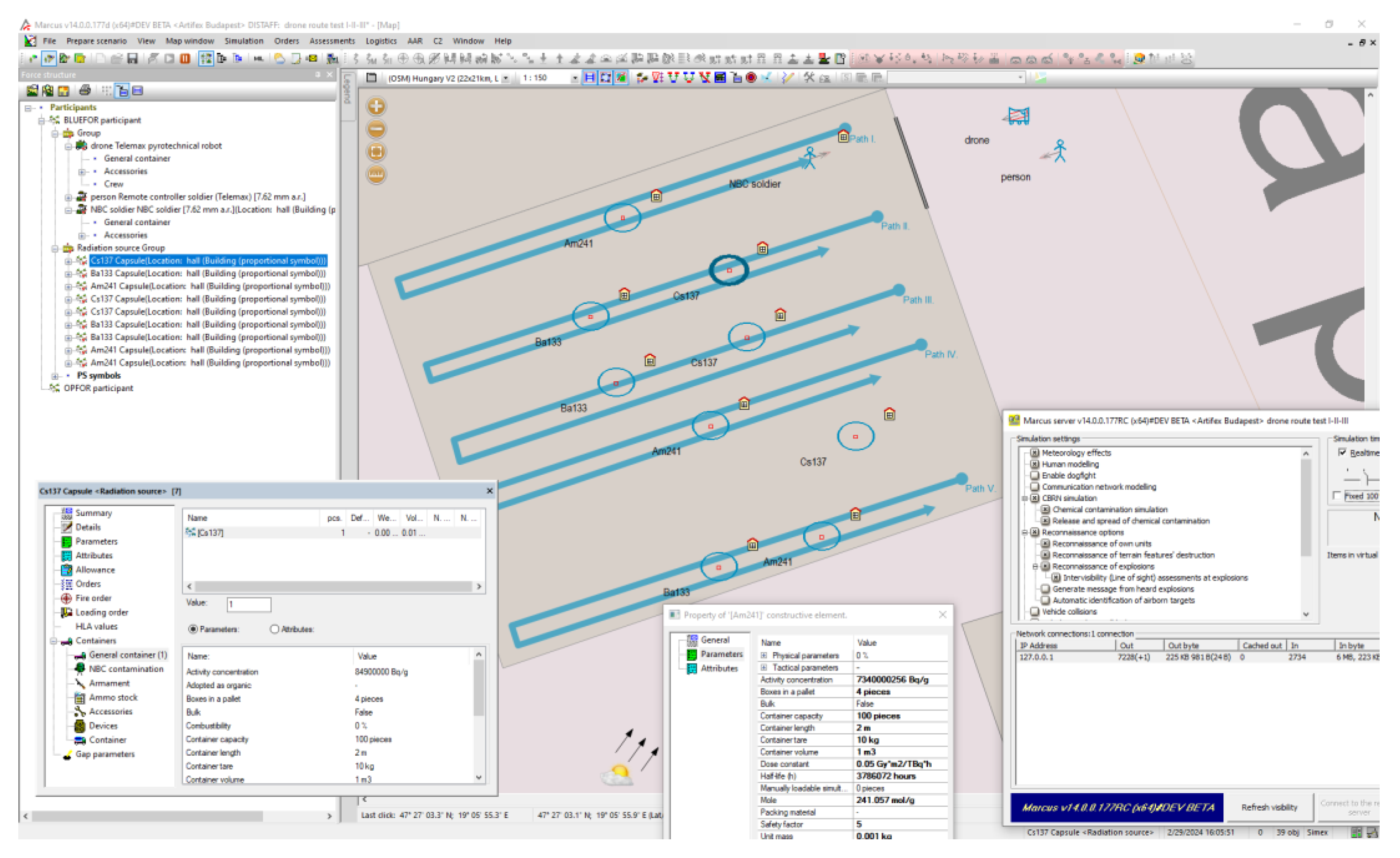
- The measuring capability of the created test system was validated in a test area using gamma point sources with different activity and energy levels (241Am, 133Ba, 137Cs, and 60Co). The measured values were validated by using the MARCUS constructive simulator.
3.2. Discussion on the Application of Route Finding Methods
- In a real event, airborne radiation reconnaissance can have two purposes. The detection of radioactive materials or contaminated areas can be used to determine the ideal route for exit. In the other case, it is advisable to check the routes considered passable by the vehicles participating in the evacuation in advance by flying and based on the data measured in this way further decide which is the ideal route.
- During the authors’ previous research, they carried out aerial radiation detection using a helicopter, where they also measured large-scale and point-like radiation sources. However, with the measurement instrument developed on the basis of the experiences at that time, they only carried out measurements using a method simulating flight. The purpose of this was primarily to test the method to find out if it is possible to collect measurement data that can be used for research with this solution.
- In the experiment in the present study, the authors created measuring arrangements where they tried to simulate a real situation by placing different isotopes in different places. In the future, they also plan to examine additional measurement arrangements, and after that, they will carry out comparisons for those involved in aerial reconnaissance, using the arrangement developed on the basis of experience as a benchmark.
- The authors’ objective was to find answers to what kind of radiation-related data should be taken into account during route planning in the case of the elimination of an event related to radioactive substances. During reconnaissance operations, they can rely on data from radiation measuring sensors placed on air or ground vehicles. In this case, they assume that when planning the aerial reconnaissance route, the vehicle does not run into obstacles or that the device can automatically avoid obstacles.
- The data from aerial reconnaissance must be taken into account during the planning of the vehicle’s route, where values above the predetermined limit appear as an obstacle (the route is impassable), and lower radiation values increase the dose absorbed during the route. The authors have the same approach to reconnaissance with vehicles. The vehicle discovers the originally practicable routes assigned to it and corrects or supplements previously available or unavailable data with accurate data that can be measured by the vehicle; based on the displayed values, the driver can decide where to go or continue even with increasing radiation values, reducing exposure by increasing the speed if that is the only possible route.
- Avoiding the obstacles that appear is a different specialist task. As described in Section 1.3, the original reconnaissance route will be designed in such a way that it is passable; any obstacles that may appear are basic tasks for companies dealing with the autonomous control of vehicles. In a radiation-related task, “invisible” obstacles or “difficulties” appear as a new factor, and our goal was to measure, process, and display them.
3.3. Discussion on the Applicability of the Measurement Methodology
- The shielding effect of the vehicle varies from the type of vehicles.
- The body of the vehicle does not have the same shielding efficiency in all directions.
- The efficiency of the filters changes due to time and depending on the humidity of the air.
- The applied ropeway can be used to create reproducible paths but is limited in the number of sources and the extent of contamination.
3.4. Discussion on Novelty of this Research and Further Research Possibilities
- With the use of the presented measurement methodology, the energy-dependent radiation shielding of an arbitrary vehicle can be determined.
- The vehicle carrying the detectors may shield the detectors in a direction-dependent way. In our case, the shielded vehicle attenuated the radiation received by the detector mounted on the back side of the vehicle by approximately 50% compared to an unshielded detector. During the calibration of vehicle-mounted radiation measuring detectors, one has to take into account the influencing effect of the vehicle on the measured value.
- To choose the appropriate evacuation vehicle (a vehicle with appropriate shielding), it is necessary to know the energy distribution of the gamma radiation that can be measured in the contaminated area, i.e., its spectrum. With the knowledge of the gamma spectrum, the external dose received by persons to be evacuated may be estimated more precisely.
- By using the G(E) functions determined in advance for different vehicles, one can estimate the dose the evacuated persons would suffer in the event of an escape with these vehicles.
- The applied surveying method, the route taken in the contaminated area, and especially the survey of the entire area give the opportunity to choose the optimal route because the route causing the minimum dose can be selected by summing up the available dose rate values.
- During nuclear power plant accidents, it is not enough to measure the H*(10) value because after an accident the released radionuclides may cause a committed effective dose higher than the external effective dose in the same residency time by one order of magnitude.
- If the mass of the shielding of the evacuation vehicle decreases the speed of the vehicle, it may increase the total effective dose received during evacuation.
- By upgrading the measurement system, an improvement in the minimum detectable activity and standard deviation can be achieved.
- The altitude and spectrum correction mechanism with live and measured environmental parameters can make the system more precise and quicker, for example, for airborne radiation monitoring applications.
- To validate the method, on-site tests should be conducted with known contamination levels in the soil and in the air. Establishing such conditions is extremely difficult and dangerous.
- The integration of detectors on UAVs and UGVs is already in progress. In this case, two European projects should be highlighted. These projects are named Chemical, Biological, Radiological and Nuclear Reconnaissance and Surveillance Systems [68] and Chemical, Biological, Radiological and Nuclear Surveillance as a Service (CBRN SaaS) [69].
4. Conclusions
- The authors successfully determined the energy-dependent shielding effectiveness of an autonomous radiation-shielded emergency vehicle, enabling the estimation of dose rates for injured persons inside the vehicle using data obtained from unshielded detectors.
- By developing an algorithm capable of analysing data collected from various pathways, the authors identified the path with the lowest suffered effective dose, taking into account both external and internal dose estimations. The validation of our results was conducted in a designated test area, demonstrating agreement between measured and simulated results.
- A potential future endeavour could entail the creation of an application similar to Waze or Google Maps, wherein the recommended path for drivers is based not on prevailing traffic conditions but rather on potential radiation exposure. Furthermore, integrating a drone swarm could enhance the system’s capabilities by providing parallel data sources, thereby facilitating more comprehensive and real-time dose assessments.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- UN Office for Disaster Risk Reduction. Words into Action Guidelines. Implementation Guide for Man-made and Technological Hazards. Available online: https://www.undrr.org/publication/words-action-guideline-man-made/technological-hazards (accessed on 8 March 2024).
- International Search and Rescue Advisory Group. INSARAG Guidelines 2020. Available online: https://www.insarag.org/methodology/insarag-guidelines/ (accessed on 8 March 2024).
- EUR-Lex. Decision No 1313/2013/EU of the European Parliament and of the Council of 17 December 2013 on a Union Civil Protection Mechanism. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX:32013D1313 (accessed on 8 March 2024).
- European Commission. European Civil Protection and Humanitarian Aid Operation. Available online: https://civil-protection-humanitarian-aid.ec.europa.eu/what/civil-protection_en (accessed on 8 March 2024).
- Bloem, S.; Cullen, A.C.; Mearns, L.O.; Abatzoglou, J.T. The Role of International Resource Sharing Arrangements in Managing Fire in the Face of Climate Change. Fire 2022, 5, 88. [Google Scholar] [CrossRef]
- Santiago-Gómez, E.; Rodríguez-Rodríguez, C. Building Forest Fires Resilience, the Incorporation of Local Knowledge into Disaster Mitigation Strategies. Soc. Sci. 2023, 12, 420. [Google Scholar] [CrossRef]
- Goniewicz, K.; Khorram-Manesh, A.; Hertelendy, A.J.; Goniewicz, M.; Naylor, K.; Burkle, F.M., Jr. Current Response and Management Decisions of the European Union to the COVID-19 Outbreak: A Review. Sustainability 2020, 12, 3838. [Google Scholar] [CrossRef]
- Dent, R.A. Management of Casualties from Radiation Events. Eur. Burn J. 2023, 4, 584–595. [Google Scholar] [CrossRef]
- Chitikena, H.; Sanfilippo, F.; Ma, S. Robotics in Search and Rescue (SAR) Operations: An Ethical and Design Perspective Framework for Response Phase. Appl. Sci. 2023, 13, 1800. [Google Scholar] [CrossRef]
- Centre for Strategy & Evaluation Services. Evaluation Study of Definitions, Gaps and Costs of Response Capacities for the Union Civil Protection Mechanism. Available online: https://ec.europa.eu/echo/system/files/2020-01/capacities_study_final_report_public.pdf (accessed on 8 March 2024).
- EUR-Lex. Commission Implementing Decision (EU) 2021/88 of 26 January 2021 amending Implementing Decision (EU) 2019/570 as Regards rescEU Capacities in the Area of Chemical, Biological, Radiological and Nuclear Incidents. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX:32021D0088 (accessed on 8 March 2024).
- Kátai-Urbán, L.; Cimer, Z.; Lublóy, É.E. Examination of the Fire Resistance of Construction Materials from Beams in Chemical Warehouses Dealing with Flammable Dangerous Substances. Fire 2023, 6, 293. [Google Scholar] [CrossRef]
- Kátai-Urbán, M.; Bíró, T.; Kátai-Urbán, L.; Varga, F.; Cimer, Z. Identification Methodology for Chemical Warehouses Dealing with Flammable Substances Capable of Causing Firewater Pollution. Fire 2023, 6, 345. [Google Scholar] [CrossRef]
- Cimer, Z.; Vass, G.; Zsitnyányi, A.; Kátai-Urbán, L. Application of Chemical Monitoring and Public Alarm Systems to Reduce Public Vulnerability to Major Accidents Involving Dangerous Substances. Symmetry 2021, 13, 1528. [Google Scholar] [CrossRef]
- Rimpler-Schmid, A.; Trapp, R.; Leonard, S.; Kaunert, C.; Dubucq, Y.; Lefebvre, C.; Mohn, H.; EU Preparedness and Responses to Chemical, Biological, Radiological and Nuclear (CBRN) Threats. European Union. 2021. Available online: https://centrefrancaisnrbc.fr/mediael/EXPO_STU%282021%29653645_EN.pdf (accessed on 8 March 2024).
- Szabó, B.Á.; Kobolka, I.; Zádori, I. Cost dynamics of helicopter emergency services: A Hungarian example. Heliyon 2023, 9, 14336. [Google Scholar] [CrossRef]
- Petrányi, J.; Zsitnyányi, A.; Jónás, J.; Garai, Z.; Kátai-Urbán, L.; Vass, G. Assessing the radiation contamination of large areas using advanced technologies. Radiat. Prot. Dosim. 2023, 199, 915–921. [Google Scholar] [CrossRef]
- Kawatsuma, S.; Fukushima, M.; Okada, T. Emergency response by robots to Fukushima-Daiichi accident: Summary and lessons learned. Ind. Rob. 2012, 39, 428–435. [Google Scholar] [CrossRef]
- Banos, A.; Hayman, J.; Wallace-Smith, T.; Bird, B.; Lennox, B.; Scott, T.B. An assessment of contamination pickup on ground robotic vehicles for nuclear surveying application. J. Radiol. Prot. 2021, 41, 179–196. [Google Scholar] [CrossRef]
- International Atomic Energy Agency (IAEA). Safety Standards for Protecting People and the Environment—Occupational Radiation Protection, IAEA, Vienna. 2018. Available online: https://www-pub.iaea.org/MTCD/Publications/PDF/PUB1785_web.pdf (accessed on 8 March 2024).
- Rossi, F.; Cosentino, L.; Longhitano, F.; Minutoli, S.; Musico, P.; Osipenko, M.; Poma, G.E.; Ripani, M.; Finocchiaro, P. The Gamma and Neutron Sensor System for Rapid Dose Rate Mapping in the CLEANDEM Project. Sensors 2023, 23, 4210. [Google Scholar] [CrossRef]
- Omega, R.L.; Ishigaki, Y.; Permana, S.; Matsumoto, Y.; Yamamoto, K.; Shozugawa, K.; Hori, M. Low-Cost Sensor Deployment on a Public Minibus in Fukushima Prefecture. Sensors 2024, 24, 1375. [Google Scholar] [CrossRef]
- Xu, H.; Ai, X.; Wang, Y.; Chen, W.; Li, Z.; Guan, X.; Wei, X.; Xie, J.; Chen, Y. Ground Radioactivity Distribution Reconstruction and Dose Rate Estimation Based on Spectrum Deconvolution. Sensors 2023, 23, 5628. [Google Scholar] [CrossRef]
- International Atomic Energy Agency, Generic Procedures for Assessment and Response during a Radiological Emergency, IAEA, Vienna. 2000. Available online: https://www-pub.iaea.org/MTCD/Publications/PDF/te_1162_prn.pdf (accessed on 8 March 2024).
- Medici, S.; Carbonez, P.; Damet, J.; Bochud, F.; Bailat, C.; Pitzschke, A. Detecting Intake of Radionuclides: In Vivo Screening Measurements with Conventional Radiation Protection Instruments. Radiat. Meas. 2019, 122, 126–132. [Google Scholar] [CrossRef]
- International Atomic Energy Agency, Safety Reports Series n°101: Medical Management of Radiation Injuries, IAEA, Vienna. 2012. Available online: https://www.iaea.org/publications/12370/medical-management-of-radiation-injuries (accessed on 8 March 2024).
- Morishita, Y.; Takasaki, K.; Kitayama, Y.; Tagawa, A.; Shibata, T.; Hoshi, K.; Kaneko, J.; Higuchi, M.H.; Oura, M. A phoswich alpha/beta detector for monitoring in the site of Fukushima Daiichi Nuclear Power Station. Radiat. Meas. 2023, 160, 106896. [Google Scholar] [CrossRef]
- Baras, N.; Dasygenis, M. UGV Coverage Path Planning: An Energy-Efficient Approach through Turn Reduction. Electronics 2023, 12, 2959. [Google Scholar] [CrossRef]
- Lowdon, M.; Martin, P.G.; Hubbard, M.W.J.; Taggart, M.P.; Connor, D.T.; Verbelen, Y.; Sellin, P.J.; Scott, T.B. Evaluation of Scintillator Detection Materials for Application within Airborne Environmental Radiation Monitoring. Sensors 2019, 19, 3828. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, Y.; Shi, J.; Long, L.; Lu, Z. Robust Lidar-Inertial Odometry with Ground Condition Perception and Optimization Algorithm for UGV. Sensors 2022, 22, 7424. [Google Scholar] [CrossRef]
- Zhao, L.; Qu, S.; Xu, H.; Wei, Z.; Zhang, C. Energy-efficient trajectory design for secure SWIPT systems assisted by UAV-IRS. Veh. Commun. 2024, 45, 100725. [Google Scholar] [CrossRef]
- Sun, G.; Zhang, Y.; Liao, D.; Yu, H.; Du, X.; Guizani, M. Bus-Trajectory-Based Street-Centric Routing for Message Delivery in Urban Vehicular Ad Hoc Networks. IEEE Trans. Veh. Technol. 2018, 67, 7550–7563. [Google Scholar] [CrossRef]
- Xu, J.; Park, S.H.; Zhang, X.; Hu, J. The Improvement of Road Driving Safety Guided by Visual Inattentional Blindness. IEEE Trans. Intell. Transp. Syst. 2022, 23, 4972–4981. [Google Scholar] [CrossRef]
- Yue, W.; Li, C.; Wang, S.; Xue, N.; Wu, J. Cooperative Incident Management in Mixed Traffic of CAVs and Human-Driven Vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 24, 12462–12476. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, R.; Cheng, Q.; Ochieng, W.Y. Measurement Quality Control Aided Multisensor System for Improved Vehicle Navigation in Urban Areas. IEEE Trans. Ind. Electron. 2024, 71, 6407–6417. [Google Scholar] [CrossRef]
- Sun, R.; Dai, Y.; Cheng, Q. An Adaptive Weighting Strategy for Multisensor Integrated Navigation in Urban Areas. IEEE Internet Things J. 2023, 10, 12777–12786. [Google Scholar] [CrossRef]
- Marques, L.; Vale, A.; Vaz, P. State-of-the-Art Mobile Radiation Detection Systems for Different Scenarios. Sensors 2021, 21, 1051. [Google Scholar] [CrossRef] [PubMed]
- Pradeep Kumar, A.; Shanmugha Sundaram, G.A.; Sharma, B.K.; Venkatesh, S.; Thiruvengadathan, R. Advances in gamma radiation detection systems for emergency radiation monitoring. Nucl. Eng. Technol. 2020, 52, 2151–2161. [Google Scholar] [CrossRef]
- Miyombo Ernest, E.; Liu, Y.; Ayodeji, A. Knowledge-Based Navigation Algorithm for Autonomous Radiation Detection, Mapping and Path Planning. 2024. Available online: https://ssrn.com/abstract=4681443 (accessed on 8 March 2024).
- Wu, Z.; Yin, Y.; Liu, J.; Zhang, D.; Chen, J.; Jiang, W. A Novel Path Planning Approach for Mobile Robot in Radioactive Environment Based on Improved Deep Q Network Algorithm. Symmetry 2023, 15, 2048. [Google Scholar] [CrossRef]
- Zhang, D.; Luo, R.; Yin, Y.; Zou, S. Multi-objective path planning for mobile robot in nuclear accident environment based on improved ant colony optimization with modified A. Nucl. Eng. Technol. 2023, 55, 1838–1854. [Google Scholar] [CrossRef]
- Ohba, T.; Tanigawa, K.; Liutsko, L.L. Evacuation after a nuclear accident: Critical reviews of past nuclear accidents and proposal for future planning. Environ. Int. 2021, 148, 106379. [Google Scholar] [CrossRef] [PubMed]
- Defence Industry Associaton of Hungary, Hungarian Defence Industry 2023. Available online: https://vedelmiipar.hu/downloads/tmp/MVSZ_Almanach_2023_web.pdf (accessed on 4 April 2024).
- Moriuchi, S. A New Method of Dose Evaluation by Spectrum Dose Conversion Operator and Determination of the Operator, Japan Atomic Energy Research Institute 1971. Available online: https://inis.iaea.org/search/search.aspx?orig_q=RN:3016720 (accessed on 4 April 2024).
- Drozdovitch, V.; Kryuchkov, V.; Chumak, V.; Kutsen, V.; Golovanov, I.; Bouville, A. Thyroid doses due to Iodine-131 inhalation among Chernobyl cleanup workers. Radiat. Environ. Biophys. 2019, 58, 183–194. [Google Scholar] [CrossRef] [PubMed]
- Garger, E.K. Air concentrations of radionuclides in the vicinity of Chernobyl and the effects of resuspension Ukrainian Agricultural Academy of Sciences, Institute of Radioecology, 252033, Kiev, Tolstoy Street 14, Ukraine. J. Aerosol Sci. 1994, 25, 745–753. [Google Scholar] [CrossRef]
- Zsitnyányi, A. Development of Hungarian Light Armoured Vehicles for Disaster Management and Military Applications. Hadmérnök 2022, 16, 41–53. [Google Scholar] [CrossRef]
- Zsitnyányi, A. KOMONDOR—Könnyű páncélvédett bázisjármű család fejlesztése Magyarországon II. rész. Haditechnika 2020, 54, 35–42. [Google Scholar] [CrossRef]
- Gamma Technical Corporation, Budapest, Hungary. RadGM Gamma Dose Rate Transmitter. 2024. Available online: https://gammatech.hu/?mnuGrp=mnuProducts&module=products&lang=eng&group=sugarzasmero_monitoring&product=radgm (accessed on 8 March 2024).
- International Electrotechnical Commission. IEC 60846-1 Radiation Protection Instrumentation—Ambient and/or Directional Dose Equivalent (Rate) Meters and/or Monitors for Beta, X and Gamma Radiation—Part 1: Portable Workplace and Environmental Meters and Monitors. 2009. Available online: https://webstore.iec.ch/publication/3682 (accessed on 8 March 2024).
- Gamma Technical Corporation, Budapest, Hungary. RadNDI Intelligent Scintillation Detector. 2024. Available online: https://gammatech.hu/?mnuGrp=mnuProducts-mnuProducts_Category&module=products&lang=eng&group=sugarzasmero_spektroszkopia&product=radndi (accessed on 8 March 2024).
- Gamma Technical Corporation, Budapest, Hungary. RadSpect Software. 2024. Available online: https://gammatech.hu/?mnuGrp=mnuProducts&module=products&lang=eng&group=softwares_gamma&product=radspect (accessed on 8 March 2024).
- Gamma Technical Corporation, Budapest, Hungary. OnRIM Online Radioactive Aerosol and Iodine Monitoring System. 2024. Available online: https://www.gammatech.hu/index.php?mnuGrp=mnuProducts&module=products&lang=eng&group=kornyezetimonitoring_hordozhato&product=onrim&menupath=kornyezetimonitoring-kornyezetimonitoring_hordozhato- (accessed on 8 March 2024).
- Kessler, C.; Burns, D.; Finta, V. Key Comparison BIPM.RI(I)-K1 of the Air-Kerma Standards of the BFKH, Hungary and the BIPM in 60Co Gamma Radiation. Available online: https://www.bipm.org/documents/20126/44696688/BIPM.RI%28I%29-K1_BFKH_2021.pdf/25b878bd-45c7-5803-f91d-de10b9ecb3e9 (accessed on 17 March 2024).
- Abbas, M.I.; El-Khatib, A.M.; Elsafi, M.; El-Shimy, S.N.; Dib, M.F.; Abdellatif, H.M.; Baharoon, R.; Gouda, M.M. Investigation of Gamma-Ray Shielding Properties of Bismuth Oxide Nanoparticles with a Bentonite–Gypsum Matrix. Materials 2023, 16, 2056. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Zhu, G.; Zou, Y.; Yan, R.; Liu, Y.; Kang, X.; Dai, Y. Neutron/Gamma Radial Shielding Design of Main Vessel in a Small Modular Molten Salt Reactor. J. Nucl. Eng. 2023, 4, 213–227. [Google Scholar] [CrossRef]
- Gouda, M.M.; El-Khatib, A.M.; Abbas, M.I.; Al-Balawi, S.M.; Alabsy, M.T. Gamma Attenuation Features of White Cement Mortars Reinforced by Micro/Nano Bi2O3 Particles. Materials 2023, 16, 1580. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Efthimiou, G.; Wang, Y.; Huang, M. Comparisons between a new point kernel-based scheme and the infinite plane source assumption method for radiation calculation of deposited airborne radionuclides from nuclear power plants. J. Environ. Radioact. 2018, 184–185, 32–45. [Google Scholar] [CrossRef]
- Petrányi, J. Development of Radiation Shielded Vehicle and on-board monitoring system in the Service of Emergency Responders. In Proceedings of the 5th European International Radiation Protection Association IRPA Congress, The Hague, The Netherlands, 4–8 June 2018; Volume 5, p. 161. Available online: https://irpa2018europe.com/wp-content/uploads/2019/05/Book-of-Abstracts-v11.pdf (accessed on 8 March 2024).
- Alresheedi, M.T.; Elsafi, M. Effect of Waste Iron Filings (IF) on Radiation Shielding Feature of Polyepoxide Composites. Crystals 2023, 13, 1168. [Google Scholar] [CrossRef]
- Omori, T.; Kato, S. Verification of an Efficient Monte Carlo Model that Interchanges the Geometric Shapes of Plane Source and Detector in Radiation Transport Calculation. Jpn. J. Health Phys. 2020, 55, 40–45. [Google Scholar] [CrossRef]
- Namito, Y.; Nakamura, H.; Toyoda, A.; Iijima, K.; Iwase, H.; Ban, S.; Hirayama, H. Transformation of a system consisting of plane isotropic source and unit sphere detector into a system consisting of point isotropic source and plane detector in Monte Carlor radiation transport calculation. J. Nucl. Sci. Technol. 2012, 49, 167–172. [Google Scholar] [CrossRef]
- Valentin, J. A Report of The International Commission on Radiological Protection. 2005. Available online: https://pubmed.ncbi.nlm.nih.gov/16164984/ (accessed on 8 March 2024).
- Gméling, K.; Szilágyi, V.; Harsányi, I.; Szentmiklósi, L. Hungarian Fine-to-Coarse Aggregate, a Possible Constituent of Near-Vessel Structural Concrete of Nuclear Power Plants. Materials 2023, 16, 3520. [Google Scholar] [CrossRef] [PubMed]
- Gamma Technical Corporation, Budapest, Hungary. Class-2 Threaded Filter. 2024. Available online: https://gammatech.hu/?mnuGrp=mnuProducts&module=products&lang=eng&group=vedofelszerelesek_industrial&product=class2 (accessed on 8 March 2024).
- Golovko, V.V.; Kamaev, O.; Sun, J. Unveiling Insights: Harnessing the Power of the Most-Frequent-Value Method for Sensor Data Analysis. Sensors 2023, 23, 8856. [Google Scholar] [CrossRef]
- Artifex Simulation and Training Systems Ltd., Budapest, Hungary. MARCUS Comprehensive constructive simulation. 2024. Available online: http://artifex.hu/en/marcus (accessed on 8 March 2024).
- The European Union. Chemical, Biological, Radiological and Nuclear Reconnaissance and Surveillance System (CBRN RSS). 2020. Available online: https://defence-industry-space.ec.europa.eu/system/files/2021-06/EDIDP2020_factsheet_CBRN__DEWS_CBRN-RSS.pdf (accessed on 8 March 2024).
- The European Union. Chemical, Biological, Radiological and Nuclear (CBRN) Surveillance as a Service (CBRN SaaS) 2018. Available online: https://www.pesco.europa.eu/wp-content/uploads/2019/05/CELEX_32018D1797_EN_TXT.pdf (accessed on 8 March 2024).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Shielding Efficiency (1-H*(10)shielded/H*(10)unshielded) [1/1] | ||||
|---|---|---|---|---|
| 241Am | 133Ba | 137Cs | 60Co | |
| Pedestrian | 0 | 0 | 0 | 0 |
| Normal vehicle | 0.9 | 0.5 | 0.2 | 0.1 |
| Vehicle with shielding | 1 | 0.9 | 0.7 | 0.6 |
| Vehicle with heavy shielding | 1 | 0.9 | 0.8 | 0.7 |
| Effective Dose for Paths 1–5 [μSv] | Path 1 | Path 2 | Path 3 | Path 4 | Path 5 |
|---|---|---|---|---|---|
| Dose without shielding | 3.3 | 4.5 | 2.7 | 2.5 | 5.3 |
| Dose with shielding | 1.2 | 1.3 | 1.1 | 1.0 | 1.2 |
| Concentration of the Radionuclides in Air [kBq/m3] | Surface Contamination (Activity Concentration) [kBq/m2] | |||||||
|---|---|---|---|---|---|---|---|---|
| 131I | 137Cs | 144Ce | 141Ce | 137Cs | 134Cs | 144Ce | 95Zr | 95Nb |
| 100 | 0.7 | 9.4 | 1600 | 5000 | 2000 | 55,500 | 28,700 | 53,700 |
| Scenarios | Filtration Efficiency [%] | Shielding Efficiency [1/1] |
|---|---|---|
| Pedestrian | 0 | 0 |
| Pedestrian with PPE | 90 | 0 |
| Normal vehicle with PPE | 90 | 0.33 |
| Vehicle with shielding and collective air filter | 99.5 | 0.75 |
| Vehicle with heavy shielding and collective air filter | 99.5 | 0.82 |
| Scenarios | Committed Effective Dose Rate [µSv/h] | External Effective Dose Rate [µSv/h] | Total Effective Dose Rate [µSv/h] |
|---|---|---|---|
| Pedestrian | 11,013 | 247 | 11,260 |
| Pedestrian with PPE | 1101 | 247 | 1348 |
| Normal vehicle with PPE | 1101 | 165 | 1267 |
| Vehicle with shielding and collective air filter | 55 | 62 | 117 |
| Vehicle with heavy shielding and collective air filter | 55 | 44 | 99 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zsitnyányi, A.; Petrányi, J.; Jónás, J.; Garai, Z.; Kátai-Urbán, L.; Zádori, I.; Kobolka, I. Applicability of an Ionising Radiation Measuring System for Real-Time Effective-Dose-Optimised Route Finding Solution during Nuclear Accidents. Fire 2024, 7, 142. https://doi.org/10.3390/fire7040142
Zsitnyányi A, Petrányi J, Jónás J, Garai Z, Kátai-Urbán L, Zádori I, Kobolka I. Applicability of an Ionising Radiation Measuring System for Real-Time Effective-Dose-Optimised Route Finding Solution during Nuclear Accidents. Fire. 2024; 7(4):142. https://doi.org/10.3390/fire7040142
Chicago/Turabian StyleZsitnyányi, Attila, János Petrányi, Jácint Jónás, Zoltán Garai, Lajos Kátai-Urbán, Iván Zádori, and István Kobolka. 2024. "Applicability of an Ionising Radiation Measuring System for Real-Time Effective-Dose-Optimised Route Finding Solution during Nuclear Accidents" Fire 7, no. 4: 142. https://doi.org/10.3390/fire7040142
APA StyleZsitnyányi, A., Petrányi, J., Jónás, J., Garai, Z., Kátai-Urbán, L., Zádori, I., & Kobolka, I. (2024). Applicability of an Ionising Radiation Measuring System for Real-Time Effective-Dose-Optimised Route Finding Solution during Nuclear Accidents. Fire, 7(4), 142. https://doi.org/10.3390/fire7040142